Unmanned Aerial Vehicles in Agriculture: A Survey



Abstract
:1. Introduction
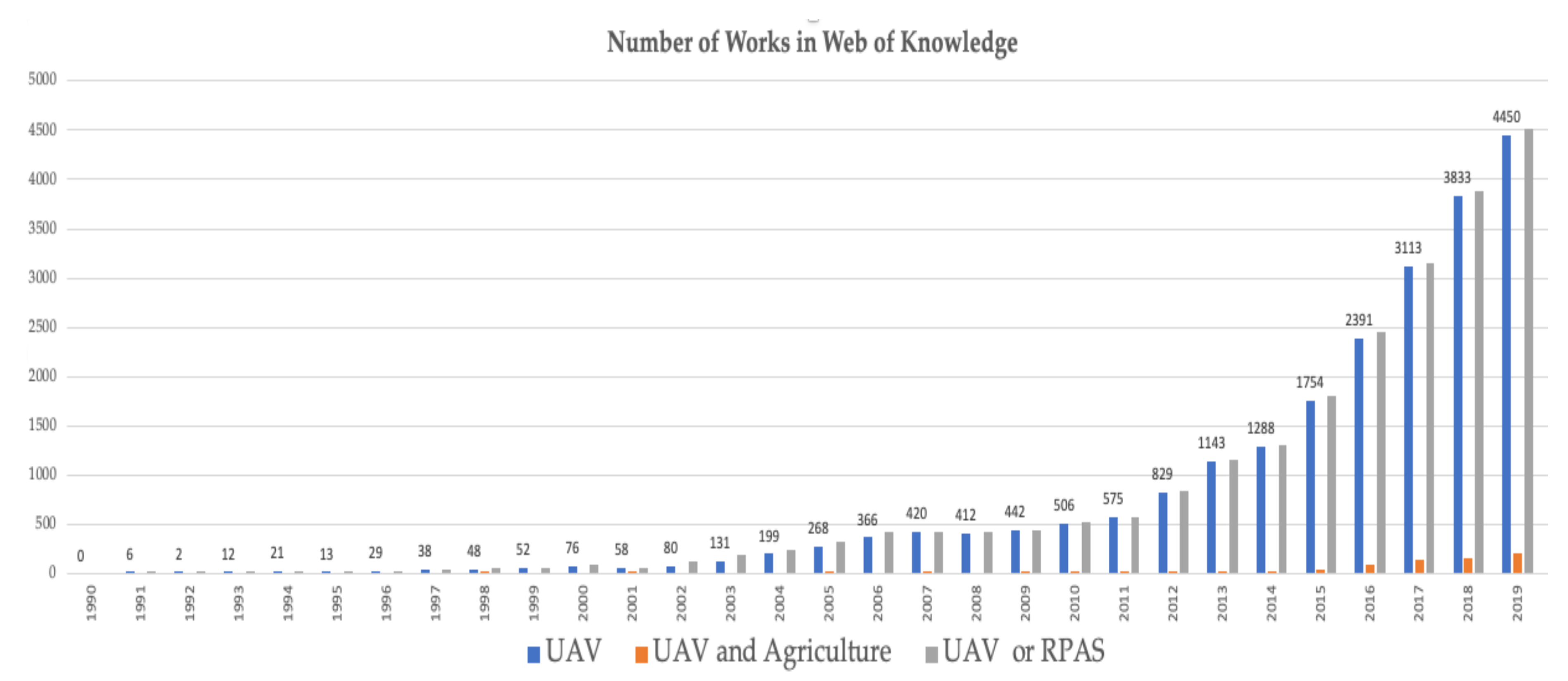
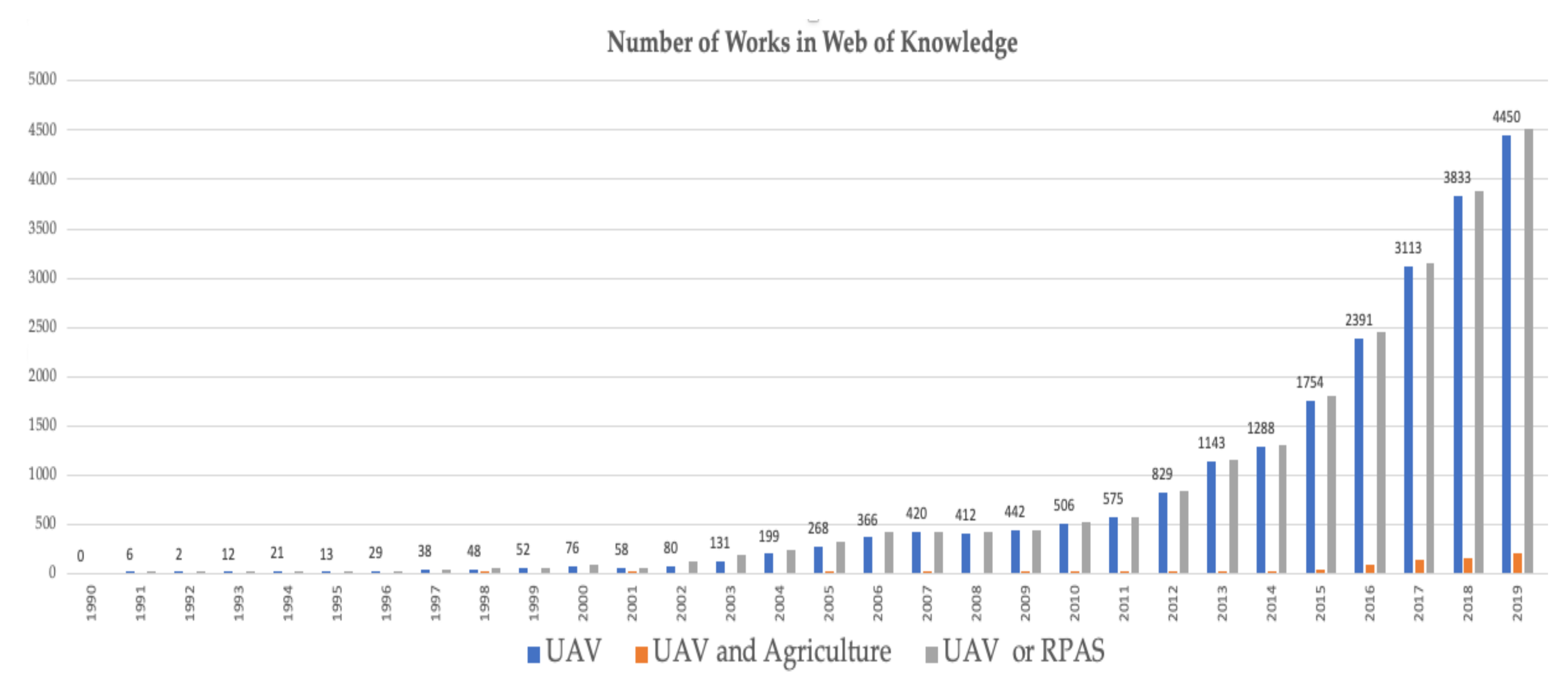
2. Historical Background and Trends in Agricultural Aviation
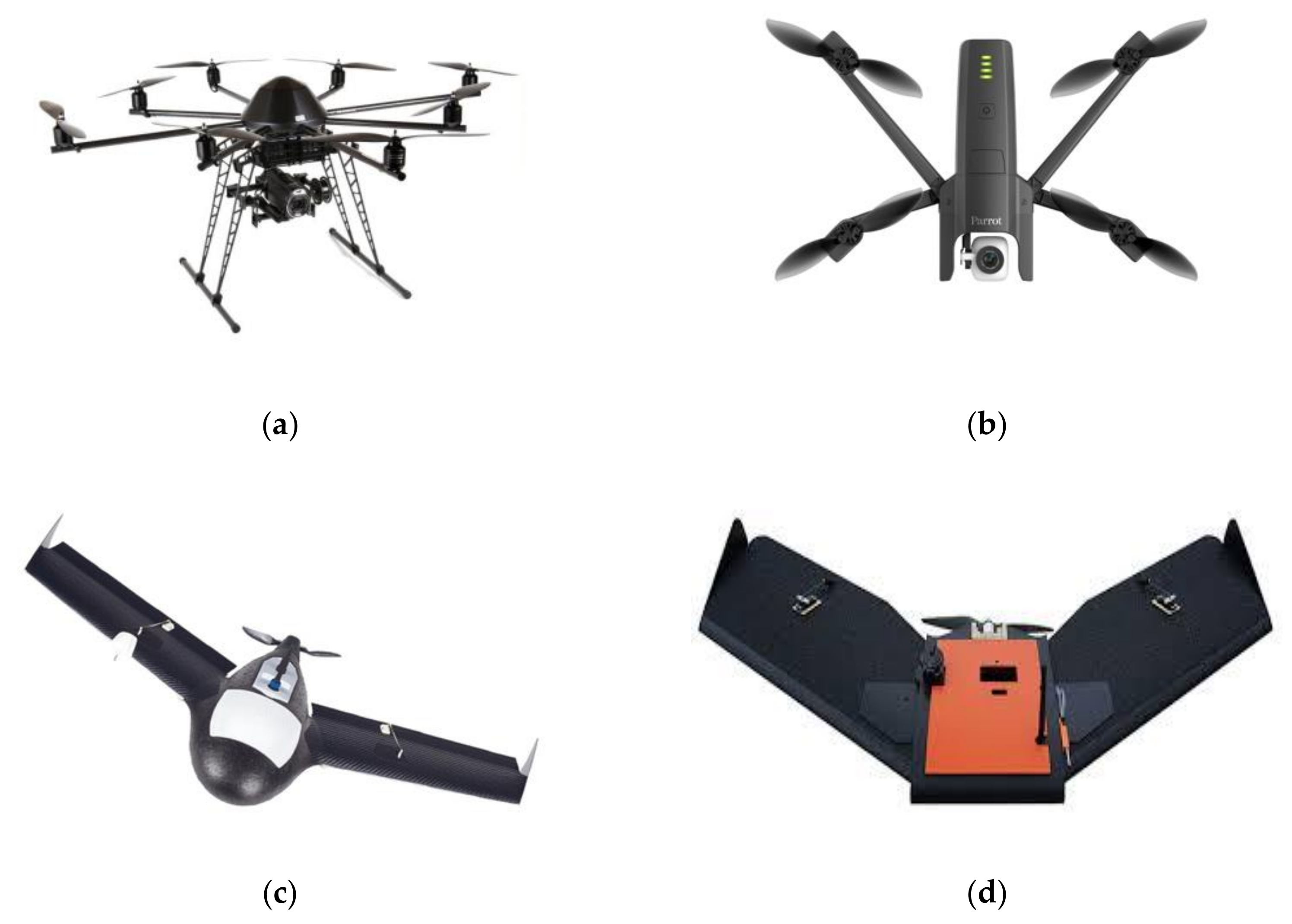
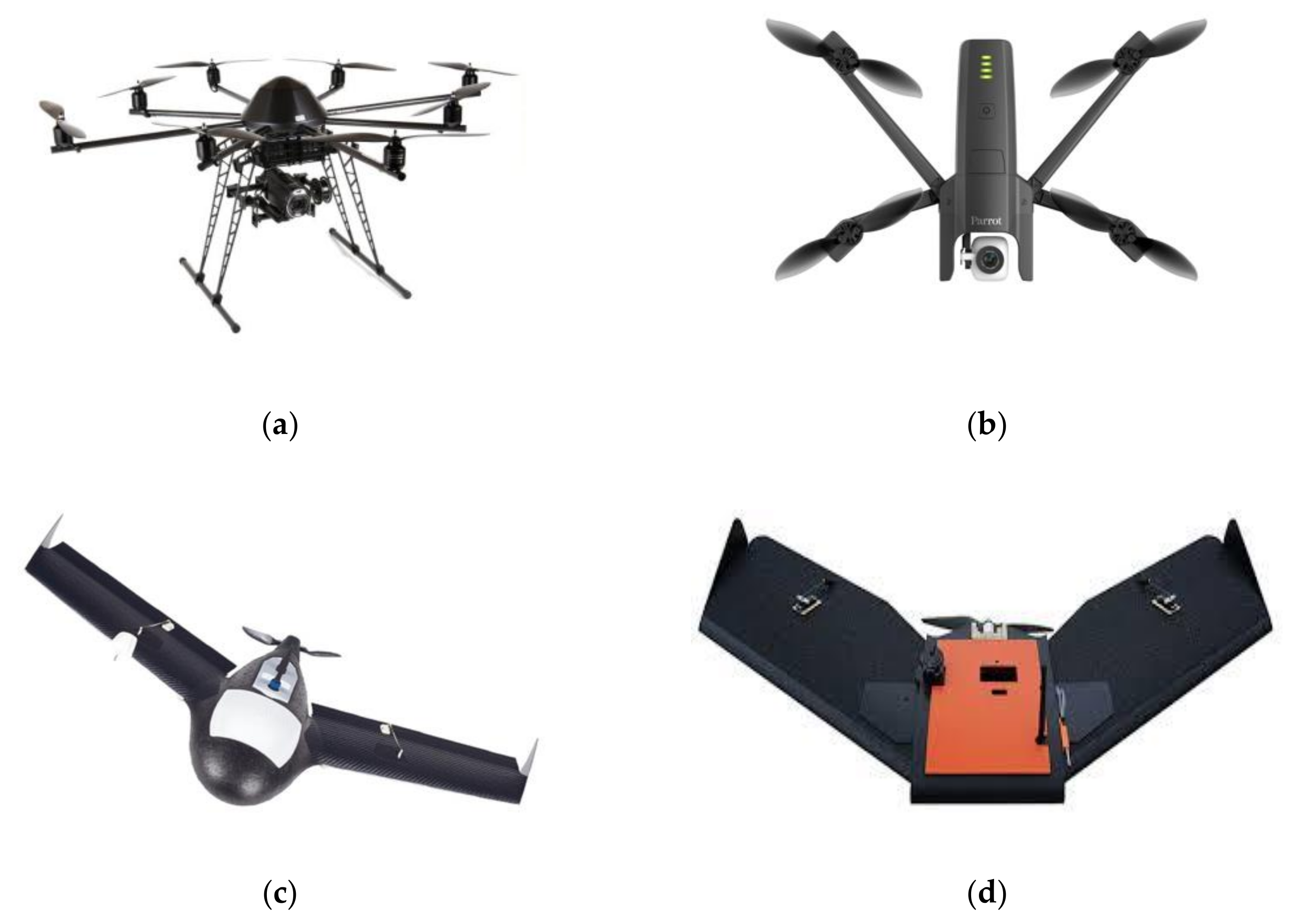
3. UAV Classification
3.1. According to the Type of Wing
3.2. According to the Autonomy Level
- Waypoint trajectory. A flight plan is created taking pictures and videos at the waypoints.
- Mapping mission. An area is covered and a 2D map or image is created by using mosaicking procedures.
- Oblique mission: Several flights are performed with different points of view in order to create a 3D model of the target.
- Corridor mission: The flight plan is along a target (river, aerial power line, railway line, among others).
4. Unmanned Aerial Systems Used in Agriculture
4.1. Aerial Vehicles
