
Robotic Mowing of Tall Fescue at 90 mm Cutting Height: Random Trajectories vs. Systematic Trajectories

 ,
, 

 ,
,  , ,
, , 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Layout
2.2. Assessments
2.3. Statistical Analysis
3. Results
4. Discussion
4.1. Autonomous Mowers’ Operating Patterns
4.2. Turfgrass Parameters
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Balogh, J.C.; Walker, W.J. Golf Course Management & Construction: Environmental Issues; CRC Press: Boca Raton, FL, USA, 1992; pp. 1–39. [Google Scholar]
- Yue, C.; Wang, J.; Watkins, E.; Bonos, S.A.; Nelson, K.C.; Murphy, J.A.; Meyer, W.A.; Horgan, B.P. Heterogeneous Consumer Preferences for Turfgrass Attributes in the United States and Canada. Can. J. Agric. Econ. Revue Can. D’agroecon. 2017, 65, 347–383. [Google Scholar] [CrossRef]
- Volterrani, M.; Magni, S. Species and growing media for sports turfs in Mediterranean area. Acta Hortic. 2004, 661, 359–364. [Google Scholar] [CrossRef]
- Schiavon, M.; Barnes, B.D.; Shaw, D.A.; Henry, J.M.; Baird, J.H. Strategies for converting tall fescue to warm-season turf in a Mediterranean climate. HortTechnology 2013, 23, 442–448. [Google Scholar] [CrossRef] [Green Version]
- Christians, N.E.; Patton, A.J.; Law, D.L. Foundamentals of Turfgrass Management, 5th ed.; John Wiley & Sons: New York, NY, USA, 2017. [Google Scholar]
- Park, B.S.; Lawson, T.J.; Samaranayake, H.; Murphy, J.A. Tolerance and recovery of Kentucky bluegrass subjected to seasonal wear. Crop Sci. 2010, 50, 1526–1536. [Google Scholar] [CrossRef]
- Schiavon, M.; Leinauer, B.; Serena, M.; Sallenave, R.; Maier, B. Establishing tall fescue and Kentucky bluegrass using subsurface irrigation and saline water. Agron. J. 2013, 105, 183–190. [Google Scholar] [CrossRef] [Green Version]
- Schiavon, M.; Green, R.L.; Baird, J.H. Drought tolerance of cool-season turfgrasses in a Mediterranean climate. Eur. J. Hort. Sci. 2014, 79, 175–182. [Google Scholar]
- Pornaro, C.; Barolo, E.; Rimi, F.; Macolino, S.; Richardson, M. Performance of various cool-season turfgrasses as influenced by simulated traffic in northeastern Italy. Eur. J. Hort. Sci. 2016, 81, 27–36. [Google Scholar] [CrossRef]
- Schiavon, M.; Pornaro, C.; Macolino, S. Tall Fescue (Schedonorus arundinaceus (Schreb.) Dumort.) Turfgrass Cultivars Perfor- mance under Reduced N Fertilization. Agronomy 2021, 11, 193. [Google Scholar] [CrossRef]
- Burns, R.E. Time of fertilizer application as it affects quality of tall fescue turf. In Proceedings of the 4th International Turfgrass Research Conference, Guelph, ON, Canada, 19–23 July 1981; Sheard, R.W., Ed.; University of Guelph: Guelph, ON, Canada, 1981; pp. 285–291. [Google Scholar]
- Pirchio, M.; Fontanelli, M.; Frasconi, C.; Martelloni, L.; Raffaelli, M.; Peruzzi, A.; Gaetani, M.; Magni, S.; Caturegli, L.; Volterrani, M.; et al. Autonomous Mower vs. Rotary Mower: Effects on Turf Quality and Weed Control in Tall Fescue Lawn. Agronomy 2018, 8, 15. [Google Scholar] [CrossRef] [Green Version]
- Volterrani, M.; Minelli, A.; Gaetani, M.; Grossi, N.; Magni, S.; Caturegli, L. Reflectance, absorbance and transmittance spectra of bermudagrass and manilagrass turfgrass canopies. PLoS ONE 2017, 12, e0188080. [Google Scholar] [CrossRef] [Green Version]
- Dernoeden, P.H.; Carroll, M.J.; Krouse, J.M. Weed management and tall fescue quality as influenced by mowing, nitrogen, and herbicides. Crop Sci. 1993, 33, 1055–1061. [Google Scholar] [CrossRef]
- Grossi, N.; Volterrani, M.; Magni, S.; Miele, S. Tall fescue turf quality and soccer playing characteristics as affected by mowing height. Acta Hortic. 2004, 661, 319–322. [Google Scholar] [CrossRef]
- Report Buyer. Robotic Lawn Mower Market–Global Outlook and Forecast 2018–2023. Available online: https://www.reportbuyer.com/product/5398687/robotic-lawn-mower-market-global-outlook-and-forecast-2018-2023.html (accessed on 19 June 2021).
- Hicks, R.W.; Hall, E.L. Survey of robot lawn mowers. In Proceedings SPIE 4197, Intelligent Robots and Computer Vision XIX: Algorithms, Techniques, and Active Vision; Society of Photo-Optical Instrumentation Engineers (SPIE): Boston, MA, USA, 2000; pp. 262–269. [Google Scholar]
- Nelson, R.G. Automated Lawn Mower. U.S. Patent 5,974,347, 26 October 1999. [Google Scholar]
- Husqvarna. Husqvarna Automower 450XH. Available online: https://www.husqvarna.com/us/robotic-lawn-mowers/automower-450xh/ (accessed on 19 June 2021).
