
Particulate Matter Dispersion Modeling in Agricultural Applications: Investigation of a Transient Open Source Solver

 ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Solving the Flow Field Phase
2.2. Solving the Particle Phase
3. Validation of the Solver
3.1. Validation of the Flow Solver
3.1.1. Geometry
3.1.2. Meshing
3.1.3. Boundary Conditions
3.1.4. Solver Setup and Turbulence Modeling
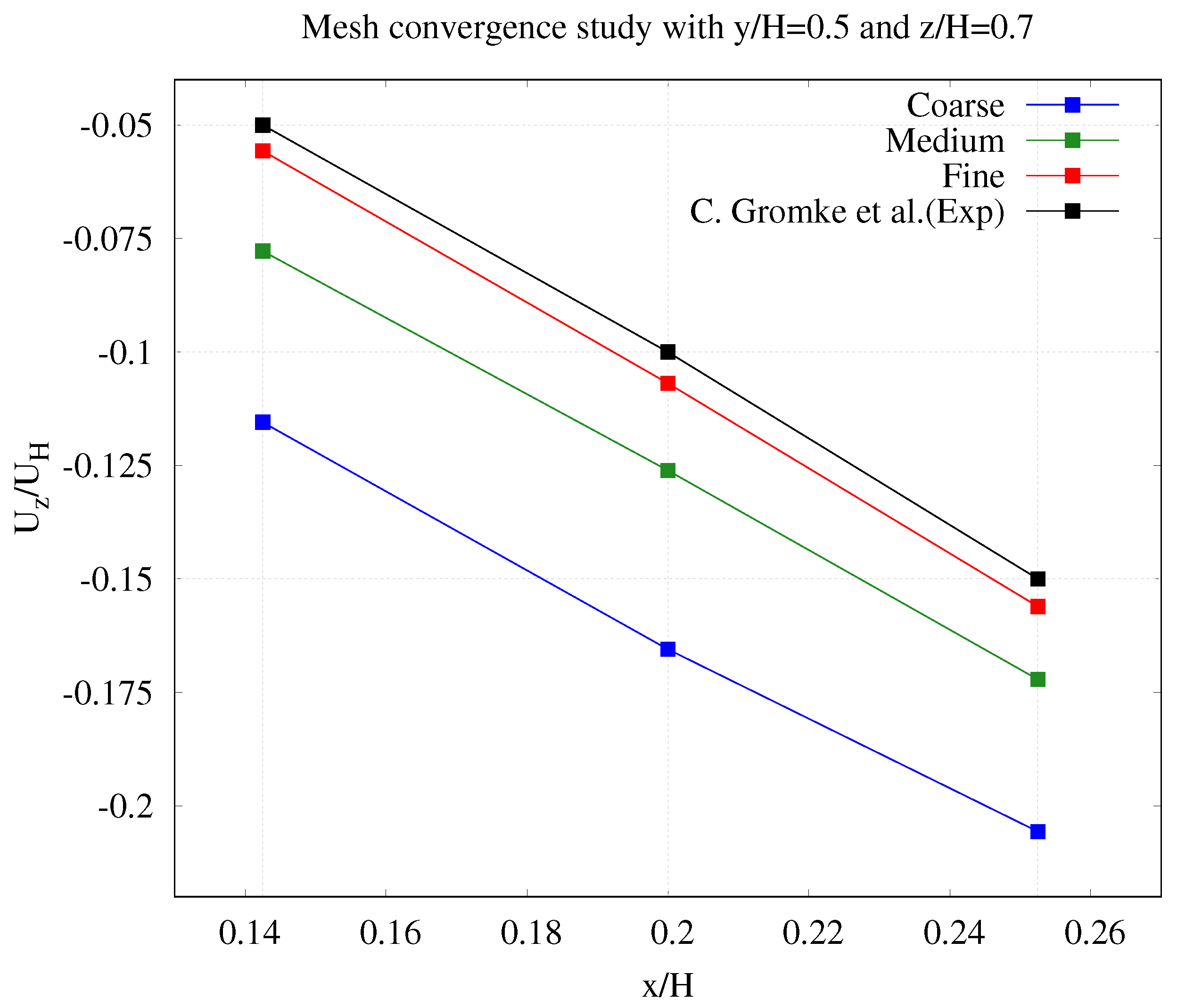
3.1.5. Mesh Convergence
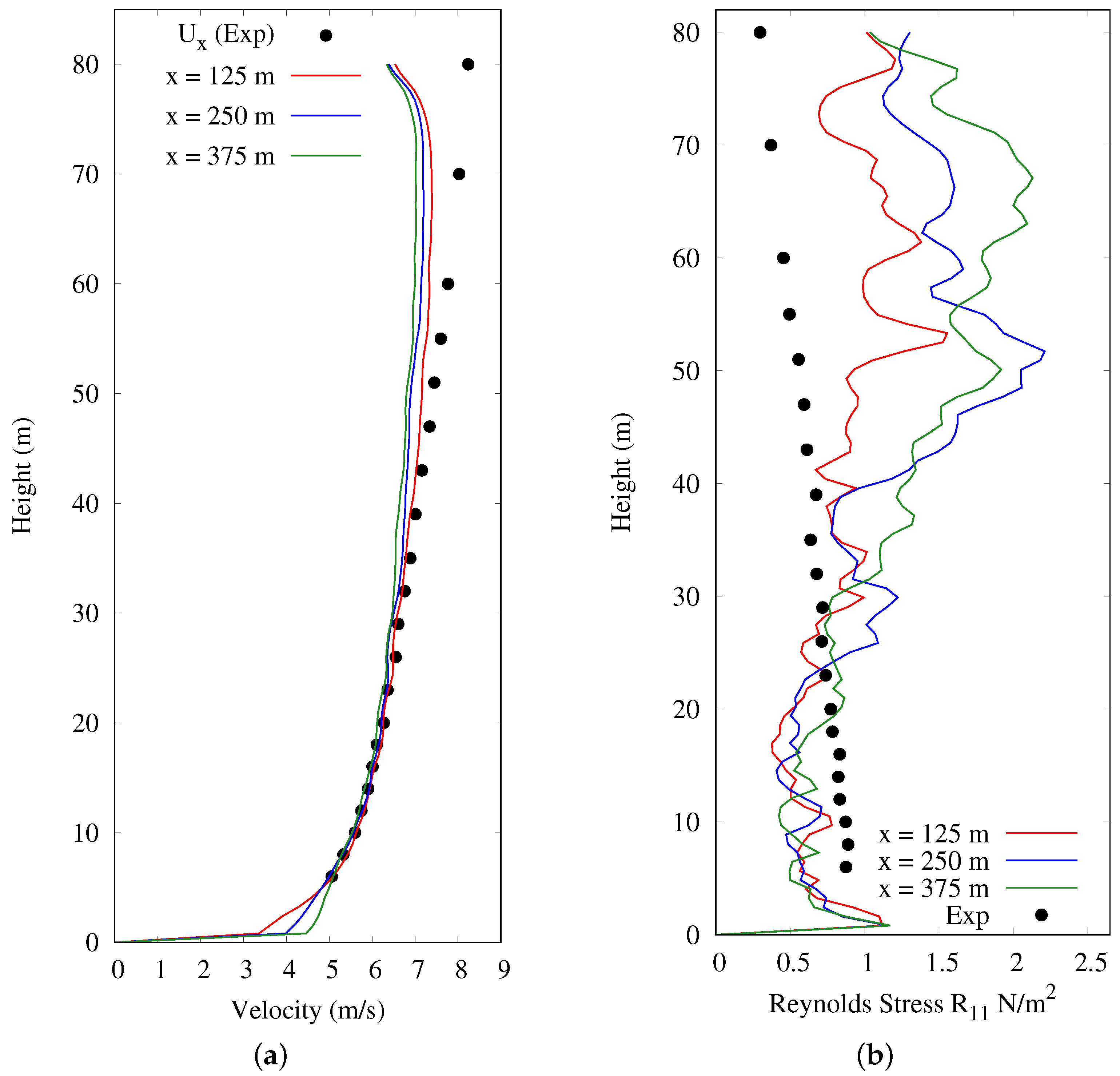
3.1.6. Validation Results of the Flowfield
3.2. Validation of the Particle Transport
3.2.1. Computational Domain and Meshing
3.2.2. Particle Injection and Simulation
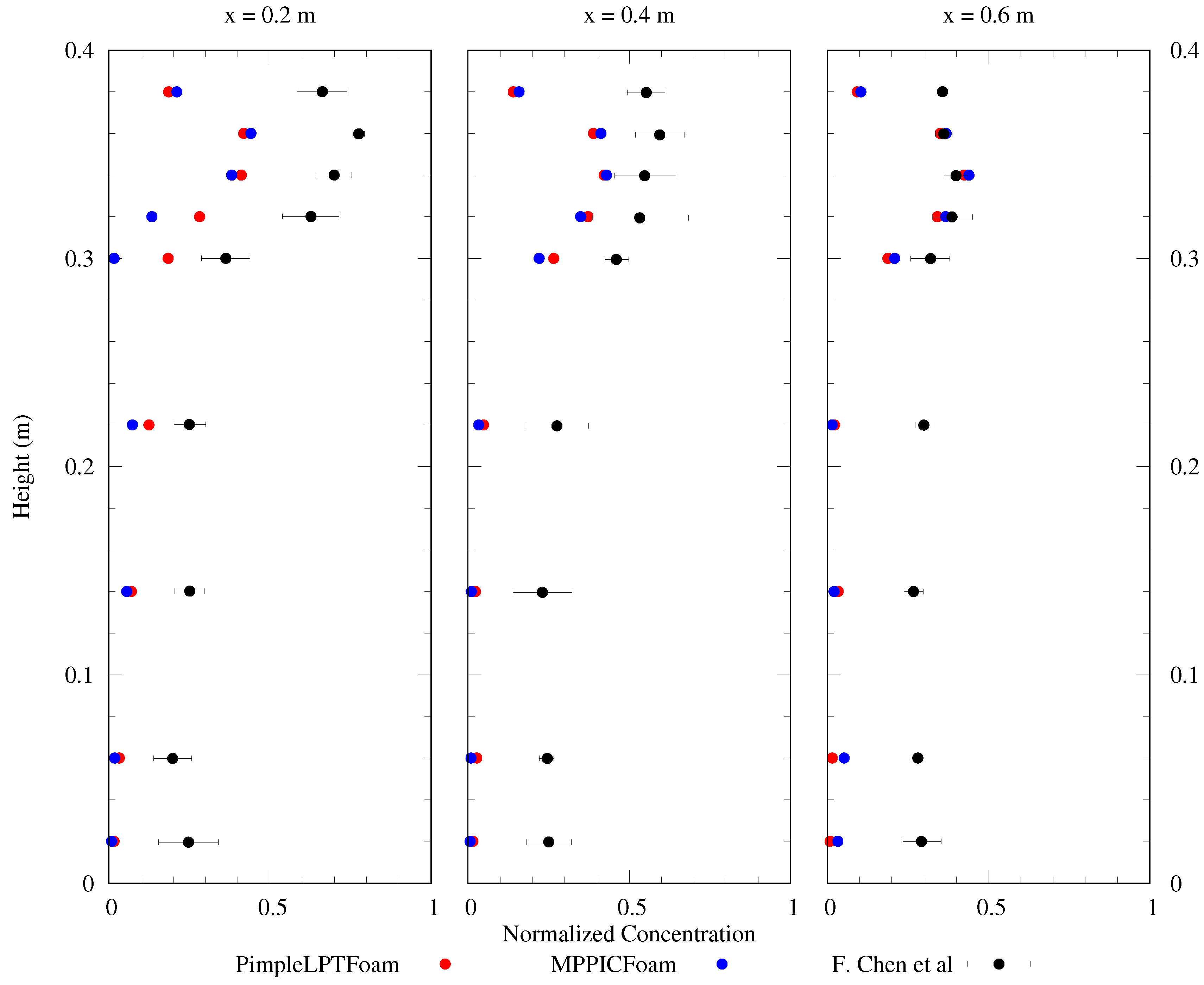
3.2.3. Validation Results of the Particle Transport
4. Modelling of Particulate Matter Dispersion from Manure Application
4.1. Computational Domain
4.2. Turbulent Inlet
4.3. Solver Setup
4.4. Particle Properties
4.5. Results
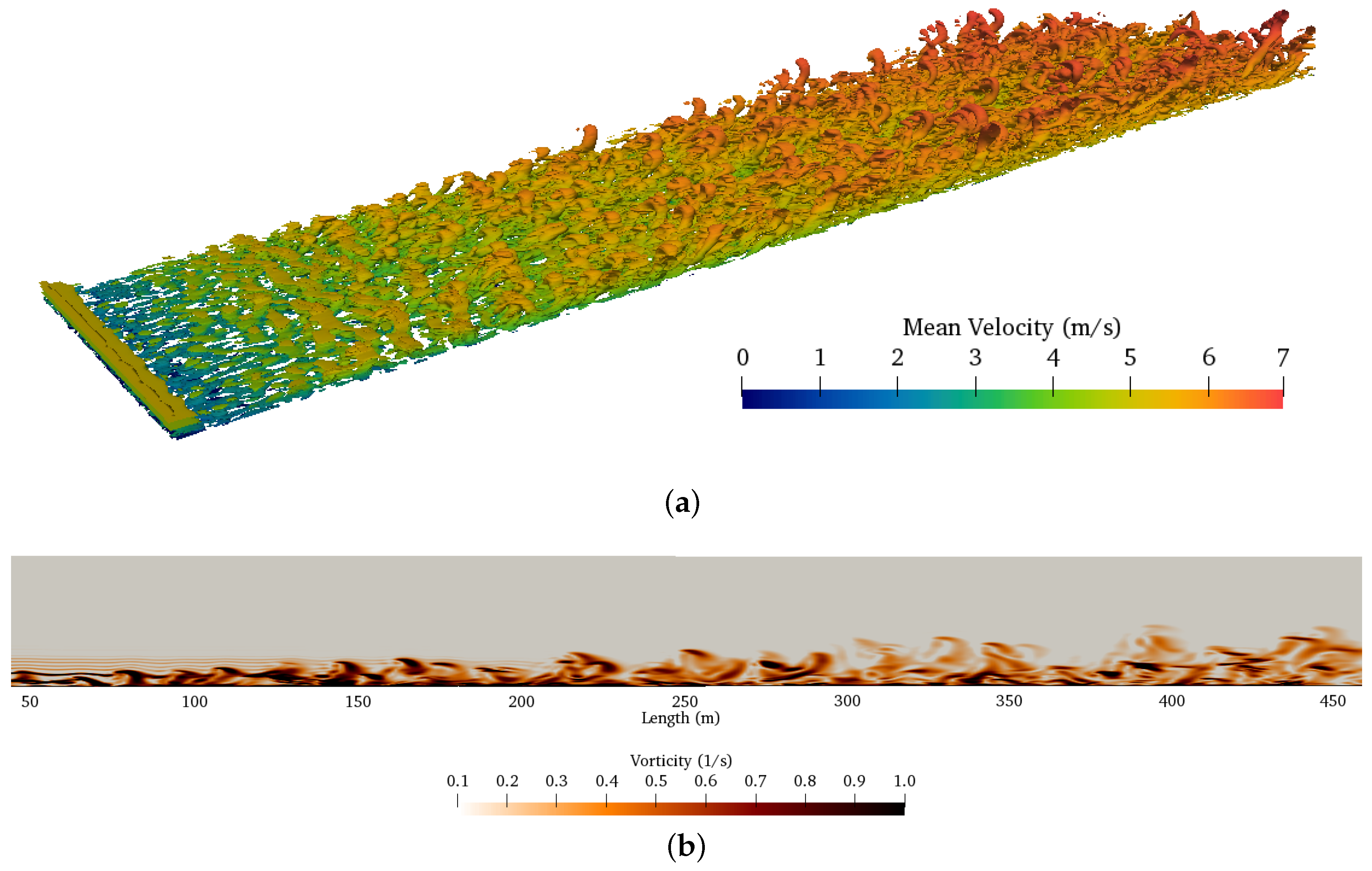
4.5.1. Atmospheric Boundary Layer
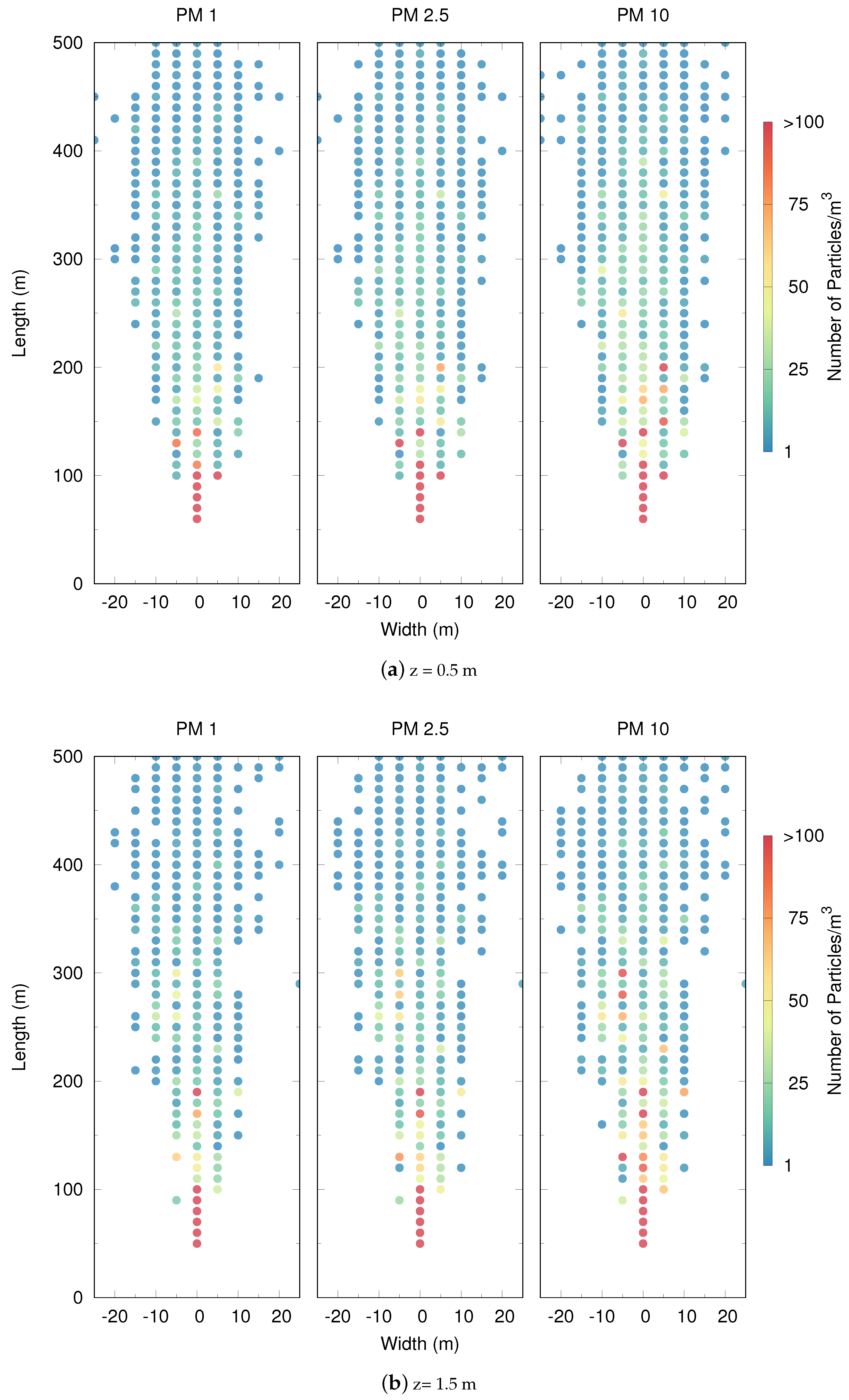
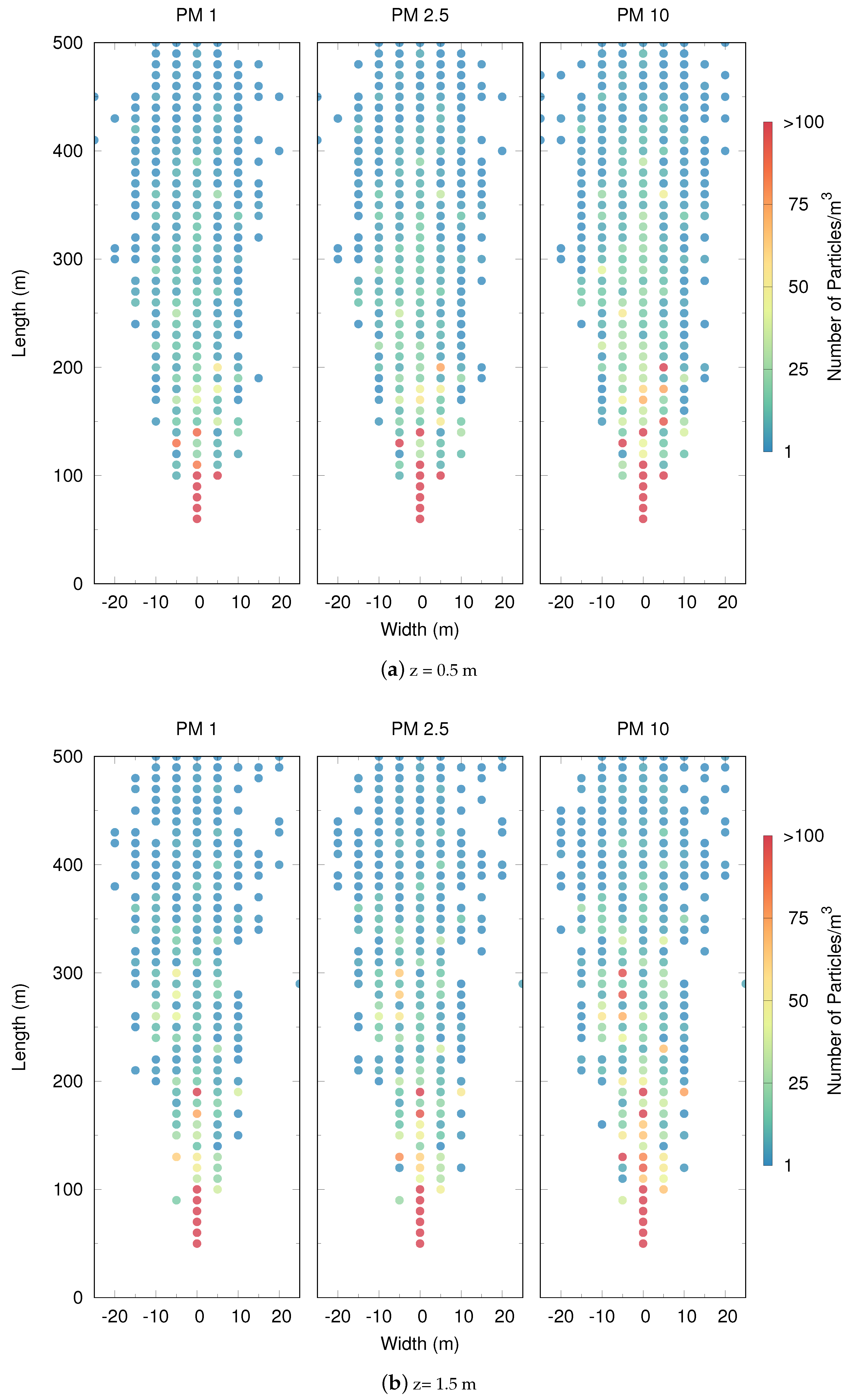
4.5.2. Influence of Size of Particulate Matter
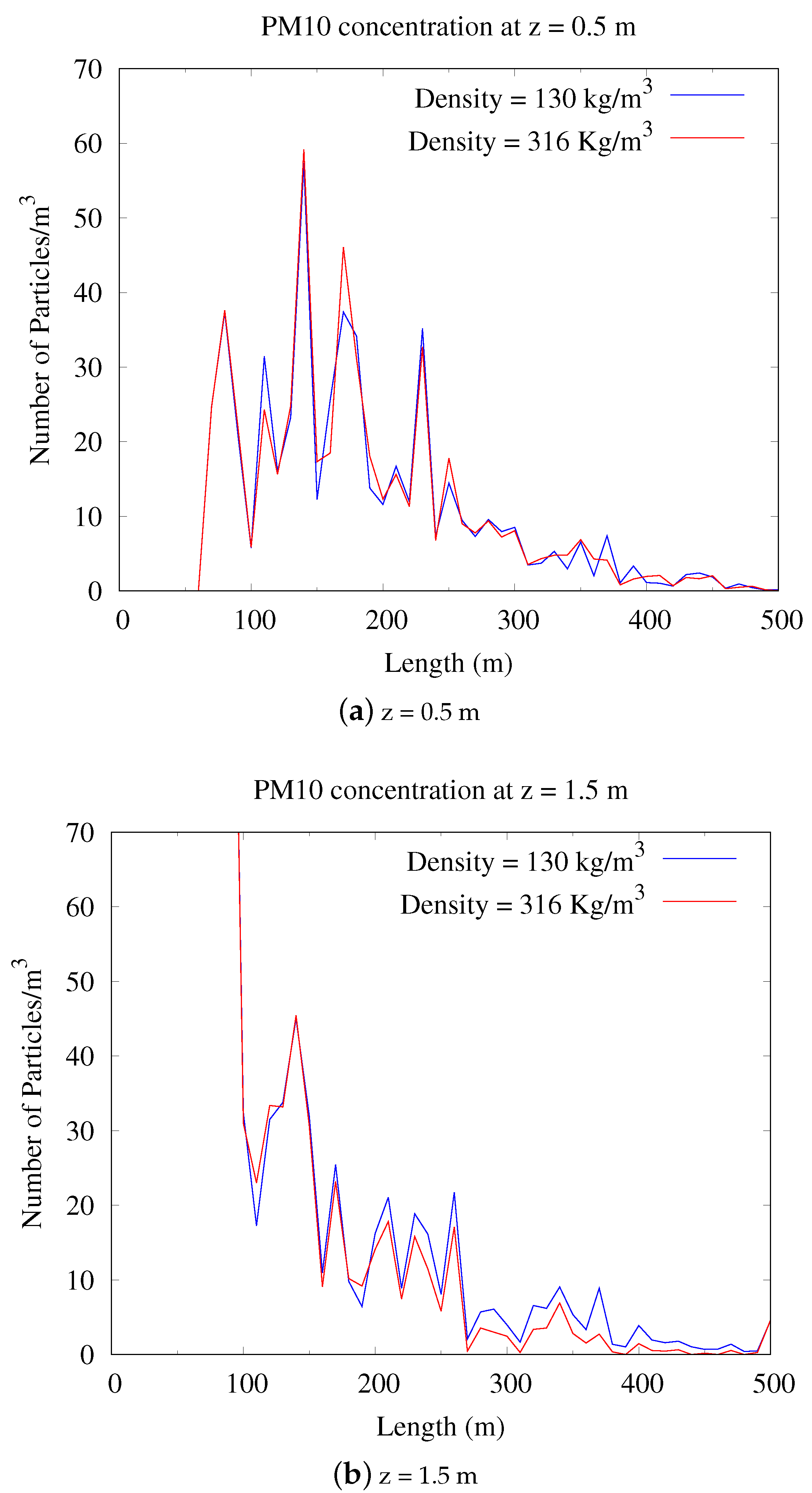
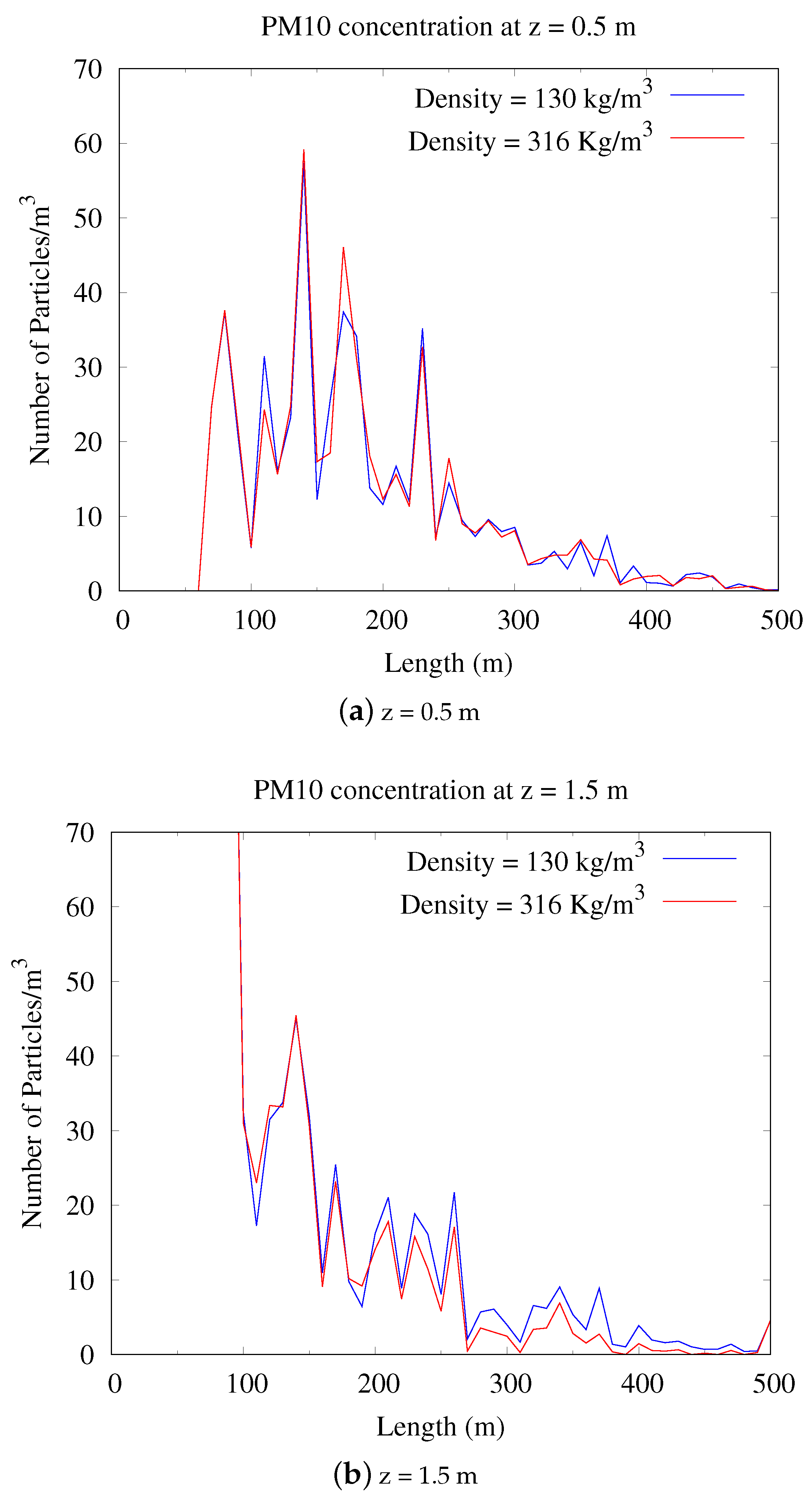
4.5.3. Influence of Density
4.5.4. Risk Estimation
5. Discussion
5.1. Flowfield
5.2. Particle Dispersion
5.3. Application Example
5.4. Performance: Cost-Benefit Ratio
6. Conclusions and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ART | Aerosols and reactive trace gases |
| AQI | Air quality index |
| CFD | Computational fluid dynamics |
| COSMO | Consortium for Small Scale Modelling Europe |
