
An Alternative Tool for Intra-Row Weed Control in a High-Density Olive Orchard

 , , , ,
, , , ,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Site and Experimental Setup
2.2. Measurements
2.3. Data Analysis
3. Results
3.1. Weed Control
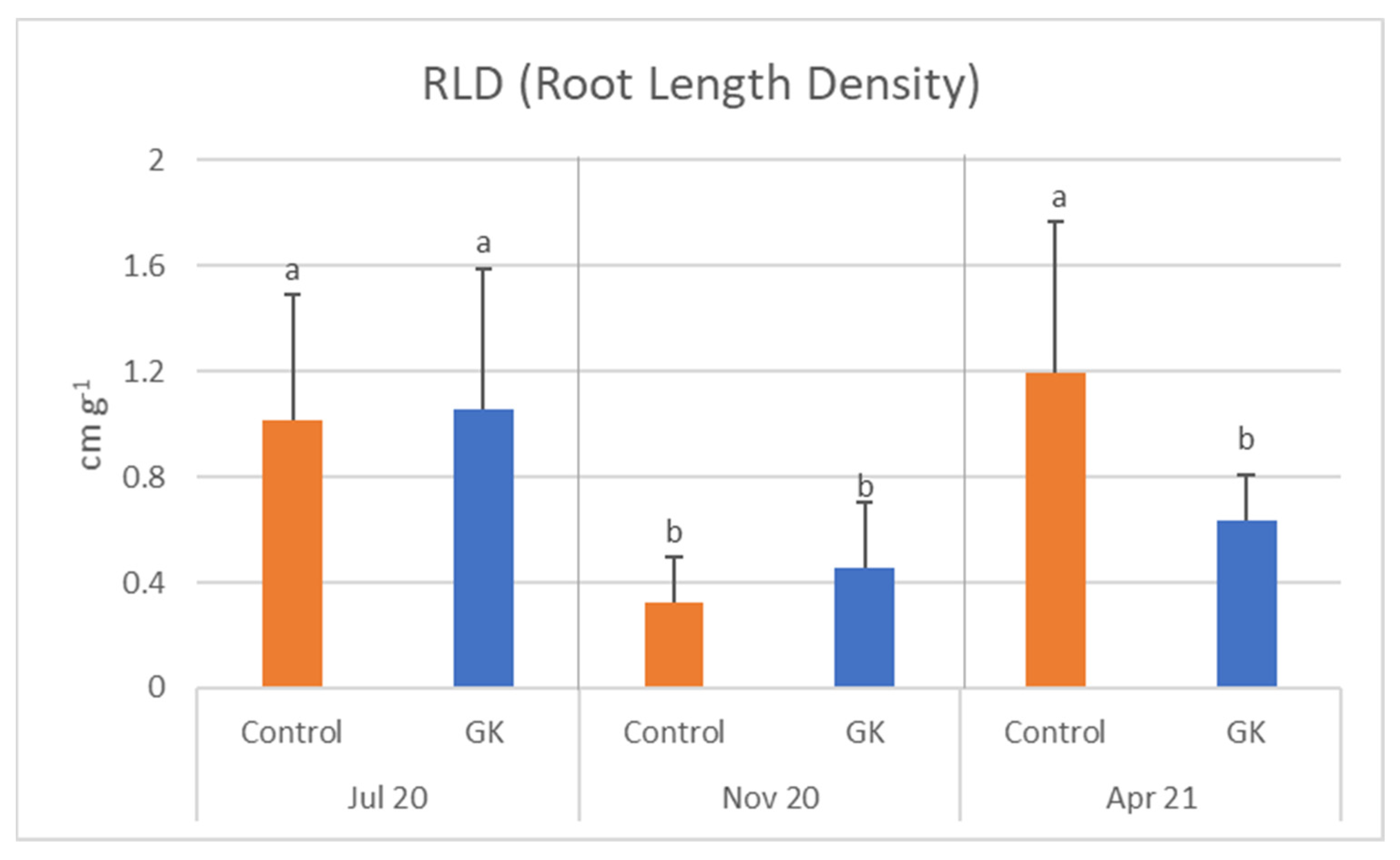
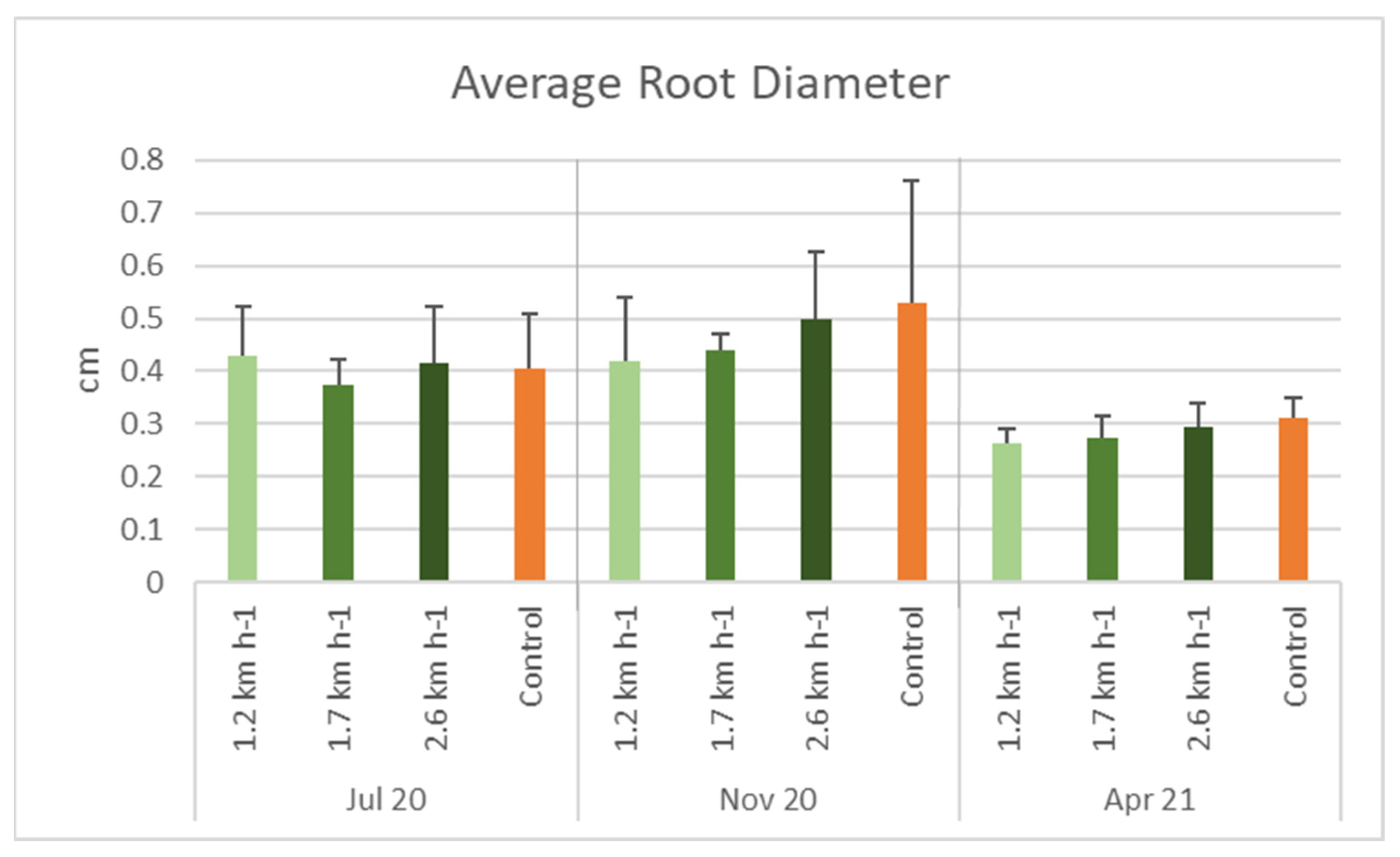
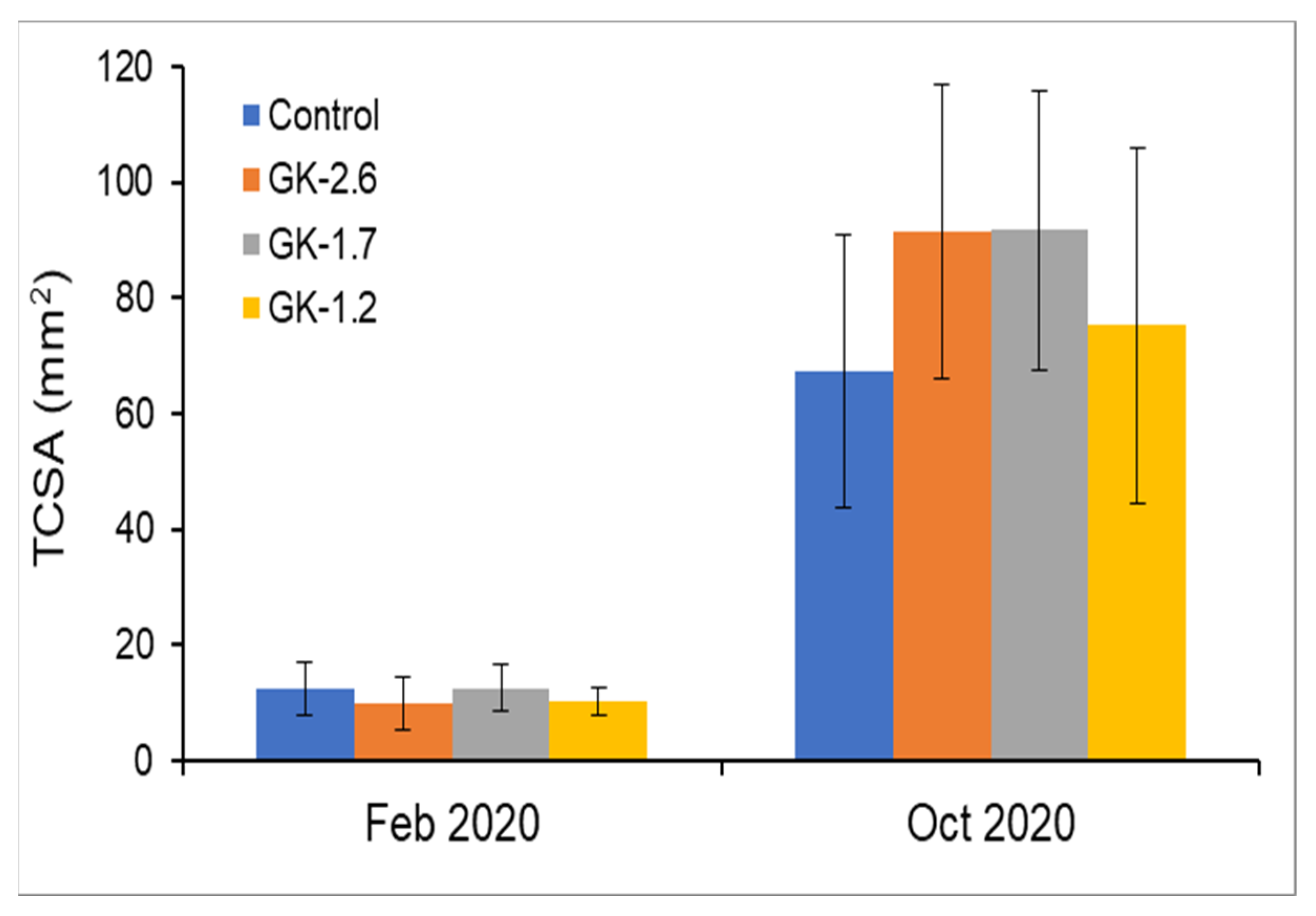
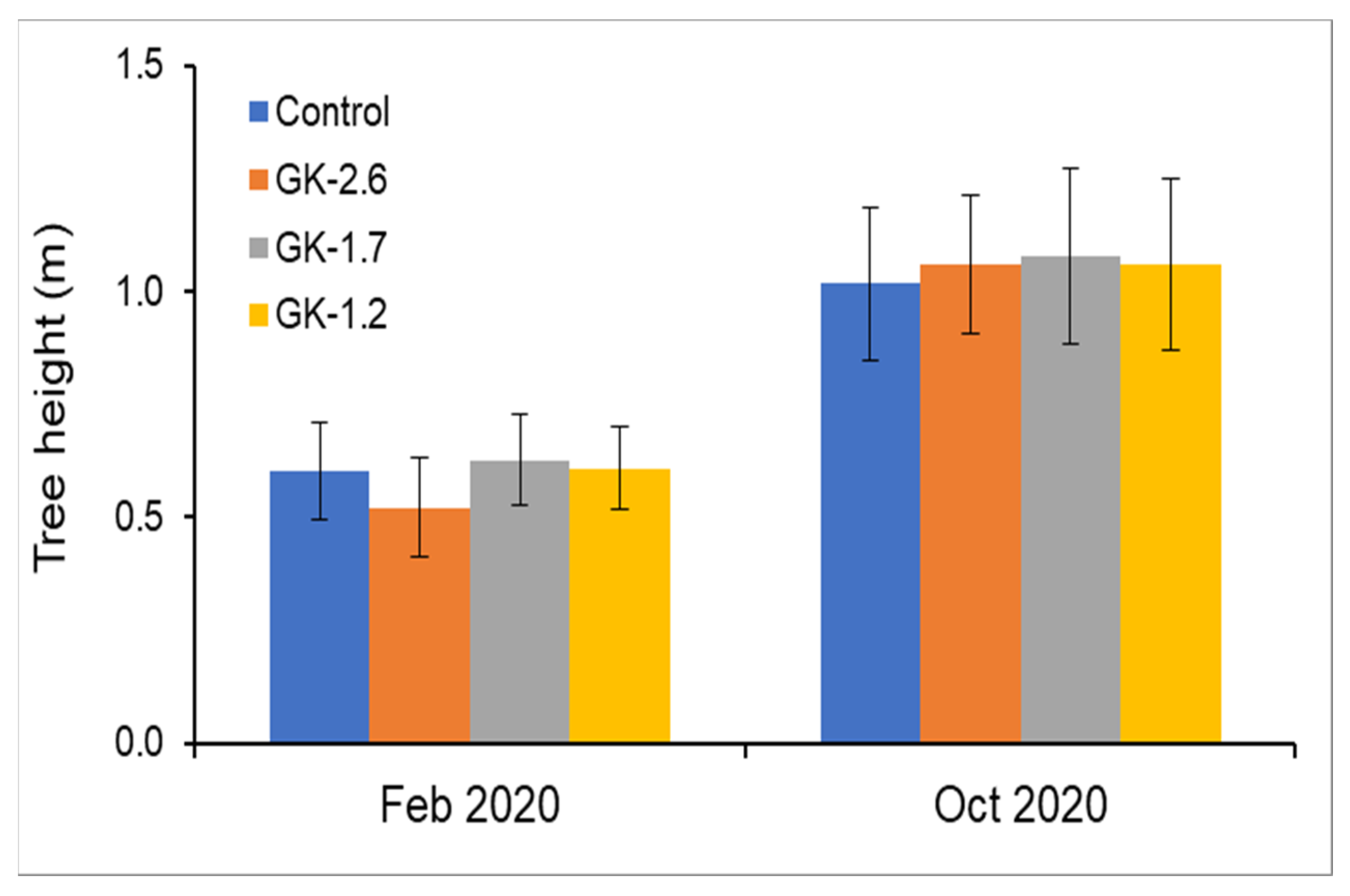
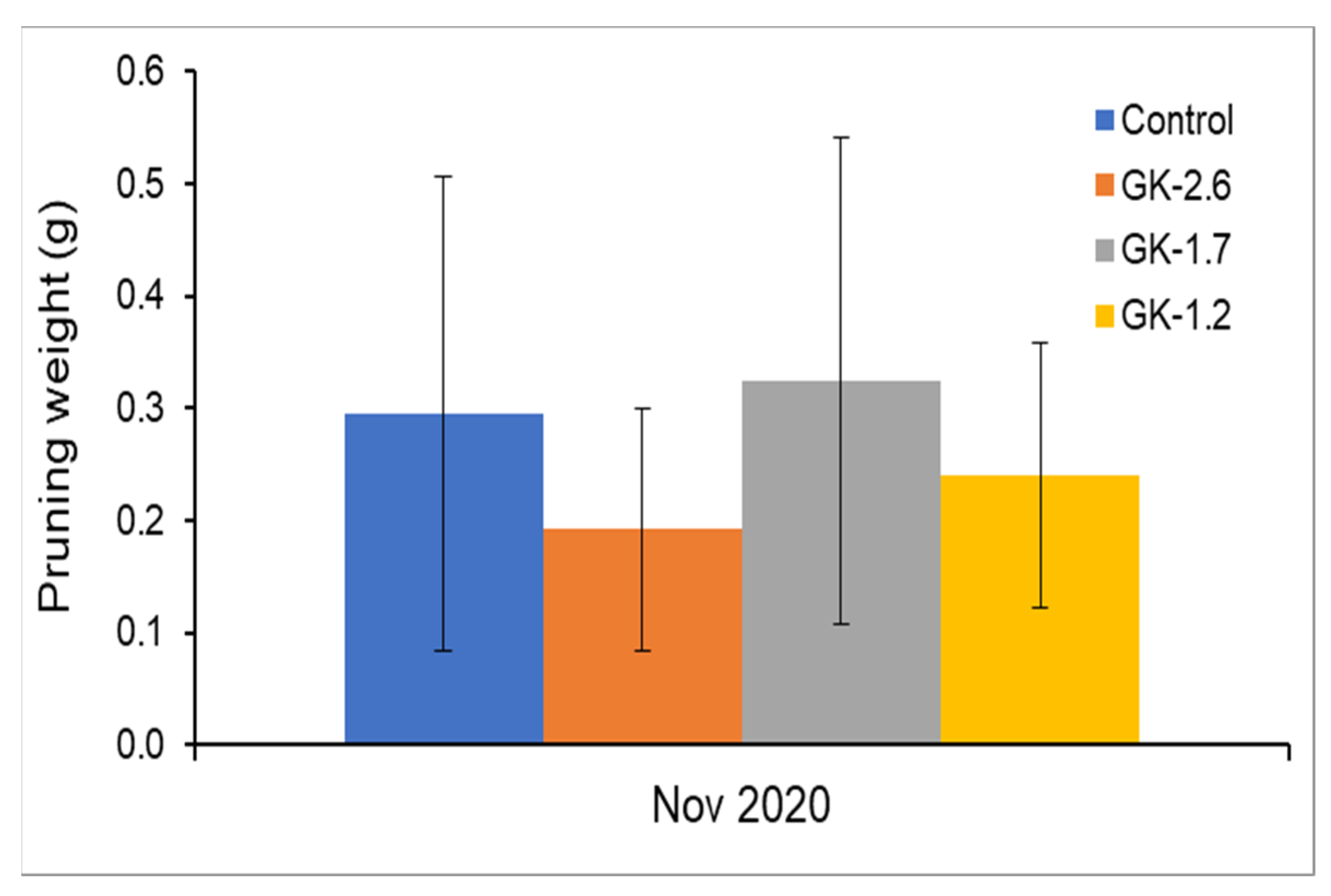
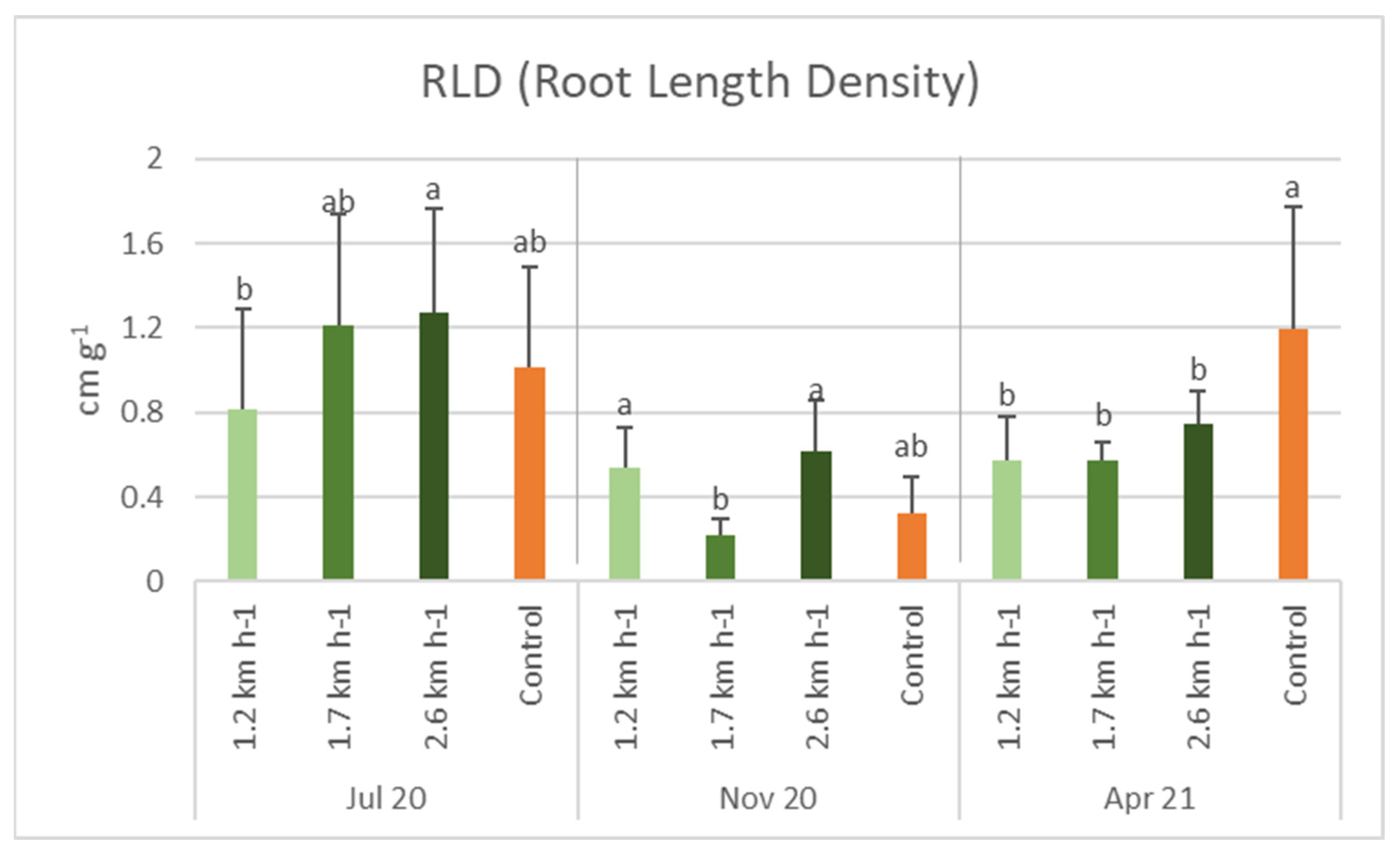
3.2. Olive Tree Growth, Physiological Parameters and Root Development
3.3. Soil Characteristics
4. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Tous, J.; Romero, A.; Plana, J.; Baiges, F. Planting density trial with “Arbequina” olive cultivar in Catalonia (Spain). Acta Hortic. 1999, 474, 177–179. [Google Scholar] [CrossRef]
- Connor, D.J.; Gómez-del-Campo, M.; Rousseaux, M.C.; Searles, P.S. Structure, management and productivity of hedgerow olive orchards: A review. Sci. Hortic. 2014, 169, 71–93. [Google Scholar] [CrossRef]
- Rosati, A.; Paoletti, A.; Caporali, S.; Perri, E. The role of tree architecture in super high density olive orchards. Sci. Hortic. 2013, 161, 24–29. [Google Scholar] [CrossRef]
- Rosati, A.; Paoletti, A.; Al Hariri, R.; Morelli, A.; Famiani, F. Partitioning of dry matter into fruit explains cultivar differences in vigor in young olive (Olea europaea L.) trees. HortScience 2018, 53, 491–495. [Google Scholar] [CrossRef] [Green Version]
- Rosati, A.; Paoletti, A.; Al Hariri, R.; Famiani, F. Fruit production and branching density affect shoot and whole-tree wood to leaf biomass ratio in olive. Tree Physiol. 2018, 38, 1278–1285. [Google Scholar] [CrossRef]
- Assirelli, A.; Romano, E.; Bisaglia, C.; Lodolini, E.M.; Neri, D.; Brambilla, M. Canopy Index Evaluation for Precision Management in an Intensive Olive Orchard. Sustainability 2021, 13, 8266. [Google Scholar] [CrossRef]
