Unmanned Aerial Systems for Investigating the Polar Atmospheric Boundary Layer—Technical Challenges and Examples of Applications

 ,
,  ,
,  , , , , , , , , , , , add
Show full author list
, , , , , , , , , , , add
Show full author list
Abstract
:1. Introduction
2. Unmanned Systems and Polar Operations
2.1. MAV
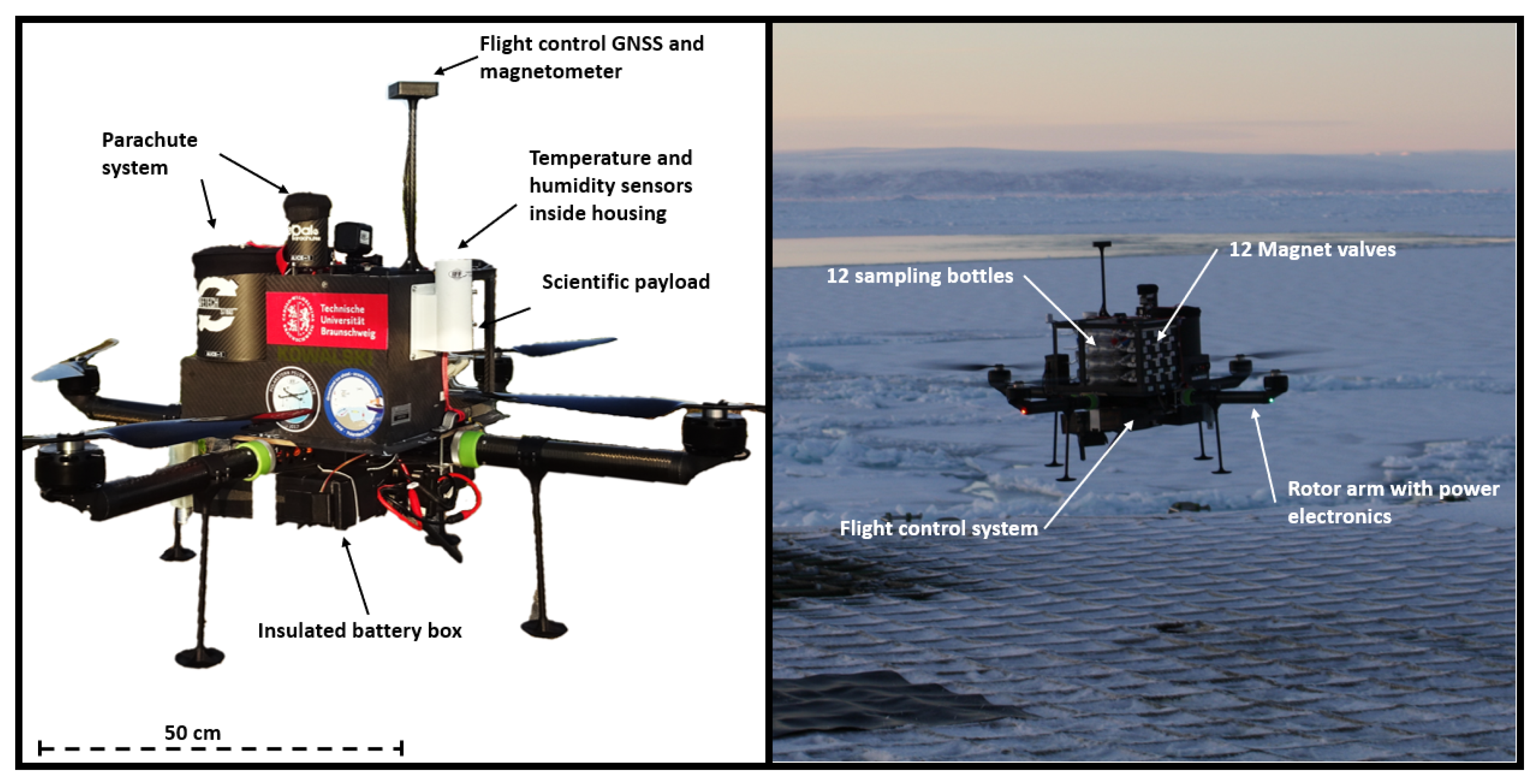
2.2. ALICE
2.3. ALADINA
3. Challenges for Operations in Polar Areas and Applications
3.1. Take-Off and Landing Concept (MAV and ALADINA)
3.2. Operation from the Research Vessel (ALICE)
