
A Path Optimization Algorithm for Multiple Unmanned Tractors in Peach Orchard Management

Abstract
:1. Introduction
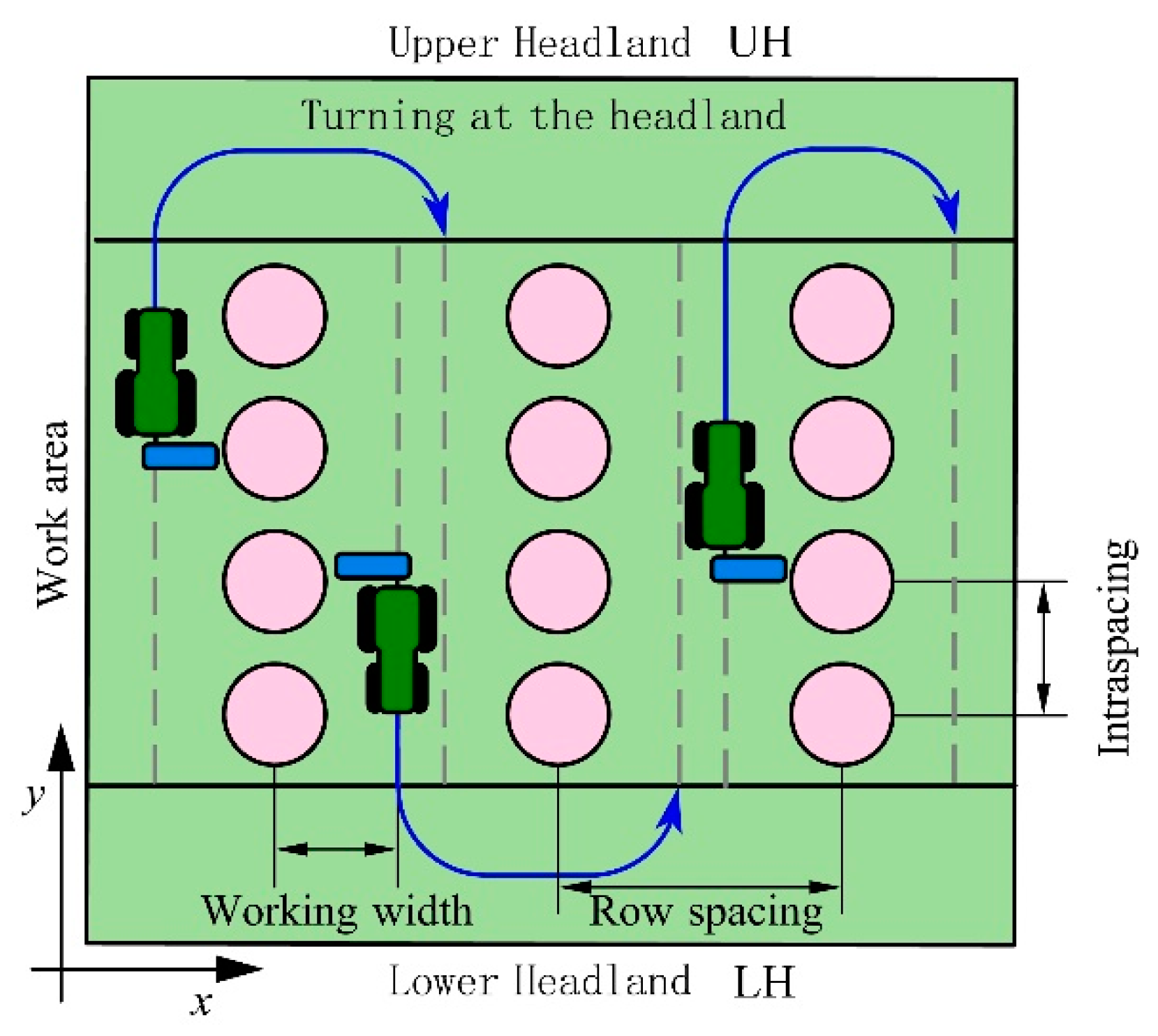
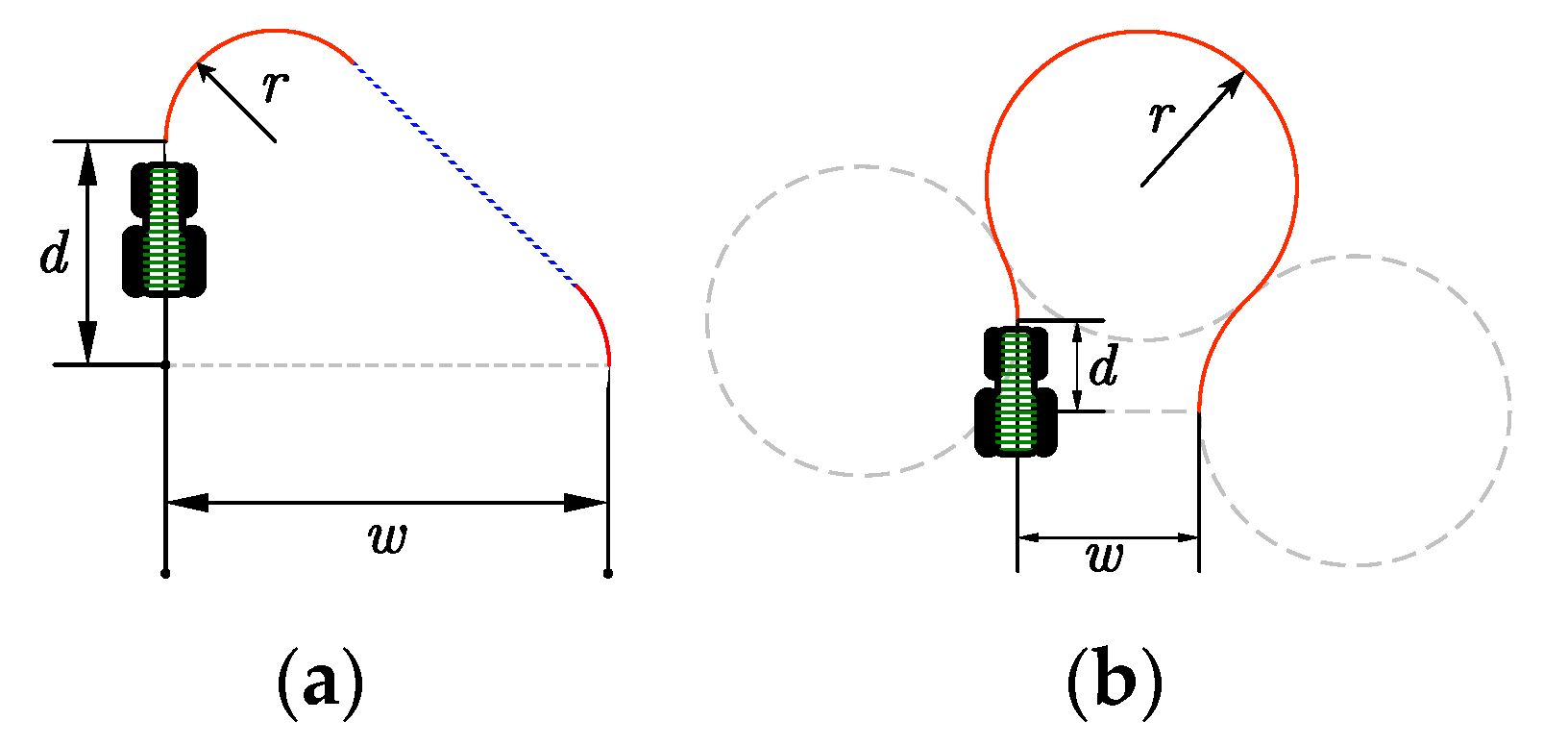
2. Path Optimization Model of Unmanned Tractor
Optimization Model of Minimum Operating Time for Unmanned Tractor
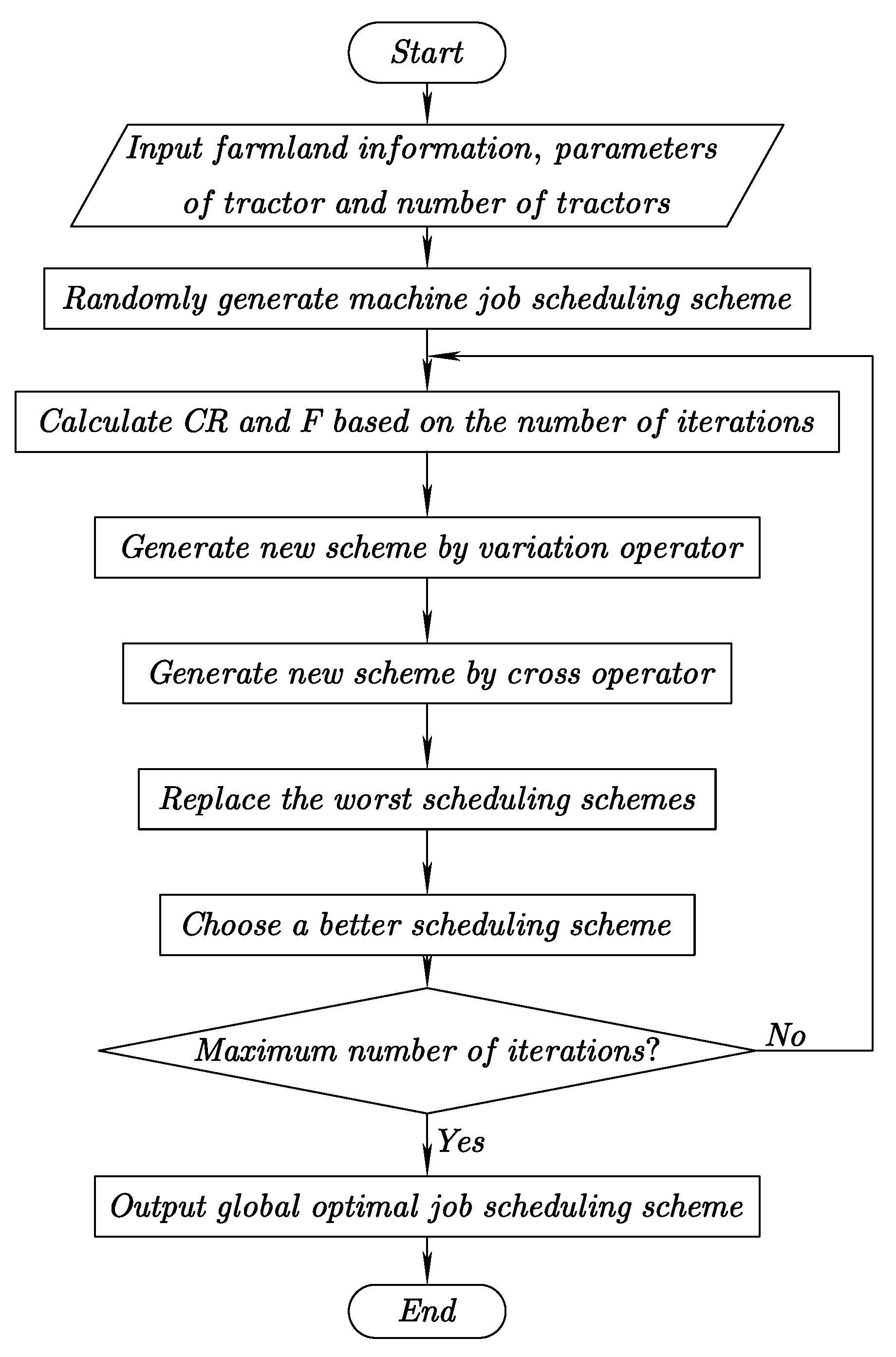
3. Multi-Tractor Path Optimization Algorithm
3.1. Differential Evolution Algorithm
3.2. Improved Differential Evolution Algorithm
3.2.1. Mutation Operator
3.2.2. Dynamic Parameters
3.2.3. Elite Selection
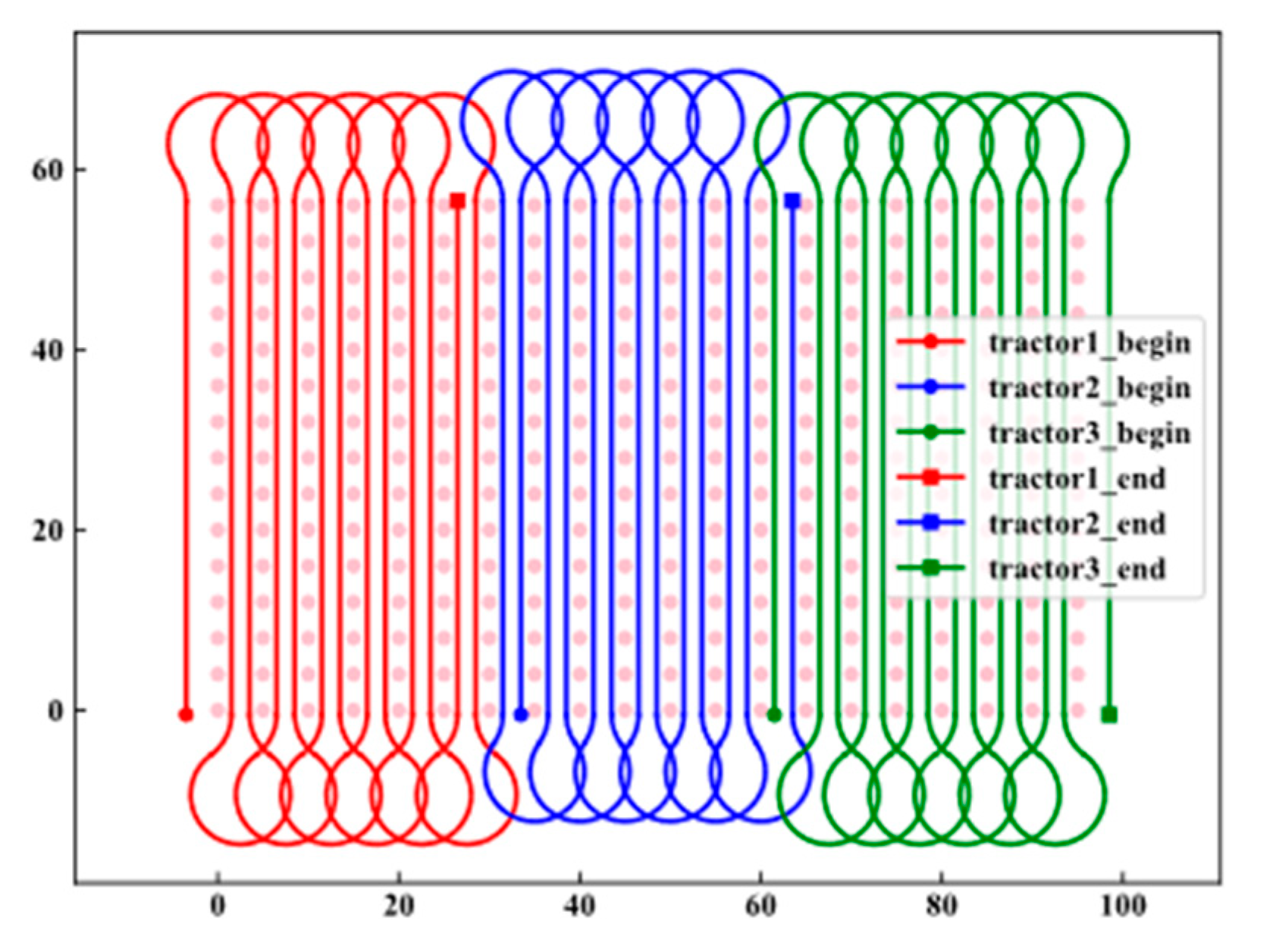
4. Experiment and Analysis
4.1. Analysis of Experimental Results
4.1.1. Performance Comparison of Elite Selection Algorithm
4.1.2. Comparison with Block Operation
4.1.3. Comparison of Effective Operation Ability
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gao, G.; Xiao, K.; Jia, Y. A spraying path planning algorithm based on colour-depth fusion segmentation in peach orchards. Comput. Electron. Agric. 2020, 173, 105412. [Google Scholar] [CrossRef]
- Seyyedhasani, H. Using the Vehicle Routing Problem (VRP) to Provide Logistics Solutions in Agriculture. Ph.D. Thesis, University of Kentucky, Lexington, KY, USA, 2017. [Google Scholar]
- Moorehead, S.J.; Wellington, C.K.; Gilmore, B.J.; Vallespi, C. Automating orchards: A system of autonomous tractors for orchard maintenance. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshop on Agricultural Robots, Algarve, Portugal, 7–12 October 2012. [Google Scholar]
