
Autonomous Robotic System for Pumpkin Harvesting



Abstract
:1. Introduction
2. Materials and Methods
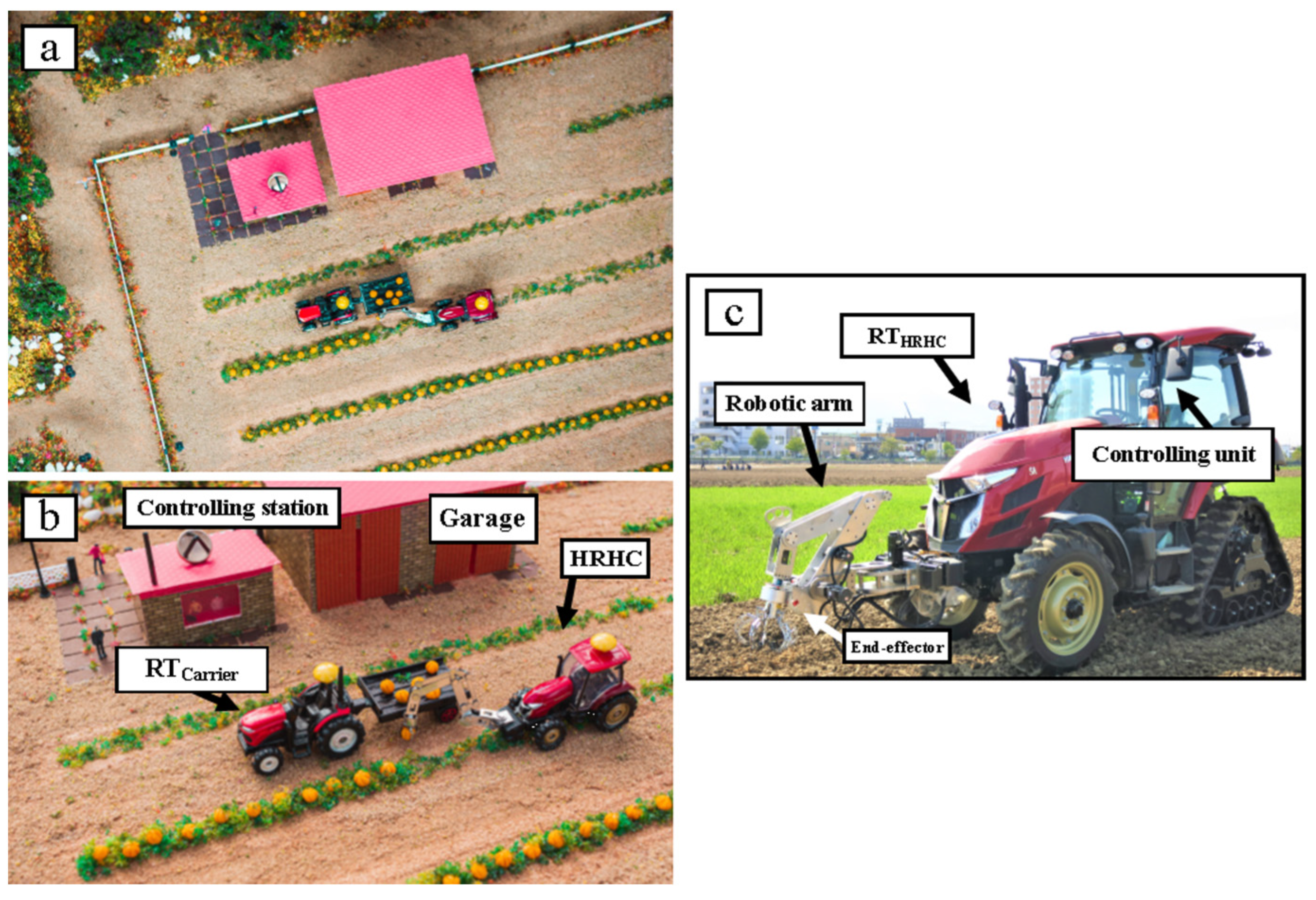
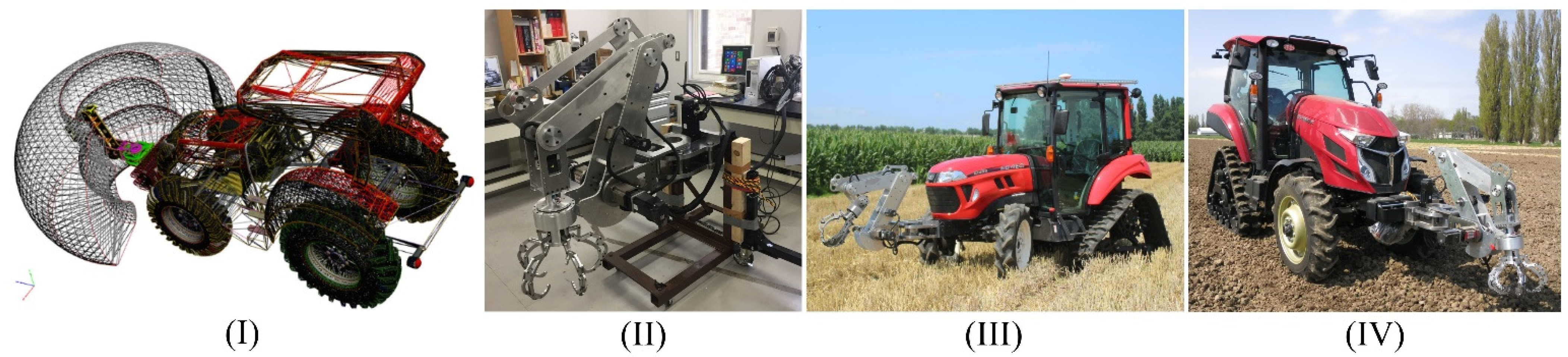
