
Discrete Element Method–Multibody Dynamics Coupling Simulation and Experiment of Rotary Tillage and Ridging Process for Chili Pepper Cultivation


Abstract
:1. Introduction
2. Agronomic Requirements and Structural Design
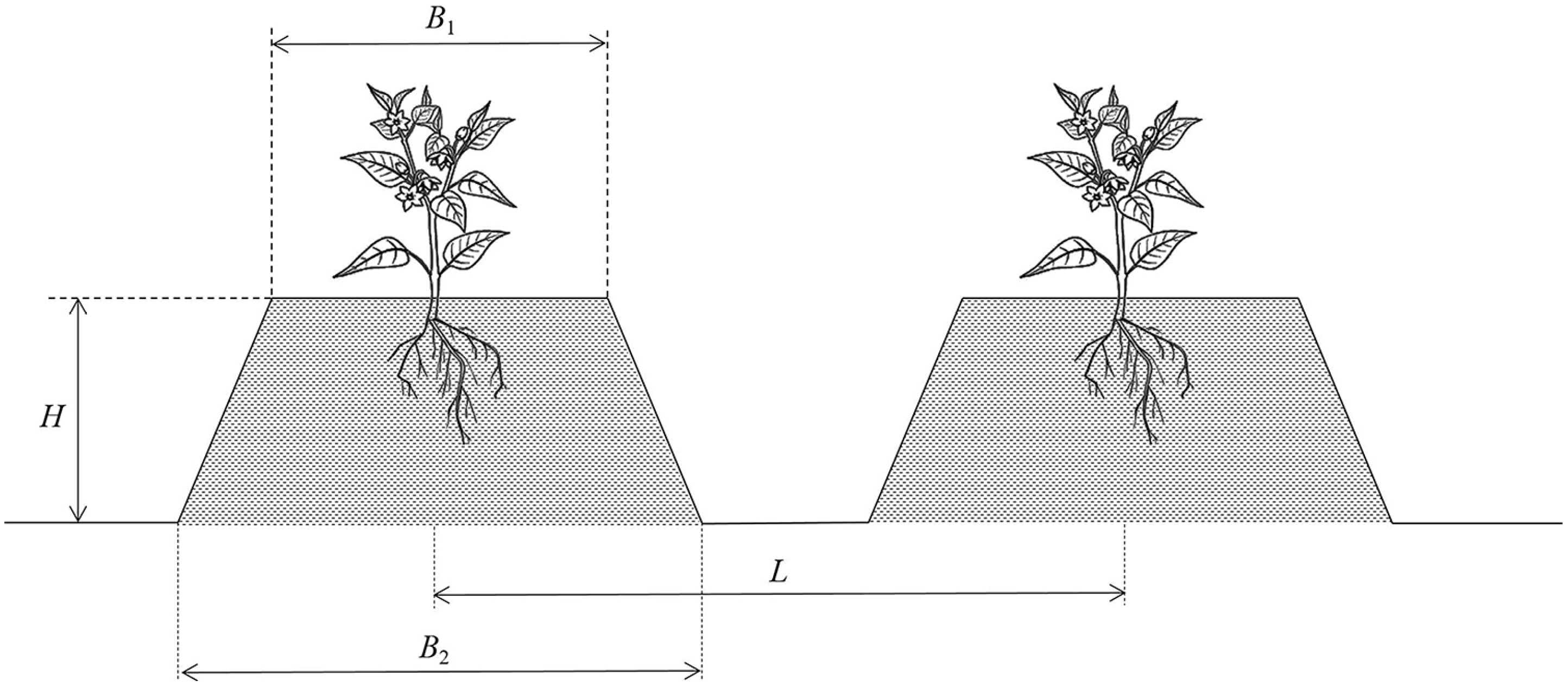
2.1. Agronomic Requirements for Chili Pepper Ridging
2.2. Machine Structure and Working Principle
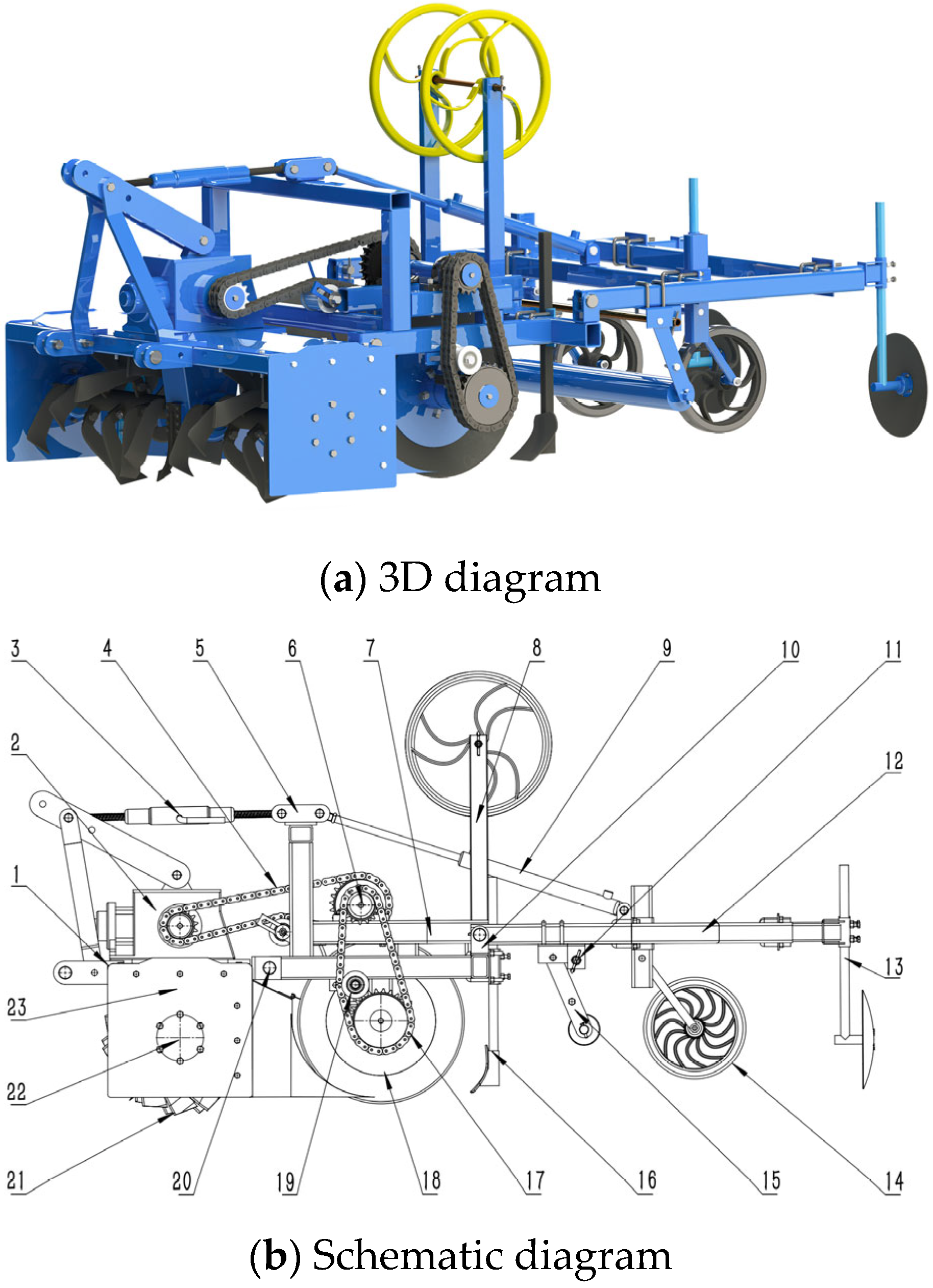
2.2.1. Machine Structure
2.2.2. Working Principle
2.3. Design and Parameter Calculation of the Rotary Tillage and Ridging Device
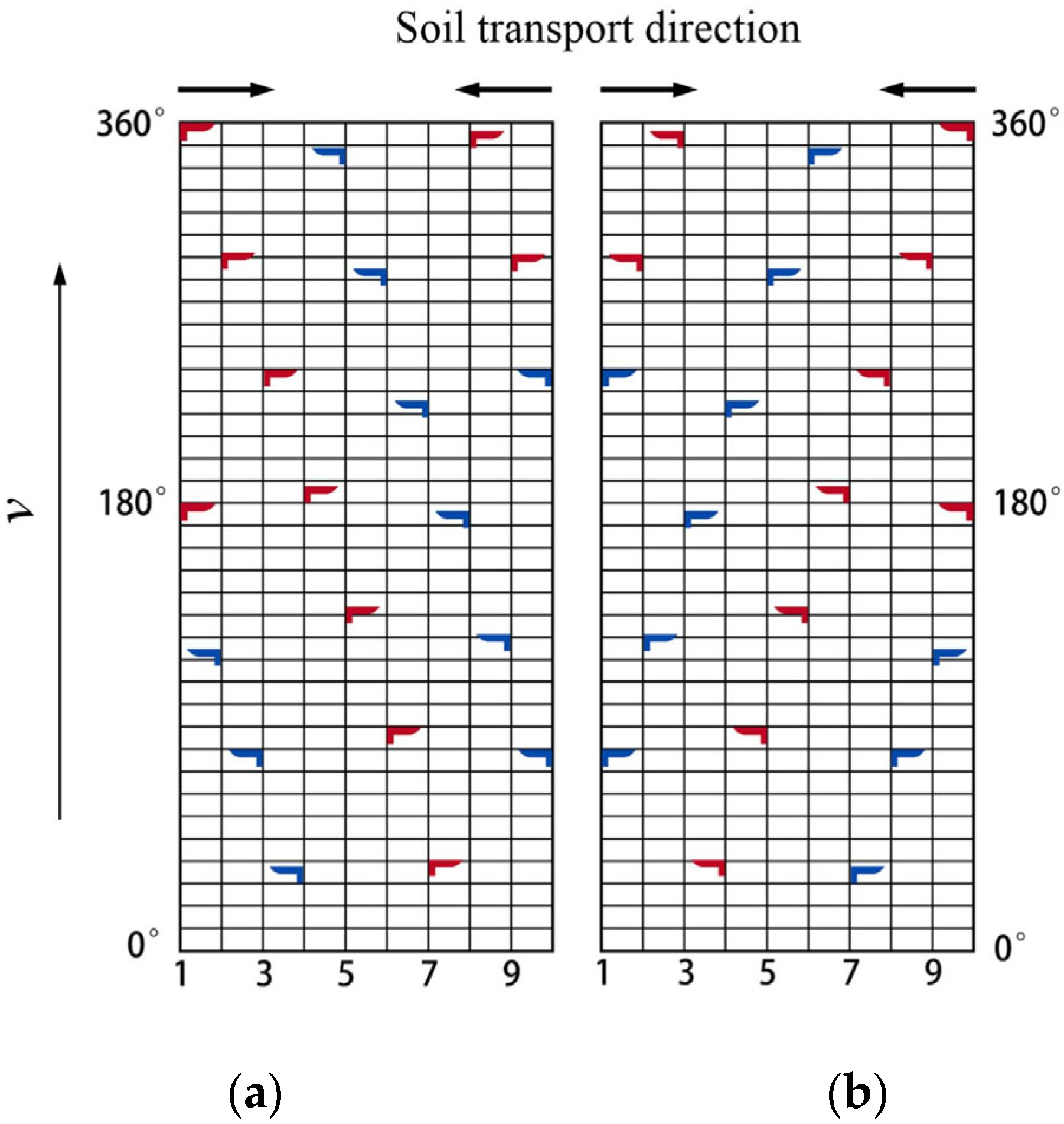
2.3.1. Arrangement of Rotary Tillage Blades
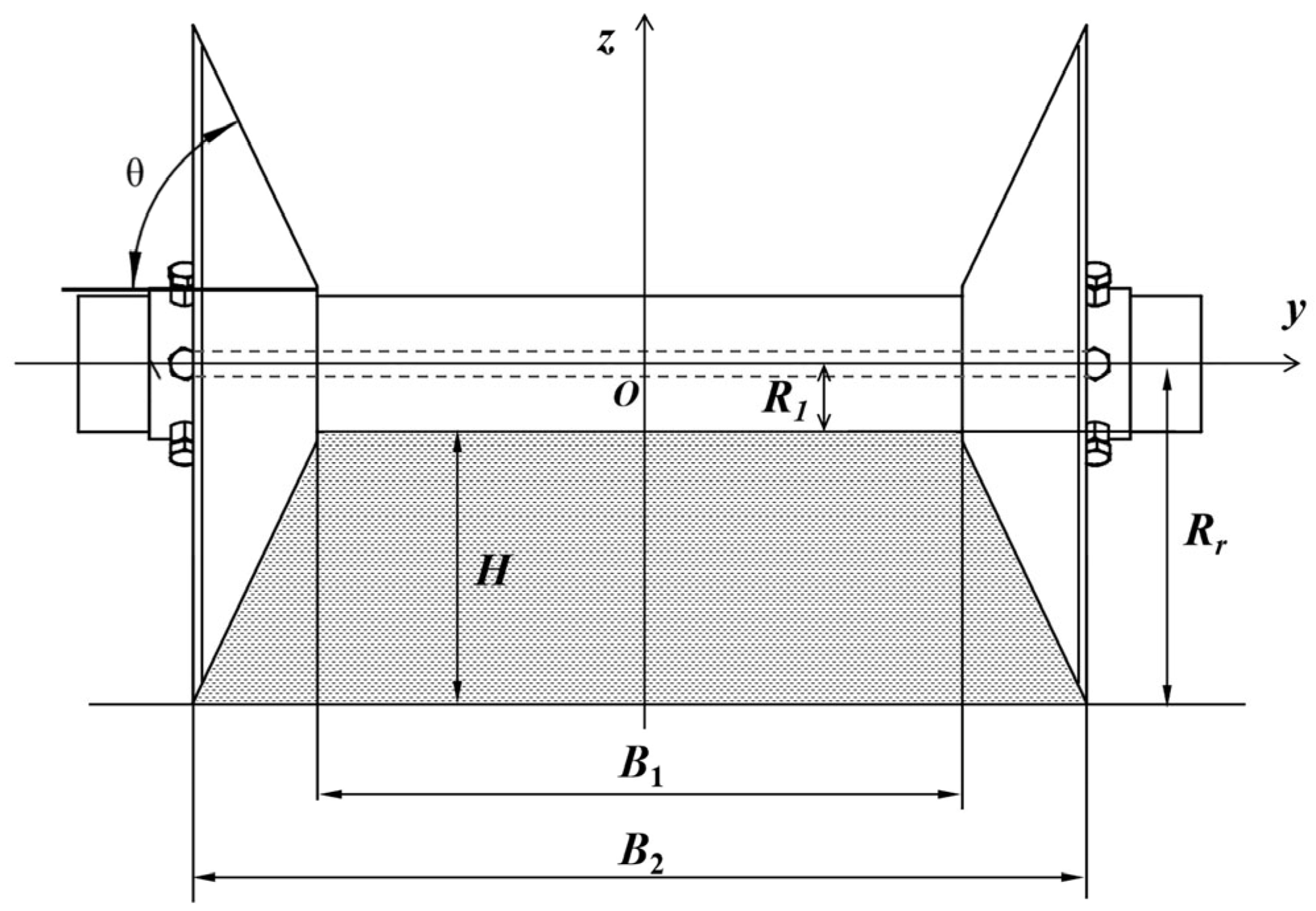
2.3.2. Design of Stemming Roller Group
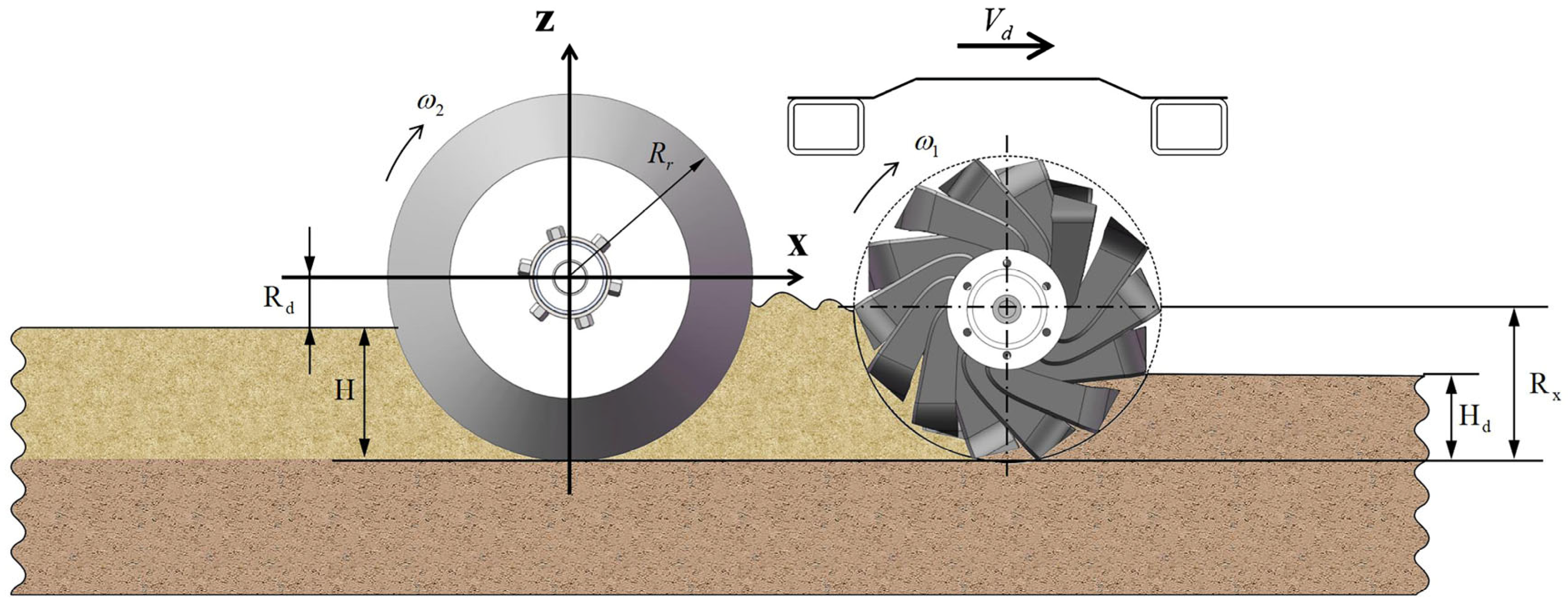
2.3.3. Rotary Tillage Depth
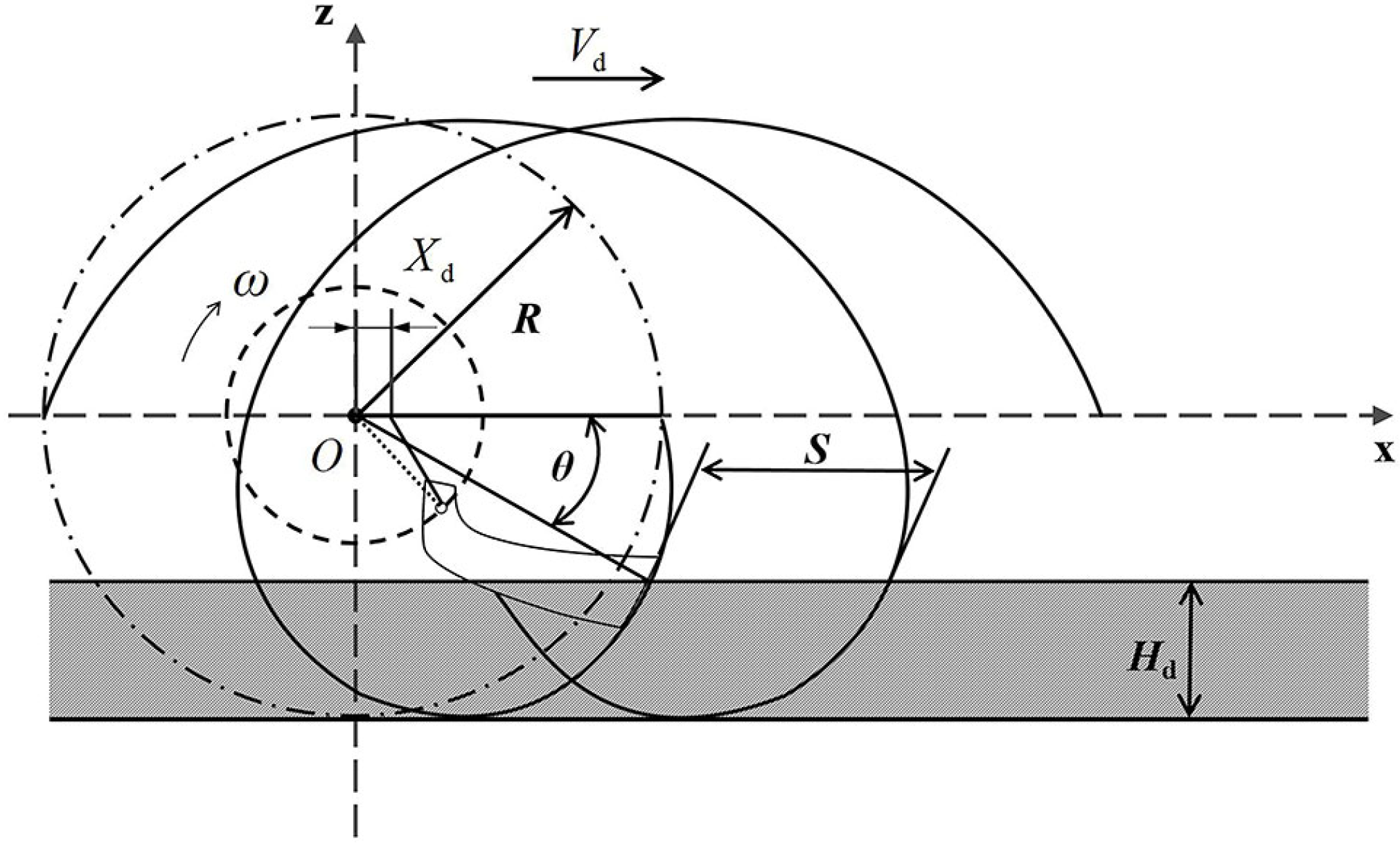
2.3.4. Cutting Pitch
2.3.5. Stalking Roller Group Speed
3. Simulation of Rotary Tillage and Ridging Operation Process
3.1. Simulation-Related Parameter Settings
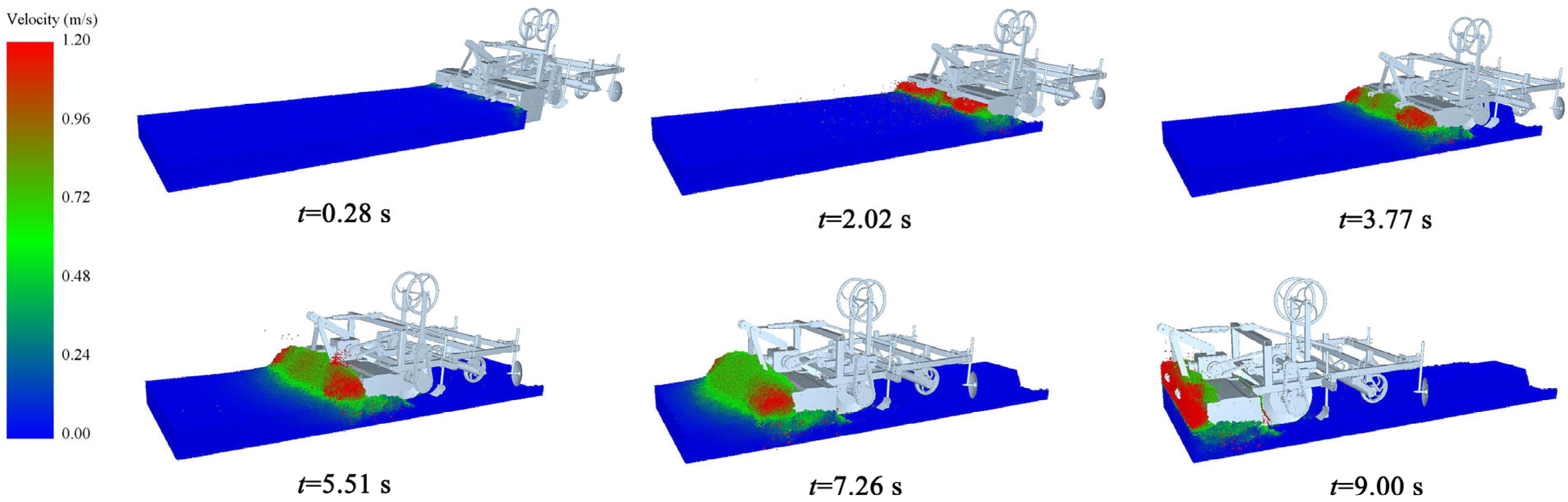
3.2. EDEM-RecurDyn Model Construction
3.3. Simulation Results and Analysis
3.3.1. Experimental Program and Results
3.3.2. Results and Regression Analysis
3.3.3. Response Surface Analysis
4. Field Verification Test
4.1. Test Scheme
4.2. Test Results and Analysis
5. Conclusions
- Aiming at the agronomic requirements and planting mode of chili pepper ridging in the dry zone of Northwest China, a chili pepper rotary tillage and ridging and mulching machine was designed which can realize the integrated operation of rotary tillage, ridging, and film spreading. The theoretical analysis and parameter calculation of