
Analysis of Breaking and Separating Characteristics of Potato–Soil Aggregates Based on the New Type of Swing Separation Sieve

Abstract
:1. Introduction
2. Materials and Methods
2.1. Improved Design of the Swing Separation Sieve
2.1.1. Improvement of Separation Sieve Motion Mechanism
2.1.2. Theoretical Analysis of Separation Sieve Acceleration
2.1.3. Improvement of Separation Sieve Structure
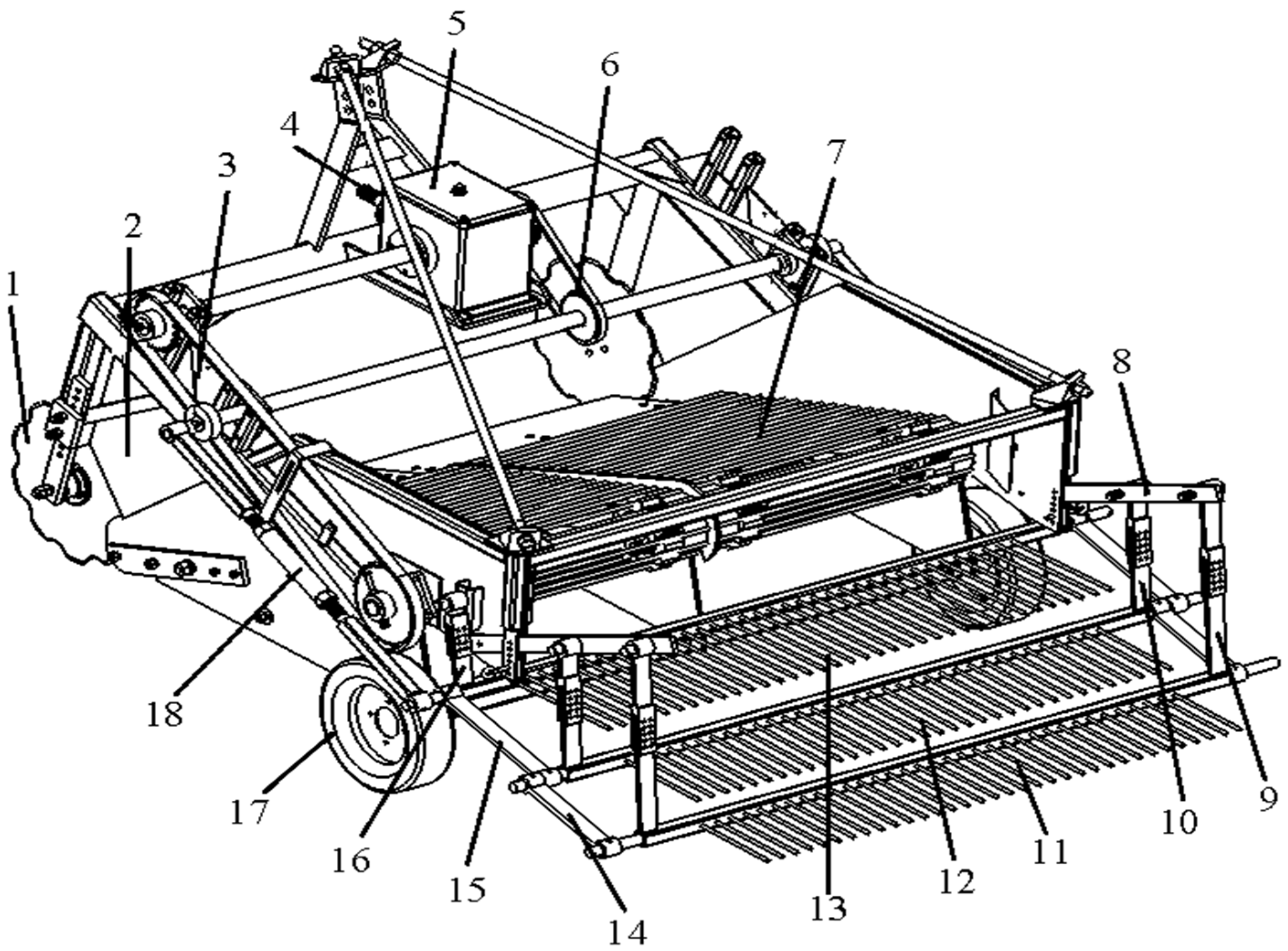
2.1.4. Structure and Working Principle of the Novel Swing Separation Sieve
2.2. Establishment of the Potato–Soil Aggregate Model
