
Recent Advances in Biomimetic Methods for Tillage Resistance Reduction in Agricultural Soil-Engaging Tools


Abstract
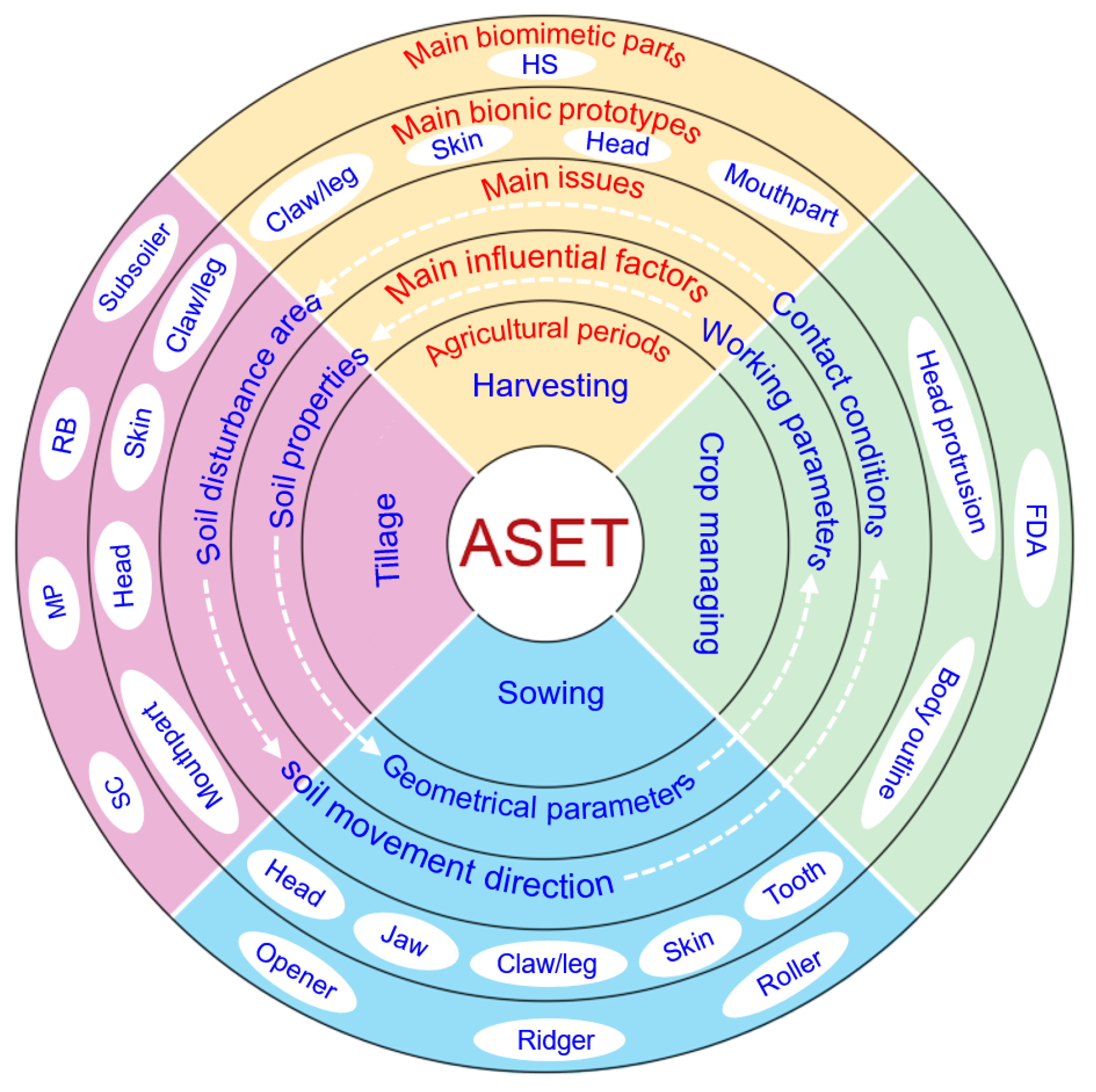
:1. Introduction
2. Overview of Agricultural Soil-Engaging Tools
3. Biomimetic Methods for Lower Resistance of ASETs
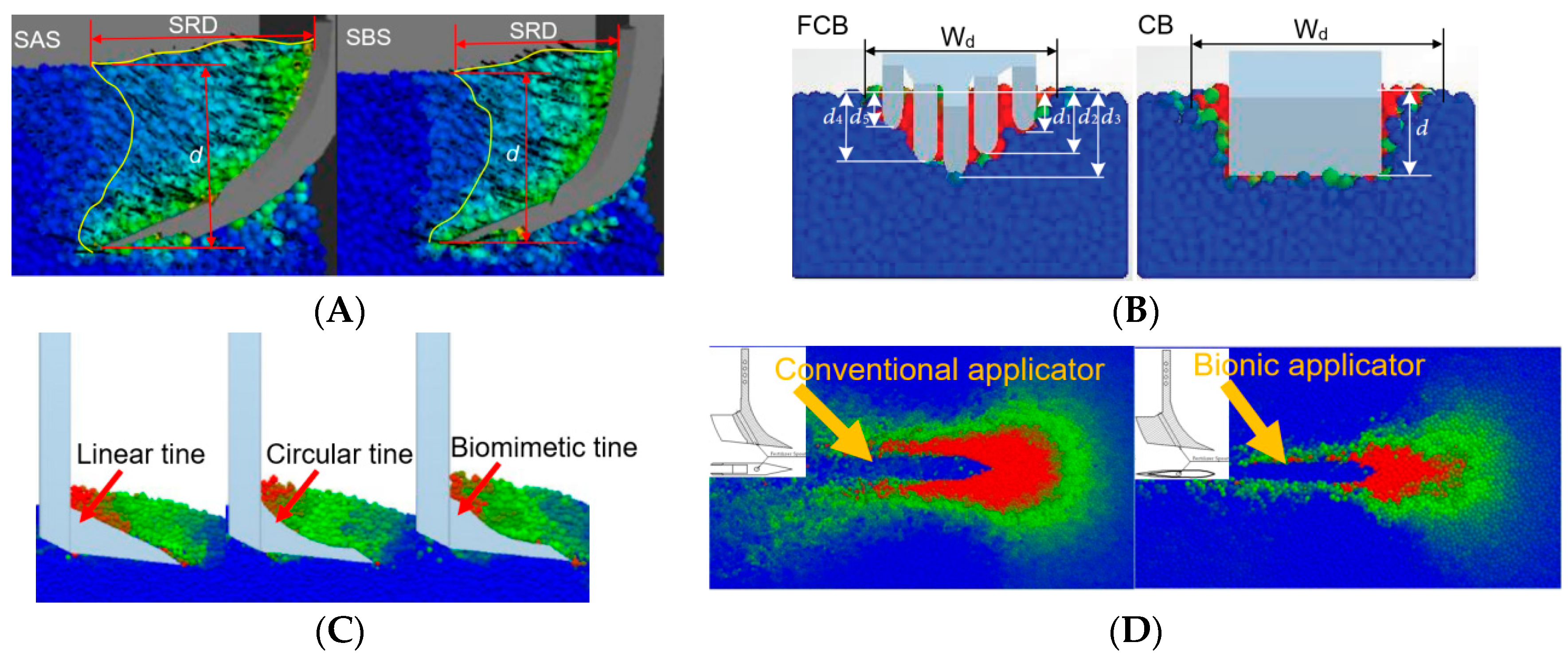
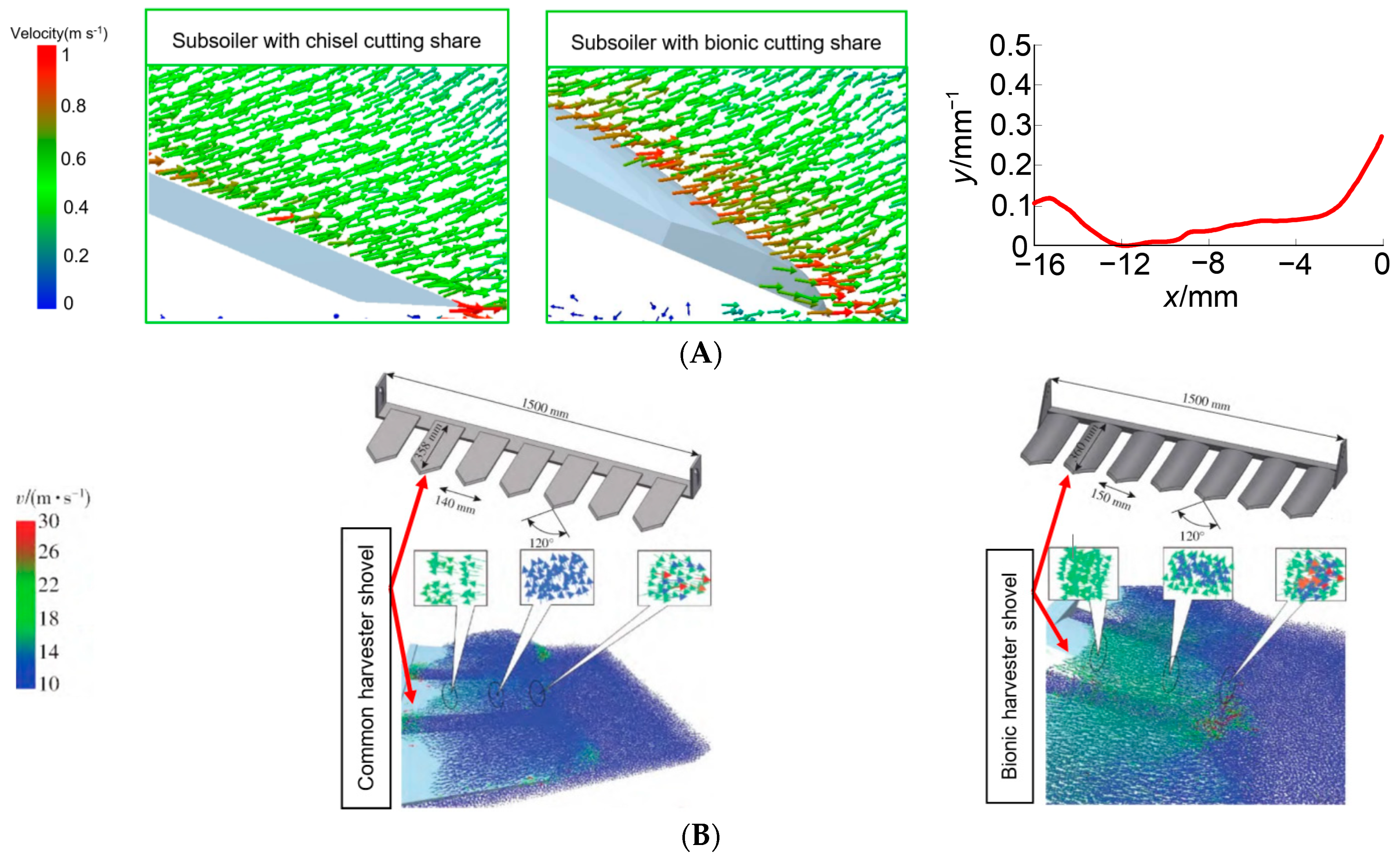
3.1. Reduction in Soil Disturbance Area
3.2. Movement Direction Optimization of Soil Particles
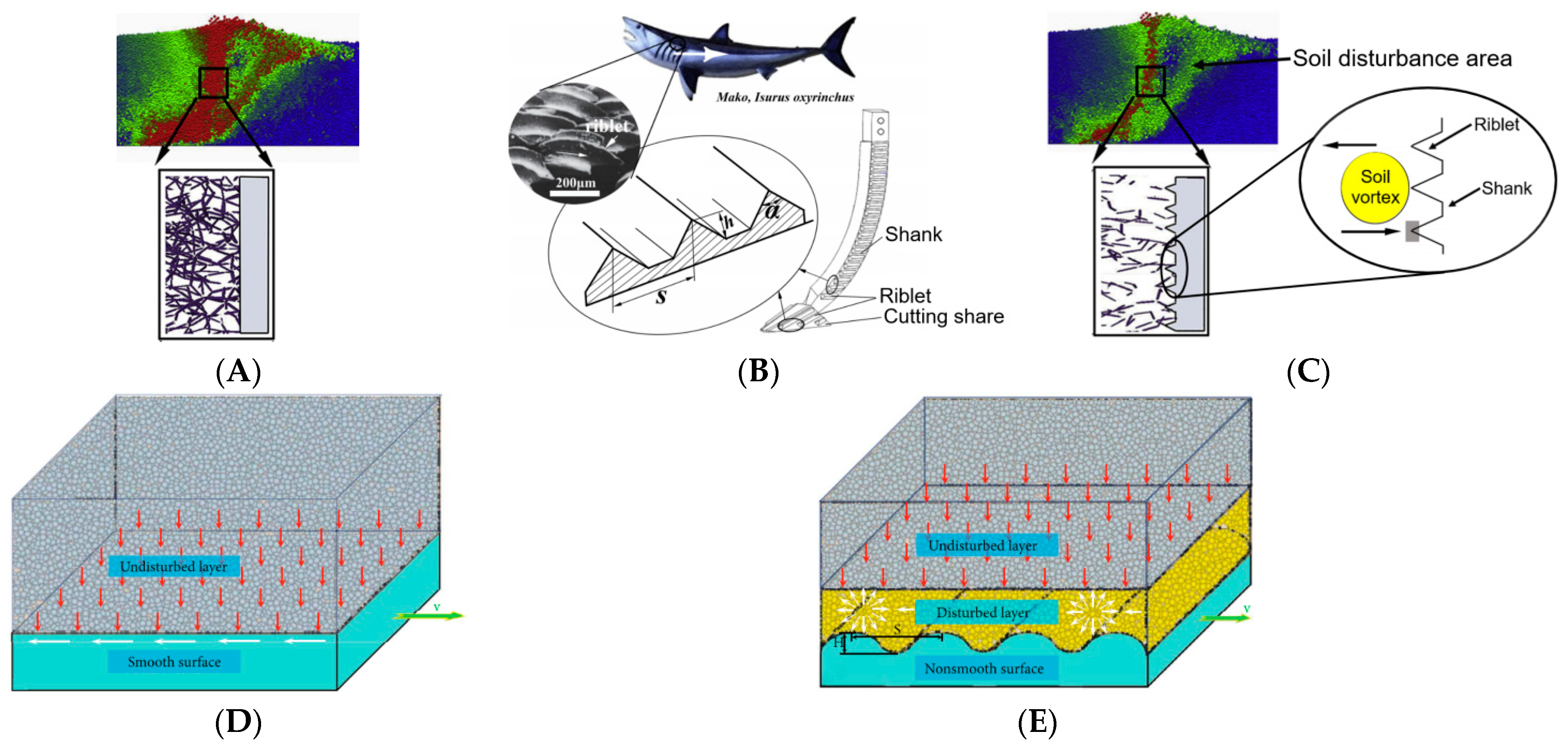
3.3. Improvement of Contact Status
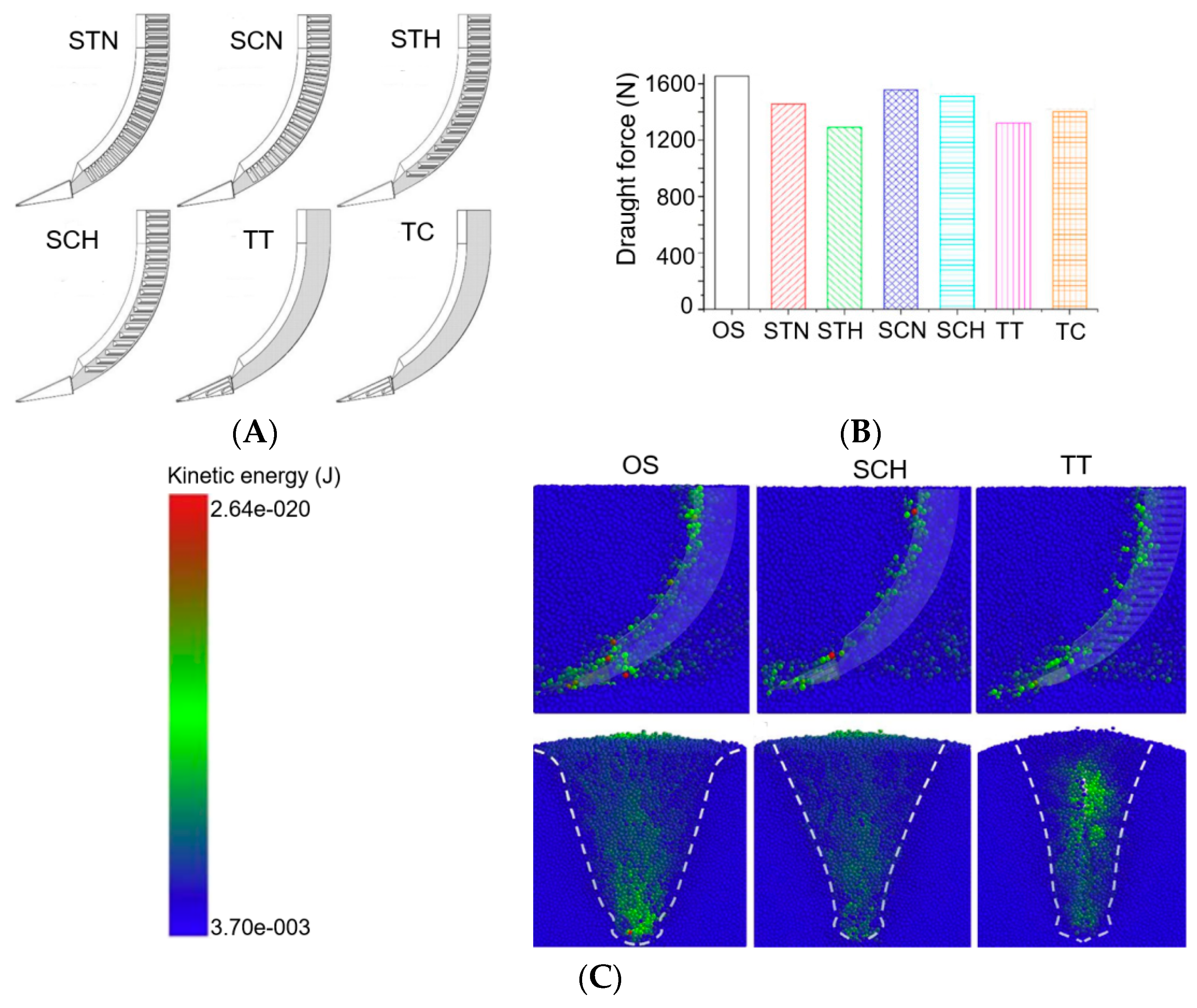
3.3.1. Adding Biomimetic Non-Smooth Structures
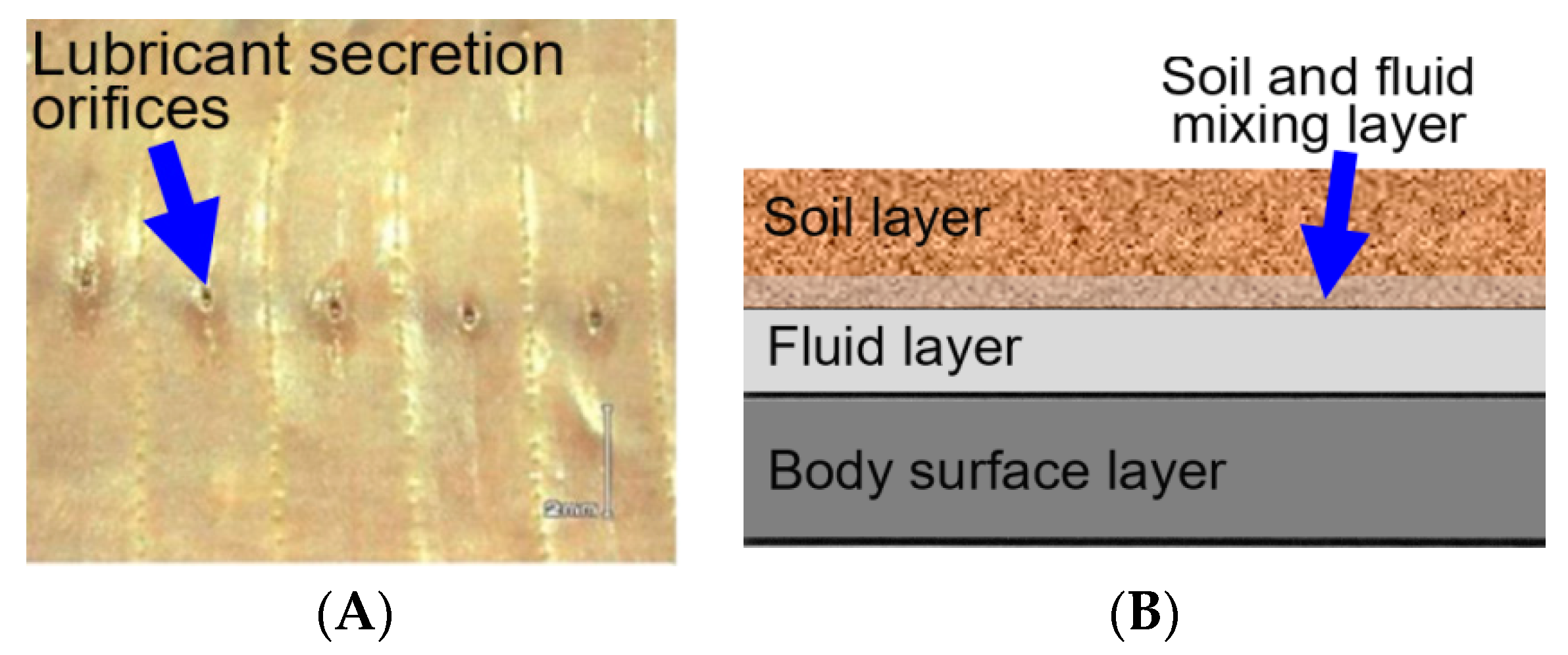
3.3.2. Adding Lubricant
3.4. Evaluation of Effects of Biomimetic Methods on Tillage Resistance Reduction
4. Conclusions and Suggestions for Future Research
4.1. Selection of Effective Biomimetic Factors in the Design of ASETs
4.2. Combination of Biomimetic Methods and Other Methods
4.3. Considering the Agronomic Requirements in the Biomimetic Design
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tilman, D.; Cassman, K.G.; Matson, P.A.; Naylor, R.; Polasky, S. Agricultural sustainability and intensive production practices. Nature 2002, 418, 671–677. [Google Scholar] [CrossRef] [PubMed]
- Sadek, M.A.; Chen, Y.; Zeng, Z.W. Draft force prediction for a high-speed disc implement using discrete element modelling. Biosyst. Eng. 2021, 202, 133–141. [Google Scholar] [CrossRef]
- Wang, X.Z.; Zhou, H.; Ji, J.T. Effect of mounting angle on bending subsoiling tool-soil interactions using DEM simulations. Agriculture 2022, 12, 1830. [Google Scholar] [CrossRef]
- Yang, Y.W.; Tong, J.; Ma, Y.H.; Jiang, X.H.; Li, J.G. Biomimetic rotary tillage blade design for reduced torque and energy requirement. Appl. Bionic Biomech. 2021, 2021, 8573897. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Tessier, S.; Irvine, B. Drill and crop performances as affected by different drill configurations for no-till seeding. Soil Till. Res. 2004, 77, 147–155. [Google Scholar] [CrossRef]
- Wang, J.W.; Wen, N.; Liu, Z.M.; Zhou, W.Q.; Tang, H.; Wang, Q.; Wang, J.F. Coupled bionic design of liquid fertilizer deep application type opener based on sturgeon streamline to enhance opening performance in cold soils of Northeast China. Agriculture 2022, 12, 615. [Google Scholar] [CrossRef]
- Walunj, A.; Chen, Y.; Tian, Y.Y.; Zeng, Z.W. Modeling soil–plant–machine dynamics using discrete element method: A review. Agronomy 2023, 13, 1260. [Google Scholar] [CrossRef]
- Gursoy, S.; Chen, Y.; Li, B. Measurement and modelling of soil displacement from sweeps with different cutting widths. Biosyst. Eng. 2017, 161, 1–13. [Google Scholar] [CrossRef]
- Odey, S.O.; Manuwa, S.I. Subsoiler development trend in the alleviation of soil compaction for sustainable agricultural production. Inter. J. Eng. Invent. 2018, 7, 29–38. [Google Scholar]
- Shahgoli, G.; Fielke, J.; Desbiolles, J.; Saunders, C. Optimising oscillation frequency in oscillatory tillage. Soil Till. Res. 2010, 106, 202–210. [Google Scholar] [CrossRef]
- Milkevych, V.; Munkholm, L.J.; Chen, Y.; Nyord, T. Modelling approach for soil displacement in tillage using discrete element method. Soil Till. Res. 2018, 183, 60–71. [Google Scholar] [CrossRef]
- Zeng, Z.W.; Chen, Y.; Zhang, X.R. Modelling the interaction of a deep tillage tool with heterogeneous soil. Comput. Electro. Agric. 2017, 143, 130–138. [Google Scholar] [CrossRef]
- Ahmadi, I. Effect of soil, machine, and working state parameters on the required draft force of a subsoiler using a theoretical draft-calculating model. Soil Till. Res. 2016, 55, 389–400. [Google Scholar] [CrossRef]
- Ucgul, M.; Saunders, C.; Li, P.L.; Lee, S.H.; Desbiolles, J.M.A. Analyzing the mixing performance of a rotary spader using digital image processing and discrete element modelling (DEM). Comput. Electron. Agric. 2018, 151, 1–10. [Google Scholar] [CrossRef]