- Assirelli, A.; Liberati, P. Simulation modelling of mechanical systems for intra-row weeding in a precision farming approach. Span. J. Agric. Res. 2022, 20, e0201. [Google Scholar] [CrossRef]
- Gucci, R.; Caruso, G.; Bertolla, C.; Urbani, S.; Taticchi, A.; Esposto, S.; Servili, M.; Sifola, M.I.; Pellegrini, S.; Pagliai, M.; et al. Changes of soil properties and tree performace induced by soil management in a high-density olive orchard. Eur. J. Agron. 2012, 41, 18–27. [Google Scholar] [CrossRef]
- Atkinson, D. The distribution and effectiveness of the roots of tree crops. Hortic. Rev. 1980, 2, 424–490. [Google Scholar]
- Tworkoski, T.J.; Glenn, D.M. Yield, shoot and root growth, and physiological responses of mature peach trees to grass competition. HortScience 2001, 36, 1214–1218. [Google Scholar] [CrossRef] [Green Version]
- Moriana, A.; Fereres, E. Plant indicators for scheduling irrigation of young olive trees. Irrig. Sci. 2002, 21, 83–90. [Google Scholar]
- Metzidakis, I.; Martinez-Vilela, A.; Castro Nieto, G.; Basso, B. Intensive olive orchards on sloping land: Good water and pest management are essential. J. Environ. Manag. 2008, 89, 120–128. [Google Scholar] [CrossRef]
- Hammermeister, A.M. Organic weed management in perennial fruits. Sci. Hortic. 2016, 208, 28–42. [Google Scholar] [CrossRef]
- Loddo, D.; Allegri, A.; Bartolini, D.; Sattin, M. Gestione delle infestanti nei fruttiferi: Vite, olivo e altre colture arboree. In Infestanti Emergenti e Riduzione di Disponibilità di Erbicidi, Proceedings of the 21st S.I.R.F.I. Conference, Bari, Italy, 16 ottobre 2018; Vidotto, F., de Paolo, F., Ferrero, A., Eds.; SIRFI: Bari, Italy, 2018; pp. 163–174. [Google Scholar]
- Fracchiolla, M.; Caramia, D.; Lasorella, C.; Montemurro, P. Ground cover management strategies in an Apulian oil-producing olive grove: Agronomic and ecological assessment proposals. Adv. Hortic. Sci. 2013, 27, 44–54. [Google Scholar]
