
Design and Test of Novel Uniform Application Equipment with Nozzles Swinging Horizontally Used for UAVs


Abstract
:1. Introduction
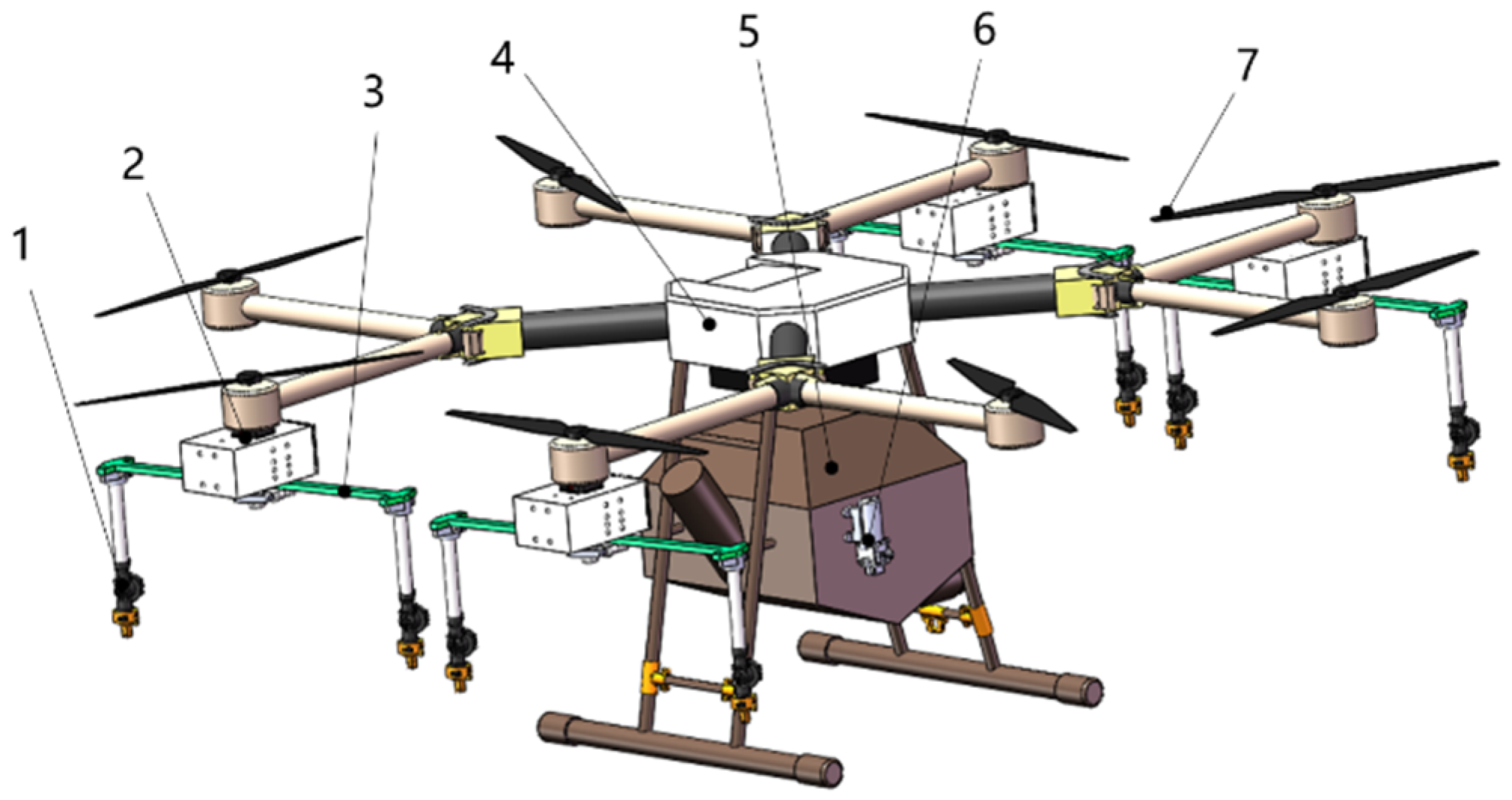
2. Machine Structure and Working Principle
3. Design of Key Component
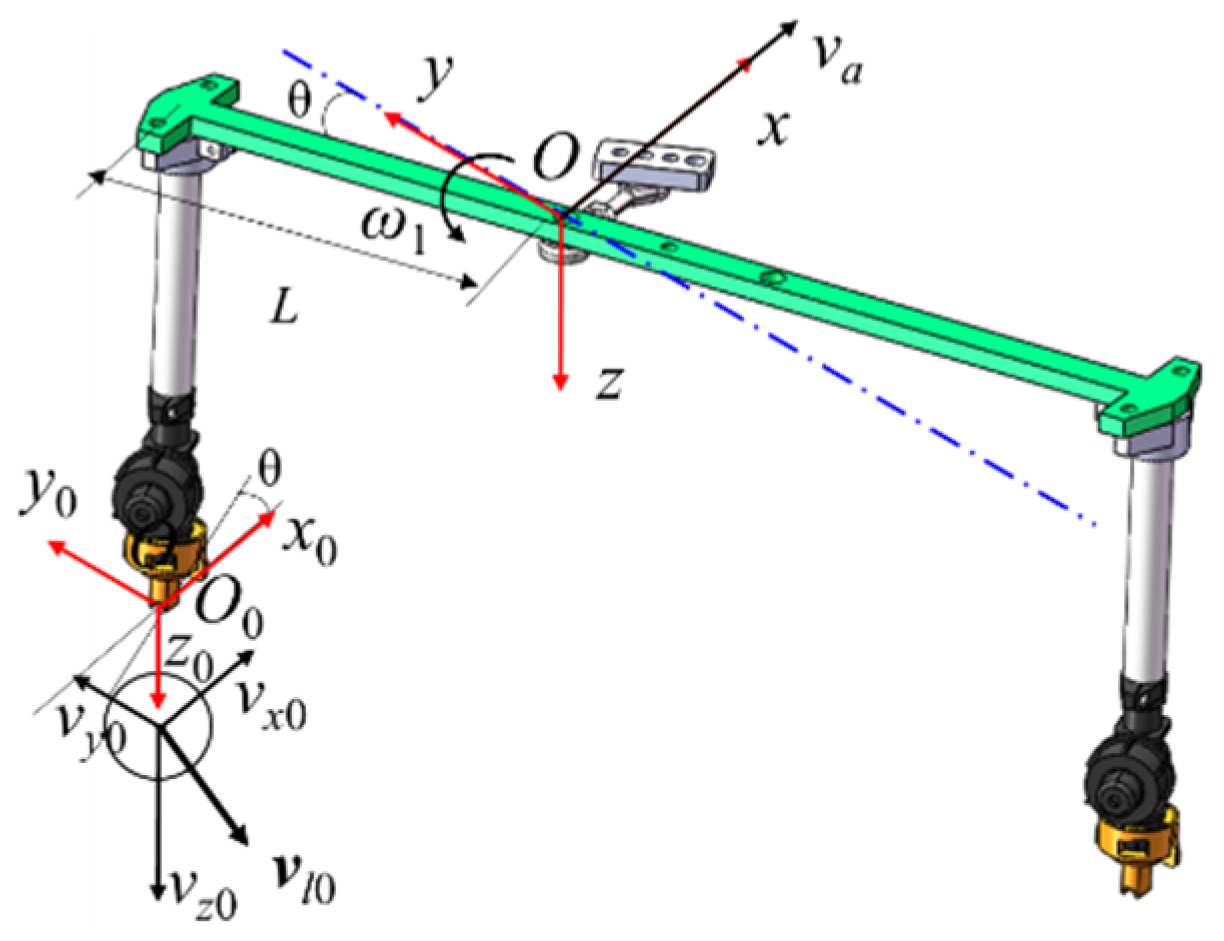
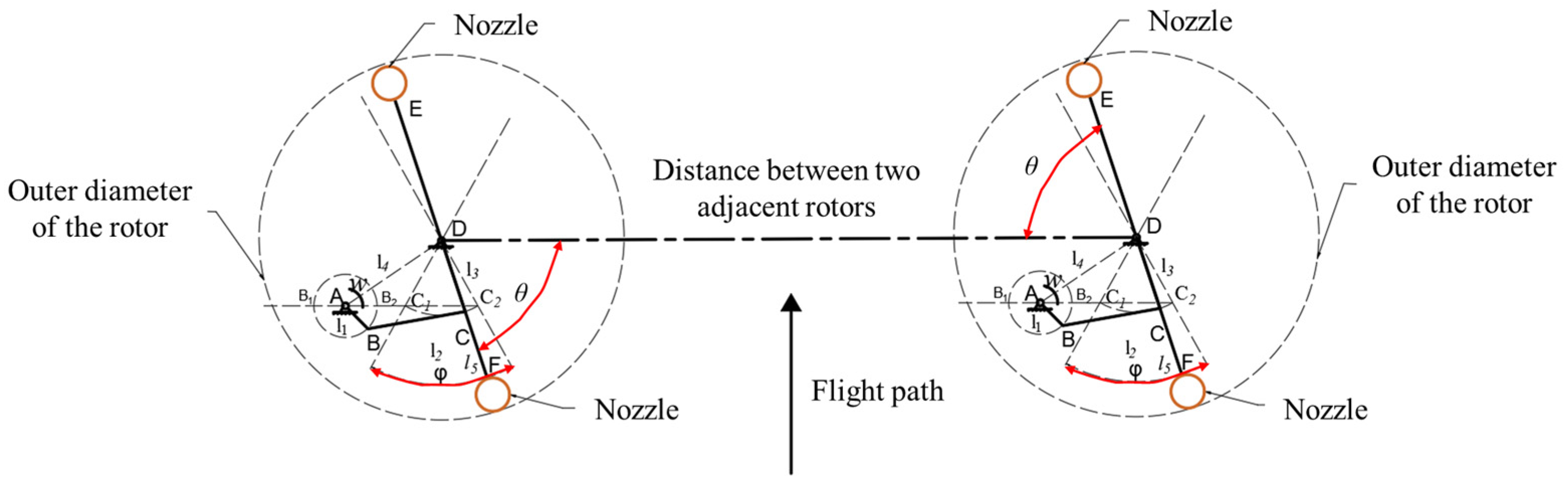
3.1. Structural Design of the Swinging Device
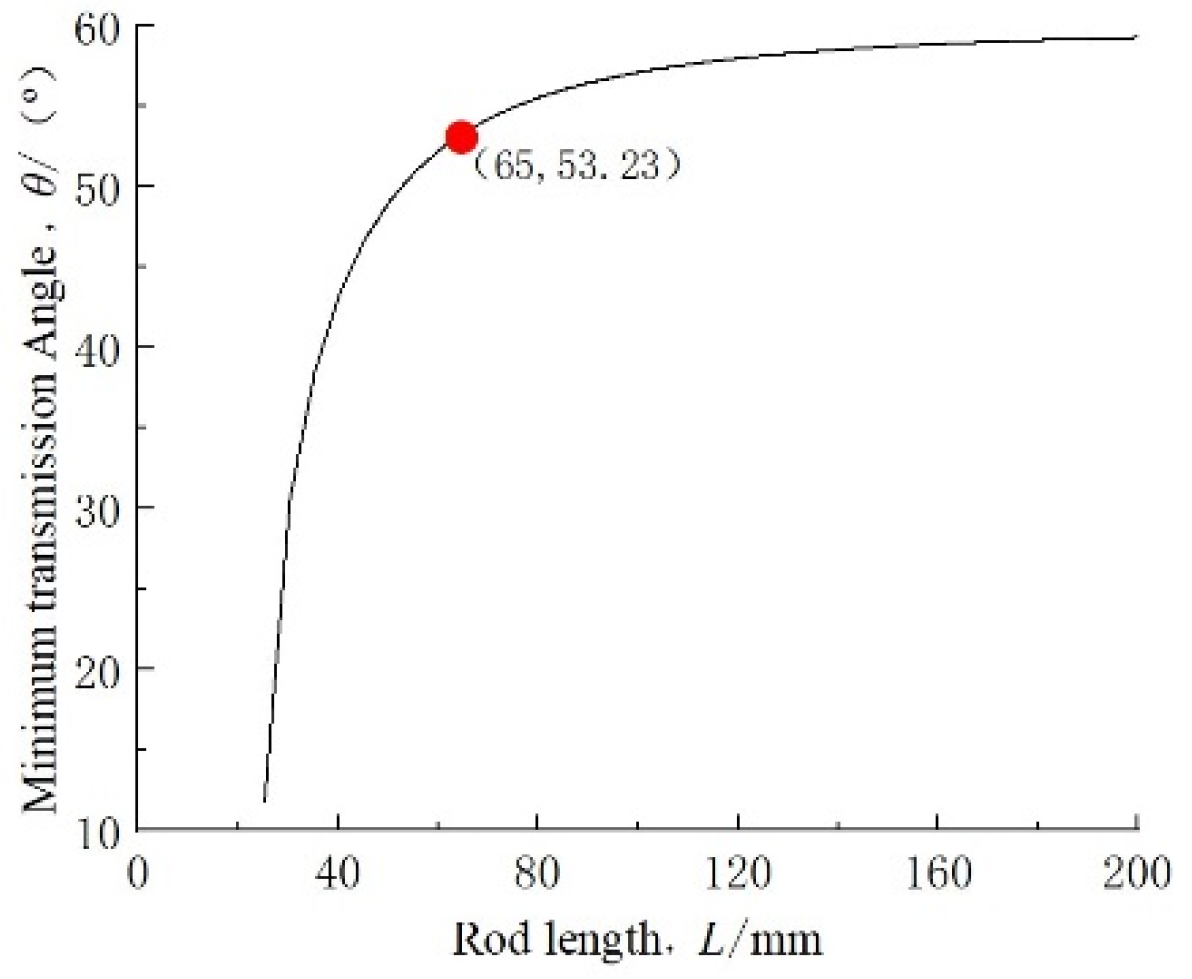
3.2. Dimensional Design of the Oscillating Device
3.3. Parameters Affecting the Performance of the Uniform Application Equipment
4. Parameter Optimization of the Oscillating Device
4.1. Single-Factor Analysis of the Influence of Parameters on the Droplet Deposition Patterns Using CFD Simulation
4.1.1. Simulation Model and Parameter Settings
4.1.2. Methods of Simulation Experiments
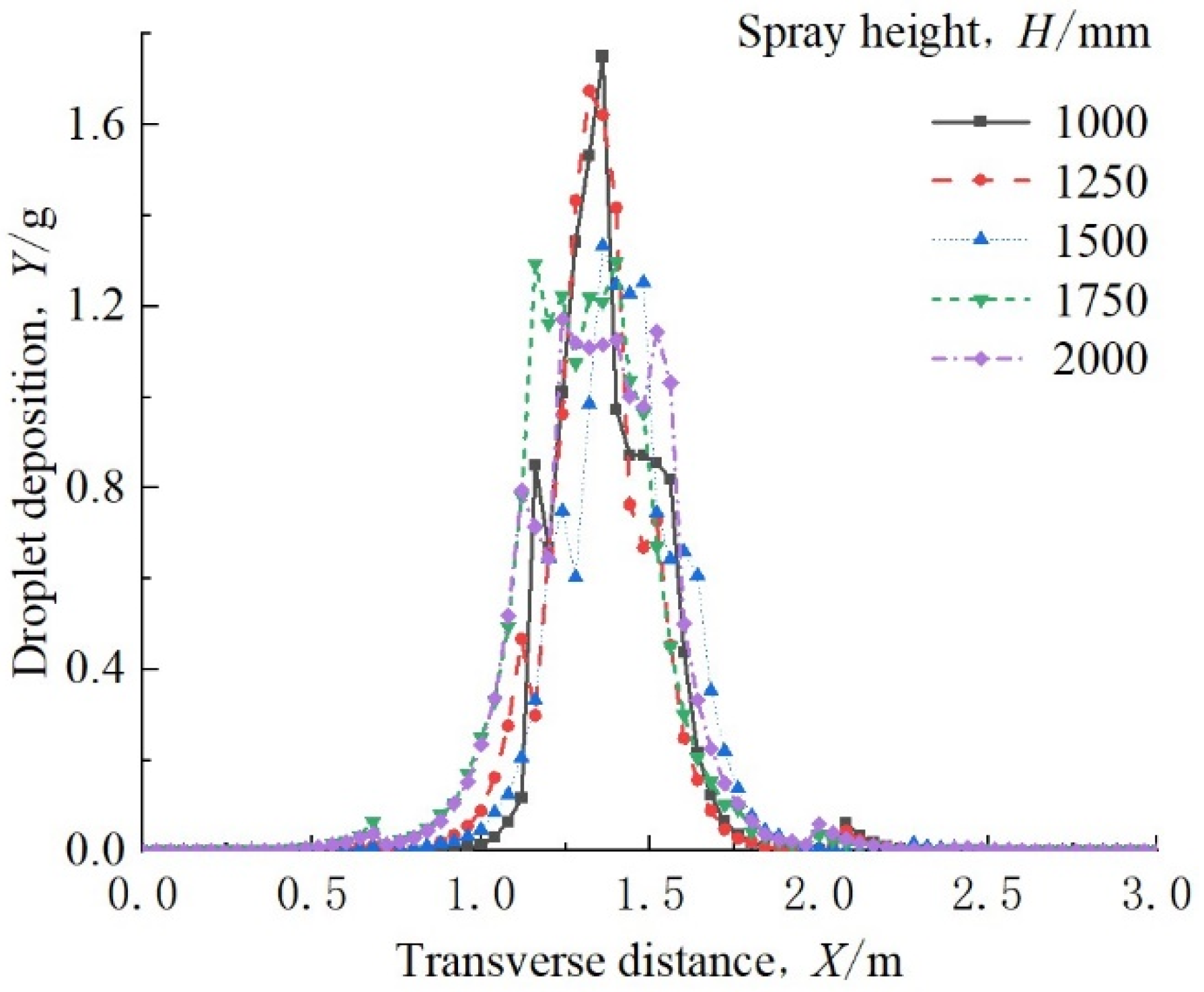
4.1.3. Results and Analysis of the Single-Factor Simulation Experiments
4.2. Optimization of the Oscillating Device Structure and Operating Parameters
4.2.1. Experimental Method and Equipment


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code | L/(mm) | θ/(°) | H/(m) |
|---|---|---|---|
| −1 | 90 | −15 | 1 |
| 0 | 140 | 0 | 1.5 |
| +1 | 190 | 15 | 2 |
4.2.2. Results and Analysis of Parameter Optimization Experiments
5. Comparative Experiments in the Field
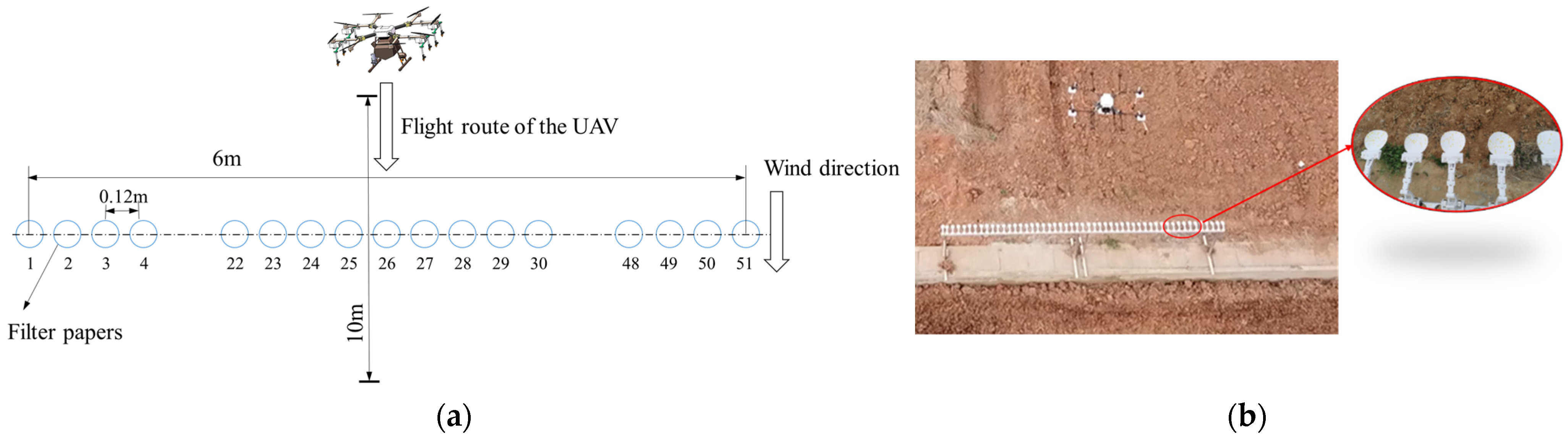