- Chen, Y.; Cavers, C.; Tessier, S.; Monero, F.; Lobb, D. Short-term tillage effects on soil cone index and plant development in a poorly drained, heavy clay soil. Soil Till. Res. 2005, 82, 161–171. [Google Scholar] [CrossRef]
- Mahore, V.; Soni, P.; Paul, A.; Patidar, P.P.; Machavaram, R. Machine learning-based draft prediction for mouldboard ploughing in sandy clay loam soil. J. Terramech. 2024, 111, 31–40. [Google Scholar] [CrossRef]
- Zhang, Z.G.; Xue, H.T.; Wang, Y.C.; Xie, K.T.; Deng, Y.X. Design and experiment of panax notoginseng bionic excavating shovel based on EDEM. Trans. CSAM 2022, 53, 100–111. [Google Scholar] [CrossRef]
- Shahgoli, G.; Saunders, C.; Desbiolles, J.; Fielke, J. The effect of oscillation angle on the performance of oscillatory tillage. Soil Tillage Res. 2009, 104, 97–105. [Google Scholar] [CrossRef]
- Zhang, L.; Zhai, Y.; Chen, J.; Zhang, Z.; Huang, S. Optimization design and performance study of a subsoiler underlying the tea garden subsoiling mechanism based on bionics and EDEM. Soil Till. Res. 2022, 220, 105375. [Google Scholar] [CrossRef]
- Zhao, S.; Wang, J.; Chen, J.; Yang, Y.; Tan, H. Design and experiment of fitting curve subsoiler of conservation tillage. Trans. CSAM 2018, 49, 82–92. [Google Scholar] [CrossRef]
- Wang, Y.X.; Zhang, D.; Yang, L.; Cui, T.; Li, Y.H.; Liu, Y.W. Design and experiment of hydraulically self-excited vibration subsoiler. Trans. CSAE 2018, 34, 40–48. [Google Scholar] [CrossRef]
- Araya, K. Optimization of the design of subsoiling and pressurized fluid Injection equipment. J. Agric. Eng. Res. 1994, 57, 39–52. [Google Scholar] [CrossRef]
- Aikins, K.A.; Barr, J.B.; Antille, D.L.; Ucgul, M.; Jensen, T.A.; Desbiolles, J.M.A. Analysis of effects of bentleg opener geometry on performance in cohesive soi using the discrete element method. Biosyst. Eng. 2021, 209, 106–124. [Google Scholar] [CrossRef]
- Bandalan, E.P.; Salokhe, V.M.; Gupta, C.P.; Niyamapa, T. Performance of an oscillating subsoiler in breaking a hardpan. J. Terramech. 1999, 36, 117–125. [Google Scholar] [CrossRef]
- Wang, X.Z.; Gao, P.Y.; Yue, B.; Shen, H.; Fu, Z.L.; Zheng, Z.Q.; Zhu, R.X.; Huang, Y.X. Optimisation of installation parameters of subsoiler’ wing using the discrete element method. Comput. Electron. Agric. 2019, 162, 523–530. [Google Scholar] [CrossRef]
- Pu, X.; Li, G.J.; Huang, H.L. Preparation, anti-biofouling and drag-reduction properties of a biomimetic shark skin surface. Biol. Open 2016, 5, 389–396. [Google Scholar] [CrossRef]
- Li, B. Reduction Force and Tillage Performance of a Subsoiler Based on the Discrete Element Method (DEM). Ph.D. Thesis, Northwest A&F University, Xianyang, China, 2016. [Google Scholar]
- Wang, J.W.; Li, X.; Gao, P.; Na, M.; Wang, Q.; Zhou, W. Design and experiment of high efficiency drag reducing shovel for carrot combine harvester. Trans. CSAE 2020, 51, 93–103. [Google Scholar] [CrossRef]
- Wang, X.Z.; Du, R.Z.; Geng, L.X.; Zhou, H.; Ji, J.T. Performance evaluation of a cicada-inspired subsoiling tool using DEM simulations. Biomimetics 2024, 9, 25. [Google Scholar] [CrossRef]
- Ren, L.Q. Progress in bionic research on drag reduction of ground mechanical desorption. Chin. Sci. Tech. Sci. 2008, 38, 1353–1364. [Google Scholar]
- Sun, J.; Wang, Y.; Ma, Y.; Tong, J.; Zhang, Z. DEM simulation of bionic subsoilers (tillage depth > 40 cm) with drag reduction and lower soil disturbance characteristics. Adv. Eng. Softw. 2018, 119, 30–37. [Google Scholar] [CrossRef]
- Liu, J.B.; Tang, Z.H.; Zheng, X.; Meng, X.J.; Yang, H.J.; Zhang, L.Y. Design and experiments of the 2FHF-4.56 type base-fertilizer row-following and layered deep fertilizing machine for wide row spacing crops. Trans. CSAE 2022, 38, 1–11. [Google Scholar] [CrossRef]
- Odey, S.O.; Manuwa, S.I. Design steps of narrow tillage tools for draught reduction and increased soil disruption—A review. Agric. Eng. Int. CIGR J. 2016, 18, 91–102. [Google Scholar]