- Spekken, M.; de Bruin, S. Optimized routing on agricultural fields by minimizing maneuvering and servicing time. Precis. Agric. 2013, 14, 224–244. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Vougioukas, S.G. Minimising the non-working distance travelled by machines operating in a headland field pattern. Biosyst. Eng. 2008, 101, 1–12. [Google Scholar] [CrossRef]
- Nazarahari, M.; Khanmirza, E.; Doostie, S. Multi-objective multi-robot path planning in continuous environment using an enhanced genetic algorithm. Expert Syst. Appl. 2019, 115, 106–120. [Google Scholar] [CrossRef]
- Sch, A.; Fle, T.R.; Mohamed, S.; Uchiyama, N.; Sawodny, O. Coverage path planning for mobile robots using genetic algorithm with energy optimization. In Proceedings of the 2016 International Electronics Symposium (IES), Denpasar, Indonesia, 29–30 September 2016. [Google Scholar]
- Ryerson, A.F.; Zhang, Q. Vehicle path planning for complete field coverage using genetic algorithms. Agric. Eng. Int. CIGR J. 2007, IX, 1–11. [Google Scholar]
- Conesa-Muñoz, J.; Pajares, G.; Ribeiro, A. Mix-opt: A new route operator for optimal coverage path planning for a fleet in an agricultural environment. Expert Syst. Appl. 2016, 54, 364–378. [Google Scholar] [CrossRef]
- Conesa-Mu, N.; Oz, J.; Bengochea-Guevara, J.M.; Andujar, D.; Ribeiro, A. Efficient distribution of a fleet of heterogeneous vehicles in agriculture: A practical approach to multi-path planning. In Proceedings of the 2015 IEEE International Conference on Autonomous Robot Systems and Competitions, Vila Real, Portugal, 8–10 April 2015. [Google Scholar]
- Bakhtiari, A.A.; Navid, H.; Mehri, J.; Bochtis, D.D. Optimal route planning of agricultural field operations using ant colony optimization. Agric. Eng. Int. CIGR J. 2012, 13, 1–10. [Google Scholar]