2.1. The Designed and Developed a Robotic System
2.2. Performance Evaluations
2.2.1. Workspace
2.2.2. System Resolution
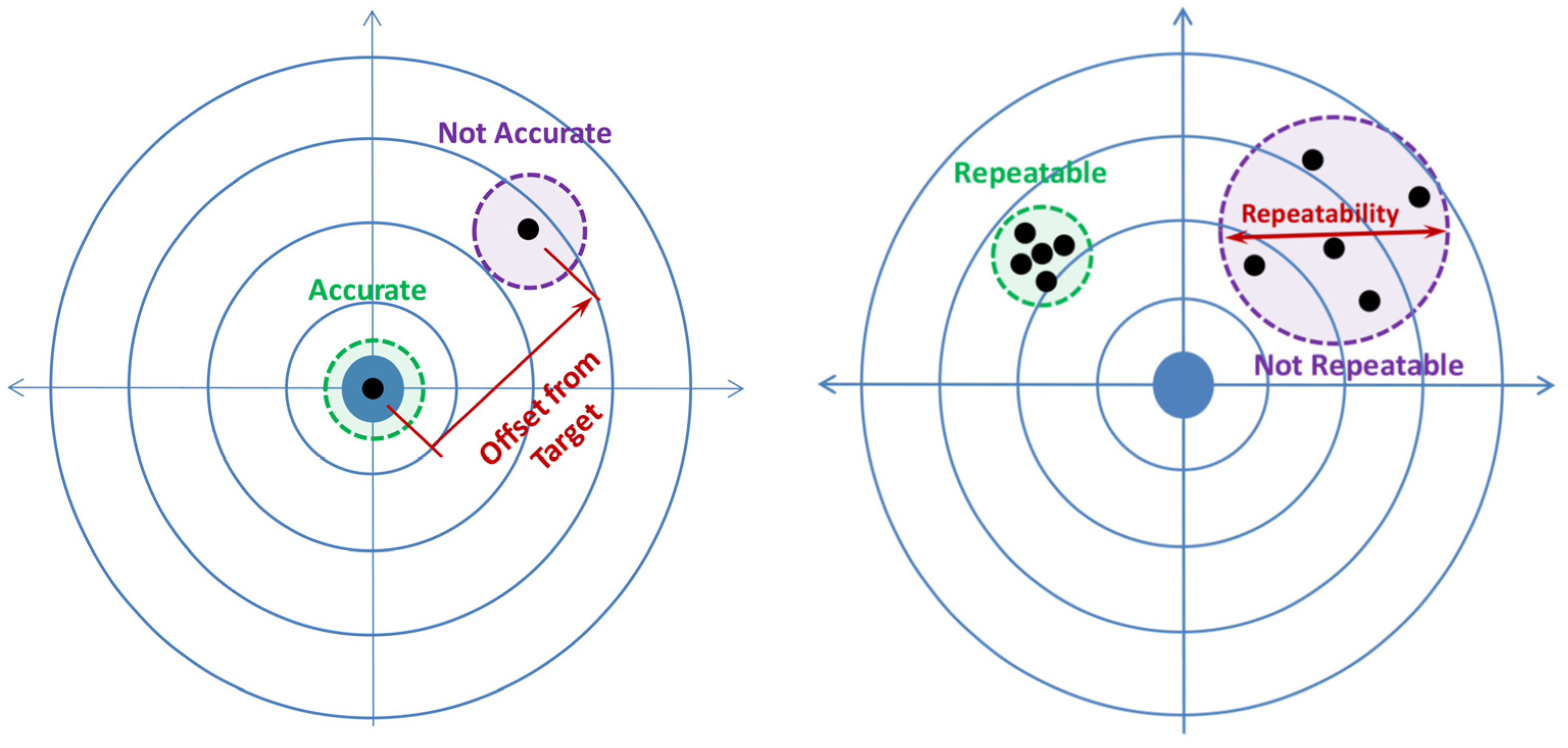
2.2.3. Accuracy and Repeatability
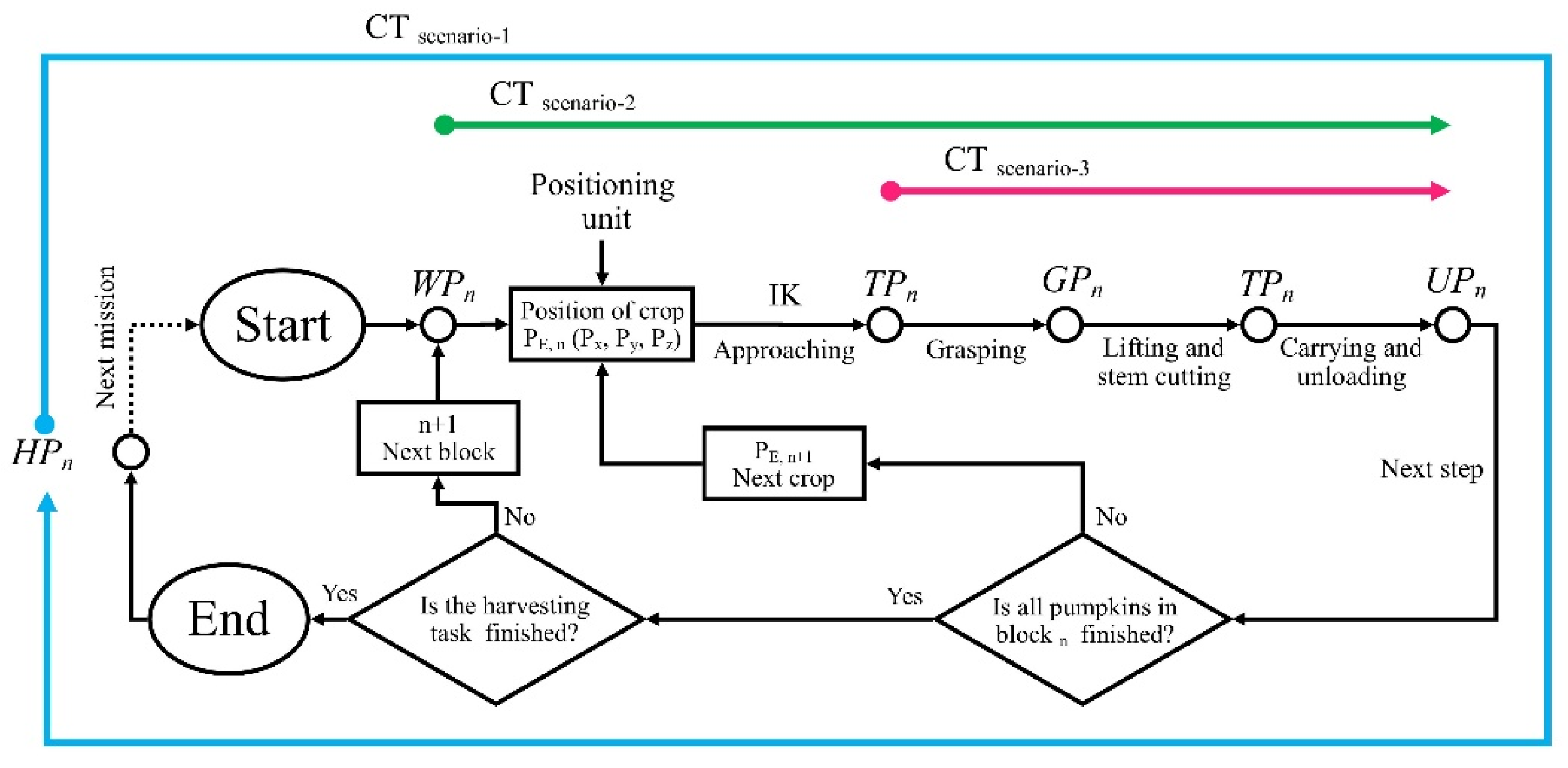
