
Design and Experiment of an Unmanned Variable-Rate Fertilization Control System with Self-Calibration of Fertilizer Discharging Shaft Speed

 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Systems Design
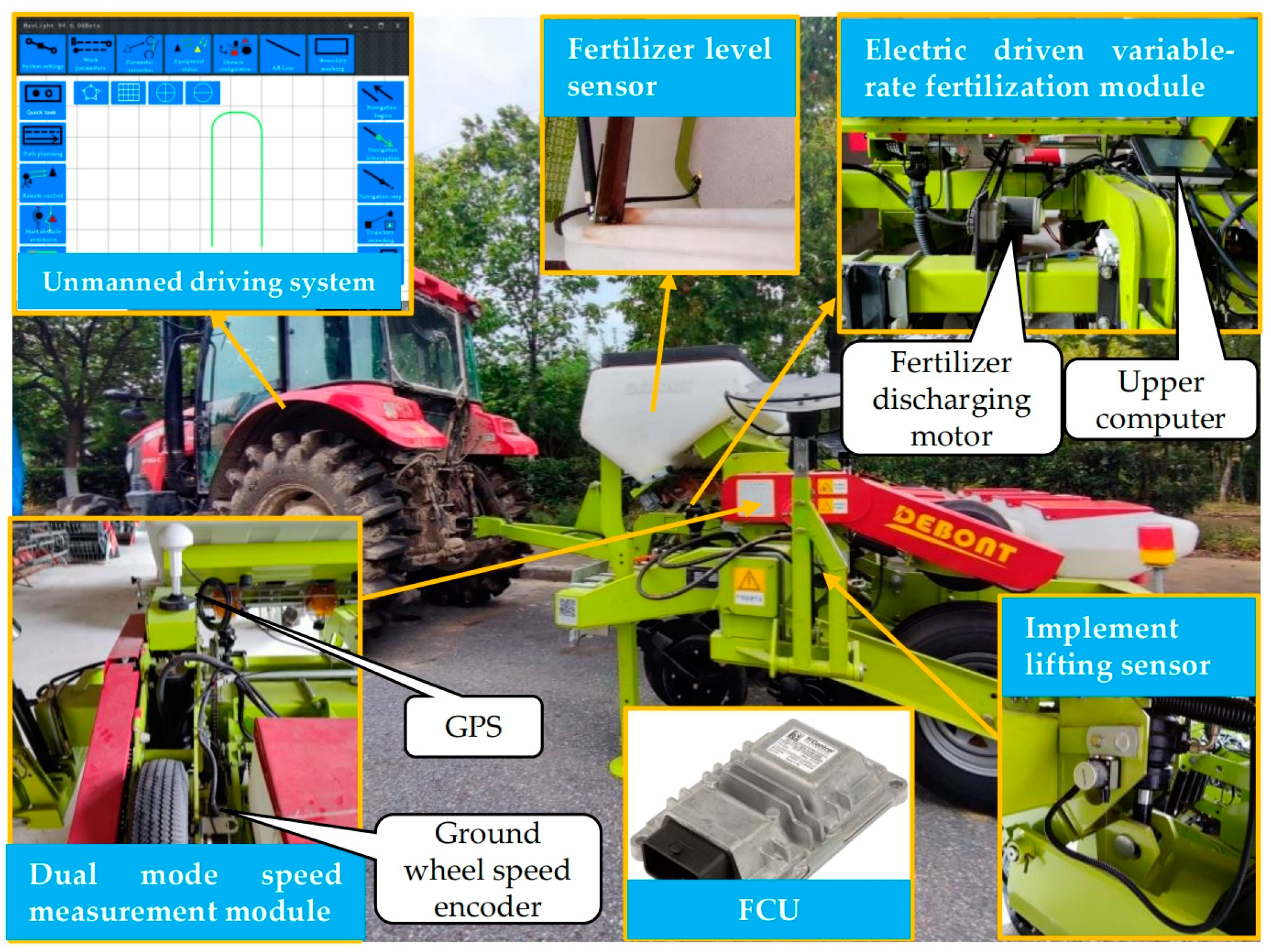
2.1.1. System Composition and Working Principle
2.1.2. Unmanned Driving System for Tractors
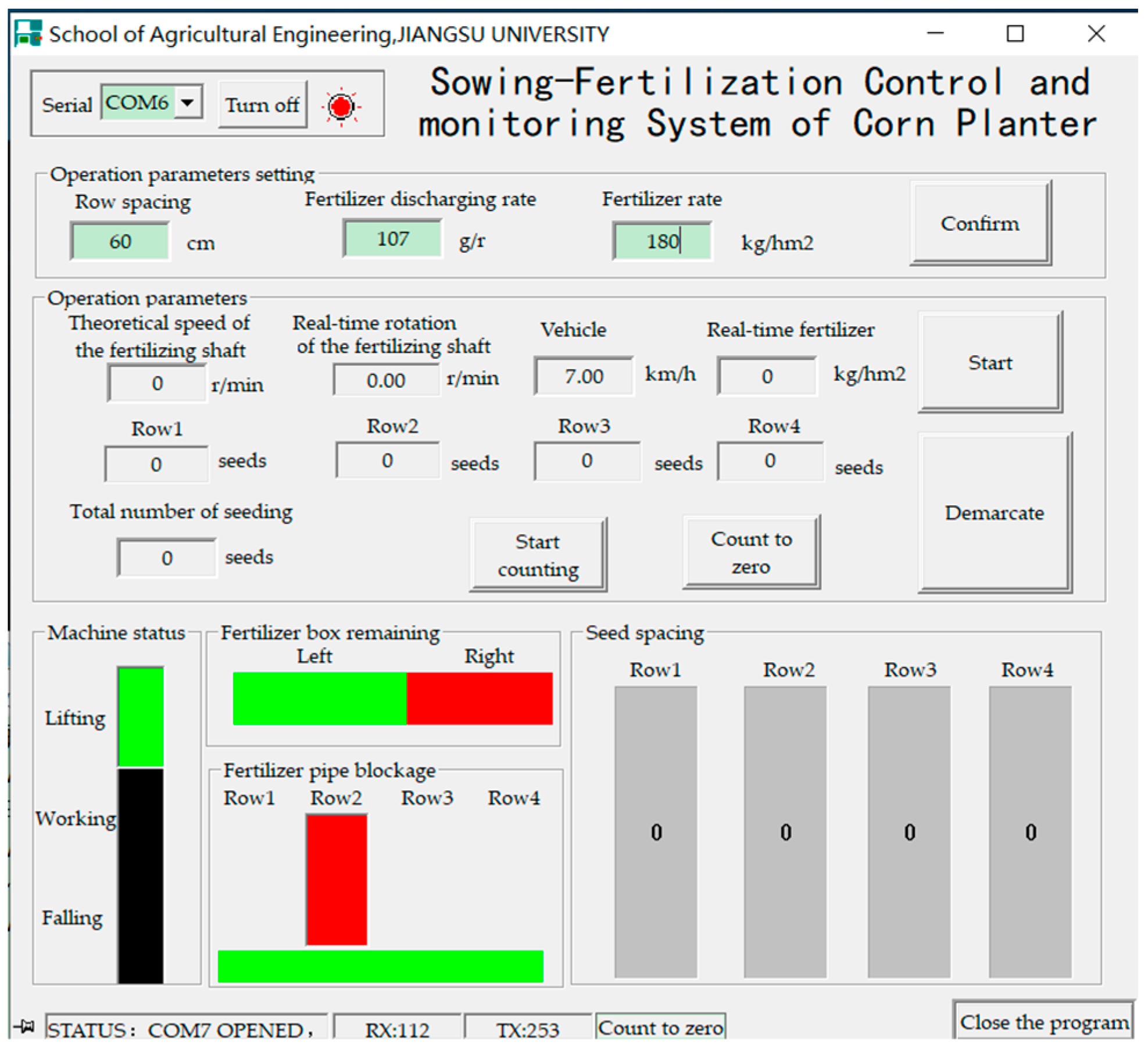
2.1.3. Variable-Rate Fertilization Control System
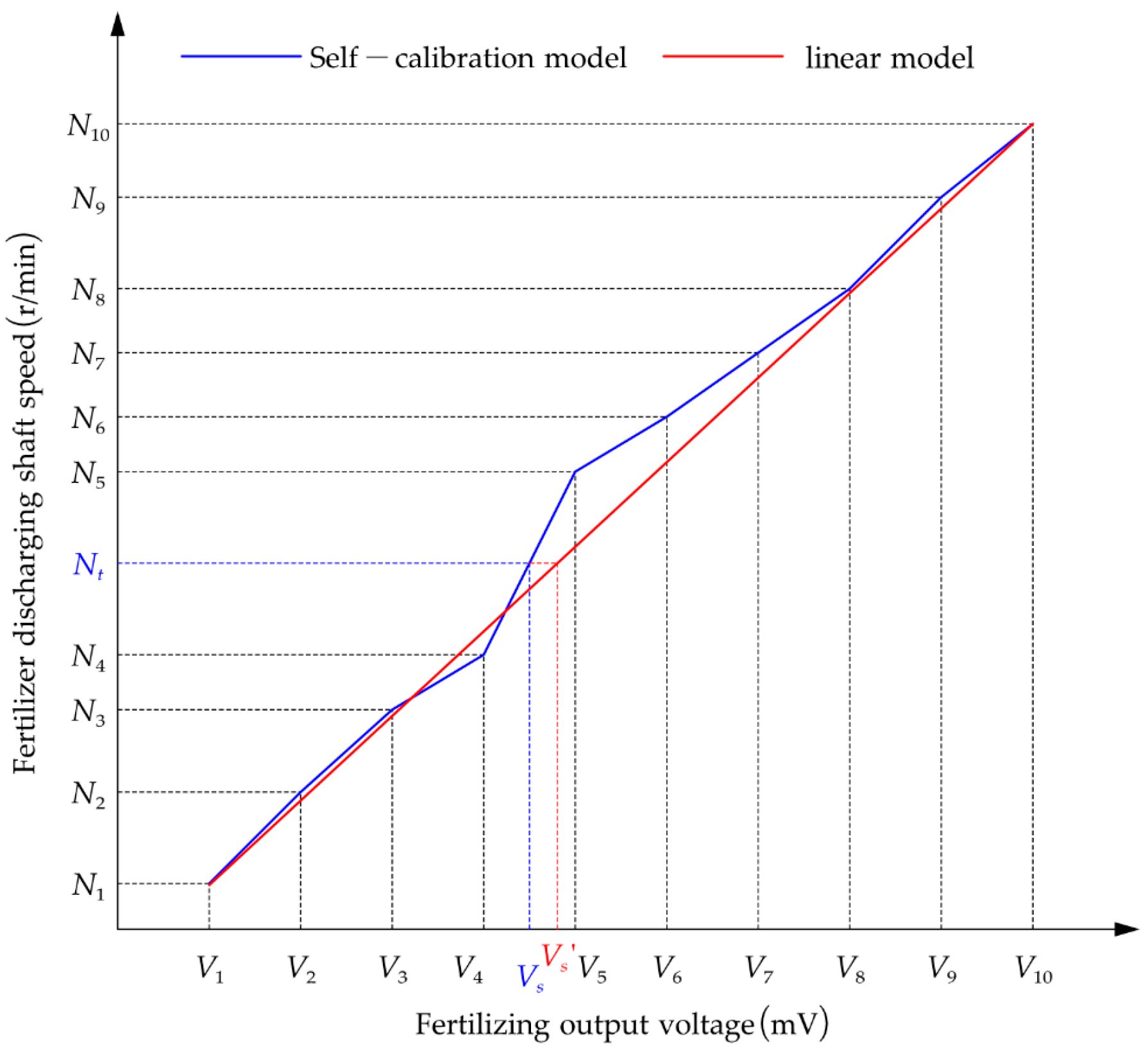
2.1.4. Design of Self-Calibration Program for the Fertilizer Discharging Shaft Speed
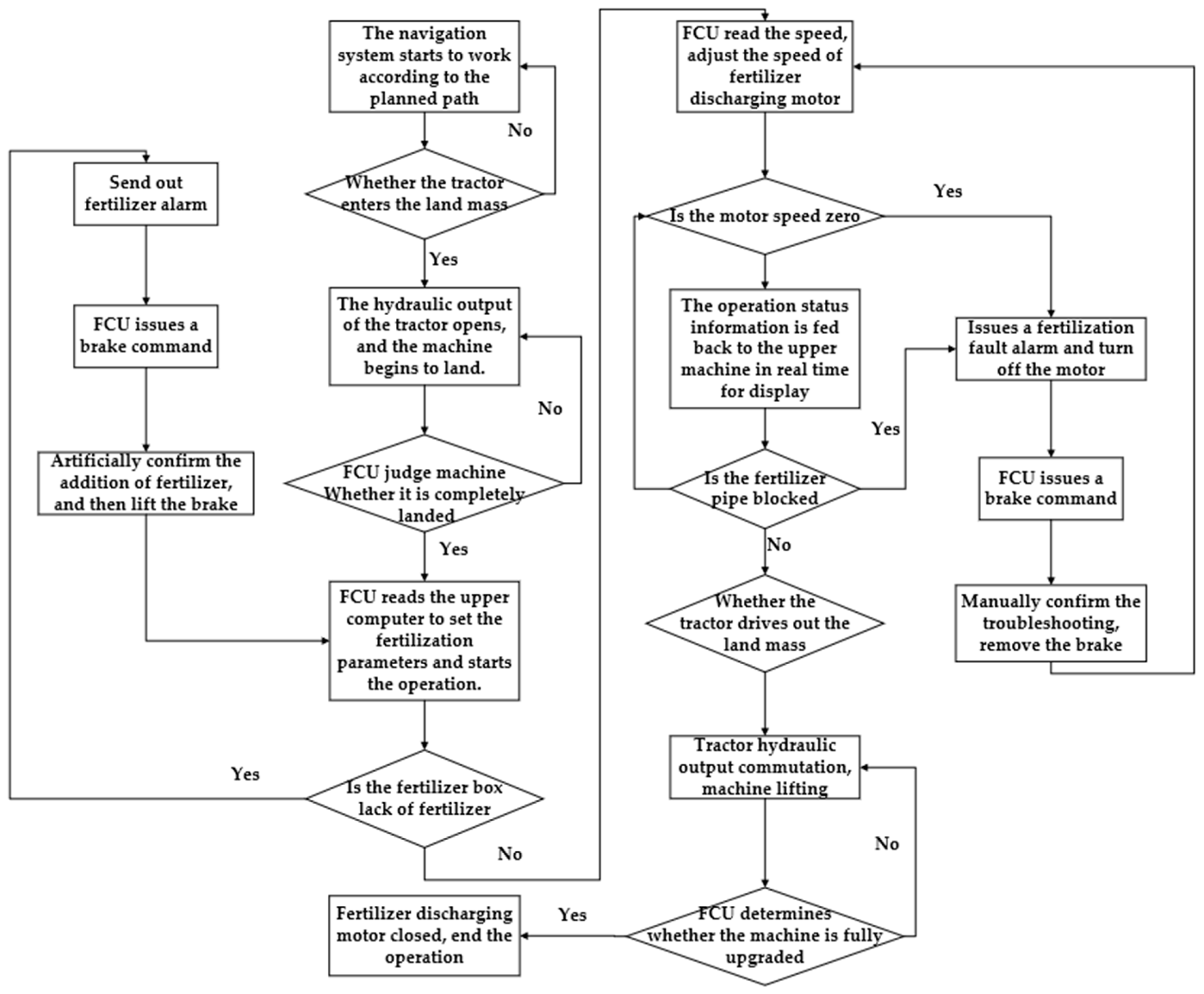
2.1.5. System Workflow
2.2. Test Method
2.2.1. Calibration Test of Fertilization Amount
2.2.2. Speed Response Test of Fertilizer Discharging Motor
2.2.3. Fertilization Status Detection Test
2.2.4. Fertilization Amount Control Accuracy Test
3. Results
3.1. Calibration Test Results of Fertilization Amount
3.2. Speed Response Test Results of Fertilizer Discharging Motor
3.3. Fertilization Status Detection Test Rusults
3.4. Fertilization Amount Control Accuracy Test Rusults
4. Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tang, H.; Wang, J.; Xu, C.; Zhou, W.; Wang, J.; Wang, X. Research progress analysis on key technology of chemical fertilizer reduction and efficiency increase. Trans. Chin. Soc. Agric. Mach. 2019, 50, 1–19. [Google Scholar] [CrossRef]