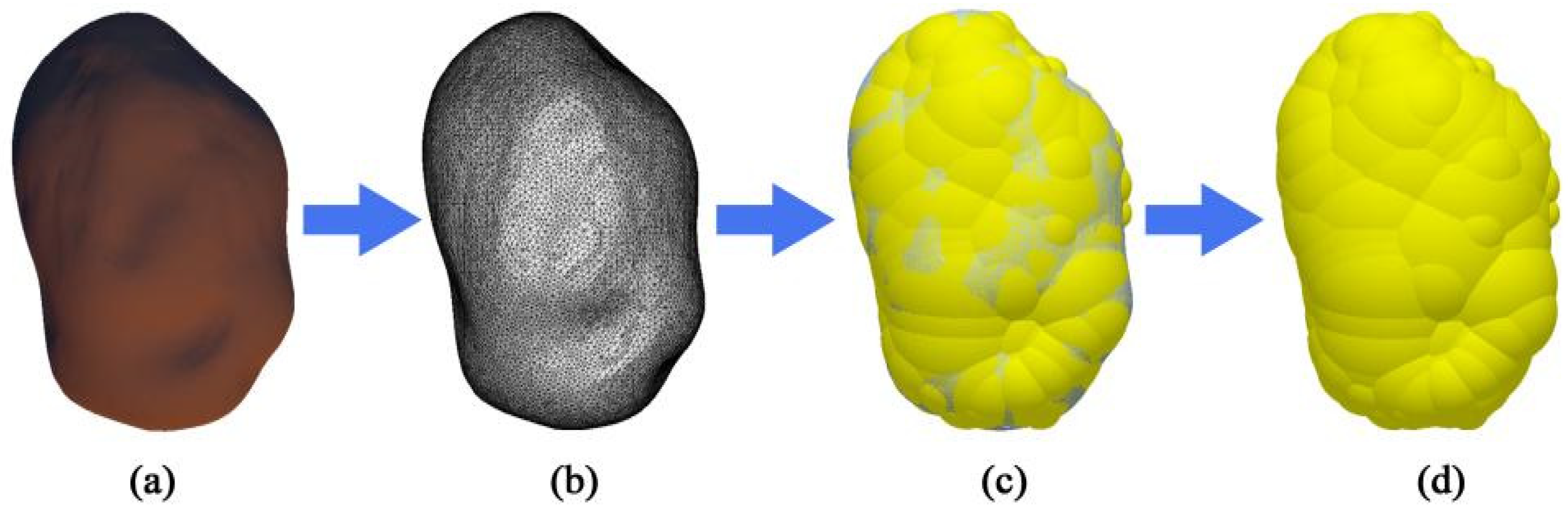
2.2.1. Establishment of the Potato Model
2.2.2. Soil Model Establishment
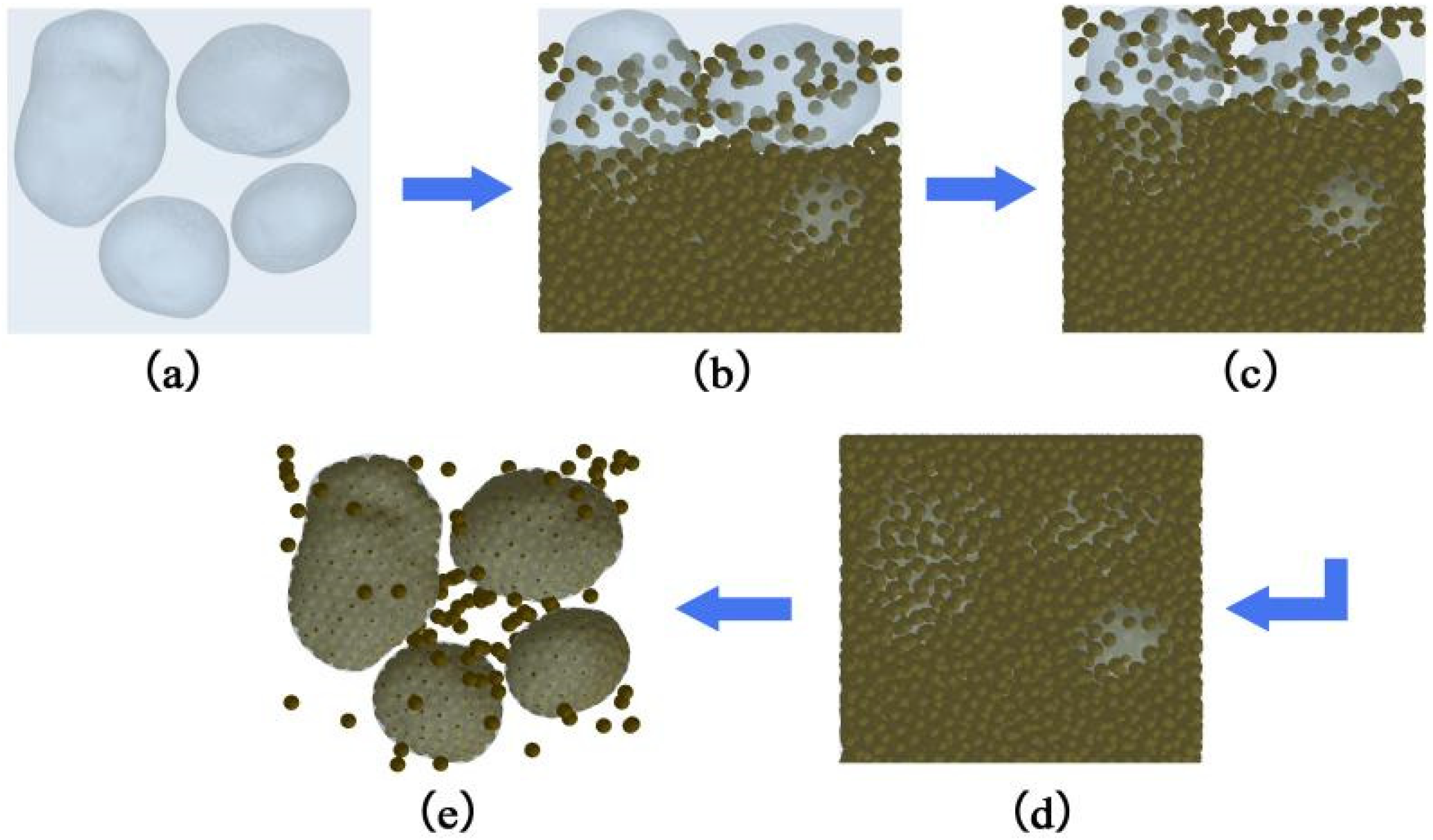
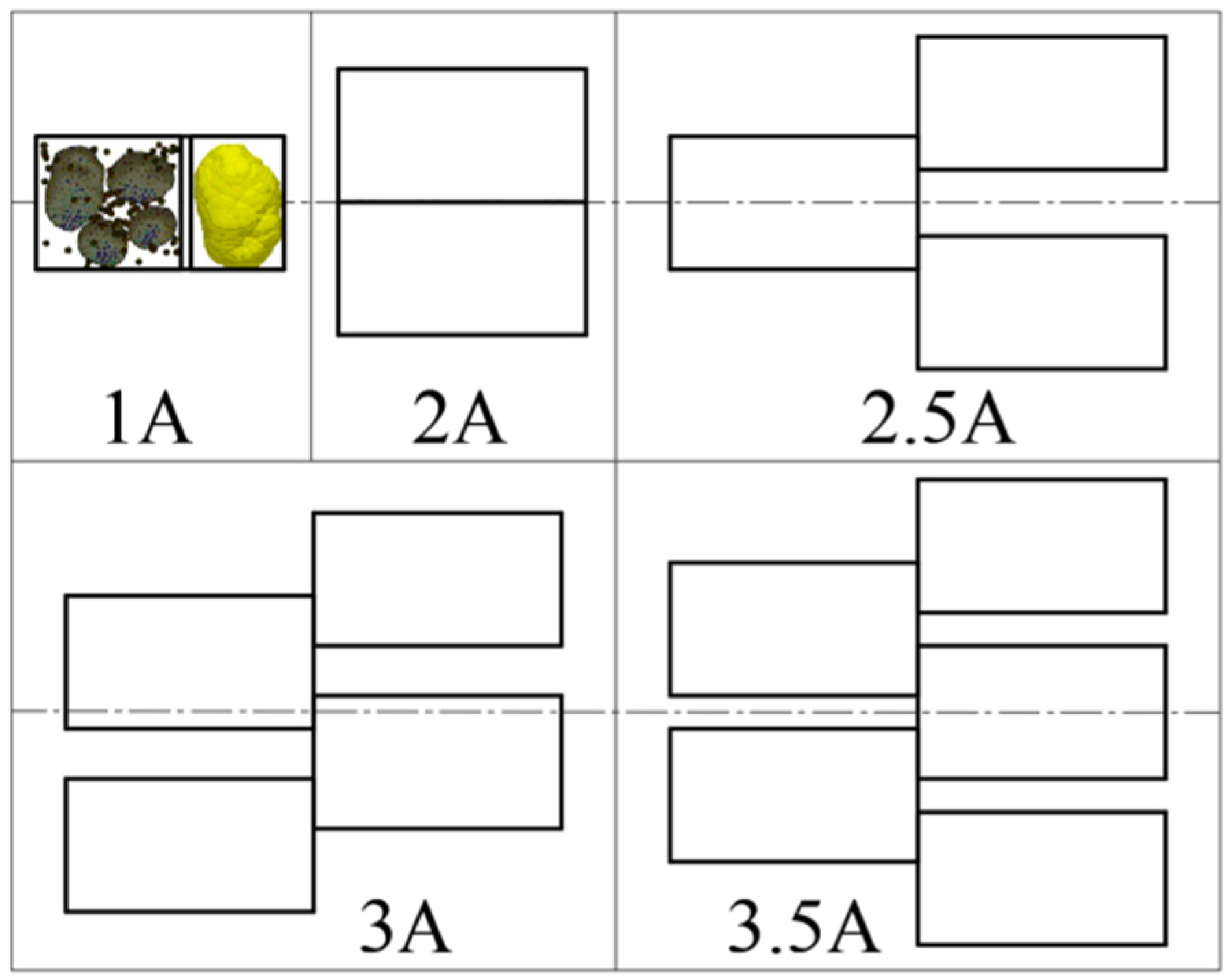
2.2.3. Establishment of Potato–Soil Aggregate Model
2.2.4. Establishment of Potato Excavator Separation Sieve Model
2.3. Simulation Experiment on Potato–Soil Aggregate Breakup and Separation
2.3.1. Experimental Equipment and Factor Levels
2.3.2. Experimental Indicators
- The proportion of bonding bond fracture
- 2.