2.2.4. Harvesting Performance Indicators
3. Results and Discussion
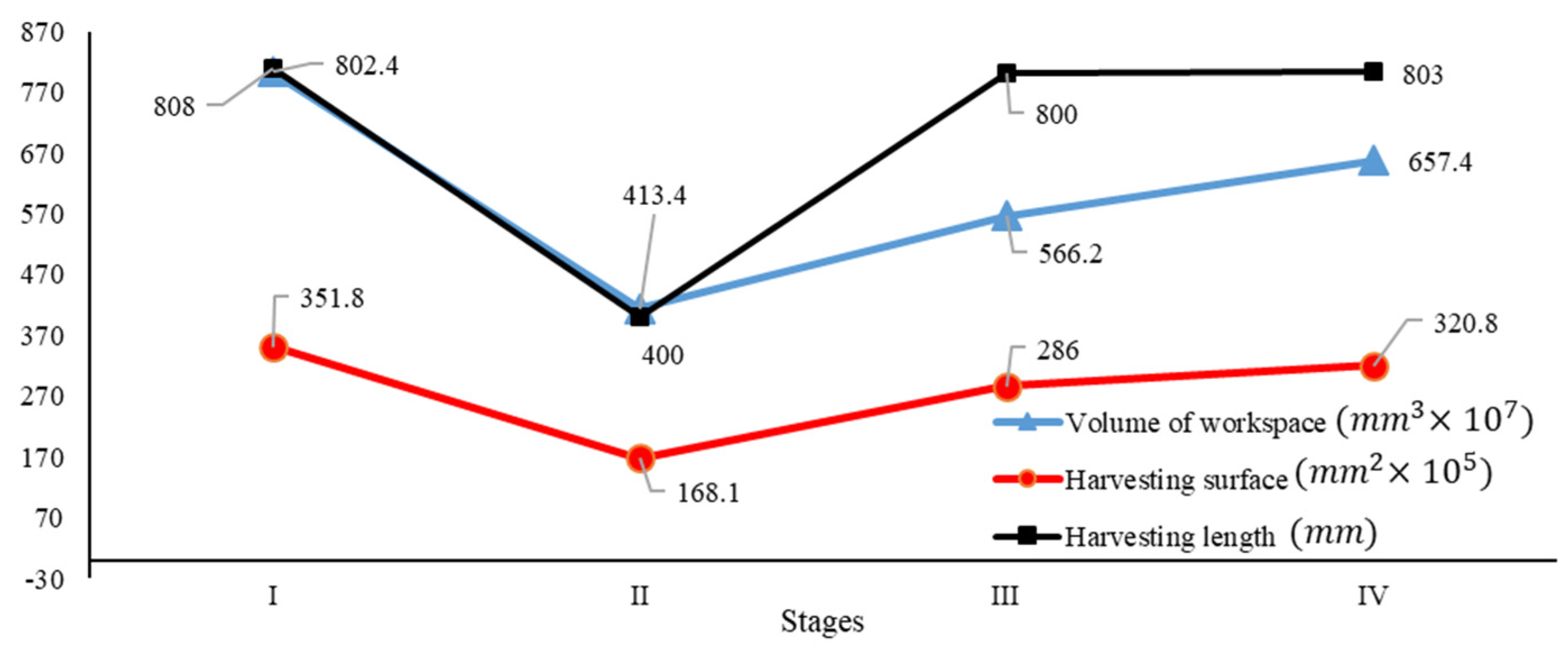
3.1. Workspace Results
3.2. Resolution
3.3. Accuracy and Repeatability
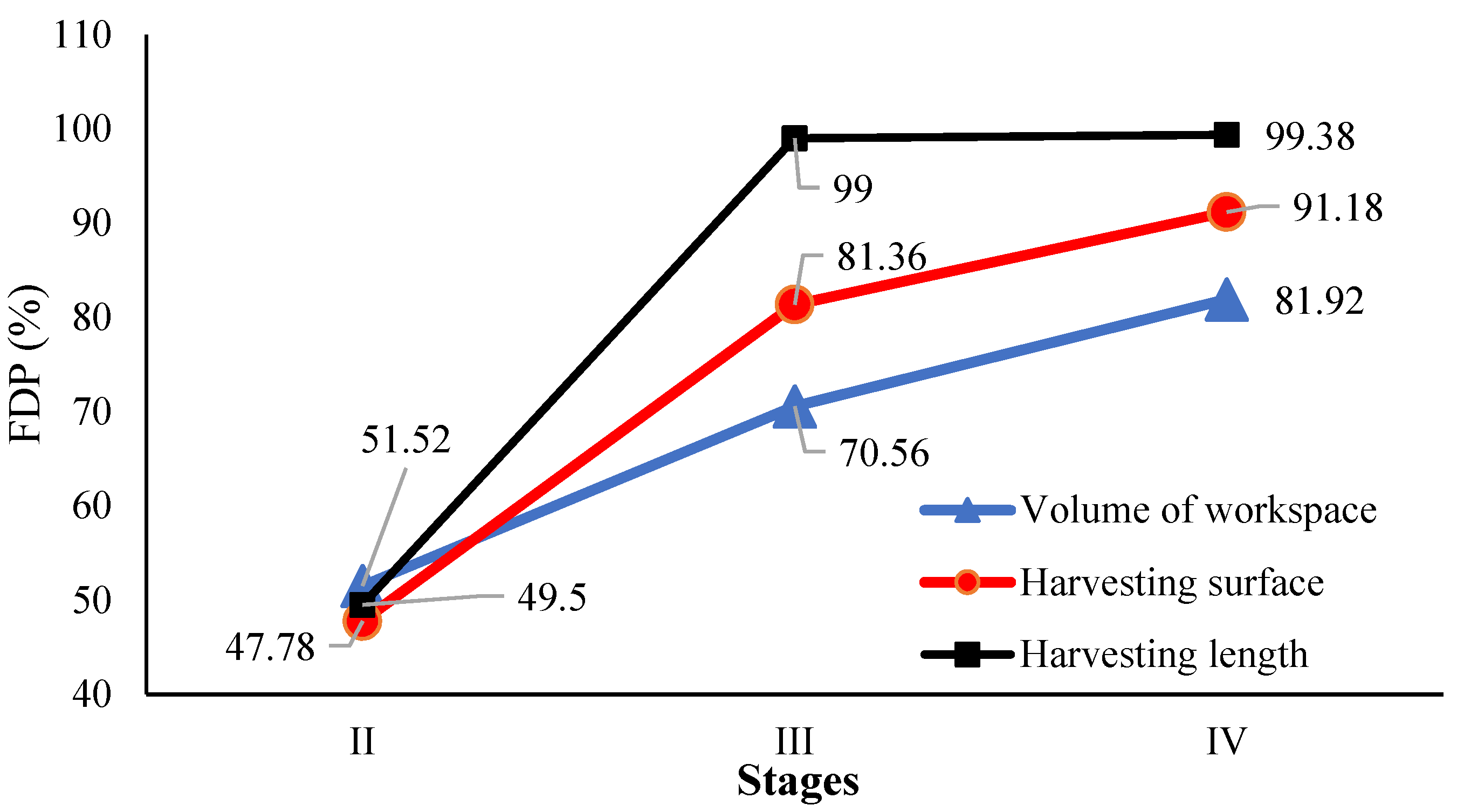
3.4. Workspace Indicators
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- WPP. World Population Prospects. Available online: https://population.un.org/wpp/ (accessed on 21 March 2022).
