
Assisted Tea Leaf Picking: The Design and Simulation of a 6-DOF Stewart Parallel Lifting Platform


Abstract
:1. Introduction
2. Materials and Methods
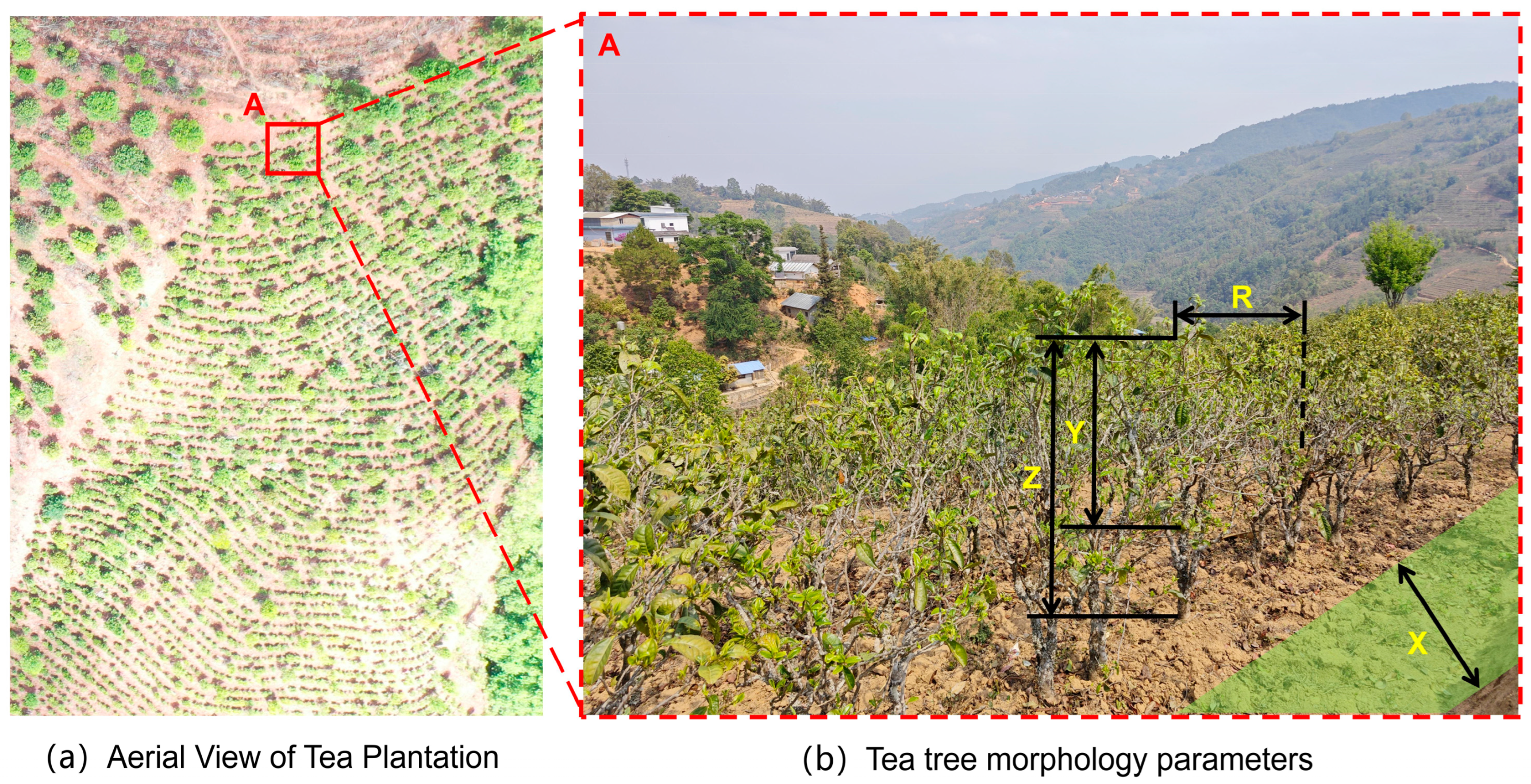
2.1. Analysis of Tea Planting Environment and Picking Process
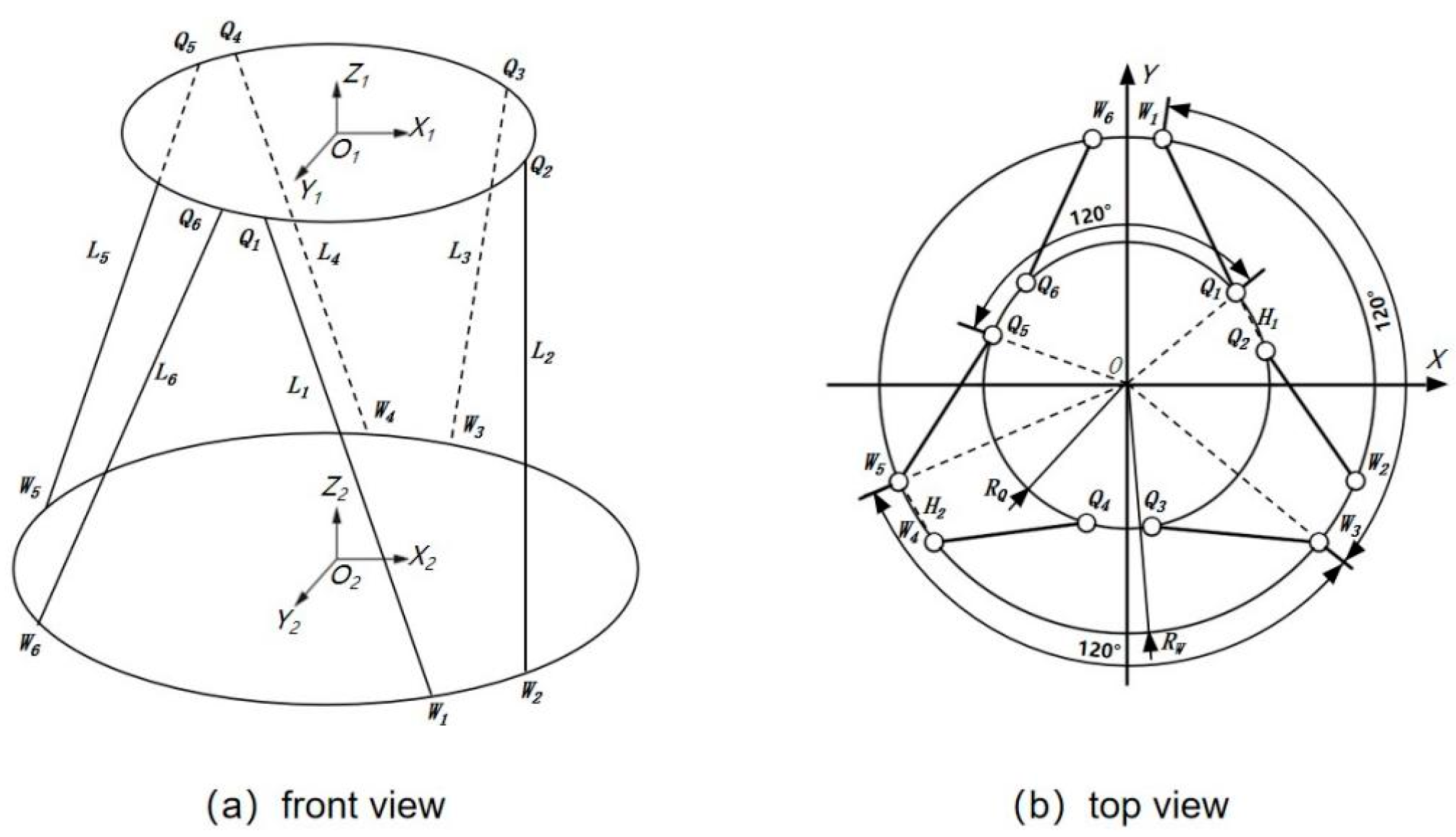
2.2. Modeling and Analysis of Stewart Parallel Lifting Platform
2.3. Extreme Position Motion Interference Analysis
2.4. Kinematic Solutions
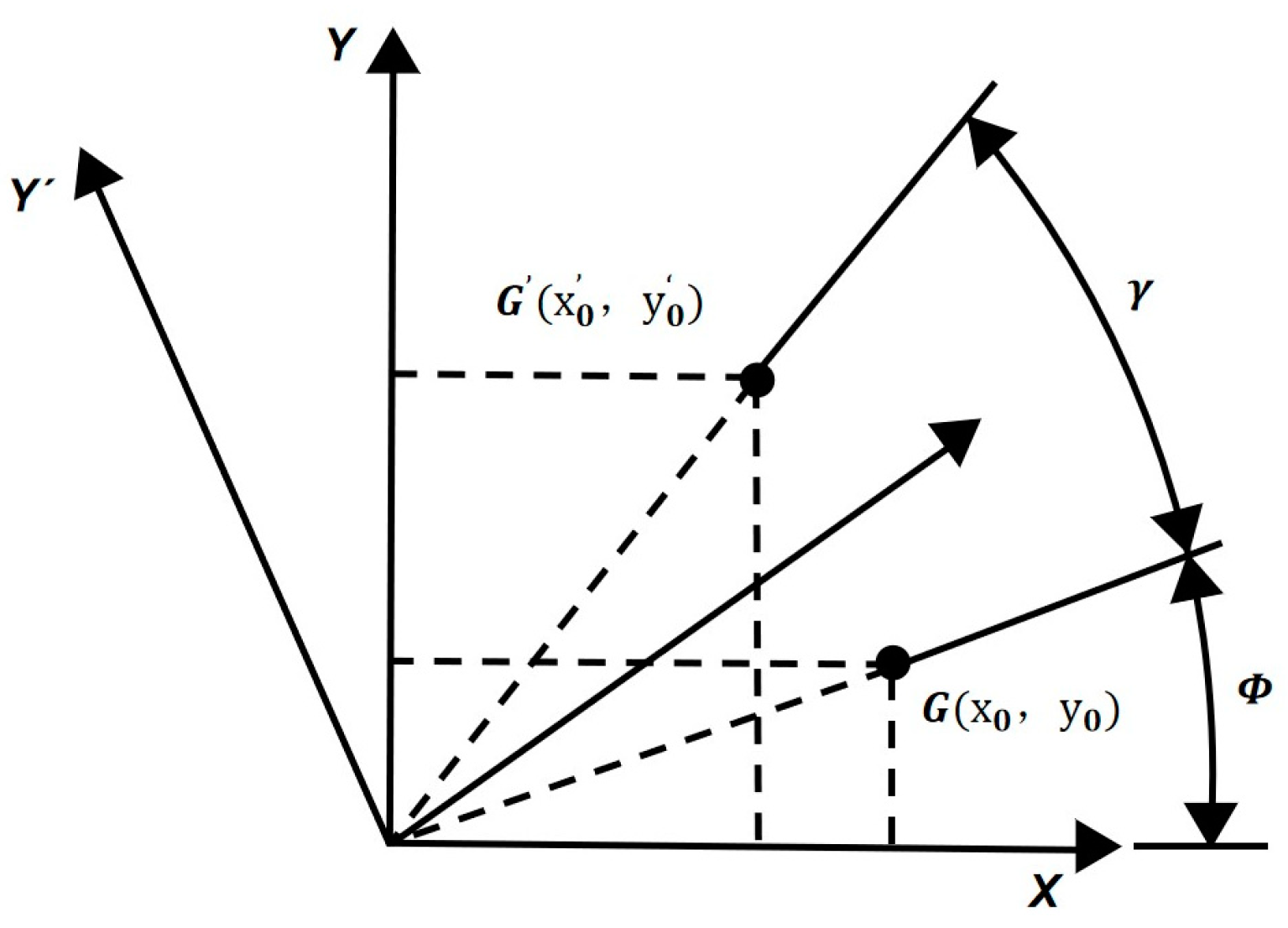
2.4.1. Analysis of Spatial Attitude Coordinate Transformation
2.4.2. Position Analysis
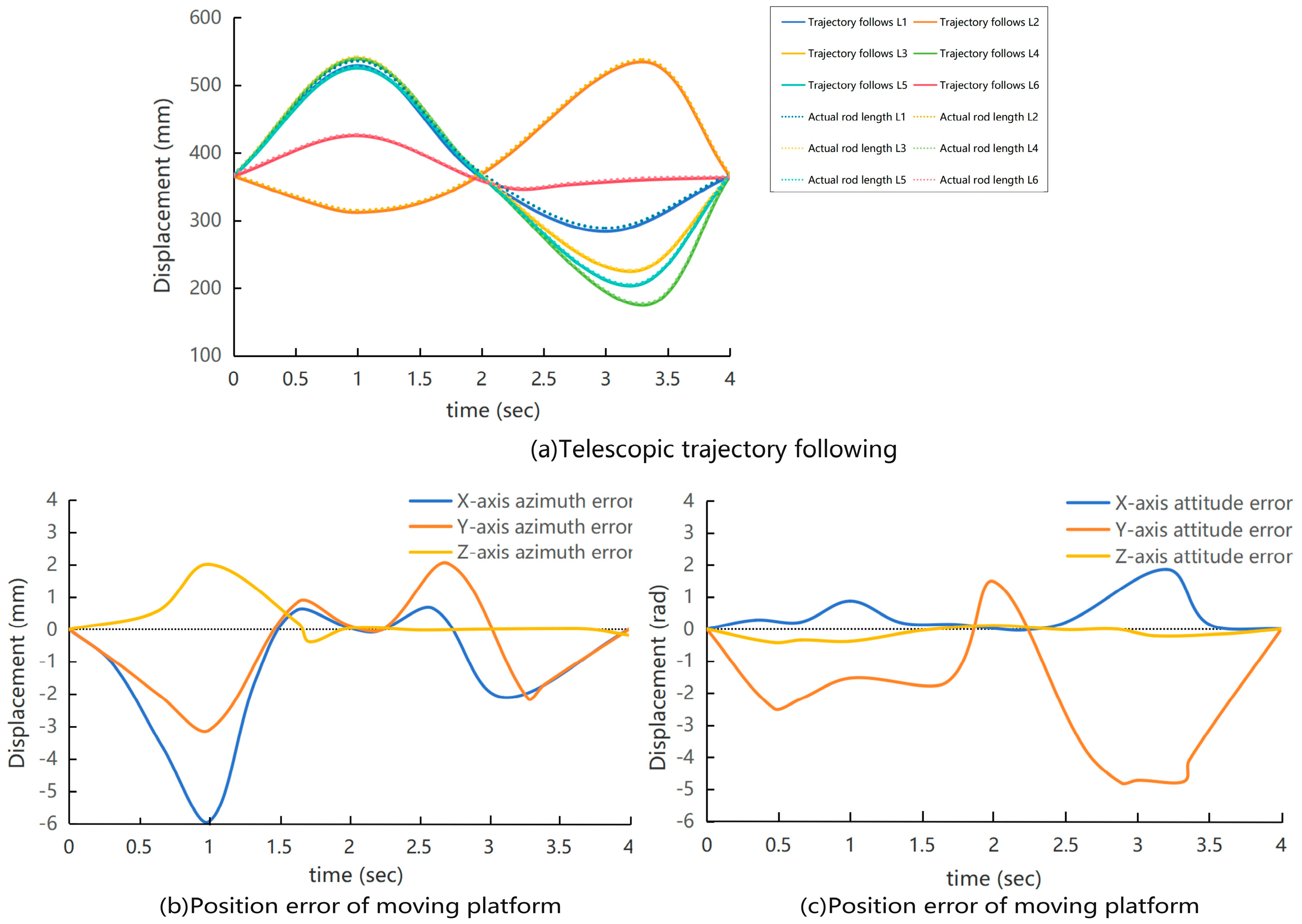
2.5. Kinematics Simulation
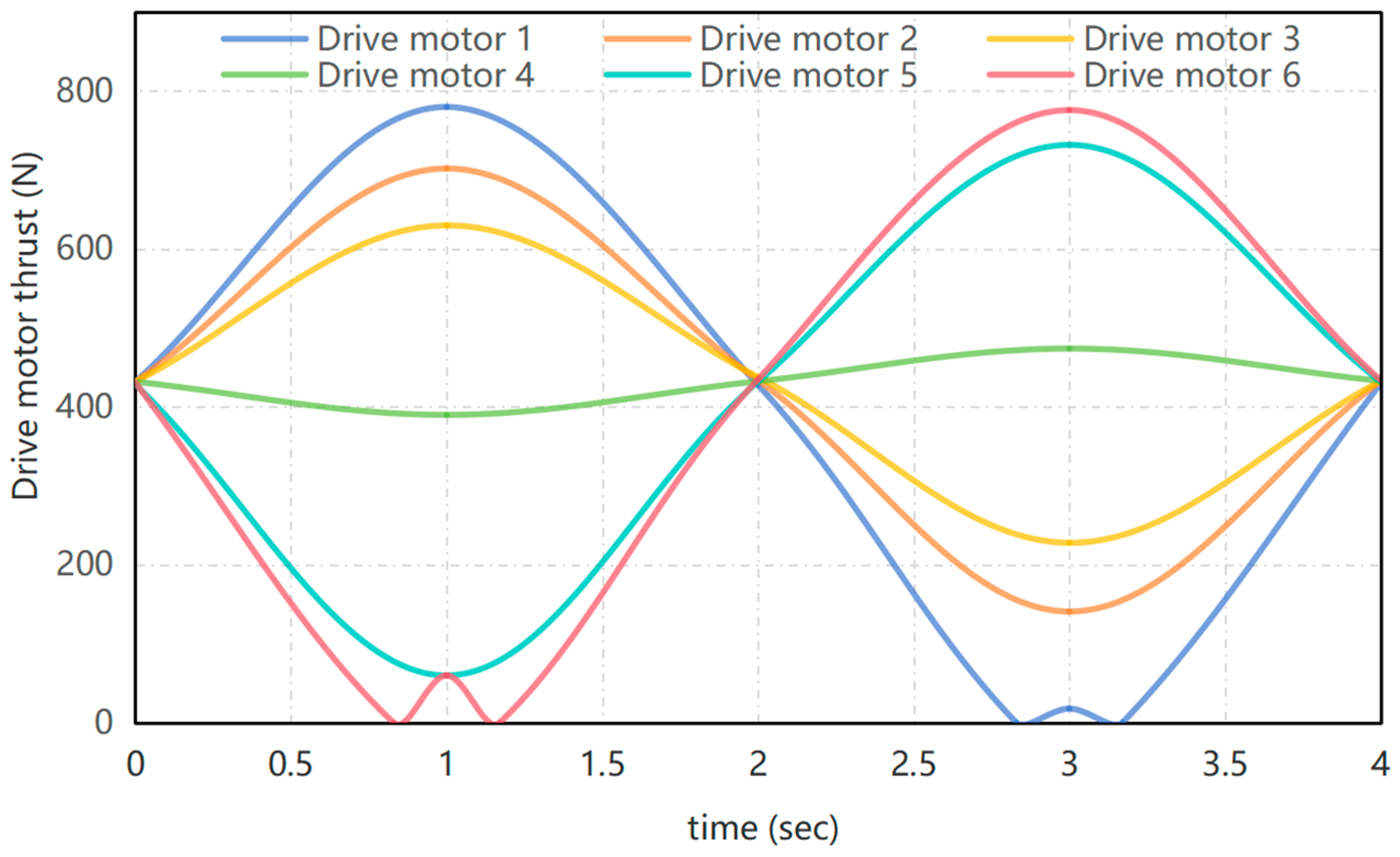
2.6. Dynamic Simulation
3. Results
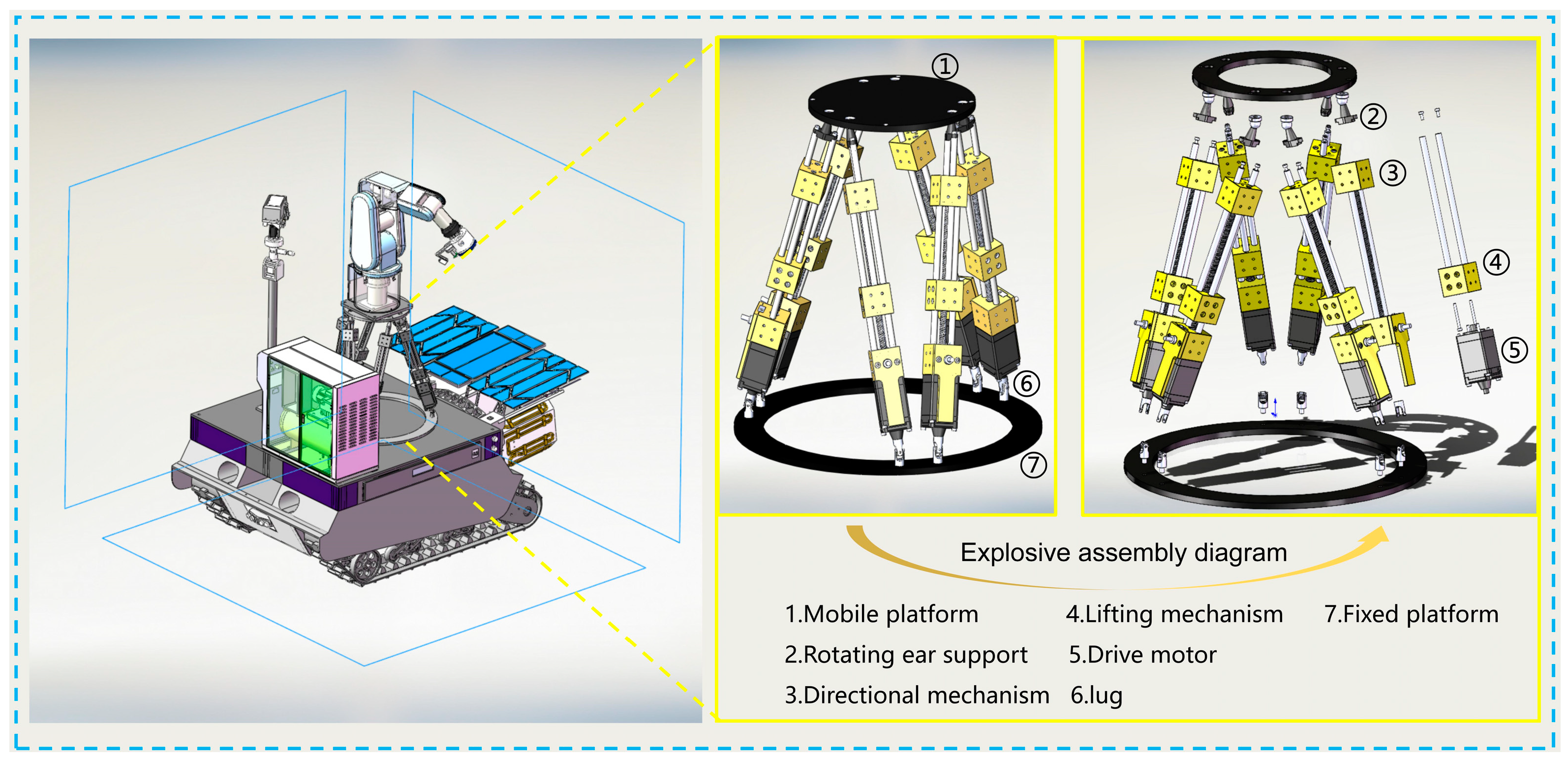
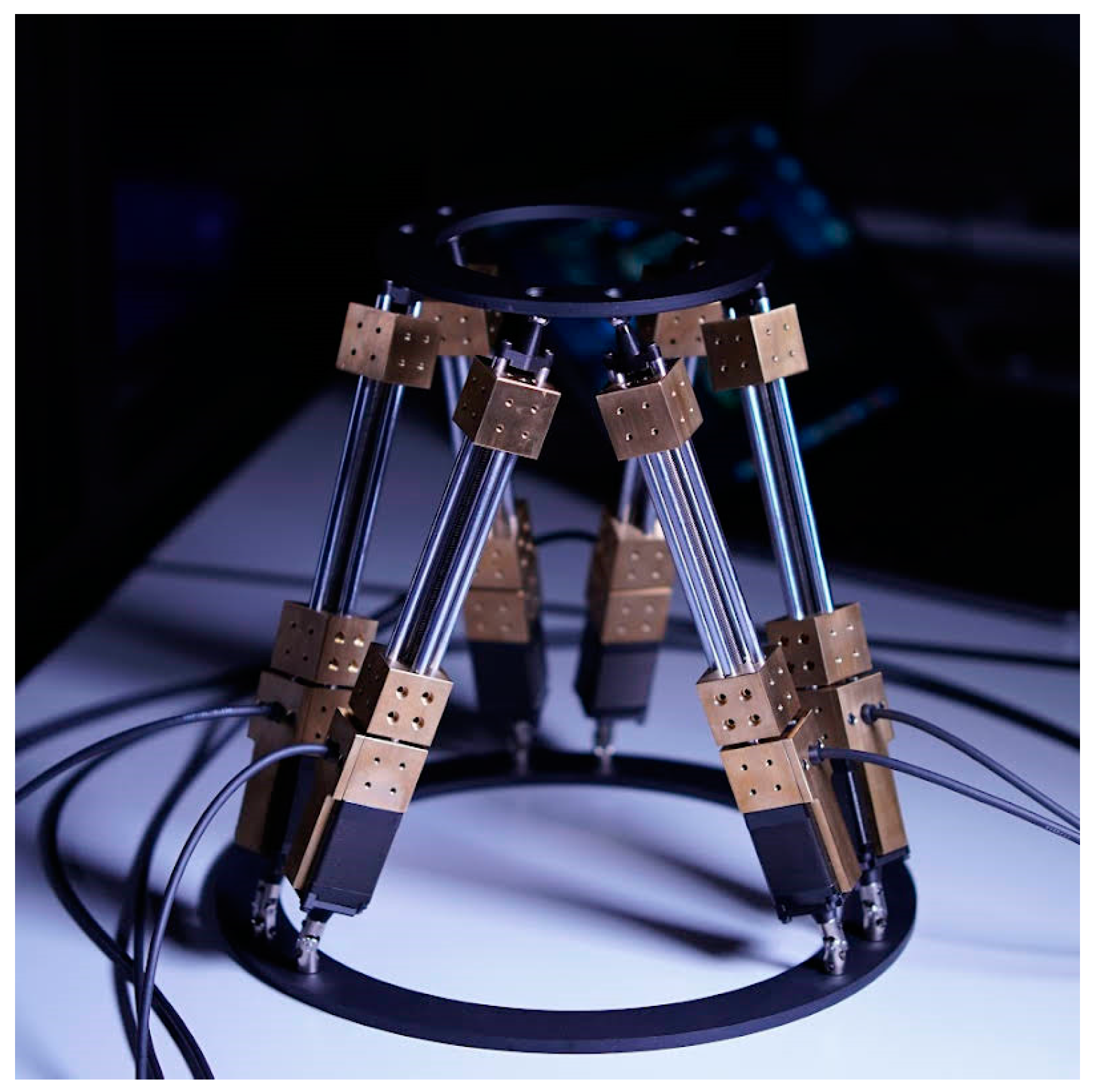
3.1. Mechanical Mechanism
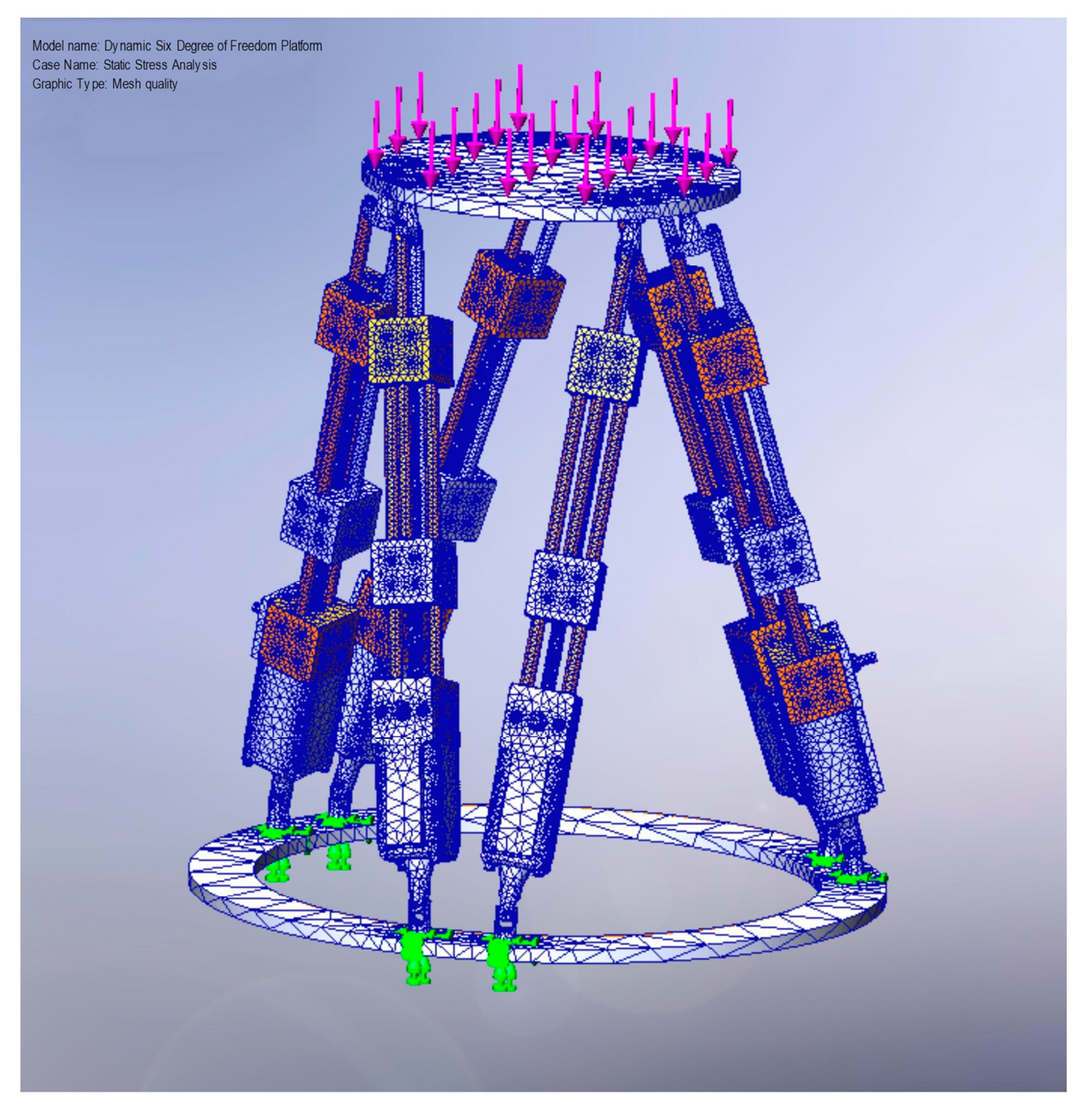
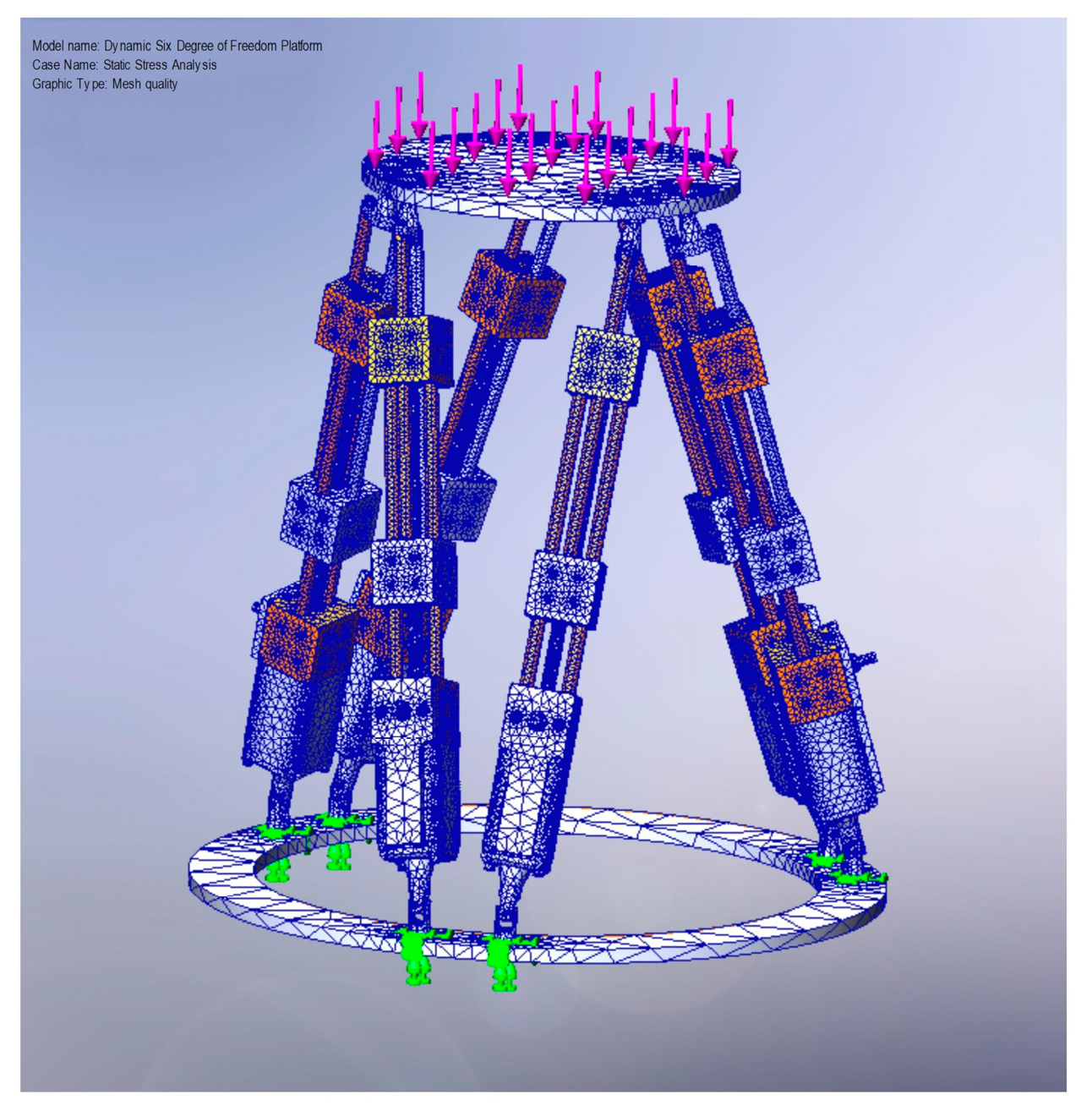
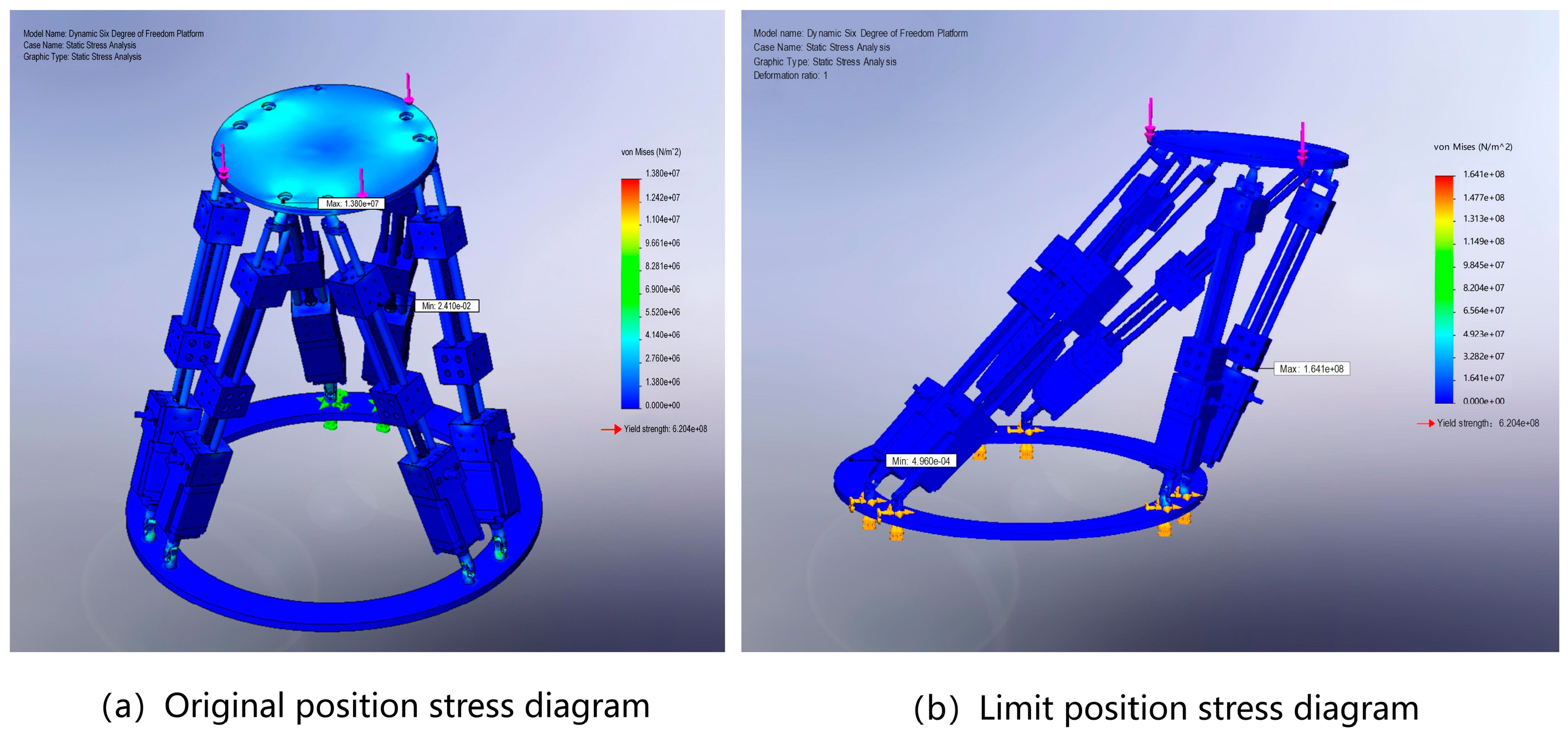
3.2. Finite Element Simulation of the Whole Machine after Loading
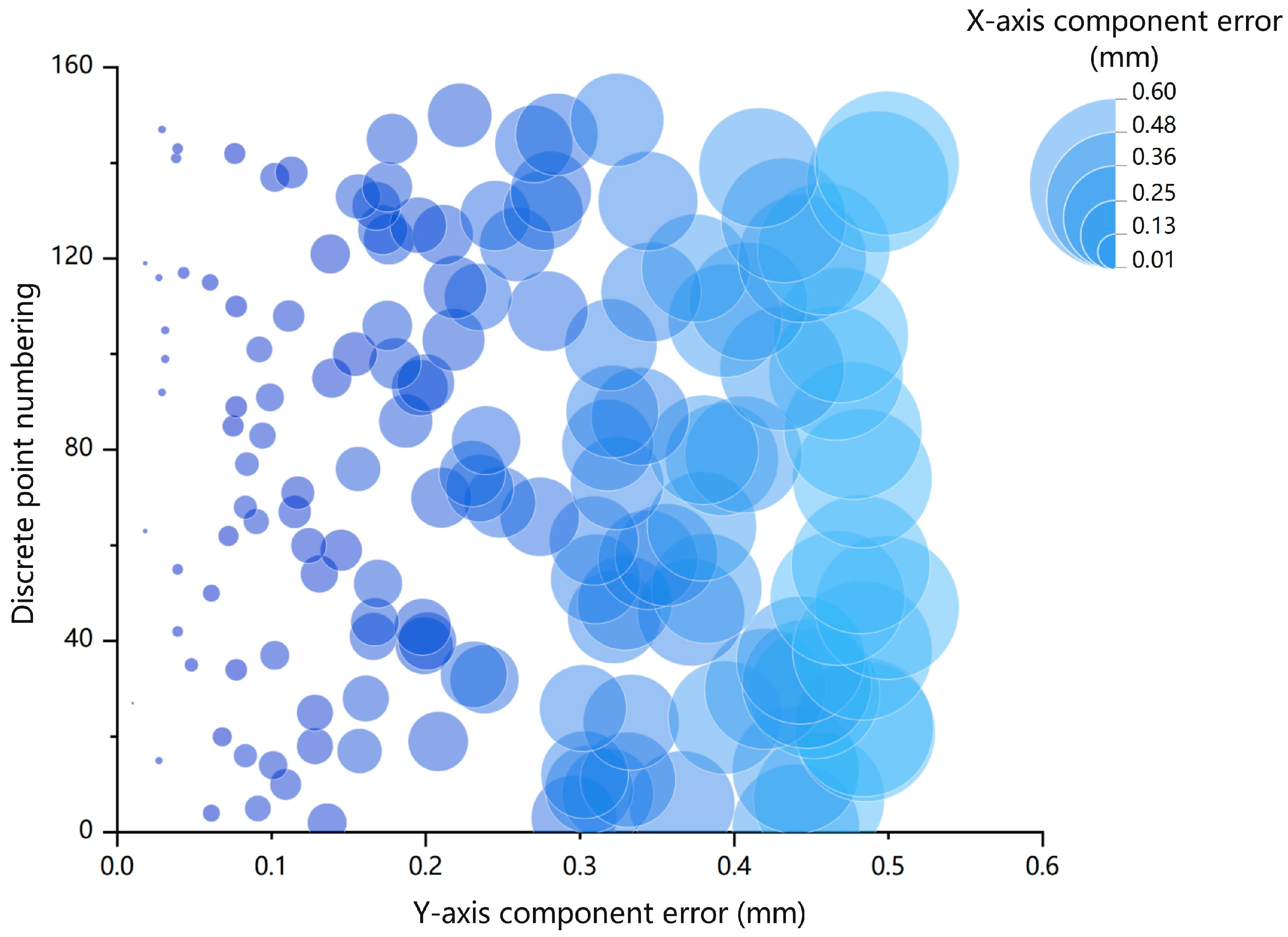
3.3. Experimental Verification
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Abbreviation | Description |
|---|---|---|
| SolidWorks 2023 | SW | SolidWorks is an advanced 3D CAD (Computer-Aided Design) software developed by Dassault Systèmes, widely used in the field of engineering design. |
| Collision Visualization System | CVS | It is a system used to visualize collision events. It can help users visually observe and analyze the collision situations between different objects in order to carry out data analysis and decision making more effectively. |
| Proportional-Derivative | PD | A PD controller combines proportional (P) and derivative (D) control actions. It is a simplified form of a PID controller commonly used in industrial feedback control systems, which calculates the required control signal based on the current state of the control system, error, and rate of change of error. |