the rotary tillage and seeding operation process were completed, and the main parameters such as the arrangement of rotary tillage knives, the cutting pitch of the rotary tillage device, and the running trajectory of the knife blade were determined.
- Based on DEM-MBD coupled simulation analysis, the central combination test was conducted with the rotary tillage depth, rotational speed of the stalking roller set, forward speed of the implements as the test factors and traction resistance of the stalking roller set and soil firmness as the test indexes. The regression equations were established, and the optimal parameter combinations were determined as follows: the rotary tillage depth was 176 mm, the rotational speed of the stalking roller set was 283.71 r/min, the forward speed of the implement was 0.55 m/s, the soil firmness was 61.26 KPa, and the traction resistance of the stalking roller set was 627.15 N under the same conditions.
- A field test showed that the effect of the chili pepper rotary ploughing machine is good. The average width of the top of the ridge, the width of the bottom of the ridge, the height of the ridge, the spacing of the ridge, the flatness of the ridge, and the width of the film edge of the mulch were 549.2 mm, 750.5 mm, 222.9 mm, 1173.1 mm, 12.31 mm, and 76.3 mm. The coefficients of stability of the dimensional parameters of the ridge were higher than 91.73%, and the stability of the soil firmness of the ridge was 66.82 KPa. The soil firmness of the ridge was 66.82 KPa, and all the indexes met the agronomic requirements for the chili pepper rotary tillage and ridging