

Progress and Challenges in Research on Key Technologies for Laser Weed Control Robot-to-Target System

Abstract
1. Introduction
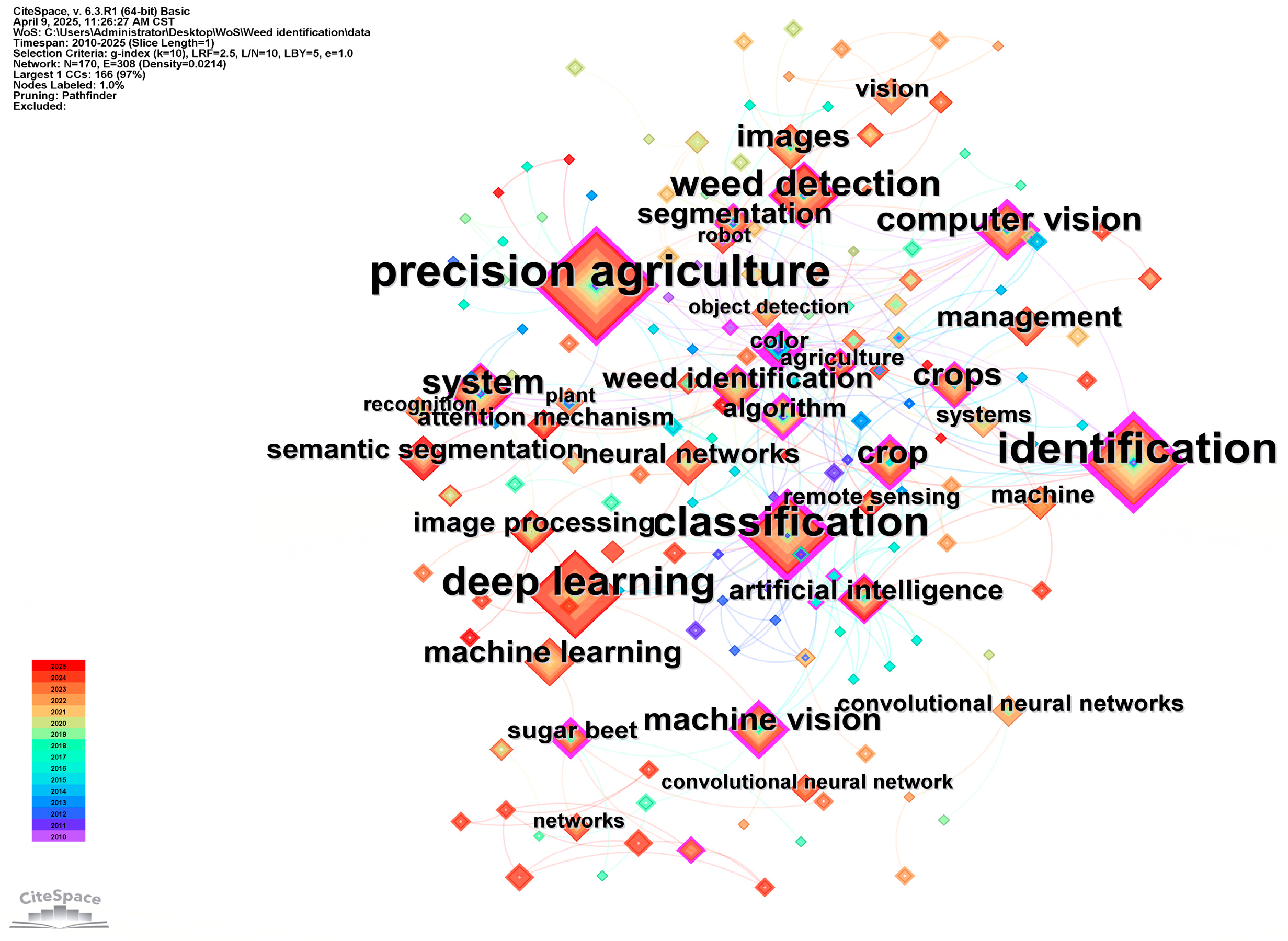
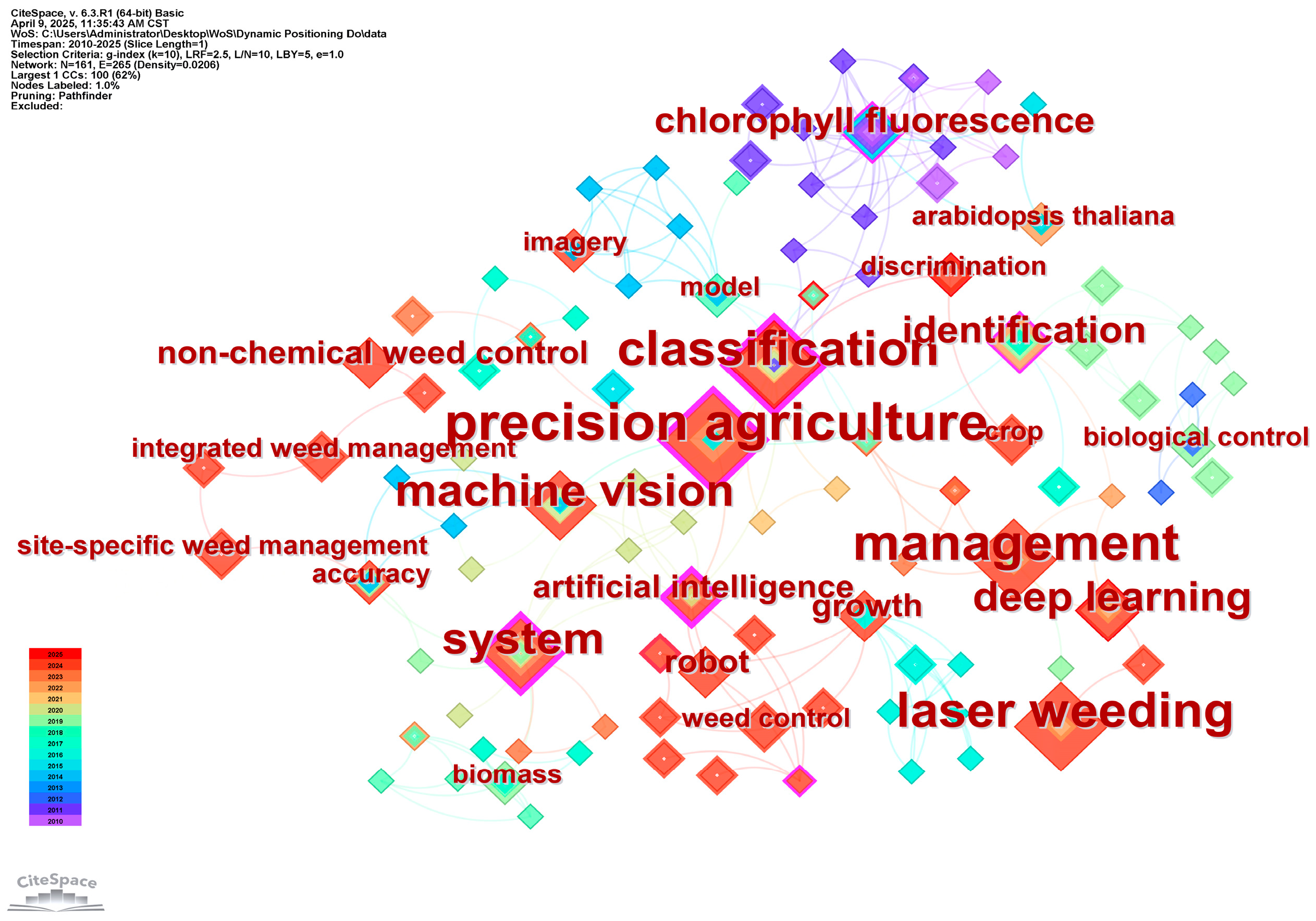
2. Methodology
3. Progress of Key Technology Research on Targeting System
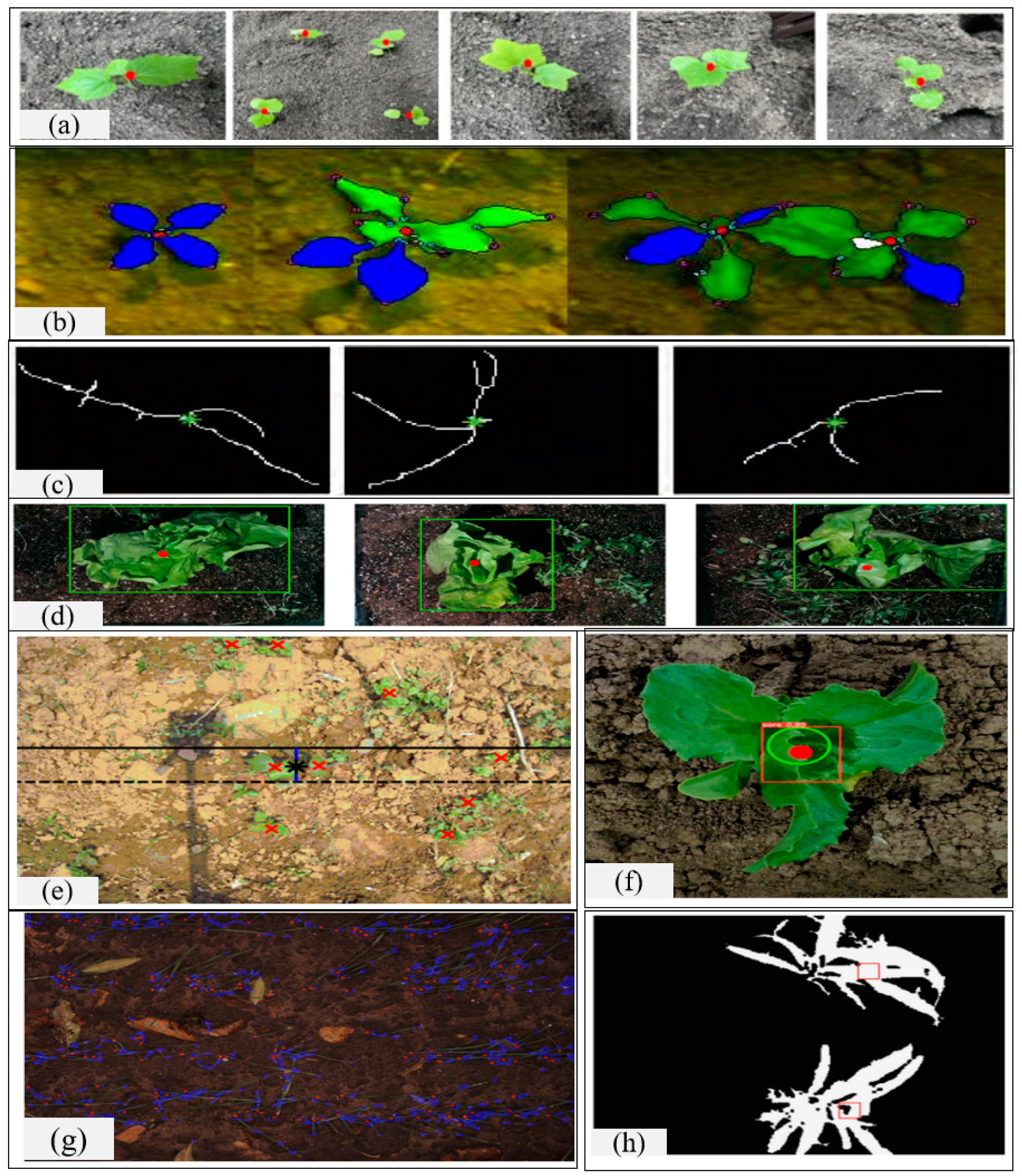
3.1. Target Identification

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | Country | Target of Detection | Sample Size | Algorithm | Performance |
|---|---|---|---|---|---|
| Zhao et al. (2025) [49] | China | Strawberry seedlings (crop) and weeds | 2153 | DIN-LW-YOLO | Average mAP for region and point detection: 88.5% and 85.0%, respectively. |
| Zhu et al. (2022) [54] | China | Weeds and corn seedlings (crop) | 15,000 | YOLOX | Average detection rates for corn seedlings and weeds: 92.45% and 88.94%, respectively. |
| Xiong et al. (2017) [55] | United Kingdom | Dicotyledon and clover | _ | Color Segmentation Algorithm/Shape Extraction Algorithm | Processing time for color segmentation: 0.0958 s (based on area) and 0.0251 s (based on erosion and dilation); Shape extraction: 0.063 s. |
| Hussain et al. and Fatima et al. (2023) [47,48] | Pakistan | Three crops (okra, bitter gourd, sponge gourd) and four weed species (horseweed, Herb Paris, grasses, small weeds) | 9000 | YOLOv5 | Average mAP: 88%, Inference time: 0.4 s. |
| Qin et al. (2024) [56] | China | Veronica didyma (weed) | 234 | YOLOv7 | Accuracy: 94.94%, Recall: 95.65%, mAP@0.5: 0.972. |
| Source | Country | Target of Detection | Sample Size | Methodologies | Performance |
|---|---|---|---|---|---|
| Zhang et al. (2024) [50] | China | The Apical Meristematic Tissue | 6978 | F-YOLOv8n-seg-CDA | Overall detection accuracy: 81%, Average inference speed: 82.9 FPS. |
| Midtiby et al. [52] | Denmark | Lettuce Stem Emergence Point | 805 leaves/223 data points | Beet PSEP estimation system based on leaf detection | 95% of cases had error less than 3.58 mm. |
| Zhao et al. [57] | China | Lettuce Center | 584 | LettWd-YOLOv8l | Average localization accuracy: 86.05%. |
| Zhang et al. [59] | China | Lettuce Stem Emergence Point | 1918 | SE-YOLOv5x | Accuracy: 97.14%. |