- Mizushima, A.; Noguchi, N.; Ishii, K. Development of Robot Tractor Using the Low-Cost GPS/INS System; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2005. [Google Scholar]
- Liu, Y.; Noguchi, N.; Ishii, K. Development of a Low-cost IMU by Using Sensor Fusion for Attitude Angle Estimation. IFAC Proc. Vol. 2014, 47, 4435–4440. [Google Scholar] [CrossRef] [Green Version]
- Yin, X.; Noguchi, N. Motion Detection and Tracking Using the 3D-camera. IFAC Proc. Vol. 2011, 44, 14139–14144. [Google Scholar] [CrossRef] [Green Version]
- Noguchi, N.; Barawid, O.C. Robot Farming System Using Multiple Robot Tractors in Japan Agriculture. IFAC Proc. Vol. 2011, 44, 633–637. [Google Scholar] [CrossRef] [Green Version]
- Roshanianfard, A.; Noguchi, N.; Okamoto, H.; Ishii, K. A review of autonomous agricultural vehicles (The experience of Hokkaido University). J. Terramechanics 2020, 91, 155–183. [Google Scholar] [CrossRef]
- Noguchi, N.; Terao, H. Path planning of an agricultural mobile robot by neural network and genetic algorithm. Comput. Electron. Agric. 1997, 18, 187–204. [Google Scholar] [CrossRef]
- Noguchi, N. Vision Intelligence for Mobile Agro-Robotic System. J. Robot. Mechatron. 1999, 11, 193–199. [Google Scholar] [CrossRef]
- Zhang, Q.; Reid, J.F.; Noguchi, N. Agricultural vehicle navigation using multiple guidance sensors. In Proceedings of the International Conference on Field and Service Robotics, Pittsburgh, PA, USA, 29–31 August 1999. [Google Scholar]
- Mizushima, A.; Noguchi, N.; Ishii, K.; Terao, H.; Yukumoto, O.; Yamamoto, S. Automatic Guidance System Composed of Geomagnetic Direction Sensor and Fiber Optic Gyroscope. IFAC Proc. Vol. 2000, 33, 313–317. [Google Scholar] [CrossRef]
- Ryo, T.; Noguchi, N.; Akira, M. Automatic guidance with a laser scanner for a robot tractor in an orchard. In Proceedings of the Automation Technology for Off-Road Equipment, Kyoto, Japan, 7–8 October 2004. [Google Scholar]
- Monte, A.D.; Noboru, N.; Qin, Z.; John, F.R.; Jeffrey, D.W. Sensor-fusion navigator for automated guidance of off-road vehicles. J. Terramechanics 2000, 50, 211–232. [Google Scholar]
- Michio, K.; Noboru, N.; Kazunobu, I.; Hideo, T. Field mobile robot navigated by RTK-GPS and FOG (Part 1)—Estimation of absolute heading angle by sensor-fusion with RTK-GPS and FOG. J. Jpn. Soc. Agric. Mach. 2001, 63, 74–79. [Google Scholar] [CrossRef]
- Michio, K.; Noboru, N.; Kazunobu, I.; Hideo, T. Field mobile robot navigated by RTK-GPS and FOG (Part 2)—Autonomous operation by applying navigation map. J. Jpn. Soc. Agric. Mach. 2001, 63, 80–85. [Google Scholar] [CrossRef]
- Kise, M.; Noguchi, N.; Ishii, K.; Terao, H. Development of the Agricultural Autonomous Tractor with an RTK-GPS and a Fog. IFAC Proc. Vol. 2001, 34, 99–104. [Google Scholar] [CrossRef]
- Noguchi, N.; Reid, J.F.; Zhang, Q.; Will, J.D. Turning function for robot tractor based on spline function. In Proceedings of the 2001 ASAE Annual Meeting, Sacramento, CA, USA, 29 July–1 August 2001. [Google Scholar]
- Kise, M.; Noguchi, N.; Ishii, K.; Terao, H. Enhancement of turning accuracy by path planning for robot tractor. In Proceedings of the Automation Technology for Off-Road Equipment, Chicago, IL, USA, 26–27 July 2002; pp. 398–404. [Google Scholar]
- Kise, M.; Noguchi, N.; Ishii, K.; Terao, H. The development of the autonomous tractor with steering controller applied by optimal control. In Proceedings of the Automation Technology for Off-Road Equipment, Chicago, IL, USA, 26–27 July 2002; pp. 367–373. [Google Scholar]
- Noguchi, N.; Will, J.; Reid, J.; Zhang, Q. Development of a master–slave robot system for farm operations. Comput. Electron. Agric. 2004, 44, 1–19. [Google Scholar] [CrossRef]
- Takai, R.; Barawid, O.; Ishii, K.; Noguchi, N. Development of Crawler-Type Robot Tractor based on GPS and IMU. IFAC Proc. Vol. 2010, 43, 151–156. [Google Scholar] [CrossRef]
- Takai, R.; Barawid, O.; Noguchi, N. Autonomous Navigation System of Crawler-Type Robot Tractor. IFAC Proc. Vol. 2011, 44, 14165–14169. [Google Scholar] [CrossRef]
