High-Throughput Ground Cover Classification of Perennial Ryegrass (Lolium Perenne L.) for the Estimation of Persistence in Pasture Breeding

 ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. The Study Site
2.2. Visual Pasture Ground Fraction Estimation
2.3. Dry Weight Ranking for Pasture Senescent Estimation
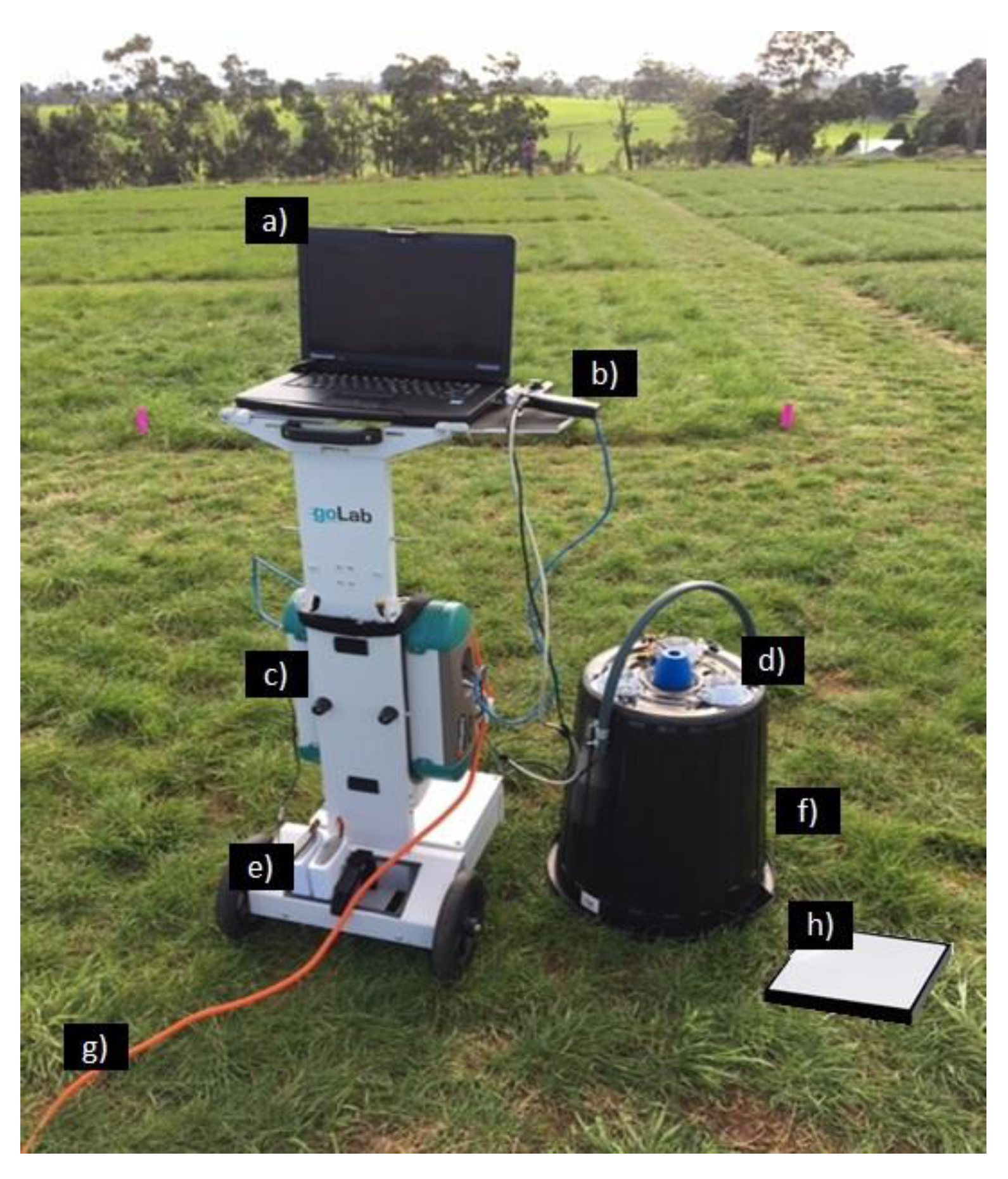
2.4. Ground-Based Spectra Collection
2.5. Ground-Based Image Acquisition
Airborne Multispectral Image Acquisition
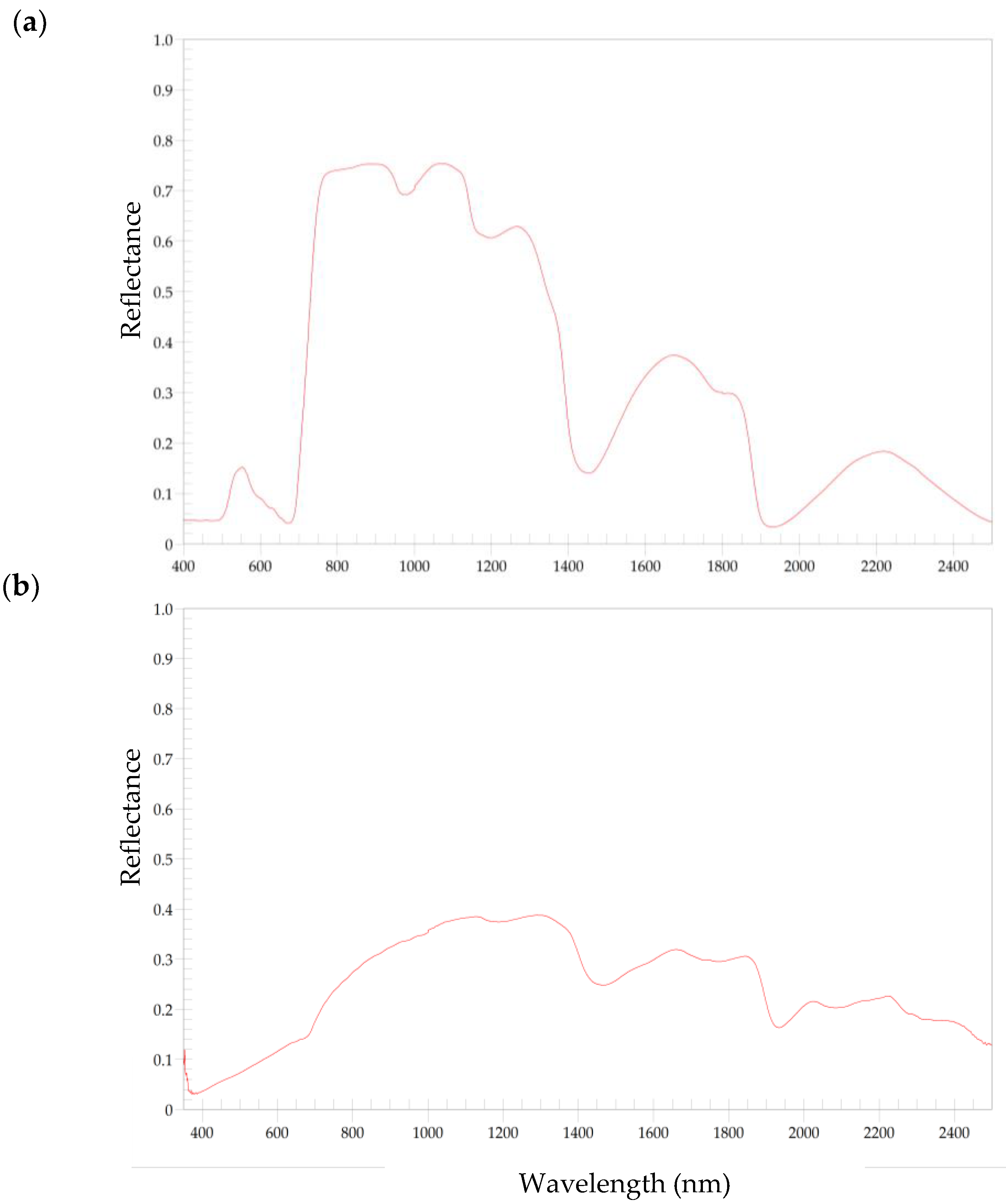
2.6. Hyperspectral Data Extraction
2.7. Data Extraction from Airborne Multispectral Images
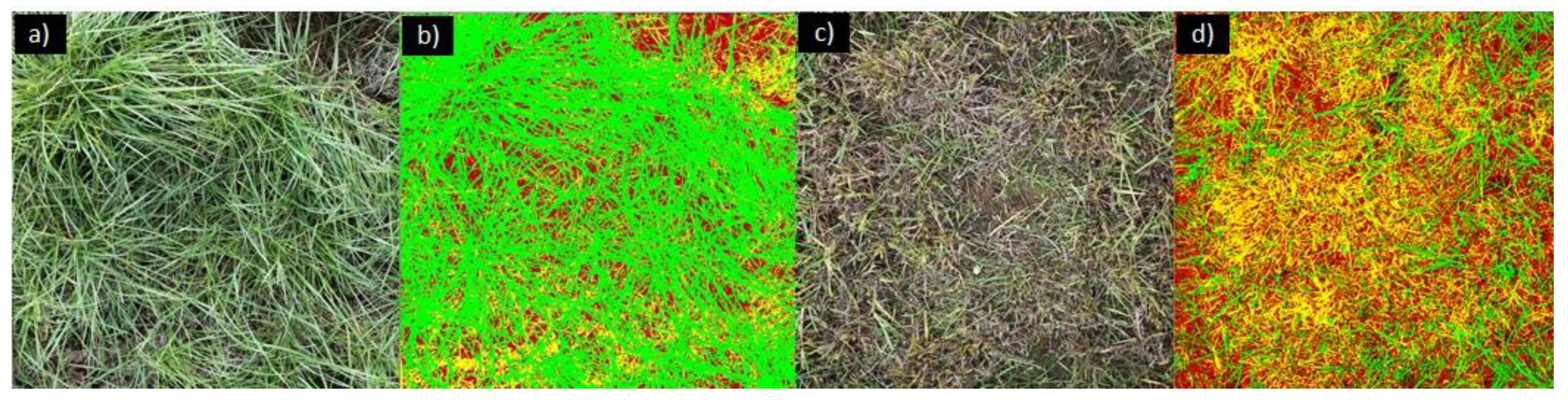
2.8. Data Extraction from Ground-Based RGB Images
2.9. Data Analysis
3. Results
3.1. Validation of K-Nearest Neighbor Analysis for Ground Cover Classification
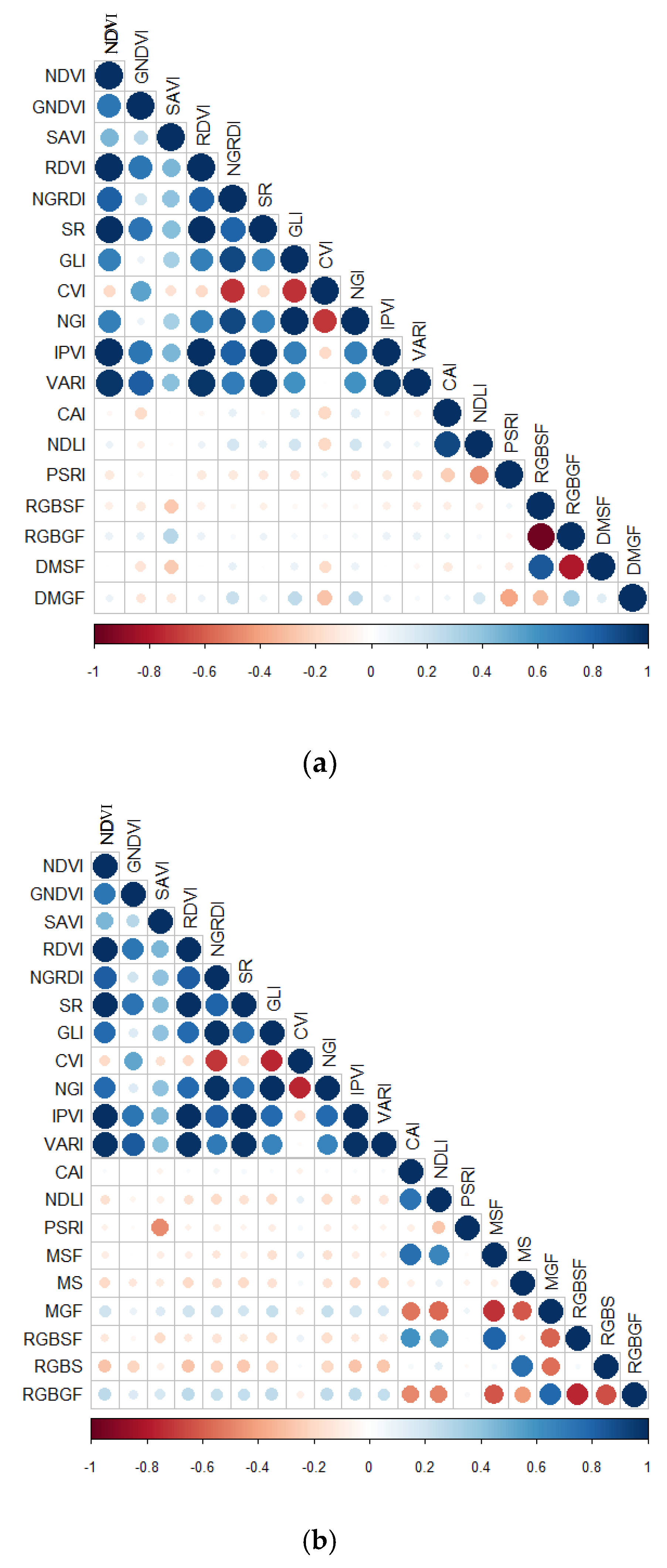
3.2. Optimum Vegetation Indices for Ground Cover Classification
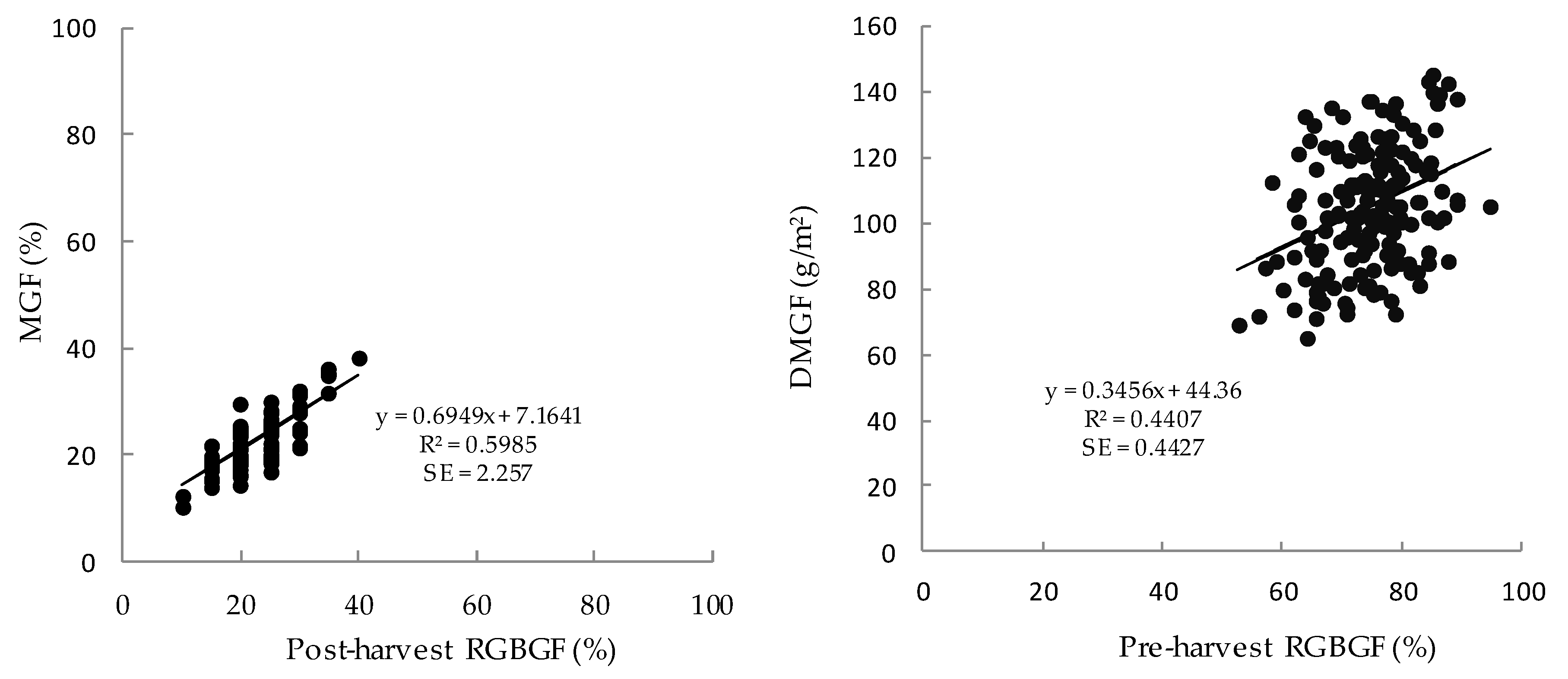
3.3. Prediction of Green Fraction (Figure 7)
3.4. Prediction of Bare Ground (Figure 8)
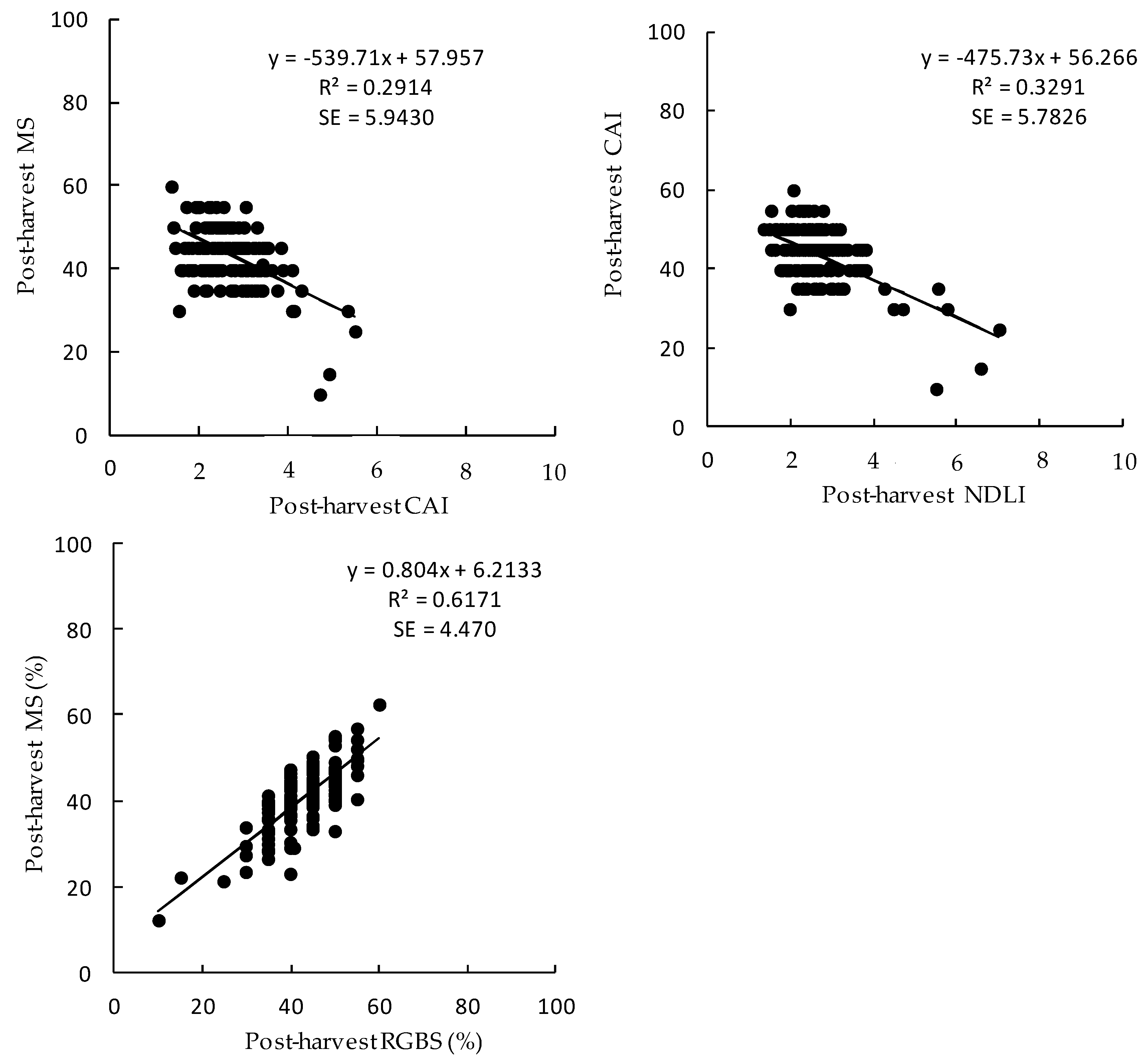
3.5. Prediction of Senescent Fraction (Figure 9)
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jayasinghe, C.; Badenhorst, P.; Wang, J.; Jacobs, J.; Spangenberg, G.; Smith, K. An Object-Based Image Analysis Approach to Assess Persistence of Perennial Ryegrass (Lolium perenne L.) in Pasture Breeding. Agronomy 2019, 9, 501. [Google Scholar] [CrossRef] [Green Version]
- Wilkins, P.W. Breeding perennial ryegrass for agriculture. Euphytica 1991, 52, 201–214. [Google Scholar] [CrossRef]
- Scott, B.; Roberts, A.; Conyers, M. Management of soil acidity in long-term pastures of south-eastern Australia: A review. Anim. Prod. Sci. 2001, 40, 1173–1198. [Google Scholar] [CrossRef]
