Abstract
With precision agriculture developing rapidly worldwide, water-saving, energy-saving, environment-friendly, and efficient agricultural production activities are effective ways to address human needs for agricultural products under the conditions of intensifying climate change, limited available arable land resources, and rapid population growth. Ground-based plant-protection machinery applied to large fields has difficulty solving the pest and disease prevention needs of mountain orchards since they feature undulating topography changes and low standardization of orchards. Unmanned aerial vehicles (UAVs) have broad development prospects in pest control in mountain orchards because of their advantages of not being restricted by terrain, strong maneuverability, and hover ability. This paper reviews the recent development of plant-protection UAVs from three perspectives, i.e., positioning and navigation technology, flight attitude control technology, and route planning in mountain orchards. We highlight that the future research should focus on following technology development, including (1) positioning navigation technology with high positioning accuracy and strong anti-interference capability, (2) intelligent control technology with high dynamic stability and better calculation accuracy, and (3) the optimization of the route-planning algorithm covering multiple constraints and the cluster cooperative operation scheme of plant-protection UAVs applicable to mountain orchards. These reviewed results could provide a reference for the future development of plant-protection UAVs, which will become the focus of future research.
1. Introduction
With the world population expected to reach 9 billion in 2050 and the production of agricultural products needing to increase by 70%, traditional agriculture on large fields with flat terrain faces the challenge of meeting human needs for agricultural products under the conditions of increasing climate change and limited and gradually decreasing arable land resources [1]. Therefore, the importance of arable land resources has been increasing in various countries, and the value of the exploitation of mountainous areas has become more prominent. The terrain in mountainous areas is highly variable, and the plots that can be used as arable land are more scattered and cannot form a large area for cultivation. Planting on gentle slopes and planting in small terraces that vary with the mountainous terrain are the main forms of crop cultivation in mountainous areas [2]. Due to the poor irrigation conditions in mountainous areas and the unsatisfactory depth of shallow soil, fruit trees with well-developed root systems and high drought resistance dominate the crop types.
Pest and disease control is an important and indispensable part of fruit tree production. Most orchards in Europe and the United States are planted in large fields with flat terrain due to their unique geographical environment and agricultural development policies. Though they formed an early portion of the research on plant-protection machinery and have already achieved mechanized application, most tractors are equipped with relevant equipment for pest control, which still needs to be improved in terms of reducing carbon emissions and saving non-renewable energy.
Hilly and mountainous areas account for 72% of China’s land area. Due to the undulating terrain, low standardization of orchards, different planting patterns, and poor road conditions in the mountainous areas of China, large field ground plant-protection machinery cannot work effectively in the mountainous environment, which affects the efficiency and quality of pest and disease control in orchards. Currently, agricultural production activities in China’s mountainous areas are still dominated by human labor. The integrated mechanization rate of crop cultivation, seeding, management, and harvesting in typical hilly mountainous regions is less than 50% [3].
In recent years, with the improvement of the economic level and the deepening of the concept of environmental sustainability, precision agriculture technology to improve the quality of crops by optimizing agricultural production equipment is developing rapidly worldwide [4]. Intelligent, efficient, and low-carbon technology has become a significant development trend of agricultural machinery and equipment [5]. Unmanned aerial vehicles (UAVs) are widely used in agricultural production fields such as crop growth state monitoring [6,7,8], pesticide spraying [9], crop yield assessment [10], and pest and disease monitoring [11] because of their autonomous take-off and landing, hovering capabilities, high mobility, and agility. The application of UAV-borne equipment for crop pest control has become an effective technical tool [12,13]. Western countries such as the United States and Japan now have a complete agricultural aviation system. In their practical application of precision agriculture, agricultural activities such as the monitoring of crop health [14,15] and production estimation [16,17] can be achieved through UAVs carrying remote sensing systems with multispectral sensors. Such applications could avoid economic losses due to a lack of effective feedback on crop information. In terms of pesticide spraying, UAVs have effectively reduced the degree of pesticide pollution to the environment with Global Navigation Satellite System/Inertial Navigation System (GNSS/INS), Real-Time Kinematic (RTK), and other positioning methods as well as a spraying speed that far exceeds that of human hands while accurately and efficiently completing the task of plant protection.
China has been conducting research on UAVs since the 1950s, but its application areas are limited to the military, and research on plant-protection UAVs started late compared to Western countries [18]. Since then, the development of plant-protection UAV products and technologies has been slow. In 2014, after the policy of strong national support for the construction of agricultural aviation, plant-protection UAVs developed rapidly. As of 2021, domestic plant-protection UAVs have reached 120,000 units in terms of ownership, and the development is still on a rapid growth trend [19]. Its application scope also extends to agricultural production activities such as the application of medicine, fertilizer, and seeding.
Currently, plant-protection UAVs in the mountain orchard environment for plant-protection operations are based on manual remote control. The operation effect and efficiency depend largely on the operator’s proficiency. There are problems such as high omission and repetition rates and serious deviation between actual and theoretical routes [20,21]. Due to the undulating terrain and the uneven arrangement of fruit trees, Plant-protection operations in mountainous areas have higher standards in terms of the flight path, operator, and UAV flight control compared to plant-protection operations in flat fields in order to ensure the operational effectiveness and operational efficiency of plant-protection UAVs in mountainous orchards on this basis [22,23,24].
It is of great practical significance to improve the work quality of plant-protection UAVs for orchard planting in mountainous areas. Combining positioning and navigation, UAV flight attitude control, route planning, and other technologies is important to improve the precision of plant-protection UAV route control in mountainous areas and determine plant-protection UAV routes with high working efficiency [25]. This paper summarizes plant-protection UAVs’ current technical research status from three aspects: positioning and navigation, flight attitude control, and mountain orchard route planning. We analyze their respective advantages and disadvantages and point out their development trends to provide technical references for the research of plant-protection UAVs in mountainous areas.
2. Positioning and Navigation Technology for Plant-Protection UAVs
The positioning and navigation system is the UAV’s core component, providing information such as attitude, speed, and position [26]. Plant-protection UAVs need specific autonomous flight capabilities when carrying out plant-protection tasks. They must rely on the feedback of the positioning and navigation system for attitude control. High accuracy and stable communication of UAV positioning and navigation is essential for plant-protection UAVs to complete plant-protection tasks efficiently in mountain orchard scenarios.
Since the Global Navigation Satellite System (GNSS) is susceptible to application scenarios, achieving the desired positioning effect in more complex environments [27] is impossible. Therefore, most practical applications combine GNSS with other techniques such as Inertial Navigation System (INS) [27] and Real-Time Kinematic (RTK) [28,29] to improve overall positioning accuracy and stability.
In the face of accuracy, obstacle avoidance requirements are relatively high operating conditions: most of the RTK technology must be combined with vision sensors and radar for plant-protection UAV positioning navigation. The performance of each positioning and navigation technology is compared in Table 1.