| Karimi et al. (2018) [60] | Iran | Cereal Plant Emergence Point | 5719 | CNN-based PSEP localization system | F1 score: 82% (Field 1), 86% (Field 2), 74% (Field 3) under varying PSEP densities. |
| Wu et al. (2022) [51] | China | Cereal Stem Center (Seedling Stage) | 100 | HSV and Zhang-Sue skeleton extraction method | Achieved precise recognition and localization of seedling stage crop stems, with positioning error less than 12 mm. |
| Jin and Tang (2009) [61] | USA | Corn Plant Center | 122 | Skeleton extraction algorithm | Recognition accuracy: 96.7%, Maximum positioning error: 5 cm (74.6%) and 1 cm (62.3%). |
| Hu et al. (2013) [53] | China | Lettuce Plant Center | 80 | 2G-R-B combined with connected domain | Correct recognition rate for cotton seedlings: 95.8%, for lettuce seedlings: 100%. |
| Zong et al. (2019) [58] | China | Corn Canopy at Seedling Stage | 8000 | Improved centroid detection algorithm | Average recognition rate: 92%, Average processing time per frame: 17 s, Centroid positioning error: ≤1 pixel. |
| Wei et al. (2017) [62] | China | Corn Plant Center | 108 | Super Green Enhancement—Otsu Threshold Segmentation—Horizontal Set Localisation—Partitioned Search for Accurate Recognition of Maize Plant Hearts | Recognition accuracy: 96%. |
3.2. Laser Beam Control Technology
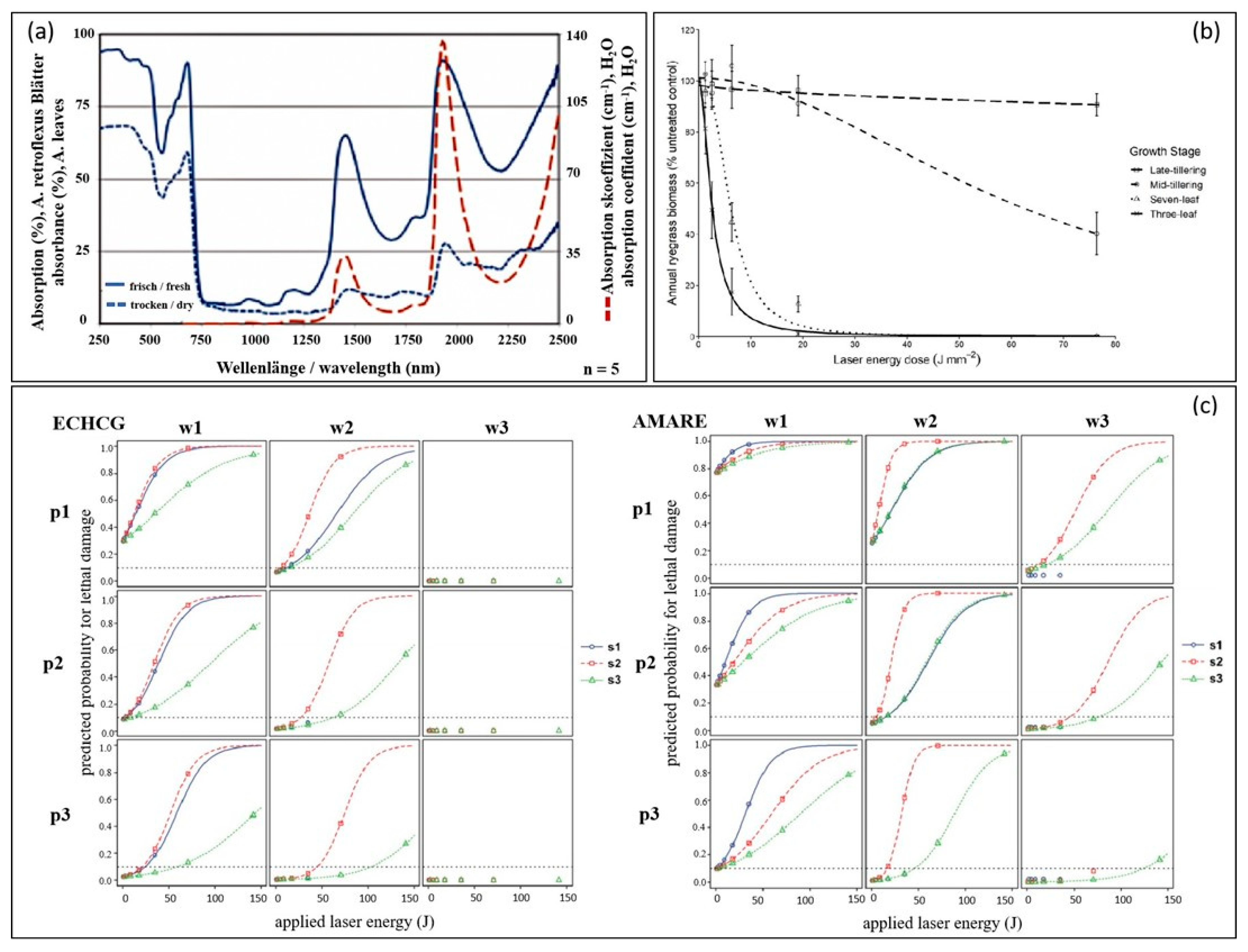
3.3. Laser Modulation Related Research
| Laser Type | Laser Wavelength | Experimental Parameters | Experimental Objects | Growth Stage | Conclusion | Reference |
|---|---|---|---|---|---|---|
| CO2 Laser | 10.6 μm | Power: 4/10/20 W Speed: 1/5/10 mm/s Spot Diameter: 0.6 mm (24 cm focal length) | Chenopodium album, Sinapis arvensis, Lolium perenne | Cotyledon, 2-leaf, 4-leaf stages | Chenopodium album: 0.9 J/mm dose reduced 90% biomass. Sinapis arvensis: 2.3 J/mm dose reduced 90% biomass. | Heisel et al. (2002) [21] |
| Thulium-doped Fiber Laser | 2000 nm | Power: 50 W Spot Diameter: 2 mm Angle: 45° Dose: 0–15.9 J/mm2 | Elymus repens | 1-leaf, 2-leaf, 3-leaf stages | ≥1.6 J/mm2 effectively kills 3-leaf plants. | Andreasen et al. (2024) [69] |
| Fiber-coupled Diode Laser | 975 nm | Power: 25 W Spot Diameter: 5 mm Irradiation Time: 1–60 s Energy Density: 1.3–76.4 J/mm2 | Lolium rigidum | 3-leaf, 7-leaf, late tillering stage | 76.4 J/mm2 achieves full control. | Coleman et al. (2021) [68] |