- Toscano, P.; Iannotta, N.; Scalercio, S. Botanical and agricultural aspects: Agronomic techniques and orchard management. In Agricultural and Food Biotechnology of Olea Europaea and Stone Fruits; Muzzalupo, I., Micali, S., Eds.; Bentham Science Publishers: Sharjah, United Arab Emirates, 2015; pp. 2–74. ISBN 978-1-68108-002-4. [Google Scholar]
- Turrini, A.; Caruso, G.; Avio, L.; Gennai, C.; Palla, M.; Agnolucci, M.; Tomei, P.E.; Giovannetti, M.; Gucci, R. Protective green cover enhances soil respiration and native mycorrhizal potential compared with soil tillage in a high-density olive orchard in a long-term study. Appl. Soil Ecol. 2017, 116, 70–78. [Google Scholar] [CrossRef]
- Vignozzi, N.; Agnelli, A.E.; Brandi, G.; Gagnarli, E.; Goggioli, D.; Lagomarsino, A.; Pellegrini, S.; Simoncini, S.; Simoni, S.; Valboa, G.; et al. Soil ecosystem functions in a high-density olive orchard managed by different soil conservation practices. Appl. Soil Ecol. 2019, 134, 64–76. [Google Scholar] [CrossRef]
- Scarfone, A.; Picchio, R.; Del Giudice, A.; Latterini, F.; Mattei, P.; Santangelo, E.; Assirelli, A. Semi-automatic guidance vs. Manual guidance in agriculture: A comparison of work performance in wheat sowing. Electronics 2021, 10, 825. [Google Scholar] [CrossRef]
- Carpio, A.J.; Lora, Á.; Martín-Consuegra, E.; Sánchez-Cuesta, R.; Tortosa, F.S.; Castro, J. The influence of the soil management systems on aboveground and seed bank weed communities in olive orchards. Weed Biol. Manag. 2020, 20, 12–23. [Google Scholar] [CrossRef]
- Del Giudice, A.; Assirelli, A.; Gallucci, F.; Bellacima, R.; Pari, L.; Santangelo, E. Production of energy feedstock from the riparian vegetation of Arundo donax (L.): Suitability of the chopping systems. Ecol. Eng. 2017, 102, 459–467. [Google Scholar] [CrossRef]
- Assirelli, A.; Liberati, P.; Santangelo, E.; Del Giudice, A.; Civitarese, V.; Pari, L. Evaluation of sensors for poplar cutting detection to be used in intra-row weed control machine. Comput. Electron. Agric. 2015, 115, 161–170. [Google Scholar] [CrossRef]