- Peak force on the potato
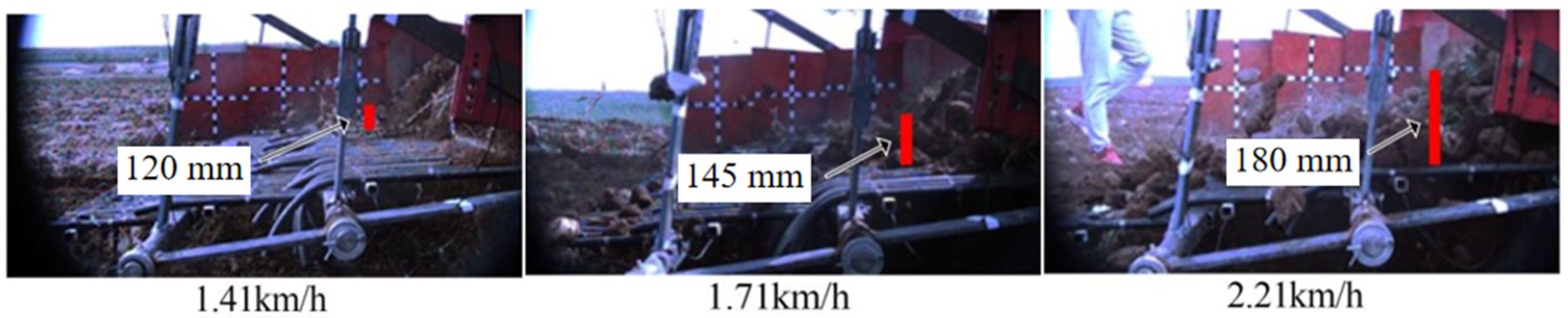
2.4. Field Validation Experiment
- : Weight of potatoes fully exposed on the ground after machine operation (kg).
- : Weight of potatoes with skin damage after machine operation (kg).
- : Total weight of harvested potatoes after machine operation (kg).
3. Results and Discussion
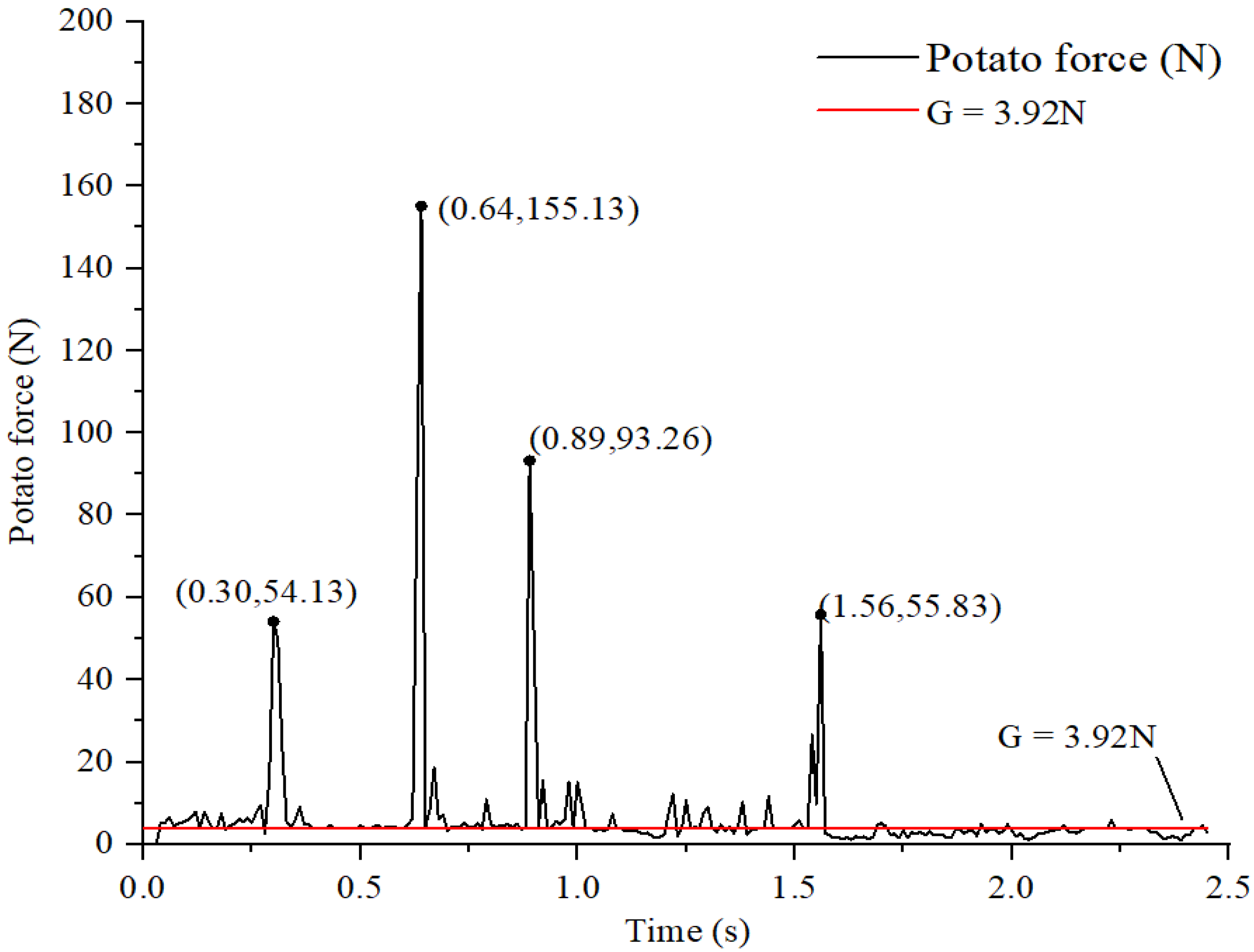
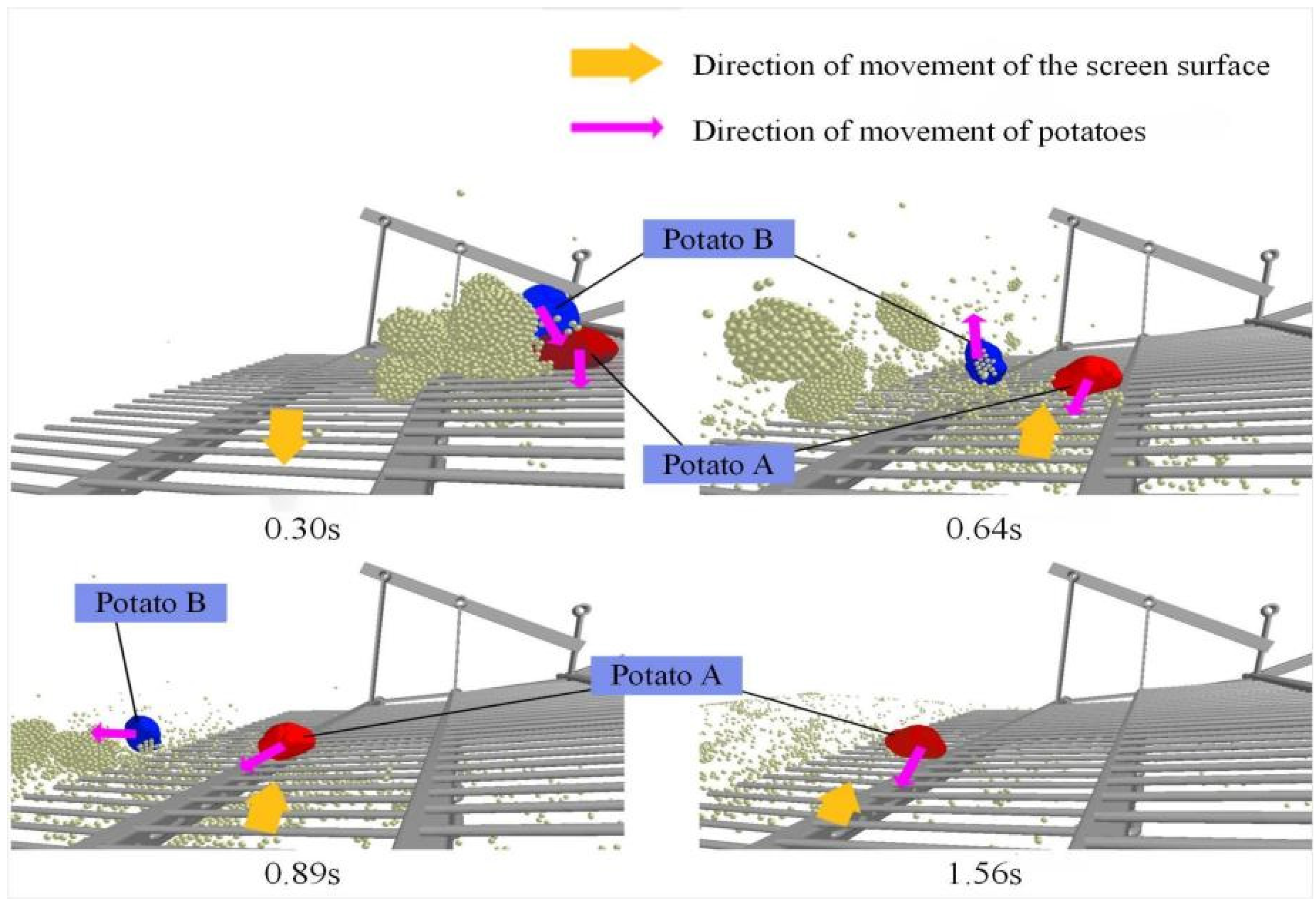
3.1. Analysis of Potato Force Process
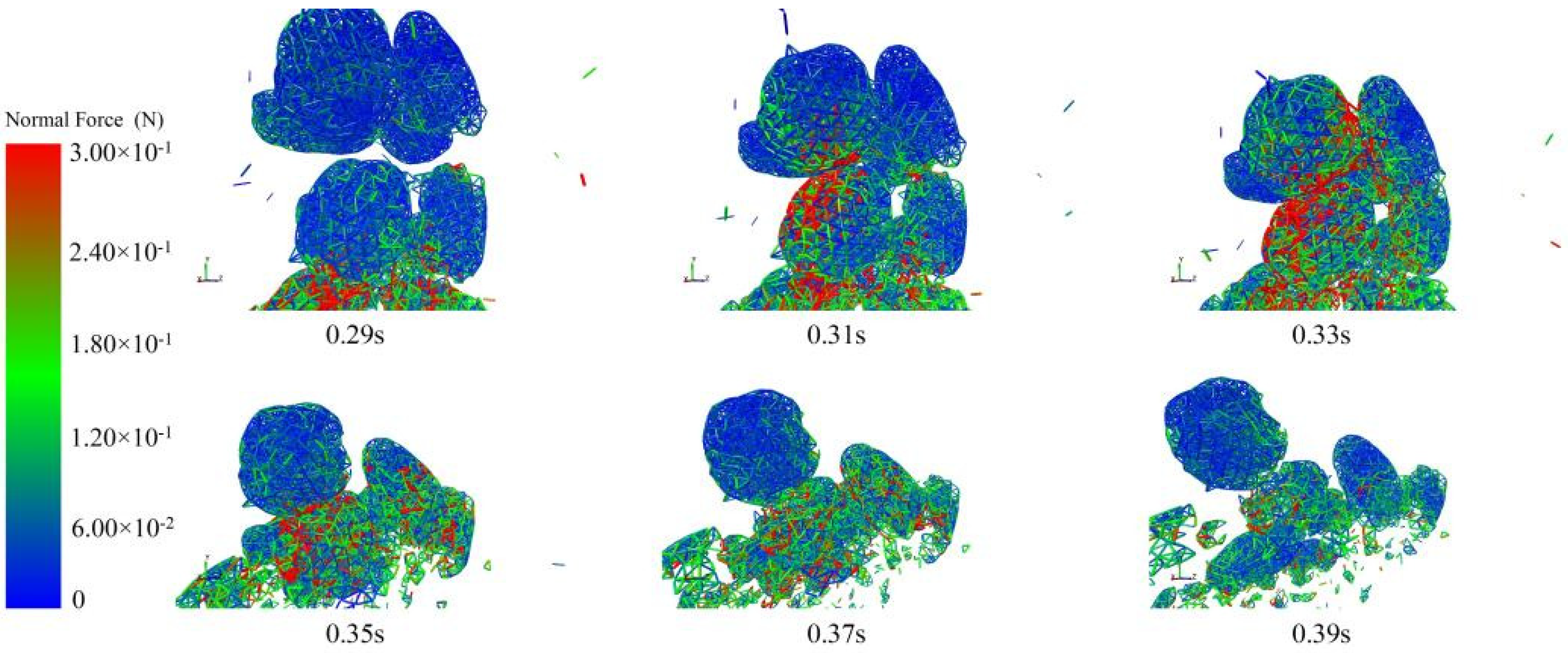
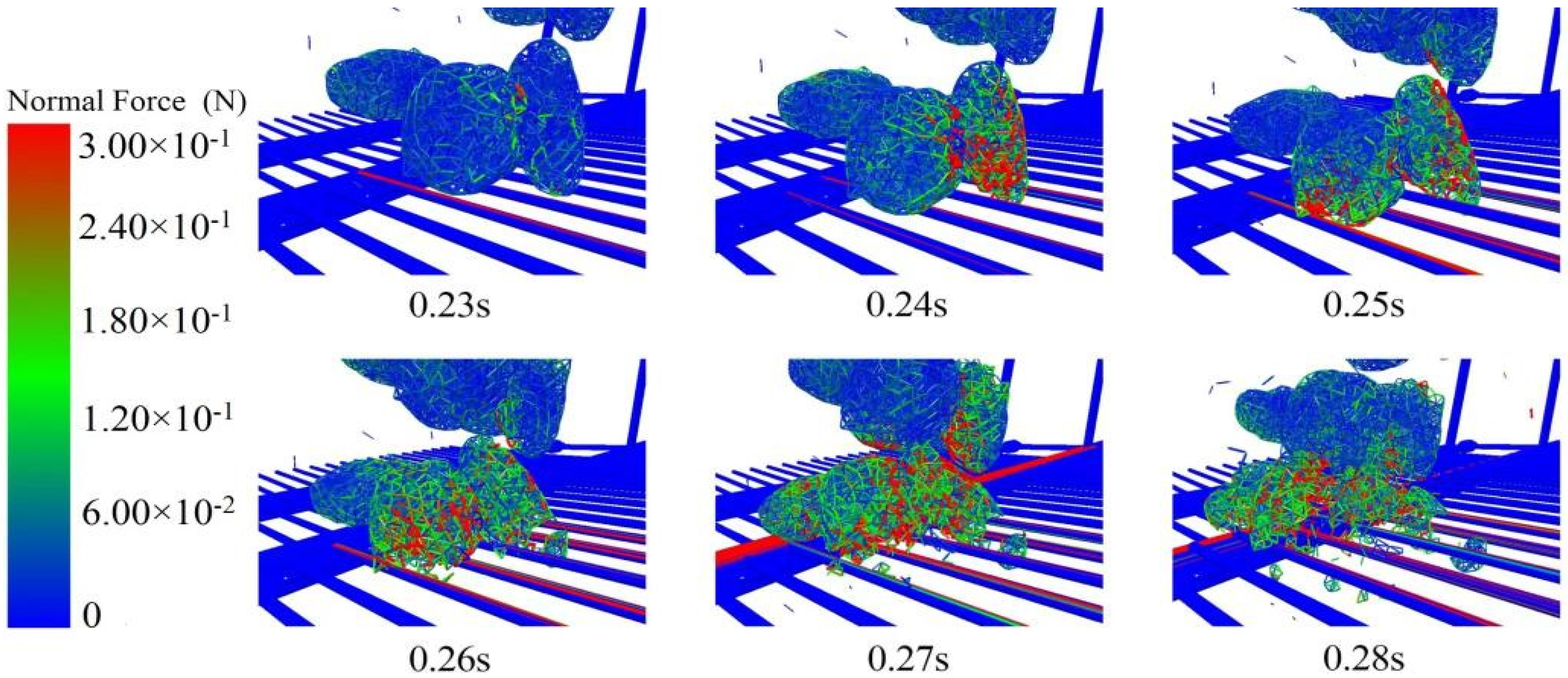
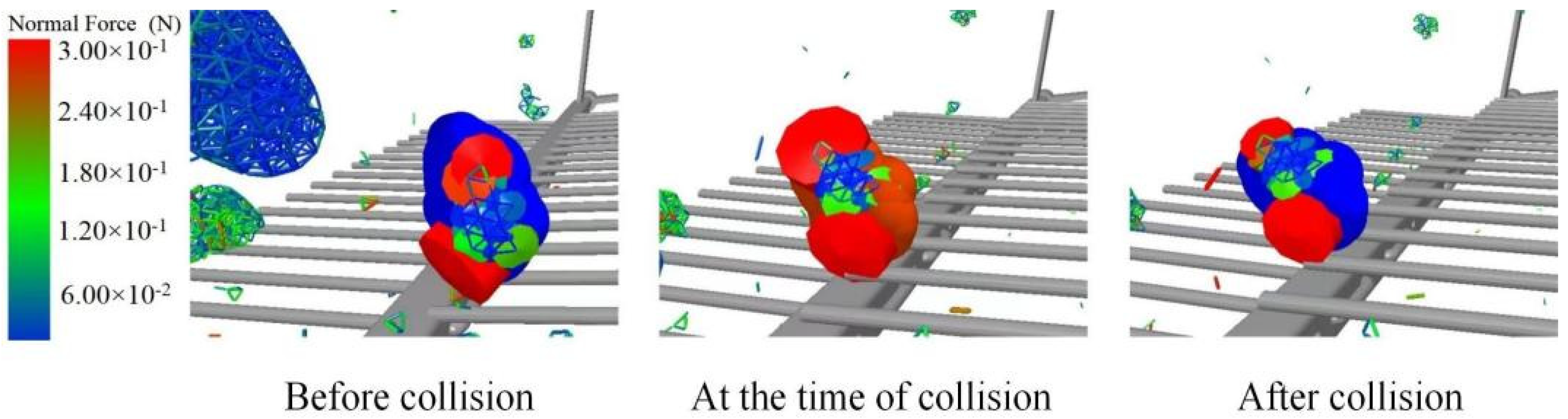
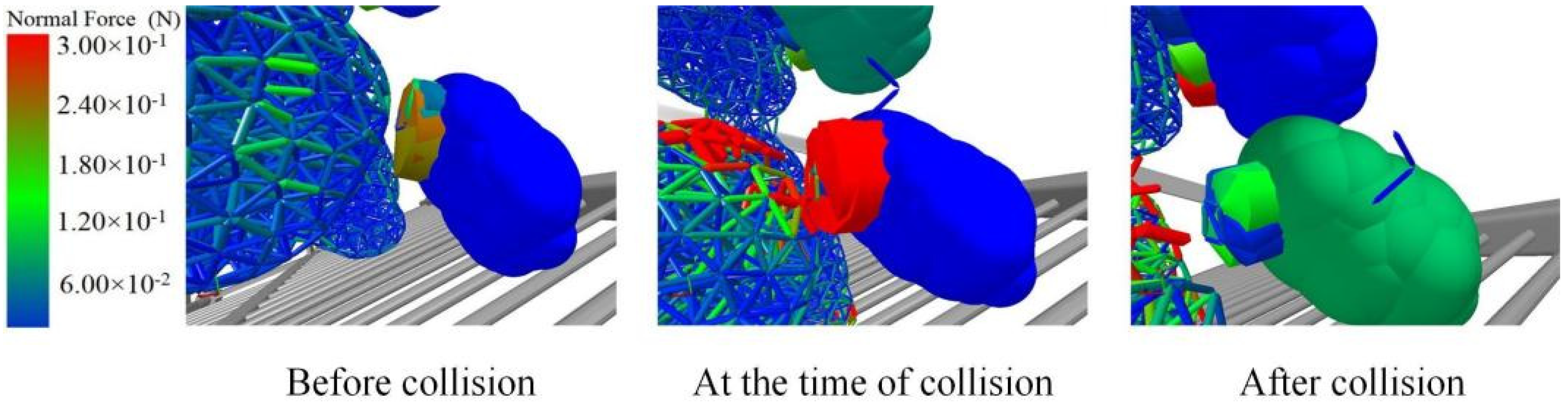
3.2. Analysis of Potato-Soil Aggregate Bonding Bond Fracture Process
3.2.1. Analysis of the Force on the Soil-Soil Bonding Bonds during Soil-to-Soil Collisions
3.2.2. Analysis of the Force on the Soil-Soil Bonding Bonds during Soil-Sieve Bar Collisions
3.2.3. Analysis of the Force on the Potato–Soil Bonding Bonds when the Potato Collides with the Sieve Bar First
3.2.4. Analysis of the Force on the Potato-Soil Bonding Bonds when the Soil Collides with the Sieve Bar First
3.3. Influence of Experimental Factors on Bonding Bond Fracture
3.3.1. The Influence of Crank Speed on the Bonding Bond Fracture
3.3.2. The Influence of Machine Forward Speed on the Bonding Bond Fracture Situation
3.3.3. Influence of Sieve Inclination on Bonding Key Fracture
3.4. The Influence of Experimental Factors on Potato Force Situation
3.4.1. The Influence of Crank Speed on Potato Force Situation
3.4.2. Effect of Machine Forward Speed on Potato Force Situation
3.4.3. The Effect of Sieve Surface Inclination on Potato Force Situation
3.5. Variance Analysis of Proportion of Bonding Bond Fracture and Peak Force on Potato under Different Levels of Experimental Factors
3.6. Analysis of Significant Differences between Interactions of Different Test Factors for Test Indicators
3.7. Results and Analysis of Field Validation Tests
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yao, Y.; Yang, J.; Xiao, G.; Zhao, H.; Lei, J.; Niu, H.; Zhang, X. Progress and Prospect of Research on the Impact of Climate Warming on Potato Growth and Yield. Ecol. Environ. Sci. 2017, 26, 538–546. [Google Scholar] [CrossRef]
- Chen, H.; Liu, Q. The Research Progress and Prospect of Potato Peeling Technology. Food Ind. 2016, 37, 229–232. [Google Scholar]
- Li, Z.; Chang, Q.; Liu, J.; Dong, X. Development Status and Trend of Domestic and Overseas Potato Harvesters. Mod. Manuf. Technol. Equip. 2020, 56, 207–208. [Google Scholar] [CrossRef]
- Zhang, Y. Potato cultivation techniques in Suihua. Seed World 2014, 374, 39–40. [Google Scholar] [CrossRef]
- He, J. Status Quo and Suggestions of China’s Potato Industry Development. Agric. Outlook 2020, 16, 34–39. [Google Scholar] [CrossRef]
