
Design and Experimental Research on Staggered Straw Cleaning Device for No-Till Seeding in Drip Irrigation Area

Abstract
:1. Introduction
2. Materials and Methods
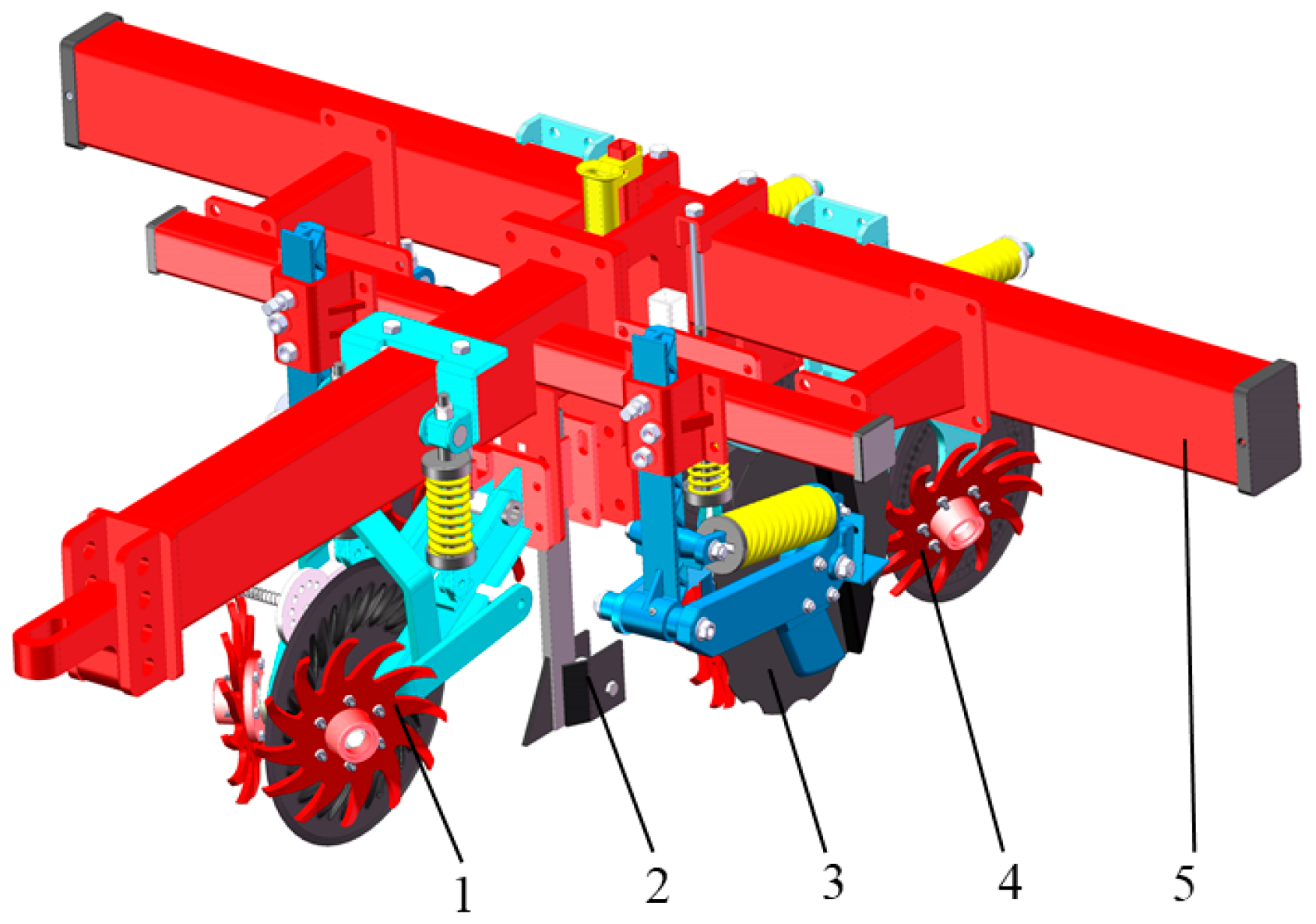
2.1. Overall Structure of Staggered Straw Cleaning Device