- Shakhane, L.M.; Mulcahy, C.; Scott, J.M.; Hinch, G.N.; Donald, G.E.; Mackay, D.F. Pasture herbage mass, quality and growth in response to three whole-farmlet management systems. Anim. Prod. Sci. 2013, 53, 685–698. [Google Scholar] [CrossRef] [Green Version]
- Doyle, C.; Lazenby, A. The effect of stocking rate and fertilizer usage on income variability for dairy farms in England and Wales. Grass Forage Sci. 2006, 39, 117–127. [Google Scholar] [CrossRef]
- McKenzie, F.R.; Jacobs, J.L.; Kearney, G. Effects of spring grazing on dryland perennial ryegrass/white clover dairy pastures. 1. Pasture accumulation rates, dry matter consumed yield, and nutritive characteristics. Aust. J. Agric. Res. 2006, 57, 543–554. [Google Scholar] [CrossRef]
- Malcolm, B.; Smith, K.F.; Jacobs, J.L. Perennial pasture persistence: The economic perspective. Crop Pasture Sci. 2014, 65, 713–720. [Google Scholar] [CrossRef]
- Woodward, S.J.R. Quantifying different causes of leaf and tiller death in grazed perennial ryegrass swards. N. Z. J. Agric. Res. 1998, 41, 149–159. [Google Scholar] [CrossRef]
- Allen, V.G.; Batello, C.; Berretta, E.J.; Hodgson, J.; Kothmann, M.; Li, X.; McIvor, J.; Milne, J.; Morris, C.; Peeters, A.; et al. An international terminology for grazing lands and grazing animals. Grass Forage Sci. 2011, 66, 2–28. [Google Scholar] [CrossRef]
- Makanza, R.; Zaman-Allah, M.; Cairns, J.E.; Magorokosho, C.; Tarekegne, A.; Olsen, M.; Prasanna, B.M. High-Throughput Phenotyping of Canopy Cover and Senescence in Maize Field Trials Using Aerial Digital Canopy Imaging. Remote Sens. 2018, 10, 330. [Google Scholar] [CrossRef] [Green Version]
- Gebremedhin, A.; Badenhorst, P.E.; Wang, J.; Spangenberg, G.C.; Smith, K.F. Prospects for Measurement of Dry Matter Yield in Forage Breeding Programs Using Sensor Technologies. Agronomy 2019, 9, 65. [Google Scholar] [CrossRef] [Green Version]
