
Design and Test of Obstacle Detection and Harvester Pre-Collision System Based on 2D Lidar

 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Equipment
2.2. Lidar Processing Algorithm
2.2.1. Pre-Processing
2.2.2. Filtering
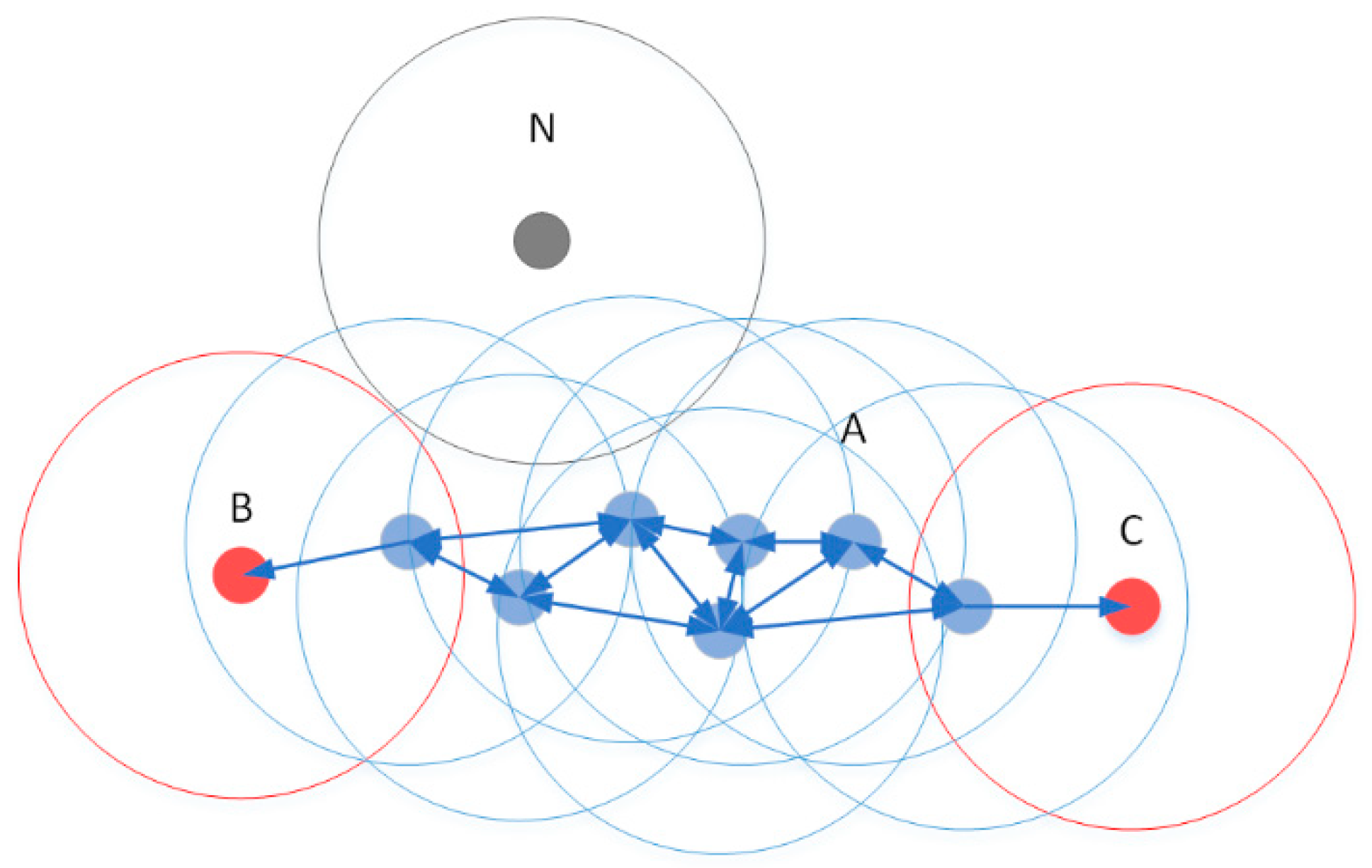
2.2.3. DBSCAN Clustering
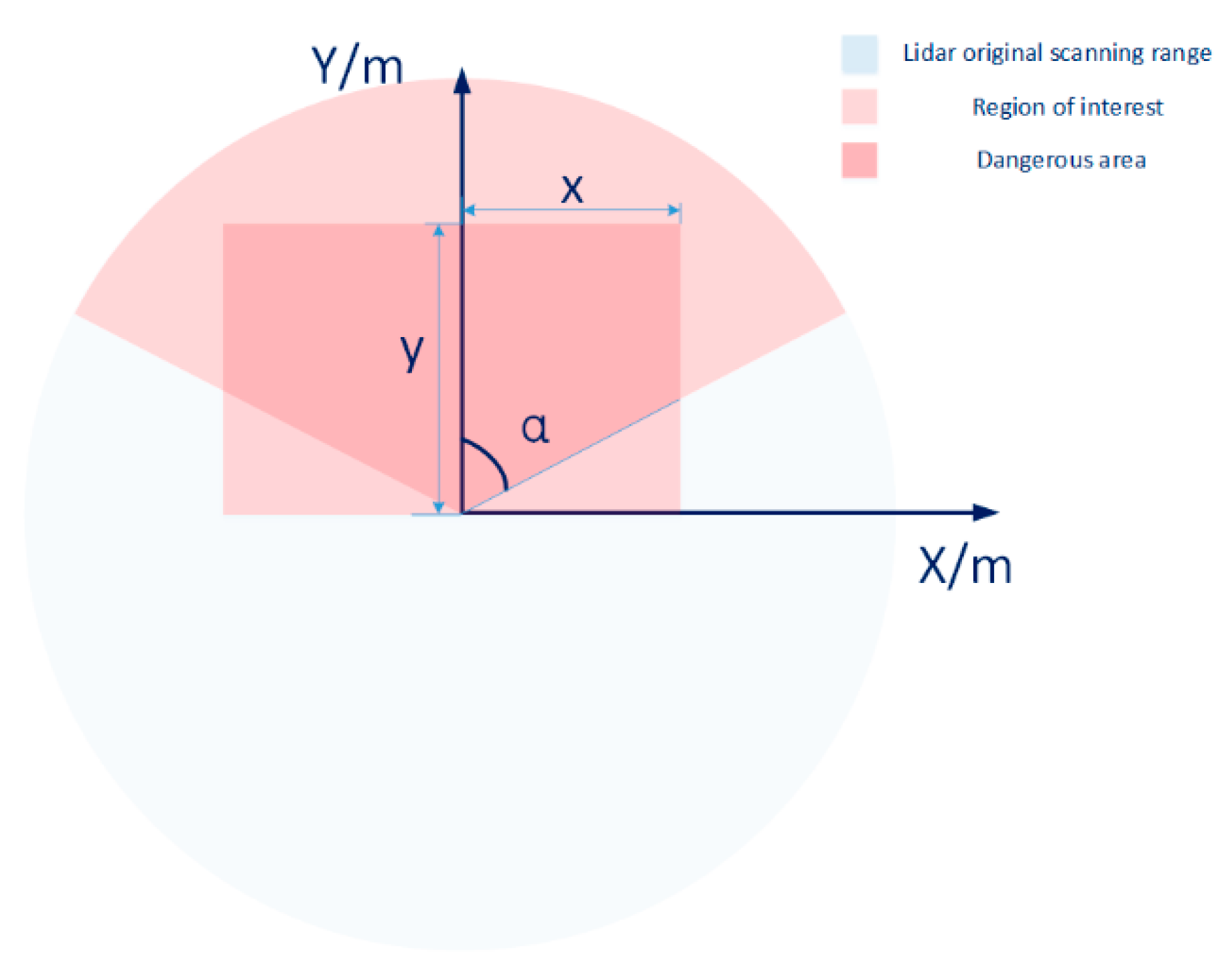
2.2.4. Obstacle Information Calculation
2.3. Emergency Braking Strategy and Software Development
2.3.1. Emergency Braking Strategy
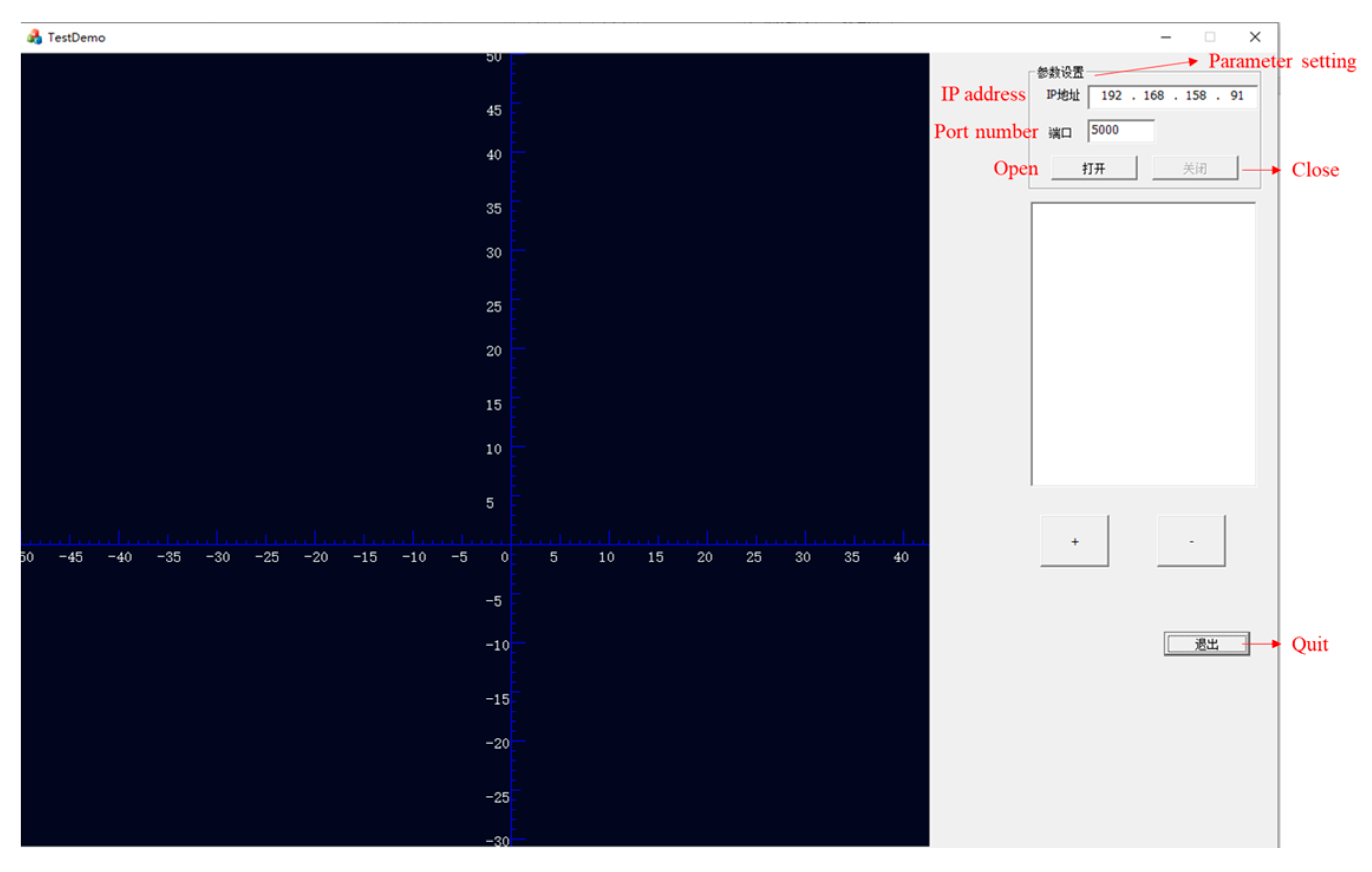
2.3.2. Software Development
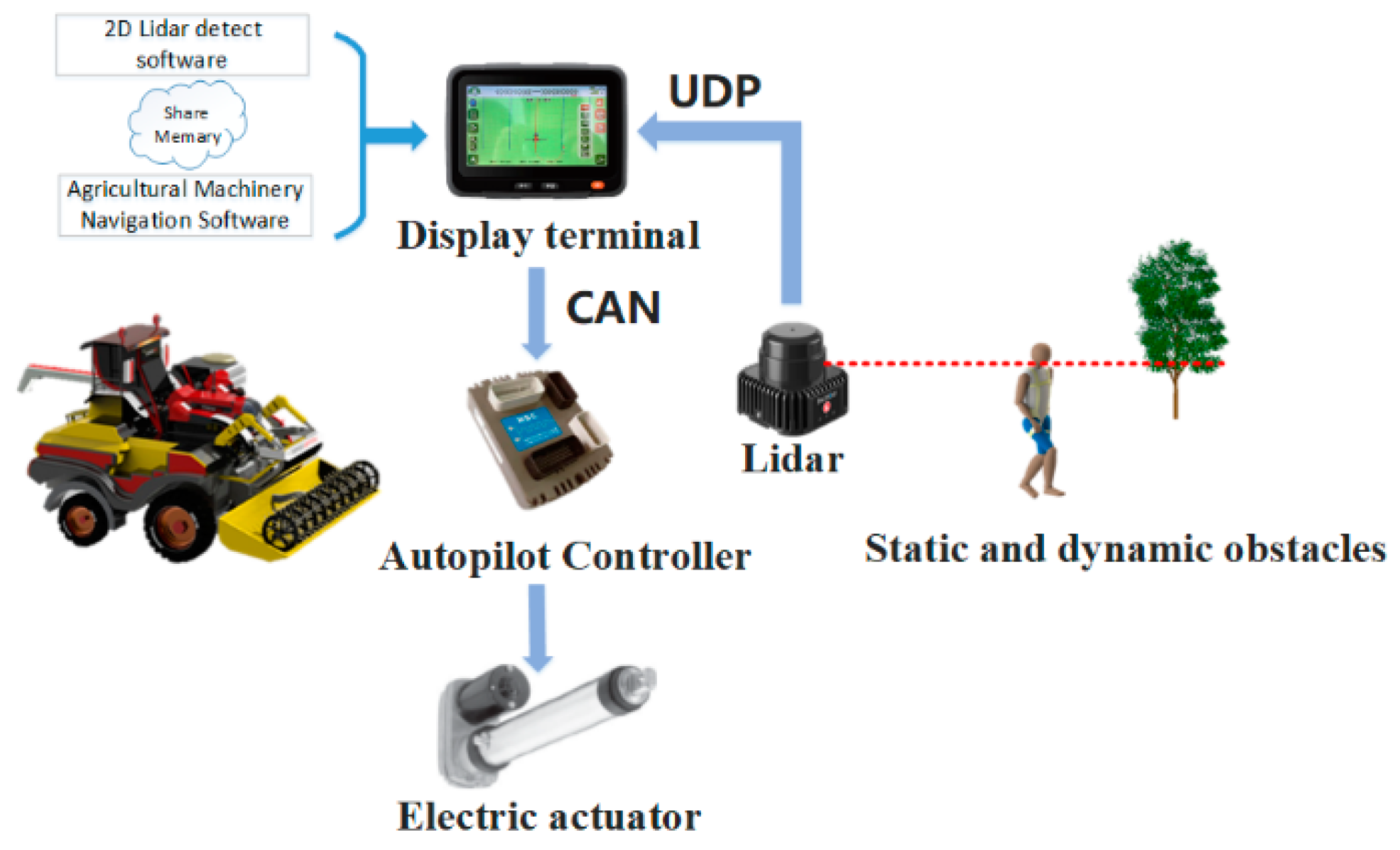
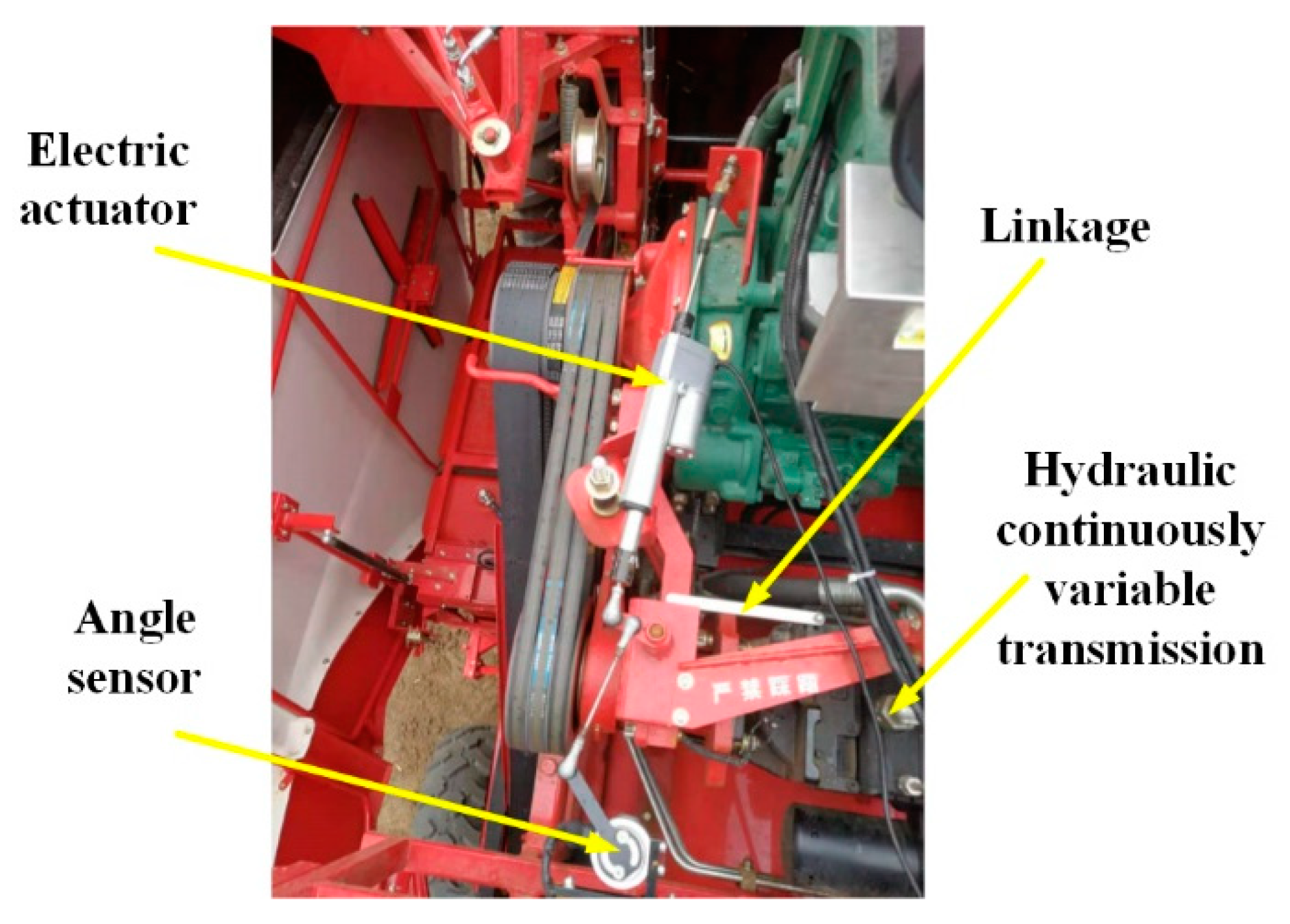
2.4. Design of a Harvester Pre-Collision System
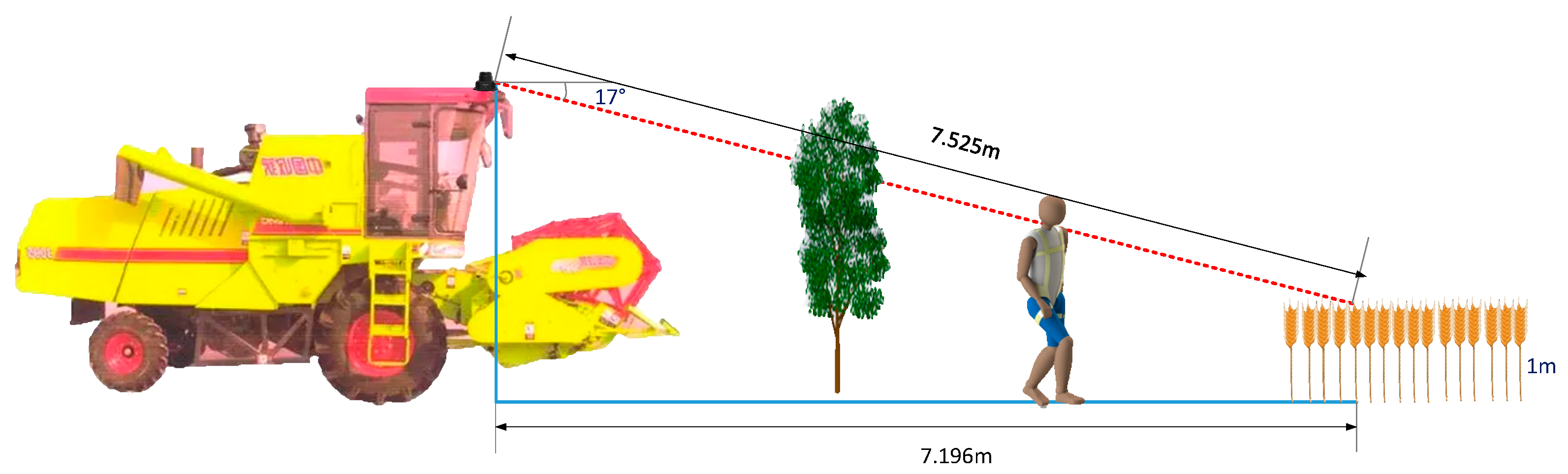
2.5. Experiment
3. Results and Discussion
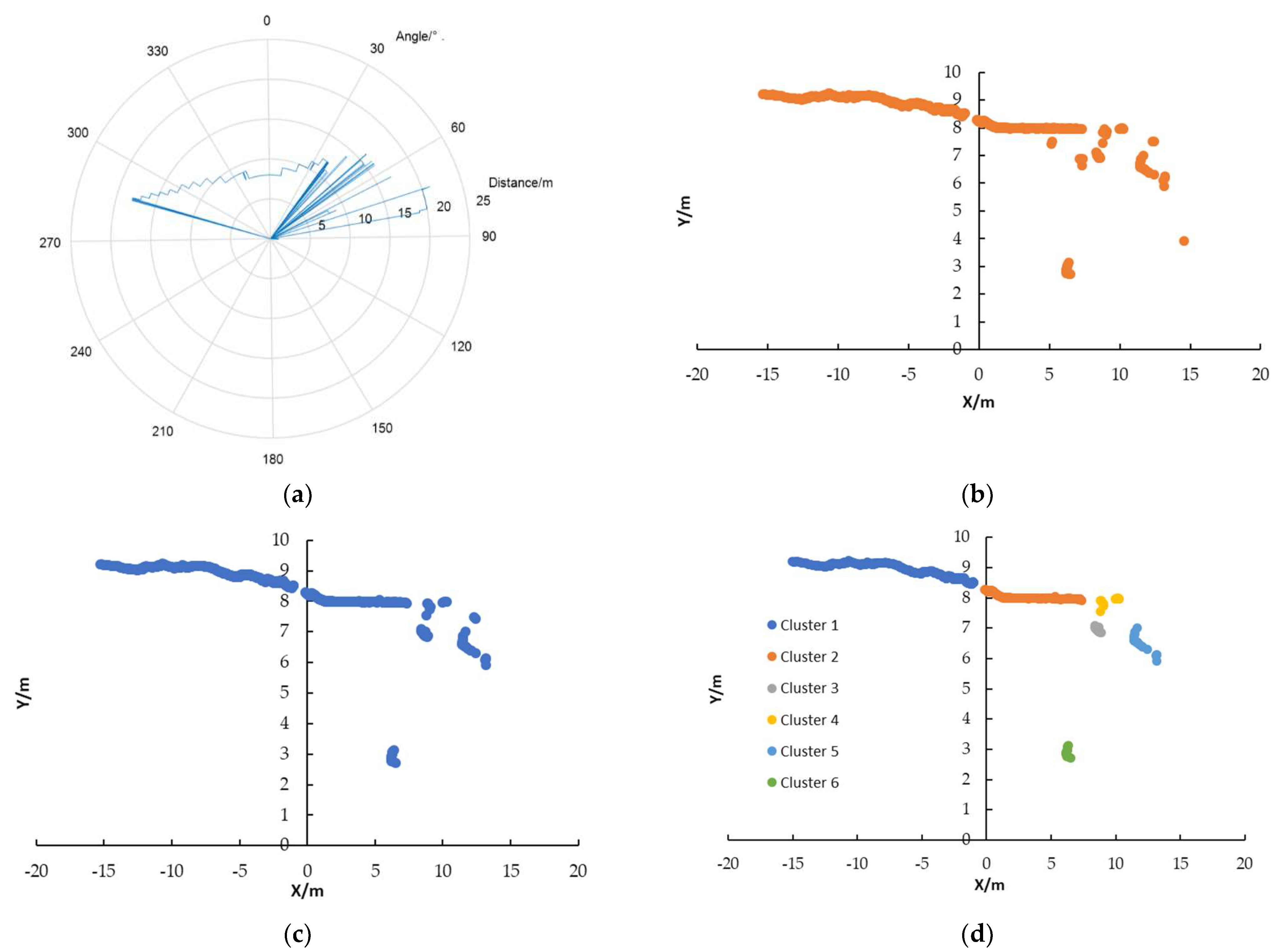
3.1. Multi-Obstacle Detection Results