5.1. Experimental Method and Equipment
5.2. Results and Analysis of the Comparative Experiments
6. Discussion
7. Conclusions
- Through mechanical analysis, the main factors affecting the distribution of droplet deposition in the uniform equipment were identified as motor speed, nozzle angle, oscillating rod length, spray height, airflow velocity, and droplet size.
- Single-factor influence analysis of working parameter H and structural parameters L, θ through flow field simulation revealed favorable parameter ranges for achieving even droplet deposition: rod length between 90 and 190 mm, nozzle angle between −15° to 15°, and spray height between 1 and 2 m.
- By conducting a three-factor and three-level quadratic orthogonal test on the experimental platform, fitting formulas between working parameter H, structural parameters L, θ, and the index CV value were obtained. The optimal parameter combination was determined as follows: L of 175 mm, θ of 15°, and H of 1.5 m.
- Using the optimal parameter combination, a prototype was developed, and field comparative experiments were conducted by only changing the application equipment on the plant protection UAV while keeping other parameters constant. The application equipment designed in this study showed good performance in the uniform distribution of droplet deposition. The distribution of the UAV before improvement exhibited an “M” shape with a CV value of 32.84%. After improvement, the distribution showed a trapezoidal shape with a CV value of 26.41%, representing a decrease of 6.43 percentage points and a decrease of 19.58% in CV value. It demonstrates the feasibility of using this equipment for spraying to improve the uniformity of droplet deposition in the spray width for the measured plant protection UAV. Subsequent research will further advance related studies.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xue, X.; Yang, Z.; Liang, X.; Luo, Q.; Lv, S.; Li, Z. Application and experiments of the atomization mesh used on the plant protection spraying in orchards. Trans. CSAE 2022, 38, 1–10. [Google Scholar] [CrossRef]
- Xiao, Y.; Wu, C.; Wu, K. Agricultural pest control in China over the past 70 years: Achievements and future prospects. Chin. J. Appl. Entomol. 2019, 56, 1115–1124. [Google Scholar] [CrossRef]
- Cui, L.; Xue, X.; Le, F.; Ding, S. Design and evaluation method of testing bench for spray boom suspension systems. Trans. CSAE 2019, 35, 23–31. [Google Scholar] [CrossRef]
- He, X. Research and development of efficient plant protection equipment and precision spraying technology in China. J. Plant Prot. 2022, 49, 389–397. [Google Scholar] [CrossRef]