| CO2 Laser, Diode Laser, Solid-state Laser | 10,600 nm, 940 nm, 532 nm | Energy: 125–1400 J/plant Spot Diameter: 2 mm. | Amaranthus retroflexus | Seedling, 2-leaf, 4-leaf stages | CO2 laser has the highest absorption efficiency, with low-power long-duration exposure being more effective. | Marx et al. (2012) [67] |
| CO2 Laser, Diode Laser, Fiber Laser | 10,600 nm, 940 nm, 980 nm, 1908 nm, 532 nm | Energy: 125–1400 J/plant Spot Diameter: 2 mm | Amaranthus retroflexus, Echinochloa crus-galli, Chenopodium album | Cotyledon to mature stages | CO2 laser has the highest efficiency (125 J/plant); 532 nm has the lowest efficiency (1400 J/plant). | Andreasen et al. (2022) [45] |
| CO2 Laser, Diode Laser | 10,600 nm, 940 nm | CO2: 20 W × 1 s (6 mm) Diode: 250 W × 2 s (6 mm) | Echinochloa crus-galli, Nicotiana tabacum | Cotyledon, 2-leaf, 3-leaf stages | CO2 laser absorption rate nearly 100%, significantly more efficient than diode laser. | Wöltjen et al. (2008) [23] |
| Diode Laser | 532 nm, 810 nm | 532 nm: 5 W (0.9/1.8 mm) 810 nm: 90 W (1.2/2.4 mm) | Stellaria media, Tripleurospermum inodorum, Brassica napus | cotyledon stage | Stellaria media: 532 nm (0.9 mm) ED90 = 1.4 J. Tripleurospermum inodorum: 532 nm (1.8 mm) ED90 = 2.7 J. | Mathiassen et al. (2006) [20] |
| He-Ne Laser, CO2 Laser | 623 nm, 10,600 nm | CO2: 1–40 W Speed: 1–10 mm/s Spot: 0.6 mm2 | Solanum nigrum | Cotyledon, two true-leaf stages | At 250 plants/m2 density, 22.5 kJ/m2 required to achieve 90% kill. | Heisel et al. (2022) [21] |
| Continuous Fiber Laser | 1064 nm | Power: 100 W Speed: 80 mm/s Line Distance: 0.5 mm Spot: 8 mm | Veronica didyma | Seedling stage | Complete carbonization of leaves and growth points. | Qin et al. (2024) [56] |
| Blue Laser | 400–500 nm | Dose: 13–15 J/mm | Echinochloa colonum, Amaranthus retroflexus, Plantago asiatica | 2-leaf, 4-leaf stages | Dry weight control > 85%, more effective on grasses. | Zhu et al. (2022) [54] |
| CO2 Laser | 10,600 nm | Energy Density: 0.08–5.00 J/mm2 Spot Diameter: Multiple sizes Irradiation Time: 500 ms | Echinochloa crus-galli, Amaranthus retroflexus | 2–4 leaf stages | Highest efficiency when spot center covers 100%, dicotyledons more sensitive. | Marx et al. (2012) [24] |