- Lv, J.; Tian, Z.; Yang, Y.; Shang, Q.; Wu, J.; Li, Z.; Wang, X. The Development Situation, Existing Problems and Development Trend of Potato Machinery. J. Agric. Mech. Res. 2015, 37, 258–263. [Google Scholar] [CrossRef]
- Lv, J.; Su, H.; Dui, H.; Peng, M.; Yu, J. Design and Experiment on Conveyor Separation Device of Potato Digger under Heavy Soil Condition. Trans. Chin. Soc. Agric. Mach. 2017, 48, 146–155. [Google Scholar] [CrossRef]
- Li, H.; Gao, F. Improvement Design of Separation and Conveying Machinery and Equipment of Potato Excavator in Heavy Soil. Phys. Chem. Earth Parts A/B/C 2023, 130, 103363. [Google Scholar] [CrossRef]
- Yang, F.; Sun, B.; Zheng, X.; Wei, H.; Chai, S. Research Status and Development Trend of Potato Harvesters. For. Mach. Woodwork. Equip. 2021, 49, 4–10. [Google Scholar] [CrossRef]
- Wang, S.; Gao, A.; Meng, Y. The current situation and development trend of potato harvesters. For. Mach. Woodwork. Equip. 2023, 51, 12–16. [Google Scholar] [CrossRef]
- Lv, J.; Tian, Z.; Yang, Y.; Shang, Q.; Wu, J. Design and experimental analysis of 4U2A type double-row potato digger. Trans. Chin. Soc. Agric. Eng. 2015, 31, 17–24. [Google Scholar] [CrossRef]
- Wei, Z.; Li, H.; Sun, C.; Li, X.; Liu, W.; Su, G.; Wang, F. Improvement of potato harvester with two segment of vibration and wave separation. Trans. Chin. Soc. Agric. Eng. 2018, 34, 42–52. [Google Scholar] [CrossRef]
- Wu, J.; Li, H.; Sun, W.; Huang, X.; Zhang, W. Experiment on poke finger wheel type potato digger. Trans. Chin. Soc. Agric. Eng. 2011, 27, 173–177. [Google Scholar] [CrossRef]
- Yang, R.; Yang, H.; Shang, S.; Xu, P.; Cui, G.; Liu, L. Design and Test of Poking Roller Shoving Type Potato Harvester. Trans. Chin. Soc. Agric. Mach. 2016, 47, 119–126. [Google Scholar] [CrossRef]
- Shi, L.; Wu, J.; Zhao, W.; Sun, W.; Wang, D.; Li, H.; Liu, Q. Design and experiment on potato digger of disc ce-grate type. Trans. Chin. Soc. Agric. Eng. 2012, 28, 15–21. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, J.; Sun, W.; Luo, T.; Wang, D.; Zhang, J. The design and experiment of 4UM-640 vibration potato digger. Agric. Res. Arid Areas 2014, 32, 264–268. [Google Scholar]
- Feng, L. The Performance Study of the Potato Digger Sieve System. Master’s Thesis, Hebei Agricultural University, Baoding, China, July 2004. [Google Scholar]
- Zhao, M.; Zhao, S.; She, D.; Liu, H.; Liu, W.; Wang, Z. Combined separation type potato digger. J. Agric. Mech. Res. 2007, 4, 69–72. [Google Scholar] [CrossRef]
- Baritelle, A.L.; Hyde, G.M. Specific Gravity and Cultivar Effects on Potato Tuber Impact Sensitivity. Postharvest Biol. Technol. 2003, 29, 279–286. [Google Scholar] [CrossRef]