- Smith, C.; Cogan, N.; Badenhorst, P.; Spangenberg, G.; Smith, K. Field Spectroscopy to Determine Nutritive Value Parameters of Individual Ryegrass Plants. Agronomy 2019, 9, 293. [Google Scholar] [CrossRef] [Green Version]
- Borra-Serrano, I.; De Swaef, T.; Aper, J.; Ghesquiere, A.; Mertens, K.; Nuyttens, D.; Saeys, W.; Somers, B.; Vangeyte, J.; Roldán-Ruiz, I.; et al. Towards an objective evaluation of persistency of Lolium perenne swards using UAV imagery. Euphytica 2018, 214, 142. [Google Scholar] [CrossRef]
- Aase, J.K.; Tanaka, D.L. Reflectances from Four Wheat Residue Cover Densities as Influenced by Three Soil Backgrounds. Agron. J. 1991, 83, 753–757. [Google Scholar] [CrossRef]
- Qi, J.; Marsett, R.; Heilman, P.; Bieden-bender, S.; Moran, S.; Goodrich, D.; Weltz, M. RANGES improves satellite-based information and land cover assessments in southwest United States. Eos Trans. Am. Geophys. Union 2002, 83, 601–606. [Google Scholar] [CrossRef]
- Daughtry, C. Discriminating Crop Residues from Soil by Shortwave Infrared Reflectance. Agron. J. 2001, 93, 125–131. [Google Scholar] [CrossRef]
- Ren, H.; Zhou, G.; Zhang, F.; Zhang, X. Evaluating cellulose absorption index (CAI) for non-photosynthetic biomass estimation in the desert steppe of Inner Mongolia. Chin. Sci. Bull. 2012, 57, 1716–1722. [Google Scholar] [CrossRef] [Green Version]
- Roberts, D.A.; Smith, M.O.; Adams, J.B. Green vegetation, nonphotosynthetic vegetation, and soils in AVIRIS data. Remote Sens. Environ. 1993, 44, 255–269. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; McMurtrey, J.E.; Chappelle, E.W.; Hunter, W.J.; Steiner, J.L. Measuring crop residue cover using remote sensing techniques. Theor. Appl. Climatol. 1996, 54, 17–26. [Google Scholar] [CrossRef]