4.2. Sensors
5. Agronomic Applications of the UAV
5.1. Remote Sensing
5.1.1. Nutrients Evaluation and Health Assessment
5.1.2. Water Stress Analysis
5.1.3. Yield and Biomass Estimate
5.1.4. Soil Monitoring
5.1.5. Weeds Detection
5.1.6. Environmental Monitoring
5.2. Aerial Spraying
6. UAV Flying Regulation for Agricultural Tasks
- Open category shall not be subject to any prior operational authorization, nor to an operational declaration by the UAS operator.
- Specific category, which requires an authorization by the competent authority prior to the operation that includes an operational risk assessment report, except for certain standard scenarios where a declaration by the operator is sufficient or when the operator holds a light UAS operator certificate (LUC) with the appropriate privileges.
- Certified, which requires the certification of the UAS, a licensed remote pilot and an operator approved by the competent authority.
7. Conclusions
- UAVs require neither a dedicated airport nor a navigation station, and usually can land on the edge of cultivated lands. This also reduces the no-load flight rate in spraying tasks.
- High maneuverability: Although this feature is intrinsic to rotary wing aircrafts, the fixed-wing ones also show short turning radius, high rate of climbing and a good performance during super low flights.
- They are suitable for working in rough terrain and small plots with high efficiency.
- They exhibit lower operational costs due to their reduced flight crew requirements, low labor intensity, and simple maintenance in comparison to traditional manned aircrafts.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Association for Unmanned Vehicle Systems International—AUVSI. Available online: www.auvsi.org (accessed on 11 October 2020).
