
Design and Test of Peanut Root-Disk Full-Feeding Longitudinal Axial Flow Pod-Picking Device

(This article belongs to the Section Agricultural Biosystem and Biological Engineering)
Abstract
:1. Introduction
2. Materials and Methods
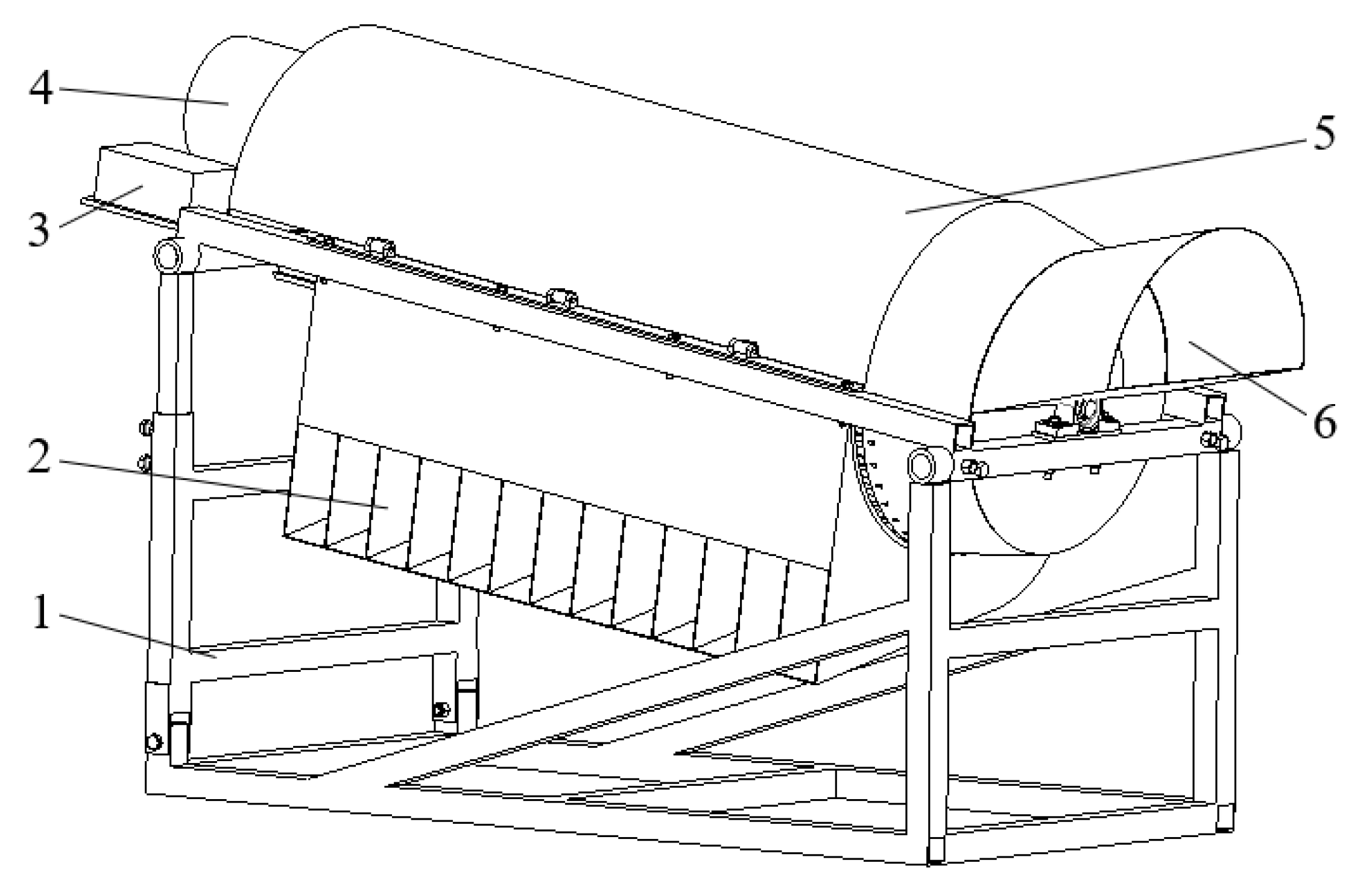
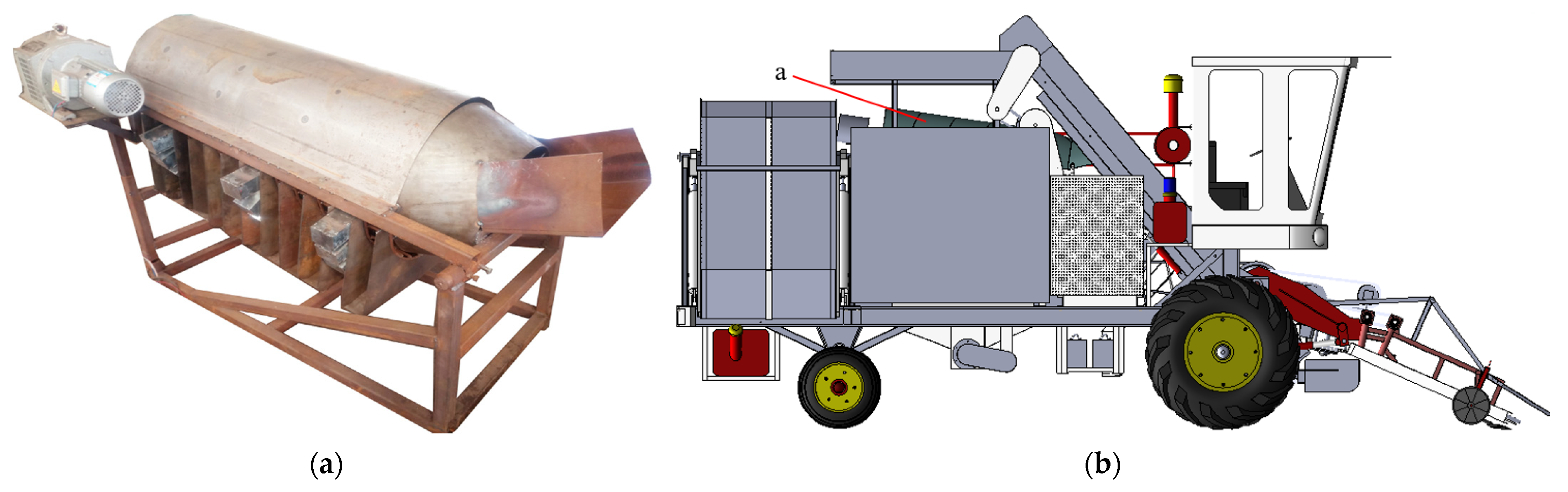
2.1. Structure and Working Principles of the Pod-Picking Device
2.2. Design of Core Components of the Pod-Picking Device
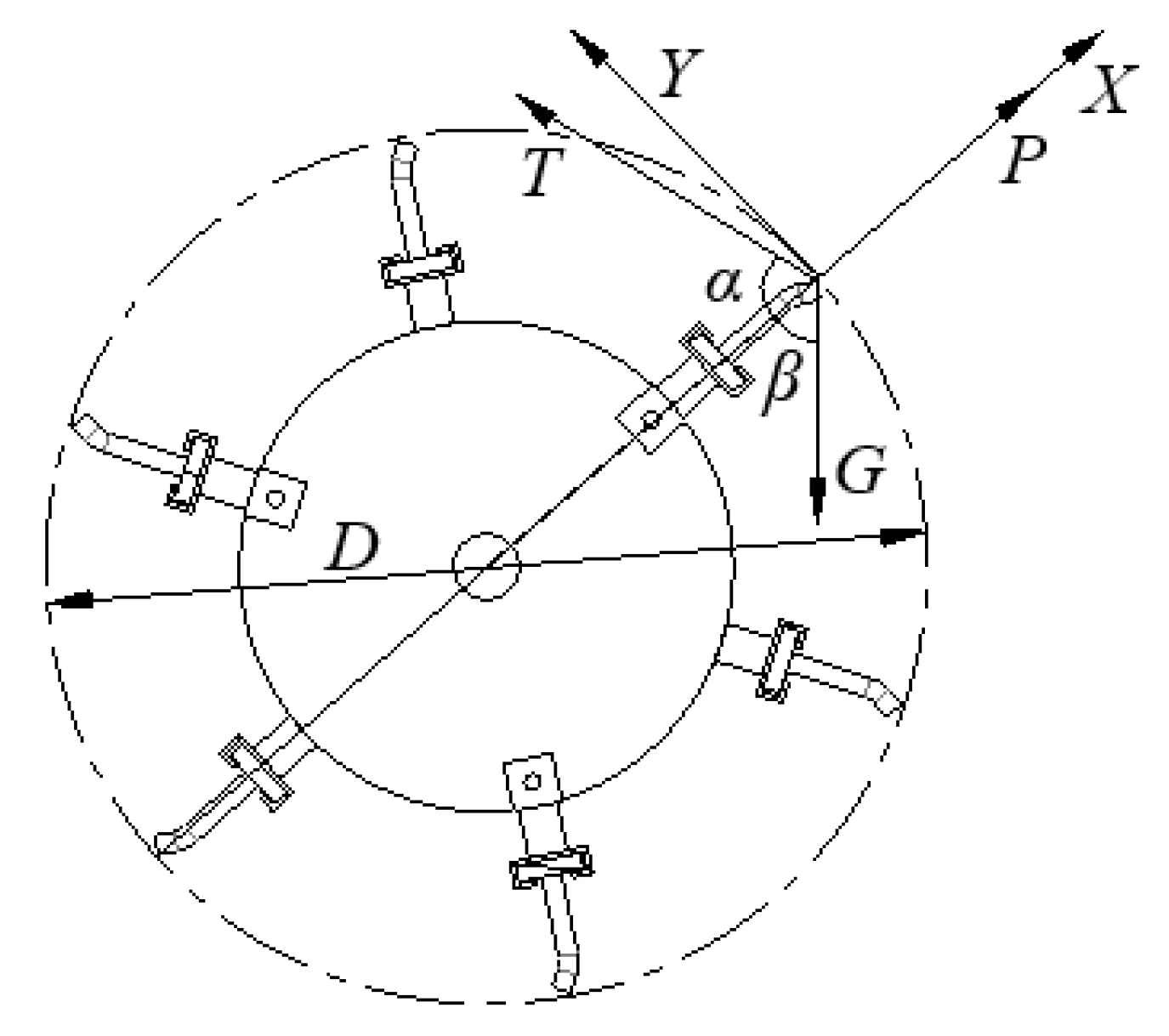
2.2.1. Fixation and Adjustment of Pod-Picking Rods
2.2.2. Determination of the Rotational Speed of the Pod-Picking Roller
2.2.3. Determination of the Diameter of the Pod-Picking Roller
2.2.4. Determination of the Effective Pod-Picking Length of the Pod-Picking Roller
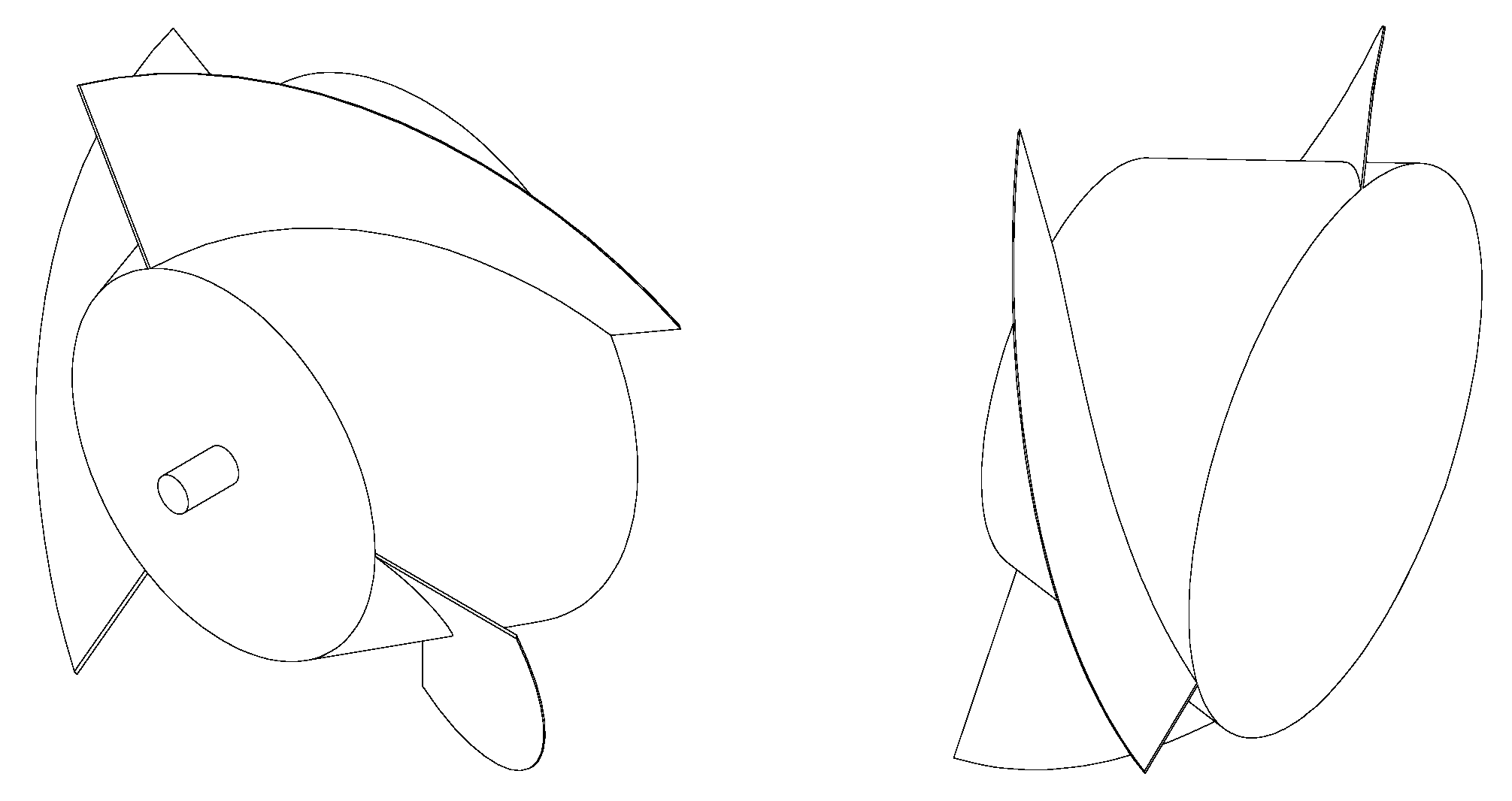
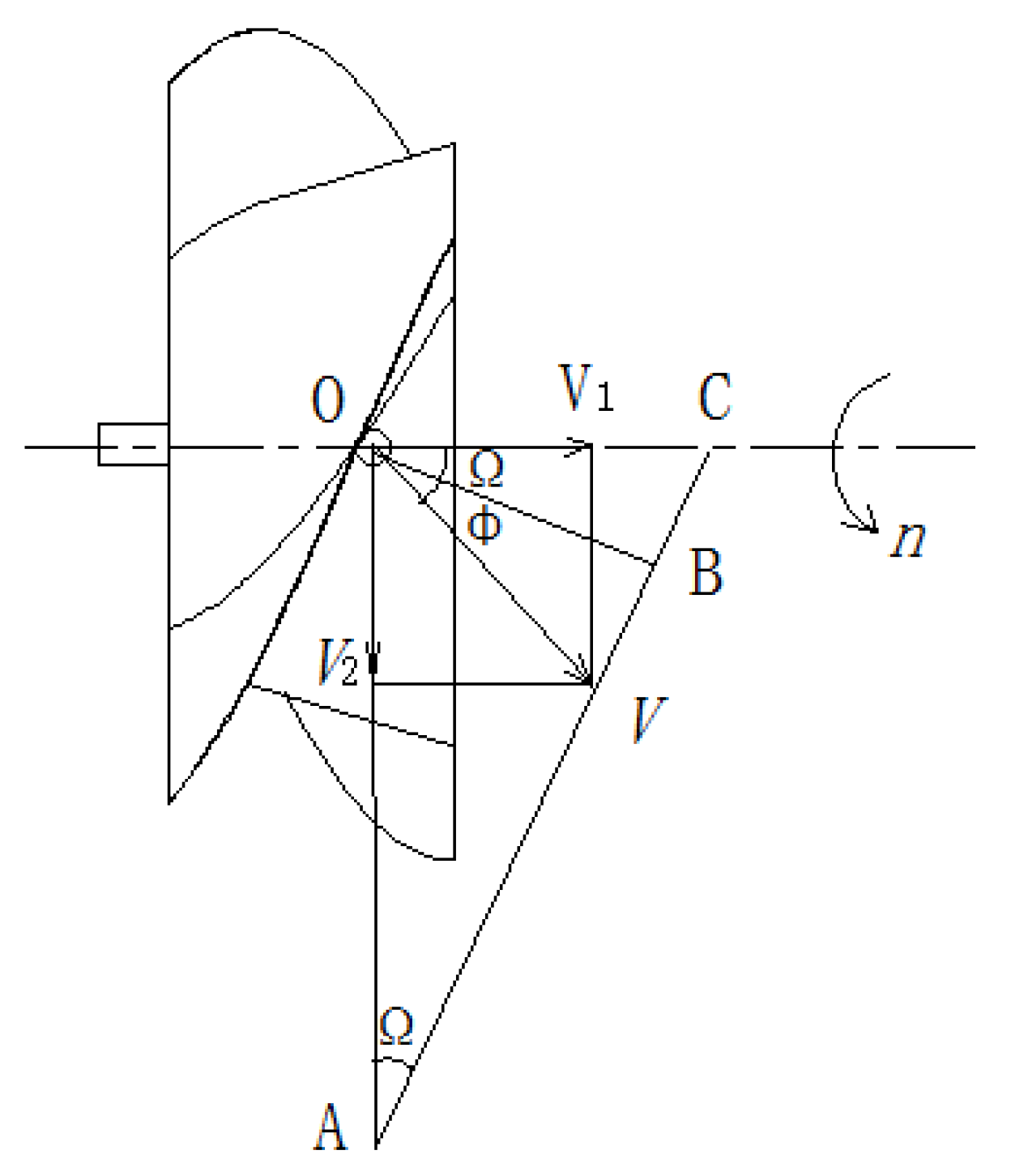
2.2.5. Determination of the Screw-Feeding Stirrer Parameters
2.3. Experimental Design and Analysis
2.4. Comparative Experiment and Field Test
3. Results
3.1. Significance Analysis of Picking Rate Y1
3.2. Significance Analysis of Crushing Rate Y2
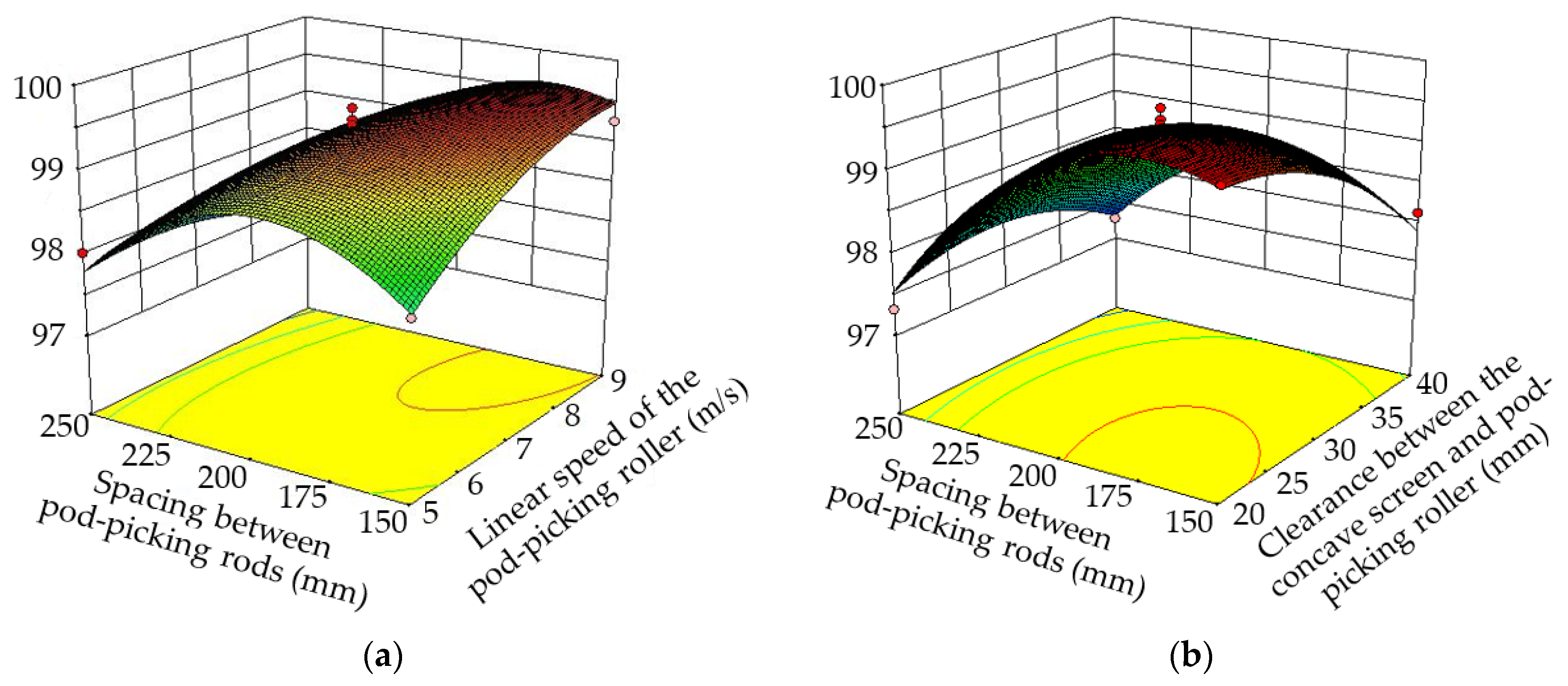
3.3. Analysis of Response Surfaces
3.4. Results of Comparative Experiment and Field Test
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yu, J.D.; Liu, Y.F.; Wang, D.W. Design and experimental study of movable peanut picker. J. Agric. Mech. Res. 2021, 43, 59–65. [Google Scholar]