- Rotundo, J.L.; Rech, R.; Cardoso, M.M.; Fang, Y.; Tang, T.; Olson, N.; Pyrik, B.; Conrad, G.; Borras, L.; Mihura, E.; et al. Development of a decision-making application for optimum soybean and maize fertilization strategies in Mato Grosso. Comput. Electron. Agric. 2022, 193, 106659. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, G.; Zhang, D.; Jiang, B.; Ren, Z. Research status and prospect on granular fertilizer variable-rate control technology. Jiangsu Agric. Sci. 2022, 50, 69–77. [Google Scholar]
- Ren, L.; Tian, M.; Li, J.; Zhan, C. Research status and development analysis of variable fertilization technology in China. J. Agric. Mech. Res. 2023, 45, 10–15. [Google Scholar] [CrossRef]
- Zhao, C.; Fan, B.; Li, J.; Feng, Q. Agricultural robots: Technology progress, challenges and trends. Smart Agric. 2023, 5, 1–15. [Google Scholar] [CrossRef]
- Liu, X.; Hu, R.; Wang, D.; Lu, B.; Wang, W. Optimization and test of fertilizer apparatus based on granular fertilizer movement model. Trans. Chin. Soc. Agric. Mach. 2021, 52, 85–95. [Google Scholar] [CrossRef]