- Zhai, C.; Zhang, Y.; Zou, W.; Song, J.; Han, C.L.; Dou, H. Design and test of precision variable-rate spray monitoring and control system based on pesticide spraying traceability. Trans. CSAM 2024, 55, 160–169. [Google Scholar] [CrossRef]
- Qiu, W.; Li, X.; Li, C.; Ding, W.; Lv, X.; Liu, Y. Design and test of a novel crawler-type multi-channel air-assisted orchard sprayer. Int. J. Agric. Biol. Eng. 2020, 13, 60–67. [Google Scholar] [CrossRef]
- Qiu, W.; Sun, H.; Sun, Y.; Liao, Y.; Zhou, L.; Wen, Z. Design and test of circulating air-assisted sprayer for dwarfed orchard. Trans. CSAE 2021, 37, 18–25. [Google Scholar] [CrossRef]
- Ru, Y.; Chen, X.; Liu, B.; Wang, S.; Lin, Y. Optimized design and performance test of axial flow orchard sprayer air delivery system. Trans. CSAM 2022, 53, 147–157. [Google Scholar] [CrossRef]
- Xing, Q. The Design and Performance Test on Height Gap Narrow-Shaped Rubber Crawler and Wide Crop Protection Fertilization Machine for Dual-Purpose in Floods or Droughts. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, 2013. [Google Scholar]
- Gao, Y. Study on Distribution of Pesticide Droplets in Gramineous Crop Canopy and Control Effect Sprayed by Unmanned Aerial Vehicle. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2013. [Google Scholar]