- Wu, T.L. Design and Test of Hanging Small Peanut Picker. Master’s Thesis, Xinjiang Agricultural University, Wulumuqi, China, 2022. [Google Scholar]
- Fang, Q.L. Innovative Design and Performance Analysis on the Picking Device for Peanut Combine Harvester. Master’s Thesis, Hebei Normal University of Science & Technology, Qinhuangdao, China, 2021. [Google Scholar]
- Yang, L.Q.; Wang, W.Z.; Zhang, H.M.; Li, L.H.; Wang, M.; Hou, M.T. Improved design and bench test based on tangential flow-transverse axial flow threshing system. Trans. Chin. Soc. Agric. Eng. 2018, 34, 35–43. [Google Scholar]
- Wang, S.Z.; Lu, B.C.; Cao, J.R.; Shen, M.W.; Zhou, C.Q.; Feng, Y. Research on a method for diagnosing clogging faults and longitudinal axial flow in the threshing cylinders of drum harvesters. Noise Control. Eng. J. 2021, 69, 209. [Google Scholar] [CrossRef]
- Tang, Z.; Li, Y.M.; Xu, L.Z.; Kumi, F. Modeling and design of a combined transverse and axial flow threshing unit for rice harvesters. Span. J. Agric. Res. 2014, 12, 973–983. [Google Scholar] [CrossRef] [Green Version]
- Fu, J.; Xie, G.; Ji, C.; Wang, W.; Zhou, Y.; Zhang, G.; Zha, X.; Abdeen, M.A. Study on the distribution pattern of threshed mixture by drum-shape bar-tooth longitudinal axial flow threshing and separating device. Agriculture 2021, 11, 756. [Google Scholar] [CrossRef]
- Wang, R.X.; Zhao, X.P.; Ji, J.T.; Jin, X.; Li, B. Design and performance analysis of tangential-axial flow threshing device for oat harvester. Int. J. Agric. Biol. Eng. 2021, 6, 61–67. [Google Scholar] [CrossRef]