| DEM | Detached-eddy simulation |
| DFSEM | Divergence-free synthetic eddy method |
| DPM | Discrete parcel method |
| DWD | German Weather Service |
| LDA | Laser Doppler anemometry |
| LES | Large eddy simulation |
| LPT | Lagrangian particle tracking |
| MPPIC | Multiphase particle-in-cell method |
| OpenFOAM | Open Source Field Operation and Manipulation |
| PDA | Phase Doppler anemometry |
| PISO | Pressure implicit with splitting of operator |
| PM | Particulate matter |
| SEM | Synthetic eddy method |
| SGS | Subgrid scale |
| SIMPLE | Semi-implicit method for pressure linked equations |
| TKE | Turbulence kinetic energy |
| (U)RANS | (Unsteady) Reynolds-averaged Navier-Stokes equations |
| USEPA | United States Environmental Protection Agency |
| UV | Ultraviolet |
| WALE | Wall-adapting local eddy-viscosity model |
References
- Arslan, S.; Aybek, A. Particulate Matter Exposure in Agriculture. In Air Pollution; Haryanto, B., Ed.; IntechOpen: Rijeka, Croatia, 2012; Chapter 3. [Google Scholar]
- World Health Organisation. Burden of Disease from Ambient Air Pollution; Global Health Observatory Data; World Health Organisation: Geneva, Switzerland, 2014; Available online: https://www.who.int/airpollution/data/AAP_BoD_results_March2014.pdf (accessed on 5 September 2021).
- Aarnink, A.; Ellen, H. Processes and Factors Affecting Dust Emissions from Livestock Production. In How to Improve Air Quality; Wageningen University & Research: Wageningen, The Netherlands, 2007; Available online: https://research.wur.nl/en/publications/processes-and-factors-affecting-dust-emissions-from-livestock-pro (accessed on 5 September 2021).