| Semiconductor Laser | 405 nm, 635 nm, 450 nm | Power: 0.3–5 W Irradiation Time: 0.5–7 s | Elytrigia repens | 35-day seedlings | 5 W suitable for >2 mm stems but with risk of collateral damage; 1 W suitable for <2 mm stems. | Rakhmatulin and Andreasen (2020) [25] |
| Diode Laser | 450 nm | Power: 1.2–6.1 W Distance: 5–15 cm | Palmer amaranth, smallflower morningglory | 3-week-old plants | 4.2 W × 3 s achieves 100% kill, 6.1 W × 1.5 s achieves full control. | Mwitta et al. (2022) [70] |
4. Technological Bottlenecks and Challenges
5. Conclusions and Outlook
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fitt, G.; Wilson, L. Integrated pest management for sustainable agriculture. In Integrated Pest Management: Principles and Practice; CABI: Wallingford, UK, 2012; pp. 27–40. [Google Scholar]
- Little, N.G.; DiTommaso, A.; Westbrook, A.S.; Ketterings, Q.M.; Mohler, C.L. Effects of fertility amendments on weed growth and weed–crop competition: A review. Weed Sci. 2021, 69, 132–146. [Google Scholar] [CrossRef]
- Liu, J.; Xiang, J.; Jin, Y.; Liu, R.; Yan, J.; Wang, L. Boost precision agriculture with unmanned aerial vehicle remote sensing and edge intelligence: A survey. Remote Sens. 2021, 13, 4387. [Google Scholar] [CrossRef]
- Zabaloy, M.C.; Garland, J.L.; Gomez, M.A. Assessment of the impact of 2, 4-dichlorophenoxyacetic acid (2, 4-D) on indigenous herbicide-degrading bacteria and microbial community function in an agricultural soil. Appl. Soil Ecol. 2010, 46, 240–246. [Google Scholar] [CrossRef]
- Riah, W.; Laval, K.; Laroche-Ajzenberg, E.; Mougin, C.; Latour, X.; Trinsoutrot-Gattin, I. Effects of pesticides on soil enzymes: A review. Environ. Chem. Lett. 2014, 12, 257–273. [Google Scholar] [CrossRef]
- Cycoń, M.; Piotrowska-Seget, Z. Pyrethroid-degrading microorganisms and their potential for the bioremediation of contaminated soils: A review. Front. Microbiol. 2016, 7, 1463. [Google Scholar] [CrossRef]
- Pimentel, D. Environmental and economic costs of the application of pesticides primarily in the United States. Environ. Dev. Sustain. 2005, 7, 229–252. [Google Scholar] [CrossRef]