process. The design of the chili pepper rotary tillage and ridging mulching integrated machine has effectively improved the operational efficiency of the rotary tillage and ridging processes, resulting in increased yield and quality of chili pepper ridging cultivation and efficient utilization of resources. It contributes to environmental protection and the development of sustainable agriculture.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhu, L.; Xue, X.R.; Liang, Z.X.; Xu, L.Y.; Yu, G.F.; Tang, Y.; Li, H.X. Correlation between capsaicin content and agronomic traits in pepper (Capsicum annuum L.) germplasm resources. Acta Agric. Zhejiangensis 2023, 35, 862–872. [Google Scholar] [CrossRef]
- Ding, Y.; Liu, Y.Y. Effects of plastic mulching cultivation methods on the growth and soil nutrients of peppers in open fields in northern Jiangsu Province. Hubei Agric. Sci. 2023, 62, 115–118. [Google Scholar] [CrossRef]
- Fu, J.; Feng, Y.; Lang, X.J.; Wu, P.H. Design and Test of Rotary Tilling Ridger of Puerarialobata. J. Agric. Mech. Res. 2021, 43, 88–90+163. [Google Scholar] [CrossRef]
- Wu, C.B.; Li, Z.J.; Zhang, F.G.; Wang, D.L.; Dai, H.F.; Yuan, K. Research Status of Ridging Machinery and Its Application in Tobacco Production in Hilly and Mountainous Areas. Mod. Agric. Sci. Technol. 2022, 13, 100–107. [Google Scholar] [CrossRef]
- Wu, Y.W. Design and Experiment of an Integrated Machine for Tobacco Ridging, Fertilizing and Shaping. Master’s Thesis, Henan Agricultural University, Zhengzhou, China, 2021. [Google Scholar]