| MATLAB-Simulink | X | MATLAB software is a tool developed by MathWorks for mathematical modeling, simulation, and control system design, while Simulink is a module in the MATLAB software. |
| SimMechanics | X | Users can easily build complex multi-body dynamics models, including mechanical systems, coupled mechanical and electrical systems, and more. |
| Automatic Dynamic Analysis of Mechanical Systems | ADAMS | This software is a simulation software developed by the American company MSC (Ann Arbor, Michigan, United States) Software for conducting dynamic analysis of mechanical systems, capable of quickly and efficiently simulating and analyzing various complex mechanical systems. |
| SolidWorks-Simulation | SW-Simulation | Simulation is a module in SolidWorks 2023 software that allows for finite element analysis such as structural, fluid, and thermal analysis. It can validate the performance and durability of products and optimize designs to meet engineering requirements. |
References
- Wen, X.; Zhang, Z.; Huang, X. Heavy metals in karst tea garden soils under different ecological environments in southwestern China. Trop. Ecol. 2022, 63, 495–505. [Google Scholar] [CrossRef]
- Li, W.; Zhang, Q.; Fan, Y.; Cheng, Z.; Lu, X.; Luo, B.; Long, C. Traditional management of ancient Pu’er teagardens in Jingmai Mountains in Yunnan of China, a designated Globally Important Agricultural Heritage Systems site. J. Ethnobiol. Ethnomed. 2023, 19, 26. [Google Scholar] [CrossRef] [PubMed]
- Durighello, R.; Luengo, M.; Ono, W.; Han, F.; Zou, Y.; Chen, Y.; Wang, C.; Shimizu, S.; Uesugi, K.; Yamaguchi, K.; et al. Tea Landscapes of Asia: A Thematic Study; ICOMOS: Paris France, 2021. [Google Scholar]
- Yang, H.; Chen, L.; Ma, Z.; Chen, M.; Zhong, Y.; Deng, F.; Li, M. Computer vision-based high-quality tea automatic plucking robot using Delta parallel manipulator. Comput. Electron. Agric. 2021, 181, 105946. [Google Scholar] [CrossRef]