- Commercial Drone Market Size, Share & Trends Analysis Report By Application (Filming & Photography, Inspection & Maintenance), by Product (Fixed-Wing, Rotary Blade Hybrid), by End Use, and Segment Forecasts, 2019–2025; Grand View Research: San Francisco, CA, USA, 2019.
- Johnson, A.A. McCook Field 1917–1927; Landfall Press: Dayton, OH, USA, 2002; pp. 190–191. ISBN 0-913428-84-1. [Google Scholar]
- Colwell, R.N. Determining the prevalence of certain cereal crop diseases by means of aerial photography. Hilgardia 1956, 26, 223–286. [Google Scholar] [CrossRef] [Green Version]
- Sugeno, M.; Hirano, I.; Kotsu, S. Development of an intelligent unmanned helicopter. In Proceedings of the 1995 IEEE International Conference on Fuzzy Systems, Yokohama, Japan, 14–20 March 1995; Volume 5, pp. 33–34. [Google Scholar]
- Yamaha Motors. Available online: https://www.yamahamotorsports.com/motorsports/pages/precision-agriculture-rmax (accessed on 26 September 2020).
- Gilmore, J. The autonomous helicopter system. In Proceedings of the Society of Photo-Optical Instrumentation Engineers, Arlington, VA, USA, 14 June 1984; Volume 485, pp. 146–152. [Google Scholar]
- Korchenko, A.; Illyash, O. The generalized classification of Unmanned Air Vehicles. In Proceedings of the 2013 IEEE 2nd International Conference Actual Problems of Unmanned Air Vehicles Developments Proceedings (APUAVD), Kiev, Ukraine, 15–17 October 2013; pp. 28–34. [Google Scholar]
- Rc Wing. Available online: https://www.hobby-wing.com/agricultural-drones.html (accessed on 30 December 2020).
- Santana, L.; Brandão, A.; Sarcinelli-Filho, M. Outdoor waypoint navigation with the AR.Drone quadrotor. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 303–311. [Google Scholar]
- Capello, E.; Guglieri, G.; Quagliotti, F. A Waypoint-Based Guidance Algorithm for mini UAVs. In Proceedings of the 2nd IFAC Workshop on Research, Education and Development of Unmanned Aerial Systems, Compiegne, France, 20–22 November 2013. [Google Scholar]
- DJI. Ace Waypoints. Available online: https://www.dji.com/es/ace-waypoint (accessed on 10 September 2020).
- Parrot. Parrot Flight Plan. Available online: https://support.parrot.com/us/support/products/parrot-bebop-2-fpv/flight-plan (accessed on 10 September 2020).
- Gautam, A.; Sujit, P.; Saripalli, S. A survey of autonomous landing techniques for UAVs. In Proceedings of the Conference: 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014. [Google Scholar]
- PARROT. Bebop Drone for Developers. Available online: https://developer.parrot.com/docs/bebop/ (accessed on 10 October 2020).
- DJI. DJI Developer SDK. Available online: https://developer.dji.com/?site=ag&from=footer (accessed on 10 October 2020).
- DJI. Terra Utility. Available online: https://www.dji.com/es/dji-terra (accessed on 10 October 2020).
- Microcopter. Microcopter Tool. Available online: https://wiki.mikrokopter.de/en/MikroKopterTool (accessed on 10 October 2020).
- SenseFly. eMotion. Available online: https://www.sensefly.com/software/emotion/ (accessed on 10 October 2020).
- Cabreira, T.; Brisolara, L.; Ferreira, P., Jr. Survey on Coverage Path Planning with Unmanned Aerial Vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Ju, H.; Il Son, H. Multiple UAV Systems for Agricultural Applications: Control, Implementation, and Evaluation. Electronics 2018, 7, 162. [Google Scholar] [CrossRef] [Green Version]
- Elmokadem, T. Distributed Coverage Control of Quadrotor Multi-UAV Systems for Precision Agricultur. IFAC Pap. 2019, 52, 251–256. [Google Scholar] [CrossRef]
- Skobelev, P.; Budaev, D.; Gusev, N.; Voschuk, G. Designing Multi-agent Swarm of UAV for Precise Agriculture. In Proceedings of the Highlights of Practical Applications of Agents, Multi-Agent Systems, and Complexity: The PAAMS Collection. PAAMS 2018. Communications in Computer and Information Science, Toledo, Spain, 20–22 June 2018; Springer: Cham, Switzerland, 2018; Volume 887. [Google Scholar]
- Hu, J.; Yang, J. Application of distributed auction to multi-uav task assignment in agriculture. IJPAA 2018, 1. [Google Scholar] [CrossRef] [Green Version]
- Ju, C.; Son, H. Discrete Event Systems based Modeling for Agricultural Multiple Unmanned Aerial Vehicles: Automata Theory Approach. In Proceedings of the 18th International Conference on Control, Automation and Systems (ICCAS), Pyeong Chang, Korea, 17–20 October 2018; pp. 258–260. [Google Scholar]
- Albani, D.; IJsselmuiden, J.; Haken, R.; Triann, V. Monitoring and mapping with robot swarms for agricultural applications. In Proceedings of the 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017; pp. 1–6. [Google Scholar]
- Barrientos, A.; Colorado, J.; del Cerro, J.; Martinez, A.; Rossi, C.; Sanz, D.; Valente, J. Aerial Remote Sensing in Agriculture: A Practical Approach to Area Coverage and Path Planning for Fleets of Mini Aerial Robots. J. Field Robot. 2011, 28, 667–689. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez-de-Santoos, P.; Ribeiro, A.; Fernandez-Quintanilla, C.; Lopez-Granados, F.; Brandstoetter, M.; Tomic, S.; Debilde, B. Fleets of robots for environmentally-safe pest control in agriculture. Precis. Agric. 2017, 18, 574–614. [Google Scholar] [CrossRef]
- Roldan, J.J.; del Cerro, J.; Barrientos, A. A proposal of methodology for multi-UAV mission modeling. In Proceedings of the Mediterranean Conference on Control Automation, Torremolinos, Spain, 16–19 June 2015. [Google Scholar]
- DJI. Drones for Agriculture. Available online: https://ag.dji.com/es?site=brandsite&from=nav (accessed on 10 October 2020).