2.2. Parameter Design of the Staggered Tine Discs Group Cleaning Device
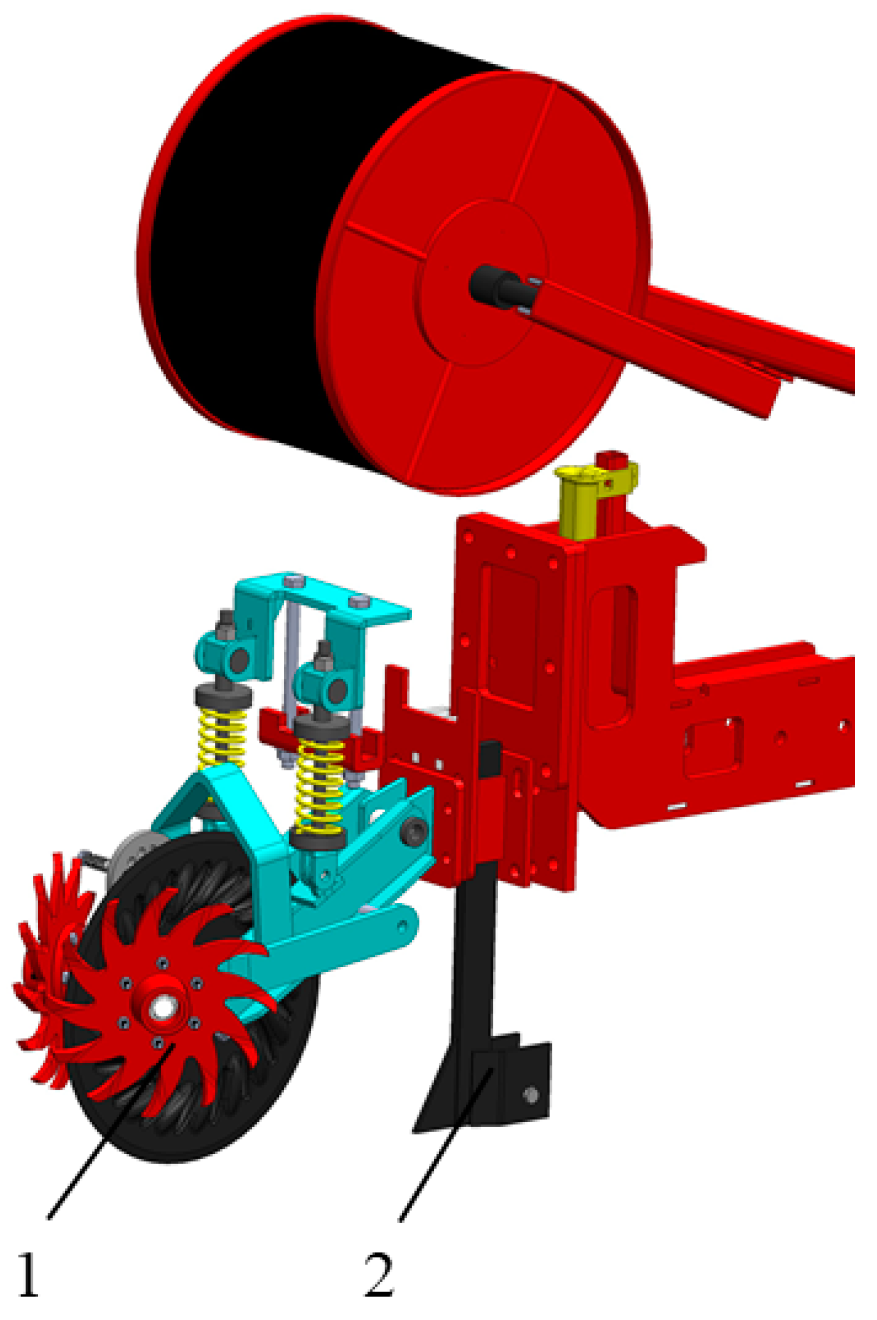
2.2.1. The Front Tine Discs Group
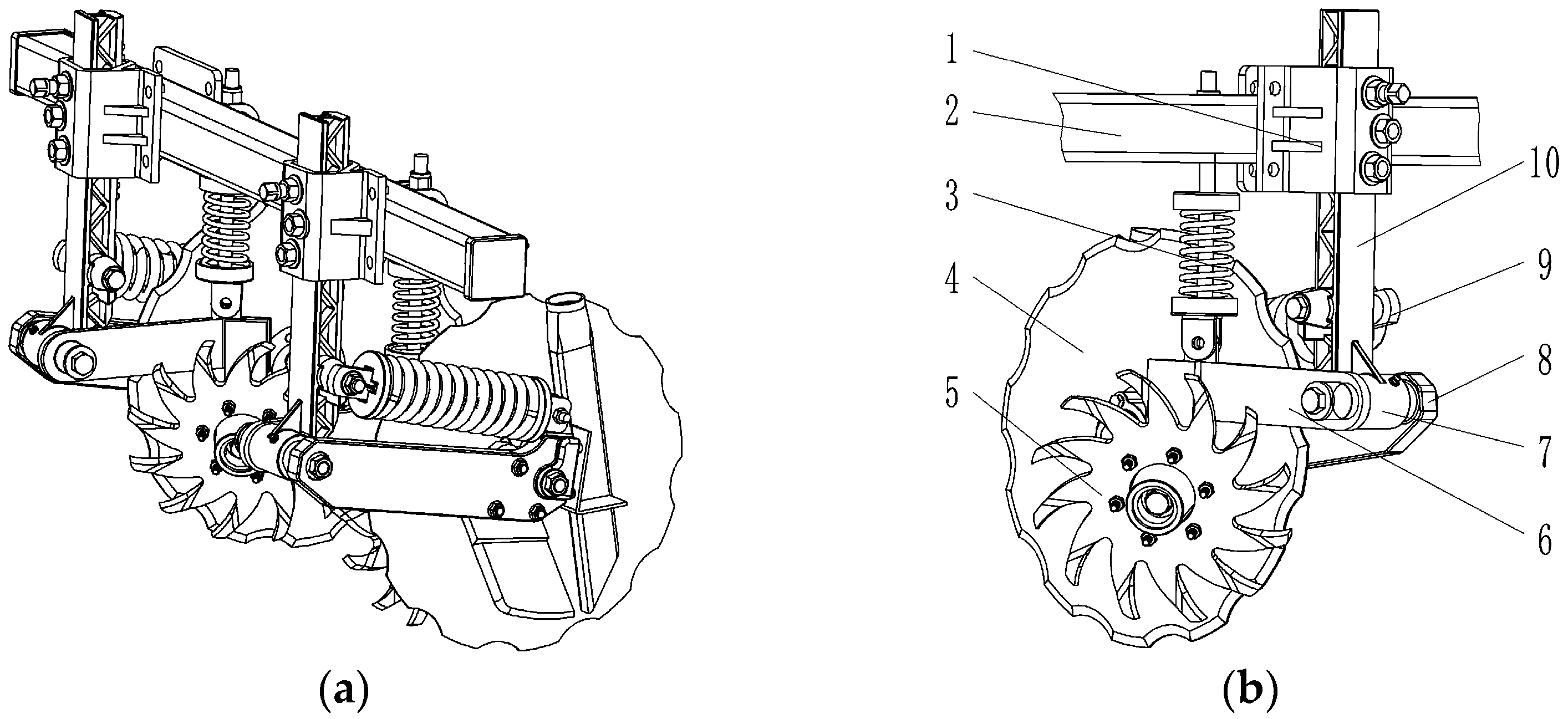
2.2.2. The Middle Tine Discs Group
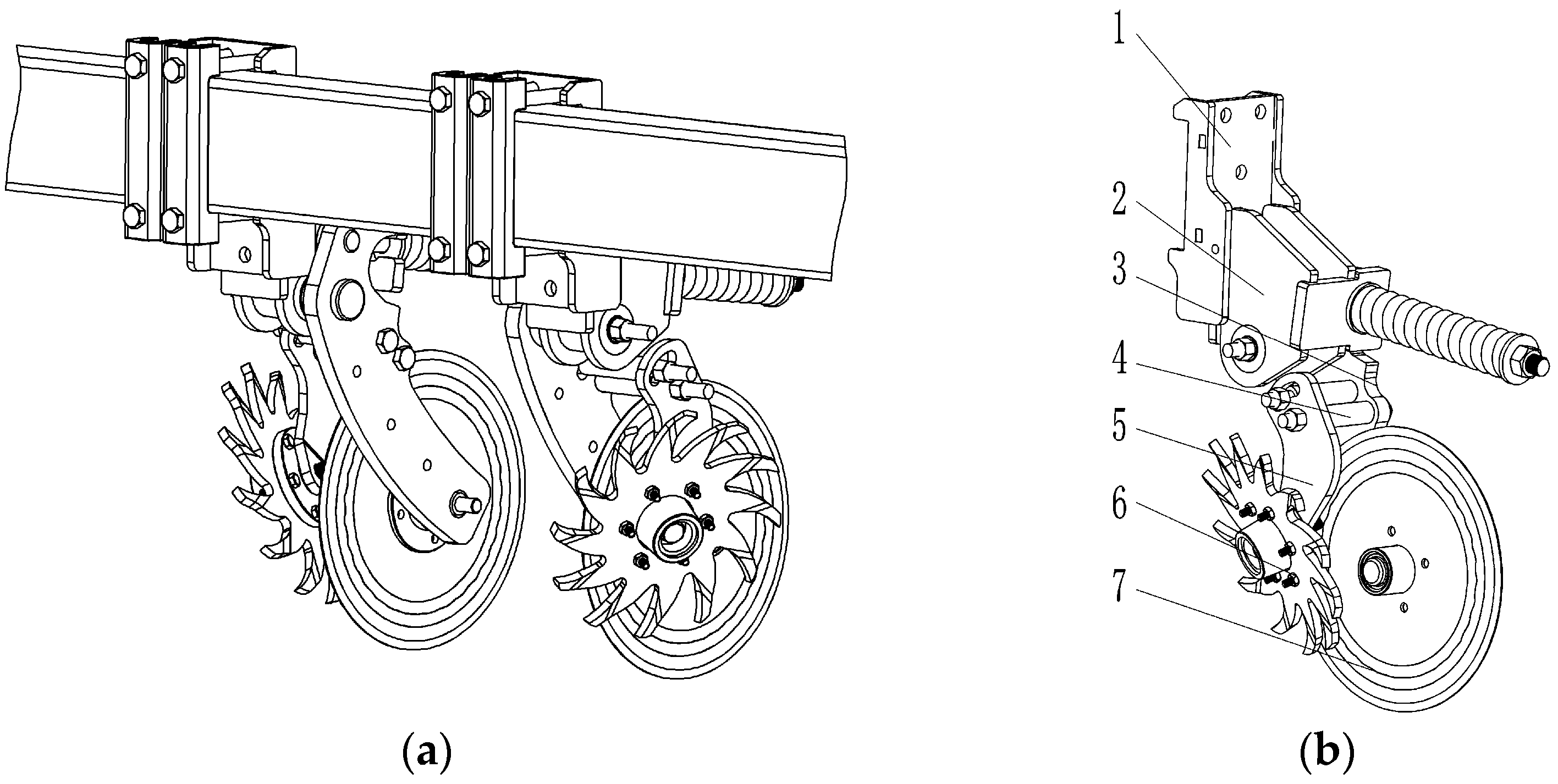
2.2.3. The Rear Tine Discs Group