- Raper, R.L.; Schwab, E.B. Development of an in-row subsoiler attachment to reduce smearing. Appl. Eng. Agric. 2009, 25, 495–503. [Google Scholar] [CrossRef]
- Raper, R.L.; Reeves, D.W.; Burmester, C.H.; Schwab, E.B. Tillage depth, tillage timing, and cover crop effects on cotton yield, soil strength, and tillage energy requirements. Appl. Eng. Agric. 2000, 16, 379–385. [Google Scholar] [CrossRef]
- Barr, J.B.; Desbiolles, J.M.A.; Ucgul, M.; Fielke, J.M. Bentleg furrow opener performance analysis using the discrete element method. Biosyst. Eng. 2020, 189, 99–115. [Google Scholar] [CrossRef]
- Mangus, D.L.; Sharda, A.; Flippo, D.; Strasser, R.; Griffin, T. Development of high-speed camera hardware and software package to evaluate real-time electric seed meter accuracy of a variable rate planter. Comput. Electron. Agric. 2017, 142, 314–325. [Google Scholar] [CrossRef]
- Godwin, R.J. A review of the effect of implement geometry on soil failure and implement forces. Soil Till. Res. 2007, 97, 331–340. [Google Scholar] [CrossRef]
- Raper, R.L.; Bergtold, J.S. In-row subsoiling: A review and suggestions for reducin cost of this conservation tillage operation. Appl. Eng. Agric. 2007, 23, 463–471. [Google Scholar] [CrossRef]
- Askari, M.; Shahgholi, G.; Abbaspour-Gilandeh, Y.; Tash-Shamsabadi, H. The effect of new wings on subsoiler performance. Appl. Eng. Agric. 2016, 32, 353–362. [Google Scholar] [CrossRef]
- Ucgul, M.; Saunders, C.; Fielke, J.M. Discrete element modelling of top soil burial using a full scale Mouldboard plough under field conditions. Biosyst. Eng. 2017, 160, 140–153. [Google Scholar] [CrossRef]
- Gupta, C.P.; Visvanathan, R. Power requirement of a rotary tillage in saturated soil. Trans. ASAE 1993, 36, 1009–1012. [Google Scholar] [CrossRef]
- Zheng, K.; Mchugh, A.D.; Li, H.; Wang, Q.; He, J. Design and experiment of anti-vibrating and anti-wrapping rotary components for subsoiler cum rotary tiller. Int. J. Agric. Biol. Eng. 2019, 12, 47–55. [Google Scholar] [CrossRef]
- Babitsky, L.F.; Sobolevsky, I.V.; Kuklin, V.A. Bionic modelling of the working bodies of machines for surface tillage. IOP Conf. Ser. Earth Environ. Sci. 2020, 488, 012041. [Google Scholar] [CrossRef]
- Zhao, S.H.; Liu, H.J.; Tan, H.W.; Cao, X.Z.; Zhang, X.M.; Yang, Y.Q. Design and performance experiment of opener based on bionic sailfish head curve. Trans. CSAE 2017, 33, 32–39. [Google Scholar] [CrossRef]
- Li, J.Q.; Yan, Y.P.; Chirende, B.; Wu, X.J.; Wang, Z.L.; Zou, M. Bionic design for reducing adhesive resistance of the ridger inspired by a boar’s head. Appl. Bionic Biomech. 2017, 2017, 8315972. [Google Scholar] [CrossRef]
- Jia, H.L.; Wang, W.J.; Zhuang, J.; Luo, X.F.; Yao, P.F.; Li, Y. Design and experiment of profiling elastic press roller. Trans. CSAM 2015, 46, 28–34. [Google Scholar] [CrossRef]
- Tong, J.; Zhang, Q.Z.; Chen, D.H.; Chang, Y.; Wang, H.C. Effects of bionic geometric structure press rollers on reducing rolling resistance and adhesion against soil. Appl. Mech. Mater. 2014, 461, 63–72. [Google Scholar] [CrossRef]
- Zhang, X.R.; Chen, Y. Soil disturbance and cutting forces of four different sweeps for mechanical weeding. Soil Till. Res. 2017, 168, 167–175. [Google Scholar] [CrossRef]
- Bhushan, B. Biomimetics: Lessons from nature—An overview. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2009, 367, 1445–1486. [Google Scholar] [CrossRef]
- Wang, Y.; Xue, W.; Ma, Y.; Tong, J.; Liu, X.; Sun, J. DEM and soil bin study on a biomimetic disc furrow opener. Comput. Electron. Agric. 2019, 156, 209–216. [Google Scholar] [CrossRef]
- Zhao, J.L.; Lu, Y.; Guo, M.Z.; Fu, J.; Wang, Y.J. Design and experiment of bionic stubble breaking-deep loosening combined tillage machine. Int. J. Agric. Biol. Eng. 2021, 14, 123–134. [Google Scholar] [CrossRef]