- Yu, F. The Design and Test of Trenching and Ridging Machine for Strawberry Planting in Greenhouse. Master’s Thesis, Anhui Agricultural University, Hefei, China, 2020. [Google Scholar]
- Sun, Z.J. Design and Experimental Study of Disk Type Potato Cultivator. Master’s Thesis, Heilongjiang Bayi Agricultural University, Daqing, China, 2021. [Google Scholar]
- Liu, Q.H. Design and Experiment of Key Device of Plowshare Potato Cultivator. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2022. [Google Scholar]
- Wang, H.N.; Yi, J.G. Design and research of a shed electric tracked rotary cultivation and integral working machine. J. Hebei Agric. Univ. 2020, 43, 116–125. [Google Scholar]
- Li, Z.L. Design and Experiment of Potato Trenching and Ridge Raising Device. Master’s Thesis, Huazhong Agricultural University, Wuhan, China, 2023. [Google Scholar] [CrossRef]
- Chen, X.T. Design and Test of Successive Compaction Device of Tobacco Ridging, Fertilization and Compaction Machine. Master’s Thesis, Henan Agricultural University, Zhengzhou, China, 2022. [Google Scholar]
- Qiu, Y.F. Design and Optimization of Ridging and Film Mulching Machine Applicable to Clay Environment. Master’s Thesis, Central South University, Changsha, China, 2022. [Google Scholar]
- YANMAR. BS142CHN. Available online: https://www.yanmar.com/jp/agri/products/implements/bs142ch/ (accessed on 12 January 2024).
- Zhang, Q.S.; Cai, J.S.; Yu, L.H.; Fang, Z.; Liao, Q.X.; Bian, Q.W.; Chen, Z.L. Design and Experiment of Ridging Leveling Device for Cold Waterlogged Paddy Field. Trans. Chin. Soc. Agric. Mach. 2024, 1–10. Available online: http://kns.cnki.net/kcms/detail/11.1964.S.20240104.1535.002.html (accessed on 26 January 2024).