- Lelieveld, J.; Evans, J.S.; Fnais, M.; Giannadaki, D.; Pozzer, A. The contribution of outdoor air pollution sources to premature mortality on a global scale. Nature 2015, 525, 367–371. [Google Scholar] [CrossRef] [PubMed]
- Bundesamt, S. Wirtschaftsduenger Tierischer Herkunft in Landwirtschaftlichen Betrieben/Agrarstrukturerhebung-Fachserie 3 Reihe 2.2.2-2016; Statistisches Bundesamt: Wiesbaden, Germany, 2017. Available online: https://www.destatis.de/DE/Themen/Branchen-Unternehmen/Landwirtschaft-Forstwirtschaft-Fischerei/Produktionsmethoden/Publikationen/Downloads-Produktionsmethoden/wirtschaftsduenger-2030222169005.html (accessed on 5 September 2021).
- Funk, R.; Reuter, H.I.; Hoffmann, C.; Engel, W.; Öttl, D. Effect of moisture on fine dust emission from tillage operations on agricultural soils. Earth Surf. Process. Landf. J. Br. Geomorphol. Res. Group 2008, 33, 1851–1863. [Google Scholar] [CrossRef]
- Maffia, J.; Dinuccio, E.; Amon, B.; Balsari, P. PM emissions from open field crop management: Emission factors, assessment methods and mitigation measures—A review. Atmos. Environ. 2020, 226, 117381. [Google Scholar] [CrossRef]
- Takai, H.; Pedersen, S.; Johnsen, J.O.; Metz, J.; Koerkamp, P.G.; Uenk, G.; Phillips, V.; Holden, M.; Sneath, R.; Short, J.; et al. Concentrations and emissions of airborne dust in livestock buildings in Northern Europe. J. Agric. Eng. Res. 1998, 70, 59–77. [Google Scholar] [CrossRef] [Green Version]