- Dun, G.; Liu, W.; Wu, X.; Mao, N.; Ji, W.; Ma, H. Simulation optimization and experiment of screw extrusion precision fertilizer ejector. J. Jilin Univ. (Eng. Technol. Ed.) 2023, 53, 3026–3037. [Google Scholar] [CrossRef]
- Zhang, X. Optimization Design and Key Working Parameters of External trough Wheel Type Fertilizer Effect on Fertilizer Performance. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, 2019. [Google Scholar]
- Shi, Y.; Chen, M.; Wang, X.; Odhiambo, M.R.O.; Zhang, Y.; Ding, W. Analysis and experiment of fertilizing performance for precision fertilizer applicator in rice and wheat fields. Trans. Chin. Soc. Agric. Mach. 2017, 48, 97–103. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, G.; Hu, H.; Hang, J.; Jiu, Y. Influence of control sequence of spiral fluted roller fertilizer distributer on fertilization performance. Trans. Chin. Soc. Agric. Mach. 2020, 51, 137–144. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, G.; Hu, H.; Hang, J. Development of bivariate fertilizer control system via independent control of fertilizing unit. Trans. Chin. Soc. Agric. Eng. 2021, 37, 38–45. [Google Scholar] [CrossRef]
- Zhao, S.; Zong, Z.; Liu, G. Design and test on position fertilization control system based on motor drive. Trans. Chin. Soc. Agric. Mach. 2019, 50, 91–95. [Google Scholar] [CrossRef]