- Tan, H.W. Design and Experiment of a Combined Seeding Furrow Opener. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2018. [Google Scholar]
- Zhang, H.; Guo, X.Y.; Zhang, J.; Yang, R.B.; Wang, W.J.; Qi, S.C. Design and Experiment of Two-stage Combined Ridging Device for Potato Planter. Trans. Chin. Soc. Agric. Mach. 2023, 54, 76–83+92. [Google Scholar]
- Wang, J.; Yao, Z.; Xu, Y.; Guo, F.; Guan, R.; Li, H.; Tang, H.; Wang, Q. Mechanism analysis and experimental verification of side-filled rice precision hole direct seed-metering device based on MBD-DEM simulations. Agriculture 2024, 14, 184. [Google Scholar] [CrossRef]
- Shi, L.; Zhao, W.; Hua, C.; Rao, G.; Guo, J.; Wang, Z. Study on the intercropping mechanism and seeding improvement of the cavity planter with vertical insertion using DEM-MBD coupling method. Agriculture 2022, 12, 1567. [Google Scholar] [CrossRef]
- Li, Y.; Hu, Z.; Gu, F.; Wang, B.; Fan, J.; Yang, H.; Wu, F. DEM-MBD coupling simulation and analysis of the working process of soil and tuber separation of a potato combine harvester. Agronomy 2022, 12, 1734. [Google Scholar] [CrossRef]
- Chen, X.; Chen, M.; Liu, M.; Yang, L.; Yang, D.; Wu, H. Design and experiment of sweet potato ridging and forming machine. Agriculture 2023, 13, 1641. [Google Scholar] [CrossRef]
- Han, J. Modeling Impacts of Rainfall Harvesting with Ridge and Furrow on Soil Temperature, Moisture, and Yield Using DNDC. Ph.D. Thesis, Northwest A&F University, Xianyang, China, 2013. [Google Scholar]