- Song, Y.M.; Xie, Y.Z.; Malyarchuk, V.; Xiao, J.L.; Jung, I.; Choi, K.J.; Liu, Z.J.; Park, H.; Lu, C.F.; Kim, R.H.; et al. Digital cameras with designs inspired by the arthropod eye. Nature 2013, 497, 95–99. [Google Scholar] [CrossRef] [PubMed]
- Wu, B.; Zhang, R.; Hou, P.; Tong, J.; Zhou, D.; Yu, H.; Zhang, Q.; Zhang, J.; Xin, Y. Bionic nonsmooth drag reduction mathematical model construction and subsoiling verification. Appl. Bionic Biomech. 2021, 2021, 5113453. [Google Scholar] [CrossRef]
- Yang, Y.W.; Tong, J.; Ma, Y.H.; Li, M.; Jiang, X.H.; Li, J.G. Design and experiment of bionic soil-cutting blade based on multi-claw combination of mole rat. Trans. CSAM 2018, 49, 122–128. [Google Scholar] [CrossRef]
- Zhang, Z.H.; Gan, S.; Zuo, G.; Tong, J. Bionic design and performance experiment of sandfish head inspired subsoiler tine. Trans. CSAM 2021, 52, 33–42. [Google Scholar] [CrossRef]
- Yang, Y.; Li, M.; Tong, J.; Ma, Y. Study on the interaction between soil and the five-claw combination of a mole using the discrete element method. Appl. Bionics Biomech. 2018, 2018, 7854052. [Google Scholar] [CrossRef]
- Gong, H.; Wang, S. Bionic subsoiler structural design with the finite element analysis. Agric. Mech. Res. 2013, 7, 53–57. [Google Scholar]
- Guo, Z.; Tong, J.; Zhou, Z.; Ren, L. Review of subsoiling techniques and their applications. Trans. CSAE 2001, 17, 169–174. [Google Scholar]
- Guo, Z.J.; Zhou, Z.L.; Zhang, Y.; Li, Z.L. Study on bionic optimization design of soil tillage components. Sci. China 2009, 39, 720–728. [Google Scholar]
- Cao, X.Z. Design and Test of No-Till Seeding Opener on Discrete Element Method. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2016. [Google Scholar]
- Kou, B.X. Drag Reduction Characteristics of Coupling Surface Resembling Earthworm Lubrication Function. Master’s Thesis, Jilin University, Changchun, China, 2011. [Google Scholar]
- Liu, G.M.; Zou, M.; Li, J.Q. An experimental study on the bionic application of the earthworm body surface self-lubrication. Acta Agric. Univ. Jiangxiensis 2010, 32, 378–382. [Google Scholar]
- Massah, J.; Fard, M.R.; Aghel, H. An optimized bionic electro-osmotic soil-engaging implement for soil adhesion reduction. J. Terramechanics 2021, 95, 1–6. [Google Scholar] [CrossRef]
- Wang, Y.; Li, N.; Ma, Y.; Tong, J.; Pfleging, W.; Sun, J. Field experiments evaluating a biomimetic shark-inspired (BioS) subsoiler for tillage resistance reduction. Soil Till. Res. 2020, 196, 104432. [Google Scholar] [CrossRef]
- Liu, G.M. Coupling Bionic Research on the Adhesion and Resistance Reduction of the Earthworm Surface. Ph.D. Thesis, Jilin University, Changchun, China, 2009. [Google Scholar]
- Qiao, W.; Jiang, C. The mechanism and experimental research on reduction resistance by eletro-osmosis in slide. Trans. CSAM 1994, 4, 71–75. [Google Scholar]
- Larson, D.L.; Clyma, H.E. Electro-Osmosis Effectiveness in Reducing Tillage Draft Force and Energy Requirements. Trans. ASAE 1995, 38, 1281–1288. [Google Scholar] [CrossRef]
- Ma, W.P.; You, Y.; Wang, D.C.; Hu, J.N.; Huan, X.L.; Zhu, L. Design and experiment of low-resistance soil loosening shovel for cutting roots and reseeding in perennial alfalfa field. Trans. CSAM 2021, 52, 86–95. [Google Scholar] [CrossRef]
- Song, W.; Jiang, X.; Li, L.; Ren, L.; Tong, J. Increasing the width of disturbance of plough pan with bionic inspired subsoilers. Soil Till. Res. 2022, 220, 105356. [Google Scholar] [CrossRef]
- Yao, K.H.; Chen, W.; Yuan, D.; Chen, X.B.; Peng, Z.M.; Zhu, J.P. Bionic body optimized design and test analysis for shovel surface based on Workbench. J. Chin. Agric. Mech. 2015, 36, 9–14. [Google Scholar] [CrossRef]
- Guo, M.Z. Design and Key Technology Research of Stubble Breaking and Subsoiling Combined Machine Based on Dynamic Bionics. Ph.D. Thesis, Jilin University, Changchun, China, 2019. [Google Scholar]
- Bai, J.F.; Li, B.; Lv, X.T.; Chen, J.; Dang, G.R.; Shi, J.T. Structure design and test of the badger claws bionic subsoiler. Agric. Mech. Res. 2016, 4, 175–179. [Google Scholar]