- Song, X.; Li, H.; Chen, C.; Xia, H.; Zhang, Z.; Tang, P. Design and experimental testing of a control system for a solid-fertilizer-dissolving device based on fuzzy PID. Agriculture 2022, 12, 1382. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, S.; Ji, W.; Zhu, B.; Zheng, P. Precision fertilization control system research for solid fertilizers based on incremental PID control algorithm. Trans. Chin. Soc. Agric. Mach. 2021, 52, 99–106. [Google Scholar] [CrossRef]
- Bai, J.; Tian, M.; Li, J. Analysis and precision test of variable fertilization control system. J. Agric. Mech. Res. 2022, 44, 22–28. [Google Scholar] [CrossRef]
- Zhu, Q.; Zhu, Z.; Zhang, H.; Gao, Y.; Chen, L. Design of an electronically controlled fertilization system for an air-assisted side-deep fertilization machine. Agriculture 2023, 13, 2210. [Google Scholar] [CrossRef]
- Akhter, Z.; Taha, W.; Rahman, M.S.U.; Abou-Khousa, M.A. Detection of solid contaminants in gas flows using microwave resonant probes. Meas. Sci. Technol. 2021, 32, 035109. [Google Scholar] [CrossRef]
- Jia, H.; Wen, X.; Wang, G.; Liu, H.; Guo, H. Design and experiment of mass flow sensor for granular fertilizer. Trans. Chin. Soc. Agric. Mach. 2020, 51, 130–136. [Google Scholar] [CrossRef]