- Ren, S.; Chen, X.; An, S. Assessing plant senescence reflectance index-retrieved vegetation phenology and its spatiotemporal response to climate change in the Inner Mongolian Grassland. Int. J. Biometeorol. 2017, 61, 601–612. [Google Scholar] [CrossRef]
- Kim, J.Y. Roadmap to High Throughput Phenotyping for Plant Breeding. J. Biosyst. Eng. 2020, 45, 43–55. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; McMurtrey, J.E.; Kim, M.S.; Chappelle, E.W. Estimating crop residue cover by blue fluorescence imaging. Remote Sens. Environ. 1997, 60, 14–21. [Google Scholar] [CrossRef]
- Cai, J.; Okamoto, M.; Atieno, J.; Sutton, T.; Li, Y.; Miklavcic, S.J. Quantifying the Onset and Progression of Plant Senescence by Color Image Analysis for High Throughput Applications. PLoS ONE 2016, 11, e0157102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Beggan, C.; Hamilton, C. New image processing software for analyzing object size-frequency distributions, geometry, orientation, and spatial distribution. Comput. Geosci. 2009, 36, 539–549. [Google Scholar] [CrossRef]
- Bieniecki, W.; Grabowski, S. Nearest neighbor classifiers for color image segmentation. In Proceedings of the International Conference Modern Problems of Radio Engineering, Telecommunications and Computer Science, Lviv-Slavsko, Ukraine, 28 February 2004. [Google Scholar] [CrossRef]
- Dingle Robertson, L.; King, D.J. Comparison of pixel- and object-based classification in land cover change mapping. Int. J. Remote Sens. 2011, 32, 1505–1529. [Google Scholar] [CrossRef]
- Rehman, T.; Mahmud, M.; Chang, Y.; Jin, J.; Shin, J. Current and future applications of statistical machine learning algorithms for agricultural machine vision systems. Comput. Electron. Agric. 2018, 156, 585–605. [Google Scholar] [CrossRef]