- Zheng, J.; Xu, Y. Development and prospect in environment-friendly pesticide sprayers. Trans. CSAM 2021, 52, 1–16. [Google Scholar] [CrossRef]
- Zhang, P.; Deng, L.; Lyu, Q.; He, S.; Yi, S.; Liu, Y.; Yu, Y.; Pan, H. Effects of citrus tree-shape and spraying height of small unmanned aerial vehicle on droplet distribution. Int. J. Agric. Biol. Eng. 2016, 9, 45–52. [Google Scholar] [CrossRef]
- Liu, X.; Liu, X.; Cui, H.; Yuan, J. Research progress and trend analysis of crop canopy droplet deposition. Trans. CSAM 2021, 52, 1–20. [Google Scholar] [CrossRef]
- Wang, C.; Song, J.; He, X.; Wang, Z.; Wang, S.; Meng, Y. Effect of flight parameters on distribution characteristics of pesticide spraying droplets deposition of plant-protection unmanned aerial vehicle. Trans. CSAE 2017, 33, 109–116. [Google Scholar] [CrossRef]
- Wang, L.; Cai, D.; Wu, J.; Ding, G.; Zhu, Z.; Qiu, B. Experimental study of small unmanned helicopter spray deposition. J. Agric. Mech. Res. 2013, 35, 183–185. [Google Scholar] [CrossRef]
- Chojnacki, J.; Pachuta, A. Impact of the parameters of spraying with a small unmanned aerial vehicle on the distribution of liquid on young cherry trees. Agriculture 2021, 11, 13. [Google Scholar] [CrossRef]
- Tang, Q.; Chen, L.; Zhang, R.; Deng, W.; Xu, M.; Xu, G.; Li, L.; Hewitt, A. Effects of application height and crosswind on the crop spraying performance of unmanned helicopters. Comput. Electron. Agric. 2021, 181, 105961. [Google Scholar] [CrossRef]