- Heckman, J.R.; Liu, H.; Hill, W.; DeMilia, M.; Anastasia, W.L. Kentucky Bluegrass Responses to Mowing Practice and Nitrogen Fertility Management. J. Sustain. Agric. 2000, 15, 25–33. [Google Scholar] [CrossRef]
- Brede, D. Turfgrass Maintenance Reduction Handbook: Sports, Lawns, and Golf, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2000; p. 392. [Google Scholar]
- Grossi, N.; Fontanelli, M.; Garramone, E.; Peruzzi, A.; Raffaelli, M.; Pirchio, M.; Martelloni, L.; Frasconi, C.; Caturegli, L.; Gaetani, M.; et al. Autonomous Mower Saves Energy and Improves Quality of Tall Fescue Lawn. HortTechnology 2016, 26, 825–830. [Google Scholar] [CrossRef] [Green Version]
- Martelloni, L.; Fontanelli, M.; Pieri, S.; Frasconi, C.; Caturegli, L.; Gaetani, M.; Grossi, N.; Magni, S.; Pirchio, M.; Raffaelli, M.; et al. Assessment of the Cutting Performance of a Robot Mower Using Custom Built Software. Agronomy 2019, 9, 230. [Google Scholar] [CrossRef] [Green Version]
- Husqvarna. Husqvarna Automower 105/310/315/320/330X/420/430X/450X Operator’s Manual. Available online: http://www.husqvarna.com/uk/support/manuals-downloads/ (accessed on 19 June 2021).
- Zucchetti. Ambrogio Robot. Available online: http://www.ambrogiorobot.com/en/ambrogiorobot (accessed on 19 June 2021).
- Emlid. A Reach RTK Docs. Specification. Available online: https://docs.emlid.com/reach/specs/ (accessed on 19 June 2021).