- Zhang, Z.; Noguchi, N.; Ishii, K.; Yang, L.; Zhang, C. Development of a Robot Combine Harvester for Wheat and Paddy Harvesting. IFAC Proc. Vol. 2013, 46, 45–48. [Google Scholar] [CrossRef]
- Liu, Y.; Noguchi, N.; Roshanianfard, A. Simulation and test of an agricultural unmanned airboat maneuverability model. Int. J. Agric. Biol. Eng. 2017, 10, 88–96. [Google Scholar] [CrossRef]
- Roshanianfard, A.; Mengmeng, D.; Nematollahzadeh, S. A 4-DOF SCARA Robotic Arm for Various Farm Applications: Designing, Kinematic Modelling, and Parameterization. Acta Technol. Agric. 2021, 24, 61–66. [Google Scholar] [CrossRef]
- Wang, X.; Kang, H.; Zhou, H.; Au, W.; Chen, C. Geometry-aware fruit grasping estimation for robotic harvesting in apple orchards. Comput. Electron. Agric. 2022, 193, 106716. [Google Scholar] [CrossRef]
- Roshanianfard, A.; Noguchi, N. Characterization of pumpkin for a harvesting robot. IFAC-PapersOnLine 2018, 51, 23–30. [Google Scholar] [CrossRef]
- Roshanianfard, A.; Noguchi, N. Development of a 5DOF robotic arm (RAVebots-1) applied to heavy products harvesting. IFAC-PapersOnLine 2016, 49, 155–160. [Google Scholar] [CrossRef]
- Qiao, N.; Wang, L.; Liu, M.; Wang, Z. The sliding mode controller with improved reaching law for harvesting robots. J. Intell. Robot. Syst. 2022, 104, 9. [Google Scholar] [CrossRef]
- Roshanianfard, A.; Noguchi, N. Pumpkin harvesting robotic end-effector. Comput. Electron. Agric. 2020, 174, 105503. [Google Scholar] [CrossRef]
- Abbaspour-Gilandeh, Y.; Fazeli, M.; Roshanianfard, A.; Hernández-Hernández, M.; Gallardo-Bernal, I.; Hernández-Hernández, J.L. Prediction of Draft Force of a Chisel Cultivator Using Artificial Neural Networks and Its Comparison with Regression Model. Agronomy 2020, 10, 451. [Google Scholar] [CrossRef] [Green Version]
- Dattatraya, G.D.; Mhatardev, M.V.; Shrihari, L.M.; Joshi, S.G. Robotic agriculture machine. Int. J. Innov. Res. Sci. Eng. Technol. 2014, 3, 454–462. [Google Scholar]
- Roshanianfard, A.; Shahgholi, G. Performance Characterization of Automatic Creep Testing Device for Agricultural Product. Appl. Eng. Agric. 2017, 33, 433–440. [Google Scholar] [CrossRef]
- Deshpande, V.; George, P.M. Kinematic modelling and analysis of 5 DOF robotic arm. Int. J. Robot. Res. Dev. 2014, 4, 17–24. [Google Scholar]
- Kamata, T.; Roshanianfard, A.; Noguchi, N. Heavy-weight Crop Harvesting Robot—Controlling Algorithm. IFAC-PapersOnLine 2018, 51, 244–249. [Google Scholar] [CrossRef]
- Oliveira, L.F.; Moreira, A.P.; Silva, M.F. Advances in agriculture robotics: A state-of-the-art review and challenges ahead. Robotics 2021, 10, 52. [Google Scholar] [CrossRef]
- Lytridis, C.; Kaburlasos, V.G.; Pachidis, T.; Manios, M.; Vrochidou, E.; Kalampokas, T.; Chatzistamatis, S. An Overview of Cooperative Robotics in Agriculture. Agronomy 2021, 11, 1818. [Google Scholar] [CrossRef]
- Rose, D.C.; Lyon, J.; de Boon, A.; Hanheide, M.; Pearson, S. Responsible development of autonomous robotics in agriculture. Nat. Food 2021, 2, 306–309. [Google Scholar] [CrossRef]
- Kootstra, G.; Wang, X.; Blok, P.M.; Hemming, J.; Van Henten, E. Selective harvesting robotics: Current research, trends, and future directions. Curr. Robot. Rep. 2021, 2, 95–104. [Google Scholar] [CrossRef]
- Khadatkar, A.; Mehta, C.R.; Sawant, C.P. Application of robotics in changing the future of agriculture. J. Eco-Friendly Agric. 2022, 17, 48–51. [Google Scholar] [CrossRef]
- Zhang, C. Development of a Multi-Robot Tractor System for Farm Work. Ph.D. Thesis, Hokkaido University, Hokkaido, Japan, 2017. [Google Scholar]
- Takai, R.; Yang, L.; Noguchi, N. Development of a crawler-type robot tractor using RTK-GPS and IMU. Eng. Agric. Environ. Food 2014, 7, 143–147. [Google Scholar] [CrossRef]
- Yang, L.; Noguchi, N.; Takai, R. Development and application of a wheel-type robot tractor. Eng. Agric. Environ. Food 2016, 9, 131–140. [Google Scholar] [CrossRef]
- ASYMTEK Nordson. Making Sense of Accuracy, Repeatability and Specification for Automated Fluid Dispensing Systems. Available online: https://smtnet.com/library/files/upload/Making-Sense-of-Accuracy-and-Repeatability-NordsonASYMTEK.pdf (accessed on 21 March 2022).