- Biglia, A.; Grella, M.; Bloise, N.; Comba, L.; Mozzanini, E.; Sopegno, A.; Pittarello, M.; Dicembrini, E.; Alcatrão, L.E.; Guglieri, G.; et al. UAV-spray application in vineyards: Flight modes and spray system adjustment effects on canopy deposit, coverage, and off-target losses. Sci. Total Environ. 2022, 845, 157292. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Zhang, R.; Chen, L.; Tang, Q.; Xu, G. Key technology analysis and research progress of UAV intelligent plant protection. Smart Agric. 2019, 1, 20–33. [Google Scholar] [CrossRef]
- Anken, T.; Saravanan, G.; Waldburger, T.; Werthmüller, J.; Wohlhauser, R.; Sanderson, G. Transversal distribution of a spray drone applying different nozzles and measuring methods. Crop Prot. 2024, 179, 106603. [Google Scholar] [CrossRef]
- Bonds, J.A.S.; Brad, F.; Thistle, H.W. Calculation of swath width and swath displacement for unscrewed aerial spray systems. J. ASABE 2023, 66, 523–532. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, C.; Chen, Q.; Zhou, H.; Yang, F.; Ru, Y. Effect of ambient wind speed on downwash airflow and droplet deposition for six-rotor UAV. Trans. CSAM 2022, 53, 74–81. Available online: http://www.nyjxxb.net/index.php/journal/article/view/1412 (accessed on 10 July 2024).