- Takasu, T. RTKLIB Ver. 2.4.2 Manual. Available online: http://www.rtklib.com/prog/manual_2.4.2.pdf (accessed on 19 June 2021).
- Sportelli, M.; Pirchio, M.; Fontanelli, M.; Volterrani, M.; Frasconi, C.; Martelloni, L.; Caturegli, L.; Gaetani, M.; Grossi, N.; Magni, S.; et al. Autonomous Mowers Working in Narrow Spaces: A Possible Future Application in Agriculture? Agronomy 2020, 10, 553. [Google Scholar] [CrossRef] [Green Version]
- Hoepli, Manuali Hoepli. It. Available online: http://www.manualihoepli.it/media/doc/pr243.pdf (accessed on 19 June 2021).
- Krans, J.V.; Morris, K. Determining a profile of protocols and standards used in the visual field assessment of turfgrasses: A 290 survey of national turfgrass evaluation program-sponsored university scientists. Ap. Turfgrass Sci. 2007, 4, 1–6. [Google Scholar] [CrossRef] [Green Version]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2016; Available online: https://www.R-project.org/ (accessed on 19 June 2021).
- Gerhard, D.; Ritz, C. Medrc: Mixed Effect Dose-Response Curves. R Package, Version 1.1-0. Available online: https://rdrr.io/github/DoseResponse/medrc/man/metadrm.html (accessed on 19 June 2021).
- Ritz, C. Asymptotic regression model. In Analysis of Dose-Response Curves; Ritz, C., Strebig, J.C., The Comprehensive R Archive Network, Eds.; 2016; pp. 7–8. Available online: https://cran.r-project.org/web/packages/drc/drc.pdf (accessed on 19 June 2021).