- Wang, X.B. Design and Experimental Study of Biomimetic Deep Loose Shovel Based on Discrete Element Method. Master’s Thesis, Sichuan Agricultural University, Ya’an, China, 2023. [Google Scholar]
- Niu, J.P.; Luo, T.Y.; Xie, J.Q.; Cai, H.X.; Zhou, Z.K.; Chen, J.; Zhang, S. Simulation and experimental study on drag reduction and anti-adhesion of subsoiler with bionic surface. Int. J. Agric. Biol. Eng. 2022, 15, 57–64. [Google Scholar] [CrossRef]
- Deng, T.; Chang, Y.; Zhao, Y.S.; Cheng, C.Z.; An, C.J.; Zheng, X.Q. Mouldboard plough optimization research by bionic design of tool surface. J. Jilin Agric. Sci. Technol. Univ. 2018, 27, 22–25. [Google Scholar]
- Li, J.Q.; Ren, L.Q.; Liu, C.Z.; Chen, B.C. A study on the bionic plow moldboard of reducing soil shhesion and plowing resistance. Trans. CSAM 1996, 27, 1–4. [Google Scholar]
- Soni, P.; Salokhe, V.M.; Nakashima, H. Modification of a Mouldboard plough surface using arrays of polyethylene protuberances. J. Terramech. 2007, 44, 411–422. [Google Scholar] [CrossRef]
- Xiao, M.H.; Wang, K.X.; Yang, W.; Wang, W.C.; Jiang, F. Design and experiment of bionic rotary blade based on claw toe of gryllotalpa orientalis burmeister. Trans. CSAM 2021, 52, 55–63. [Google Scholar] [CrossRef]
- Tong, J.; Ji, W.F.; Jia, H.L.; Chen, D.H.; Yang, X.W. Design and tests of biomimetic blades for soil-rototilling and stubble-breaking. J. Bionic Eng. 2015, 12, 495–503. [Google Scholar] [CrossRef]
- Guo, J.; Zhang, Q.Y.; Muhammad, S.M.; Ji, C.Y.; Zhao, Z. Design and experiment of bionic mole’s toe arrangement serrated blade for soil-rototilling and straw-shattering. Trans. CSAE 2017, 33, 43–50. [Google Scholar] [CrossRef]
- Guan, C.S.; Fu, J.J.; Xu, L.; Jiang, X.Z.; Wang, S.L.; Cui, Z.C. Study on the reduction of soil adhesion and tillage resistance of bionic cutter teeth in secondary soil crushing. Biosyst. Eng. 2022, 213, 133–147. [Google Scholar] [CrossRef]
- Sun, J.F.; Chen, H.M.; Wang, Z.M.; Ou, Z.W.; Yang, Z.; Liu, Z.; Duan, J.L. Study on plowing performance of EDEM low-resistance animal bionic device based on red soil. Soil Till. Res. 2020, 196, 104336. [Google Scholar] [CrossRef]
- Zhao, S.H.; Gu, Z.; Yuan, Y.; Lv, J. Bionic design and experiment of potato curved surface sowing furrow opener. Trans. CSAM 2021, 52, 32–42. [Google Scholar] [CrossRef]
- Jia, H.L.; Meng, F.H.; Liu, L.J.; Shi, S.; Zhao, J.L.; Zhuang, J. Biomimetic design and experiment of core-share furrow opener. Trans. CSAM 2020, 51, 44–49. [Google Scholar] [CrossRef]
- Ma, Y.H.; Ma, S.S.; Jia, H.L.; Liu, Y.C.; Peng, J.; Gao, Z.H. Measurement and analysis on reducing adhesion and resistance of bionic ripple opene. Trans. CSAE 2014, 30, 36–41. [Google Scholar] [CrossRef]
- Tong, J.; Moayad, B.Z.; Ma, Y.H.; Sun, J.Y.; Chen, D.H.; Jia, H.L.; Ren, L.Q. Effects of biomimetic surface designs on furrow opener performance. J. Bionic Eng. 2009, 6, 280–289. [Google Scholar] [CrossRef]
- Zhang, Z.H.; Wang, X.Y.; Tong, J.; Stephen, C. Innovative design and performance evaluation of bionic imprinting toothed wheel. Appl. Bionics Biomech. 2018, 2018, 9806287. [Google Scholar] [CrossRef] [PubMed]
- Tong, J.; Zhang, Q.Z.; Chang, Y.; Chen, D.H.; Dong, W.H.; Zhang, L.L. Reduction of soil adhesion and traction resistance of ridged bionic press rollers. Trans. CSAM 2014, 45, 135–140. [Google Scholar] [CrossRef]
- Tong, J.; Zhang, Q.Z.; Chang, Y.; Li, M.; Zhang, L.L.; Liu, X. Finite element analysis and experimental verification of bionic press roller in reducing adhesion and resistance. Trans. CSAM 2014, 45, 85–92. [Google Scholar] [CrossRef]
- Zhou, W.Q.; Ni, X.; Wen, N.; An, T.; Wang, Y.J. Bionic design of liquid fertilizer deep application spray needle, based on badger claw-toe, for improving the operating performance of liquid fertilizer deep application in Northeast China. Processes 2023, 11, 756. [Google Scholar] [CrossRef]