Table 1.
Performance comparison of various navigation technologies.
Researchers have long studied Inertial Navigation System (INS)/Global Satellite Navigation System (GNSS) for positioning and navigation of plant-protection UAVs. However, this method could lead to a yaw distance (maximum 3 m and average 0.1 m) due to the complex wind direction and airflow factors in the agricultural operating environment [40]. Therefore, this method has unstable performance in plant-protection operations.
The working environment of mountain orchard plant protection is more complex than that of the field, and the optimization of hardware devices in the system to enhance the anti-interference capability is the research direction of this technology applied to mountain orchard plant-protection UAV. The development of RTK technology (Figure 1) is of great significance for the practical application of GNSS [41], which has brought about implementing refined plant-protection UAV operation by improving positioning accuracy. Currently, Chinese plant-protection UAVs mainly apply RTK technology for positioning and navigation, among which the plant-protection UAVs of DJI and XAG [42] are the most representative and have good performance in the market application.
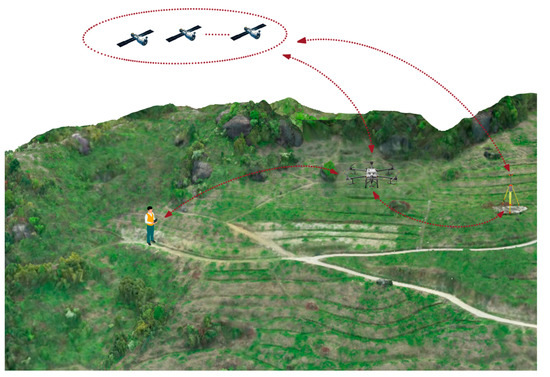
Figure 1.
RTK operating principle.
In recent years, the positioning and navigation technology of UAVs using vision or radar sensors combined with RTK has become a hot spot for research due to its advantages of the strong capacity to resist disturbance and high positioning accuracy. Among them, simultaneous localization and mapping (SLAM) technology [43,44,45] is the most representative and has been widely studied in the fields of UAVs and robots. Vision processing technology can obtain two-dimensional and three-dimensional information about the working environment of plant protection UAVs, which can be used in conjunction with RTK technology to accomplish plant-protection tasks more accurately. However, since SLAM technology relies on a camera to obtain two-dimensional information, its operational effect is more sensitive to light. Currently, the method is mainly applied in the precision application of plant-protection UAVs [46] and obstacle avoidance [47]. The application of radar sensors on plant-protection UAVs for positioning and navigation is more advantageous in anti-interference due to its strong penetration ability. Thus, it is more suitable for plant-protection operations that require high precision. However, it has not been widely used in the market due to its high cost.
3. Plant-Protection UAV Flight Attitude Control Technology
The plant-protection UAV needs to fly at a fixed height or imitate the ground according to the height of the fruit trees when carrying out plant-protection operations. Fruit trees in mountain orchards are mostly planted on the contour plane of the mountain. The orchard as a whole has a stepped distribution. Furthermore, limited by the shape of the mountain, fruit trees at the same height are mostly distributed in a curved trend rather than in straight lines. The flight of a plant-protection UAV is prone to deviate from the set course since it is affected by many factors, such as topography, airflow disturbance, load shaking, and load quality, which are changing constantly [48]. To achieve accurate and stable operation of plant-protection UAVs, the flight attitude of plant-protection UAVs needs to be controlled dynamically [49].
In mountain orchards, the structure schematic and power model of the more widely used and technically mature quadrotor plant-protection UAV are shown in Figure 2 and Figure 3. Two of the four rotors rotate clockwise (CW), and the other two rotate counterclockwise. By changing each rotor’s rotation speed, the rack’s torque is adjusted to realize the roll, pitch, and rotation of the plant-protection UAV in the flight process.
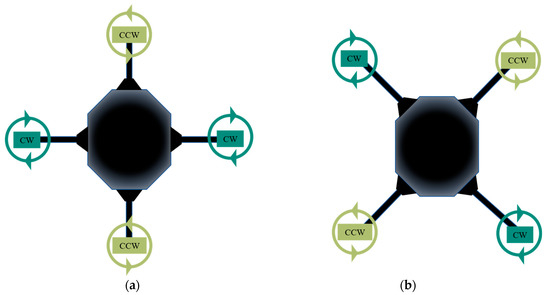
Figure 2.
Structure schematic of quadrotor plant-protection UAVs ((a) cross type; (b) x type).
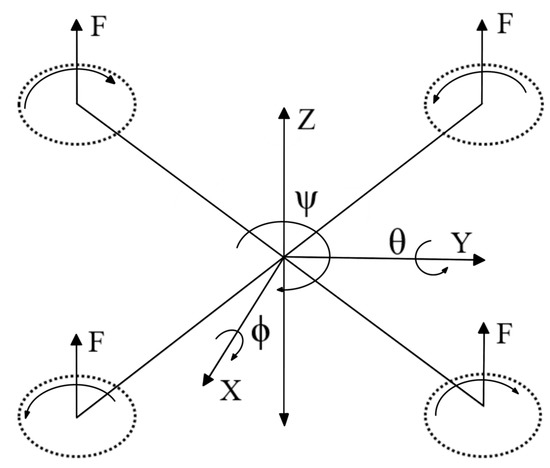
Figure 3.
Quadrotor plant-protection UAV power model (ϕ, θ, and ψ represent rolling angle, pitch angle, and yaw angle, respectively).
In the field of quadrotor UAV control, with the development of modern control theory, researchers have proposed a variety of UAV attitude-control methods, including linear control, nonlinear control, and intelligent control (Table 2).
Table 2.
UAV control methods.
For the problem of attitude control of quadrotor UAV, researchers have explored deeply and have formed several kinds of solutions. The development of quadrotor UAVs has been driven by different degrees of optimization in robustness, stability, and anti-interference. However, because a quadrotor UAV is a typical underactuated system with incomplete constraints of an intrinsically nonlinear system that cannot achieve complete feedback linearization, stable control of a quadrotor UAV has great challenges. Among the different control methods mentioned above, there are problems such as high-frequency jitter and the inability to meet rapid attitude changes. These methods have not yet achieved the ideal stable control state. With the rise of artificial intelligence, intelligent control technology has gradually attracted widespread attention in domestic research. Intelligent control technology is better than other control methods in calculation accuracy, anti-interference ability, and dynamic performance, and many scholars have succeeded in their experiments [67]. However, there is still a certain distance from commercialization to being widely used in the market.