- Moghadam, K.E.; Vahdanjoo, M.; Jensen, A.L.; Bochtis, D.D. An Arable Field for Benchmarking of Metaheuristic Algorithms for Capacitated Coverage Path Planning Problems. Agronomy 2020, 10, 1454. [Google Scholar] [CrossRef]
- Khajepour, A.; Sheikhmohammady, M.; Nikbakhsh, E. Field path planning using capacitated arc routing problem. Comput. Electron. Agric. 2020, 173, 105401. [Google Scholar] [CrossRef]
- Utamima, A.; Reiners, T.; Ansaripoor, A.H. Optimisation of agricultural routing planning in field logistics with Evolutionary Hybrid Neighbourhood Search. Biosyst. Eng. 2019, 184, 166–180. [Google Scholar] [CrossRef]
- Zhu, X.; Ding, Y.; Cai, X.; Wang, H.; Zhang, X. Optimal schedule for agricultural machinery using an improved Immune-Tabu Search Algorithm. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017. [Google Scholar]
- Wang, B.; Li, S.; Guo, J.; Chen, Q. Car-like mobile robot path planning in rough terrain using multi-objective particle swarm optimization algorithm. Neurocomputing 2018, 282, 42–51. [Google Scholar] [CrossRef]
- Seyyedhasani, H.; Dvorak, J.S. Using the Vehicle Routing Problem to Reduce Field Completion Times with Multiple Machines. Comput. Electron. Agric. 2016, 134, 142–150. [Google Scholar] [CrossRef] [Green Version]
- Seyyedhasani, H.; Dvorak, J.S.; Roemmele, E. Routing algorithm selection for field coverage planning based on field shape and fleet size. Comput. Electron. Agric. 2019, 156, 523–529. [Google Scholar] [CrossRef]