- Bentini, M.; Caprara, C.; Martelli, R. Harvesting Damage to Potato Tubers by Analysis of Impacts Recorded with an Instrumented Sphere. Biosyst. Eng. 2006, 94, 75–85. [Google Scholar] [CrossRef]
- Singh, R.D.; Singh, H.M. Comparative performance of potato digger elevator with conventional method of harvesting at farmer’s fields. Potato J. 2004, 31, 159–164. [Google Scholar] [CrossRef]
- Zhang, J.; Jin, L.; Xie, K.; Pang, W.; Bian, C.; Duan, S.; Qu, D. Comprehensive evaluation of potato bruises in different genotypes. Sci. Agric. Sin. 2009, 42, 198–203. [Google Scholar] [CrossRef]
- Opara, U.L.; Pathare, P.B. Bruise Damage Measurement and Analysis of Fresh Horticultural Produce—A Review. Postharvest Biol. Technol. 2014, 91, 9–24. [Google Scholar] [CrossRef]
- Yang, L. Simulation and Optimization on Parameters of Separation of Potato Digger. Master’s Thesis, Inner Mongolia Agricultural University, Hohhot, China, July 2009. [Google Scholar]
- Xie, S. Theoretical and Experimental Investigations of Potato Soil Separation on Swing Separation Sieve. Ph.D. Thesis, Inner Mongolia Agricultural University, Hohhot, China, July 2017. [Google Scholar]
- Xie, S.; Li, P.; Guo, Y.; Deng, W.; Wang, C. Acceleration characteristic analysis and performance experiment of a swing sepa-rationsieve. J. China Agric. Univ. 2023, 28, 207–219. [Google Scholar]
- Xie, S.; Lu, K.; Deng, W.; Wang, F.; Li, P.; Liu, G. Improved Design and Experiment of Separating Sieve for Potato Digger. Rev. Bras. Eng. Agríc. Ambient. 2023, 27, 966–972. [Google Scholar] [CrossRef]
- Li, J.; Xie, S.; Liu, F.; Guo, Y.; Liu, C.; Shang, Z.; Zhao, X. Calibration and Testing of Discrete Element Simulation Parameters for Sandy Soils in Potato Growing Areas. Appl. Sci. 2022, 12, 10125. [Google Scholar] [CrossRef]
- Yu, W.; Wang, L.; Zhao, X.; Du, Z. Simulation and Optimization Analysis of Oscillating Sieve in Unilinear Tractor Mounted Potato Harvester. J. Agric. Mech. Res. 2015, 37, 37–40. [Google Scholar] [CrossRef]
- Xie, S.; Wang, C.; Deng, W.; Li, X.; Qi, S. Separating Mechanism Analysis and Parameter Optimization Experiment of Swing Separation Sieve for Potato and Soil Mixture. Trans. Chin. Soc. Agric. Mach. 2017, 48, 156–164. [Google Scholar] [CrossRef]
- Li, P. Development and Performance Test of Three-Order Six–Boom Swing Separation Sieve. Master’s Thesis, Inner Mongolia Agricultural University, Hohhot, China, 2022. [Google Scholar] [CrossRef]
- Li, J.; Xie, S.; Liu, F.; Zhao, X. Research on Soil Fragmentation Characteristics Based on Fractal Dimension and Image Processing. Eng. Agríc. 2023, 43, e20220097. [Google Scholar] [CrossRef]
- Chen, Z.; Duan, H.; Cai, X.; Wang, J.; Xu, T.; Yu, C.; Yao, F.; Yan, F. Distribution characteristics of potato contact stress during the drop impact. J. South China Agric. Univ. 2020, 41, 99–108. [Google Scholar] [CrossRef]