- a bidirectional link for primary flight control at 2.4 GHz
- a bidirectional data link for the autopilot control at 868 MHz
- a meteorological data downlink with a temporal resolution of 1 Hz for real-time data at 433 MHz
- a video downlink as backup system allowing the pilot to stabilize the yaw movement of the UAS in case of a loss of heading information in the autopilot system at 5 GHz
- a link for activating the parachute rescue system at 868 MHz
3.3. Insulation of System and Payload (ALADINA)
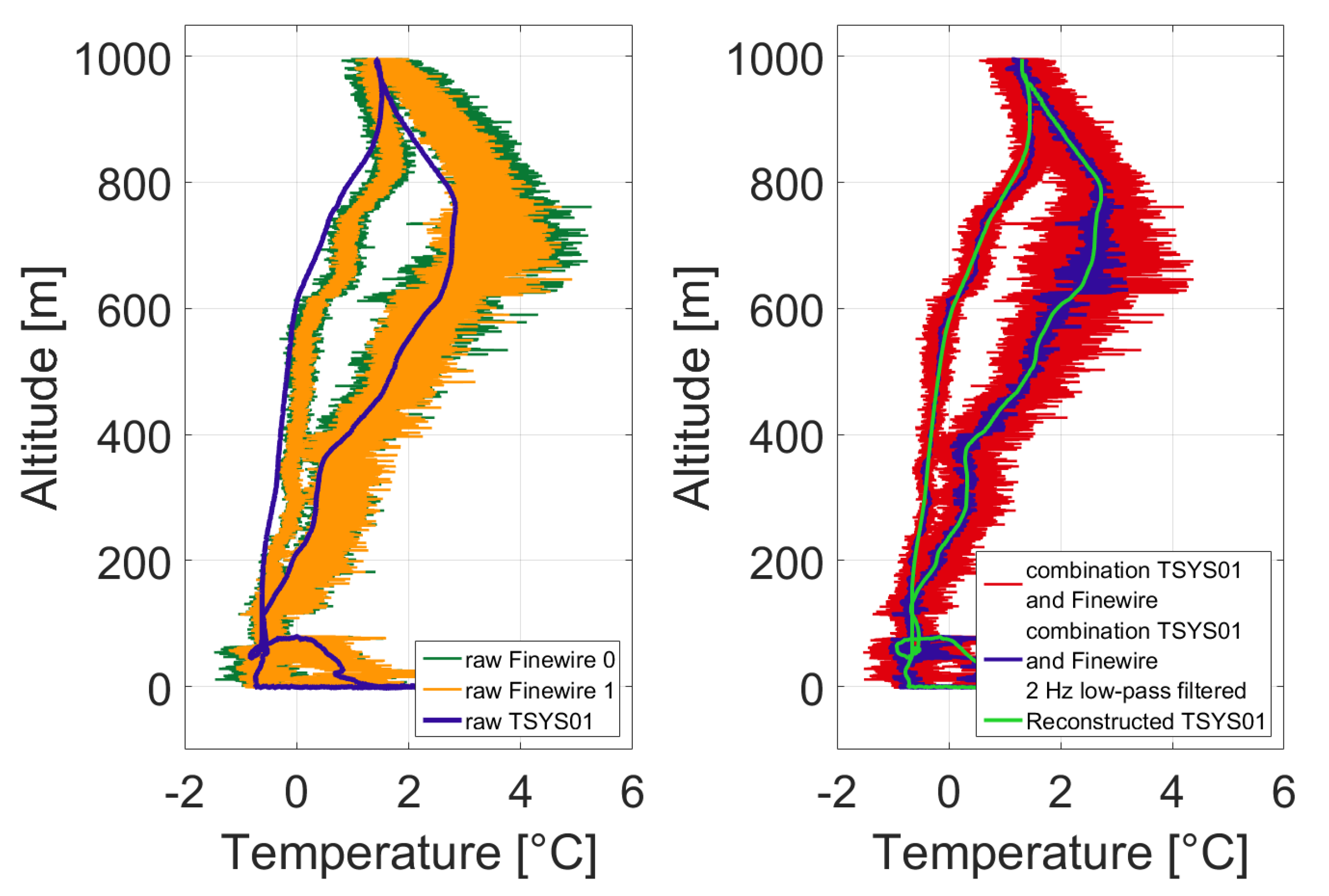