- Camposeo, S.; Vivaldi, G.A. Short-term effects of de-oiled olive pomace mulching application on a young super high-density olive orchard. Sci. Hortic. 2011, 129, 613–621. [Google Scholar] [CrossRef]
- Russo, G.; Vivaldi, G.A.; de Gennaro, B.; Camposeo, S. Environmental sustainability of different soil management techniques in a high-density olive orchard. J. Clean. Prod. 2015, 107, 498–508. [Google Scholar] [CrossRef]
- Assirelli, A.; Santangelo, E.; Spinelli, R.; Acampora, A.; Croce, S.; Civitarese, V.; Pari, L. Mechanization of rhizome extraction in giant reed (Arundo donax L.) nurseries. Appl. Eng. Agric. 2013, 29, 489–494. [Google Scholar] [CrossRef]
- Calderón, M.J.; de Luna, E.; Gómez, J.A.; Hermosín, M.C. Herbicide monitoring in soil, runoff waters and sediments in an olive orchard. Sci. Total Environ. 2016, 569, 416–422. [Google Scholar] [CrossRef]
- Mia, M.J.; Massetani, F.; Murri, G.; Facchi, J.; Monaci, E.; Amadio, L.; Neri, D. Integrated weed management in high density fruit orchards. Agronomy 2020, 10, 1492. [Google Scholar] [CrossRef]
- Sánchez-Moreno, S.; Castro, J.; Alonso-Prados, E.; Alonso-Prados, J.L.; García-Baudín, J.M.; Talavera, M.; Durán-Zuazo, V.H. Tillage and herbicide decrease soil biodiversity in olive orchards. Agron. Sustain. Dev. 2015, 35, 691–700. [Google Scholar] [CrossRef]
- Mia, M.J.; Massetani, F.; Murri, G.; Neri, D. Sustainable alternatives to chemicals for weed control in the orchard—A Review. Hortic. Sci. 2020, 47, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Turner, R.J.; Davies, G.; Moore, H.; Grundy, A.C.; Mead, A. Organic weed management: A review of the current UK farmer perspective. Crop Prot. 2007, 26, 377–382. [Google Scholar] [CrossRef]
- Bokszczanin, K.Ł.; Wrona, D.; Przybyłko, S. Influence of an alternative soil management system to herbicide use on tree vigor, yield, and quality of apple fruit. Agronomy 2021, 11, 58. [Google Scholar] [CrossRef]