- Cambra-López, M.; Aarnink, A.J.; Zhao, Y.; Calvet, S.; Torres, A.G. Airborne particulate matter from livestock production systems: A review of an air pollution problem. Environ. Pollut. 2010, 158, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Kabelitz, T.; Ammon, C.; Funk, R.; Münch, S.; Biniasch, O.; Nübel, U.; Thiel, N.; Rösler, U.; Siller, P.; Amon, B.; et al. Functional relationship of particulate matter (PM) emissions, animal species, and moisture content during manure application. Environ. Int. 2020, 143, 105577. [Google Scholar] [CrossRef] [PubMed]
- Kabelitz, T.; Biniasch, O.; Ammon, C.; Nübel, U.; Thiel, N.; Janke, D.; Swaminathan, S.; Funk, R.; Münch, S.; Rösler, U.; et al. Particulate matter emissions during field application of poultry manure-The influence of moisture content and treatment. Sci. Total Environ. 2021, 780, 146652. [Google Scholar] [CrossRef]
- Mostafa, E.; Nannen, C.; Henseler, J.; Diekmann, B.; Gates, R.; Buescher, W. Physical properties of particulate matter from animal houses—Empirical studies to improve emission modelling. Environ. Sci. Pollut. Res. 2016, 23, 12253–12263. [Google Scholar] [CrossRef] [PubMed]
- McEachran, A.D.; Blackwell, B.R.; Hanson, J.D.; Wooten, K.J.; Mayer, G.D.; Cox, S.B.; Smith, P.N. Antibiotics, bacteria, and antibiotic resistance genes: Aerial transport from cattle feed yards via particulate matter. Environ. Health Perspect. 2015, 123, 337–343. [Google Scholar] [CrossRef] [Green Version]
- Ferziger, J.H.; Perić, M.; Street, R.L. Computational Methods for Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 2002; Volume 3. [Google Scholar]
- Van Dop, H.; Nieuwstadt, F.; Hunt, J. Random walk models for particle displacements in inhomogeneous unsteady turbulent flows. Phys. Fluids 1985, 28, 1639–1653. [Google Scholar] [CrossRef]