- Wang, J.; Chen, J.; Cheng, S.; Xie, Y. Double heuristic optimization based on hierarchical partitioning for coverage path planning of robot mowers. In Proceedings of the 12th International Conference on Computational Intelligence and Security (CIS), Wuxi, China, 16–19 December 2016; pp. 186–189. [Google Scholar]
- Bosse, M.; Nourani-Vatani, N.; Roberts, J. Coverage Algorithms for an Under-actuated Car-Like Vehicle in an Uncertain Environment. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 698–703. [Google Scholar]
- Tanaji, S.V.; Chandrakant, C.S.; Shashikant, P.S.; Raju, G.O.; Bhalchandra, G.S. Automated mower robo. Int. Res. J. Eng. Technol. 2018, 5, 1–4. [Google Scholar]
- Sportelli, M.; Martelloni, L.; Orlandi, A.; Pirchio, M.; Fontanelli, M.; Frasconi, C.; Raffaelli, M.; Peruzzi, A.; Consorti, S.B.; Vernieri, P. Autonomous Mower Management Systems Efficiency Improvement: Analysis of Greenspace Features and Planning Suggestions. Agriculture 2019, 9, 115. [Google Scholar] [CrossRef] [Green Version]
- Kang, C.Q.; Ng, P.K.; Liew, K.W. The Conceptual Synthesis and Development of a Multifunctional Lawnmower. Inventions 2021, 6, 38. [Google Scholar] [CrossRef]