- NY/T648-2015; Technical Specification for Quality Evaluation of Potato Harvesters. Ministry of Agriculture: Beijing, China, 2015.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values/(mm) |
|---|---|
| Crank radius | 35 |
| Crank connecting rod length | 1050 |
| Length of the connecting rod between the first- and second-order sieve surfaces | 370 |
| Length of the connecting rod between the second- and third-order sieve surfaces | 270 |
| Length of first-order sieve surface | 400 |
| Length of second-order sieve surface | 300 |
| Length of third-order sieve surface | 300 |
| Length of the suspension rod for the first-order sieve surface | 270 |
| Length of the suspension rod for the second-order sieve surface | 370 |
| Length of the suspension rod for the third-order sieve surface | 570 |
| Total length of the sieve surface | 1000 |
| Width of the sieve surface | 1700 |
| Parameters | Parameter Values |
|---|---|
| Recovery Coefficient of Soil–65 Mn Steel | 0.35 |
| Static Friction Coefficient of Soil–65 Mn Steel | 0.85 |
| Rolling Friction Coefficient of Soil–65 Mn Steel | 0.2 |
| Soil–Soil Recovery Coefficient | 0.15 |
| Soil–Soil Static Friction Coefficient | 0.35 |
| Soil–Soil Dynamic Friction Coefficient | 0.388 |
| JKR Surface Energy Coefficient | 0.371 |
| Poisson’s Ratio (ν) | Density (ρ) (kg/m3) | Shear Modulus (G) (Pa) | Young’s Modulus (E) (Pa) |
|---|---|---|---|
| 0.29 | 7801 | 8.023 × 1010 | 2.07 × 1011 |
| Level | Factor | ||
|---|---|---|---|
| Sieve Inclination Angle (°) | Crank Speed (r/min) | Machine Forward Speed (km/h) | |
| −2 | 0.5 | 140 | 0.63 |
| −1 | 7.7 | 160 | 1.47 |
| 0 | 14.4 | 180 | 1.90 |
| 1 | 21.1 | 200 | 2.32 |
| 2 | - | 220 | 2.75 |
| Crank Speed (r/min) | Soil–Soil Bonding Bond | Soil–Potato Bonding Bond | ||||
|---|---|---|---|---|---|---|
| Total Number of Generated Bonds | Number of Fractured Bonds | Proportion of Fracture (%) | Total Number of Generated Bonds | Number of Fractured Bonds | Proportion of Fracture (%) | |
| 140 | 32,948 | 19,590 | 59.46 ± 3.01 c | 74 | 17 | 22.97 ± 2.17 a |
| 160 | 32,906 | 21,204 | 64.44 ± 3.45 bc | 81 | 22 | 27.16 ± 2.10 a |
| 180 | 33,200 | 23,126 | 69.66 ± 1.70 ab | 100 | 28 | 28.00 ± 1.00 a |
| 200 | 33,115 | 24,247 | 73.22 ± 3.25 a | 102 | 24 | 23.53 ± 2.03 a |
| 220 | 32,915 | 25,183 | 76.51 ± 3.45 a | 70 | 17 | 24.29 ± 2.09 a |
| Machine Forward Speed (km/h) | Soil–Soil Bonding Bonds | Soil–Potato Bonding Bonds | ||||
|---|---|---|---|---|---|---|
| Total Number of Generated Bonds | Number of Fractured Bonds | Proportion of Fracture (%) | Total Number of Generated Bonds | Number of Fractured Bonds | Proportion of Fracture (%) | |
| 0.63 | 11,105 | 8691 | 78.26 ± 3.26 a | 24 | 5 | 19.18 ± 3.08 b |