- Groover, M.P. Industrial robotics. In Automation, Production Systems, and Computer Integrated Manufacturing; Prentice Hall Press: Upper Saddle River, NJ, USA, 2008. [Google Scholar]
- ISO 9283:1998; Manipulating Industrial Robots—Performance Criteria and Related Test Methods. International Organization for Standardization: Geneva, Switzerlnd, 1998.
- Bac, C.W.; van Henten, E.J.; Hemming, J.; Edan, Y. Harvesting Robots for High-value Crops: State-of-the-art Review and Challenges Ahead. J. Field Robot. 2014, 31, 888–911. [Google Scholar] [CrossRef]
- Octinion. PRESS RELEASE: Octinion Presents the World’s First Strawberry Picking Robot. Available online: http://octinion.com/news/press-release-octinion-presents-world%E2%80%99s-first-strawberry-picking-robot (accessed on 21 January 2022).
- Sweeper. SWEEPER Demonstrated its Harvesting Robot for the First Time. Available online: http://www.sweeper-robot.eu/11-news/48-sweeper-demonstrated-its-harvesting-robot-for-the-first-time (accessed on 21 January 2022).
- Yael, E.; Dima, R.; Tamar, F.; Gaines, E.M. Robotic melon harvesting. IEEE Trans. Robot. Autom. 2000, 16, 831–835. [Google Scholar] [CrossRef]
- Sakai, S.; Iida, M.; Osuka, K.; Umeda, M. Design and control of a heavy material handling manipulator for agricultural robots. Auton. Robot. 2008, 25, 189–204. [Google Scholar] [CrossRef] [Green Version]
- Heon, H.; Si-Chan, K. Development of multi-functional tele-operative modular robotic system for greenhouse watermelon. In Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), Kobe, Japan, 20–24 July 2003; Volume 1342, pp. 1344–1349. [Google Scholar]
- Chen, H.; Heidari, A.A.; Chen, H.; Wang, M.; Pan, Z.; Gandomi, A.H. Multi-population differential evolution-assisted Harris hawks optimization: Framework and case studies. Future Gener. Comput. Syst. 2020, 111, 175–198. [Google Scholar] [CrossRef]
- Shan, W.; Qiao, Z.; Heidari, A.A.; Chen, H.; Turabieh, H.; Teng, Y. Double adaptive weights for stabilization of moth flame optimizer: Balance analysis, engineering cases, and medical diagnosis. Knowl.-Based Syst. 2020, 214, 106728. [Google Scholar] [CrossRef]
- Hu, J.; Chen, H.; Heidari, A.A.; Wang, M.; Zhang, X.; Chen, Y.; Pan, Z. Orthogonal learning covariance matrix for defects of grey wolf optimizer: Insights, balance, diversity, and feature selection. Knowl.-Based Syst. 2021, 213, 106684. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, R.; Heidari, A.A.; Wang, X.; Chen, Y.; Wang, M.; Chen, H. Towards Augmented Kernel Extreme Learning Models for Bankruptcy Prediction: Algorithmic Behavior and Comprehensive Analysis. Neurocomputing 2020, 430, 185–212. [Google Scholar] [CrossRef]
- Zhao, D.; Liu, L.; Yu, F.; Heidari, A.A.; Wang, M.; Liang, G.; Muhammad, K.; Cheng, H. Chaotic random spare ant colony optimization for multi-threshold image segmentation of 2D Kapur entropy. Knowl.-Based Syst. 2020, 216, 106510. [Google Scholar] [CrossRef]
- Tu, J.; Chen, H.; Liu, J.; Heidari, A.A.; Zhang, X.; Wang, M.; Wang, M.; Ruby, R.; Pham, Q.-V. Evolutionary biogeography-based Whale optimization methods with communication structure: Towards measuring the balance. Knowl.-Based Syst. 2020, 212, 106642. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position No. | X (mm) | Y (mm) |
|---|---|---|
| 1 | 500 | −1470 |
| 2 | 1200 | −1200 |
| 3 | 1450 | 500 |
| 4 | 700 | 950 |
| 5 | 550 | −1150 |
| 6 | 1400 | −700 |
| 7 | 550 | 1350 |
| 8 | 950 | −450 |
| 9 | 1100 | 250 |
| 10 | 1150 | 20 |