- Heap, I. The International Survey of Herbicide Resistant Weeds. 2010. Available online: http://www.weedscience.com (accessed on 2 March 2025).
- What Is the Current Status of Resistant Weed Occurrence Globally? Which Herbicide Resistance Problems Are Most Prominent? Available online: https://cn.agropages.com/News/NewsDetail---32793.htm (accessed on 2 March 2025).
- Bàrberi, P. Weed management in organic agriculture: Are we addressing the right issues? Weed Res. 2002, 42, 177–193. [Google Scholar] [CrossRef]
- Quan, L.; Jiang, W.; Li, H.; Li, H.; Wang, Q.; Chen, L. Intelligent intra-row robotic weeding system combining deep learning technology with a targeted weeding mode. Biosyst. Eng. 2022, 216, 13–31. [Google Scholar] [CrossRef]
- Zheng, S.; Zhao, X.; Fu, H.; Tan, H.; Zhai, C.; Chen, L. Design and Experimental Evaluation of a Smart Intra-Row Weed Control System for Open-Field Cabbage. Agronomy 2025, 15, 112. [Google Scholar] [CrossRef]
- Barnes, A.P.; Soto, I.; Eory, V.; Beck, B.; Balafoutis, A.; Sánchez, B.; Vangeyte, J.; Fountas, S.; van der Wal, T.; Gómez-Barbero, M. Exploring the adoption of precision agricultural technologies: A cross regional study of EU farmers. Land Use Policy 2019, 80, 163–174. [Google Scholar] [CrossRef]
- Charudattan, R.; Dinoor, A. Biological control of weeds using plant pathogens: Accomplishments and limitations. Crop Prot. 2000, 19, 691–695. [Google Scholar] [CrossRef]
- Zimdahl, R.L.; Basinger, N.T. Fundamentals of Weed Science; Elsevier: Amsterdam, The Netherlands, 2024. [Google Scholar]
- Bakker, T.; Bontsema, J.; Müller, J. Systematic design of an autonomous platform for robotic weeding. J. Terramech. 2010, 47, 63–73. [Google Scholar] [CrossRef]
- Charudattan, R. Biological control of weeds by means of plant pathogens: Significance for integrated weed management in modern agro-ecology. BioControl 2001, 46, 229–260. [Google Scholar] [CrossRef]
- Swanton, C.J.; Nkoa, R.; Blackshaw, R.E. Experimental methods for crop–weed competition studies. Weed Sci. 2015, 63, 2–11. [Google Scholar] [CrossRef]
- WeLASER Consortium. WeLASER Project: Laser-BASED Weeding for Sustainable Agriculture. 2023. Available online: https://welaser-project.eu/ (accessed on 5 March 2025).