- Soper, R. How wage structure and crop size negatively impact farmworker livelihoods in monocrop organic production: Interviews with strawberry harvesters in California. Agric. Hum. Values 2020, 37, 325–336. [Google Scholar] [CrossRef]
- Hou, R.; Wen, C. Sustainable Tea Garden Ecotourism Based on the Multifunctionality of Organic Agriculture Based on Artificial Intelligence Technology. Mob. Inf. Syst. 2021, 2021, 8696490. [Google Scholar] [CrossRef]
- Chen, C.; Lu, J.; Zhou, M.; Yi, J.; Liao, M.; Gao, Z. A YOLOv3-based computer vision system for identification of tea buds and the picking point. Comput. Electron. Agric. 2022, 198, 107116. [Google Scholar] [CrossRef]
- Li, Y.; He, L.; Jia, J.; Lv, J.; Chen, J.; Qiao, X.; Wu, C. In-field tea shoot detection and 3D localization using an RGB-D camera. Comput. Electron. Agric. 2021, 185, 106149. [Google Scholar] [CrossRef]
- Qi, C.; Gao, J.; Pearson, S.; Harman, H.; Chen, K.; Shu, L. Tea chrysanthemum detection under unstructured environments using the TC-YOLO model. Expert Syst. Appl. 2022, 193, 116473. [Google Scholar] [CrossRef]
- Zhang, L.; Zou, L.; Wu, C.; Jia, J.; Chen, J. Method of famous tea sprout identification and segmentation based on improved watershed algorithm. Comput. Electron. Agric. 2021, 184, 106108. [Google Scholar] [CrossRef]
- Zhang, L.; Zou, L.; Wu, C.; Chen, J.; Chen, H. Locating Famous Tea’s Picking Point Based on Shi-Tomasi Algorithm. Comput. Mater. Contin. 2021, 69, 16495. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, J.; Guo, B.; Wei, Q.; Zhu, Z. An apple detection method based on des-YOLO v4 algorithm for harvesting robots in complex environment. Math. Probl. Eng. 2021, 2021, 7351470. [Google Scholar] [CrossRef]
- Mishra, S.; Kumar, C. Compliance modeling of a full 6-DOF series–parallel flexure-based Stewart platform-like micromanipulator. Robotica 2022, 40, 3435–3462. [Google Scholar] [CrossRef]
- Luo, N.; Li, Y.; Yang, B.; Liu, B.; Dai, Q. Prediction Model for Tea Polyphenol Content with Deep Features Extracted Using 1D and 2D Convolutional Neural Network. Agriculture 2022, 12, 1299. [Google Scholar] [CrossRef]