- McCormick, L.H.; Lodge, G.M. A field kit for producers to assess pasture health in the paddock. In Proceedings of the 10th Australian Agronomy Conference, Hobart, Tasmania, 28 January–1 February 2001. [Google Scholar]
- Mannetje, L.; Haydock, K.P. The dry-weight-rank method for the botanical analysis of pasture. Grass Forage Sci. 1963, 18, 268–275. [Google Scholar] [CrossRef]
- Erdle, K.; Mistele, B.; Schmidhalter, U. Comparison of active and passive spectral sensors in discriminating biomass parameters and nitrogen status in wheat cultivars. Field Crops Res. 2011, 124, 74–84. [Google Scholar] [CrossRef]
- Hunt, R.; Hively, W.; McCarty, G.; Daughtry, C.; Forrestal, P.; Kratochvil, R.; Carr, J.; Allen, N.; Fox-Rabinovitz, J.; Miller, C. NIR-Green-Blue High-Resolution Digital Images for Assessment of Winter Cover Crop Biomass. GISci. Remote Sens. 2011, 48, 86–98. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Tremblay, N.; Zarco-Tejada, P.J.; Dextraze, L. Integrated narrow-band vegetation indices for prediction of crop chlorophyll content for application to precision agriculture. Remote Sens. Environ. 2002, 81, 416–426. [Google Scholar] [CrossRef]
- Fu, Y.; Yang, G.; Wang, J.; Feng, H. A comparative analysis of spectral vegetation indices to estimate crop leaf area index. Intell. Autom. Soft Comput. 2013, 19, 315–326. [Google Scholar] [CrossRef]
- Prabhakara, K.; Hively, W.D.; McCarty, G.W. Evaluating the relationship between biomass, percent groundcover and remote sensing indices across six winter cover crop fields in Maryland, United States. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 88–102. [Google Scholar] [CrossRef] [Green Version]