- Nimmatoori, P.; Kumar, A. Dispersion Modeling of Particulate Matter in Different Size Ranges Releasing from a Biosolids Applied Agricultural Field Using Computational Fluid Dynamics. Adv. Chem. Eng. Sci. 2021, 11, 180–202. [Google Scholar] [CrossRef]
- Quinn, A.; Wilson, M.; Reynolds, A.; Couling, S.; Hoxey, R. Modelling the dispersion of aerial pollutants from agricultural buildings—An evaluation of computational fluid dynamics (CFD). Comput. Electron. Agric. 2001, 30, 219–235. [Google Scholar] [CrossRef]
- Wang, M.; Lin, C.H.; Chen, Q. Advanced turbulence models for predicting particle transport in enclosed environments. Build. Environ. 2012, 47, 40–49. [Google Scholar] [CrossRef]
- Blocken, B. LES over RANS in building simulation for outdoor and indoor applications: A foregone conclusion? In Building Simulation; Springer: Berlin/Heidelberg, Germany, 2018; Volume 11, pp. 821–870. [Google Scholar]
- Deetz, K.; Klose, M.; Kirchner, I.; Cubasch, U. Numerical simulation of a dust event in northeastern Germany with a new dust emission scheme in COSMO-ART. Atmos. Environ. 2016, 126, 87–97. [Google Scholar] [CrossRef]
- Vogel, B.; Vogel, H.; Bäumer, D.; Bangert, M.; Lundgren, K.; Rinke, R.; Stanelle, T. The comprehensive model system COSMO-ART–Radiative impact of aerosol on the state of the atmosphere on the regional scale. Atmos. Chem. Phys. 2009, 9, 8661–8680. [Google Scholar] [CrossRef] [Green Version]
- Faust, M.; Wolke, R.; Münch, S.; Funk, R.; Schepanski, K. A new Lagrangian in-time particle simulation module (Itpas v1) for atmospheric particle dispersion. Geosci. Model Dev. 2021, 14, 2205–2220. [Google Scholar] [CrossRef]