- Hu, G.; Chen, C.; Chen, J.; Sun, L.; Sugirbay, A.; Chen, Y.; Jin, H.; Zhang, S.; Bu, L. Simplified 4-DOF manipulator for rapid robotic apple harvesting. Comput. Electron. Agric. 2022, 199, 107177. [Google Scholar] [CrossRef]
- Xiang, Q.; Cheng, L.; Zhang, R.; Liu, Y.; Wu, Z.; Zhang, X. Tea Polyphenols Prevent and Intervene in COVID-19 through Intestinal Microbiota. Foods 2022, 11, 506. [Google Scholar] [CrossRef]
- Nurahmi, L.; Putrayudanto, P.; Wei, G.; Agrawal, S.K. Geometric constraint-based reconfiguration and self-motions of a four-CRU parallel mechanism. J. Mech. Robot. 2021, 13, 021017. [Google Scholar] [CrossRef]
- Yang, H.; Chen, L.; Chen, M.; Ma, Z.; Deng, F.; Li, M.; Li, X. Tender tea shoots recognition and positioning for picking robot using improved YOLO-V3 model. IEEE Access 2019, 7, 180998–181011. [Google Scholar] [CrossRef]
- Kondo, N.; Nishitsuji, Y.; Ling, P.P.; Ting, K.C. Visual feedback guided robotic cherry tomato harvesting. Trans. ASAE 1996, 39, 2331–2338. [Google Scholar] [CrossRef]
- Kang, H.; Chen, C. Fruit detection and segmentation for apple harvesting using visual sensor in orchards. Sensors 2019, 19, 4599. [Google Scholar] [CrossRef]
- Xiong, Y.; Peng, C.; Grimstad, L.; From, P.J.; Isler, V. Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper. Comput. Electron. Agric. 2019, 157, 392–402. [Google Scholar] [CrossRef]
- Gong, L.; Wang, W.; Wang, T.; Liu, C. Robotic harvesting of the occluded fruits with a precise shape and position reconstruction approach. J. Field Robot. 2022, 39, 69–84. [Google Scholar] [CrossRef]
- Cao, P.; Wang, T.; Zhai, L.; Niu, S.; Liu, L.; Shi, Y. Design of 6-DOF Tomato Picking Lifting Platform. Agriculture 2022, 12, 1945. [Google Scholar] [CrossRef]
- Yang, J.; Jin, L.; Han, Z.; Zhao, D.; Hu, M. Sensitivity analysis of factors affecting motion reliability of manipulator and fault diagnosis based on kernel principal component analysis. Robotica 2022, 40, 2547–2566. [Google Scholar] [CrossRef]