4. Plant-Protection UAV Mountain Orchard Route Planning
Route planning of plant-protection UAVs for the operating environment to obtain energy- and pesticides-saving routes is essential to ensuring that plant-protection UAVs can efficiently complete plant-protection tasks. Most plant-protection operation areas contain multiple constraints and have specific requirements for fast solutions of path planning. The focus of current research is a route-planning approach that fully incorporates multiple constraints such as obstacles, complex boundaries, multiple operating areas, and the number of drug and battery refills. Most orchards in mountainous areas are built according to the mountainous terrain. Due to undulating topography and a nonstandard planting process, the height of the fruit tree canopy varies greatly and is not evenly arranged in the radial and horizontal directions. Therefore, the constraints for route planning in mountain orchards are more complex. The fixed-height operating routes in grand fields do not apply to mountain orchards, which requires 3D route planning according to the operating environment factors of mountain orchards.
4.1. Route Planning Method of Plant-Protection UAVs
Most plant-protection UAV operating routes are conducted based on complete coverage of the operating area. Such route-planning methods belong to the category of full-coverage path-planning algorithms [72], i.e., obtaining the route that traverses the operation area with the lowest cost by first obtaining the shape, area, and obstacle distribution of the operation area in advance, combined with factors such as the battery, liquid, and route length [73,74]. The major examples of this route-planning method are Boustrophedon cellular decomposition (Figure 4) and the internal spiral coverage (Figure 5).
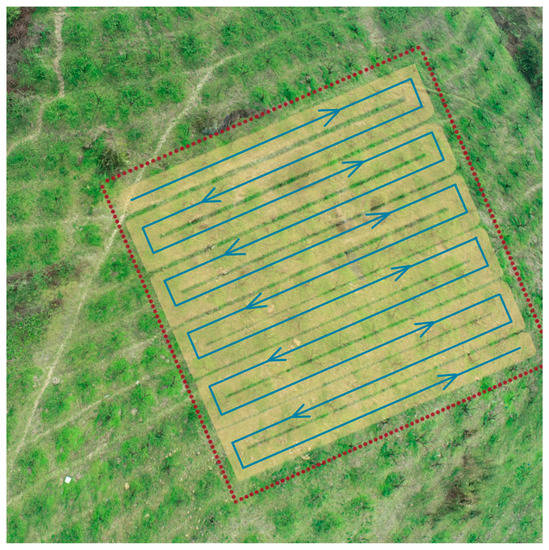
Figure 4.
Boustrophedon Cellular Decomposition.
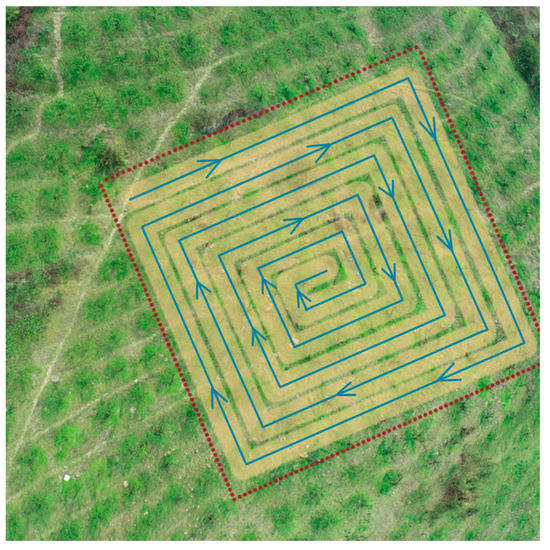
Figure 5.
Internal Spiral Coverage.
In order to achieve the expected effect, the operation requires accounting for the UAVs’ technical characteristics, the operation area conditions, and the environmental factors [75]. With more changes in terrain and varying canopy size and types of trees, the mountain regions have more complex characteristics than large fields. The two-dimensional route planning, which is designed for field environment or ground mobile robots, cannot ensure the safety of plant-protection UAVs and achieve the expected plant-protection operation effect in mountain environment operations. Therefore, three-dimensional route planning is necessary, which can adjust according to the height of fruit trees and terrain changes. In addition, since plant-protection UAVs still have limitations in terms of range and load and need to resupply consumables such as batteries and fluids, route planning should be focused on obtaining optimal three-dimensional plant-protection routes, such as those with the least energy consumption, the shortest operating path, and the shortest operating time, etc. [76].
The operation parcel needs to be divided if it has a complex boundary, such as convex or concave polygons. Convex polygonal plots [77,78,79] are processed by dividing them into several regular subregions to search for optimal course angle and flight path planning, respectively. In addition, it is also possible to add algorithms for route planning based on the raster method. Concave polygonal plots [80] are processed by converting them into multiple sub-convex polygons, performing route planning separately, and finally, finding the connection order of each sub-convex edge route by an optimization method.
The application of pesticides through plant-protection UAV is continuous for the full-coverage routes. Application repeatedly at the corners of the routes and in the area where the application (e.g., between the rows of trees) is not needed would cause waste of pesticides and environmental pollution. In recent years, with the continuous implementation of precision agriculture policy and the constant development of UAV positioning and control technology, scholars have further explored the planning of plant-protection UAV routes in combination with the operating environment of mountain orchards, e.g., the zigzag shape with the heart of fruit trees in orchards as the operating point of plant-protection UAVs [78,81] (Figure 6).

Figure 6.
Z-shaped route diagram.
The “zigzag” planting operation route is usually operated manually by the operator or using the mapping UAV to collect mountain orchard information in advance, combined with three-dimensional modeling software to establish a three-dimensional model of the mountain orchard and identify the operating point to reduce energy consumption, save liquid resources, and reduce environmental pollution. However, the accuracy of the 3D model and its ability to identify all the fruit trees are questionable since the quality of 3D models is highly dependent on image resources, which could be influenced by many factors such as the mapping methods [82,83] and mapping paths [78,84]. In addition, the mountain environment could cause signal interference for plant-protection UAVs, resulting in positioning errors. Plant-protection UAVs often cannot accurately apply crop-protection pesticides over the heart of trees during operations.
4.2. Route Planning of Single Plant-Protection UAV
Poor endurance is the biggest problem faced by plant-protection UAVs in practical applications [85]. In a plant-protection operation for a large area, consumables such as batteries, liquid, and fertilizer must be resupplied several times. The research goals of the current stage of plant-protection UAV route planning are to shorten the total length of the route, reduce energy consumption, and reduce the number of resupplies to ensure the plant-protection effect. In addition, the operating environment of plant-protection UAVs, such as obstacles, complex boundaries, and changes in topography, need to be considered comprehensively according to the actual situation when planning the route.
Scholars have researched the route planning of individual plant-protection UAVs. In route-planning algorithms, various classical algorithms are optimized, improved, and applied to route planning, such as the gravitational search gravitational search algorithm [86], ant colony optimization algorithm [87], genetic algorithm [85], and simulated annealing algorithm [88] (Table 3). Compared to unplanned plant-protection UAV routes, the ones with planned routes have significant improved results regarding total route length and UAV energy consumption. In addition, many path-planning algorithms [89] are being proposed by scholars but are still in the research stage and are less-often applied compared to the optimized classical algorithms.