- Jordan, C.F. Derivation of Leaf-Area Index from Quality of Light on the Forest Floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Louhaichi, M.; Borman, M.M.; Johnson, D.E. Spatially Located Platform and Aerial Photography for Documentation of Grazing Impacts on Wheat. Geocarto Int. 2001, 16, 65–70. [Google Scholar] [CrossRef]
- Vincini, M.; Frazzi, E. Comparing narrow and broad-band vegetation indices to estimate leaf chlorophyll content in planophile crop canopies. Precis. Agric. 2011, 12, 334–344. [Google Scholar] [CrossRef]
- Woebbecke, D.M.; Meyer, G.E.; Von Bargen, K.; Mortensen, D.A. Color Indices for Weed Identification Under Various Soil, Residue, and Lighting Conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Payero, J.O.; Christopher, N.; Wright, J.L. Comparison of eleven vegetation indices for estimating plant height of alfalfa and grass. Appl. Eng. Agric. 2004, 20, 385–393. [Google Scholar] [CrossRef] [Green Version]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel algorithms for remote estimation of vegetation fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef] [Green Version]
- Nagler, P.; Inoue, Y.; Glenn, E.; Russ, A.; Daughtry, C. Cellulose absorption index (CAI) to quantify mixed soil–plant litter scenes. Remote Sens. Environ. 2003, 87, 310–325. [Google Scholar] [CrossRef]
- Waller, R.A.; Sale, P.W.G. Persistence and productivity of perennial ryegrass in sheep pastures in south-western Victoria: A review. Aust. J. Exp. Agric. 2001, 41, 117–144. [Google Scholar] [CrossRef]
- Najafi, P.; Navid, H.; Feizizadeh, B.; Eskandari, I. Remote sensing for crop residue cover recognition: A review. Agric. Eng. Int. CIGR E-J. 2018, 20, 63–69. [Google Scholar]
- Bannari, A.; Staenz, K.; Khurshid, K.S. Remote sensing of crop residue using Hyperion (EO-1) data. In Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 2795–2799. [Google Scholar]