- Petre, I.M. Modeling and simulation of grain threshing and separation in axial threshing units. Part II. Application to tangential feeding. Comput. Electron. Agric. 2008, 60, 105–109. [Google Scholar]
- Wang, B.K.; Gu, F.W.; Cao, M.Z.; Xie, H.X.; Wu, F.; Peng, B.L.; Hu, Z.C. Analysis and evaluation of the influence of different drum forms of peanut harvester on pod-pickup quality. Agriculture 2022, 12, 769. [Google Scholar] [CrossRef]
- Negrete, J.C. Current status and strategies for harvest mechanization of peanut in Mexico. Int. J. Agric. Environ. Sci. 2015, 2, 7–15. [Google Scholar]
- Gao, L.X.; Su, Z.; Chen, Z.Y.; Liu, Z.X.; Lü, C.Y.; Li, H. Design and experiment of double-roller semi-feeding peanut picking device for breeding in mini type area. Trans. Chin. Soc. Agric. Mach. 2016, 47, 93–98. [Google Scholar]
- Wang, S.Y.; Hu, Z.C.; Xu, H.B.; Cao, M.Z.; Yu, Z.Y.; Peng, B.L. Design and test of pickup and conveyor device for full-feeding peanut pickup harvester. Trans. CSAE 2019, 35, 20–28. [Google Scholar]
- Chen, Z.Y.; Guan, M.; Gao, L.X.; Chen, L.J.; Ma, F.; Dong, H.S. Design and test on axial flow peanut picking device with screw bending-tooth. Trans. Chin. Soc. Agric. Mach. 2016, 47, 106–113. [Google Scholar]
- Shi, L.L.; Wang, B.; Hu, Z.C.; Yang, H.G. Mechanism and experiment of full-feeding tangential-flow picking for peanut harvesting. Agriculture 2022, 12, 1448. [Google Scholar] [CrossRef]