3.2. Pre-Collision Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, S.; Tian, X.; Wang, S. Impact of aging agricultural labor on mechanization and technical efficiency in wheat production: A perspective analysis based on landforms. J. China Agric. Univ. 2018, 23, 174–182. [Google Scholar] [CrossRef]
- Zhang, M.; Ji, Y.; Li, S.; Cao, R.; Xu, H.; Zhang, Z. Research progress of agricultural machinery navigation technology. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–18. [Google Scholar] [CrossRef]
- Rahman, M.M.; Ishii, K.; Noguchi, N. Optimum harvesting area of convex and concave polygon field for path planning of robot combine harvester. Intel. Serv. Robot. 2019, 12, 167–179. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Jiang, H.; Fang, H.; Wang, Y.; Liu, Y. Research progress of intelligent obstacle detection methods of vehicles and their application on agriculture. Trans. Chin. Soc. Agric. Eng. 2018, 34, 21–32. [Google Scholar] [CrossRef]
- Dvorak, J.S.; Stone, M.L.; Self, K.P. Object detection for agricultural and construction environments using an ultrasonic sensor. J. Agric. Saf. Health 2016, 22, 107–119. [Google Scholar] [CrossRef] [PubMed]
- Wei, J.; Han, S.; Reid, J.F.; Han, S. Obstacle detection using stereo vision to enhance safety of autonomous machines. Trans. ASABE 2005, 48, 2389–2397. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, S.; Chen, B.; Liu, Z. Detection of obstacles in farmland based on binocular vision. J. China Agric. Univ. 2007, 12, 70–74. [Google Scholar]
- Ding, Y.; Wang, S.; Chen, H. Obstacle detection in the working area of agricultural vehicle based on machine vision. Trans. Chin. Soc. Agric. Mach. 2009, 40 (Suppl. 1), 23–27. [Google Scholar]