| 1.47 | 22,222 | 14,917 | 67.13 ± 3.13 b | 46 | 12 | 25.90 ± 3.15 a |
| 1.90 | 33,200 | 23,126 | 69.66 ± 3.66 b | 100 | 28 | 28.00 ± 3.06 a |
| 2.32 | 43,990 | 31,243 | 71.02 ± 3.12 b | 150 | 28 | 18.71 ± 3.11 b |
| 2.75 | 54,805 | 38,354 | 69.98 ± 3.08 b | 164 | 33 | 20.28 ± 3.08 b |
| Sieve Inclination (°) | Soil–Soil Bonding Bonds | Soil–Potato Bonding Bonds | ||||
|---|---|---|---|---|---|---|
| Total Number of Generated Bonds | Number of Fractured Bonds | Proportion of Fracture (%) | Total Number of Generated Bonds | Number of Fractured Bonds | Proportion of Fracture (%) | |
| 0.5 | 32,938 | 27,834 | 84.50 ± 3.40 d | 89 | 38 | 84.50 ± 2.05 c |
| 7.7 | 33,200 | 23,126 | 69.66 ± 3.45 cd | 100 | 28 | 69.66 ± 2.31 ab |
| 14.4 | 33,200 | 19,256 | 58.00 ± 1.30 bc | 100 | 27 | 58.00 ± 2.58 a |
| 21.1 | 32,824 | 15,534 | 47.33 ± 3.25 ab | 87 | 14 | 47.33 ± 2.86 bc |
| Sequence Number | Crank Speed (r/min) | Peak Force on Potatoes (N) |
|---|---|---|
| 1 | 140 | 62.83 ± 8.01 e |
| 2 | 160 | 84.43 ± 10.01 d |
| 3 | 180 | 149.13 ± 6.04 c |
| 4 | 200 | 196.60 ± 8.06 b |
| 5 | 220 | 267.37 ± 9.53 a |
| Serial Number | Machine Forward Speed (km/h) | Peak Force on Potatoes (N) |
|---|---|---|
| 1 | 0.63 | 348.00 ± 7.1 a |
| 2 | 1.47 | 159.63 ± 9.03 b |
| 3 | 1.90 | 149.13 ± 9.03 bc |
| 4 | 2.32 | 142.77 ± 8.07 c |
| 5 | 2.75 | 87.23 ± 7.03 d |
| Serial Number | Sieve Surface Inclination (°) | Peak Force on Potatoes (N) |
|---|---|---|
| 1 | 0.5 | 183.21 ± 8.01 d |
| 2 | 7.7 | 149.13 ± 10.01 c |
| 3 | 14.4 | 183.25 ± 8.03 b |
| 4 | 21.1 | 116.21 ± 8.06 a |
| Test Factor | Test Indicator | Sum of Squares | Mean Square | F | p | |
|---|---|---|---|---|---|---|
| Sieve surface inclination/° | Proportion of fracture (soil–soil) | Intergroup | 0.056 | 0.014 | 14.626 | <0.0001 ** |
| Inside group | 0.01 | 0.001 | ||||
| Total | 0.065 | |||||
| Proportion of fracture (soil–potato) | Intergroup | 0.006 | 0.002 | 3.801 | 0.039 * | |
| Inside group | 0.004 | 0 | ||||
| Total | 0.01 | |||||
| Peak force on potatoes | Intergroup | 83,256.044 | 20,814.011 | 270.571 | <0.0001 ** | |
| Inside group | 769.263 | 76.926 | ||||
| Total | 84,025.306 | |||||
| Machine forward speed/(m/s) | Proportion of fracture (soil–soil) | Intergroup | 0.021 | 0.005 | 4.97 | 0.018 * |
| Inside group | 0.011 | 0.001 | ||||
| Total | 0.032 | |||||
| Proportion of fracture (soil–potato) | Intergroup | 0.022 | 0.005 | 5.636 | 0.012 * | |
| Inside group | 0.01 | 0.001 | ||||
| Total | 0.031 | |||||
| Peak force on potatoes | Intergroup | 118,647.54 | 29,661.885 | 452.111 | <0.0001 ** | |
| Inside group | 656.075 | 65.608 | ||||
| Total | 119,303.62 | |||||
| Crank speed/(r/min) | Proportion of fracture (soil–soil) | Intergroup | 0.058 | 0.014 | 15.542 | <0.0001 ** |