- Zhou, Y.J. Effects of Ratio of Furrow and Ridge with Mulching Patterns on Soil Organic Carbon, Nitrogen Contents and Potato Yield. Master’s Thesis, Ningxia University, Yinchuan, China, 2021. [Google Scholar]
- Du, W.B.; Yang, C.L.; Yang, J.P.; Zhang, Q.S.; Yu, J.; Liao, Q.X. Design and Experiment of Cigar Tobacco Adjustable Seed-plot Ridging and Film Spreading Machine. Trans. Chin. Soc. Agric. Mach. 2023, 54, 116–126+295. [Google Scholar]
- Yang, T.; Chen, X.B.; Xu, H.; Qin, Z.C.; Liu, S.J.; Liu, J.J. Influence of pepper roots on the spatial movement differentiation of soil moisture in farmland. Trans. Chin. Soc. Agric. Eng. 2023, 39, 141–150. [Google Scholar]
- Lin, J.; Zhang, T.J.; Chen, B.; Han, W.; Lv, Q.L.; Wang, J.Q. Design and Test of Subsoiling Rotary Rilling and Rilling Combined Operating Machine. Trans. Chin. Soc. Agric. Mach. 2019, 50, 28–39. [Google Scholar] [CrossRef]
- Strudley, M.W.; Green, T.R.; Ascough, J.C. Tillage effects on soil hydraulic properties in space and time: State of the science. Soil Tillage Res. 2008, 99, 4–48. [Google Scholar] [CrossRef]
- Lv, J.Q.; Liu, Q.H.; Yang, D.Q.; Li, J.C.; Liu, Z.Y.; Yu, J. Design and Test of Key Components of Ploughshare Potato Field Cultivator in Sandy Loam. Trans. Chin. Soc. Agric. Mach. 2021, 52, 27–39. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, Q.S.; Liao, Y.T.; Wei, G.L.; Du, Z.; Liao, Q.X. Design of Plow-rotary and Roll-forming Revetment Style Seed Bed Ridging Device of Combined Precision Seeder for Brassica chinensis. Trans. Chin. Soc. Agric. Mach. 2021, 52, 40–48+77. [Google Scholar] [CrossRef]
- GB/T 5669-2017; Rotary Tillage Machinery Blades and Holders. China National GB Standard Research: Nanjing, China, 2017.