- Wang, B.K.; Hu, Z.C.; Cao, M.Z.; Zhang, P.; Yu, Z.Y.; Zhang, C. Design and test of axial-flow peanut picking and harvesting machine. Trans. Chin. Soc. Agric. Mach. 2021, 52, 109–118. [Google Scholar]
- Wang, B.K.; Gu, F.W.; Yu, Z.Y.; Cao, M.Z.; Wang, J.T.; Hu, Z.C. Design and experiment of picking-up mechanism of axial-flow full-feed peanut harvester. Trans. Chin. Soc. Agric. Mach. 2020, 51, 132–141. [Google Scholar]
- Wang, Q.H.; Yu, Z.Y.; Zhang, Y.H.; Li, J.H.; Peng, B.L.; Wang, B.; Hu, Z.C. Experimental study of a 4HLB-4 half-feed four-row peanut combine harvester. Agronomy 2022, 12, 3094. [Google Scholar] [CrossRef]
- Gao, Z.H.; Shang, S.Q.; Wang, D.W.; He, X.N.; Xu, N.; Zheng, J.M.; Zhou, Z.H.; Liu, B. Design and test of three ridge six row peanut combine harvester picking device. J. Agric. Mech. Res. 2023, 45, 176–181. [Google Scholar]
- Zheng, J.M.; Shang, S.Q.; Wang, D.W.; He, X.N.; Zhao, Z.; Zheng, X.S.; Guo, P.; Xu, J.M. Design and test analysis of helical vane of peanut stripper with longitudinal axial flow. J. Agric. Mech. Res. 2023, 45, 183–189. [Google Scholar]
- Zheng, J.M.; Wang, D.W.; Shang, S.Q.; He, X.N.; Xu, N.; Gao, Z.H.; Guo, P.; Zhao, Z.L. Design and experiment of feeding and conveying device for peanut picking combine. J. Agric. Mech. Res. 2023, 45, 81–87. [Google Scholar]