- Yang, L.; Zhao, L.; Zhang, J.; Lu, S.; Hou, C.; Liu, G. Particle fertilizer mass flow measurement based on microwave method. Trans. Chin. Soc. Agric. Mach. 2023, 54, 323–329. [Google Scholar]
- Shi, Y.; Chen, M.; Wang, X.; Yang, H.; Yu, H.; Hao, X. Efficiency analysis and evaluation of centrifugal variable-rate fertilizer spreading based on real-time spectral information on rice. Comput. Electron. Agric. 2023, 204, 107505. [Google Scholar] [CrossRef]
- He, Y.; Yang, X.; Zhai, C.; Zhao, X.; Dou, H.; Wang, X. Design and experiment of air-assisted layered fertilization machine of centralized distributing for corn. Trans. Chin. Soc. Agric. Mach. 2020, 51, 54–63. [Google Scholar] [CrossRef]
- Jin, Y.; Liu, J.; Xu, Z.; Yuan, S.; Li, P.; Wang, J. Development status and trend of agricultural robot technology. Int. J. Agric. Biol. Eng. 2021, 14, 1–19. [Google Scholar] [CrossRef]
- Li, J.; Shang, Z.; Li, R.; Cui, B. Adaptive sliding mode path tracking control of unmanned rice transplanter. Agriculture 2022, 12, 1225. [Google Scholar] [CrossRef]