- Pirchio, M.; Fontanelli, M.; Labanca, F.; Sportelli, M.; Frasconi, C.; Martelloni, L.; Raffaelli, M.; Peruzzi, A.; Gaetani, M.; Magni, S.; et al. Energetic Aspects of Turfgrass Mowing: Comparison of Different Rotary Mowing Systems. Agriculture 2019, 9, 178. [Google Scholar] [CrossRef] [Green Version]
- Magni, S.; Sportelli, M.; Grossi, N.; Volterrani, M.; Minelli, A.; Pirchio, M.; Fontanelli, M.; Frasconi, C.; Gaetani, M.; Martelloni, L.; et al. Autonomous Mowing and Turf-Type Bermudagrass as Innovations for an Environment-Friendly Floor Management of a Vineyard in Coastal Tuscany. Agriculture 2020, 10, 189. [Google Scholar] [CrossRef]
- Hubbard, S.; Baxmeyer, A.; Hubbard, B. Case Study of an Automated Mower to Support Airport Sustainability. Sustainability 2021, 13, 8867. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations. Part 2: Operations and systems. Biosyst. Eng. 2017, 153, 110–128. [Google Scholar] [CrossRef]
- Carrow, R.N. Influence of Soil Compaction on Three Turfgrass Species. Agron. J. 1980, 72, 1038. [Google Scholar] [CrossRef]
- Miele, S.; Volterrani, M.; Magni, S.; Gaetani, K. Winter quality of tall fescue turf: Effects of renovation technique and nitrogen fertilization. Ital. J. Agron. 2002, 6, 97–101. [Google Scholar]
- Sun, D.; Liddle, M.J. Trampling resistance, stem flexibility and leaf strength in nine Australian grasses and herbs. Biol. Conserv. 1993, 65, 35–41. [Google Scholar] [CrossRef]