Table 3.
UAV algorithm application examples.
4.3. Route Planning of Multiple Plant-Protection UAVs
As the battery power of a single plant-protection UAV can only support 20–30 min of continuous operation, when facing multiple operation areas or a single large operation area, the equipment needs battery changes frequently and to make frequent reciprocal flights between the operation area and the resupply point, which consumes the effective operation time. Compared with a single plant-protection UAV, multiple plant-protection UAVs can realize the work of simultaneous operation in multiple operation areas and collaborative operation in a single operation area. Plant-protection UAVs cluster route planning has received extensive attention from scholars to realize the cooperative operation of multiple plant-protection UAVs, respond to unexpected agricultural production situations, and improve plant-protection efficiency [94].
In the mountain orchard environment, the cooperative operation of multiple plant-protection UAVs needs to reasonably allocate the plant-protection tasks according to the types of fruit trees and planting methods in the orchard and achieve rapid plant-protection operations in the target area through orderly dispatch of multiple plant-protection UAVs [95]. Its overall operation technology route is shown in Figure 7. In addition, cooperative operations of multiple plant-protection UAVs should fully consider the route planning of individual plant-protection UAVs to reduce the total energy consumption of UAV swarm operations based on the highest efficiency of individual plant-protection UAVs. Currently, the optimization objectives commonly used for cooperative path planning of UAV swarm are minimum energy consumption, optimal path, minimum resupply times, shortest time, etc.
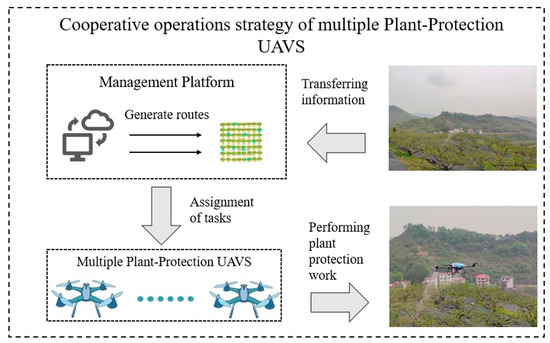
Figure 7.
Cooperative operations strategy of multiple plant-protection UAVs.
There are currently more studies on multiple plant-protection UAVs’ cooperative operation, which are applied in military and mapping fields. However, research on plant-protection UAV cooperative operations to complete plant protection tasks is relatively insufficient and still in the experimental stage. Based on the minimum energy consumption, Xu et al. [85] carried out route planning of multiple plant-protection UAVs combined with the raster method. However, the flight route in the experiment deviated significantly from the planning route. Cao et al. [22] ranked the tasks according to the priority strategy of pest and disease level, operation time window length, and operation area size. Then, the authors used an improved genetic algorithm to obtain the matching order and transfer routes of UAVs of multiple flying defense teams in different farmlands. Xu et al. [96] combined the conditional constraints to establish a task-assignment model to minimize the operation time of multiple plant-protection UAVs and proposed an improved genetic algorithm to solve the problem by introducing a heuristic initialization criterion and an adaptive genetic operator.
Cooperative operation of multiple plant-protection UAVs is an effective way to conduct emergency plant-protection operations, multi-plot plant-protection operations, and to control sudden pests and diseases. It can significantly improve the efficiency of plant-protection operations and effectively guarantee healthy agricultural production. Due to the significant differences between theoretical models and practical applications and the short research time on this issue, large-scale applications have not yet been formed.
5. Discussion
With the development of precision agriculture and UAV technology, more and more plant-protection UAVs are being used in agricultural production, and their number is still on the rise. Plant-protection UAVs have significantly improved production efficiency, but they also have their own limitations, one of which is the endurance power. Currently, he lithium batteries only support the operation of plant-protection UAVs for 20–30 min, which cannot guarantee continuous operation for a long period of time, and in practice, it is usually necessary to prepare multiple batteries to meet the operational needs [97]. During operations in mountainous orchards, the plant-protection UAVs need to change their flight height frequently according to the terrain and the height of the fruit tree canopy, which consumes more power than flight operations at a fixed height in a flat terrain environment, which results in the need for multiple battery changes for a single operation mission of the plant-protection UAVs. For this reason, researchers are developing hybrid batteries to improve this situation [98].
In the mountain orchard operating environment, plant-protection UAVs are susceptible to interference from environmental factors such as altitude and terrain change, and the impact of weak range; therefore, plant-protection UAVs need more accurate positioning and navigation systems, flight attitude-control technology with high stability and anti-interference capability, and energy-efficient operating routes to ensure operational effectiveness and efficiency in the mountain orchard environment. In terms of positioning and navigation systems, RTK technology has been widely used, but there is still room for optimization in terms of accuracy and anti-interference ability. In addition, SLAM technology using cameras or LIDAR can realize real-time mapping, autonomous identification, and obstacle avoidance to improve operational efficiency. At present, SLAM technology is mainly applied in the field of mapping using UAVs and has not yet been applied to plant-protection UAVs, but its performance can undoubtedly significantly improve the operational effectiveness and efficiency of plant-protection UAVs and will become a research hotspot for the positioning and navigation system of plant-protection UAVs [99,100]. In terms of flight attitude control, linear and nonlinear control methods have been more often applied to quadrotor plant-protection UAVs, and their effects have their own advantages and disadvantages. To solve the problem of stable control of quadrotor plant-protection UAVs, researchers have increasingly focused on intelligent control techniques that have better computational accuracy, anti-interference capability, and dynamic performance than other control methods, and many experiments have been conducted, and the optimization and improvement of intelligent algorithms will become a hot spot for future research on UAV attitude-control technology [71]. In terms of route planning, the route planning of a single plant-protection UAV has matured, and because the range problem of a single plant-protection UAV cannot meet the operational needs of a large area or the need for emergency treatment, researchers have explored the scheme of cooperative operation of multiple plant-protection UAVs, and the cooperative operation of multiple types of UAVs and multiple types of agricultural machinery is of great significance in future research [101,102].
6. Conclusions
Plant-protection UAVs are far more efficient than ground-based plant-protection machines in mountain orchards and can reduce carbon emissions. However, due to the short development time, the technology of plant-protection UAVs is not fully mature. Furthermore, the environmental factors inherent in the mountain orchard environment interfere with plant-protection UAVs’ positioning and navigation systems. There are still some limitations and technical difficulties in applying plant-protection UAVs in mountain orchards. Facing this situation, this paper reviews the positioning and navigation technology, flight attitude-control technology, and path planning of plant-protection UAVs from three perspectives, with the aim of contributing to the research and application of route planning of plant-protection UAVs in mountainous orchards.