- Wu, L.; Li, X.; Zhong, K.; Li, Z.; Wang, C.; Shi, Y. HCCG: Efficient high compatibility correspondence grouping for 3D object recognition and 6D pose estimation in cluttered scenes. Measurement 2022, 197, 111296. [Google Scholar] [CrossRef]
- Lian, B.; Wang, L.; Wang, X. Elastodynamic modeling and parameter sensitivity analysis of a parallel manipulator with articulated traveling plate. Int. J. Adv. Manuf. Technol. 2019, 102, 1583–1599. [Google Scholar] [CrossRef]
- Wang, X.; Han, C.; Wu, W.; Xu, J.; Zhang, Q.; Chen, M.; Hu, Z.; Zheng, Z. Fundamental understanding of tea growth and modeling of precise tea shoot picking based on 3-D coordinate instrument. Processes 2021, 9, 1059. [Google Scholar] [CrossRef]
- Liu, D.; Arai, S.; Miao, J.; Kinugawa, J.; Wang, Z.; Kosuge, K. Point pair feature-based pose estimation with multiple edge appearance models (PPF-MEAM) for robotic bin picking. Sensors 2018, 18, 2719. [Google Scholar] [CrossRef] [PubMed]
- Kuruvilla, J.K.; Seth, A.; Duttagupta, J.; Sharma, S.; Jaiswal, A. Structural Design and Analysis of 6-DOF Cylindrical Robotic Manipulators for Automated Agriculture. In Precision Agriculture for Sustainability; Springer: Berlin/Heidelberg, Germany, 2024; pp. 147–168. [Google Scholar]
- Concepcion, R., II; Lauguico, S.; Valenzuela, I.; Bandala, A.; Dadios, E. Denavit-Hartenberg-based Analytic Kinematics and Modeling of 6R Degrees of Freedom Robotic Arm for Smart Farming. J. Comput. Innov. Eng. Appl. 2021, 5, 1–7. [Google Scholar]
- Iqbal, J.; Islam, R.U.; Khan, H. Modeling and analysis of a 6 DOF robotic arm manipulator. Can. J. Electr. Electron. Eng. 2012, 3, 300–306. [Google Scholar]
- Sundermeyer, M.; Mousavian, A.; Triebel, R.; Fox, D. Contact-graspnet: Efficient 6-dof grasp generation in cluttered scenes. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 5 June 2021; pp. 13438–13444. [Google Scholar]