- Parrot. Parrot Bluegrass Fields. Available online: https://atyges.es/tienda/en/parrot-bluegrass-fields/ (accessed on 10 October 2020).
- Huuskonen, J.; Oksanen, T. Soil sampling with drones and augmented reality in precision agriculture. Comput. Electron. Agric. 2018, 154, 25–35. [Google Scholar] [CrossRef]
- Mulla, D. Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. Biosyst. Eng. Spec. Issue Sens. Agric. Rev. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- McMurtrey, J.; Corp, L.; Kim, M.; Chappelle, E.; Daughtry, C.; DiBenedetto, J. Fluorescence techniques in agricultural applications. In Proceedings of the Volume 10301, Optics in Agriculture: 1990–2000: A Critical Review, Boston, MA, USA, 28 March 2001; p. 1030104. [Google Scholar] [CrossRef]
- Ishimwe, R.; Abutaleb, K.; Ahmed, F. Applications of Thermal Imaging in Agriculture—A Review. Adv. Remote Sens. 2014, 3, 128. [Google Scholar] [CrossRef] [Green Version]
- Valente, J.; Barrientos, A.; Del Cerro, J.; Sanz, D. A waypoint-based mission planner for a farmland coverage with an aerial robot-a precision farming tool. In Proceedings of the 8th European Conference on Precision Agriculture (ECPA’11), Prague, Czech Republic, 11–14 July 2011; pp. 427–436. [Google Scholar]
- Masina, M.; Lambertini, A.; Daprà, I.; Mandanici, E.; Lamberti, A. Remote Sensing Analysis of Surface Temperature from Heterogeneous Data in a Maize Field and Related Water Stress. Remote Sens. 2020, 12, 2506. [Google Scholar] [CrossRef]
- Meng, J.; Cheng, Z. Improving the estimation of soil-available nutrients at the sub-field scale using time-series UAV observations. Remote Sens. Lett. 2020, 11, 739–747. [Google Scholar] [CrossRef]
- Shendryk, Y.; Sofonia, J.; Garrardc1, R.; Rista, Y.; Skocajd, D.; Thorburna, P. Fine-scale prediction of biomass and leaf nitrogen content in sugarcane using UAV LiDAR and multispectral imaging. Int. J. Appl. Earth Obs. Geoinf. 2020, 92, 102177. [Google Scholar] [CrossRef]
- Cai, Y.; Guan, K.; Nafziger, E.; Chowdhary, G.; Peng, B.; Jin, Z.; Wang, S. Detecting In-Season Crop Nitrogen Stress of Corn for Field Trials Using UAV- and CubeSat-Based Multispectral Sensing. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 5153–5166. [Google Scholar] [CrossRef]
- Songyang, L.; Ding, X.; Kuang, Q.; Ata-UI-Karim, S.; Cheng, T.; Liu, X.; Cao, W. Total views article has an altmetric score of 1 View Article Impact Suggest a Research Topic > SHARE ON 0 0 0 New original research article. Front. Plant Sci. 2018. [Google Scholar] [CrossRef] [Green Version]
- Chebrolu, N.; Läbe, T.; Stachniss, C. Robust Long-Term Registration of UAV Images of Crop Fields for Precision Agriculture. IEEE Robot. Autom. Lett. 2018, 3, 3097–3104. [Google Scholar] [CrossRef]
- Heidarian Dehkordi, R.; Burgeon, V.; Fouche, J.; Placencia Gomez, E.; Cornelis, J.-T.; Nguyen, F.; Meersmans, J. Using UAV Collected RGB and Multispectral Images to Evaluate Winter Wheat Performance across a Site Characterized by Century-Old Biochar Patches in Belgium. Remote Sens. 2020, 12, 2504. [Google Scholar] [CrossRef]
- Rose, T.; Kage, H. The Contribution of Functional Traits to the Breeding Progress of Central-European Winter Wheat Under Differing Crop Management Intensities. Front Plant Sci. 2019, 6, 1521. [Google Scholar] [CrossRef] [Green Version]
- Candiago, S.; Remondino, F.; De Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating Multispectral Images and Vegetation Indices for Precision Farming Applications from UAV Images. Remote Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef] [Green Version]
- Su, J.; Liu, C.; Hu, X.; Xu, X.; Guo, L.; Chen, W.-H. Spatio-temporal monitoring of wheat yellow rust using UAV multispectral imagery. Comput. Electron. Agric. 2019, 167, 105035. [Google Scholar] [CrossRef]
- Di Nisio, A.; Adamo, F.; Acciani, G.; Attivissimo, F. Fast Detection of Olive Trees Affected by Xylella Fastidiosa from UAVs Using Multispectral Imaging. Sensors 2020, 20, 4915. [Google Scholar] [CrossRef] [PubMed]
- Wiesner-Hanks, T.; Wu, H.; Stewart, E.; DeChant, C.; Kaczmar, N.; Lipson, H.; Nelson, R.J. Millimeter-Levl Plant Disease Detection From Aerial photographs via Deep Learning and Crowdsourced Data. Front. Plant Sci. 2019, 12, 1550. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gómez-Candón, D.V. Field phenotyping of water stress at tree scale by UAV-sensed imagery: New insights for thermal acquisition and calibration. Precis. Agric. 2016, 17, 786–800. [Google Scholar] [CrossRef]