- Mathiassen, S.K.; Bak, T.; Christensen, S.; Kudsk, P. The effect of laser treatment as a weed control method. Biosyst. Eng. 2006, 95, 497–505. [Google Scholar] [CrossRef]
- Heisel, T.; Schou, J.; Andreasen, C.; Christensen, S. Using laser to measure stem thickness and cut weed stems. Weed Res. 2002, 42, 242–248. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, C.; Liu, Z.; Hu, Z.; Wang, X. The methdology function of CiteSpace mapping knwoledge domains. Stud. Sci. Sci. 2015, 33, 242–253. [Google Scholar]
- Wöltjen, C.; Haferkamp, H.; Rath, T.; Herzog, D. Plant growth depression by selective irradiation of the meristem with CO2 and diode lasers. Biosyst. Eng. 2008, 101, 316–324. [Google Scholar] [CrossRef]
- Marx, C.; Barcikowski, S.; Hustedt, M.; Haferkamp, H.; Rath, T. Design and application of a weed damage model for laser-based weed control. Biosyst. Eng. 2012, 113, 148–157. [Google Scholar] [CrossRef]
- Rakhmatulin, I.; Andreasen, C. A concept of a compact and inexpensive device for controlling weeds with laser beams. Agronomy 2020, 10, 1616. [Google Scholar] [CrossRef]
- Fennimore, S.A.; Cutulle, M. Robotic weeders can improve weed control options for specialty crops. Pest Manag. Sci. 2019, 75, 1767–1774. [Google Scholar] [CrossRef] [PubMed]
- Alam, M.; Alam, M.S.; Roman, M.; Tufail, M.; Khan, M.U.; Khan, M.T. Real-time machine-learning based crop/weed detection and classification for variable-rate spraying in precision agriculture. In Proceedings of the 2020 7th International Conference on Electrical and Electronics Engineering (ICEEE), Antalya, Turkey, 14–16 April 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Robotics, C. Autonomous LaserWeeder. Available online: https://carbonrobotics.com/autonomous-weeder (accessed on 9 June 2024).
- Robot with Laser Kills Weed. Available online: https://rbtx.com/en-US/solutions/ponchon-sas-autonomous-robot-laser-weed-agriculture-delta-robot (accessed on 5 March 2025).
- Slaughter, D.C.; Giles, D.; Downey, D. Autonomous robotic weed control systems: A review. Comput. Electron. Agric. 2008, 61, 63–78. [Google Scholar] [CrossRef]
- Upadhyay, A.; Zhang, Y.; Koparan, C.; Rai, N.; Howatt, K.; Bajwa, S.; Sun, X. Advances in ground robotic technologies for site-specific weed management in precision agriculture: A review. Comput. Electron. Agric. 2024, 225, 109363. [Google Scholar] [CrossRef]
- Yaseen, M.U.; Long, J.M. Laser Weeding Technology in Cropping Systems: A Comprehensive Review. Agronomy 2024, 14, 2253. [Google Scholar] [CrossRef]
- Jiao, J.; Zang, Y.; Chen, C. Key Technologies of Intelligent Weeding for Vegetables: A Review. Agriculture 2024, 14, 1378. [Google Scholar] [CrossRef]
- Lytridis, C.; Pachidis, T. Recent advances in agricultural robots for automated weeding. AgriEngineering 2024, 6, 3279–3296. [Google Scholar] [CrossRef]
- Gao, W.-T.; Su, W.-H. Weed management methods for herbaceous field crops: A review. Agronomy 2024, 14, 486. [Google Scholar] [CrossRef]
- Muchhadiya, R.M.; Kumawat, P.D.; Gohil, B.S.; Sakarvadia, H.L. Precision weed management using artificial intelligence tools and techniques for sustainable agriculture. Agric. Food e-Newsl. 2024, 6, 606–611. [Google Scholar]
- Mohan, S.S.; Venkat, R.; Rahaman, S.; Vinayak, M.; Babu, B.H. Role of AI in Agriculture: Applications, Limitations and Challenges: A Review. Agric. Rev. 2023, 44, 231. [Google Scholar] [CrossRef]
- Christensen, S.; Søgaard, H.T.; Kudsk, P.; Nørremark, M.; Lund, I.; Nadimi, E.S.; Jørgensen, R. Site-specific weed control technologies. Weed Res. 2009, 49, 233–241. [Google Scholar] [CrossRef]
- Xu, H.; Li, T.; Hou, X.; Wu, H.; Shi, G.; Li, Y.; Zhang, G. Key technologies and research progress of intelligent weeding robots. Weed Sci. 2025, 73, e25. [Google Scholar] [CrossRef]
- Tran, D.; Schouteten, J.J.; Degieter, M.; Krupanek, J.; Jarosz, W.; Areta, A.; Emmi, L.; De Steur, H.; Gellynck, X. European stakeholders’ perspectives on implementation potential of precision weed control: The case of autonomous vehicles with laser treatment. Precis. Agric. 2023, 24, 2200–2222. [Google Scholar]
- Zhang, H.; Cao, D.; Zhou, W.; Currie, K. Laser and optical radiation weed control: A critical review. Precis. Agric. 2024, 25, 2033–2057. [Google Scholar]
- Krupanek, J.; de Santos, P.G.; Emmi, L.; Wollweber, M.; Sandmann, H.; Scholle, K.; Di Minh Tran, D.; Jietse Schouteten, J.; Andreasen, C. Environmental performance of an autonomous laser weeding robot—A case study. Int. J. Life Cycle Assess. 2024, 29, 1021–1052. [Google Scholar] [CrossRef]
- Michaliszyn-Gabryś, B.; Bronder, J.; Jarosz, W.; Krupanek, J. Potential of eco-weeding with high-power laser adoption from the farmers’ perspective. Sustainability 2024, 16, 2353. [Google Scholar] [CrossRef]
- Qu, H.-R.; Su, W.-H. Deep learning-based weed–crop recognition for smart agricultural equipment: A review. Agronomy 2024, 14, 363. [Google Scholar] [CrossRef]
- Andreasen, C.; Scholle, K.; Saberi, M. Laser weeding with small autonomous vehicles: Friends or foes? Front. Agron. 2022, 4, 841086. [Google Scholar] [CrossRef]
- Abouziena, H.; Haggag, W. Weed control in clean agriculture: A review. Planta Daninha 2016, 34, 377–392. [Google Scholar] [CrossRef]
- Hussain, A.; Fatima, H.S.; Zia, S.M.; Hasan, S.; Khurram, M.; Stricker, D.; Afzal, M.Z. Development of cost-effective and easily replicable robust weeding machine—Premiering precision agriculture in Pakistan. Machines 2023, 11, 287. [Google Scholar] [CrossRef]