2.3. Design of Tine Disc
2.3.1. The Radius of Tine Disc
2.3.2. Number of Teeth
2.3.3. Rotation Time
2.3.4. Theoretical Width of Tine Disc
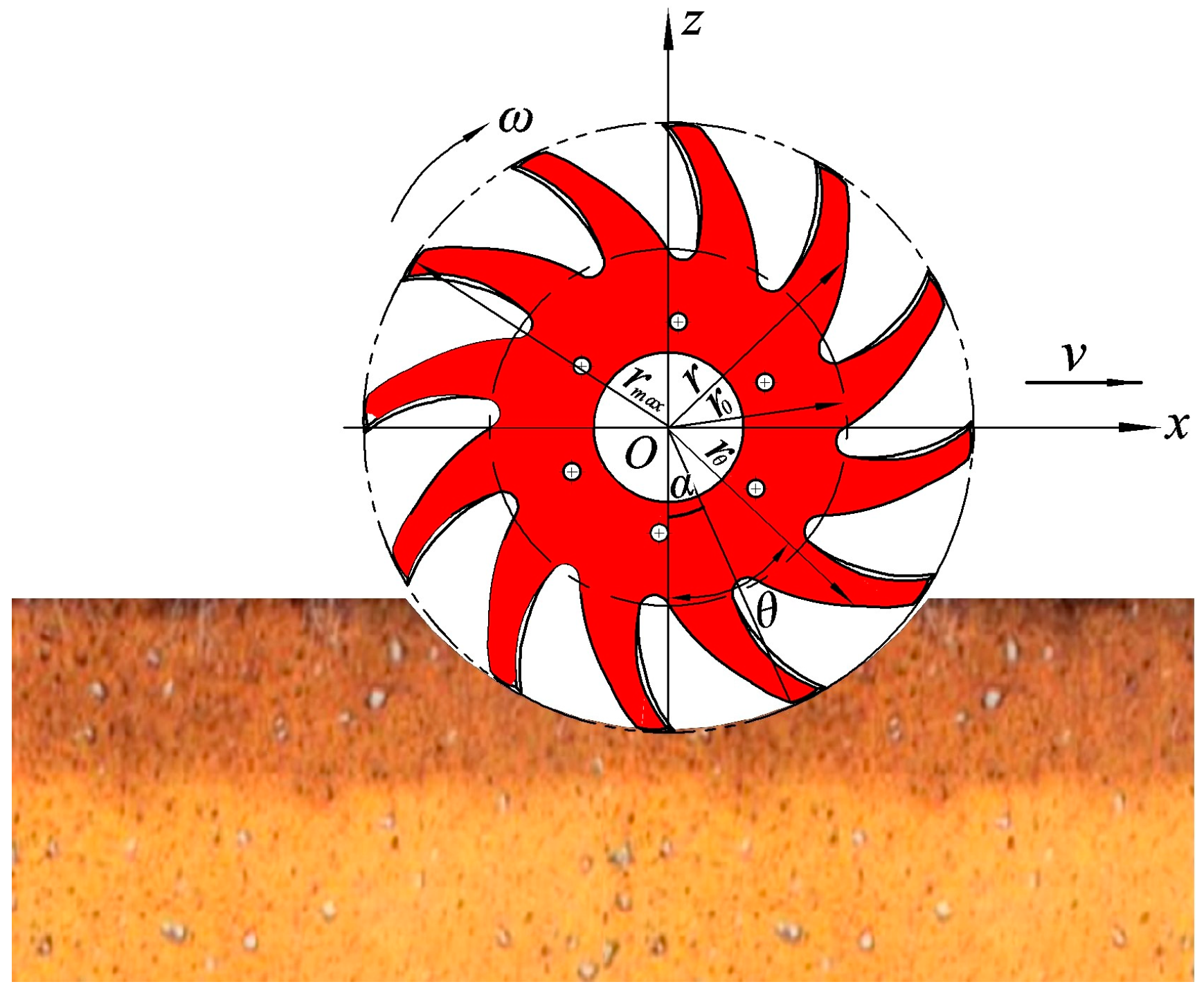
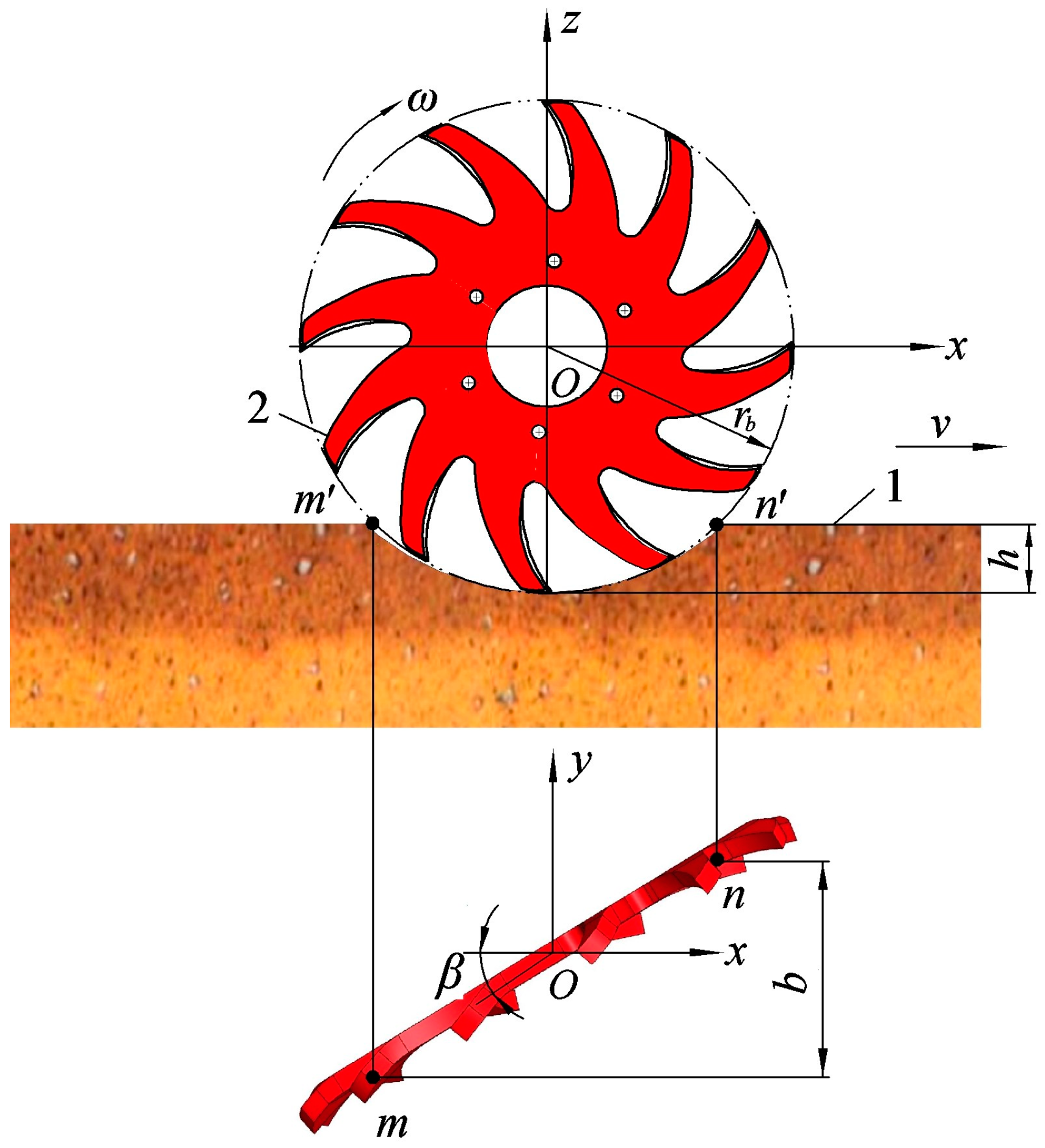
2.3.5. Kinematic Analysis of Tine Disc
2.4. DEM Simulation
2.4.1. The Interaction Model of Staggered Tine Discs Group–Straw–Soil
2.4.2. Test Design and Index Measurement
2.5. Field Experiment
3. Results and Discussion
3.1. Data Analysis of EDEM Simulation Test
3.1.1. Establishment of Regression Model and Significance Analysis
- Straw cleaning rate
- 2.