- Hale, T.C.; Reinert, J.A.; White, R.H. Resistance of zoysiagrass (Zoysia spp.) to fall armyworm (lepidoptera: Noctuidae): Leaf tensile strength and cell wall components. Int. Turfgrass Soc. Res. J. 2009, 11, 639–648. [Google Scholar]
- Magni, S.; Pompeiano, A.; Gaetani, M.; Caturegli, L.; Grossi, N.; Minelli, A.; Volterrani, M. Zoysiagrass (Zoysia spp. Willd.) for European lawns: A review. Ital. J. Agron. 2017, 12. [Google Scholar] [CrossRef] [Green Version]
- Sportelli, M.; Frasconi, C.; Fontanelli, M.; Pirchio, M.; Raffaelli, M.; Magni, S.; Caturegli, L.; Volterrani, M.; Mainardi, M.; Peruzzi, A. Autonomous Mowing and Complete Floor Cover for Weed Control in Vineyards. Agronomy 2021, 11, 538. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Working Width (mm) | Mowing Height (mm) | Trial | Managed Area (m2) | Mowing Pattern | Working Time (min) |
|---|---|---|---|---|---|
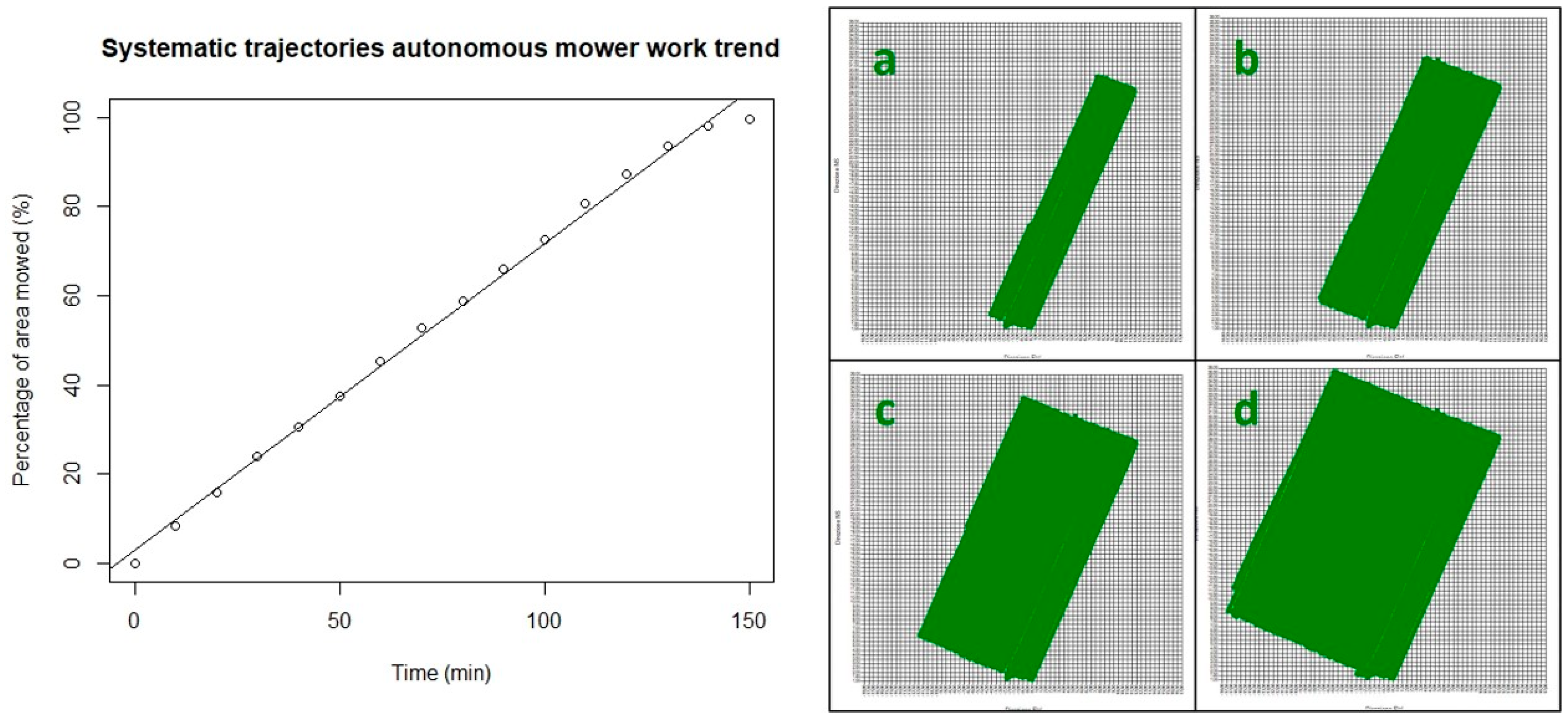
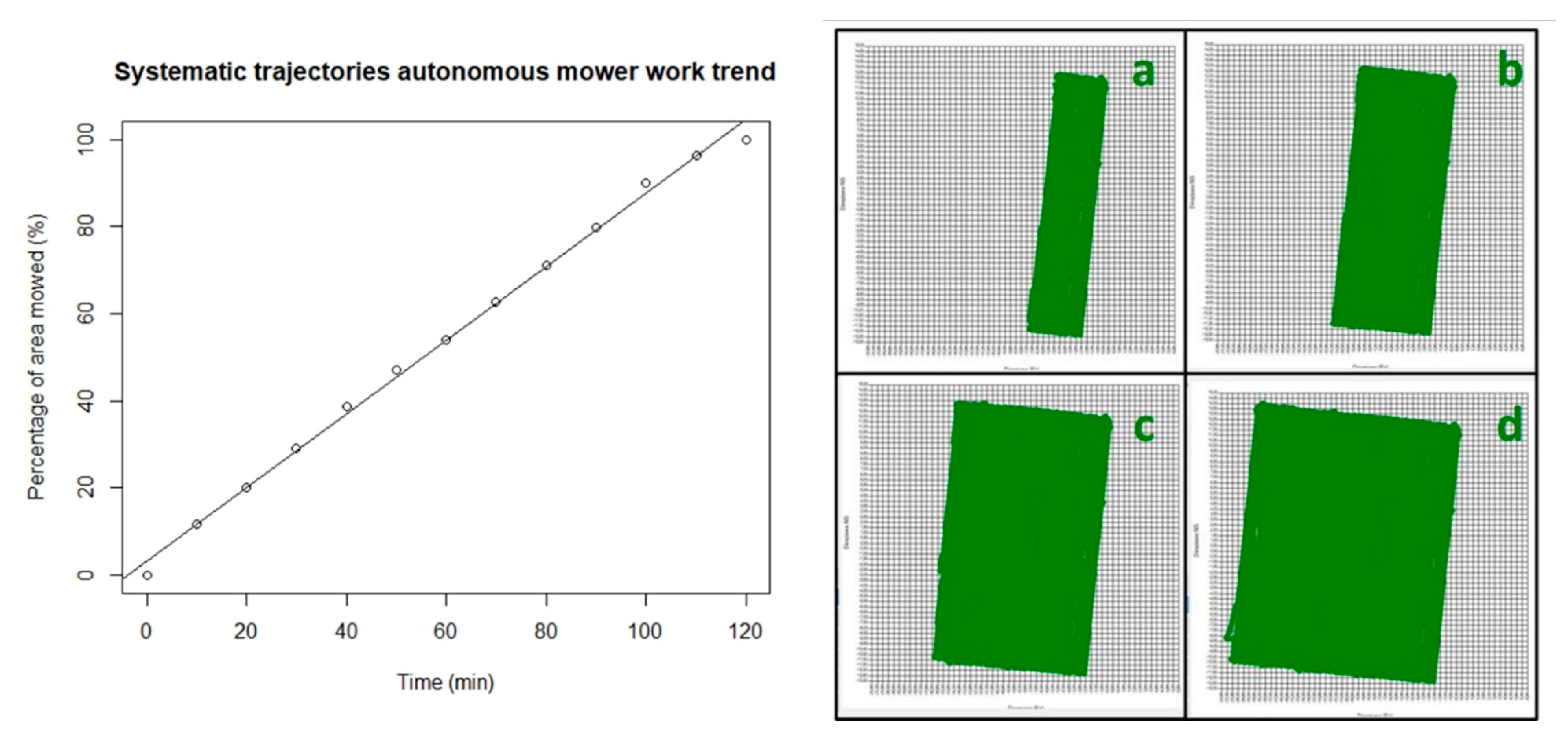
| 240 | 90 | 1 | 600 m2 | Systematic trajectories | 150 |
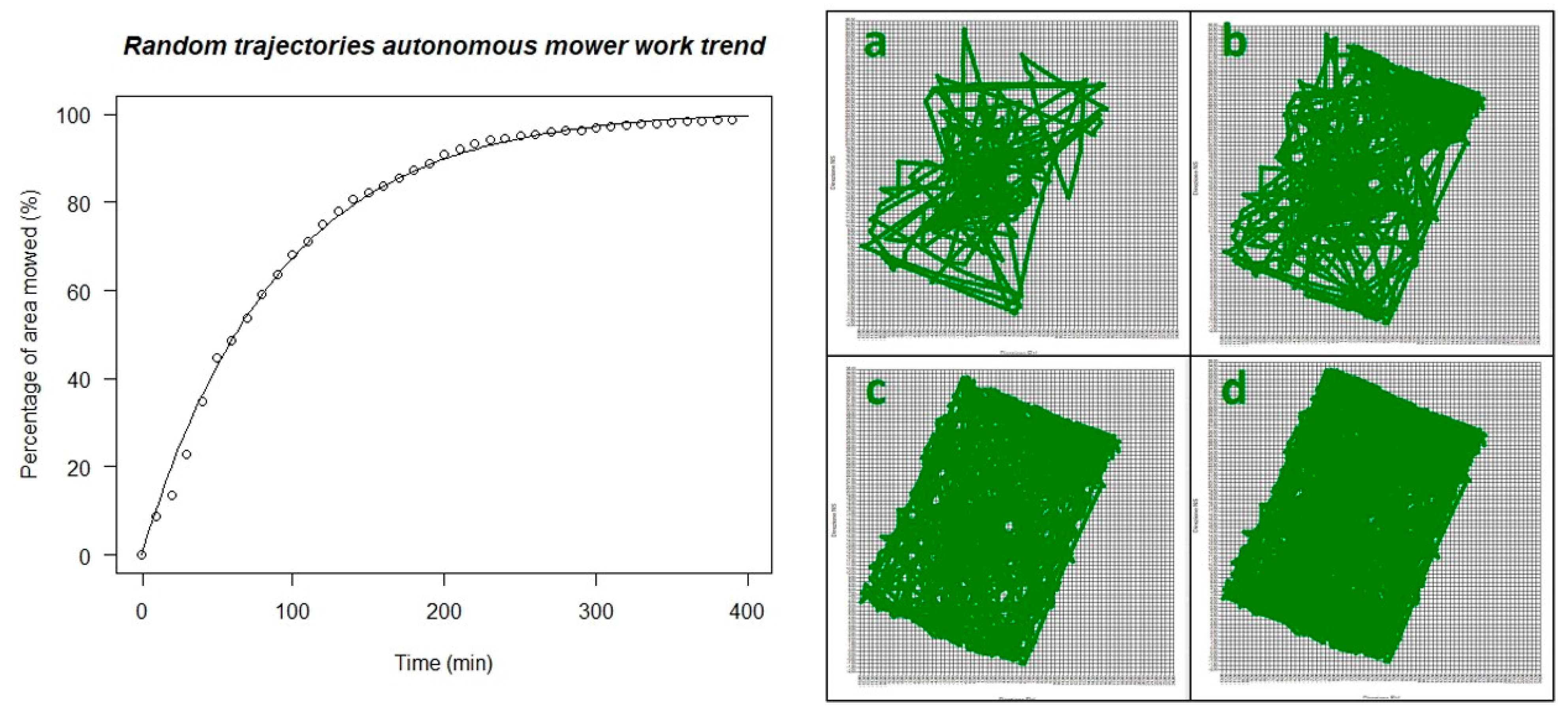
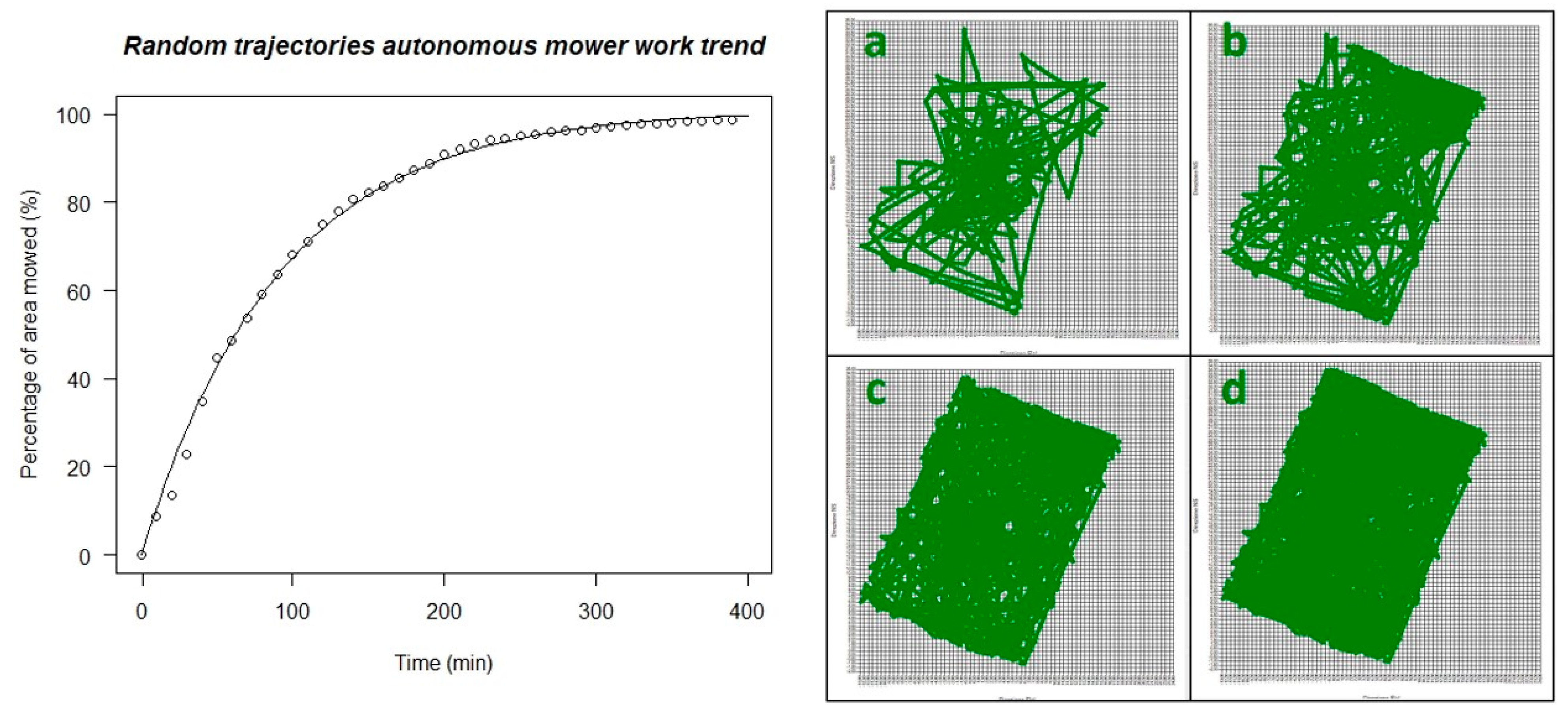
| Random trajectories | 390 | ||||
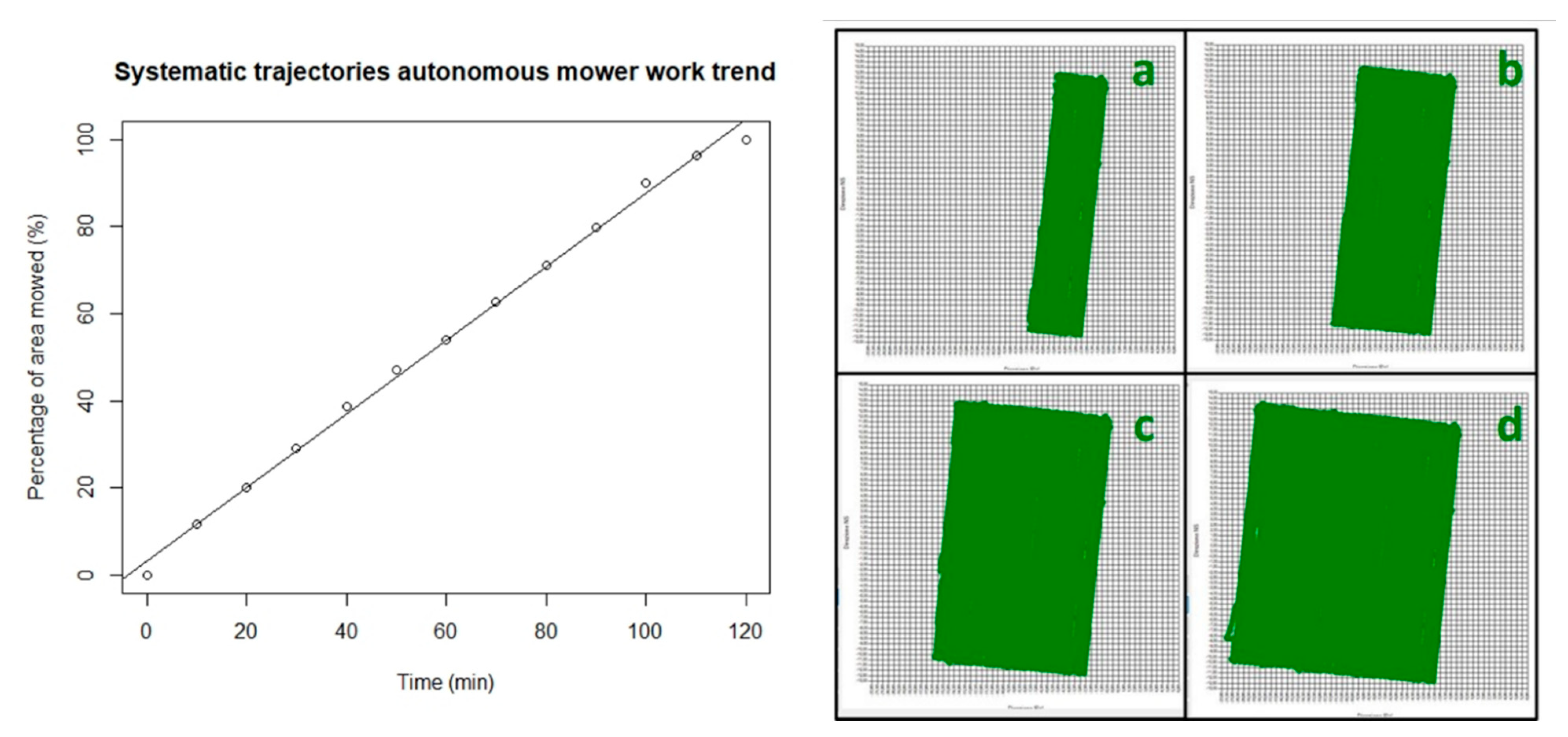
| 2 | 500 m2 | Systematic trajectories | 120 | ||
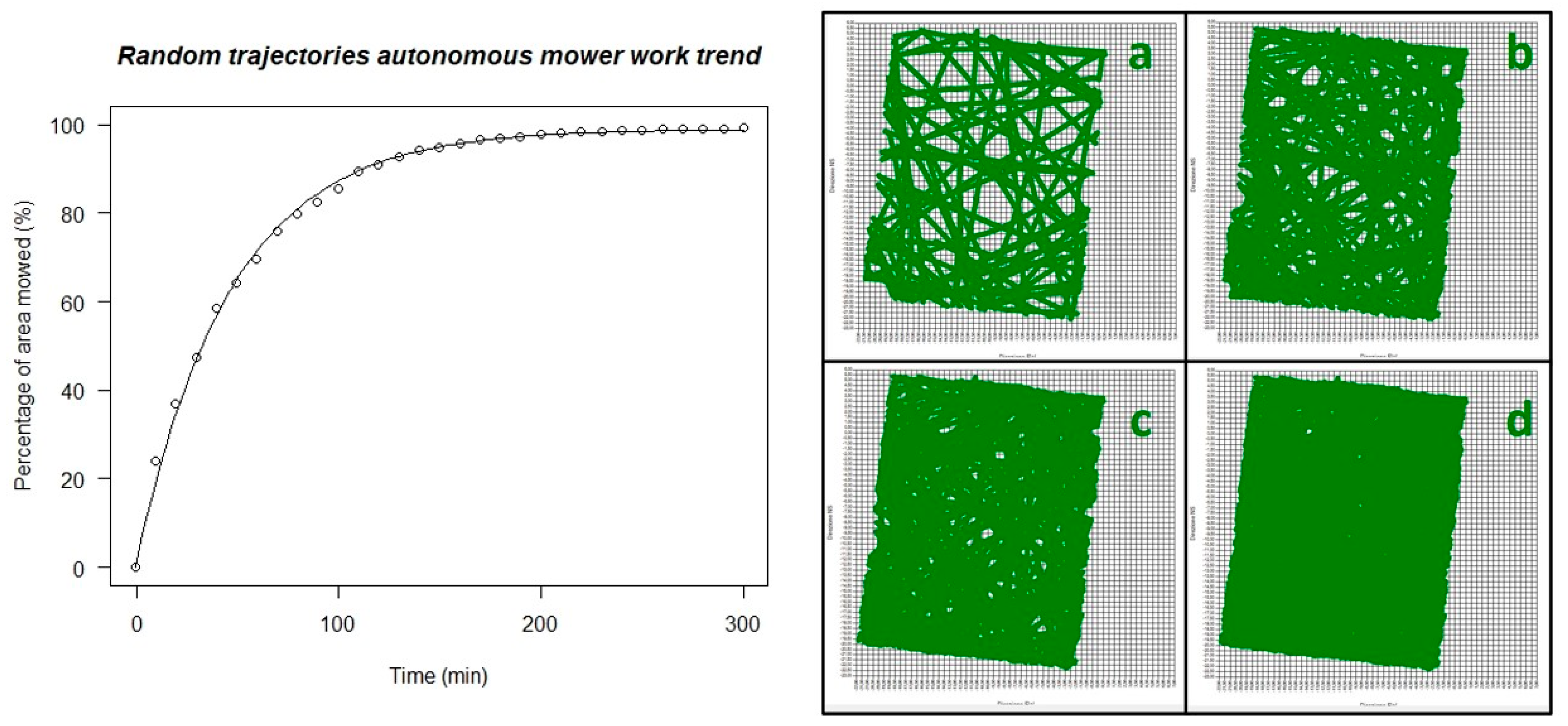
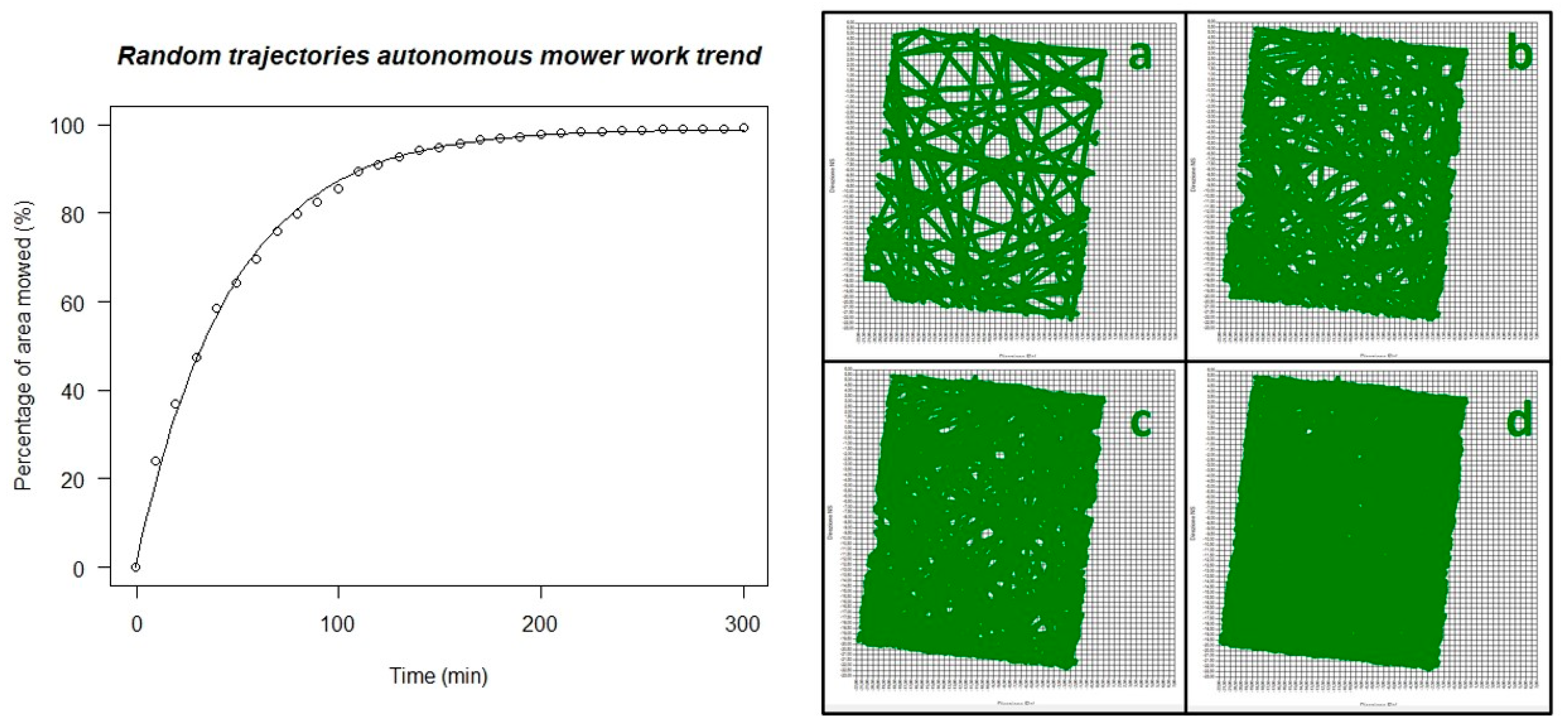
| Random trajectories | 300 |