- Leblanc, M.; Cloutier, D. La haute technologie au service de la lutte aux mauvaises herbes dans un context d’agriculture biologique. Phytoprotection 2006, 87, 77–81. [Google Scholar] [CrossRef] [Green Version]
- Assirelli, A.; Caracciolo, G.; Cacchi, M.; Sirri, S.; Pallottino, F.; Costa, C. Evaluation of the Detachment Force Needed for the Thinning of Green Peach Fruits. Sustainability 2018, 10, 2291. [Google Scholar] [CrossRef] [Green Version]
- Ishida, Y.; Okamoto, T.; Imou, K.; Kaizu, Y. A study on physical weeding using a water jet. J. Jpn. Soc. Agric. Mach. 2005, 67, 93–99. [Google Scholar]
- Folgelberg, F. Research on Pest Control and Pesticide Reduction in Sweden, Denmark and the Netherlands, Ongoing Work and New Ideas for the Future; Report; Department of Agricultural Engineering, Swedish University of Agricultural Sciences: Alnarp, Sweden, 2001; p. 31. [Google Scholar]
- Fogelberg, F.; Blom, A. Water-jet cutting for weed control. In Proceedings of the 5th EWRS Workshop on Physical Weed Control, Pisa, Italy, 11–13 March 2002; European Weed Research Society: Belgrade, Serbia, 2002; p. 237. [Google Scholar]
- Fogelberg, F. Water-jet cutting of potato tops—Some experiences from Sweden 2003. In Proceedings of the 6th European Weed Research Society Workshop on Physical and Cultural Weed Control, Lillehammer, Norway, 8–10 March 2004; Cloutier, D.C., Ascard, J., Eds.; pp. 127–141. [Google Scholar]
- APIMAI, Associazione Provinciale Imprese di Meccanizzazione Agricola. Tariffario 2020 per la Provincia di Ancona. 2020. Available online: https://www.apima.ancona.it/wpcontent/uploads/2020/06/tariffario_2020.pdf (accessed on 6 February 2022).
- Directive 2009/128/EC of the European Parliament and of the Council. Available online: https://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=OJ:L:2009:309:0071:0086:en:PDF (accessed on 6 February 2022).