- Makarov, S.A.; Danilin, A.V.; Levchenko, G.V.; Kalinichenko, E.B.; Ivaniva, L.M. Investigation of kinematic parameters of the rotary working body of a universal rotary cultivator. IOP Conf. Series. Earth Environ. Sci. 2022, 979, 012058. [Google Scholar] [CrossRef]
- He, X.; Lv, Y.; Qu, Z.; Wang, W.; Zhou, Z.; He, H. Parameters optimization and test of caterpillar self-propelled tiger nut harvester hoisting device. Agriculture 2022, 12, 1060. [Google Scholar] [CrossRef]
- Xiao, M.H.; Niu, Y.; Wang, K.X.; Zhu, Y.J.; Zhou, J.B.; Ma, R.Q. Design of Self-excited Vibrating Rotary Tiller and Analysis of Its Performance in Reducing Torsion and Consumption. Trans. Chin. Soc. Agric. Mach. 2022, 53, 52–63. [Google Scholar] [CrossRef]
- T/CAMA 37-2020; Technical Specification for Mechanized Vegetable Ridge Rising Operations. Chinese Agricultural Machinery and Equipment Comprehensive Group Standard Research: Nanjing, China, 2020.
- DB23/T2351-2019; Specification for Evaluation of Ridge Riser Operation Quality. Chinese Regional Standard Research: Heilongjiang, China, 2019.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types | Principle of Operation | Advantages | Disadvantages |
|---|---|---|---|
| Disc plough ridge machinery | This model relies on tractor traction and soil resistance to complete ridging. By adjusting the disc size, inclination angle, and working width, it can complete the crushing and turning of soil [7]. | This machine has a simple structure, is lightweight for transportation, and has low manufacturing costs. | The adjustment steps for the disc plough are cumbersome and difficult, and it is not suitable for clayey soil plots, which poses significant operational limitations. |
| Plowshare-type ridge machinery | This model relies on tractor traction to make the plowshare type cut the soil and complete the ridging. The curved shape of the plowshare helps lift the soil as it cuts and creates a raised mounding shape. | This machine has a high productivity, convenient power supply, simple structure, reliable operation, and low operating costs [8]. | This machine requires a higher traction resistance. Additionally, when excavating channels, it is necessary to use leveling tools or manually level the soil on both sides of the ditch to ensure the smoothness of the ridges. |
| Rotary tillage ridge machinery | This model uses high-speed rotary tillage knives to cooperate with the ridging mechanism for ridging, and then various types of ridging parts are extruded to form a ridge [9]. | This machine has a high productivity, convenient power supply, reliable operation, low traction resistance, and high soil fragmentation rate, and it produces uniformly stable ridges. | This machine features a complex design and structure. Additional design and adjustments are necessary to accommodate the varying growth conditions of different crops, resulting in higher investment and operational costs. |
| Parameter Type | Density (kg·m−3) | Poisson’s Ratio | Shear Modulus (Pa) |
|---|---|---|---|
| Top soil | 1535 | 0.40 | 6.0 × 107 |
| Sub soil | 1755 | 0.42 | 6.0 × 107 |
| 65 Mn | 7860 | 0.29 | 7.9 × 1010 |
| Contact Parameters | Collision Recovery Coefficient | Static Friction Coefficient | Dynamic Friction Coefficient |
|---|---|---|---|
| Top soil-Top soil | 0.13 | 0.32 | 0.14 |
| Top soil-Sub soil | 0.145 | 0.33 | 0.155 |
| Sub soil-Sub soil | 0.16 | 0.34 | 0.17 |
| Top soil-65 Mn | 0.6 | 0.31 | 0.11 |
| Sub soil-65 Mn | 0.6 | 0.64 | 0.13 |
| Parameter Name | Numerical Value |
|---|---|
| Bonding radius/(mm) | 7 |
| Normal critical stress/KPa | 235 |
| Shear critical stress/KPa | 186 |
| Normal stiffness coefficient/(N·m−2) | 2.4 × 106 |
| Shear stiffness coefficient/(N·m−2) | 1.8 × 106 |
| Top soil-Top soil surface energy/(J·m−2) | 5.6 |
| Top soil-Sub soil surface energy/(J·m−2) | 6.4 |
| Sub soil-Sub soil surface energy/(J·m−2) | 7.2 |
| Levels | Factors | ||
|---|---|---|---|