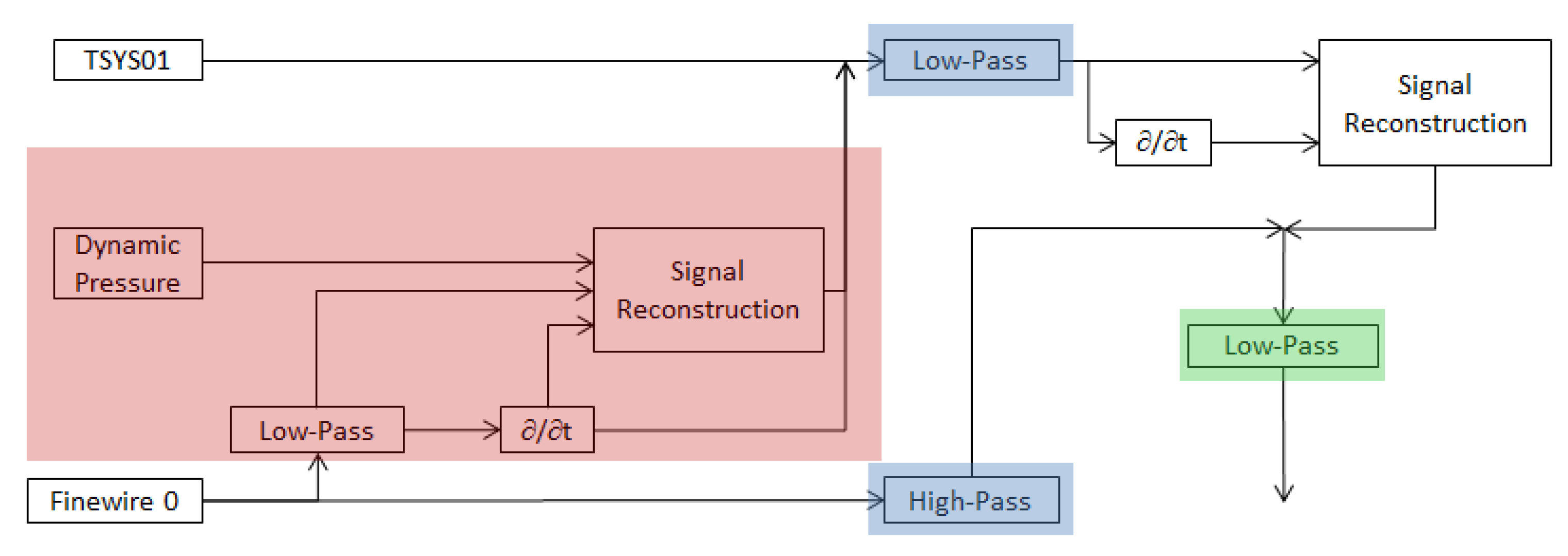
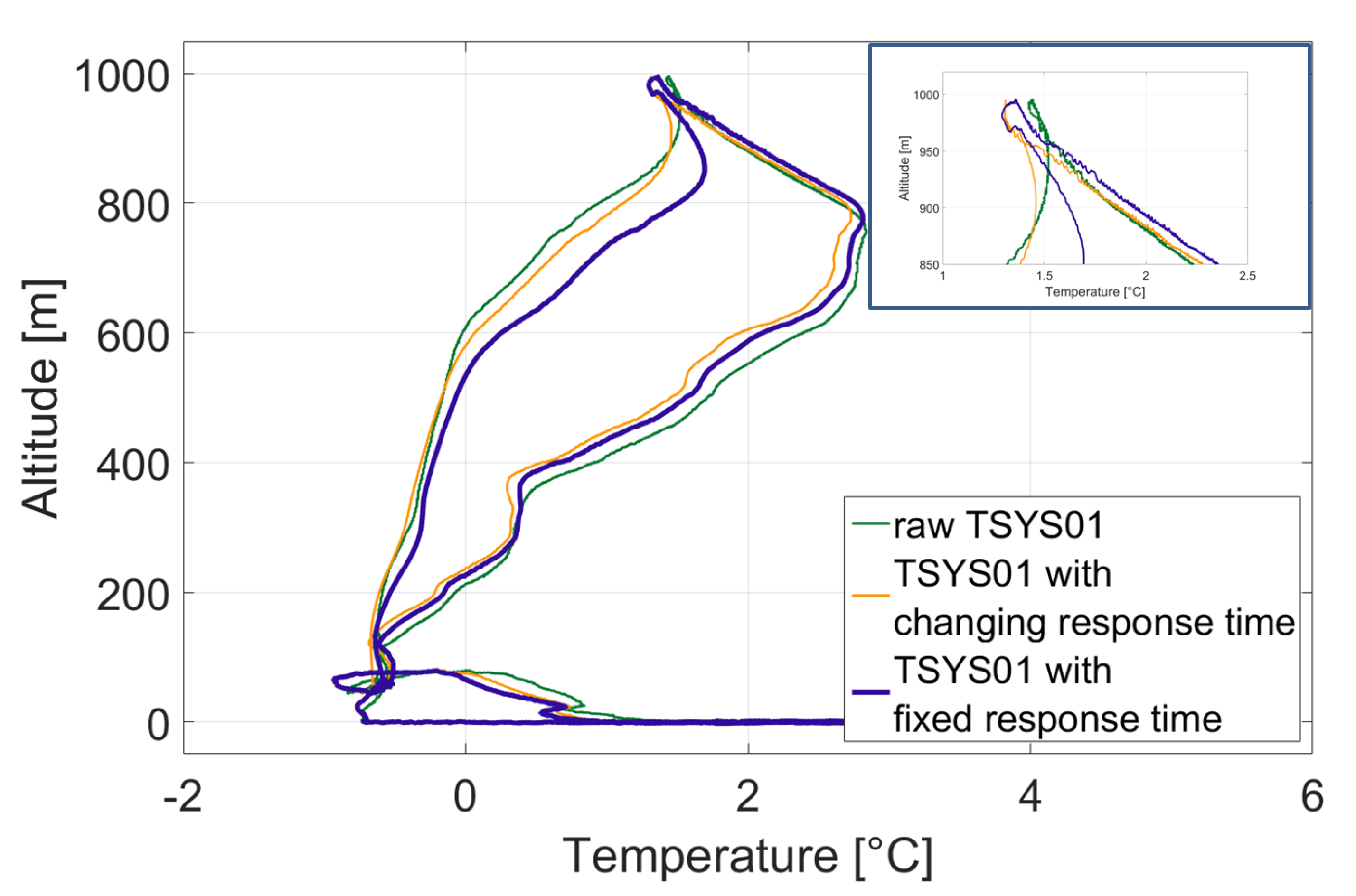
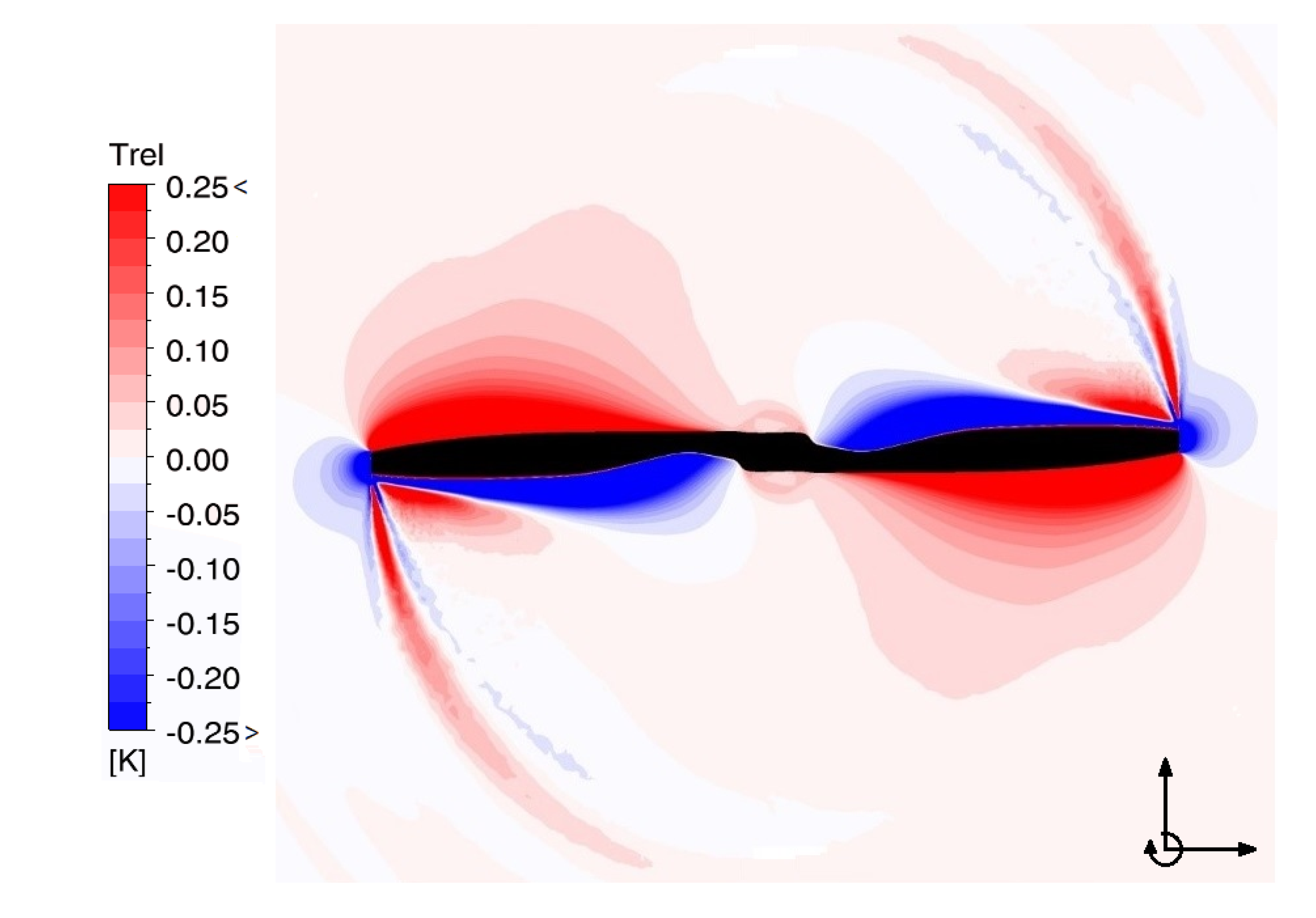
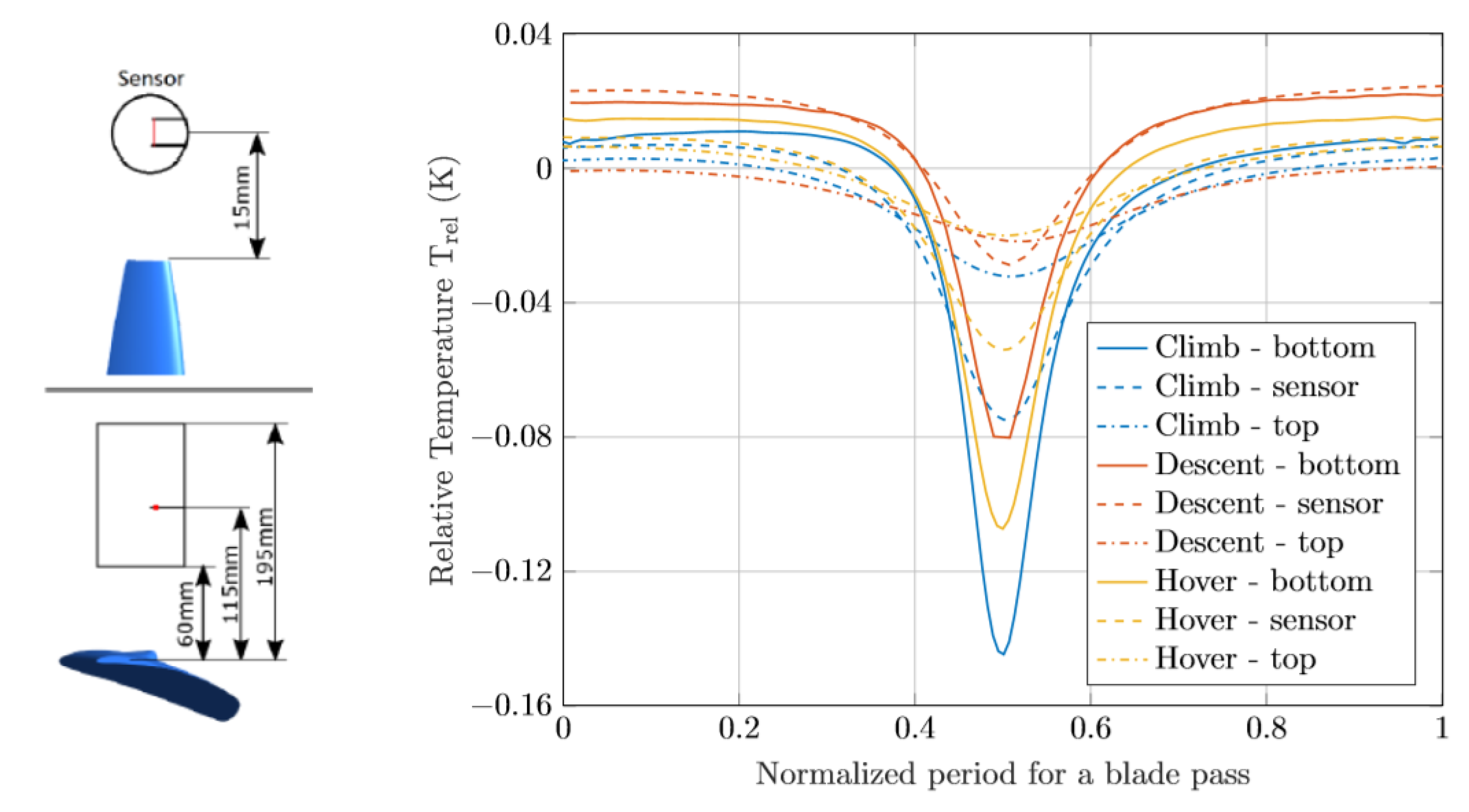
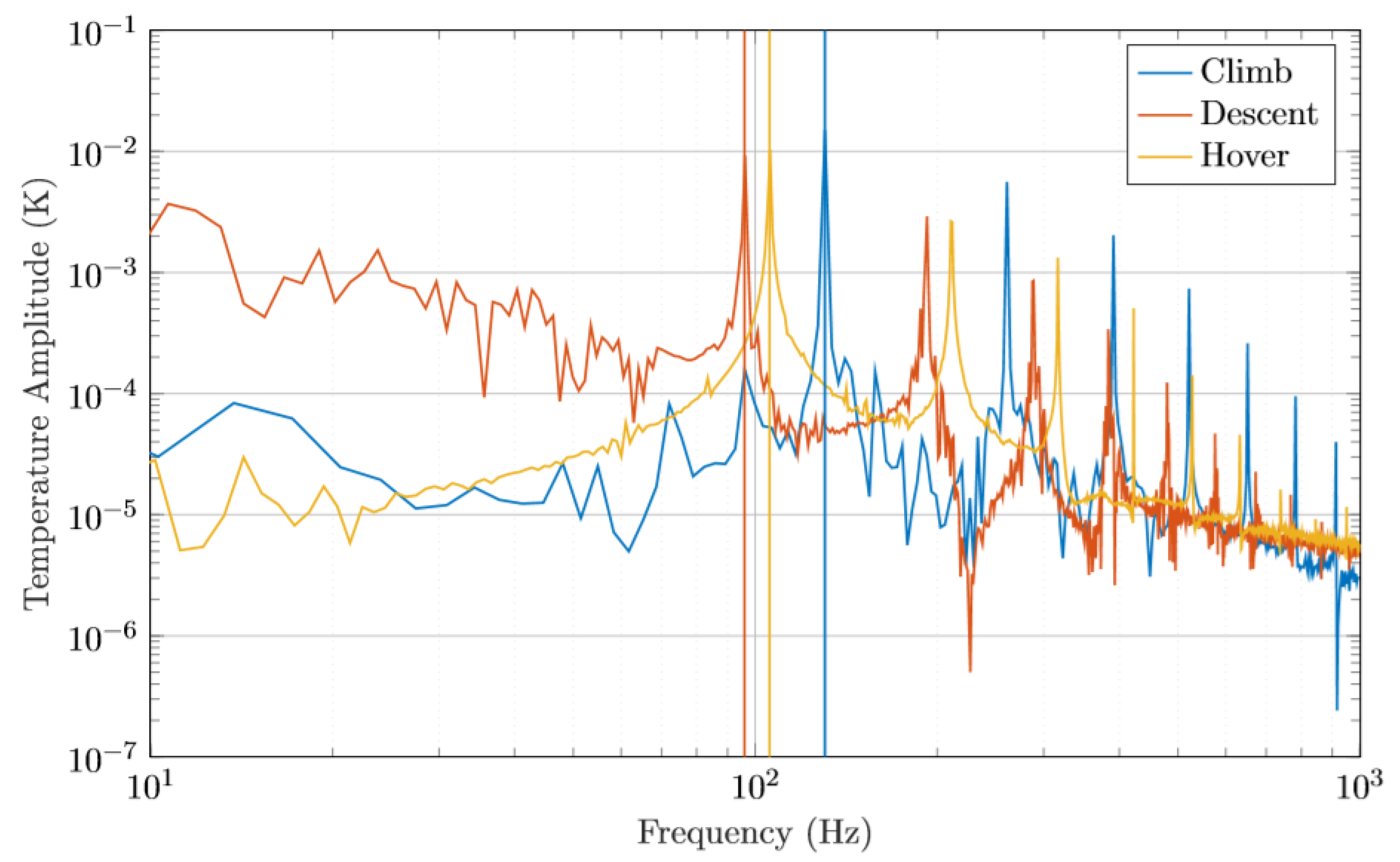
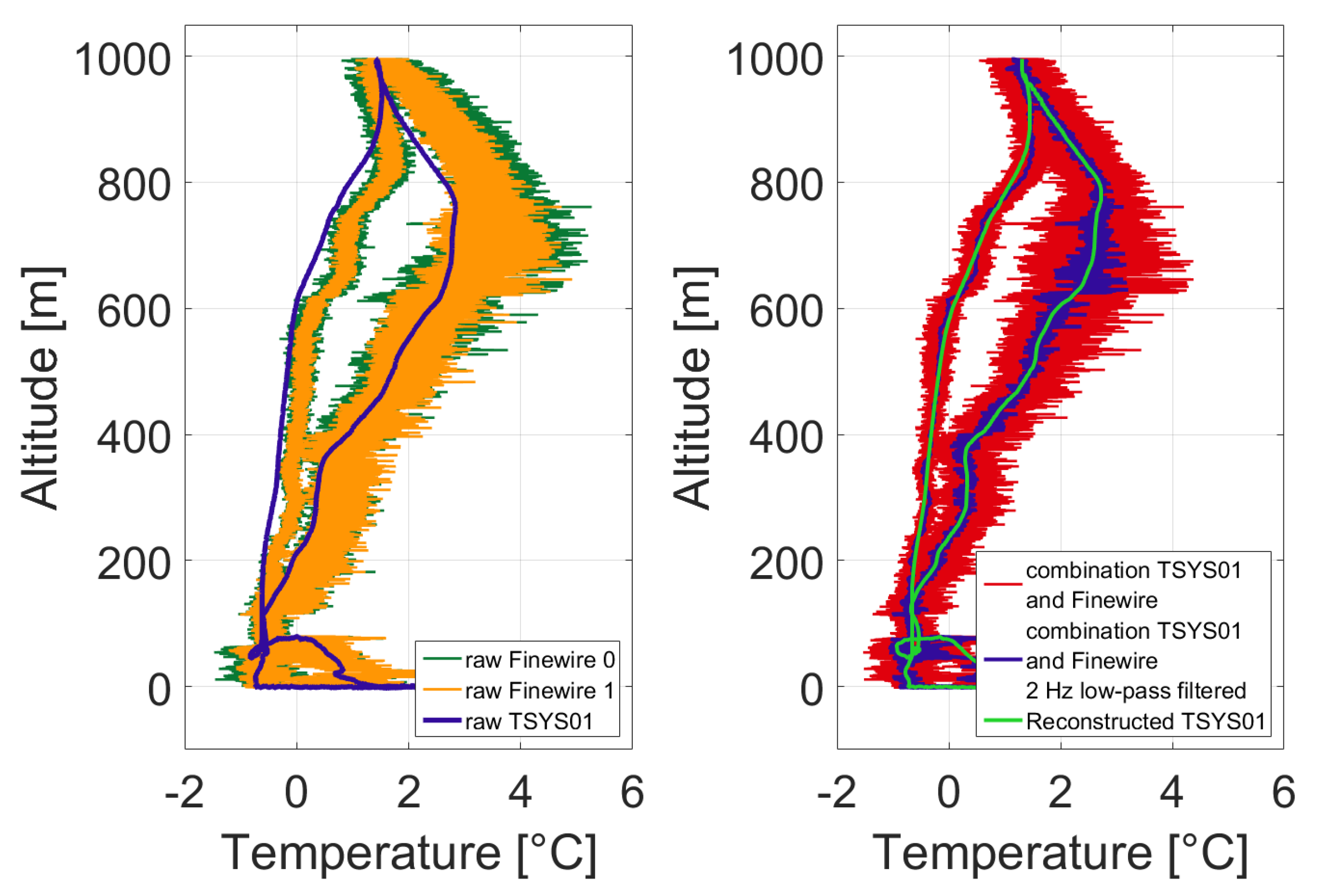