Specifically, we summarize the progress and shortcomings of plant-protection UAV applications for mountain operations. Among them, the research on RTK technology, intelligent control algorithms, and route planning has promoted the application of plant-protection UAVs in mountain orchards. In the face of environmental factors in mountain orchards, positioning and navigation technology needs to improve anti-interference capability. In terms of flight attitude control and path planning, the research on intelligent control and multi-aircraft scheduling platform is not yet mature and has not been applied to actual operations. In addition, SLAM technology is limited by cost and technology and has not been applied to plant-protection UAVs.
In response to the above problems, we believe that the assistance of a 3D model can make up for the problems in positioning, but its effect is limited by the establishment of an image set of the 3D model. In addition, the research on intelligent control algorithms and the route planning of plant-protection UAVs under multiple models, types, and constraints can be further promoted so as to improve the operational efficiency of plant-protection UAVs in mountain orchards, and we call for more attention to the research of these technologies.
Author Contributions
Conceptualization, P.W., J.Z. (Jianxi Zhu), and J.Z. (Juan Zhou); methodology, P.W., J.Z. (Jianxi Zhu), and J.Z. (Juan Zhou); software, S.Y., X.B., J.C., and J.S.; validation, S.Y., J.Z. (Jianxi Zhu), P.W., J.Z. (Juan Zhou), J.C., X.B., and J.S.; formal analysis, S.Y., J.Z. (Jianxi Zhu), J.Z. (Juan Zhou) and P.W.;investigation, S.Y. and J.Z. (Jianxi Zhu); resources, J.Z. (Jianxi Zhu), J.Z. (Juan Zhou), and P.W.; data curation, S.Y., X.B., J.C., and J.S.; writing-original draft preparation, S.Y. and J.Z. (Jianxi Zhu); writing—review and editing, J.Z. (Jianxi Zhu), J.Z. (Juan Zhou), and J.C.; visualization, S.Y., X.B., J.C., and J.S.; supervision, P.W. and J.Z. (Juan Zhou); project administration P.W. and J.Z. (Juan Zhou); funding acquisition, P.W. and J.Z. (Jianxi Zhu). All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the earmarked fund for CARS (CARS-27). And the APC was funded by Digital Plant Protection Platform For Peach Orchards In Hilly Mountainous Areas. The funding organizations provided the financial support to the research projects but were not involved in the design of the study, data collection, analysis of the data, or the writing of the manuscript.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The datasets generated during and/or analyzed during the current study are not publicly available due to (REASON(S) WHY DATA ARE NOT PUBLIC) but are available from the corresponding author on reasonable request.
Acknowledgments
We would like to thank Ji Qian and Zhenbo Wei for their guidance on writing content and Jianlu Zhang and Hanlu Sun for their help with picture structure.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A Compilation of UAV Applications for Precision Agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
- Zheng, Y.j.; Jiang, S.J.; Chen, B.T.; Lv, H.T.; Wan, C.; Kang, F. Review on Technology and Equipment of Mechanization in Hilly Orchard. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–20. [Google Scholar] [CrossRef]
- Xiao, D.T. The Research on the Evaluation of Country Land Eco-Use Based on the Case of Fuliang Country. Master Thesis, Jiangxi Normal University, Nanchang, China, 2008. [Google Scholar]
- Delavarpour, N.; Koparan, C.; Nowatzki, J.; Bajwa, S.; Sun, X. A Technical Study on UAV Characteristics for Precision Agriculture Applications and Associated Practical Challenges. Remote Sens. 2021, 13, 1204. [Google Scholar] [CrossRef]
- Zhao, C.X. Analysis of the application of drone technology in modern agricultural engineering. China South. Agric. Mach. 2020, 51, 49–50. [Google Scholar] [CrossRef]
- Zhao, L. Study on adaptive dynamic inversion control of hexacopter based on Pixhawk. Master Thesis, North China University of Technology, Beijing, China, 2016. [Google Scholar]
- Luo, C.G. Research on Quadrotor Modeling and Control Methods. Master Thesis, Tiangong University, Tianjin, China, 2016. [Google Scholar]
- Wu, Q. Study of Unmanned Aerial Vehicle Route Planning. Master Thesis, North University of China, Taiyuan, China, 2015. [Google Scholar]
- Chang, A.; Jung, J.; Maeda, M.M.; Landivar, J. Crop Height Monitoring with Digital Imagery from Unmanned Aerial System (UAS). Comput. Electron. Agric. 2017, 141, 232–237. [Google Scholar] [CrossRef]
- Messina, G.; Modica, G. Applications of UAV Thermal Imagery in Precision Agriculture: State of the Art and Future Research Outlook. Remote Sens. 2020, 12, 1491. [Google Scholar] [CrossRef]
- Syifa, M.; Park, S.-J.; Lee, C.-W. Detection of the Pine Wilt Disease Tree Candidates for Drone Remote Sensing Using Artificial Intelligence Techniques. Engineering 2020, 6, 919–926. [Google Scholar] [CrossRef]
- Chen, S.Q. Problems and countermeasures of agricultural mechanization development in hilly mountainous areas. China South. Agric. Mach. 2021, 52, 39–40. [Google Scholar] [CrossRef]
- He, Y. The application of small plant protection UAVs in the whole rice pest control. Farm Mach. Using Maint. 2018, 04, 72–73. [Google Scholar] [CrossRef]
- Abdulridha, J.; Ampatzidis, Y.; Kakarla, S.C.; Roberts, P. Detection of Target Spot and Bacterial Spot Diseases in Tomato Using UAV-Based and Benchtop-Based Hyperspectral Imaging Techniques. Precis. Agric. 2020, 21, 955–978. [Google Scholar] [CrossRef]
- Hariharan, J.; Fuller, J.; Ampatzidis, Y.; Abdulridha, J.; Lerwill, A. Finite Difference Analysis and Bivariate Correlation of Hyperspectral Data for Detecting Laurel Wilt Disease and Nutritional Deficiency in Avocado. Remote Sens. 2019, 11, 1748. [Google Scholar] [CrossRef]