- The mass of straw returned in the drip irrigation coverage area
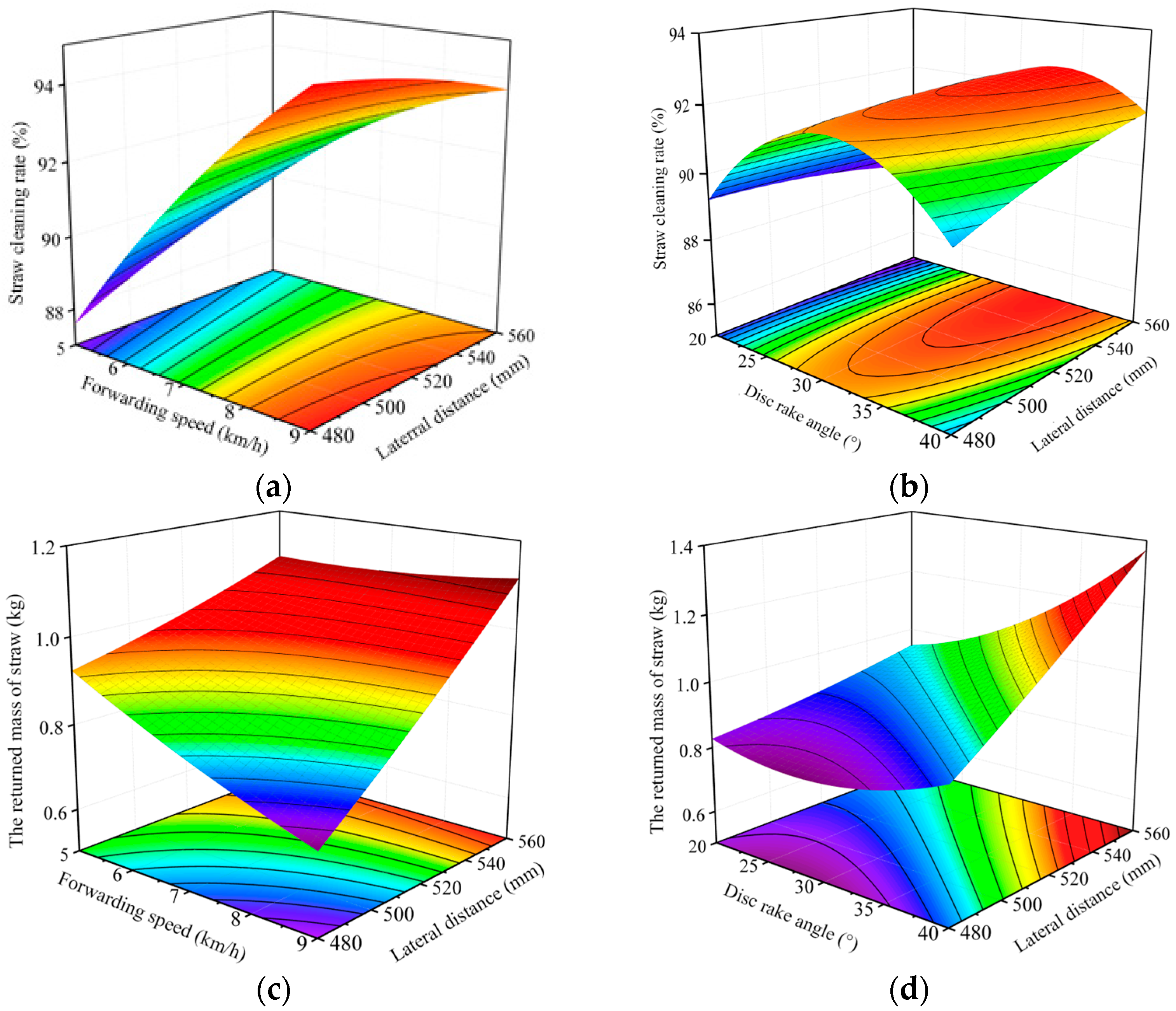
3.1.2. Analysis of the Influence of the Indexes on the Straw Cleaning and the Mass of Straw Returned in the Drip Irrigation Coverage Area
3.1.3. Parameter Optimization and Verification of Desirability
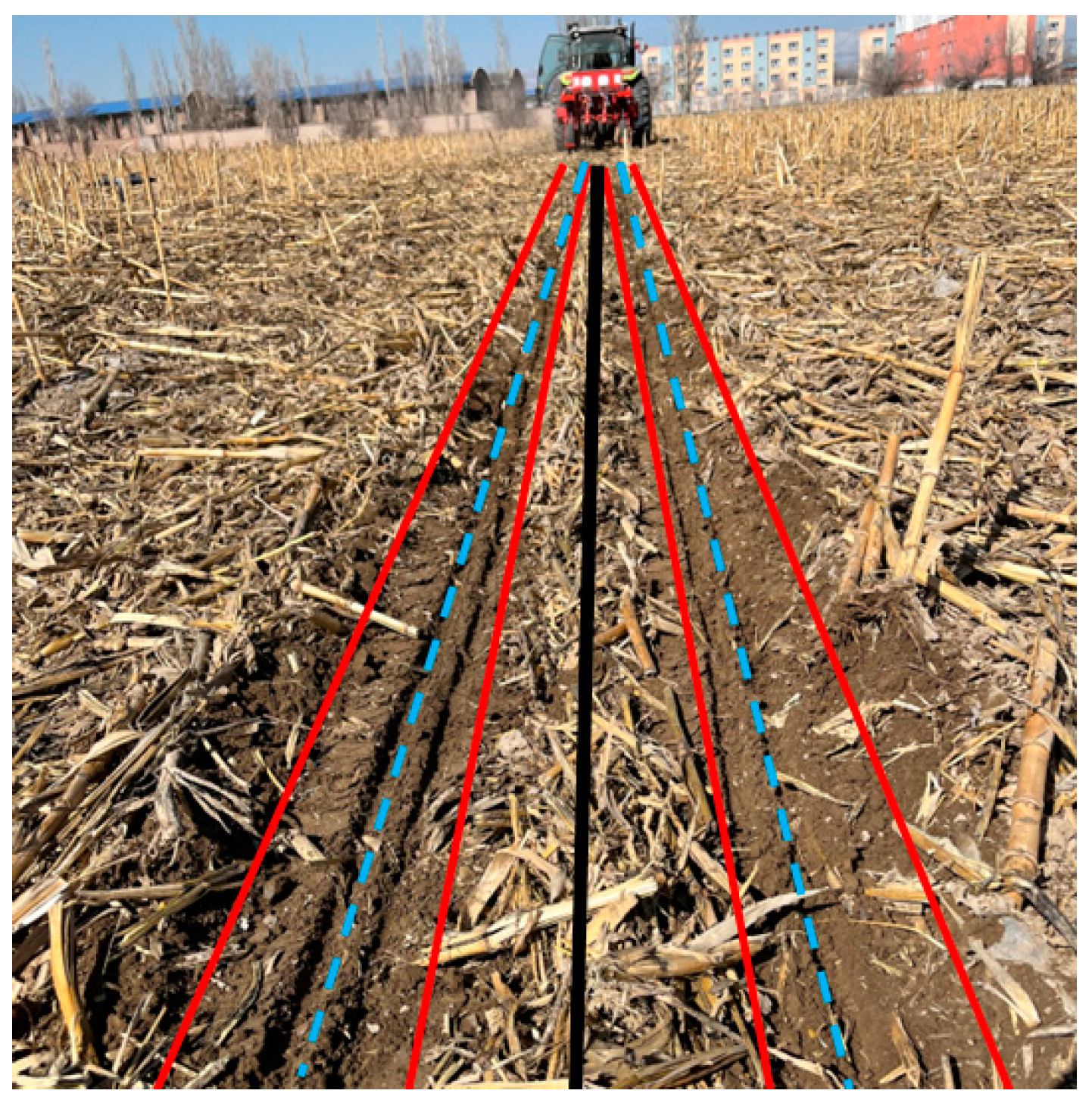
3.2. Field Experimental Results
3.3. Discussion
4. Conclusions
- (1)
- A method and overall plan for cleaning surface straw for drip irrigation and no-tillage corn sowing were proposed, which adopted staggered tine discs group cleaning technology. The front tine discs group, drip irrigation belt laying mechanism, and middle and rear tine discs group were designed, and the basic structures and parameters were determined. The motion trajectory of the working end point of the tine disc teeth and the process of straw throwing were analyzed, and the motion trajectory equation of the maize straw in a parabola after it was thrown out of the disc teeth was obtained. The maximum distance of straw thrown backward horizontally ranges from 246.4 mm to 682.7 mm, the maximum distance of straw thrown sideways horizontally ranges from 142.2 to 393.9 mm, and the maximum height of straw thrown in the vertical direction ranges from 71.1 to 197.1 mm.
- (2)
- The optimal solutions of the cleaning rate and the mass of straw returned in the drip irrigation coverage area were obtained. The forwarding speed was 9 km/h, the disc rake angle was 33.7°, and the lateral distance of the middle tine discs was 529 mm.
- (3)
- The field test verification results showed that the straw cleaning was 89.13%, the straw cleaning width of the seed strip was 527.2 mm, and the straw coverage rate of the drip irrigation area was 80.74%.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Si, J.; Wang, L.; Zhang, K.; Li, L.; Fudjoe, S.K.; Luo, Z. Irrigation as an Effective Way to Increase Potato Yields in Northern China: A Meta-Analysis. Agronomy 2024, 14, 448. [Google Scholar] [CrossRef]
- Yuan, P.; Li, H.; Jiang, G.; He, J.; Lu, C.; Huang, S. Design and Experiment of Straw Cleaning Device for Wide-narrow Maize No-tillage Sowing Strip in a Drip Irrigation Area. Trans. Chin. Soc. Agric. Mach. 2021, 52, 43–52. [Google Scholar]
- Phefadu, K.C.; Munjonji, L. Assessing the Impact of No-Tillage Duration on Soil Aggregate Size Distribution, Stability and Aggregate Associated Organic Carbon. Agronomy 2024, 14, 2482. [Google Scholar] [CrossRef]
- He, J.; Li, H.; Chen, H.; Lu, C.; Wang, Q. Research progress of conservation tillage technology and machine. Trans. Chin. Soc. Agric. Mach. 2018, 49, 1–19. [Google Scholar]
- Yuan, P.; Li, H.; Lu, C.; Wang, Q.; He, J.; Huang, S.; Cui, D. Design and experiment of seed furrow cleaning device based on throwing and sliding for no-till maize seeding. Int. J. Agric. Biol. Eng. 2022, 15, 95–102. [Google Scholar] [CrossRef]
- Arvidsson, J.; Hillerström, O. Specific draught, soil fragmentation and straw incorporation for different tine and share types. Soil Tillage Res. 2010, 110, 154–160. [Google Scholar] [CrossRef]