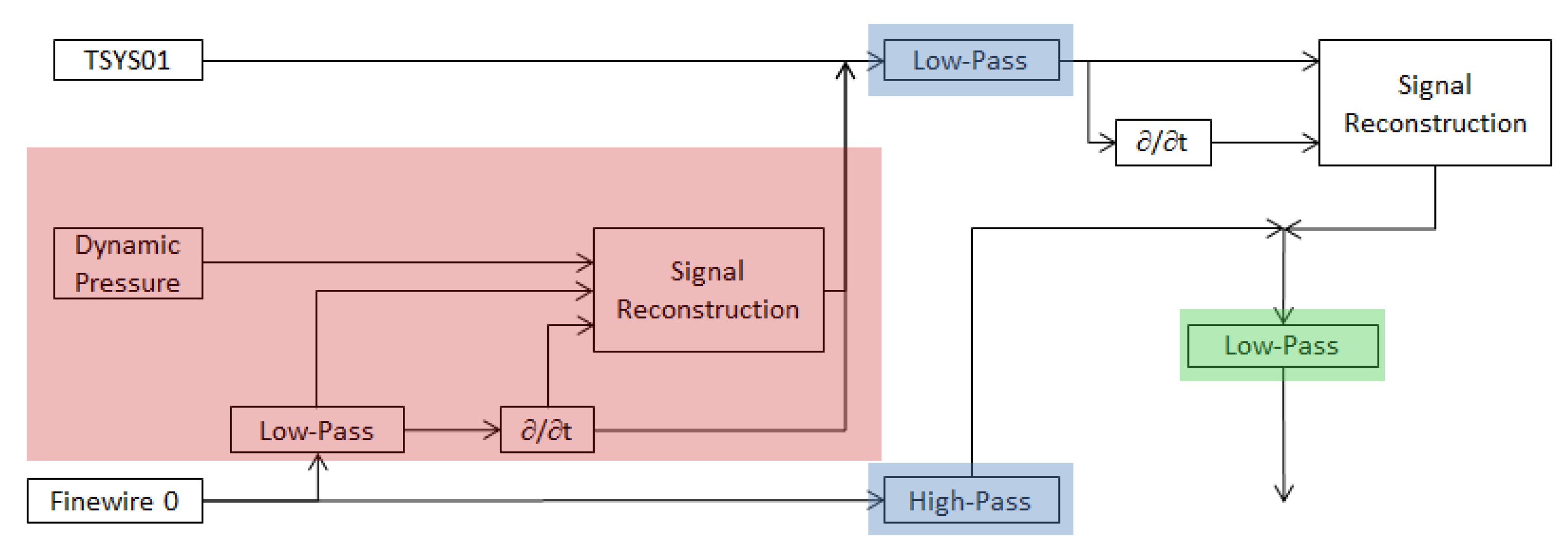
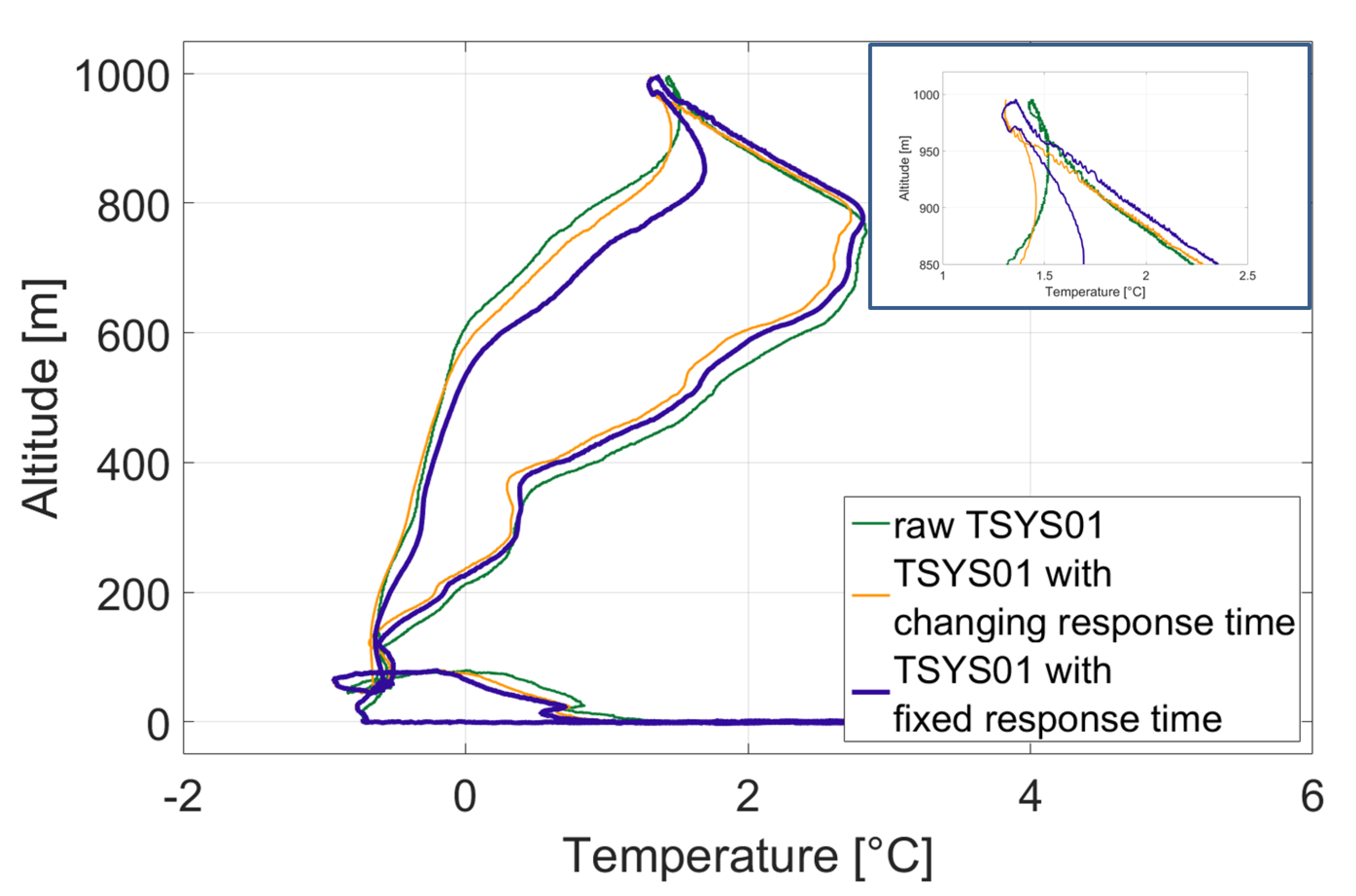
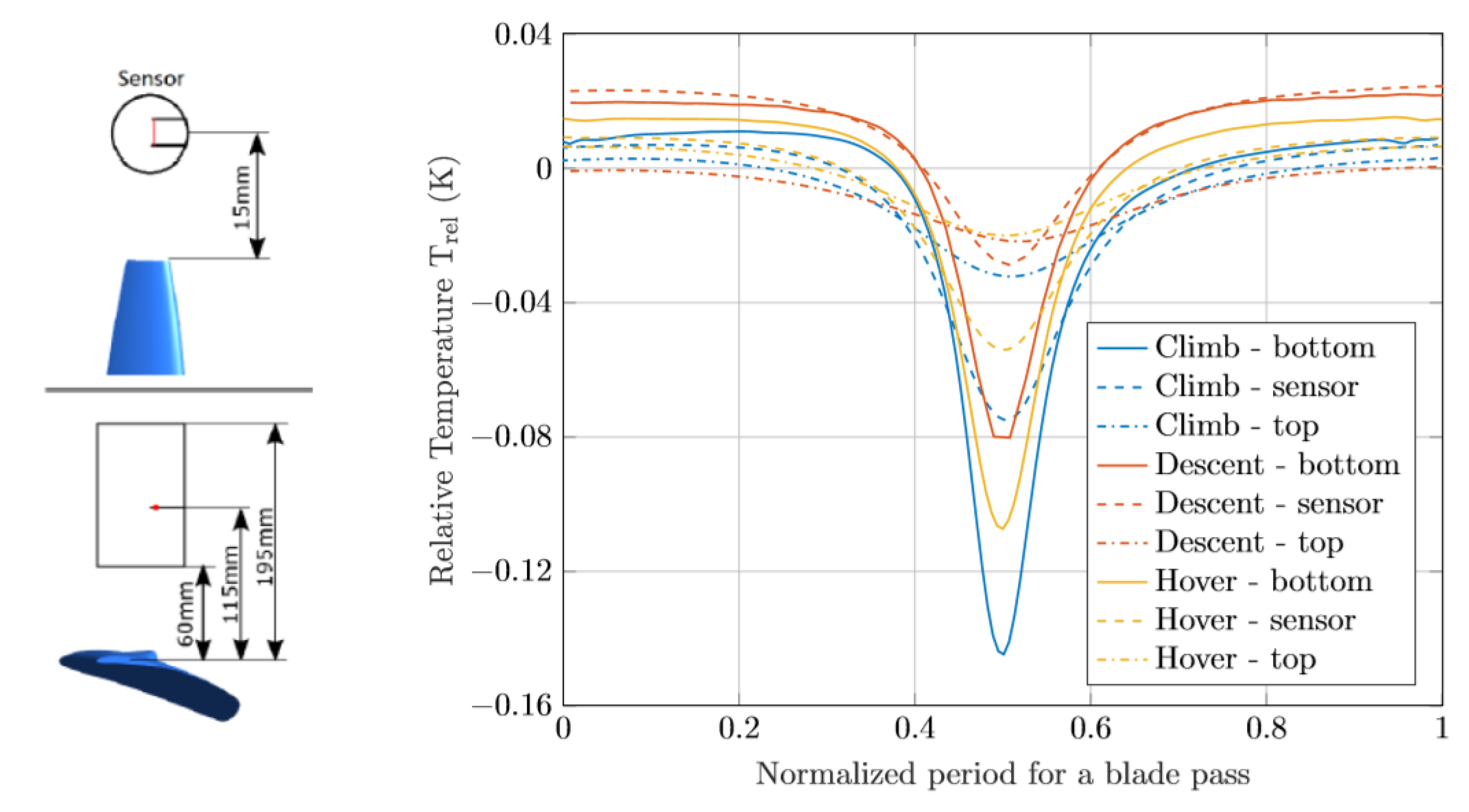
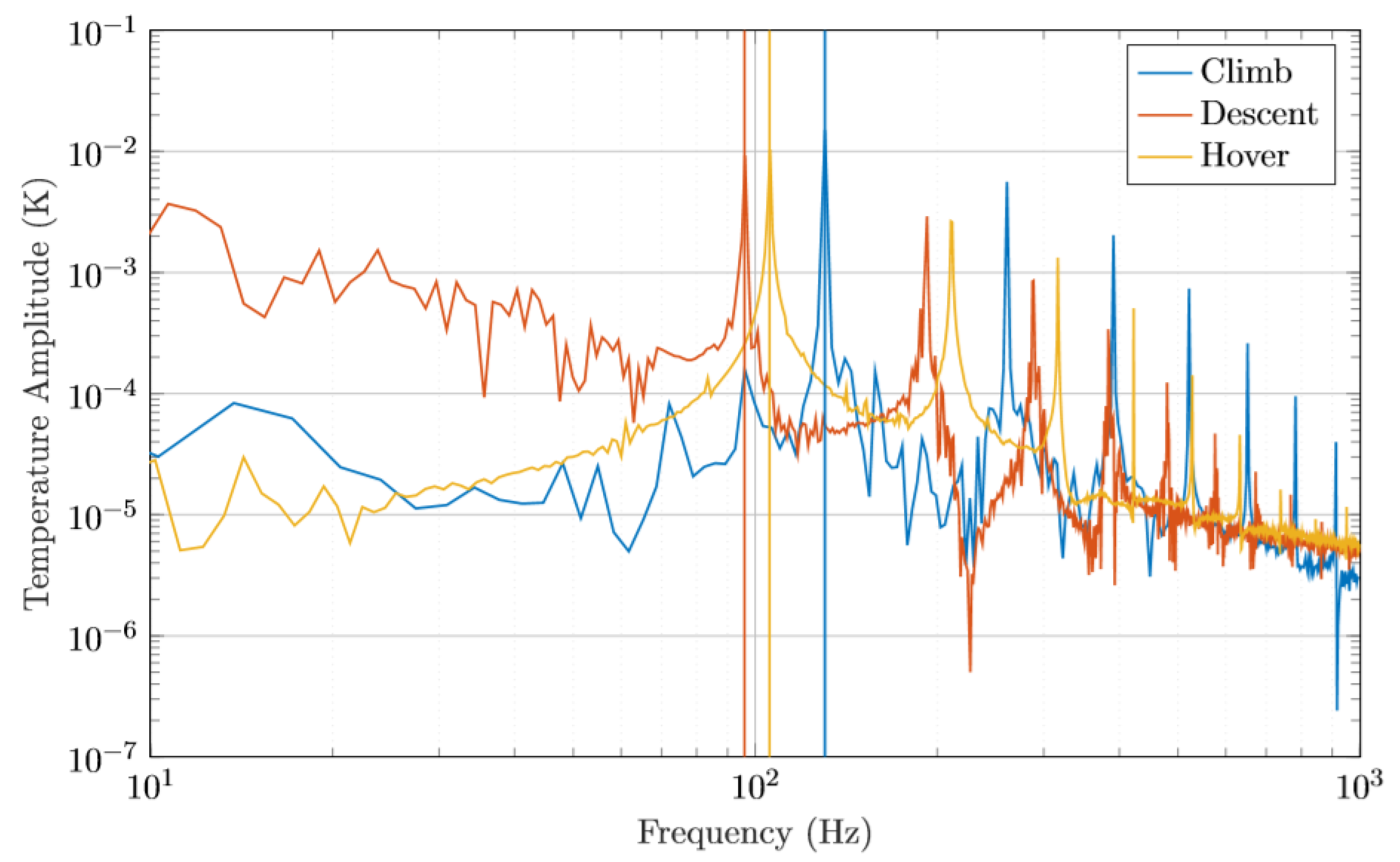
3.4. Impact of Rotor Blades on Quadrocopter Measurements and Data Processing (ALICE)
3.4.1. Observations