| Inside group | 0.009 | 0.001 | ||||
| Total | 0.067 | |||||
| Proportion of fracture (soil–potato) | Intergroup | 0.006 | 0.002 | 4.085 | 0.032 * | |
| Inside group | 0.004 | 0 | ||||
| Total | 0.01 | |||||
| Peak force on potatoes | Intergroup | 83,256.044 | 20,814.011 | 291.847 | <0.0001 ** | |
| Inside group | 713.183 | 71.318 | ||||
| Total | 83,969.226 |
| Test Indicators | (I) Test Factors | (J) Test Factors | Average Difference (I − J) | Standard Error | p |
|---|---|---|---|---|---|
| Proportion of fracture (soil–soil) | Crank speed | Machine forward speed | −2.552 | 6.08812 | 0.683 |
| Sieve surface inclination | 3.7855 | 6.45743 | 0.57 | ||
| Machine forward speed | Crank speed | 2.552 | 6.08812 | 0.683 | |
| Sieve surface inclination | 6.3375 | 6.45743 | 0.347 | ||
| Sieve surface inclination | Crank speed | −3.7855 | 6.45743 | 0.57 | |
| Machine forward speed | −6.3375 | 6.45743 | 0.347 | ||
| Proportion of fracture (soil–potato) | Crank speed | Machine forward speed | 2.776 | 4.04743 | 0.507 |
| Sieve surface inclination | −3.2575 | 4.29295 | 0.464 | ||
| Machine forward speed | Crank speed | −2.776 | 4.04743 | 0.507 | |
| Sieve surface inclination | −6.0335 | 4.29295 | 0.187 | ||
| Sieve surface inclination | Crank speed | 3.2575 | 4.29295 | 0.464 | |
| Machine forward speed | 6.0335 | 4.29295 | 0.187 | ||
| Peak force on potatoes | Crank speed | Machine forward speed | −25.28 | 50.62229 | 0.627 |
| Sieve surface inclination | −5.878 | 53.69305 | 0.915 | ||
| Machine forward speed | Crank speed | 25.28 | 50.62229 | 0.627 | |
| Sieve surface inclination | 19.402 | 53.69305 | 0.725 | ||
| Sieve surface inclination | Crank speed | 5.878 | 53.69305 | 0.915 | |
| Machine forward speed | −19.402 | 53.69305 | 0.725 |
| Parameters | ||||
|---|---|---|---|---|
| Crank Speed (r/min) | Forward Speed (km/h) | Sieve Surface Inclination (°) | Potato Detection Rate (%) | Potato Skin Breakage Rate (%) |
| 180 | 1.9 | 14.4 | 98.01 | 0.68 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, S.; Zhang, Y.; Li, J.; Liu, F. Analysis of Breaking and Separating Characteristics of Potato–Soil Aggregates Based on the New Type of Swing Separation Sieve. Agronomy 2024, 14, 1272. https://doi.org/10.3390/agronomy14061272
Xie S, Zhang Y, Li J, Liu F. Analysis of Breaking and Separating Characteristics of Potato–Soil Aggregates Based on the New Type of Swing Separation Sieve. Agronomy. 2024; 14(6):1272. https://doi.org/10.3390/agronomy14061272
Chicago/Turabian StyleXie, Shengshi, Yufeng Zhang, Junru Li, and Fei Liu. 2024. "Analysis of Breaking and Separating Characteristics of Potato–Soil Aggregates Based on the New Type of Swing Separation Sieve" Agronomy 14, no. 6: 1272. https://doi.org/10.3390/agronomy14061272