- Jiménez-Brenes, F.M.; López-Granados, F.; de Castro, A.I.; Torres-Sánchez, J.; Serrano, N.; Peña, J.M. Quantifying Pruning Impacts on Olive Tree Architecture and Annual Canopy Growth by Using UAV-Based 3D Modelling. Plant Methods 2017, 13, 55. [Google Scholar] [CrossRef] [PubMed]
- Sarron, J.; Malézieux, É.; Sané, C.; Faye, É. Mango Yield Mapping at the Orchard Scale Based on Tree Structure and Land Cover Assessed by UAV. Remote Sens. 2018, 10, 1900. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Lan, Y.B.; Chen, L.P.; Wang, X.; Liang, D. Current Status and Future Trends of Agricultural Aerial Spraying Technology in China. Trans. Chin. Soc. Agric. Mach. 2014, 45, 53–59. [Google Scholar] [CrossRef]
- Wen, J.; Guo, L.; Zhu, Y.M. How beautiful is the future of Chinese agriculture--Interview with Academician Lan Yubin, Chief Scientist of National Joint International Research Center for Precision Agricultural Aerial Application Technology. Agric. Eng. Technol. 2021, 41, 12–15. [Google Scholar] [CrossRef]
- Seginer, I.; Nir, D.; Bernuth, R.D. von Simulation of Wind-Distorted Sprinkler Patterns. J. Irrig. Drain. Eng. 1991, 117, 285–306. [Google Scholar] [CrossRef]
- Carrión, P.; Tarjuelo, J.; Montero, J. SIRIAS: A Simulation Model for Sprinkler Irrigation: I. Description of Model. Irrig. Sci. 2001, 20, 73–84. [Google Scholar] [CrossRef]
- Cao, G.Q.; Zhang, Q.K.; Chen, C.; Zhang, M.; Zhang, J.L.; Huang, Y.X. Scheduling Model of UAV Plant Protection Team Based on Multi-objective Optimization. Trans. Chin. Soc. Agric. Mach. 2019, 50, 92–101. [Google Scholar] [CrossRef]
- Wang, D.; Fan, Y.M.; Xue, J.R.; Yuan, D.; Shen, K.C.; Zhang, H.H. Flight Path Control of UAV in Mountain Orchards Based on Fusion of GNSS and Machine Vision. Trans. Chin. Soc. Agric. Mach. 2019, 50, 20–28. [Google Scholar] [CrossRef]
- Lan, Y.B.; Chen, S.D.; Deng, J.Z.; Zhou, Z.Y.; Ou, Y.F. Development situation and problem analysis of plant protection unmanned aerial vehicle in China. J. South China Agric. Univ. 2019, 40, 217–225. [Google Scholar] [CrossRef]
- Zang, Y.; Wu, H.T.; Zhou, Z.Y.; Zang, Y.; Zhao, L.L.; Zhou, M.J.; Lv, Z.C. Terrain Following Technology of Unmanned Aerial Vehicle for Plant Protection: A review. J. Shenyang Agric. Univ. 2020, 51, 250–256. [Google Scholar] [CrossRef]
- Watanabe, Y.; Veillard, A.; Chanel, C. Navigation and Guidance Strategy Planning for UAV Urban Operation. In Proceedings of the AIAA Infotech @ Aerospace, American Institute of Aeronautics and Astronautics, San Diego, CA, USA, 4 January 2016. [Google Scholar]
- Sebesta, K.D.; Boizot, N. A Real-Time Adaptive High-Gain EKF, Applied to a Quadcopter Inertial Navigation System. IEEE Trans. Ind. Electron. 2014, 61, 495–503. [Google Scholar] [CrossRef]
- Xu, D.F. Research on the Multi-Sensor Integrated Navigation System of Multi-Rotor UAV. Ph.D. Thesis, Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun, China, 2016. [Google Scholar]
- Lv, H.F. Research on the Key Technology of Integrated Navigation Based on Inertial Navigation, Celestial Navigation and Ground-based Pseudolite Naviagtion for Automated Transfer Vehicle. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2015. [Google Scholar]
- Adusumilli, S.; Bhatt, D.; Wang, H.; Bhattacharya, P.; Devabhaktuni, V. A Low-Cost INS/GPS Integration Methodology Based on Random Forest Regression. Expert Syst. Appl. 2013, 40, 4653–4659. [Google Scholar] [CrossRef]
- Fu, L.J. Research on Key Technology of GPS/INS Integrated Navigation Monitoring and Management System. Master Thesis, Hefei University of Technology, Hefei, China, 2017. [Google Scholar]
- Chang, L.; He, H.; Qin, F. In-Motion Initial Alignment for Odometer-Aided Strapdown Inertial Navigation System Based on Attitude Estimation. IEEE Sens. J. 2017, 17, 766–773. [Google Scholar] [CrossRef]
- Lu, M. Data Analysis in Quality Controling Using GPS-RTK Technology. In Proceedings of the 2011 International Conference on Electric Technology and Civil Engineering (ICETCE), Lushan, China, 22–24 April 2011; pp. 4894–4897. [Google Scholar]
- Engel, J.K. A Research on the Effect of Different Measuring Configurations in Network RTK Applications. Measurement 2016, 78, 334–343. [Google Scholar] [CrossRef]
- Liang, M.; Min, H.; Luo, R. Graph-based SLAM: A Survey. Robot 2013, 35, 500. [Google Scholar] [CrossRef]
- Du, C.; Du, Y.; Yang, S.; Wu, S.F. Research Summary of Simultaneous Localization and Mapping Technology Based on Mobile Robot. Comput. Sci. 2018, 45, 212–215+227. [Google Scholar]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Hohenthal, J.; Alho, P.; Hyyppä, J.; Hyyppä, H. Laser Scanning Applications in Fluvial Studies. Prog. Phys. Geogr. Earth Environ. 2011, 35, 782–809. [Google Scholar] [CrossRef]
- Abayowa, B.O.; Yilmaz, A.; Hardie, R.C. Automatic Registration of Optical Aerial Imagery to a LiDAR Point Cloud for Generation of City Models. ISPRS J. Photogramm. Remote Sens. 2015, 106, 68–81. [Google Scholar] [CrossRef]
- Huang, X. Design and Implementation of Plant-Protection UAV Based on STM32F427. Master Thesis, Southwest University of Science and Technology, Mianyang, China, 2016. [Google Scholar]
- Bagheri, N. Development of a High-Resolution Aerial Remote-Sensing System for Precision Agriculture. Int. J. Remote Sens. 2017, 38, 2053–2065. [Google Scholar] [CrossRef]
- Zhang, Z.W. Research on Optimizing Route Control of Plant Protection UAV Mountain Operation. Master Thesis, Hangzhou Dianzi University, Hangzhou, China, 2021. [Google Scholar]
- Gao, J.L. Research on Multi UAV Cooperative Positioning and Mapping Technology. Master Thesis, National University of Defense Technology, Changsha, China, 2019. [Google Scholar]
- Wang, X.Y. Research on Multi-Sensor Fusion Localization Algorithm of Improved Vision Front End. Master Thesis, Chongqing University, Chongqing, China, 2021. [Google Scholar]