- Zhu, Z.; Zeng, L.; Chen, L.; Zou, R.; Cai, Y. Fuzzy adaptive energy management strategy for a hybrid agricultural tractor equipped with HMCVT. Agriculture 2022, 12, 1986. [Google Scholar] [CrossRef]
- Huang, W.; Wei, X.; Wang, A.; Ji, X.; Gao, Y.; Wang, Y.; Shi, S. Straight line path tracking control of agricultural tractor-trailer based on fuzzy fast sliding mode. Trans. Chin. Soc. Agric. Mach. 2024, 55, 415–422. [Google Scholar] [CrossRef]
- Liu, Y. Research on Flow Control System of Solid Fertilizer Assembly. Master’s Thesis, Chinese Academy of Agricultural Mechanization Sciences, Beijing, China, 2022. [Google Scholar]
- Zhang, Y.; Zhang, K.; Yu, Y.; Zhang, D.; Yang, L.; Cui, T.; He, X. Remnant fertilizer monitoring system for maize fertilizer applicators. Int. J. Agric. Biol. Eng. 2023, 16, 173–180. [Google Scholar] [CrossRef]
- Zhao, X.; Jin, X.; Zhou, W.; Zhai, C.; Zhang, C.; Wang, X. Design and experiment of double speed measurement mode of corn topdressing control system based on spectral information. Trans. Chin. Soc. Agric. Mach. 2020, 51, 145–153. [Google Scholar] [CrossRef]
- ISO 11783-9-2012; Serial Tractors and Machinery for Agriculture and Forestry—Serial Control and Communications Data Network—Part 9: Tractor ECU. International Organization for Standardization: Geneva, Switzerland, 2012.