- Bhandari, S.; Raheja, A.; Chaichi, M.; Pham, F.; Sherman, T.; Dohlen, M.; Khan, S. Comparing the effectiveness of hyperspectral and multispectral data in detecting citrus nitrogen and water stresses. In Proceedings of the Volume 11008, Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping IV, Baltimore, MD, USA, 15–16 April 2019. [Google Scholar]
- Kandylakis, Z.; Falagas, A.; Karakizi, C.; Karantzalos, K. Water Stress Estimation in Vineyards from Aerial SWIR and Multispectral UAV Data. Remote Sens. 2020, 12, 2499. [Google Scholar] [CrossRef]
- Perea-Moreno, A.-J.; Aguilera-Ureña, M.-J.; Meroño-De Larriva, J.-E.; Manzano-Agugliaro, F. Assessment of the Potential of UAV Video Image Analysis for Planning Irrigation Needs of Golf Courses. Water 2016, 8, 584. [Google Scholar] [CrossRef] [Green Version]
- Schirrmann, M.; Giebel, A.; Gleiniger, F.; Pflanz, M.; Lentschke, J.; Dammer, K.-H. Monitoring Agronomic Parameters of Winter Wheat Crops with Low-Cost UAV Imagery. Remote Sens. 2016, 8, 706. [Google Scholar] [CrossRef] [Green Version]
- Roosjen, P.; Suomalainen, J.; Bartholomeus, H.; Clevers, J. Hyperspectral Reflectance Anisotropy Measurements Using a Pushbroom Spectrometer on an Unmanned Aerial Vehicle—Results for Barley, Winter Wheat, and Potato. Remote Sens. 2016, 8, 909. [Google Scholar] [CrossRef] [Green Version]
- Honkavaara, E.; Saari, H.; Kaivosoja, J.; Pölönen, I.; Hakala, T.; Litkey, P.; Pesonen, L. Processing and Assessment of Spectrometric, Stereoscopic Imagery Collected Using a Lightweight UAV Spectral Camera for Precision Agriculture. Remote Sens. 2013, 5, 5006–5039. [Google Scholar] [CrossRef] [Green Version]
- Jin, X.; Liu, S.; Baret, F.; Hemerlé, M.; Comar, A. Estimates of plant density of wheat crops at emergence from very low altitude UAV imagery. Remote Sens. Environ. 2017, 198, 105–114. [Google Scholar] [CrossRef] [Green Version]
- Devia, C.A.; Rojas, J.P.; Martinez, C.; Mondragon, I.F.; Patino, D.; Rebolledo, M.; Colorado, J. High-Throughput Biomass Estimation in Rice Crops Using UAV Multispectral Imagery. J. Intell. Robot. Syst. 2019, 96, 573–589. [Google Scholar] [CrossRef]
- Lin, Z.; Guo, W. Sorghum Panicle Detection and Counting Using Unmanned Aerial System Images and Deep Learning. Front. Plant Sci. 2020. [Google Scholar] [CrossRef] [PubMed]
- Lussem, U.; Schellberg, J.; Bareth, G. Monitoring Forage Mass with Low-Cost UAV Data: Case Study at the Rengen Grassland Experiment. PFG J. Photogramm. Remote Sens. Geoinf. Sci. 2020. [Google Scholar] [CrossRef]
- Chu, T.; Chen, R.; Landivar, J.; Maeda, M.; Yang, C.; Starek, M.J. Cotton growth modeling and assessment using unmanned aircraft system visual-band imagery. J. Appl. Remote Sens. 2016, 10, 036018. [Google Scholar] [CrossRef] [Green Version]
- Mu, Y.F. Characterization of peach tree crown by using high-resolution images from an unmanned aerial vehicle. Hortic. Res. 2018, 5, 74. [Google Scholar] [CrossRef] [Green Version]
- Díaz-Varela, R.A.; De la Rosa, R.; León, L.; Zarco-Tejada, P.J. High-Resolution Airborne UAV Imagery to Assess Olive Tree Crown Parameters Using 3D Photo Reconstruction: Application in Breeding Trials. Remote Sens. 2015, 7, 4213–4232. [Google Scholar] [CrossRef] [Green Version]
- Rallo, P.; de Castro, A.; López-Granadosb, F.; Morales-Silleroa, A.; Torres-Sánchezb, J.; Jiménez, M.; PazSuáreza, M. Exploring UAV-imagery to support genotype selection in olive breeding programs. Sci. Hortic. 2020, 273, 109615. [Google Scholar] [CrossRef]
- Jiménez-Brenes, F.L.-G. Quantifying pruning impacts on olive tree architecture and annual canopy growth by using UAV-based 3D modelling. Plant Methods 2017, 13, 55. [Google Scholar] [CrossRef] [Green Version]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P.; Chiteculo, V. Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 2392–2410. [Google Scholar] [CrossRef]
- Dunford, R.; Michel, K.; Gagnage, M.; Piégay, H.; Trémelo, M.-L. Potential and constraints of Unmanned Aerial Vehicle technology for the characterization of Mediterranean riparian forest. Int. J. Remote Sens. 2009, 30, 4915–4935. [Google Scholar] [CrossRef]
- Pijl, A.; Reuterb, L.; Quarellaa, E.; Vogelb, T.; Tarollia, P. GIS-based soil erosion modelling under various steep-slope vineyard practices. CATENA 2020, 193, 104604. [Google Scholar] [CrossRef]
- D’Oleire-Oltmanns Sebastian, M.; Peter, K.; Johannes, B.R. Unmanned Aerial Vehicle (UAV) for Monitoring Soil Erosion in Morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef] [Green Version]