- Assirelli, A.; Pignedoli, S. Costo di esercizio delle machine agricole. Cent. Ric. Prod. Anim. 2005, 5, 1–10. [Google Scholar]
- Varani, M.; Molari, G.; Mattetti, M.; Ferrari, A. Performance evaluation of a non-chemical weed control machine for vineyards and orchards operating with high pressure cold water. Acta Hortic. 2021, 1311, 533–540. [Google Scholar] [CrossRef]
- Bossuyt, B.; Honnay, O. Can the seed bank be used for ecological restoration? An overview of seed bank characteristics in European communities. J. Veg. Sci. 2008, 19, 875–884. [Google Scholar] [CrossRef]
- Wood, S.A.; Karp, D.S.; DeClerck, F.; Kremen, C.; Naeem, S.; Palm, C.A. Functional traits in agriculture: Agrobiodiversity and ecosystem services. Trends Ecol. Evol. 2015, 30, 531–539. [Google Scholar] [CrossRef] [Green Version]
- Mézière, D.; Petit, S.; Granger, S.; Biju-Duval, L.; Colbach, N. Developing a set of simulation-based indicators to assess harmfulness and contribution to biodiversity of weed communities in cropping systems. Ecol. Indic. 2015, 48, 157–170. [Google Scholar] [CrossRef]
- Neri, D.; Polverigiani, S.; Zucchini, M.; Giorgi, V.; Marchionni, F.; Mia, M.J. Strawberry living mulching in an organic vineyard. Agronomy 2021, 11, 1643. [Google Scholar] [CrossRef]
- Mia Md, J.; Furmanczyk, E.M.; Golian, J.; Kwiatkowska, J.; Malusá, E.; Neri, D. Living Mulch with Selected Herbs for Soil Management in Organic Apple Orchards. Horticulturae 2021, 7, 59. [Google Scholar] [CrossRef]
- Las Casas, G.; Ciaccia, C.; Iovino, V.; Ferlito, F.; Torrisi, B.; Lodolini, E.M.; Giuffrida, A.; Catania, R.; Nicolosi, E.; Bella, S. Effects of Different Inter-Row Soil Management and Intra-Row Living Mulch on Spontaneous Flora, Beneficial Insects, and Growth of Young Olive Trees in Southern Italy. Plants 2022, 11, 545. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| Grass Killer | Water pressure (bar) | 1000 |