- Liu, Q.; Lan, Y.; Shan, C.; Mao, Y. The influence of spraying parameters of aerial application on droplet deposition characteristics for apple fields. J. Agric. Mech. Res. 2020, 42, 173–180. [Google Scholar] [CrossRef]
- OECD. Report on the State of the Knowledge—Literature Review on Unmanned Aerial Spray Systems in Agriculture; OECD Series on Pesticides, No. 105; OECD Publishing: Paris, France, 2021. [Google Scholar] [CrossRef]
- Ran, J.; Wu, C. Research status and prospect of cutting mechanism of grain harvester. J. Chin. Agric. Mech. 2019, 40, 25–34. [Google Scholar] [CrossRef]
- Xia, P.; Yin, S.; Chen, L.; Zhu, D.; Li, B. Numerical simulation of cutting pattern of a reciprocating cutter. Trans. CSAM 2007, 38, 65–68. [Google Scholar]
- Liu, Z.; Wang, D.; Zhai, G.; Liu, G.; Zhang, N.; Hao, X. Design and experiment on reciprocating double knife shrub harvester. Trans. CSAM 2013, 44, 102–106. [Google Scholar] [CrossRef]
- Zhang, S. Design and Test of Air-Aspirated Rapeseed Seeding System. Master’s Thesis, Huazhong Agricultural University, Wuhan, China, 2022. [Google Scholar]
- Feng, L.; Guan, T.; Tian, S.; Cui, B. Design of quick-return crank-rocker mechanism with optimum transmission performance. Mach. Des. Manuf. 2018, 66–69. [Google Scholar] [CrossRef]
- Miller, P.C.H.; Ellis, M.C.B.; Tuck, C.R. Entrained air and droplet velocities produced by agricultural flat-fan nozzles. At. Sprays 1996, 6, 693–707. [Google Scholar] [CrossRef]
- Ru, Y.; Zhu, C.; Bao, R. Spray drift model of droplets and analysis of influencing factors based on wind tunnel. Trans. CSAM 2014, 45, 66–72. [Google Scholar] [CrossRef]
- Wang, L. Research on Low-Attitude Droplets Deposition and Technology of Variable Spraying Measurement and Control System Based on Multi-Rotor Crop Protection UAV. Ph.D. Thesis, China Agricultural University, Beijing, China, 2017. [Google Scholar]
- Ren, Y.; Li, X. Assessment and validation of liquid breakup models for high-pressure dense diesel sprays. Front. Energy 2016, 10, 164–175. [Google Scholar] [CrossRef]
- Ma, Y.; Gong, C.W.; Zhang, Y.Z.; Li, B.; Wang, X.G. Effects of spray nozzles and spray adjuvant on the deposition of droplets of plant protection unmanned aerial vehicle (UAV) in paddy fields and the control efficacy against Asiatic rice borer Chilo suppressalis. J. Plant Prot. 2021, 48, 518–527. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, X.; Xu, S.; Yu, X.; Li, T.; Han, L.; Song, J. Research on the application of air induced nozzle in rice disease control by plant protection unmanned aerial vehicle. J. China Agric. Univ. 2022, 27, 195–203. [Google Scholar] [CrossRef]
- Dafsari, R.A.; Yu, S.; Yu, S.; Choi, Y.; Lee, J. Drift potential and coverage ratio analysis of an air induction nozzle under an agricultural drone with various operating condition: An indoor test. Comput. Electron. Agric. 2024, 224, 109171. [Google Scholar] [CrossRef]
- MH/T 1040-2011; Determination of the Spray Rate and Distribution Pattern of Aviation Spray Equipment. Civil Aviation Administration of China: Beijing, China, 2011. Available online: https://www.nssi.org.cn/nssi/front/78052310.html (accessed on 1 January 2020).
- ISO 24253-1: 2015; Crop protection Equipment—Spray Deposition Test for Field Crop—Part 1: Measurement in a Horizontal Plane. International Organisation for Standardization: Geneva, Switzerland, 2015. Available online: https://www.antpedia.com/standard/7927854-1.html (accessed on 15 March 2015).
- GB/T 43071-2023; Unmanned Aircraft Spray System for Plant Protection. Standardization Administration of China: Beijing, China, 2023. Available online: http://c.gb688.cn/bzgk/gb/showGb?type=online&hcno=DE5EB96756889201A2EBA08F003DB744 (accessed on 1 April 2024).
- ISO 16122-2; Agricultural and Forestry Machinery—Inspection of Sprayers in Use—Part 2: Horizontal Boom Sprayers, Volume 18. International Organisation for Standardization: Geneva, Switzerland, 2015.