| Depth of Rotary Tillage X1 (mm) | Rotation Speed of Stemming Rollers X2 (r/min) | Forward Speed of Machine X3 (m/s) | |
| −1 | 152 | 108 | 0.55 |
| 0 | 179 | 205 | 0.69 |
| 1 | 206 | 302 | 0.83 |
| No. | Factors | Response Values | |||
|---|---|---|---|---|---|
| X1 | X2 | X3 | Y1/N | Y2/Kpa | |
| 1 | 0 | −1 | −1 | 707.70 | 59.40 |
| 2 | 0 | 0 | 0 | 644.13 | 53.67 |
| 3 | 0 | 1 | −1 | 643.27 | 63.70 |
| 4 | −1 | 1 | 0 | 663.37 | 56.54 |
| 5 | 0 | 0 | 0 | 647.10 | 52.24 |
| 6 | 1 | 1 | 0 | 670.43 | 62.56 |
| 7 | −1 | 0 | −1 | 622.10 | 53.38 |
| 8 | 1 | −1 | 0 | 724.30 | 55.10 |
| 9 | 0 | 0 | 0 | 654.47 | 55.10 |
| 10 | 0 | 1 | 1 | 746.42 | 51.95 |
| 11 | −1 | 0 | 1 | 722.71 | 35.61 |
| 12 | −1 | −1 | 0 | 699.49 | 45.36 |
| 13 | 0 | 0 | 0 | 640.61 | 54.24 |
| 14 | 0 | −1 | 1 | 738.89 | 48.80 |
| 15 | 1 | 0 | 1 | 756.20 | 54.24 |
| 16 | 0 | 0 | 0 | 635.47 | 52.81 |
| 17 | 1 | 0 | −1 | 649.47 | 57.11 |
| Source | Freedom | Sum of Squares | Mean Square | F-Value | p-Value | Significance |
|---|---|---|---|---|---|---|
| Mode | 9 | 30,063.82 | 3340.42 | 21.05 | 0.0003 | ** |
| X1 | 1 | 1074.86 | 1074.86 | 6.77 | 0.0353 | * |
| X2 | 1 | 2697.08 | 2697.08 | 16.99 | 0.0044 | ** |
| X3 | 1 | 14,593.15 | 14,593.15 | 91.95 | <0.0001 | ** |
| X1X2 | 1 | 78.77 | 78.77 | 0.4963 | 0.5039 | |
| X1X3 | 1 | 9.36 | 9.36 | 0.0590 | 0.8150 | |
| X2X3 | 1 | 1294.56 | 1294.56 | 8.16 | 0.0245 | * |
| X12 | 1 | 585.85 | 585.85 | 3.69 | 0.0961 | |
| X22 | 1 | 4653.81 | 4653.81 | 29.32 | 0.0010 | ** |
| X32 | 1 | 4169.48 | 4169.48 | 26.27 | 0.0014 | ** |
| Residual error | 7 | 1110.91 | 158.70 | |||
| Lack-of-fit | 3 | 908.05 | 302.68 | 5.97 | 0.0586 | |
| Pure Error | 4 | 202.87 | 50.72 | |||
| Cor Total | 16 | 31,174.73 |
| Source | Freedom | Sum of Squares | Mean Square | F-Value | p-Value | Significance |
|---|---|---|---|---|---|---|
| Mode | 9 | 635.42 | 70.60 | 18.58 | 0.0004 | ** |
| X1 | 1 | 181.64 | 181.64 | 47.80 | 0.0002 | ** |
| X2 | 1 | 85.09 | 85.09 | 22.39 | 0.0021 | ** |
| X3 | 1 | 231.02 | 231.02 | 60.79 | 0.0001 | ** |
| X1X2 | 1 | 3.46 | 3.46 | 0.9104 | 0.3718 | |
| X1X3 | 1 | 55.50 | 55.50 | 14.61 | 0.0065 | ** |
| X2X3 | 1 | 0.3306 | 0.3306 | 0.0870 | 0.7766 | |
| X12 | 1 | 22.27 | 22.27 | 5.86 | 0.0460 | * |
| X22 | 1 | 53.90 | 53.90 | 14.18 | 0.0070 | ** |
| X32 | 1 | 6.34 | 6.34 | 1.67 | 0.2374 | |
| Residual error | 7 | 26.60 | 3.80 | |||
| Lack-of-fit | 3 | 21.46 | 7.15 | 5.57 | 0.0653 | |
| Pure Error | 4 | 5.14 | 1.28 | |||
| Cor Total | 16 | 662.02 |
| Parameter | Data | |
|---|---|---|
| Ridge height | Mean value/mm | 222.9 |
| Stability coefficient% | 93.36 | |
| Ridge spacing | Mean value/mm | 1173.1 |
| Stability coefficient% | 91.73 | |
| Ridge top width | Mean value/mm | 549.2 |
| Stability coefficient% | 97.34 | |
| Ridge bottom width | Mean value/mm | 750.5 |
| Stability coefficient% | 95.29 | |
| Soil compactness | Mean value /KPa | 66.82 |
| Stability coefficient% | 90.76 | |
| Width of soil covering the film edge | Mean value/mm | 76.3 |
| Stability coefficient% | 96.10 | |
| Surface smoothness of the ridges | Mean value/mm | 12.31 |
| Stability coefficient% | 93.29 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Zhang, K.; Zhang, Y.; An, J. Discrete Element Method–Multibody Dynamics Coupling Simulation and Experiment of Rotary Tillage and Ridging Process for Chili Pepper Cultivation. Agronomy 2024, 14, 446. https://doi.org/10.3390/agronomy14030446
Yang Z, Zhang K, Zhang Y, An J. Discrete Element Method–Multibody Dynamics Coupling Simulation and Experiment of Rotary Tillage and Ridging Process for Chili Pepper Cultivation. Agronomy. 2024; 14(3):446. https://doi.org/10.3390/agronomy14030446
Chicago/Turabian StyleYang, Zhikai, Keping Zhang, Yang Zhang, and Jing An. 2024. "Discrete Element Method–Multibody Dynamics Coupling Simulation and Experiment of Rotary Tillage and Ridging Process for Chili Pepper Cultivation" Agronomy 14, no. 3: 446. https://doi.org/10.3390/agronomy14030446