- Taghizadeh, M.; Yarmohammadi, M. Development of a self-tuning PID controller on hydraulically actuated stewart platform stabilizer with base excitation. Int. J. Control. Autom. Syst. 2018, 16, 2990–2999. [Google Scholar] [CrossRef]
- Wang, C.; Wang, C.; Wang, L.; Wang, J.; Liao, J.; Li, Y.; Lan, Y. A Lightweight Cherry Tomato Maturity Real-Time Detection Algorithm Based on Improved YOLOV5n. Agronomy 2023, 13, 2106. [Google Scholar] [CrossRef]
- Tripodo, C.; Lorenzi, S.; Cammi, A.; Miccichè, G. Object-oriented modeling, simulation and control of a 6-DoF parallel kinematic manipulator for remote handling in DONES facility. Fusion Eng. Des. 2022, 184, 113304. [Google Scholar] [CrossRef]
- Jang, T.; Lim, B.; Kim, M. The canonical stewart platform as a six DOF pose sensor for automotive applications. J. Mech. Sci. Technol. 2018, 32, 5553–5561. [Google Scholar] [CrossRef]
- Xu, W.; Zhao, L.; Li, J.; Shang, S.; Ding, X.; Wang, T. Detection and classification of tea buds based on deep learning. Comput. Electron. Agric. 2022, 192, 106547. [Google Scholar] [CrossRef]
- Tanaka, Y. Active vibration compensator on moving vessel by hydraulic parallel mechanism. Int. J. Hydromechatron. 2018, 1, 350–359. [Google Scholar] [CrossRef]
- Zhang, L.; Zong, X.; Tang, Y.; Chen, X.; Feng, J.; Yuan, X. Modal and natural frequency sensitivity analysis of electrohydraulic stewart platform. Shock Vib. 2021, 2021, 5587282. [Google Scholar] [CrossRef]
- Xie, Z.; Li, G.; Liu, G.; Zhao, J. Optimal design of a Stewart platform using the global transmission index under determinate constraint of workspace. Adv. Mech. Eng. 2017, 9, 1687814017720880. [Google Scholar] [CrossRef]
- Kenfack Essougong, U.P.; Slingerland, M.; Mathé, S.; Giller, K.E.; Leeuwis, C. Farmers’ access, demand, and satisfaction with innovation support services and their determinants: The case of the cocoa sector in Central Cameroon. J. Agric. Educ. Ext. 2023, 1–31. [Google Scholar] [CrossRef]