- López-Granados, F.; Torres-Sánchez, J.; Serrano-Pérez, A.; de Castro, A.I.; Mesas-Carrascosa, F.J.; Pena, J.M. Early season weed mapping in sunflower using UAV technology: Variability of herbicide treatment maps against weed thresholds. Precis. Agric. 2016, 17, 183–199. [Google Scholar] [CrossRef]
- Torres, S.; Torres-Sánchez, J.; Serrano-Pérez, A.; De Castro, A.; López-Granados, F. Quantifying Efficacy and Limits of Unmanned Aerial Vehicle (UAV) Technology for Weed Seedling Detection as Affected by Sensor Resolution. Sensors 2015, 15, 5609–5626. [Google Scholar]
- Torres-Sanchez, J.; lopez-Granados, F.; De Castro, A.; Peña-Barragán, J. Configuration and Specifications of an Unmanned Aerial Vehicle (UAV) for Early Site Specific Weed Management. PLoS ONE 2013, 6, e58210. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gómez-Candón, D.; De Castro, A.; López-Granados, F. Assessing the accuracy of mosaics from unmanned aerial vehicle (UAV) imagery for precision agriculture purposes in wheat. Precis. Agric. Vol. 2014, 15, 44–56. [Google Scholar] [CrossRef] [Green Version]
- Lottes, P.; Khanna, R.; Pfeifer, J.; Siegwart, R.; Stachniss, C. UAV-based crop and weed classification for smart farming. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; IEEE: Singapore, 2017. [Google Scholar]
- Barrero, O.; Perdomo, S. RGB and multispectral UAV image fusion for Gramineae weed detection in rice fields. Precis. Agric. Vol. 2018, 19, 809–822. [Google Scholar] [CrossRef]
- Bah, M.; Hafiane, A.; Canals, R. Deep Learning with Unsupervised Data Labeling for Weed Detection in Line Crops in UAV Images. Remote Sens. 2018, 10, 1690. [Google Scholar] [CrossRef] [Green Version]
- Valente, J.; Sanz, D.; Del Cerro, J.; Barrientos, A.; De Frutos, M. Near-optimal coverage trajectories for image mosaicking using a mini quad-rotor over irregular-shaped field. Precis. Agric. 2013, 14, 115–132. [Google Scholar] [CrossRef]
- Valente, J.; Sanz, D.; Barrientos, A.; Cerro, J.; Ribeiro, A.; Rossi, C. An air-ground wireless sensor network for crop monitoring. Sensors 2011, 11, 6088–6108. [Google Scholar] [CrossRef] [Green Version]
- Di Gennaro, S.; Matesea, A.; Gioli, B.; Toscano, P.; Zaldei, A.; Palliotti, A.; Genesio, L. Multisensor approach to assess vineyard thermal dynamics combining high resolution Unmanned Aerial Vehicle (UAV) remote sensing and wireless sensor network (WSN) proximal sensing. Sci. Hortic. 2017, 221, 83–87. [Google Scholar] [CrossRef]
- Polo, J.; Hornero, G.; Duijneveld, C.; García, A.; Casas, O. Design of a low-cost Wireless Sensor Network with UAV mobile node for agricultural applications. Comput. Electron. Agric. 2015, 119, 19–32. [Google Scholar] [CrossRef]
- Popescu, D.; Stoican, F.; Stamatescu, G.; Ichim, L.; Dragana, C. Advanced UAV–WSN System for Intelligent Monitoring in Precision Agriculture. Sensors 2020, 20, 817. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roldán, J.; Joossen, G.; Sanz, D.; Del Cerro, J.; Barrientos, A. Mini-UAV Based Sensory System for Measuring Environmental Variables in Greenhouses. Sensors 2015, 15, 3334–3350. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Andersen, T.; Scheeren, B.; Peters, W.; Chen, H. A UAV-based active AirCore system for measurements of greenhouse gases. Atmos. Meas. Tech. 2018, 11, 2683–2699. [Google Scholar] [CrossRef] [Green Version]
- Xiongkui, H.; Bonds, J.; Herbst, A.; Langenakens, J. Recent development of unmanned aerial vehicle for plant protection in East Asia. Int. J. Agric. Biol. Eng. 2017, 10, 18–30. [Google Scholar] [CrossRef]
- Kharim, M.; Wayayokab, A.; Shariffab, A.; FikriAbdullahab, A.; MohdHusinab, E. Droplet deposition density of organic liquid fertilizer at low altitude UAV aerial spraying in rice cultivation. Comput. Electron. Agric. 2019, 167, 105045. [Google Scholar] [CrossRef]
- Wen, S.; Zhang, Q.; Deng, J.; Lan, Y.; Yin, X.; Shan, J. Design and Experiment of a Variable Spray System for Unmanned Aerial Vehicles Based on PID and PWM Control. Appl. Sci. 2018, 8, 2482. [Google Scholar] [CrossRef] [Green Version]
- Yongjun, Z.; Shenghui, Y.; Lan, Y.; Hoffmann, C.; Chunjiang, Z.; Liping, C.; Yu, T. A novel detection method of spray droplet distribution based on LIDARs. Int. J. Agric. Biol. Eng. 2017, 10, 54–65. [Google Scholar] [CrossRef]
- Master List of Drone Laws (Organized by State & Country). Available online: https://uavcoach.com/drone-laws/ (accessed on 3 October 2020).