- Hewitt, A. The importance of droplet size in agricultural spraying. At. Spray 1997, 7, 235–244. [Google Scholar] [CrossRef]
- Matthews, G.; Bateman, R.; Miller, P. Pesticide Application Methods, 4th ed.; Wiley & Blackwell: Hoboken, NJ, USA, 2014. [Google Scholar]
- Shouji, C.; Dafsari, R.A.; Yu, S.-H.; Choi, Y.; Lee, J. Mean and turbulent flow characteristics of downwash air flow generated by a single rotor blade in agricultural drones. Comput. Electron. Agric. 2021, 190, 106471. [Google Scholar] [CrossRef]
- Yang, F.; Xue, X.; Cai, C.; Sun, Z.; Zhou, Q. Numerical simulation and analysis on spray drift movement of multirotor plant protection unmanned aerial vehicle. Energies 2018, 11, 2399. [Google Scholar] [CrossRef]






| Surfaces of the Computational Domain | Boundary Conditions | Surface Conditions under DPM Model |
|---|---|---|
| Up | Velocity inlet (0 m·s−1) | Escape |
| Down | Wall | Trap |
| Others | Pressure outlet (0 MPa) | Escape |
| L/(mm) | θ/(°) | H/(m) |
|---|---|---|
| 40 | −30 | 1 |
| 90 | −15 | 1.25 |
| 140 | 0 | 1.5 |
| 190 | 15 | 1.75 |
| 240 | 30 | 2 |
| No. of Test | L/(mm) | θ/(°) | H/(m) | CV/(%) |
|---|---|---|---|---|
| 1 | 140 | 0 | 1.5 | 23.14 |
| 2 | 140 | 0 | 1.5 | 21.53 |
| 3 | 140 | 0 | 1.5 | 22.13 |
| 4 | 190 | −15 | 1.5 | 22.47 |
| 5 | 190 | 0 | 2 | 26.27 |
| 6 | 90 | 0 | 1 | 33.58 |
| 7 | 140 | 15 | 2 | 26.42 |
| 8 | 140 | 0 | 1.5 | 22.05 |
| 9 | 140 | 15 | 1 | 27.46 |
| 10 | 90 | 0 | 2 | 30.75 |
| 11 | 90 | 15 | 1.5 | 23.19 |
| 12 | 90 | −15 | 1.5 | 28.29 |
| 13 | 140 | −15 | 1 | 38.21 |
| 14 | 190 | 15 | 1.5 | 20.59 |
| 15 | 140 | −15 | 2 | 30.62 |
| 16 | 190 | 0 | 1 | 33.17 |
| 17 | 140 | 0 | 1.5 | 23.87 |
| Source | Sum of Squares | Df | Mean Square | F Value | p Value |
|---|---|---|---|---|---|
| Model | 401.07 | 9 | 44.56 | 23.62 | 0.0002 ** |
| L | 22.14 | 1 | 22.14 | 11.74 | 0.0110 * |
| θ | 60.12 | 1 | 60.12 | 31.86 | 0.0008 ** |
| H | 42.14 | 1 | 42.14 | 23.33 | 0.0021 ** |
| L∙θ | 2.59 | 1 | 2.59 | 1.37 | 0.2785 |
| L∙H | 4.14 | 1 | 4.14 | 2.20 | 0.1820 |
| θ∙H | 10.73 | 1 | 10.73 | 5.69 | 0.0486 * |
| L2 | 1.94 | 1 | 1.94 | 1.03 | 0.3448 |
| θ2 | 0.72 | 1 | 0.72 | 0.38 | 0.5568 |
| H2 | 250.97 | 1 | 250.97 | 133.03 | <0.0001 ** |
| Residual | 13.21 | 7 | 1.89 | ||
| Lack of Fit | 9.65 | 3 | 3.22 | 3.62 | 0.1231 |
| Cor Total | 414.28 | 16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Zhang, H.; Zhang, G.; Liu, H. Design and Test of Novel Uniform Application Equipment with Nozzles Swinging Horizontally Used for UAVs. Agronomy 2024, 14, 1631. https://doi.org/10.3390/agronomy14081631
Wang S, Zhang H, Zhang G, Liu H. Design and Test of Novel Uniform Application Equipment with Nozzles Swinging Horizontally Used for UAVs. Agronomy. 2024; 14(8):1631. https://doi.org/10.3390/agronomy14081631
Chicago/Turabian StyleWang, Shuangshuang, Han Zhang, Guozhong Zhang, and Haopeng Liu. 2024. "Design and Test of Novel Uniform Application Equipment with Nozzles Swinging Horizontally Used for UAVs" Agronomy 14, no. 8: 1631. https://doi.org/10.3390/agronomy14081631
APA StyleWang, S., Zhang, H., Zhang, G., & Liu, H. (2024). Design and Test of Novel Uniform Application Equipment with Nozzles Swinging Horizontally Used for UAVs. Agronomy, 14(8), 1631. https://doi.org/10.3390/agronomy14081631