- Wu, T.L.; Guo, H.; Yu, X.D.; Peng, B.; Liu, H.S.; Ye, X.W. Design and experiment of peanut-picking device under interplanting pattern in orchard. Agric. Res. Arid. Areas 2021, 39, 224–229. [Google Scholar]
- Yu, X.D.; Guo, H.; Guo, W.H.; Xue, S.M.; Liu, H.S.; Ye, X.W. Design and motion simulation of pneumatic device for picking up ground jujube. J. Agric. Mech. Res. 2021, 43, 83–87. [Google Scholar]
- Liu, L.; Liu, D.Q.; Sun, Q.T.; Qian, K.; Li, X.J. Experiment and analysis of the harvest and picking ability of peanut. J. Agric. Mech. Res. 2022, 44, 139–144. [Google Scholar]
- Wang, M.; Yang, R.B.; Shang, S.Q.; Wang, F.J.; Wang, Z.Z. Design analysis and test of key equipment for fully fed peanut picking machine. J. Agric. Mech. Res. 2021, 43, 141–145. [Google Scholar]
- Yang, F.J.; Li, H.Q.; Li, Z.P.; Liu, Z.G.; Sun, Y.; Zhang, S.H.; Ma, C.Y. Design and research of 4HJZ-6 intelligent peanut picker. Agric. Equip. Veh. Eng. 2020, 58, 6–9. [Google Scholar]
- Zhang, J.F.; Wang, Z.G.; Jiang, L.M.; Chen, Y.L.; Yan, S.K.; Liu, C.P.; He, Z.P.; Zhou, J. Design and test of HSZ-10 half feed peanut picking machine. Jiangxi Sci. 2019, 37, 98–102. [Google Scholar]
- Xu, N.; Shang, S.Q.; Wang, D.W.; He, X.N.; Gao, Z.; Liu, J.Q.; Zhang, Y.D.; Guo, P. Design and research of spike tooth type peanut picking device with longitudinal. J. Agric. Mech. Res. 2020, 42, 197–201. [Google Scholar]