- Daughtry, C.; Hunt, E.R.; Doraiswamy, P.C.; McMurtrey, J.E. Remote Sensing the Spatial Distribution of Crop Residues. Agron. J. 2005, 97, 864–871. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; Hunt, E.R.; McMurtrey, J.E. Assessing crop residue cover using shortwave infrared reflectance. Remote Sens. Environ. 2004, 90, 126–134. [Google Scholar] [CrossRef]
- Zhao, F.; Xu, B.; Yang, X.; Jin, Y.; Li, J.; Xia, L.; Chen, S.; Ma, H. Remote Sensing Estimates of Grassland Aboveground Biomass Based on MODIS Net Primary Productivity (NPP): A Case Study in the Xilingol Grassland of Northern China. Remote Sens. 2014, 6, 5368–5386. [Google Scholar] [CrossRef] [Green Version]
- Higgins, M.A.; Asner, G.P.; Perez, E.; Elespuru, N.; Alonso, A. Variation in photosynthetic and nonphotosynthetic vegetation along edaphic and compositional gradients in northwestern Amazonia. Biogeosciences 2014, 11, 3505–3513. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight | Image Overlap Forward/Side | Flight Speed (m/s) | Flight Height (m) | Georeferencing Mean RMS Error (m) | GSD (cm/pixels) |
|---|---|---|---|---|---|
| Pre-harvest | 80%/75% | 6 | 30 | 0.019 | 2.26 |
| Post-harvest | 80%/75% | 6 | 30 | 0.010 | 2.16 |
| Vegetation Index | Abbreviation | Equation |
|---|---|---|
| Normalised Difference Vegetation Index | NDVI | (Rn − Rr)/(Rn + Rr) [11,30] |
| Green Normalised Difference Vegetation Index | GNDVI | (Rn − Rg)/(Rn + Rg) [31] |
| Soil Adjusted Vegetation Index | SAVI | (Rn − Rr)/(Rn + Rr + 0.5) × (1 + 0.5) [32] |
| Renormalised Difference Vegetation Index | RDVI | (Rn − Rr)/(Rn + Rr)1/2 [33] |
| Normalised green-Red difference index | NGRDI | (Rg − Rr)/(Rg + Rr)1/2 [34] |
| Simple Ratio Index | SRI | Rn/Rr [35] |
| Green Leaf index | GLI | (2 × Rg − Rr − Rb)/(2 × Rg + Rr + Rb) [36] |