- Lee, C.L.; Strong, R.; Briers, G.; Murphrey, T.; Rajan, N.; Rampold, S. A correlational study of two US state Extension professionals’ behavioral intentions to improve sustainable food chains through precision farming practices. Foods 2023, 12, 2208. [Google Scholar] [CrossRef]
- Seth, A.; Kuruvilla, J.K.; Sharma, S.; Duttagupta, J.; Jaiswal, A. Design and simulation of 6-DOF cylindrical robotic manipulator using finite element analysis. Mater. Today Proc. 2022, 62, 1521–1525. [Google Scholar] [CrossRef]
- Ariffin, M.A.K.; Kiong, S.C. Design and Development Small Scale Packaging Machine for Tea Bags. J. Des. Sustain. Environ. 2024, 6, 40–43. [Google Scholar]
- Wu, Y.; Yu, K.; Jiao, J.; Cao, D.; Chi, W.; Tang, J. Dynamic isotropy design and analysis of a six-DOF active micro-vibration isolation manipulator on satellites. Robot. Comput.-Integr. Manuf. 2018, 49, 408–425. [Google Scholar] [CrossRef]
- Wu, Y.; Yu, K.; Jiao, J.; Zhao, R. Dynamic modeling and robust nonlinear control of a six-DOF active micro-vibration isolation manipulator with parameter uncertainties. Mech. Mach. Theory 2015, 92, 407–435. [Google Scholar] [CrossRef]
- Patra, S.; Sarkhel, P.; Hui, N.B.; Banerjee, N. Modelling and Simulation of a Fishing Rod (Flexible Link) Using Simmechanics. J. Eur. Systèmes Autom. 2020, 53, 451–460. [Google Scholar] [CrossRef]
- Li, Y.; Ang, K.H.; Chong, G.C. PID control system analysis and design. IEEE Control. Syst. Mag. 2006, 26, 32–41. [Google Scholar]
- Afkar, A.; Mahmoodi-Kaleibar, M.; Paykani, A. Geometry optimization of double wishbone suspension system via genetic algorithm for handling improvement. J. Vibroeng. 2012, 14, 827–837. [Google Scholar]
- Xu, Y.; Liao, H.; Liu, L.; Wang, Y. Modeling and robust H-infinite control of a novel non-contact ultra-quiet Stewart spacecraft. Acta Astronaut. 2015, 107, 274–289. [Google Scholar] [CrossRef]
- Nair, A.S.; Ezhilarasi, D. Performance analysis of super twisting sliding mode controller by ADAMS–MATLAB co-simulation in lower extremity exoskeleton. Int. J. Precis. Eng. Manuf.-Green Technol. 2020, 7, 743–754. [Google Scholar] [CrossRef]