- Yang, H.G.; Cao, M.Z.; Wang, B.; Hu, Z.C.; Xu, H.B.; Wang, S.Y.; Yu, Z.Y. Design and test of a tangential-axial flow picking device for peanut combine harvesting. Agriculture 2022, 12, 179. [Google Scholar] [CrossRef]
- Zhang, P.; Xu, H.B.; Zhuo, X.R.; Hu, Z.C.; Lian, C.L.; Wang, B. Biotribological characteristic of peanut harvesting impact-friction contact under different conditions. Agronomy 2022, 12, 1256. [Google Scholar] [CrossRef]
- Xu, J.; Chen, M.N.; Chen, N.; Pan, L.J.; Wang, T.; Chen, Y.Z.; Hu, Z.C.; Zou, Z.F.; Yu, S.L.; Cui, F.G.; et al. Experimental study on peanut mechanized harvesting of huayu917. J. Peanut Sci. 2021, 50, 51–56. [Google Scholar]
- Qiu, L.J. Design Full-Feeding Method of High-Moisture Peanut Stripping Equipment and Experimental Analysis. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2014. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stubble Height (mm) | Total Mass of a Single Root Disk (g) | Pod Mass of a Single Root Disk (g) | Stem Dry Moisture Content (%) |
|---|---|---|---|
| 63.7 | 141.33 | 52.61 | 38.75 |
| Level | Linear Speed of Pod-Picking Roller V (m/s) | Clearance between the Concave Screen and Pod-Picking Roller G (mm) | Spacing between Pod-Picking Rods S1 (mm) |
|---|---|---|---|
| +1 | 9 | 4 | 250 |
| 0 | 7 | 3 | 200 |
| −1 | 5 | 2 | 150 |
| Test No. | Linear Speed of the Pod-Picking Roller X1 | Clearance between the Concave Screen and Pod-Picking Roller X2 | Spacing between Pod-Picking Rods X3 | Picking Rate Y1 (%) | Crushing Rate Y2 (%) |