{kind=link}
{kind=link}
{kind=link}
| Type | UAV | Payload (kg) | Endurance (min) | Dimensions (m) |
|---|---|---|---|---|
| 8 rotors | MK Okto XL 2 | 4 | 46 | 0.95 × 0.73 × 0.45 |
| Okto-XL | 2.5 | 25 | 1.045 × 0.45 | |
| DJI Agras MG-1 | 10 | - | 1640 × 1471 × 482 | |
| Spreading Wings S1000 | 6–11 | 15 | 1.1 × 1.1 × 0.38 | |
| ARF-MikroKopter | 2.5 | 28 | 0.73 × 0.73 × 0.36 | |
| AT8 UAV | 2 | 30 | 1.2 × 1.2 × 0.4 | |
| 6 rotors | EM6-800 | 1.2 | 25 | 0.8 × 0.8 × 0.32 |
| Matrice 100/S1000 | 1 | 40 | 0.65 | |
| DJI M600 | 4.5 | 16 | 1.6 × 1.5 × 0.7 | |
| Hexacopter P-Y6/A2500_WH | 3 | 21 | 1 × 0.45 | |
| HEXA-PRO™ UAV | 2 | 40 | 0.85 | |
| AIR-200 | 3 | 40 | 2.2 | |
| 4 rotors | Parrot AR/2.0 | - | 12 | 0.52 × 0.51 |
| Parrot Anafi | - | 25 | 224 × 67 × 65 | |
| Phantom 2/3 Pro/4 Pro | 0.3 | 30 | 0.35 | |
| DJI Mavic Pro/inspire 1/inspire 2 | 0.2 | 21 | 0.29 × 0.28 × 0.11 | |
| Jifei P20 UAV | 12 | 20 | 1.8 × 1.8 × 0.47 | |
| MD4-100/1000 | 1.2 | 45 | 1.03 | |
| 3DR Iris/Solo | 0.4 | 22 | 0.4 × 0.63 × 0.15 | |
| Helicopters | Yamaha Fazer R | 32 | 25 | 3.66 × 770 × 1.078 |
| Rotomotion SR200 | 20 | 240 | 2.5 | |
| SKeldar V200 | 40 | 300 | 4.6 | |
| Fixed wing | Gatewing X100 | 0.2 | 15 | 1 × 0.6 × 0.1 |
| zangão uav | 1.1 | 60 | 1.95 | |
| Trinity F90+ | - | 90 | 2.394 | |
| eBee SQ/Plus | 0.3 | 59 | 1.1 | |
| M23 UAV | 14.6 | 25 | 3.1 × 2.9 × 1.4 | |
| Tuffwing Mapper | 2 | 40 | 1.2 × 0.6 × 0.2 | |
| Airborne XT | 200 | 3900 | 9.9 × 3.6 × 1.9 |
| Sensor Type | Brand | Main Features |
|---|---|---|
| RGB | Canon Powershot SX540 | 20.3 MP 442 g |
| Olympus PEN E-PM1 | 12 MP 216 g | |
| Sony Nex-7/ILCE | 24.2 MP 416 g | |
| Ricoh GR3 | 16.9 MP 257 g | |
| Sony α7r | 36.4 MP 407 g | |
| Multi spectral | MicaSense RedEdge | R G B Red Edge NIR 1280 × 960 230 g |
| MCA camera | 4, 6, 12 bands (user-selectable) 1280 × 1024 497 g (per camera) | |
| Mini MCA | 4, 6, 12 bands (user-selectable) 1280 × 1024 600, 700, 1300 g | |
| Micro MCA | 4, 6, 12 bands (user-selectable) 1280 × 1024 497, 530, 1000 g | |
| Parrot Sequoia | R G Red Edge NIR 2 MP 72 g (Includes 16 Mp RGB Camera) | |
| InGaAs | Infrared 640 × 512 | |
| Tetracam ADC lite | R G NIR 2048 × 1536 pixels 200 g | |
| Tetracam ADC micro | R G NIR 2048 × 1536 pixels 90 g | |
| Laser | Velodyne VLP-16 | range: 100 m FOV: 360 deg Horizontal ± 15° Vert Accuracy: 3 cm 830 g |
| Hokuyo UTM-30LX | Range: 30 m FOV: 270 deg Angular res: 0.25 deg Accuracy: 50 mm 210 g | |
| Nikon Forestry Pro II Ragefinder/Hypsometerm | Range: 7 m–1600 m FOV: 7.5 degrees 170 g | |
| Thermal | DJI Zenmuse XT | 640 × 512 7.5–13.5 μm Weight: 270 g |
| Xenics Bobcat 640 GigE SWIR/vSWIR | 640 × 512 500–1700 μm 285 g | |
| Thermoteknix MicroCAM Integrator | 384 × 288 17 µm 60 g | |
| FLIR Vue Pro R | 640 × 512 113 g | |
| MultiScanner | RapidSCAN CS-45 | 670, 730, 780 nm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
del Cerro, J.; Cruz Ulloa, C.; Barrientos, A.; de León Rivas, J. Unmanned Aerial Vehicles in Agriculture: A Survey. Agronomy 2021, 11, 203. https://doi.org/10.3390/agronomy11020203
del Cerro J, Cruz Ulloa C, Barrientos A, de León Rivas J. Unmanned Aerial Vehicles in Agriculture: A Survey. Agronomy. 2021; 11(2):203. https://doi.org/10.3390/agronomy11020203
Chicago/Turabian Styledel Cerro, Jaime, Christyan Cruz Ulloa, Antonio Barrientos, and Jorge de León Rivas. 2021. "Unmanned Aerial Vehicles in Agriculture: A Survey" Agronomy 11, no. 2: 203. https://doi.org/10.3390/agronomy11020203
APA Styledel Cerro, J., Cruz Ulloa, C., Barrientos, A., & de León Rivas, J. (2021). Unmanned Aerial Vehicles in Agriculture: A Survey. Agronomy, 11(2), 203. https://doi.org/10.3390/agronomy11020203