| Chlorophyll Vegetation Index | CVI | Rn × Rr/Rg2 [37] |
| Normalised Green Intensity | NGI | Rg/(Rr + Rg + Rb) [38] |
| Infrared Percentage Vegetation Index | IPVI | Rn/(Rn + Rr) [39] |
| Visible Atmospherically Resistant Index | VARI | (Rn − Rr)/(Rr + Rg + Rb) [40] |
| Parameter | Spearman’s Correlation | p-Value |
|---|---|---|
| RGBSF vs DMSF (Preharvest) | 0.831 | <0.001 |
| RGBGF vs. DMGF (Preharvest) | 0.665 | <0.001 |
| RGBSF vs MSF (Postharvest) | 0.805 | <0.001 |
| RGBGF vs. MGF (Postharvest) | 0.774 | <0.001 |
| RGBS vs. MS (Postharvest) | 0.782 | <0.001 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jayasinghe, C.; Badenhorst, P.; Jacobs, J.; Spangenberg, G.; Smith, K. High-Throughput Ground Cover Classification of Perennial Ryegrass (Lolium Perenne L.) for the Estimation of Persistence in Pasture Breeding. Agronomy 2020, 10, 1206. https://doi.org/10.3390/agronomy10081206
Jayasinghe C, Badenhorst P, Jacobs J, Spangenberg G, Smith K. High-Throughput Ground Cover Classification of Perennial Ryegrass (Lolium Perenne L.) for the Estimation of Persistence in Pasture Breeding. Agronomy. 2020; 10(8):1206. https://doi.org/10.3390/agronomy10081206
Chicago/Turabian StyleJayasinghe, Chinthaka, Pieter Badenhorst, Joe Jacobs, German Spangenberg, and Kevin Smith. 2020. "High-Throughput Ground Cover Classification of Perennial Ryegrass (Lolium Perenne L.) for the Estimation of Persistence in Pasture Breeding" Agronomy 10, no. 8: 1206. https://doi.org/10.3390/agronomy10081206
APA StyleJayasinghe, C., Badenhorst, P., Jacobs, J., Spangenberg, G., & Smith, K. (2020). High-Throughput Ground Cover Classification of Perennial Ryegrass (Lolium Perenne L.) for the Estimation of Persistence in Pasture Breeding. Agronomy, 10(8), 1206. https://doi.org/10.3390/agronomy10081206