- Liu, R.; Liu, Z.; Zhao, J.; Lu, Q.; Liu, L.; Li, Y. Optimization and experiment of a disturbance-assisted seed filling high-speed vacuum seed-metering device based on DEM-CFD. Agriculture 2022, 12, 1304. [Google Scholar] [CrossRef]
- Fan, Y.; Zhao, P.; Qiu, L.C.; Meng, T.T. Simulation analysis and experiment on performance of bionic potato digging shovel. Int. Agric. Eng. J. 2019, 28, 206–216. [Google Scholar]
- Huang, W.T. Research and Design of Vibration Bionic Shovel for Garlic Combine Harvester. Master’s Thesis, University of Jinan, Jinan, China, 2021. [Google Scholar]
- Li, J.W.; Jiang, X.H.; Ma, Y.H.; Tong, J.; Hu, B. Bionic design of a potato digging shovel with drag reduction based on the discrete element method (DEM) in clay soil. Appl. Sci. 2020, 10, 7096. [Google Scholar] [CrossRef]
- Tong, J.; Xu, S.; Chen, D.H.; Li, M. Design of a bionic blade for vegetable chopper. J. Bionic Eng. 2017, 14, 163–171. [Google Scholar] [CrossRef]
- Tian, K.P.; Li, X.W.; Shen, C.; Zhang, B.; Huang, J.C.; Wang, J.G.; Zhou, Y. Design and test of cutting blade of cannabis harvester based on longicorn bionic principle. Trans. CSAE 2017, 33, 56–61. [Google Scholar] [CrossRef]
- Ren, L.Q.; Liang, Y.H. Coupling Bionics, 1st ed.; Science Press: Beijing, China, 2012. [Google Scholar]
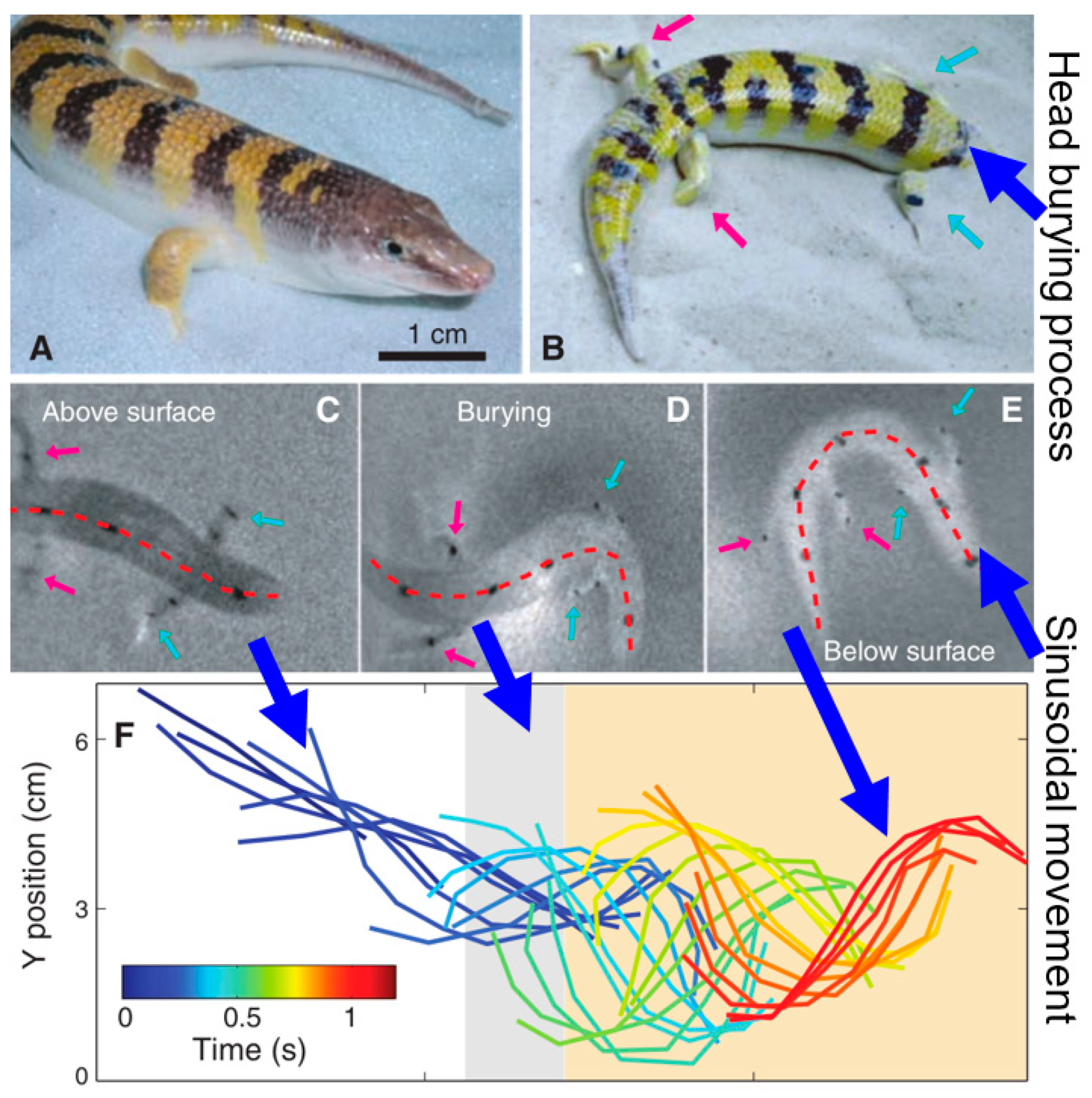
- Maladen, R.D.; Ding, Y.; Li, C.; Goldman, D.I. Undulatory swimming in sand: Subsurface locomotion of the sandfish lizard. Science 2009, 325, 314–317. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.Z.; Yue, B.; Gao, X.J.; Zheng, Z.Q.; Zhu, R.; Huang, Y. Discrete element simulations and experiments of disturbance behavior as affected by the mounting height of the subsoiler’s wing. Trans. CSAM 2018, 49, 129–141. [Google Scholar] [CrossRef]
- Wang, X.Z.; Li, P.; He, J.P.; Wei, W.Q.; Huang, Y.X. Discrete element simulations and experiments of soil-winged subsoiler interaction. Int. J. Agric. Biol. Eng. 2021, 14, 50–62. [Google Scholar] [CrossRef]
- Bai, J.F.; Li, B.; Lv, X.T.; Chen, J.; Shi, J.T. Study on vibration anti-drag of the badger claws bionic subsoiler. Agric. Mech. Res. 2016, 5, 224–227. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ASETs | Tool Structure | ASET Function | |
|---|---|---|---|
| Tillage tools | Subsoiling tool [39,40] | 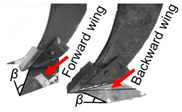 | Disrupt hardpans and remove soil compaction to encourage soil water infiltration, fertilizer absorption and utilization, and growth of crop roots. |
| Moldboard plough [41] | 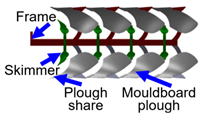 | (1) Provide soil inversion that helps to bury trash, weeds, and crop residue; (2) create the basis for a seedbed; (3) loosen and aerate soil. | |
| Rotary tool [4,14,42,43] |  | Complete the operations of soil mixing, turning, pulverizing, puddling, and leveling and, thereby, create good seedbeds for crop growing. | |
| Stubble cultivator [44] |  | Destroy weeds and loose soil without wrapping it when caring for fallows and preparing soil for sowing to create a moisture-protective layer with an optimal density. | |
| Sowing tools | Furrow opener [45] |  | Create a furrow to place seeds without disturbing excessive soil and mixing surface dry soil and deeper moist soil. |
| Ridger [46] |  | (1) Provide soil inversion; (2) loosen and aerate the soil; (3) increase the thickness of tillage layer soil and enhance crop root development. | |
| Press roller [47,48] |  | Break up large clods and eliminate large gaps between clods to reduce soil moisture evaporation and prevent fertilizer from flowing deep along gaps. | |
| Crop-managing tools | Fertilizer deep applicator [32] | 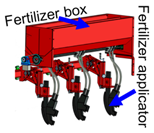 | Apply fertilizer to the depth near the crop root to improve the efficiency of fertilizer utilization and reduce the volatilization and environmental pollution of fertilizer. |