| Source | Trial | Percentage of Area Mowed (%) | Actual Mowed Area (m2) | Distance Travelled (m) | Theoretical Mowed Area (m2) | Efficiency | Turf Quality | Wheel Marks | Turf Height (mm) |
|---|---|---|---|---|---|---|---|---|---|
| Mowing pattern | 1 | ns | ns | *** | *** | *** | * | *** | ns |
| 2 | ns | ns | *** | *** | *** | ns | * | ns |
| Trial | Mowing Pattern | Percentage of Area Mowed (%) | Actual Mowed Area (m2) | Distance Travelled (m) | Theoretical Mowed area (m2) | Work Efficiency |
|---|---|---|---|---|---|---|
| 1 | Systematic Trajectories 1 | 99.61 | 597.66 | 3142.16 | 754.12 | 0.79 |
| Random trajectories 2 | 98.68 | 592.06 | 6960.35 | 1670.48 | 0.35 | |
| 2 | Systematic Trajectories 3 | 99.79 | 498.95 | 2406.95 | 577.67 | 0.86 |
| Random trajectories 4 | 99.26 | 496.30 | 6541.45 | 1569.95 | 0.32 |
| Trial | Mowing Pattern | Quality | Wheel Marks | Actual Turf Height (mm) |
|---|---|---|---|---|
| 1 | Systematic Trajectories | 6.9 | 6.8 | 108 |
| Random trajectories | 6.1 | 1.3 | 105 | |
| 2 | Systematic Trajectories | 8.1 | 6.4 | 94 |
| Random trajectories | 8.1 | 3.9 | 90 |
| Parameter | Unit | Systematic Trajectories | Random Trajectories |
|---|---|---|---|
| Hourly electric energy consumption * | kWh h−1 | 0.12 | 0.08 |
| Estimated work capacity | h ha−1 | 40 | 83 |
| Electric energy consumption per hectare | kWh ha−1 | 4.75 | 6.63 |
| Electric energy consumption per year | kWh year−1 ha−1 | 684.00 | 954.72 |