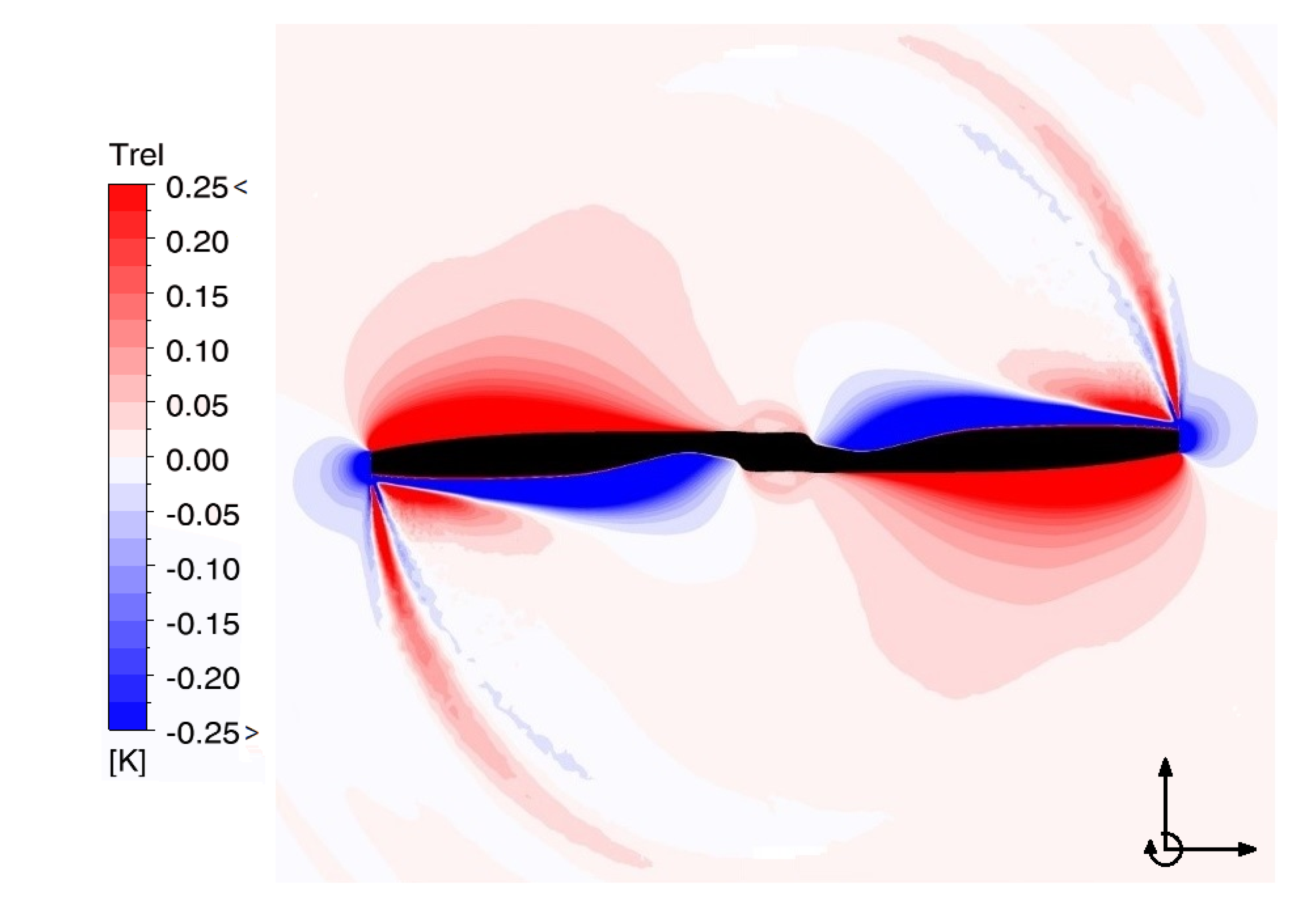
3.4.2. Simulations
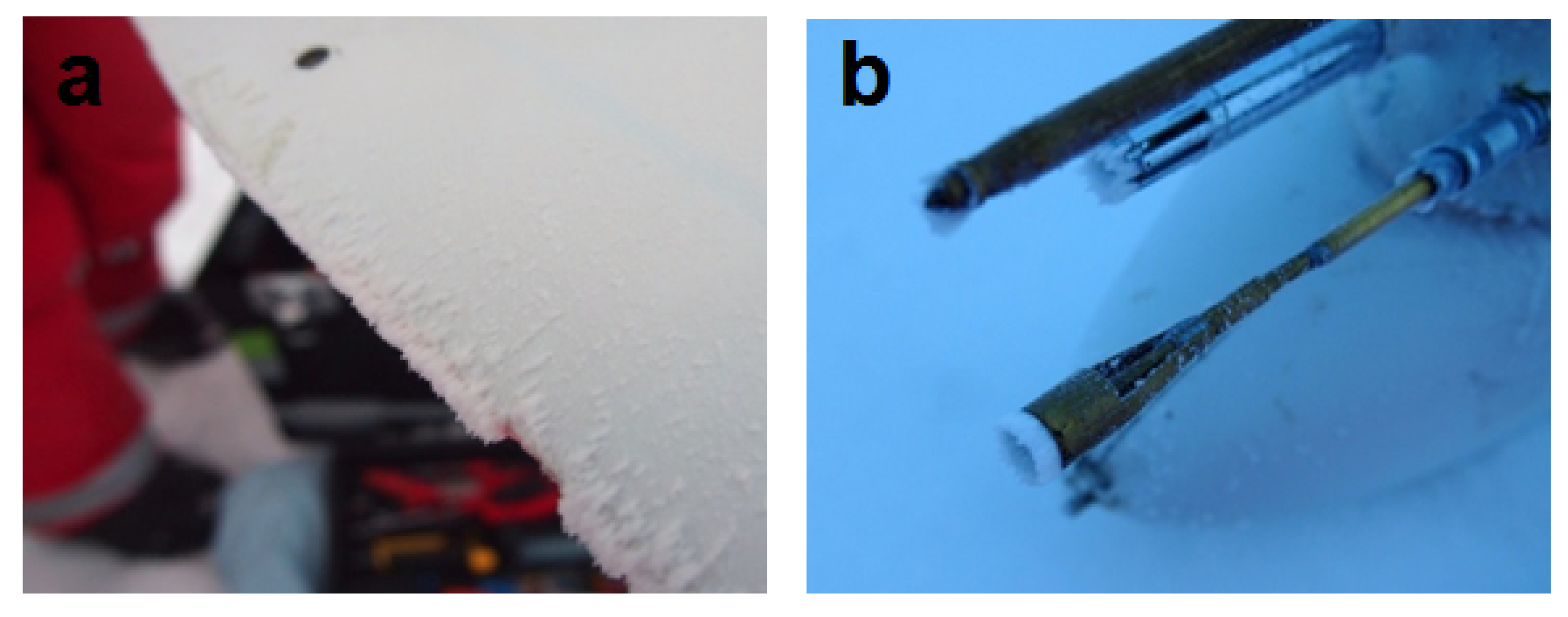
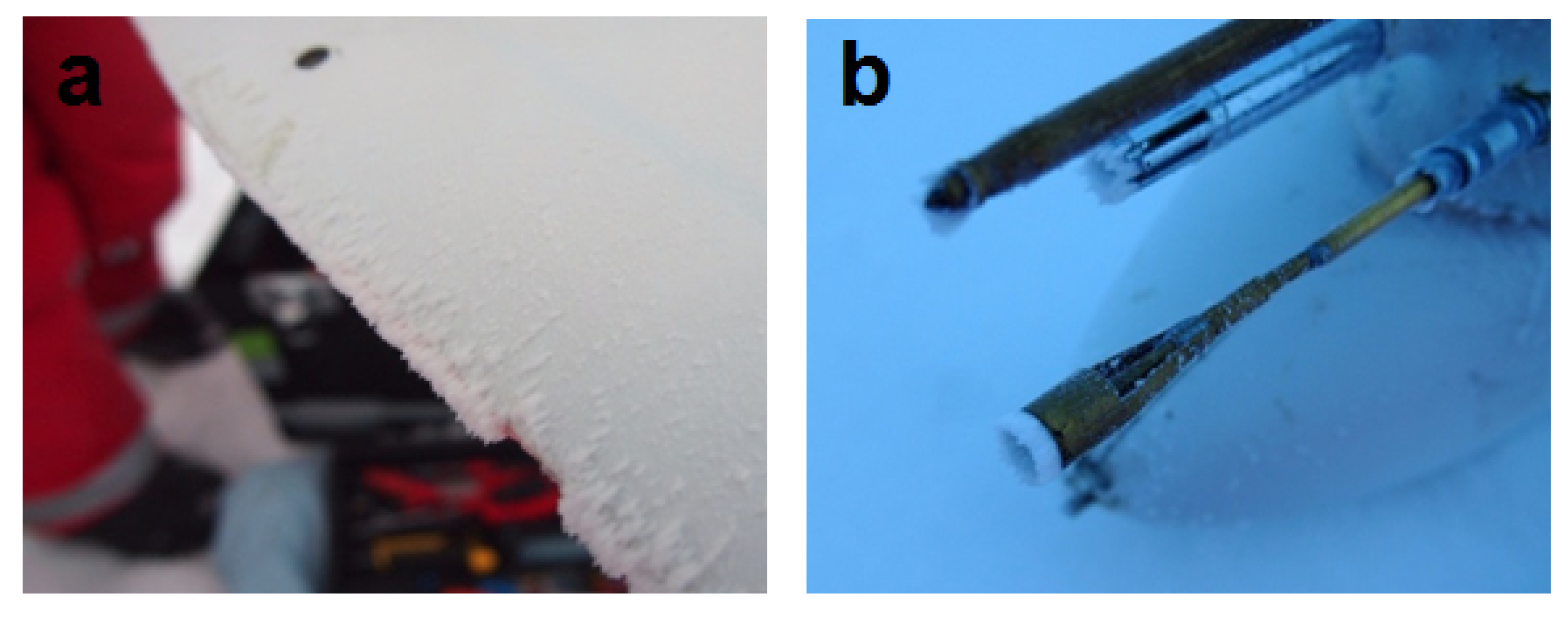
3.5. Icing (MAV)
4. Examples of Specific Scientific Applications of UAS in Polar Areas
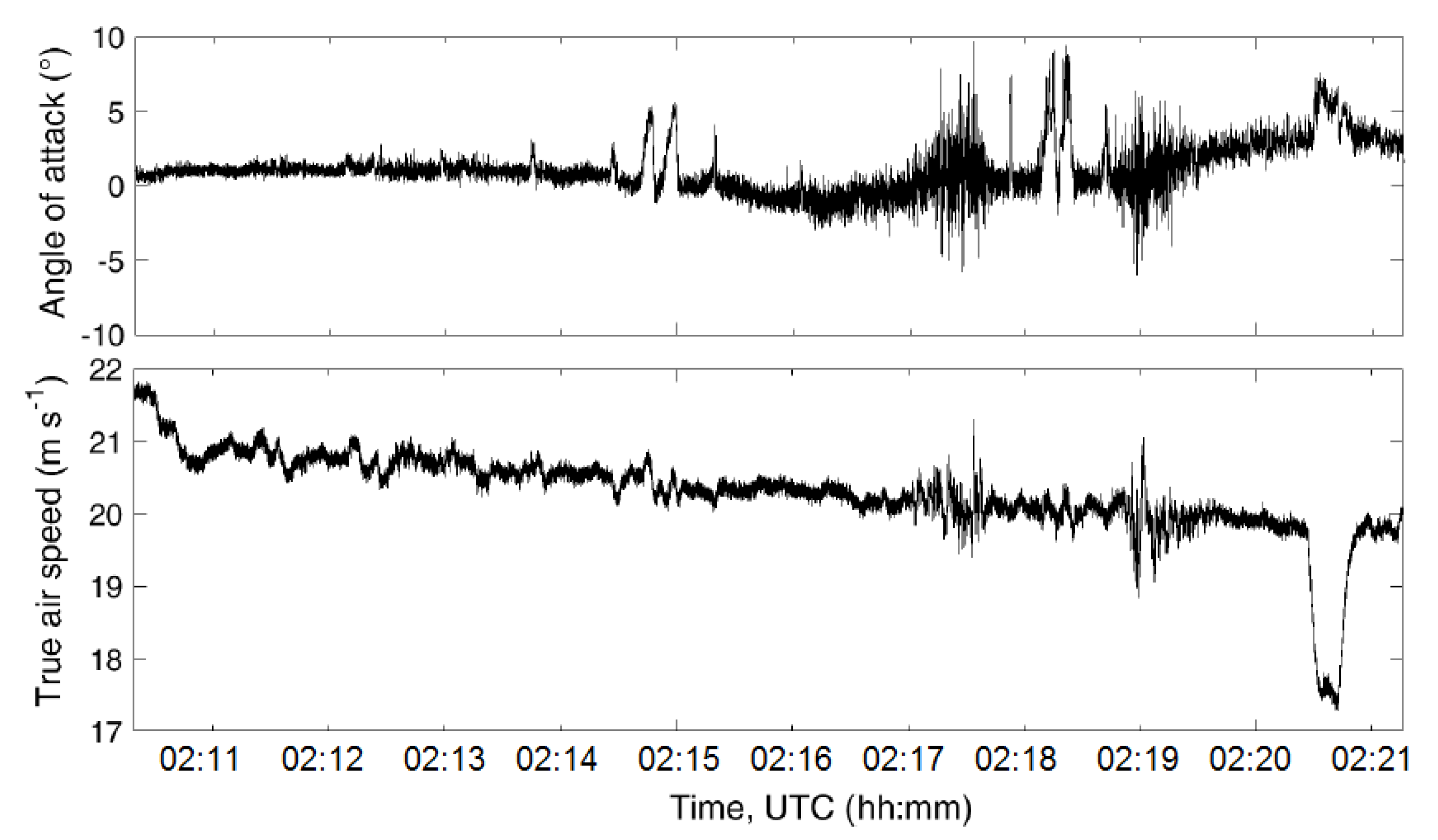