- Smagorinsky, J. General circulation experiments with the primitive equations. Mon. Wea. Rev. 1963, 91, 99–164. [Google Scholar] [CrossRef]
- Nicoud, F.; Ducros, F. Subgrid-scale stress modelling based on the square of the velocity gradient tensor. Flow Turbul. Combust. 1999, 62, 183–200. [Google Scholar] [CrossRef]
- Yoshizawa, A.; Horiuti, K. A statistically-derived subgrid-scale kinetic energy model for the large-eddy simulation of turbulent flows. J. Phys. Soc. Jpn. 1985, 54, 2834–2839. [Google Scholar] [CrossRef]
- Yoshizawa, A. Statistical theory for compressible turbulent shear flows, with the application to subgrid modeling. Phys. Fluids 1986, 29, 2152–2164. [Google Scholar] [CrossRef]
- Kim, W.W.; Menon, S. A new dynamic one-equation subgrid-scale model for large eddy simulations. In 33rd Aerospace Sciences Meeting and Exhibit; Aerospace Research Central: Reno, NV, USA, 1995; p. 356. [Google Scholar]
- Dyna, C. Multi-Phase Flows and Discrete Phase Models. Available online: http://www.cfdyna.com/Home/of_multiPhase.html (accessed on 5 September 2021).
- Michaelides, E.E.; Crowe, C.T.; Schwarzkopf, J.D. (Eds.) Multiphase Flow Handbook; Taylor & Francis Inc.: Abingdon, UK, 2016. [Google Scholar]
- Putnam, A. Integrable form of droplet drag coefficient. ARS J. 1961, 31, 1467–1470. [Google Scholar]
- Gidaspow, D. Multiphase Flow and Fluidization: Continuum and Kinetic Theory Descriptions; Academic Press, Inc.: Cambridge, MA, USA, 1994. [Google Scholar]
- Wen, Y.; Yu, Y. Mechanics of fluidization. Chem. Eng. Prog. Symp. Ser. 1966, 162, 100–111. [Google Scholar]