- Utamima, A.; Reiners, T.; Ansaripoor, A.H. Evolutionary estimation of distribution algorithm for agricultural routing planning in field logistics. Procedia Comput. Sci. 2019, 161, 560–567. [Google Scholar] [CrossRef]
- Fabre, S.; Soures, P.; Taix, M.; Cordesses, L. Farmwork path planning for field coverage with minimum overlapping. In Proceedings of the ETFA 2001 8th International Conference on Emerging Technologies and Factory Automation, Antibes-Juan les Pins, France, 15–18 October 2001. [Google Scholar]
- Jensen, M.F.; Bochtis, D.S.O.; Rensen, C.G. Coverage planning for capacitated field operations, part II: Optimisation. Biosyst. Eng. 2015, 139, 149–164. [Google Scholar] [CrossRef]
- Muthukumaran, S.; Ganesan, M.; Dhanasekar, J.; Loganathan, G.B. Path Planning Optimization for Agricultural Spraying Robots Using Hybrid Dragonfly–Cuckoo Search Algorithm. Alinteri J. Agric. Sci. 2021, 36, 2564–7814. [Google Scholar] [CrossRef]
- Postmes, J.; Botteghi, N.; Sirmacek, B.; Kamilaris, A. A System for Efficient Path Planning and Target Assignment for Robotic Swarms in Agriculture. In Proceedings of the IoT ‘21, 11th International Conference on the Internet of Things, St.Gallen, Switzerland, 8–12 November 2021; pp. 158–164. [Google Scholar]
- Oksanen, T.; Visala, A. Coverage path planning algorithms for agricultural field machines. J. Field Robot. 2009, 26, 651–668. [Google Scholar] [CrossRef]
- Bochtis, D.; Griepentrog, H.W.; Vougioukas, S.; Busato, P.; Berruto, R.; Zhou, K. Route planning for orchard operations. Comput. Electron. Agric. 2015, 113, 51–60. [Google Scholar] [CrossRef]