- Fatima, H.S.; ul Hassan, I.; Hasan, S.; Khurram, M.; Stricker, D.; Afzal, M.Z. Formation of a lightweight, deep learning-based weed detection system for a commercial autonomous laser weeding robot. Appl. Sci. 2023, 13, 3997. [Google Scholar] [CrossRef]
- Zhao, P.; Chen, J.; Li, J.; Ning, J.; Chang, Y.; Yang, S. Design and Testing of an autonomous laser weeding robot for strawberry fields based on DIN-LW-YOLO. Comput. Electron. Agric. 2025, 229, 109808. [Google Scholar] [CrossRef]
- Zhang, D.; Lu, R.; Guo, Z.; Yang, Z.; Wang, S.; Hu, X. Algorithm for Locating Apical Meristematic Tissue of Weeds Based on YOLO Instance Segmentation. Agronomy 2024, 14, 2121. [Google Scholar] [CrossRef]
- Wu, Y.J.; Wang, J.; Wang, Y.L. Crop stalk recognition and localization method based on skeleton extraction algorithm. Trans. Chin. Soc. Agric. Mach. 2022, 53, 334–340. [Google Scholar]
- Midtiby, H.S.; Giselsson, T.M.; Jørgensen, R.N. Estimating the plant stem emerging points (PSEPs) of sugar beets at early growth stages. Biosyst. Eng. 2012, 111, 83–90. [Google Scholar] [CrossRef]
- Hu, L.; Luo, X.W.; Zeng, S.; Zhang, Z.G.; Chen, X.F.; Lin, C.X. Crop recognition and localization method for inter-plant mechanical weeding device based on machine vision. Trans. Chin. Soc. Agric. Eng. 2013, 29, 12–18. [Google Scholar]
- Zhu, H.; Zhang, Y.; Mu, D.; Bai, L.; Zhuang, H.; Li, H. YOLOX-based blue laser weeding robot in corn field. Front. Plant Sci. 2022, 13, 1017803. [Google Scholar] [CrossRef]
- Xiong, Y.; Ge, Y.; Liang, Y.; Blackmore, S. Development of a prototype robot and fast path-planning algorithm for static laser weeding. Comput. Electron. Agric. 2017, 142, 494–503. [Google Scholar] [CrossRef]
- Qin, L.; Xu, Z.; Wang, W.; Wu, X. YOLOv7-based intelligent weed detection and laser weeding system research: Targeting veronica didyma in winter rapeseed fields. Agriculture 2024, 14, 910. [Google Scholar] [CrossRef]
- Zhao, C.T.; Wang, R.F.; Tu, Y.H.; Pang, X.X.; Su, W.H. Automatic lettuce weed detection and classification based on optimized convolutional neural networks for robotic weed control. Agronomy 2024, 14, 2838. [Google Scholar] [CrossRef]
- Zong, Z.; Zhao, S.; Liu, G. Recognition and centroid localization method for maize canopy at seedling stage. Trans. Chin. Soc. Agric. Mach. 2019, 50, 27–33. [Google Scholar]
- Zhang, J.L.; Su, W.H.; Zhang, H.Y.; Peng, Y. SE-YOLOv5x: An optimized model based on transfer learning and visual attention mechanism for identifying and localizing weeds and vegetables. Agronomy 2022, 12, 2061. [Google Scholar] [CrossRef]
- Karimi, H.; Skovsen, S.; Dyrmann, M.; Nyholm Jørgensen, R. A novel locating system for cereal plant stem emerging points’ detection using a convolutional neural network. Sensors 2018, 18, 1611. [Google Scholar] [CrossRef]
- Jin, J.; Tang, L. Corn plant sensing using real-time stereo vision. J. Field Robot. 2009, 26, 591–608. [Google Scholar] [CrossRef]
- Wei, S.J.; Zhang, Y.E.; Mei, S.L. Rapid recognition method for corn plant center based on overhead images. Trans. Chin. Soc. Agric. Mach. 2017, 48, 136–141. [Google Scholar]
- Wang, M.; Leal-Naranjo, J.A.; Ceccarelli, M.; Blackmore, S. A novel two-degree-of-freedom gimbal for dynamic laser weeding: Design, analysis, and experimentation. IEEE/ASME Trans. Mechatron. 2022, 27, 5016–5026. [Google Scholar] [CrossRef]
- Mwitta, C.J. Development of the Autonomous Diode Laser Weeding Robot. Doctoral Dissertation, University of Georgia, Athens, GA, USA, 2023. [Google Scholar]
- Du, X.; Li, J.; Zhao, W. Research on the mathematical model and design of a three loop controller for the oscillating scanning system of a laser line scanning galvanometer. Sci. Rep. 2023, 13, 18877. [Google Scholar] [CrossRef] [PubMed]
- Yu, L.; Yang, K.; Zhang, Z. Galvanometer driven optical system for laser dynamic focusing. Opt. Express 2022, 31, 673–683. [Google Scholar] [CrossRef] [PubMed]
- Marx, C.; Pastrana Pérez, J.C.; Hustedt, M.; Barcikowski, S.; Haferkamp, H.; Rath, T. Investigations on the absorption and the application of laser radiation for weed control. Landtechnik 2012, 67, 95–101. [Google Scholar]
- Coleman, G.; Betters, C.; Squires, C.; Leon-Saval, S.; Walsh, M. Low energy laser treatments control annual ryegrass (Lolium rigidum). Front. Agron. 2021, 2, 601542. [Google Scholar] [CrossRef]
- Andreasen, C.; Vlassi, E.; Salehan, N. Laser weeding: Opportunities and challenges for couch grass (Elymus repens (L.) Gould) control. Sci. Rep. 2024, 14, 11173. [Google Scholar] [CrossRef]
- Mwitta, C.; Rains, G.C.; Prostko, E. Evaluation of diode laser treatments to manage weeds in row crops. Agronomy 2022, 12, 2681. [Google Scholar] [CrossRef]
- Haug, S.; Ostermann, J. A crop/weed field image dataset for the evaluation of computer vision based precision agriculture tasks. In Proceedings of the Computer Vision-ECCV 2014 Workshops, Zurich, Switzerland, 6–7+12 September 2014; Proceedings, Part IV 13. Springer: Cham, Switzerland, 2015. [Google Scholar]
- Alotaibi, A. Deep generative adversarial networks for image-to-image translation: A review. Symmetry 2020, 12, 1705. [Google Scholar] [CrossRef]
- Lottes, P.; Behley, J.; Chebrolu, N.; Milioto, A.; Stachniss, C. Joint Stem Detection and Crop-Weed Classification for Plant-Specific Treatment in Precision Farming. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 8233–8238. [Google Scholar]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef]