| 11 | 1500 | 900 |
| Indicator | Equation | Unit |
|---|---|---|
| HSR | % | |
| CT | s | |
| DR | % |
| Indicator | Description | Start Point | ENDPOINT |
|---|---|---|---|
| CTScenario-1 | The consumed time for full harvesting procedures plus transportation to the next crop plus time loss because of failed attempts | UPn | UP(n+1) |
| CTScenario-2 | The consumed time for harvesting each pumpkin | WPn | UPn |
| CTScenario-3 | The consumed time between the target position to unloading position in the same step | TPn | UPn |
| Stage | SR ± Tolerance (mm) | ||
|---|---|---|---|
| X | Y | Z | |
| I | 1 ± 0.075 | 1 ± 0.050 | 1 ± 0.025 |
| II | 1 ± 0.273 | 1 ± 0.360 | 1 ± 0.381 |
| IV | 1 ± 0.372 | 1 ± 0.259 | 1 ± 0.388 |
| Parameters | Experiment Positions | Average (mm) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | ||||
| II | Accuracy | x | 5.52 | 2.55 | 5.39 | 23.77 | 4.56 | 15.5 | 14.66 | 10.7 | 15.56 | 10.23 | 11.57 | 10.91 |
| y | 20.77 | 14.58 | 7.6 | 19.1 | 2.81 | 3.53 | 18.16 | 3.24 | 0.83 | 3.92 | 10.2 | 9.52 | ||
| Repeatability | 13.9 | 12.27 | 14.56 | 8.1 | 14.7 | 12.47 | 12.26 | 12.53 | 12.87 | 12.65 | 13.83 | 12.74 | ||
| III | Accuracy | x | 4.26 | 7.29 | 6.59 | 2.73 | 4.66 | 5.24 | 4.85 | 1.51 | 11.67 | 1.43 | 7.20 | 5.22 |
| y | 0.64 | 0.33 | 8.49 | 9.59 | 2.00 | 3.83 | 4.15 | 3.37 | 8.80 | 0.50 | 1.98 | 4.02 | ||
| Repeatability | 4.62 | 4.87 | 4.84 | 5.74 | 5.77 | 6.01 | 5.23 | 6.09 | 3.56 | 6.15 | 4.63 | 5.23 | ||
| IV | Accuracy | x | 4.48 | 4.66 | 7.02 | 5.55 | 3.74 | 3.89 | 5.76 | 4.04 | 7.5 | 9.4 | 7.77 | 5.8 |
| y | 5.2 | 4.72 | 3.5 | 4.89 | 5.76 | 5.76 | 3.77 | 5.09 | 8.3 | 2.56 | 3.04 | 4.78 | ||
| Repeatability | 4.62 | 6.3 | 5.08 | 5.67 | 2.38 | 4.33 | 5.66 | 3.98 | 5.27 | 5.4 | 5.87 | 5.11 | ||
| Stage | CT (Scenario-1) | CT (Scenario-2) | CT(Scenario-3) | CT (Average) | HSR (%) | DR (%) |
|---|---|---|---|---|---|---|
| II | 58.7 | 41.9 | 35.1 | 45.23 | 92 | 0 |
| III | 62.6 | 50.7 | 42.6 | 51.96 | 88 | 5 ~ 7 |
| IV | 63.1 | 50.9 | 43.2 | 52.4 | 87 | 5 ~ 7 |
| Parameter | Stage | Unit | |||
|---|---|---|---|---|---|
| II | III | IV | |||
| Accuracy-X (Acx) | 10.91 | 5.22 | 5.8 | mm | |
| Accuracy-Y (Acy) | 9.52 | 4.02 | 4.78 | mm | |
| Repeatability (Rp) | 12.74 | 5.23 | 5.11 | mm | |
| Workspace volume (V) | 4.134 | 5.662 | 6.574 | ×109 mm3 | |
| Harvesting surface (HS) | 1.681 | 2.86 | 3.208 | ×106 mm2 | |
| Harvesting length (HL) | 400 | 800 | 803 | mm | |
| Damage rate (DR) | 0 | 5 | 5 | % | |
| Harvest success rate (HSR) | 92 | 88 | 87 | % | |
| cycle time (CT) | Scenario-1 | 58.7 | 62.6 | 63.1 | s |
| Scenario-2 | 41.9 | 50.7 | 50.9 | s | |
| Scenario-3 | 35.1 | 42.6 | 43.2 | s | |
| Control resolution (CR) | X | 1 ± 0.075 | 1 ± 0.273 | 1 ± 0.372 | mm |
| Y | 1 ± 0.05 | 1 ± 0.36 | 1 ± 0.259 | mm | |
| Z | 1 ± 0.025 | 1 ± 0.381 | 1 ± 0.388 | mm | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roshanianfard, A.; Noguchi, N.; Ardabili, S.; Mako, C.; Mosavi, A. Autonomous Robotic System for Pumpkin Harvesting. Agronomy 2022, 12, 1594. https://doi.org/10.3390/agronomy12071594
Roshanianfard A, Noguchi N, Ardabili S, Mako C, Mosavi A. Autonomous Robotic System for Pumpkin Harvesting. Agronomy. 2022; 12(7):1594. https://doi.org/10.3390/agronomy12071594
Chicago/Turabian StyleRoshanianfard, Ali, Noboru Noguchi, Sina Ardabili, Csaba Mako, and Amir Mosavi. 2022. "Autonomous Robotic System for Pumpkin Harvesting" Agronomy 12, no. 7: 1594. https://doi.org/10.3390/agronomy12071594