| Cylinder head diameter (cm) | 38 | |
| Number of nozzles | 4 | |
| Diameter of nozzles (mm) | 0.16 | |
| Rotation speed of the nozzles (rpm) | 600 | |
| Work width (cm) | 38 | |
| Water flow (l min−1) | 0.5 | |
| Working speed (km h−1) | 1.2–1.7–2.6 | |
| Hoeing machine | Engine power (kW) | 35 |
| Working width (cm) | 80 | |
| Rotation speed (rpm) | 180 | |
| Tillage depth (cm) | 10 | |
| Working speed (km h−1) | 3 |
| Total Cover (%) | R | E | Perennials (%) | ||
|---|---|---|---|---|---|
| Before weed control | Control | 100 | 6.4 | 0.73 | 19.4 |
| GK 1.2 | 90.0 | 6.0 | 0.82 | 13.3 | |
| GK 1.7 | 100 | 9.0 | 0.70 | 13.2 | |
| GK 2.6 | 100 | 7.3 | 0.68 | 13.5 | |
| Mean | 98.3 | 6.9 | 0.73 | 16.4 | |
| Significance | n.s. | n.s. | n.s. | n.s. | |
| After weed control | Control | 0.0 | - | - | - |
| GK 1.2 | 30.7 b | 3.67 b | 0.56 b | 4.17 b | |
| GK 1.7 | 26.0 b | 5.00 ab | 0.85 a | 0.00 c | |
| GK 2.6 | 60.0 a | 8.33 a | 0.88 a | 15.7 a | |
| Mean | 38.9 | 5.67 | 0.76 | 6.61 | |
| Significance | * | * | * | *** |
| Total Cover (%) | R | E | Perennials (%) | ||
|---|---|---|---|---|---|
| 35 DAT | Control | 9.67 d | 4.7 | 0.80 a | 19.2 a |
| GK 1.2 | 41.0 c | 3.7 | 0.85 a | 8.33 a | |
| GK 1.7 | 61.7 b | 5.3 | 0.56 b | 0.13 b | |
| GK 2.6 | 80.0 a | 5.3 | 0.85 a | 9.52 a | |
| Mean | 35.3 | 4.7 | 0.78 | 12.6 | |
| Significance | * | n.s. | ** | * | |
| 69 DAT | Control | 14.0 d | 4.6 | 0.85 a | 15.0 |
| GK 1.2 | 35.7 c | 6.7 | 0.91 a | 14.8 | |
| GK 1.7 | 66.7 b | 8.7 | 0.61 b | 12.1 | |
| GK 2.6 | 91.0 a | 8.7 | 0.83 a | 9.77 | |
| Mean | 39.2 | 6.3 | 0.82 | 13.6 | |
| Significance | ** | n.s. | *** | n.s. | |
| 147 DAT | Control | 37.6 c | 7.6 | 0.85 | 8.21 |
| GK 1.2 | 68.3 b | 7.0 | 0.88 | 4.05 | |
| GK 1.7 | 87.3 ab | 8.7 | 0.82 | 11.4 | |
| GK 2.6 | 95.0 a | 7.3 | 0.83 | 5.14 | |
| Mean | 60.6 | 7.6 | 0.85 | 7.54 | |
| Significance | ** | n.s. | n.s. | n.s. |