- Affi, Z.; Romdhane, L. ADAMS/Simulink interface for dynamic modeling and control of closed loop mechanisms. In Proceedings of the 7th WSEAS International Conference on Automatic Control, Modeling and Simulation, Prague, Czech Republic, 13–15 March 2005; pp. 13–15. [Google Scholar]
- Shi, P.; Zhao, Q.; Wang, K.; Zhang, R.; Xiao, P. Simulation and verification analysis of the ride comfort of an in-wheel motor-driven electric vehicle based on a combination of ADAMS and MATLAB. Int. J. Model. Simul. Sci. Comput. 2022, 13, 2250002. [Google Scholar] [CrossRef]

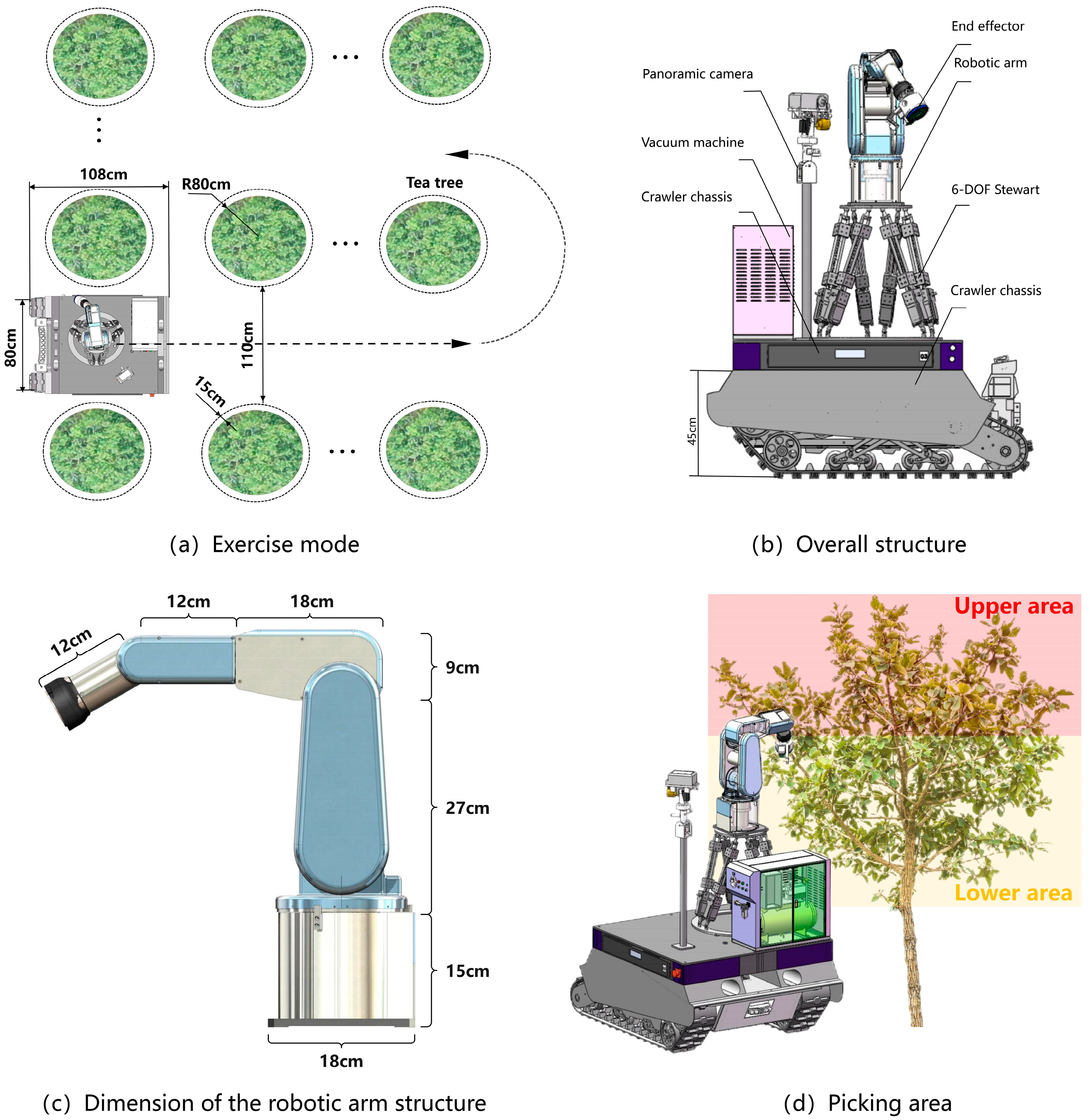





| Tree Species | R/m | Z/m | Y/m | X/m |
|---|---|---|---|---|
| Yunnan large leaf variety small tree-type tea tree | 0.8–1.0 | 1.5–1.8 | 0.6–1.0 | 1.1–1.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Yang, C.; Che, R.; Li, H.; Chen, Y.; Chen, L.; Yuan, W.; Yang, F.; Tian, J.; Wang, B. Assisted Tea Leaf Picking: The Design and Simulation of a 6-DOF Stewart Parallel Lifting Platform. Agronomy 2024, 14, 844. https://doi.org/10.3390/agronomy14040844
Wang Z, Yang C, Che R, Li H, Chen Y, Chen L, Yuan W, Yang F, Tian J, Wang B. Assisted Tea Leaf Picking: The Design and Simulation of a 6-DOF Stewart Parallel Lifting Platform. Agronomy. 2024; 14(4):844. https://doi.org/10.3390/agronomy14040844
Chicago/Turabian StyleWang, Zejun, Chunhua Yang, Raoqiong Che, Hongxu Li, Yaping Chen, Lijiao Chen, Wenxia Yuan, Fang Yang, Juan Tian, and Baijuan Wang. 2024. "Assisted Tea Leaf Picking: The Design and Simulation of a 6-DOF Stewart Parallel Lifting Platform" Agronomy 14, no. 4: 844. https://doi.org/10.3390/agronomy14040844
APA StyleWang, Z., Yang, C., Che, R., Li, H., Chen, Y., Chen, L., Yuan, W., Yang, F., Tian, J., & Wang, B. (2024). Assisted Tea Leaf Picking: The Design and Simulation of a 6-DOF Stewart Parallel Lifting Platform. Agronomy, 14(4), 844. https://doi.org/10.3390/agronomy14040844