- Cameron, T.; Alexander, Y.; Foss, J. Springer Handbook of Experimental Fluid Mechanics; Springer: Berlin/Heidelberg, Germany, 2007; p. 289. [Google Scholar]
- Elghobashi, S. On predicting particle-laden turbulent flows. Appl. Sci. Res. 1994, 52, 309–329. [Google Scholar] [CrossRef]
- Gromke, C.; Buccolieri, R.; Di Sabatino, S.; Ruck, B. Dispersion study in a street canyon with tree planting by means of wind tunnel and numerical investigations–evaluation of CFD data with experimental data. Atmos. Environ. 2008, 42, 8640–8650. [Google Scholar] [CrossRef]
- De Villiers, E. The Potential of Large Eddy Simulation for the Modeling of Wall Bounded Flows; Imperial College of Science, Technology and Medicine: London, UK, 2006. [Google Scholar]
- Liu, F. A Thorough Description of How Wall Functions Are Implemented in OpenFOAM; Technical Report; Chalmers University of Technology: Gothenburg, Sweden, 2017. [Google Scholar]
- Issa, R.I. Solution of the implicitly discretised fluid flow equations by operator-splitting. J. Comput. Phys. 1986, 62, 40–65. [Google Scholar] [CrossRef]
- Patankar, S.V.; Spalding, D.B. A calculation procedure for heat, mass and momentum transfer in three-dimensional parabolic flows. In Numerical Prediction of Flow, Heat Transfer, Turbulence and Combustion; Elsevier: Amsterdam, The Netherlands, 1983; pp. 54–73. [Google Scholar]
- Holzmann, T. Mathematics, Numerics, Derivations and OpenFOAM®; Holzmann CFD: Augsburg, Germany, 2016; pp. 95–112. [Google Scholar] [CrossRef]
- The OpenFOAM Foundation. OpenFOAM User Guide Version 4.0. 2016. Available online: https://cfd.direct/openfoam/user-guide-v4/ (accessed on 5 September 2021).