| Shovel for mechanical weeding [49] |  | As an environmentally friendly practice, mechanical weeding can kill weeds by modes of burying, cutting, and uprooting to keep weeds under control during the early growth stage of crops and increase the ability of crops to compete for fertilizer, water, and sunlight. | |
| Harvesting tools [17] | 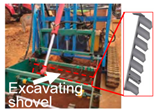 | Reduce the difficulty in harvesting crop roots and improve harvesting efficiency. | |
| BMP | SST | Prototype | Improvement of Tool Performance |
|---|---|---|---|
| Shank bioinspired by anteater claw [69] |  | 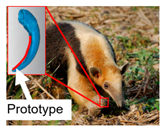 | Draught force (DF) was 7.64% lower than subsoiler with an arc-shaped shank (SAS). |
| Cutting share and shank bioinspired by mole’s forepaw [70] |  |  | DFs were 6.60–14.65% lower at working depth of 300–460 mm than standard subsoiler without biomimetic riblets (SSWB). |
| Shank bioinspired by mole cricket forefoot [19] |  | 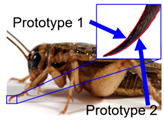 | DF and energy consumption were 16.3% and 9.6% lower than the SAS, respectively. |
| Shank bioinspired by pangolin claw [71] | 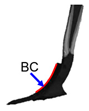 |  | DF was 11.11% lower than subsoiler with SAS. |
| Shank bioinspired by Oryctolagus cuniculus’ claw [72] |  |  | DFs were 6.4–7.5% lower than the SAS. |
| Shank bioinspired by badger claw [73] |  |  | DFs were 10.1–22.4% lower than the SAS (working speed: 0.6–0.8 m s−1). |
| Cutting share bioinspired by cicada head [29] | 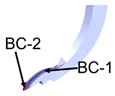 |  | DFs were 2.8–17.7% lower than the SAS (working depth: 250–350 mm; working speed: 0.5–2.5 ms−1). |
| Cutting share bioinspired by rice eel head [74] |  | 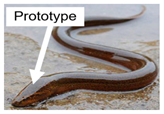 | DFs were 1.2–8.6% lower than the SAS. |
| Cutting share bioinspired by shark skin [75] |  |  | Draught and vertical forces were 21.3% and 24.8% lower than the SSWB. |
| BMP | TLT | Prototype | Improvement of Tool Performance | |
|---|---|---|---|---|
| Moldboard plough | Moldboard plough with dung-beetle-skin-inspired bulge [76,77,78] | 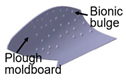 |  | Draught forces (DF) were 2–36% lower than moldboard plough without bionic bulge. |
| Stubble cultivator | Stubble cultivator with wings bioinspired by beetle’s digging leg curve and angle of back support foot [44] |  |  | DFs were 12.46–18.99% lower than conventional stubble cultivator. |
| Rotary tillage tools | Mole-cricket-toe-inspired rotary blade [79] |  | 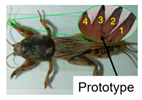 | Mean torque values (TVs) were 3.49–10.53% lower than the conventional rotary blade. |
| Mole-rat-toe-inspired rotary blade [80] | 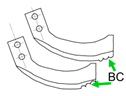 | 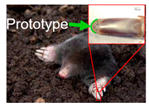 | TVs of rotary blade were 0.63–6.97% lower at various rotary speeds (180–460 r min−1) than the universal blade (UB). | |
| Arrangement of mole-rat-claw-inspired rotary blade [81] |  |  | TV and power consumption (PC) were 1.23% and 3.07% lower, respectively, than the national rotary blade. | |
| Mole-rat-claw-inspired rotary blade [4] |  | 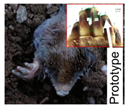 | TVs of rotary blade were 16.88–21.80% lower at various rotary (254–267 r min−1) and forward speeds (1–5 km h−1) and tillage depths (80–160 mm) than UB. | |
| Locust-mouthparts-inspired rotary disc [52] |  | 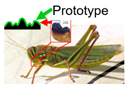 | TVs were 31.25–33.33% lower than the conventional rotary discs. | |
| Badger-claw-inspired rotary blade [82] |  |  | PC was 2.95–30.26% lower than the conventional rotary blade. | |
| Brown-bear-claw-inspired rotary blade [83] |  |  | PC was 34.9% lower than the conventional rotary blade. | |
| BMP | SCMT | Prototype | Improvement of Tool Performance | |
|---|---|---|---|---|
| Sowing tools | Sailfish-head-inspired opener [45] |  |  | Draught forces (DFs) were 5.0% lower than the conventional opener (CO). |
| Yellowfin-tuna-jaw-inspired potato opener [84] |  |  | DFs were 9.0% lower than the CO. | |