- Yin, X.; Noguchi, N.; Ishi, K. Development of an obstacle avoidance system for a field robot using a 3D camera. Eng. Agric. Environ. Food 2013, 6, 41–47. [Google Scholar] [CrossRef]
- Brenneke, C.; Wagner, B. A Scan Based Navigation System for Autonomous Operation of Mobile Robots in Man-Made Environments. In Proceedings of the International Conference of Systems Engineering, Institute for System Engineering, Hannover, Germany, 1 January 2003. [Google Scholar]
- Jiménez, F.; Naranjo, J.E. Improving the obstacle detection and identification algorithms of a laser scanner-based collision avoidance system. Transp. Res. Part C Emerg. Technol. 2011, 19, 658–672. [Google Scholar] [CrossRef]
- Asvadi, A.; Premebida, C.; Peixoto, P.; Nunes, U. 3D Lidar-based static and moving obstacle detection in driving environments. Robot. Auton. Syst. 2016, 83, 299–311. [Google Scholar] [CrossRef]
- Zeng, L.; Feng, J.; He, L. Semantic segmentation of sparse 3D point cloud based on geometrical features for trellis-structured apple orchard. Biosyst. Eng. 2020, 196, 46–55. [Google Scholar] [CrossRef]
- Doerr, Z.; Mohsenimanesh, A.; Lagu, C.; Mclaughlin, N. Application of the LIDAR technology for obstacle detection during the operation of agricultural vehicles. Can. Biosyst. Eng. Le Genie Des Biosyst. Au Can. 2013, 55, 2.9–2.16. [Google Scholar] [CrossRef] [Green Version]
- Takahashi, M.; Kobayashi, K.; Watanabe, K.; Kinoshita, T. Development of prediction based emergency obstacle avoidance module by using LIDAR for mobile robot. IEEE Int. Symp. Soft Comput. Intell. Syst. 2015, 2014, 561–564. [Google Scholar] [CrossRef]
- Peng, Y.; Qu, D.; Zhong, Y.; Xie, S.; Luo, J.; Gu, J. The Obstacle Detection and Obstacle Avoidance Algorithm Based on 2-D Lidar. In Proceedings of the IEEE International Conference on Information and Automation, Lijiang, China, 10 August 2015. [Google Scholar] [CrossRef]