- Jensen, M.A.F.; Bochtis, D.; Sørensen, C.G.; Blas, M.R.; Lykkegaard, K.L. In-field and inter-field path planning for agricultural transport units. Comput. Ind. Eng. 2012, 63, 1054–1061. [Google Scholar] [CrossRef]
- Utamima, A.; Reiners, T.; Ansaripoor, A.; Seyyedhasani, H. Contemporary Approaches and Strategies for Applied Logistics, 10th ed.; IGI Global; University of Otago: Dunedin, New Zealand, 2018; pp. 261–283. [Google Scholar]
- Cheikhrouhou, O.; Khoufi, I. A comprehensive survey on the Multiple Traveling Salesman Problem: Applications, approaches and taxonomy. Comput. Sci. Rev. 2021, 40, 100369. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Meng, Z.; Liu, H.; Wang, H.; Fu, H. Optimal path planning for agricultural machinery. Trans. Chin. Soc. Agric. Mach. 2012, 43, 147–152. [Google Scholar]
- Mi, M.; Huifeng, X.; Ming, Z.; Yu, G. An improved differential evolution algorithm for TSP problem. In Proceedings of the 2010 International Conference on Intelligent Computation Technology and Automation, Changsha, China, 11–12 May 2010. [Google Scholar]
- Wang, X.; Xu, G. Hybrid differential evolution algorithm for traveling salesman problem. Procedia Eng. 2011, 15, 2716–2720. [Google Scholar] [CrossRef] [Green Version]
- Mei, M.; Xue, H.F.; Zhong, M.; Gu, Y. An improved differential evolution algorithm for TSP. Inf. Technol. 2011, 15, 2716–2720. [Google Scholar]
- Brest, J.; Boškovič, B.; Žumer, V. An improved self-adaptive differential evolution algorithm in single objective constrained real-parameter optimization. In Proceedings of the IEEE Congress on Evolutionary Computation, Barcelona, Spain, 18–23 July 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Zhang, L. Multiple Mutation Strategy of Adaptive Differential Evolution Algorithm Research. Int. Core J. Eng. 2021, 7, 1–9. [Google Scholar]