|---|---|---|---|---|---|
| 1 | −1 | 0 | 1 | 98.02 | 1.15 |
| 2 | 0 | 0 | 0 | 99.38 | 0.89 |
| 3 | 0 | 0 | 0 | 99.44 | 0.94 |
| 4 | 1 | 0 | 1 | 97.34 | 1.53 |
| 5 | 0 | 1 | −1 | 98.12 | 0.99 |
| 6 | 1 | 0 | −1 | 99.26 | 1.20 |
| 7 | 1 | −1 | 0 | 99.58 | 1.61 |
| 8 | 0 | 0 | 0 | 99.21 | 0.93 |
| 9 | 0 | 1 | 1 | 97.27 | 1.06 |
| 10 | −1 | 0 | −1 | 98.14 | 0.97 |
| 11 | 0 | −1 | −1 | 99.57 | 1.18 |
| 12 | 0 | 0 | 0 | 99.58 | 1.02 |
| 13 | −1 | 1 | 0 | 97.88 | 0.92 |
| 14 | 1 | 1 | 0 | 98.34 | 1.21 |
| 15 | 0 | −1 | 1 | 97.32 | 1.35 |
| 16 | −1 | −1 | 0 | 98.87 | 1.09 |
| 17 | 0 | 0 | 0 | 99.25 | 0.93 |
| Source | Sum of Squares | Degree of Freedom | Mean Square | F-Value | p-Value |
|---|---|---|---|---|---|
| Model | 11.47 | 9 | 1.27 | 24.59 | 0.0002 |
| X1 | 0.32 | 1 | 0.32 | 6.25 | 0.0410 |
| X2 | 1.74 | 1 | 1.74 | 33.56 | 0.0007 |
| X3 | 3.30 | 1 | 3.30 | 63.73 | <0.0001 |
| X1X2 | 0.016 | 1 | 0.016 | 0.30 | 0.6000 |
| X1X3 | 0.81 | 1 | 0.81 | 15.63 | 0.0055 |
| X2X3 | 0.49 | 1 | 0.49 | 9.46 | 0.0179 |
| X12 | 0.36 | 1 | 0.36 | 6.94 | 0.0337 |
| X22 | 0.72 | 1 | 0.72 | 13.81 | 0.0075 |
| X32 | 3.33 | 1 | 3.33 | 64.32 | <0.0001 |
| Residual | 0.36 | 7 | 0.052 | ||
| Lack of fit | 0.27 | 3 | 0.091 | 4.10 | 0.1033 |
| Pure error | 0.089 | 4 | 0.022 | ||
| Cor Total | 11.83 | 16 |
| Source | Sum of Squares | Degree of Freedom | Mean Square | F-Value | p-Value |
|---|---|---|---|---|---|
| Model | 0.71 | 9 | 0.079 | 22.72 | 0.0002 |