- Reina, G.; Milella, A.; Rouveure, R.; Nielsen, M.; Worst, R.; Blas, M.R. Ambient awareness for agricultural robotic vehicles. Biosyst. Eng. 2016, 146, 114–132. [Google Scholar] [CrossRef]
- Kragh, M.; Underwood, J. Multi-Modal Obstacle Detection in Unstructured Environments with Conditional Random Fields. J. Field Robot. 2017, 37, 53–72. [Google Scholar] [CrossRef] [Green Version]
- Xue, J.; Fan, B.; Yan, J.; Dong, S. Trunk detection based on laser radar and vision data fusion. Int. J. Agric. Biol. Eng. 2018, 11, 20–26. [Google Scholar] [CrossRef]
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms, 2nd ed.; MIT Press: Cambridge, MA, USA; McGraw-Hill: New York, NY, USA, 2001; Problem 2–2; p. 40. ISBN 0-262-03293-7. [Google Scholar]
- Visual Studio 2019 Release Notes. Available online: Msdn.microsoft.com (accessed on 24 July 2019).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Measuring range (m) | 0.1–40 |
| Ranging accuracy (cm) | ±3 |
| Field of view (°) | 360 |
| Angle resolution (°) | 0.09–0.27 |
| Rotating speed (r/min) | 300–900 |
| Test Group | Number of Frames | The Number of Obstacles That Occurred | The Number of Vehicle Stops | Precision Rate | Recall Rate | Harmonic Mean Value |
|---|---|---|---|---|---|---|
| 1 | 791 | 5 | 5 | 100% | 100% | 100% |
| 2 | 849 | 4 | 4 | 100% | 100% | 100% |
| 3 | 610 | 5 | 4 | 80% | 100% | 88.89% |
| 4 | 1274 | 6 | 5 | 83.33% | 100% | 90.91% |
| 5 | 341 | 5 | 5 | 100% | 100% | 100% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shang, Y.; Wang, H.; Qin, W.; Wang, Q.; Liu, H.; Yin, Y.; Song, Z.; Meng, Z. Design and Test of Obstacle Detection and Harvester Pre-Collision System Based on 2D Lidar. Agronomy 2023, 13, 388. https://doi.org/10.3390/agronomy13020388
Shang Y, Wang H, Qin W, Wang Q, Liu H, Yin Y, Song Z, Meng Z. Design and Test of Obstacle Detection and Harvester Pre-Collision System Based on 2D Lidar. Agronomy. 2023; 13(2):388. https://doi.org/10.3390/agronomy13020388
Chicago/Turabian StyleShang, Yehua, Hao Wang, Wuchang Qin, Qian Wang, Huaiyu Liu, Yanxin Yin, Zhenghe Song, and Zhijun Meng. 2023. "Design and Test of Obstacle Detection and Harvester Pre-Collision System Based on 2D Lidar" Agronomy 13, no. 2: 388. https://doi.org/10.3390/agronomy13020388
APA StyleShang, Y., Wang, H., Qin, W., Wang, Q., Liu, H., Yin, Y., Song, Z., & Meng, Z. (2023). Design and Test of Obstacle Detection and Harvester Pre-Collision System Based on 2D Lidar. Agronomy, 13(2), 388. https://doi.org/10.3390/agronomy13020388