- Qin, A.K.; Huang, V.L.; Suganthan, P.N. Differential evolution Algorithm with strategy adaptation for global numerical optimization. IEEE Trans. Evol. Comput. 2009, 13, 398–417. [Google Scholar] [CrossRef]
- Seyyedhasani, H.; Dvorak, J.S. Reducing field work time using fleet routing optimization. Biosyst. Eng. 2018, 169, 1–10. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Agricultural Machinery | Total Turning Time | Total Operating Time | ||||
|---|---|---|---|---|---|---|
| TTTOn(s) | TTTIn(s) | TTTDRn(%) | TOTOn(s) | TOTIn(s) | TOTDRn(%) | |
| 1 | 558.29 | 545.95 | 2.21 | 2838.29 | 2825.95 | 0.44 |
| 2 | 507.00 | 490.80 | 3.19 | 1417.89 | 1388.25 | 2.09 |
| 3 | 541.10 | 495.97 | 8.34 | 954.71 | 945.11 | 1.01 |
| 4 | 509.67 | 490.97 | 3.67 | 703.96 | 696.70 | 1.03 |
| 5 | 458.38 | 468.63 | 2.19 | 556.68 | 547.68 | 0.41 |
| 6 | 467.13 | 465.03 | 0.45 | 487.44 | 486.24 | 0.24 |
| Mean | 506.93 | 492.89 | 3.34 | 1159.83 | 1148.32 | 0.87 |
| Peach Orchard | Number of Tractors | Total Turning Time | Total Operating Time | ||||
|---|---|---|---|---|---|---|---|
| TTTOn/s | TTTIn/s | TTTDRn/% | TOTOn/s | TOTIn/s | TOTDRn/% | ||
| Rectangle | 1 | 839.3 | 536.8 | 36.0 | 3119.3 | 2816.8 | 9.7 |
| 2 | 816.9 | 523.6 | 35.9 | 1548.4 | 1414.5 | 8.7 | |
| 3 | 794.5 | 492.5 | 38.0 | 1077.2 | 956.9 | 11.2 | |
| 4 | 772.0 | 489.7 | 36.6 | 763.0 | 698.4 | 8.5 | |
| 5 | 749.6 | 495.5 | 33.9 | 605.9 | 563.9 | 6.9 | |
| 6 | 732.5 | 468.4 | 36.1 | 528.3 | 488.3 | 7.6 | |
| Mean | 784.1 | 501.1 | 36.1 | 1273.7 | 1156.5 | 8.8 | |