- Newman, P.; Cole, D.; Ho, K. Outdoor SLAM Using Visual Appearance and Laser Ranging. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, 2006, ICRA 2006, Piscataway, NJ, USA, 15–19 May 2006; IEEE: Orlando, FL, USA, 2006; pp. 1180–1187. [Google Scholar]
- Han, Y.X.; Zhang, Z.S.; Dai, M. Monocular vision system for distance measurement on feature points. Opt. Precis. Eng. 2011, 19, 1110–1117. [Google Scholar] [CrossRef]
- Ming, Y. Research on Obstacle Avoidance of Plant Protection UAV Based on VISION. Master Thesis, Shenyang Ligong University, Shenyang, China, 2019. [Google Scholar]
- Xue, J.L. Research on Control System of Four Rotor Unmanned Aerial Vehicle. Master Thesis, Taiyuan University of Technology, Taiyuan, China, 2017. [Google Scholar]
- Liu, H.P.; Long, C.J.; Wan, P.; Wang, X.Y.; Hu, B. Fuzzy self-adjusting proportion integration differentiation for eppo quadrocopter. Trans. Chin. Soc. Agric. Eng. 2015, 31, 71–77. [Google Scholar] [CrossRef]
- Sufendi; Trilaksono, B.R.; Nasution, S.H.; Purwanto, E.B. Design and Implementation of Hardware-in-the-Loop-Simulation for Uav Using Pid Control Method. In Proceedings of the 2013 3rd International Conference on Instrumentation, Communications, Information Technology and Biomedical Engineering (ICICI-BME), Bandung, Indonesia, 7 November 2013; pp. 124–130. [Google Scholar]
- Lin, F.; Duan, H.; Qu, X. PID Control Strategy for UAV Flight Control System Based on Improved Genetic Algorithm Optimization. In Proceedings of the 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014; pp. 92–97. [Google Scholar]
- Yang, J.; Cai, Z.; Lin, Q.; Wang, Y. Self-Tuning PID Control Design for Quadrotor UAV Based on Adaptive Pole Placement Control. In Proceedings of the 2013 Chinese Automation Congress, Changsha, China, 7–8 November 2013; pp. 233–237. [Google Scholar]
- Hu, Z. Control System Design of Quad Tilt-wing UAV in VTOL Mode. Master Thesis, Nanjing University of Information Science & Technology, Nanjing, China, 2014. [Google Scholar]
- Issam, K.; Qingbo, G. Research on Control Strategies for the Stabilization of Quadrotor UAV. In Proceedings of the Fifth International Conference on Intelligent Control and Information Processing, Dalian, China, 18–20 August 2014; pp. 286–292. [Google Scholar]
- Totoki, H.; Ochi, Y.; Sato, M.; Muraoka, K. Flight Testing of a Gain-Scheduled Stability and Control Augmentation System for a Quad-Tilt-Wing UAV. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, American Institute of Aeronautics and Astronautics, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Milhim, A.; Zhang, Y.; Rabbath, C.-A. Gain Scheduling Based PID Controller for Fault Tolerant Control of Quad-Rotor UAV. In Proceedings of the AIAA Infotech@Aerospace 2010, American Institute of Aeronautics and Astronautics, Atlanta, GA, USA, 20 April 2010. [Google Scholar]
- Moutinho, A.; Azinheira, J.R. A Gain-Scheduling Approach for Airship Path-Tracking. ICINCO-RA 2006, 13, 263–275. [Google Scholar] [CrossRef]
- Ahmed, B.; Pota, H.R.; Garratt, M. Flight Control of a Rotary Wing UAV Using Backstepping: Flight Control of a Rotary WING Uav Using Backstepping. Int. J. Robust Nonlinear Control 2010, 20, 639–658. [Google Scholar] [CrossRef]
- Pota, H.R.; Ahmed, B.; Garratt, M. Velocity Control of a UAV Using Backstepping Control. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 5894–5899. [Google Scholar]
- Azinheira, J.R.; Moutinho, A. Hover Control of an UAV With Backstepping Design Including Input Saturations. IEEE Trans. Control Syst. Technol. 2008, 16, 517–526. [Google Scholar] [CrossRef]
- Voos, H. Nonlinear Control of a Quadrotor Micro-UAV Using Feedback-Linearization. In Proceedings of the 2009 IEEE International Conference on Mechatronics, Malaga, Spain, 14–17 April 2009; pp. 1–6. [Google Scholar]
- Ghandour, J.; Aberkane, S.; Ponsart, J.-C. Feedback Linearization Approach for Standard and Fault Tolerant Control: Application to a Quadrotor UAV Testbed. J. Phys. Conf. Ser. 2014, 570, 082003. [Google Scholar] [CrossRef]
- Lotufo, M.A.; Colangelo, L.; Perez-Montenegro, C.; Novara, C.; Canuto, E. Embedded Model Control for UAV Quadrotor via Feedback Linearization. IFAC-Pap. 2016, 49, 266–271. [Google Scholar] [CrossRef]
- Zheng, E.-H.; Xiong, J.-J.; Luo, J.-L. Second Order Sliding Mode Control for a Quadrotor UAV. ISA Trans. 2014, 53, 1350–1356. [Google Scholar] [CrossRef] [PubMed]
- Singh, S.N.; Pachter, M.; Chandler, P.; Banda, S.; Rasmussen, S.; Schumacher, C. Input-Output Invertibility and Sliding Mode Control for Close Formation Flying of Multiple UAVs. Int. J. Robust Nonlinear Control 2000, 10, 779–797. [Google Scholar] [CrossRef]
- Xiong, J.-J.; Zhang, G.-B. Global Fast Dynamic Terminal Sliding Mode Control for a Quadrotor UAV. ISA Trans. 2017, 66, 233–240. [Google Scholar] [CrossRef]
- Santos, M.; López, V.; Morata, F. Intelligent Fuzzy Controller of a Quadrotor. In Proceedings of the 2010 IEEE International Conference on Intelligent Systems and Knowledge Engineering, Hangzhou, China, 15–16 November 2010; pp. 141–146. [Google Scholar]
- Sun, Y.J. Research on intelligent attitude control method of UAV based on three-degree-of-freedom helicopter model. Master Thesis, Nanjing University of Science and Technology, Nanjing, China, 2017. [Google Scholar]
- Zhang, S.G. Attitude control of quadrotor UAV based on neural network. Master Thesis, Harbin Institute of Technology University, Heilongjiang, China, 2017. [Google Scholar]
- Wang, Y.; Chenxie, Y.; Tan, J.; Wang, C.; Wang, Y.; Zhang, Y. Fuzzy Radial Basis Function Neural Network PID Control System for a Quadrotor UAV Based on Particle Swarm Optimization. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 2580–2585. [Google Scholar]