- Zeng, Z.; Chen, Y. Simulation of straw movement by discrete element modelling of straw-sweep-soil interaction. Biosyst. Eng. 2019, 180, 25–35. [Google Scholar] [CrossRef]
- Wang, Q.; Cao, X.; Wang, C.; Li, H.; He, J.; Lu, C. Research Progress of No/Minimum Tillage Corn Seeding Technology and Machine in Northeast Black Land of China. Trans. Chin. Soc. Agric. Mach. 2021, 52, 1–15. [Google Scholar]
- Sharma, V.K. Development and Performance Evaluation of a Multi-Toolbar No-Till Seed Drill for Surface Managed Loose Straw Conditions After Combining. Ph.D. Thesis, GB Pant University of Agriculture and Technology, Pantnagar, India, 2014. [Google Scholar]
- Kumar, N.; Sawant, C.; Sharma, R.; Chhokar, R.; Tiwari, P.; Singh, D.; Roul, A.; Tripathi, S.; Gill, S.; Singh, G. Combined effect of disc coulters and operational speeds on soil disturbance and crop residue cutting under no-tillage system in soil bin. J. Sci. Ind. Res. 2021, 80, 739–749. [Google Scholar] [CrossRef]
- Hegazy, R.; Dhaliwal, I. Evaluation of a Power Driven Residue Manager for No-till Drills. Asian J. Agric. Res. 2011, 5, 127–136. [Google Scholar] [CrossRef]
- Huang, Y.; Gao, P.; Zhang, Q.; Shen, H.; Zhu, R.; Shen, J. Design and experiment of grass soil separation device with combination of stubble cutting and grass guiding used for no-till planter. Trans. Chin. Soc. Agric. Mach. 2020, 51, 67–78. [Google Scholar]
- Celik, A.; Altikat, S. The effect of power harrow on the wheat residue cover and residue incorporation into the tilled soil layer. Soil Tillage Res. 2022, 215, 105202. [Google Scholar] [CrossRef]
- Matin, M.A.; Fielke, J.M.; Desbiolles, J.M.A. Torque and energy characteristics for strip-tillage cultivation when cutting furrows using three designs of rotary blade. Biosyst. Eng. 2015, 129, 329–340. [Google Scholar] [CrossRef]
- Li, C.; Tang, Y.; McHugh, A.D.; Wu, X.; Liu, M.; Li, M.; Xiong, T.; Ling, D.; Tang, Q.; Liao, M.; et al. Development and performance evaluation of a wet-resistant strip-till seeder for sowing wheat following rice. Biosyst. Eng. 2022, 220, 146–158. [Google Scholar] [CrossRef]
- Matin, M.A.; Desbiolles, J.M.A.; Fielke, J.M. Strip-tillage using rotating straight blades: Effect of cutting edge geometry on furrow parameters. Soil Tillage Res. 2016, 155, 271–279. [Google Scholar] [CrossRef]
- Cao, X.; Wang, Q.; Li, H.; He, J.; Lu, C. Combined row cleaners research with side cutter and stubble clean disk of corn no-till seeder. Trans. Chin. Soc. Agric. Mach. 2021, 52, 36–44. [Google Scholar]
- Vaitauskienė, K.; Šarauskis, E.; Romaneckas, K.; Jasinskas, A. Design, development and field evaluation of row-cleaners for strip tillage in conservation farming. Soil Tillage Res. 2017, 174, 139–146. [Google Scholar] [CrossRef]
- Chen, G.; Wang, Q.; Li, H.; He, J.; Wang, X.; Zhang, X.; He, D. Experimental research on vertical straw cleaning and soil tillage device based on Soil-Straw composite model. Comput. Electron. Agric. 2024, 216, 108510. [Google Scholar] [CrossRef]