| RWC (%) | Net Photosynthetic Rate (µmol CO2 m−2 s−1) | Stomatal Conductance (mmol H2O m−2 s−1) | CO2 Intercellular Concentration (µmol CO2 mol−1) | Transpiration Rate (mmol H2O m−2 s−1) | |
|---|---|---|---|---|---|
| Control | 60.27 | 23.5 ± 6.92 | 0.36 ± 0.196 | 244 ± 40.6 | 6.18 ± 2.582 |
| Grass Killer | 46.69 | 22.5 ± 0.98 | 0.33 ± 0.058 | 253 ± 12.1 | 5.94 ± 0.198 |
| 20 July 2020 | 19 January 2021 | |||
|---|---|---|---|---|
| Soil Temperature (°C) | Soil Moisture (%) | Soil Temperature (°C) | Soil Moisture (%) | |
| Control | 27.4 ± 0.33 a | 11.7 ± 1.72 a | 5.13 ± 0.67 a | 22.4 ± 4.72 a |
| Grass Killer | 27.3 ± 0.19 a | 10.5 ± 0.43 a | 5.54 ± 0.27 a | 13.2 ± 6.72 b |
| Working Speed (km h−1) | Productivity (ha h−1) | Water Consumption (L ha−1) | Cost (Euros ha−1) | |
|---|---|---|---|---|
| Control | 3.0 | 0.50 | 0.00 | 169.00 |
| GK-1.2 | 1.2 | 0.21 | 1345 | 261.90 |
| GK-1.7 | 1.7 | 0.30 | 950 | 183.33 |
| GK-2.6 | 2.6 | 0.46 | 621 | 119.57 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Assirelli, A.; Ciaccia, C.; Giorgi, V.; Zucchini, M.; Neri, D.; Lodolini, E.M. An Alternative Tool for Intra-Row Weed Control in a High-Density Olive Orchard. Agronomy 2022, 12, 605. https://doi.org/10.3390/agronomy12030605
Assirelli A, Ciaccia C, Giorgi V, Zucchini M, Neri D, Lodolini EM. An Alternative Tool for Intra-Row Weed Control in a High-Density Olive Orchard. Agronomy. 2022; 12(3):605. https://doi.org/10.3390/agronomy12030605
Chicago/Turabian StyleAssirelli, Alberto, Corrado Ciaccia, Veronica Giorgi, Matteo Zucchini, Davide Neri, and Enrico Maria Lodolini. 2022. "An Alternative Tool for Intra-Row Weed Control in a High-Density Olive Orchard" Agronomy 12, no. 3: 605. https://doi.org/10.3390/agronomy12030605
APA StyleAssirelli, A., Ciaccia, C., Giorgi, V., Zucchini, M., Neri, D., & Lodolini, E. M. (2022). An Alternative Tool for Intra-Row Weed Control in a High-Density Olive Orchard. Agronomy, 12(3), 605. https://doi.org/10.3390/agronomy12030605