- Guzey, H.M.; Dierks, T.; Jagannathan, S.; Acar, L. Modified Consensus-Based Output Feedback Control of Quadrotor UAV Formations Using Neural Networks. J. Intell. Robot. Syst. 2019, 94, 283–300. [Google Scholar] [CrossRef]
- Xu, B. Research on Route Planning for Plant Protection Unmanned Aerial Vehicles. Ph.D. Thesis, China Agricultural University, Beijing, China, 2017. [Google Scholar]
- Arkin, M. Approximation Algorithms for the Geometric Covering Salesman Problem. Discrete Applied Mathematics. 1994, 55, 197–218. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A Survey on Coverage Path Planning for Robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef]
- Babel, L. Three-Dimensional Route Planning for Unmanned Aerial Vehicles in a Risk Environment. J. Intell. Robot. Syst. 2013, 71, 255–269. [Google Scholar] [CrossRef]
- Mu, Y.; Li, B.; An, D.; Wei, Y. Three-Dimensional Route Planning Based on the Beetle Swarm Optimization Algorithm. IEEE Access 2019, 7, 117804–117813. [Google Scholar] [CrossRef]
- Araujo, J.F.; Sujit, P.B.; Sousa, J.B. Multiple UAV Area Decomposition and Coverage. In Proceedings of the 2013 IEEE Symposium on Computational Intelligence for Security and Defense Applications (CISDA), Singapore, 16–19 April 2013; pp. 30–37. [Google Scholar]
- Torres, M.; Pelta, D.A.; Verdegay, J.L.; Torres, J.C. Coverage Path Planning with Unmanned Aerial Vehicles for 3D Terrain Reconstruction. Expert Syst. Appl. 2016, 55, 441–451. [Google Scholar] [CrossRef]
- Vasquez-Gomez, J.I.; Herrera-Lozada, J.-C.; Olguin-Carbajal, M. Coverage Path Planning for Surveying Disjoint Areas. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 899–904. [Google Scholar]
- Pehlivanoglu, Y.V. A New Vibrational Genetic Algorithm Enhanced with a Voronoi Diagram for Path Planning of Autonomous UAV. Aerosp. Sci. Technol. 2012, 16, 47–55. [Google Scholar] [CrossRef]
- Fan, Y.M. Research on Path Planning of UAV on Mountain Region Based on Optimal Energy Consumption. Master Thesis, Northwest A&F University, Xianyang, China, 2019. [Google Scholar]
- Chang, L.; You, W.H. Research on 3D Modeling of Real Scene Based on UAV Tilt Photography Data. Sci. Technol. Inf. 2021, 19, 12–13+16. [Google Scholar] [CrossRef]
- Ren, C.; Gao, L.M.; Feng, Y.L.; Zhang, W. An attempt of building 3D modeling based on UAV tilt photography. Bull. Surv. Mapp. 2019, 161–164. [Google Scholar] [CrossRef]
- Zheng, X.; Wang, F.; Li, Z. A Multi-UAV Cooperative Route Planning Methodology for 3D Fine-Resolution Building Model Reconstruction. ISPRS J. Photogramm. Remote Sens. 2018, 146, 483–494. [Google Scholar] [CrossRef]
- Xu, B.; Chen, L.P.; Xu, M.; Tan, Y. Path Planning Algorithm for Plant Protection UAVs in Multiple Operation Areas. Trans. Chin. Soc. Agric. Mach. 2017, 48, 75–81. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, H.T.; Li, H.C. 3D Path Planning Approach Based on Gravitational Search Algorithm for Sprayer UAV. Trans. Chin. Soc. Agric. Mach. 2018, 49, 28–33+21. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, W.H.; Xu, F.; Wang, J.H.; Chen, H.T. Path Planning Approach Based on Improved Ant Colony Optimization for Sprayer UAV. Trans. Chin. Soc. Agric. Mach. 2020, 51, 103–112+92. [Google Scholar] [CrossRef]
- Yan, W.; Long, C.J.; Li, S.J. A path planning method for agricultural UAV based on DEQA algorithm. J. Huazhong Agric. Univ. 2020, 39, 180–186. [Google Scholar] [CrossRef]
- Bouzid, Y.; Bestaoui, Y.; Siguerdidjane, H. Quadrotor-UAV Optimal Coverage Path Planning in Cluttered Environment with a Limited Onboard Energy. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 979–984. [Google Scholar]
- Rashedi, E.; Nezamabadi-pour, H.; Saryazdi, S. BGSA: Binary Gravitational Search Algorithm. Nat. Comput. 2010, 9, 727–745. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant System: Optimization by a Colony of Cooperating Agents. IEEE Trans. Syst. Man Cybern. Part B Cybern. 1996, 26, 29–41. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D., Jr.; Vecchi, M.P. Optimization by Simulated Annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef]
- Cheng, X.M.; Cao, D.; Li, C.T. Survey of Cooperative Path Planning for Multiple Unmanned Aerial Vehicles. Appl. Mech. Mater. 2014, 668–669, 388–393. [Google Scholar] [CrossRef]
- Babel, L. Coordinated Target Assignment and UAV Path Planning with Timing Constraints. J. Intell. Robot. Syst. 2019, 94, 857–869. [Google Scholar] [CrossRef]
- Xu, Z.W.; Zhang, W.; Ma, F. Task Assignment of Multi-plant Protection UAVs Based on Improved Genetic Algorithm. Ind. Control Comput. 2019, 32, 43–44+46. [Google Scholar]
- Saha, B.; Koshimoto, E.; Quach, C.C.; Hogge, E.F.; Strom, T.H.; Hill, B.L.; Vazquez, S.L.; Goebel, K. Battery Health Management System for Electric UAVs. In Proceedings of the 2011 Aerospace Conference, Big Sky, MT, USA, 5–12 March 2011; pp. 1–9. [Google Scholar]
- Saha, B.; Quach, C.C.; Goebel, K. Optimizing Battery Life for Electric UAVs Using a Bayesian Framework. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012; pp. 1–7. [Google Scholar]
- Nex, F.; Duarte, D.; Steenbeek, A.; Kerle, N. Towards Real-Time Building Damage Mapping with Low-Cost UAV Solutions. Remote Sens. 2019, 11, 287. [Google Scholar] [CrossRef]
- Sofonia, J.J.; Phinn, S.; Roelfsema, C.; Kendoul, F.; Rist, Y. Modelling the Effects of Fundamental UAV Flight Parameters on LiDAR Point Clouds to Facilitate Objectives-Based Planning. ISPRS J. Photogramm. Remote Sens. 2019, 149, 105–118. [Google Scholar] [CrossRef]
- Liu, Z.; Gao, X.; Fu, X. A Cooperative Search and Coverage Algorithm with Controllable Revisit and Connectivity Maintenance for Multiple Unmanned Aerial Vehicles. Sensors 2018, 18, 1472. [Google Scholar] [CrossRef]
- Dewangan, R.K.; Shukla, A.; Godfrey, W.W. Three Dimensional Path Planning Using Grey Wolf Optimizer for UAVs. Appl. Intell. 2019, 49, 2201–2217. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).