- Torbert, H.A.; Ingram, J.T.; Prior, S.A. Planter aid for heavy residue conservation tillage systems. Agron. J. 2007, 99, 478–480. [Google Scholar] [CrossRef]
- Nelson, W.S.; Shinners, K.J. Performance of rake mechanisms for cheating residue free seed bands. Am. Soc. Agric. Eng. 1988, 32, 1131–1137. [Google Scholar] [CrossRef]
- Hou, S.; Zhu, Y.; Zhu, X.; Wang, Y.; Ji, W.; Chen, H. Design and experiment of a straw clearing mulching no-tillage planter. Biosyst. Eng. 2022, 221, 69–80. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, L.; Yang, X.; Zhao, Z.; Liu, X. Design and experiment of no-till precision planter for corn. Trans. CSAE 2016, 32 (Suppl. 2), 1–6. [Google Scholar]
- Fan, X.; Jia, H.; Zhang, W.; Yang, H.; Gu, Y.; Li, H. Parametric analysis of finger-type anti-blocking residue-cleaner for no-till planting. Trans. Chin. Soc. Agric. Mach. 2011, 42, 56–60. [Google Scholar]
- Fang, H.; Ji, C.; Tagar, A.; Zhang, Q.; Guo, J. Simulation Analysis of Straw Movement in Straw-Soil-Rotary Blade System. Trans. Chin. Soc. Agric. Mach. 2016, 47, 60–67. [Google Scholar]
- Yu, C.; Wang, Q.; Li, H.; He, J.; Lu, C.; Liu, H. Design and Experiment of Spiral-split Sowing Strip Cleaning Device. Trans. Chin. Soc. Agric. Mach. 2020, 51, 212–219. [Google Scholar]
- Yuan, P.; Li, H.; Huang, S.; Jiang, S.; Xu, J.; Lin, H.; Li, R. Parameter Optimization and Experiment of a Seed Furrow Cleaning Device for No-Till Maize Seeding. Agriculture 2022, 12, 1901. [Google Scholar] [CrossRef]
- Wang, X.; Hong, H.; Wang, Q.; He, J.; Chen, W. Calibration method of soil contact characteristic parameters based on DEM theory. Trans. Chin. Soc. Agric. Mach. 2017, 48, 78–85. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Soil Particle–Straw | Soil Particle–Soil Particle | Straw–Straw | Tine Disc–Soil Particle | Tine Disc–Straw |
|---|---|---|---|---|---|
| Coefficient of restitution | 0.5 | 0.25 | 0.3 | 0.28 | 0.3 |
| Coefficient of static friction | 0.33 | 0.4 | 0.36 | 0.5 | 0.37 |
| Coefficient of rolling friction | 0.13 | 0.25 | 0.10 | 0.04 | 0.10 |
| Factors and Levels | Forwarding Speed x1/(km/h) | Disc Rake Angle x2/° | Lateral Distance x3/mm |
|---|---|---|---|
| −1 | 5 | 20 | 480 |
| 0 | 7 | 30 | 520 |
| 1 | 9 | 40 | 560 |
| No. | Experimental Level | Response Value | |||
|---|---|---|---|---|---|
| Forwarding Speed x1 | Disc Rake Angle x2 | Lateral Distance x3 | Straw Cleaning Rate y1/% | The Mass of Straw Returned in the Drip Irrigation Coverage Area y2/kg | |
| 1 | −1 | −1 | 0 | 86.13 | 0.94 |
| 2 | 1 | −1 | 0 | 90.82 | 0.79 |
| 3 | −1 | 1 | 0 | 87.59 | 1.24 |
| 4 | 1 | 1 | 0 | 93.25 | 1.08 |
| 5 | −1 | 0 | −1 | 87.51 | 0.91 |
| 6 | 1 | 0 | −1 | 95.40 | 0.72 |
| 7 | −1 | 0 | 1 | 89.60 | 1.05 |
| 8 | 1 | 0 | 1 | 93.82 | 1.13 |
| 9 | 0 | −1 | −1 | 89.13 | 0.84 |
| 10 | 0 | 1 | −1 | 89.65 | 0.86 |
| 11 | 0 | −1 | 1 | 88.62 | 0.98 |
| 12 | 0 | 1 | 1 | 91.67 | 1.36 |
| 13 | 0 | 0 | 0 | 92.76 | 0.93 |
| 14 | 0 | 0 | 0 | 92.33 | 0.90 |
| 15 | 0 | 0 | 0 | 92.17 | 0.96 |