- Chen, F.; Simon, C.; Lai, A.C. Modeling particle distribution and deposition in indoor environments with a new drift–flux model. Atmos. Environ. 2006, 40, 357–367. [Google Scholar] [CrossRef]
- Andrews, M.J.; O’Rourke, P.J. The multiphase particle-in-cell (MP-PIC) method for dense particulate flows. Int. J. Multiph. Flow 1996, 22, 379–402. [Google Scholar] [CrossRef]
- Kasper, R.; Turnow, J.; Kornev, N. Numerical modeling and simulation of particulate fouling of structured heat transfer surfaces using a multiphase Euler-Lagrange approach. Int. J. Heat Mass Transf. 2017, 115, 932–945. [Google Scholar] [CrossRef]
- Kasper, R.; Turnow, J.; Kornev, N. Multiphase Eulerian–Lagrangian LES of particulate fouling on structured heat transfer surfaces. Int. J. Heat Fluid Flow 2019, 79, 108462. [Google Scholar] [CrossRef]
- Poletto, R.; Craft, T.; Revell, A. A new divergence free synthetic eddy method for the reproduction of inlet flow conditions for LES. Flow Turbul. Combust. 2013, 91, 519–539. [Google Scholar] [CrossRef]
- Jarrin, N.; Prosser, R.; Uribe, J.C.; Benhamadouche, S.; Laurence, D. Reconstruction of turbulent fluctuations for hybrid RANS/LES simulations using a synthetic-eddy method. Int. J. Heat Fluid Flow 2009, 30, 435–442. [Google Scholar] [CrossRef] [Green Version]
- Bex, C.C.; Pinon, G.; Slama, M.; Gaston, B.; Germain, G.; Rivoalen, E. Lagrangian Vortex computations of turbine wakes: Recent improvements using Poletto’s Synthetic Eddy Method (SEM) to account for ambient turbulence. J. Phys. Conf. Ser. 2020, 1618, 062028. [Google Scholar] [CrossRef]
- Saha, C.K.; Yi, Q.; Janke, D.; Hempel, S.; Amon, B.; Amon, T. Opening Size Effects on Airflow Pattern and Airflow Rate of a Naturally Ventilated Dairy Building—A CFD Study. Appl. Sci. 2020, 10, 6054. [Google Scholar] [CrossRef]
- Janke, D.; Yi, Q.; Thormann, L.; Hempel, S.; Amon, B.; Nosek, Š.; Van Overbeke, P.; Amon, T. Direct Measurements of the Volume Flow Rate and Emissions in a Large Naturally Ventilated Building. Sensors 2020, 20, 6223. [Google Scholar] [CrossRef]
- VDI. Environmental Meteorology-Physical Modelling of Flow and Dispersion Processes in the Atmospheric Boundary Layer-Application of Wind Tunnels; Guideline; Verein Deutscher Ingenieure: Duesseldorf, Germany, 2000. [Google Scholar]
- Janke, D.; Swaminathan, S.; Hempel, S.; Kasper, R.; Amon, T. Sample Case Files for the Particulate Matter Dispersion Modeling in Agricultural Applications. 2021. Available online: https://github.com/ssacfd/ATB_particletransport (accessed on 5 September 2021).
- Lin, J.J.; Noll, K.E.; Holsen, T.M. Dry deposition velocities as a function of particle size in the ambient atmosphere. Aerosol Sci. Technol. 1994, 20, 239–252. [Google Scholar] [CrossRef] [Green Version]
- United States Environmental Protection Agency. Air Quality Guide for Particle Pollution. 2015. Available online: https://www.airnow.gov/publications/air-quality-index/air-quality-guide-for-particle-pollution/ (accessed on 5 September 2021).
- Janke, D.; Caiazzo, A.; Ahmed, N.; Alia, N.; Knoth, O.; Moreau, B.; Wilbrandt, U.; Willink, D.; Amon, T.; John, V. On the feasibility of using open source solvers for the simulation of a turbulent air flow in a dairy barn. Comput. Electron. Agric. 2020, 175, 105546. [Google Scholar] [CrossRef]
- Nozawa, K.; Tamura, T. Simulation of rough-wall turbulent boundary layer for LES inflow data. In Second Symposium on Turbulence and Shear Flow Phenomena; Begel House Inc.: Danbury, CT, USA, 2001. [Google Scholar]
- Nozawa, K.; Tamura, T. Large eddy simulation of the flow around a low-rise building immersed in a rough-wall turbulent boundary layer. J. Wind Eng. Ind. Aerodyn. 2002, 90, 1151–1162. [Google Scholar] [CrossRef]
- Lund, T.S.; Wu, X.; Squires, K.D. Generation of turbulent inflow data for spatially-developing boundary layer simulations. J. Comput. Phys. 1998, 140, 233–258. [Google Scholar] [CrossRef] [Green Version]
- Esmen, N.A.; Corn, M. Residence time of particles in urban air. Atmos. Environ. (1967) 1971, 5, 571–578. [Google Scholar] [CrossRef]
- Sehmel, G.A. Particle eddy diffusivities and deposition velocities for isothermal flow and smooth surfaces. Aerosol Sci. 1973, 4, 125–138. [Google Scholar] [CrossRef]
- Van Buggenhout, S.; Van Brecht, A.; Özcan, S.E.; Vranken, E.; Van Malcot, W.; Berckmans, D. Influence of sampling positions on accuracy of tracer gas measurements in ventilated spaces. Biosyst. Eng. 2009, 104, 216–223. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fine | Medium | Coarse | |
|---|---|---|---|
| Min | 0.44 | 0.71 | 1.42 |
| Max | 61.80 | 79.76 | 167.71 |
| Avg | 10.94 | 13.04 | 25.28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Janke, D.; Swaminathan, S.; Hempel, S.; Kasper, R.; Amon, T. Particulate Matter Dispersion Modeling in Agricultural Applications: Investigation of a Transient Open Source Solver. Agronomy 2021, 11, 2246. https://doi.org/10.3390/agronomy11112246
Janke D, Swaminathan S, Hempel S, Kasper R, Amon T. Particulate Matter Dispersion Modeling in Agricultural Applications: Investigation of a Transient Open Source Solver. Agronomy. 2021; 11(11):2246. https://doi.org/10.3390/agronomy11112246
Chicago/Turabian StyleJanke, David, Senthilathiban Swaminathan, Sabrina Hempel, Robert Kasper, and Thomas Amon. 2021. "Particulate Matter Dispersion Modeling in Agricultural Applications: Investigation of a Transient Open Source Solver" Agronomy 11, no. 11: 2246. https://doi.org/10.3390/agronomy11112246
APA StyleJanke, D., Swaminathan, S., Hempel, S., Kasper, R., & Amon, T. (2021). Particulate Matter Dispersion Modeling in Agricultural Applications: Investigation of a Transient Open Source Solver. Agronomy, 11(11), 2246. https://doi.org/10.3390/agronomy11112246