| Trapezoid | 1 | 839.3 | 560.5 | 33.2 | 2799.3 | 2520.5 | 10.0 |
| 2 | 816.9 | 524.4 | 35.8 | 1484.4 | 1257.1 | 15.3 | |
| 3 | 794.5 | 527.7 | 33.6 | 1053.2 | 838.5 | 20.4 | |
| 4 | 772.0 | 530.9 | 31.2 | 755.0 | 633.5 | 16.1 | |
| 5 | 749.6 | 490.8 | 34.5 | 605.9 | 507.8 | 16.2 | |
| 6 | 732.1 | 506.0 | 30.9 | 528.3 | 434.2 | 17.8 | |
| Mean | 784.1 | 523.4 | 33.2 | 1204.4 | 1031.9 | 16.0 | |
| Irregular | 1 | 837.8 | 572.0 | 31.7 | 2477.8 | 2212.0 | 10.7 |
| 2 | 815.4 | 522.2 | 36.0 | 1227.7 | 1087.4 | 11.4 | |
| 3 | 793.1 | 520.8 | 34.3 | 852.8 | 751.5 | 11.9 | |
| 4 | 770.5 | 510.9 | 33.7 | 602.6 | 546.7 | 9.3 | |
| 5 | 748.8 | 501.7 | 33.0 | 477.9 | 433.4 | 9.3 | |
| 6 | 731.2 | 463.9 | 36.6 | 416.1 | 368.7 | 11.4 | |
| Mean | 782.8 | 515.2 | 34.2 | 1009.2 | 899.9 | 10.7 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, X.; Lai, Y.; Wu, H. A Path Optimization Algorithm for Multiple Unmanned Tractors in Peach Orchard Management. Agronomy 2022, 12, 856. https://doi.org/10.3390/agronomy12040856
Han X, Lai Y, Wu H. A Path Optimization Algorithm for Multiple Unmanned Tractors in Peach Orchard Management. Agronomy. 2022; 12(4):856. https://doi.org/10.3390/agronomy12040856
Chicago/Turabian StyleHan, Xiao, Yanliang Lai, and Huarui Wu. 2022. "A Path Optimization Algorithm for Multiple Unmanned Tractors in Peach Orchard Management" Agronomy 12, no. 4: 856. https://doi.org/10.3390/agronomy12040856
APA StyleHan, X., Lai, Y., & Wu, H. (2022). A Path Optimization Algorithm for Multiple Unmanned Tractors in Peach Orchard Management. Agronomy, 12(4), 856. https://doi.org/10.3390/agronomy12040856