- GB/T 35487-2017; Variable Fertilizing and Seeding Machine Control System. The General Administration of Quality Supervision, Inspection and Quarantine of the People’s Republic of China (AQSIQ) and the Standardization Administration (SAC) of the People’s Republic of China: Beijing, China, 2017.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ECU | PGN | SA | Data Length | Data Meaning |
|---|---|---|---|---|
| PC 1 | 00EA64 | 26 | 8 | DATA1: Fertilization calibration control, Stop 0x00, Start 0x01; DATA2–DATA3: Simulated voltage initial value, 0–65,536 mV; DATA4–DATA5: Simulated voltage peak value, 0–65,536 mV; DATA6–DATA7: Conversion coefficient, 0–65,536; DATA8: Reserved position |
| FCU 2 | 00EB26 | 64 | 8 | DATA1–DATA2: Feedback speed for the first fertilizer discharge calibration; DATA3–DATA4: Motor voltage for the first fertilizer discharge calibration; DATA5–DATA6: Feedback speed for the second fertilizer discharge calibration; DATA7–DATA8: Motor voltage for the second fertilizer discharge calibration |
| FCU 2 | 00ED26 | 64 | 8 | DATA1: Machine status, Working 0x00, Lifting 0x01, Falling 0x02; DATA2-DATA3: Two fertilizer boxes remaining, Normal 0x00, Deficiency 0x01; DATA4–DATA7: Fertilization pipes (1–4) blockage condition, Normal 0x00, Blockage 0x01; DATA8: Reserved position |
| FCU 2 | 00EE1C | 64 | 8 | DATA1: Tractor reversing request, Parking 0x00, Drive 0x01, Reverse 0x02; DATA2: Tractor Brake Request, Release the brake 0x00, Brake 0x01; DATA3: Ground wheel lifting request, Stop 0x00, Lifting 0x01, Falling 0x02; DATA4: Suspension height request, 0~100%, 0.4%/bit; DATA5–DATA8: Reserved position |
| FCU 2 | 00E926 | 64 | 2 | DATA1–DATA2: Vehicle speed, 0–64.255 km/h, 0.001 (km/h)/bit |
| Nt (r·min−1) | Row | xi (g/r) | (g/r) | S (g/r) | V (%) |
|---|---|---|---|---|---|
| 15 | 1 | 125.37 | 121.35 | 19.08 | 15.72 |
| 2 | 102.19 | ||||
| 3 | 111.68 | ||||
| 4 | 146.16 | ||||
| 30 | 1 | 116.24 | 113.34 | 19.77 | 17.44 |
| 2 | 93.81 | ||||
| 3 | 103.70 | ||||
| 4 | 139.60 | ||||
| 45 | 1 | 98.52 | 99.29 | 15.79 | 15.90 |
| 2 | 82.17 | ||||
| 3 | 96.11 | ||||
| 4 | 120.36 |
| Vehicle Speed (km/h) | Control Model | Ts (s) | ess (r/min) | σ (%) |
|---|---|---|---|---|
| 4 | self-calibration model | 0.4 | 0.08 | 4.22 |
| linear model | 0.5 | 0.26 | 6.23 | |
| 6 | self-calibration model | 0.5 | 0.23 | 8.02 |
| linear model | 0.6 | 0.37 | 10.45 | |
| 8 | self-calibration model | 0.3 | 0.08 | 5.14 |
| linear model | 0.8 | 0.45 | 5.32 |
| qt (kg/hm2) | l (m) | m (g) | qa (kg/hm2) | δ (%) | (%) |
|---|---|---|---|---|---|
| 150 | 39.08 | 1361.7 | 145.18 | 3.21 | 2.87 |
| 40.40 | 1410.8 | 145.49 | 3.01 | ||
| 39.90 | 1402.2 | 146.43 | 2.38 | ||
| 225 | 39.61 | 2186.7 | 230.05 | 2.24 | 1.40 |
| 39.18 | 2110.7 | 224.48 | 0.23 | ||
| 39.33 | 2160.5 | 228.86 | 1.72 | ||
| 300 | 40.27 | 2831.7 | 293.00 | 2.33 | 1.45 |
| 39.94 | 2832.9 | 295.56 | 1.48 | ||
| 39.24 | 2840.4 | 301.63 | 0.54 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Feng, K.; Yang, S.; Han, X.; Wei, X.; Zhu, Q.; Chen, L. Design and Experiment of an Unmanned Variable-Rate Fertilization Control System with Self-Calibration of Fertilizer Discharging Shaft Speed. Agronomy 2024, 14, 2336. https://doi.org/10.3390/agronomy14102336
Gao Y, Feng K, Yang S, Han X, Wei X, Zhu Q, Chen L. Design and Experiment of an Unmanned Variable-Rate Fertilization Control System with Self-Calibration of Fertilizer Discharging Shaft Speed. Agronomy. 2024; 14(10):2336. https://doi.org/10.3390/agronomy14102336
Chicago/Turabian StyleGao, Yuanyuan, Kangyao Feng, Shuo Yang, Xing Han, Xinhua Wei, Qingzhen Zhu, and Liping Chen. 2024. "Design and Experiment of an Unmanned Variable-Rate Fertilization Control System with Self-Calibration of Fertilizer Discharging Shaft Speed" Agronomy 14, no. 10: 2336. https://doi.org/10.3390/agronomy14102336