| Primary energy consumption | kWh year−1 | 1252.75 | 1748.57 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sportelli, M.; Fontanelli, M.; Pirchio, M.; Frasconi, C.; Raffaelli, M.; Caturegli, L.; Magni, S.; Volterrani, M.; Peruzzi, A. Robotic Mowing of Tall Fescue at 90 mm Cutting Height: Random Trajectories vs. Systematic Trajectories. Agronomy 2021, 11, 2567. https://doi.org/10.3390/agronomy11122567
Sportelli M, Fontanelli M, Pirchio M, Frasconi C, Raffaelli M, Caturegli L, Magni S, Volterrani M, Peruzzi A. Robotic Mowing of Tall Fescue at 90 mm Cutting Height: Random Trajectories vs. Systematic Trajectories. Agronomy. 2021; 11(12):2567. https://doi.org/10.3390/agronomy11122567
Chicago/Turabian StyleSportelli, Mino, Marco Fontanelli, Michel Pirchio, Christian Frasconi, Michele Raffaelli, Lisa Caturegli, Simone Magni, Marco Volterrani, and Andrea Peruzzi. 2021. "Robotic Mowing of Tall Fescue at 90 mm Cutting Height: Random Trajectories vs. Systematic Trajectories" Agronomy 11, no. 12: 2567. https://doi.org/10.3390/agronomy11122567
APA StyleSportelli, M., Fontanelli, M., Pirchio, M., Frasconi, C., Raffaelli, M., Caturegli, L., Magni, S., Volterrani, M., & Peruzzi, A. (2021). Robotic Mowing of Tall Fescue at 90 mm Cutting Height: Random Trajectories vs. Systematic Trajectories. Agronomy, 11(12), 2567. https://doi.org/10.3390/agronomy11122567