| 16 | 0 | 0 | 0 | 92.34 | 0.96 |
| 17 | 0 | 0 | 0 | 91.94 | 0.90 |
| Source of Variance | Sum of Squares | df | Mean Square | F | p | |
|---|---|---|---|---|---|---|
| Straw cleaning rate | Model | 101.05 | 9 | 11.23 | 88.78 | <0.0001 *** |
| x1 | 63.06 | 1 | 63.06 | 498.59 | <0.0001 *** | |
| x2 | 6.96 | 1 | 6.96 | 55.01 | 0.0001 *** | |
| x3 | 0.51 | 1 | 0.51 | 4.03 | 0.0846 * | |
| x1x2 | 0.24 | 1 | 0.24 | 1.86 | 0.2149 | |
| x1x3 | 3.37 | 1 | 3.37 | 26.62 | 0.0013 *** | |
| x2x3 | 1.60 | 1 | 1.60 | 12.65 | 0.0093 *** | |
| x12 | 1.15 | 1 | 1.15 | 9.10 | 0.0195 ** | |
| x22 | 23.01 | 1 | 23.01 | 181.95 | <0.0001 *** | |
| x32 | 0.17 | 1 | 0.17 | 1.37 | 0.2803 | |
| Residual | 0.89 | 7 | 0.13 | |||
| Lack of fit | 0.53 | 3 | 0.18 | 1.94 | 0.2645 | |
| Pure error | 0.36 | 4 | 0.090 | |||
| Cor total | 101.94 | 16 | ||||
| The mass of straw returned in the drip irrigation coverage area | Model | 0.39 | 9 | 0.044 | 21.74 | 0.0003 *** |
| x1 | 0.022 | 1 | 0.022 | 10.93 | 0.0130 ** | |
| x2 | 0.12 | 1 | 0.12 | 60.71 | 0.0001 *** | |
| x3 | 0.18 | 1 | 0.18 | 87.72 | <0.0001 *** | |
| x1x2 | 2.5 × 10−5 | 1 | 2.5 × 10−5 | 0.012 | 0.9145 | |
| x1x3 | 0.018 | 1 | 0.018 | 9.03 | 0.0198 ** | |
| x2x3 | 0.032 | 1 | 0.032 | 16.06 | 0.0051 *** | |
| x12 | 6.57 × 10−4 | 1 | 6.57 × 10−4 | 0.33 | 0.5859 | |
| x22 | 0.021 | 1 | 0.021 | 10.22 | 0.0151 ** | |
| x32 | 0.00042 | 1 | 0.00042 | 0.21 | 0.6617 | |
| Residual | 0.014 | 7 | 0.002 | |||
| Lack of fit | 0.011 | 3 | 0.0036 | 3.90 | 0.1109 | |
| Pure error | 0.0036 | 4 | 9.00 × 10−4 | |||
| Cor total | 0.41 | 16 |
| No. | Cleaning Rate/% | Straw Cleaning Width /mm | Straw Coverage Rate of Drip Irrigation Area/% |
|---|---|---|---|
| 1 | 87.43 | 533.6 | 78.71 |
| 2 | 89.55 | 524.1 | 84.35 |
| 3 | 88.74 | 527.9 | 83.69 |
| 4 | 86.96 | 535.2 | 77.58 |
| 5 | 90.38 | 514.3 | 79.82 |
| 6 | 92.03 | 538.7 | 83.64 |
| 7 | 88.17 | 523.2 | 80.22 |
| 8 | 86.84 | 517.2 | 76.74 |
| 9 | 88.78 | 531.0 | 81.87 |
| Average | 89.13 | 527.2 | 80.74 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, P.; Zhu, X.; Zhang, X.; You, J.; Yan, J.; Qiu, S. Design and Experimental Research on Staggered Straw Cleaning Device for No-Till Seeding in Drip Irrigation Area. Agronomy 2025, 15, 34. https://doi.org/10.3390/agronomy15010034
Yuan P, Zhu X, Zhang X, You J, Yan J, Qiu S. Design and Experimental Research on Staggered Straw Cleaning Device for No-Till Seeding in Drip Irrigation Area. Agronomy. 2025; 15(1):34. https://doi.org/10.3390/agronomy15010034
Chicago/Turabian StyleYuan, Panpan, Xingliang Zhu, Xuejun Zhang, Jia You, Jinshan Yan, and Shilong Qiu. 2025. "Design and Experimental Research on Staggered Straw Cleaning Device for No-Till Seeding in Drip Irrigation Area" Agronomy 15, no. 1: 34. https://doi.org/10.3390/agronomy15010034
APA StyleYuan, P., Zhu, X., Zhang, X., You, J., Yan, J., & Qiu, S. (2025). Design and Experimental Research on Staggered Straw Cleaning Device for No-Till Seeding in Drip Irrigation Area. Agronomy, 15(1), 34. https://doi.org/10.3390/agronomy15010034