| X1 | 0.25 | 1 | 0.25 | 72.89 | <0.0001 |
| X2 | 0.14 | 1 | 0.14 | 39.85 | 0.0004 |
| X3 | 0.070 | 1 | 0.070 | 20.33 | 0.0028 |
| X1X2 | 0.013 | 1 | 0.013 | 3.82 | 0.0914 |
| X1X3 | 0.0056 | 1 | 0.0056 | 1.63 | 0.2428 |
| X2X3 | 0.0025 | 1 | 0.0025 | 0.72 | 0.4233 |
| X12 | 0.12 | 1 | 0.12 | 33.76 | 0.0007 |
| X22 | 0.041 | 1 | 0.041 | 11.93 | 0.0106 |
| X32 | 0.046 | 1 | 0.046 | 13.17 | 0.0084 |
| Residual | 0.024 | 7 | 0.0035 | ||
| Lack of fit | 0.015 | 3 | 0.005 | 2.22 | 0.2281 |
| Pure error | 0.0091 | 4 | 0.0023 | ||
| Cor Total | 0.73 | 16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Lü, Q.; Yang, L.; Li, G. Design and Test of Peanut Root-Disk Full-Feeding Longitudinal Axial Flow Pod-Picking Device. Agronomy 2023, 13, 1103. https://doi.org/10.3390/agronomy13041103
Liu X, Lü Q, Yang L, Li G. Design and Test of Peanut Root-Disk Full-Feeding Longitudinal Axial Flow Pod-Picking Device. Agronomy. 2023; 13(4):1103. https://doi.org/10.3390/agronomy13041103
Chicago/Turabian StyleLiu, Xiaodong, Qingqing Lü, Liquan Yang, and Guangxi Li. 2023. "Design and Test of Peanut Root-Disk Full-Feeding Longitudinal Axial Flow Pod-Picking Device" Agronomy 13, no. 4: 1103. https://doi.org/10.3390/agronomy13041103
APA StyleLiu, X., Lü, Q., Yang, L., & Li, G. (2023). Design and Test of Peanut Root-Disk Full-Feeding Longitudinal Axial Flow Pod-Picking Device. Agronomy, 13(4), 1103. https://doi.org/10.3390/agronomy13041103