| Badger-tooth-inspired opener [85] |  |  | DFs were 8.04–8.71% lower at speeds of 3.6–7.2 km h−1 than the CO. | |
| Contracted earthworm-head-structure-inspired opener [86] |  |  | DFs were 18.30–33.40% lower than the COs. | |
| Dung-beetle-head-skin-inspired furrow opener [87] | 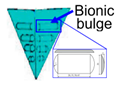 |  | DFs were 13.90–36.70% lower than COs without bulges. | |
| Boar-head-inspired ridger [46] |  |  | DFs were 7.46–16.67% lower than the conventional ridger. | |
| Toothed roller with dung-beetle-end-tooth-inspired tooth [88] |  |  | DFs were 9.50–16.50% lower than the conventional toothed roller. | |
| Press roller with dung-beetle-head-inspired bulges [48,89,90] | 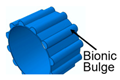 | 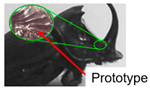 | DFs were 11.75–41.08% lower than the conventional press roller. | |
| Crop-managing tools | Sturgeon-body-structure-inspired liquid fertilizer deep applicator [6] |  |  | DFs were 7.20–21.30% lower than the conventional fertilizer deep applicator. |
| Liquid fertilizer deep applicator bioinspired by badger claw [91] |  |  | Power consumption was 9.52~40.50% lower than the conventional applicator. | |
| Fertilizer applicator with biomimetic shank bioinspired by protrusion structure of dung beetle [92] | 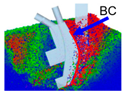 |  | DFs were 42.60% lower than the conventional fertilizer applicator. | |
| BMP | Harvesting Tool | Prototype | Improvement of Tool Performance |
|---|---|---|---|
| Harvester shovel’s tine bioinspired by badger claw [28] |  |  | Draught forces (DFs) were 5.79% lower than the conventional chisel tine. |
| Harvester shovel bioinspired by pig head [17,93] |  |  | Digging resistance was 19.15–24.29% lower than the plane harvester shovel. |
| Mole-cricket-head-inspired harvester shovel [94] |  |  | DFs were 40.1% lower than the chisel tine. |
| Pangolin-skin-inspired potato digging shovel [95] |  |  | DFs were 24.03% lower than the shovel without bionic bulge. |
| Bamboo-weevil-larva-mandible-inspired blade for vegetable chopper [96] |  |  | Energy consumption was 12.8% lower than the conventional blade. |
| Biomimetic cutting blade of cannabis harvester bioinspired by mouthparts palate of batocera horsfieldi [97] |  |  | Average maximum cutting force and fuel consumption were 7.4% and 8.0%, respectively, lower than the ordinary blade. |
| ASETs | TFRR for Various ASETs under Different Soil Types (%) | |||
|---|---|---|---|---|
| Less Viscous Soil | Viscous Soil | Mean | ||
| Tillage tools | Subsoiling tool | 10.17 ± 8.72 | 13.67 ± 9.23 | 11.00 ± 8.97 |
| Moldboard plough | - | 14.61 ± 5.20 | 14.61 ± 5.20 | |
| Rotary tillage tool | 10.13 ± 9.20 | 16.29 ± 13.40 | 11.98 ± 11.01 | |
| Stubble cultivator | - | 16.61 ± 2.95 | 16.61 ± 2.95 | |
| Sowing tools | Opener | 7.00 ± 2.00 | 17.27 ± 9.83 | 15.80 ± 9.81 |
| Ridger | - | 11.29 ± 3.92 | 11.29 ± 3.92 | |
| Roller | - | 20.87 ± 10.70 | 20.87 ± 10.70 | |
| Crop-managing tools | Fertilizer deep applicator | 30.87 ± 15.12 | 13.90 ± 5.80 | 21.17 ± 13.70 |
| Harvesting tools | Harvester shovel | 22.33 ± 12.28 | 22.74 ± 4.59 | 22.56 ± 8.88 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Zhang, S.; Du, R.; Zhou, H.; Ji, J. Recent Advances in Biomimetic Methods for Tillage Resistance Reduction in Agricultural Soil-Engaging Tools. Agronomy 2024, 14, 2163. https://doi.org/10.3390/agronomy14092163
Wang X, Zhang S, Du R, Zhou H, Ji J. Recent Advances in Biomimetic Methods for Tillage Resistance Reduction in Agricultural Soil-Engaging Tools. Agronomy. 2024; 14(9):2163. https://doi.org/10.3390/agronomy14092163
Chicago/Turabian StyleWang, Xuezhen, Shihao Zhang, Ruizhi Du, Hanmi Zhou, and Jiangtao Ji. 2024. "Recent Advances in Biomimetic Methods for Tillage Resistance Reduction in Agricultural Soil-Engaging Tools" Agronomy 14, no. 9: 2163. https://doi.org/10.3390/agronomy14092163