- Arakeri, M.P.; Kumar, B.V.; Barsaiya, S.; Sairam, H.V. Computer vision based robotic weed control system for precision agriculture. In Proceedings of the 2017 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Udupi, India, 13–16 September 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Bawden, O.; Kulk, J.; Russell, R.; McCool, C.; English, A.; Dayoub, F.; Lehnert, C.; Perez, T. Robot for weed species plant-specific management. J. Field Robot. 2017, 34, 1179–1199. [Google Scholar] [CrossRef]
- Perez-Ruiz, M.; Carballido, J.; Agüera, J.; Rodríguez-Lizana, A. Development and evaluation of a combined cultivator and band sprayer with a row-centering RTK-GPS guidance system. Sensors 2013, 13, 3313–3330. [Google Scholar] [CrossRef]
- Andújar, D.; Escolà, A.; Dorado, J.; Fernández-Quintanilla, C. Weed discrimination using ultrasonic sensors. Weed Res. 2011, 51, 543–547. [Google Scholar] [CrossRef]
- Pedersen, S.M.; Lind, K.M. Precision Agriculture: Technology and Economic Perspectives; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Laser, H. Full-Time Intelligent Laser Weeding Robot. Available online: https://www.hglaser.com/product/pro-detail-jiguangchucaojiqirem.htm (accessed on 2 March 2025).
- Kuang, H.; Li, M. Analysis of Photoelectric Conversion Efficiency of Space Laser Energy Transfer Based on Temperature Rise Effect. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2019. [Google Scholar]


| Source | Country | Article Contributions |
|---|---|---|
| Yaseen and Long (2024) [32] | USA | Provided a comprehensive review of laser weeding technology, focusing on various laser platforms, their functionalities, applications, limitations, and key areas for improvement (e.g., reduced dwell time, automation, energy efficiency, affordability, and safety). |
| Zhang et al. (2024) [41] | USA | Reviewed the application of lasers and optical radiation in weed control, discussing their mechanisms, models, technical challenges, and future directions. |
| Krupanek et al. (2024) [42] | Poland | Provided a lifecycle environmental impact assessment of laser weeding robots, revealing potential environmental challenges in real-world applications. |
| Andreasen et al. (2022) [45] | Denmark | Explored the feasibility and pros/cons of using small autonomous vehicles with laser technology for weed control, emphasizing advantages in reducing non-target organism impacts and preserving soil health. |
| Upadhyay et al. (2024) [31] | USA | Summarized the research progress in laser weeding technology, including various laser types (e.g., CO2 lasers), robotic applications, and field trial results. |
| Jiao et al. (2024) [33] | China | Summarized research progress on laser weeding technology, covering different laser types (e.g., CO2, diode, and fiber lasers), platforms (robots and drones), and application examples. |
| Lytridis and Pachidis (2024) [34] | Greece | Mentioned the use of machine vision in laser weeding robots for weed detection. |
| Gao and Su (2024) [35] | China | Discussed the principles of laser weeding technology, application cases, effectiveness evaluation, and future development directions. |
| Muchhadiya et al. (2024) [36] | Gujarat | Introduced the integration of AI and robotics in laser weeding technology, highlighting its principles, advantages, and potential applications. |
| Mohan et al. (2023) [37] | India | Described the principles, advantages, and application scenarios of laser weeding technology. |
| Christensen et al. (2009) [38] | Denmark | Emphasized the combination of laser weeding technology with AI, computer vision, and deep learning. |
| Slaughter et al. (2008) [30] | United States | Mentioned laser weeding as a potential alternative to chemical herbicides, among other physical methods of weed control. |
| Xu et al. (2025) [39] | China | Presented the development history and research progress of laser weeding technology, including equipment design, algorithm optimization, and expanded application scenarios. |
| Tran et al. (2023) [40] | Belgium | Provided a comprehensive assessment of the implementation potential of laser weeding technology in Europe. |
| Michaliszyn-Gabryś et al. (2024) [43] | Poland | Evaluated the market acceptance and implementation barriers of laser weeding technology from the perspective of farmers, highlighting regional differences in acceptance and demand. |
| Qu and Su (2024) [44] | China | Reviewed the application of deep learning in agricultural equipment, showcasing the potential of laser weeding in smart agriculture. |
| Abouziena and Haggag (2016) [46] | Egypt | Highlighted the potential of laser weeding as an emerging technology, but noted that it is still in the developmental stage and has not yet been widely applied in large-scale agricultural production. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, R.; Zhang, D.; Wang, S.; Hu, X. Progress and Challenges in Research on Key Technologies for Laser Weed Control Robot-to-Target System. Agronomy 2025, 15, 1015. https://doi.org/10.3390/agronomy15051015
Lu R, Zhang D, Wang S, Hu X. Progress and Challenges in Research on Key Technologies for Laser Weed Control Robot-to-Target System. Agronomy. 2025; 15(5):1015. https://doi.org/10.3390/agronomy15051015
Chicago/Turabian StyleLu, Rui, Daode Zhang, Siqi Wang, and Xinyu Hu. 2025. "Progress and Challenges in Research on Key Technologies for Laser Weed Control Robot-to-Target System" Agronomy 15, no. 5: 1015. https://doi.org/10.3390/agronomy15051015
APA StyleLu, R., Zhang, D., Wang, S., & Hu, X. (2025). Progress and Challenges in Research on Key Technologies for Laser Weed Control Robot-to-Target System. Agronomy, 15(5), 1015. https://doi.org/10.3390/agronomy15051015