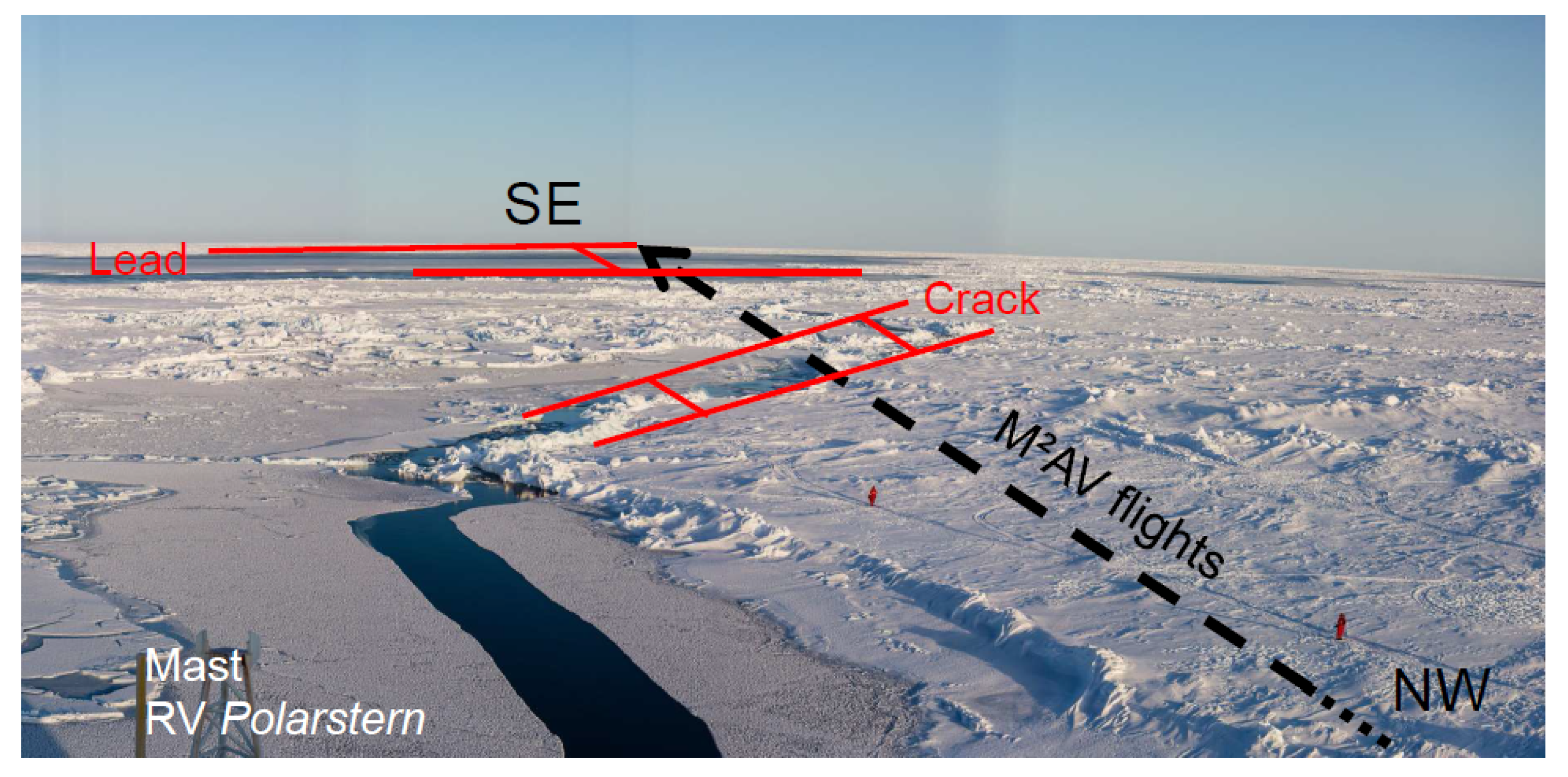
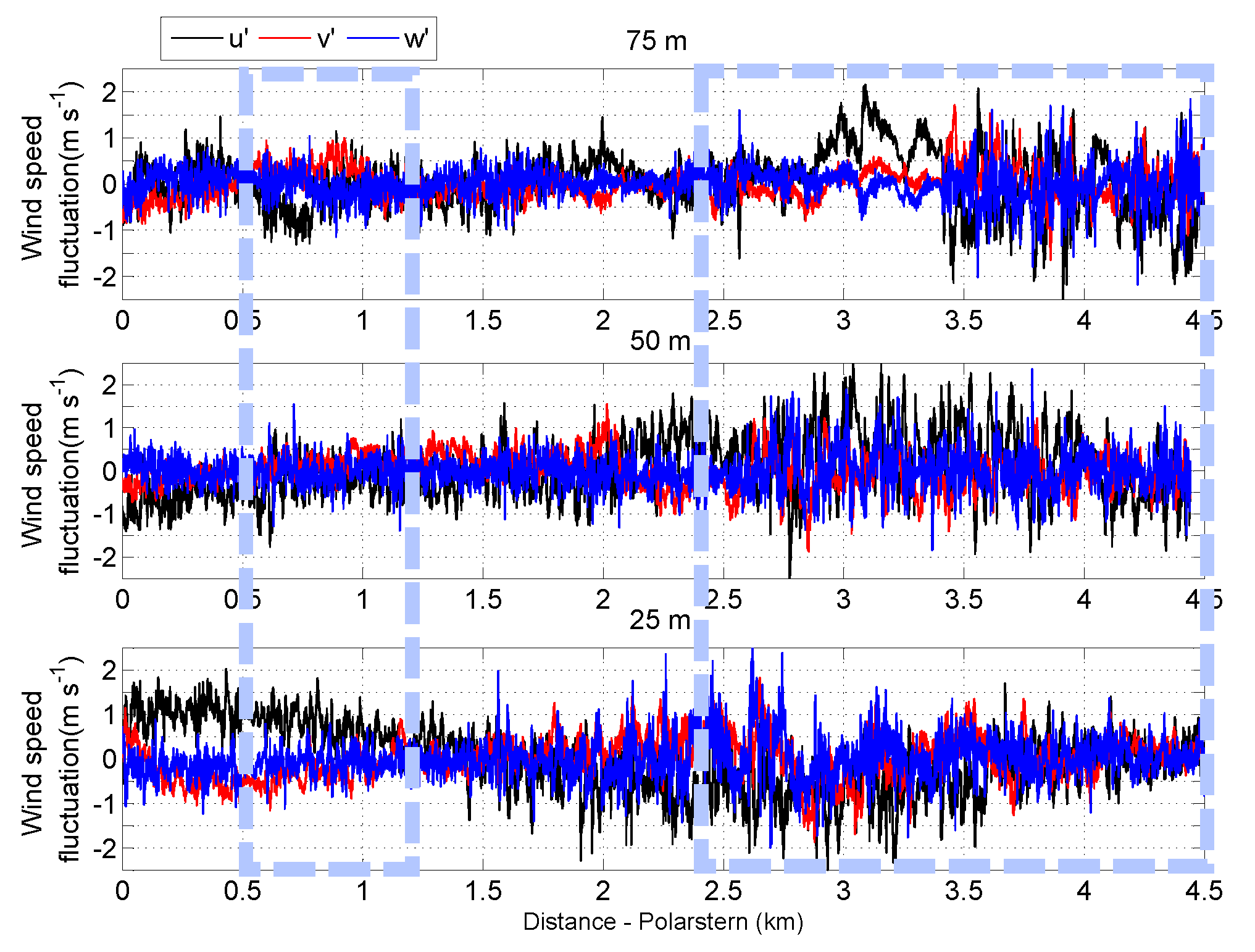
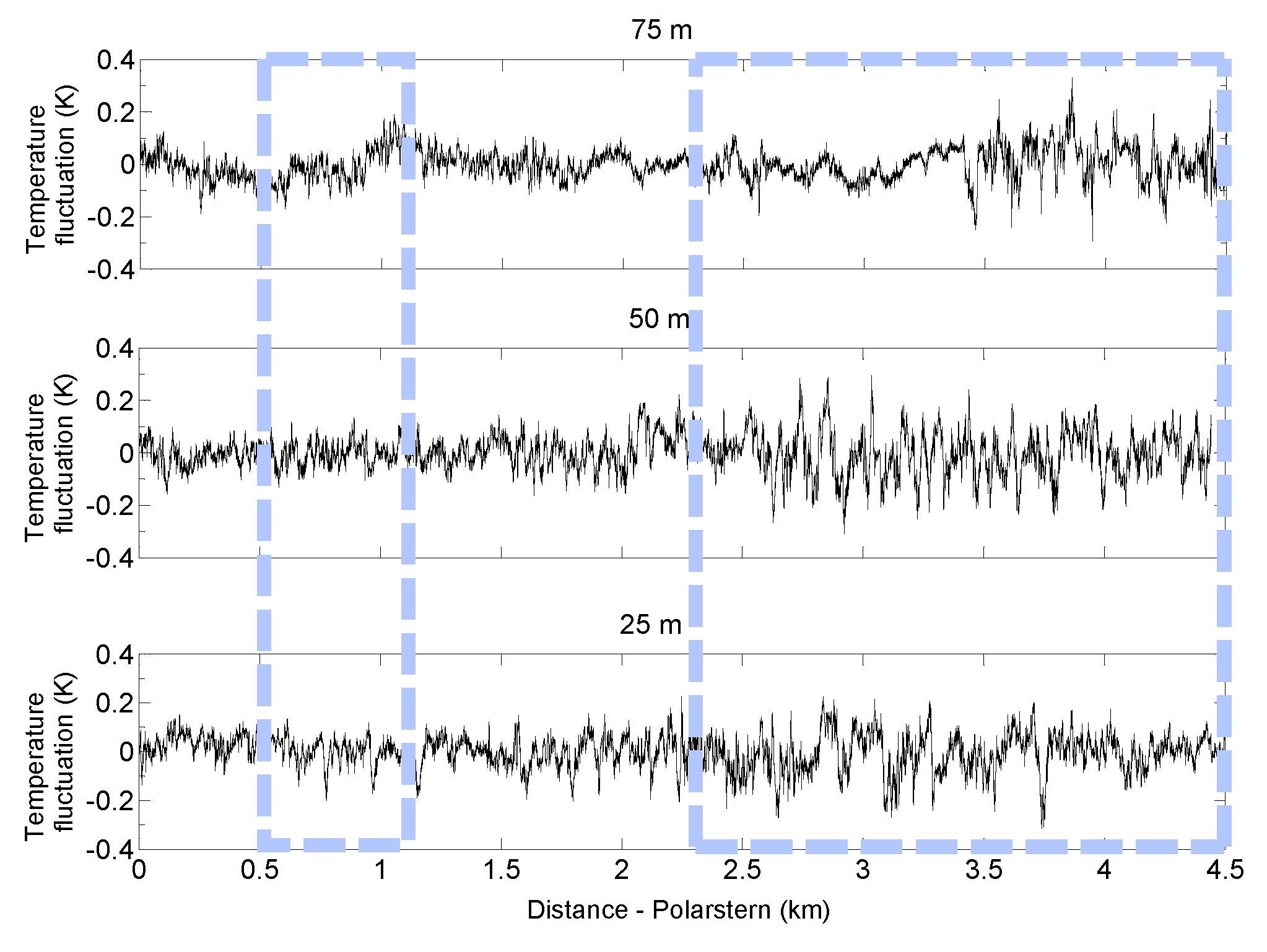
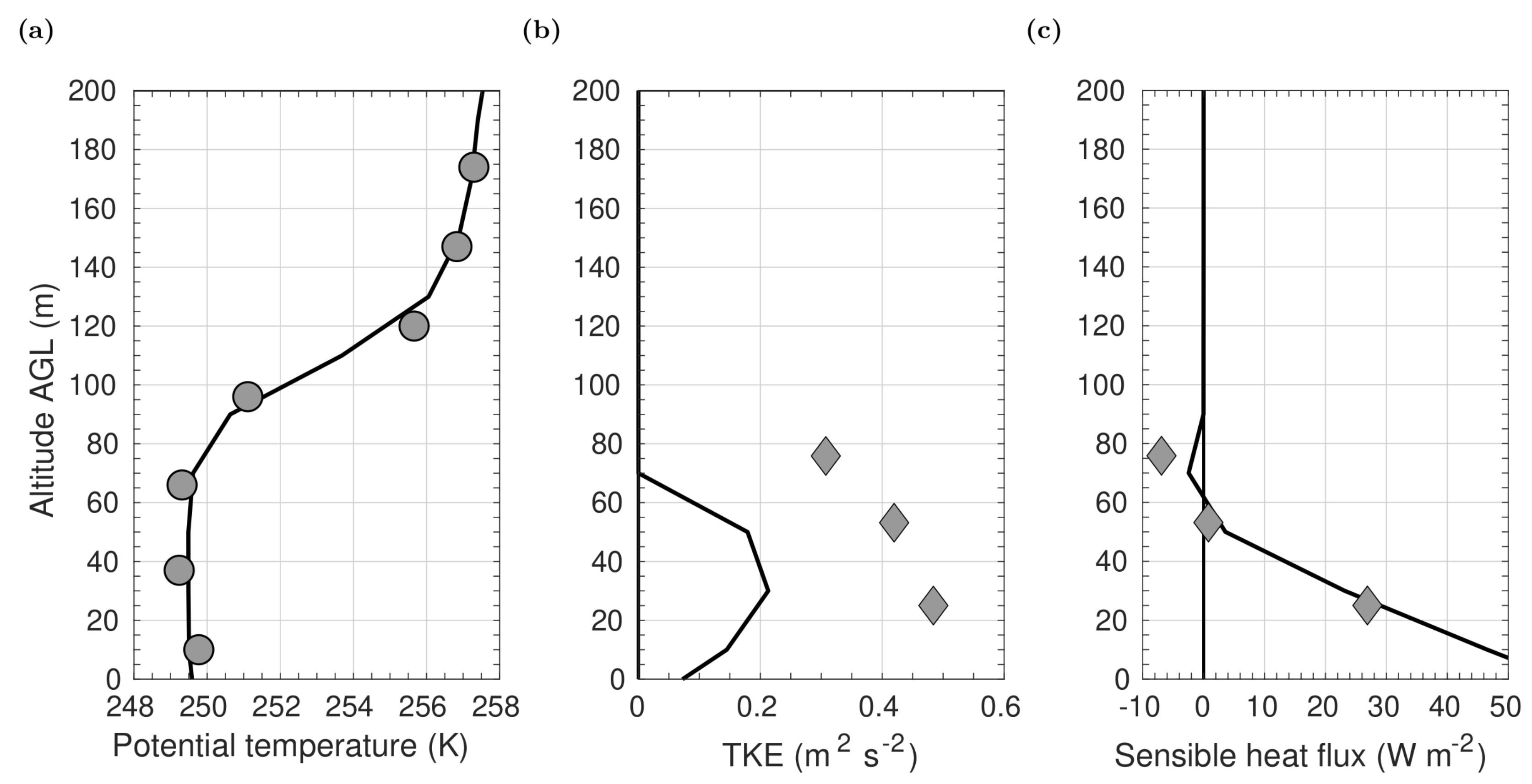
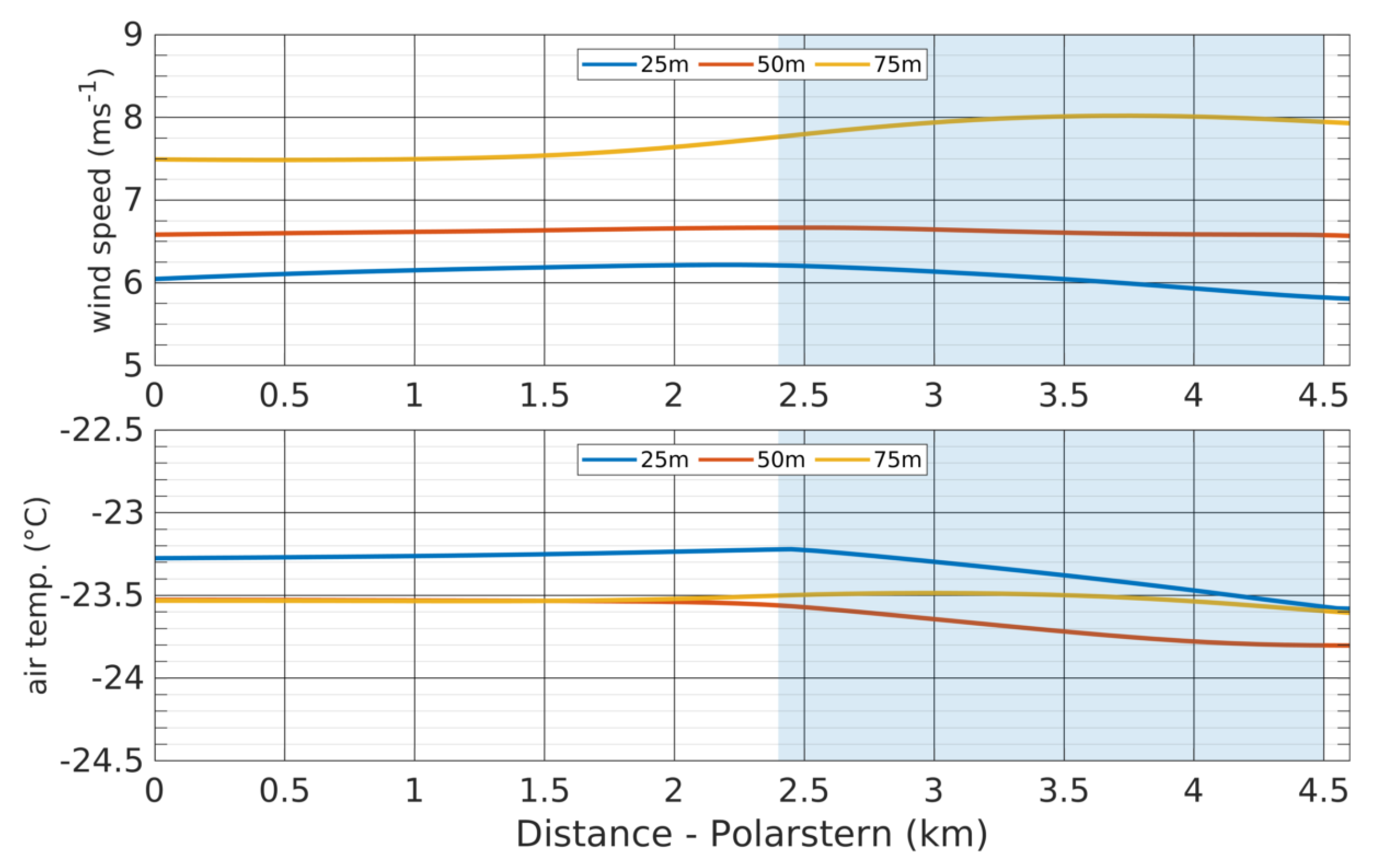
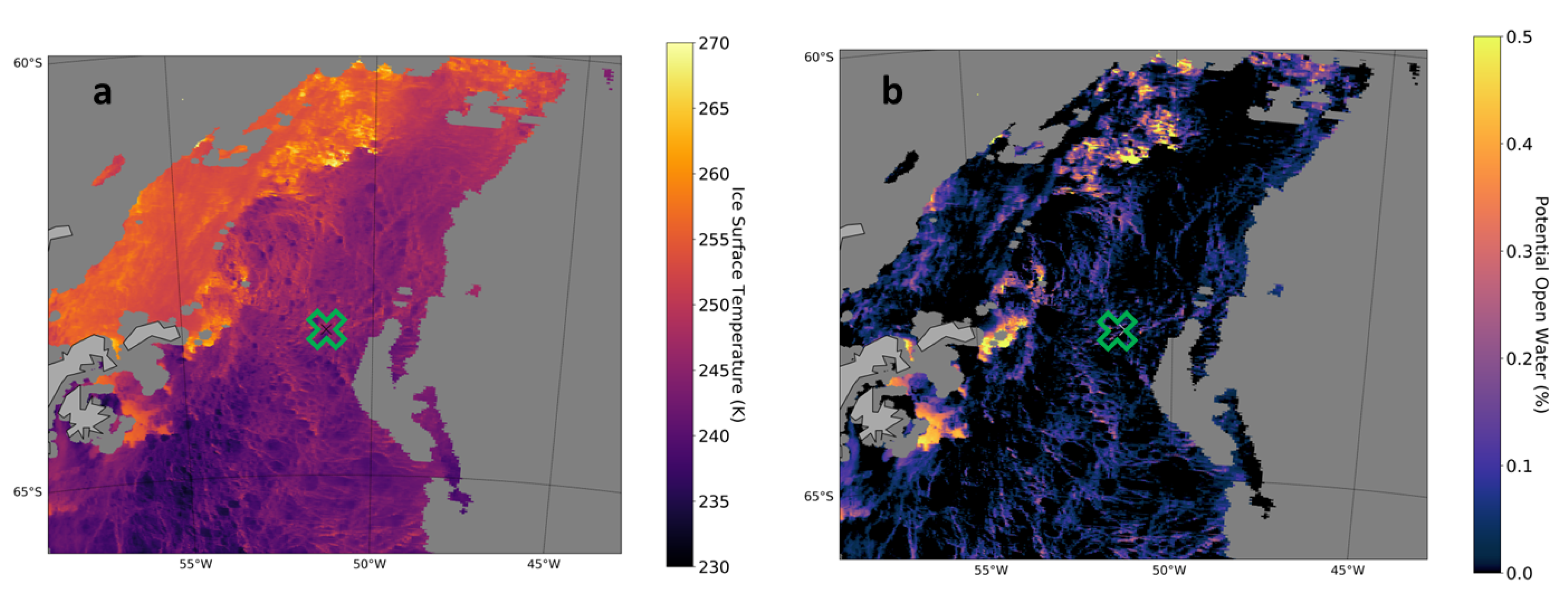
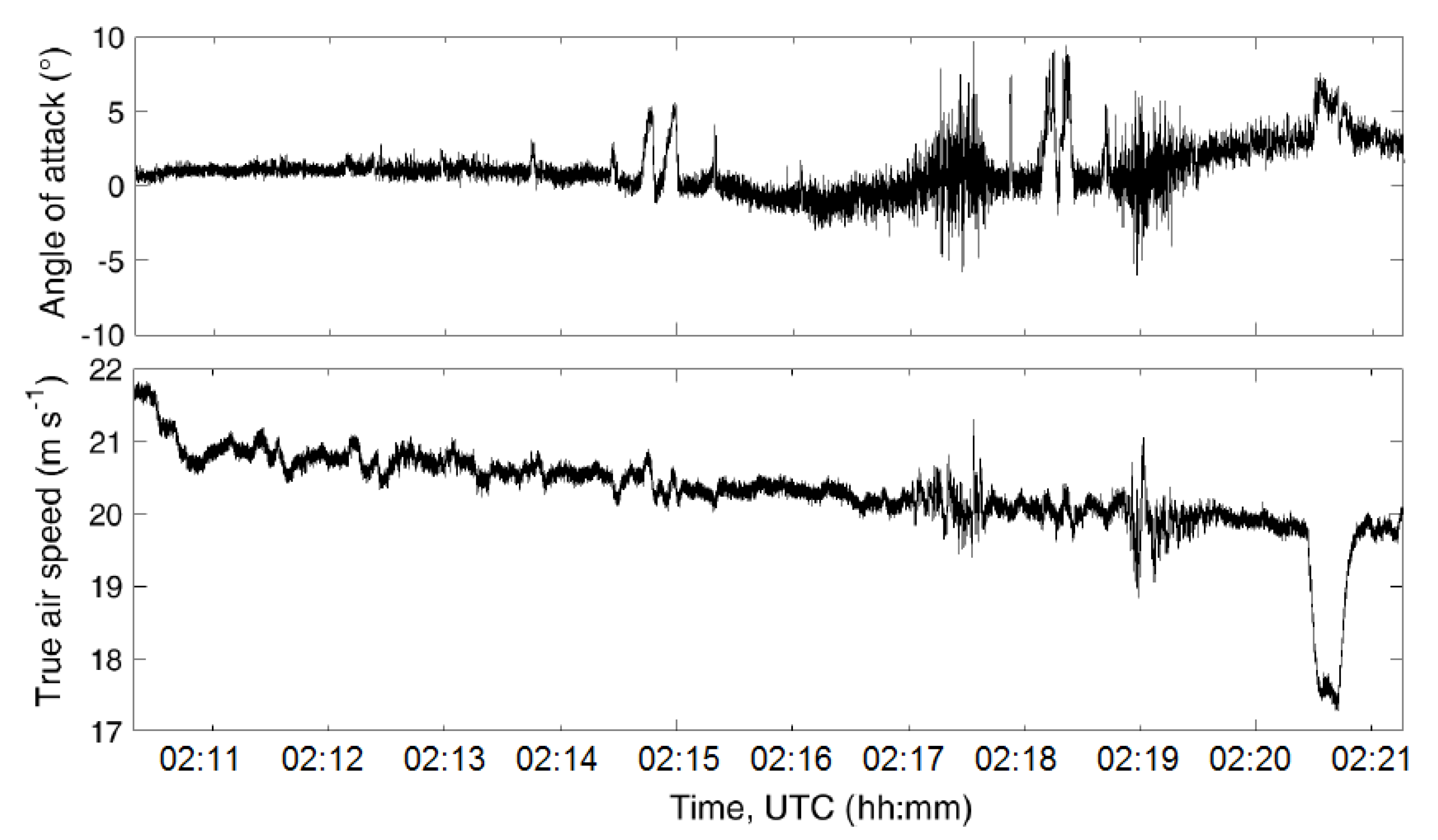
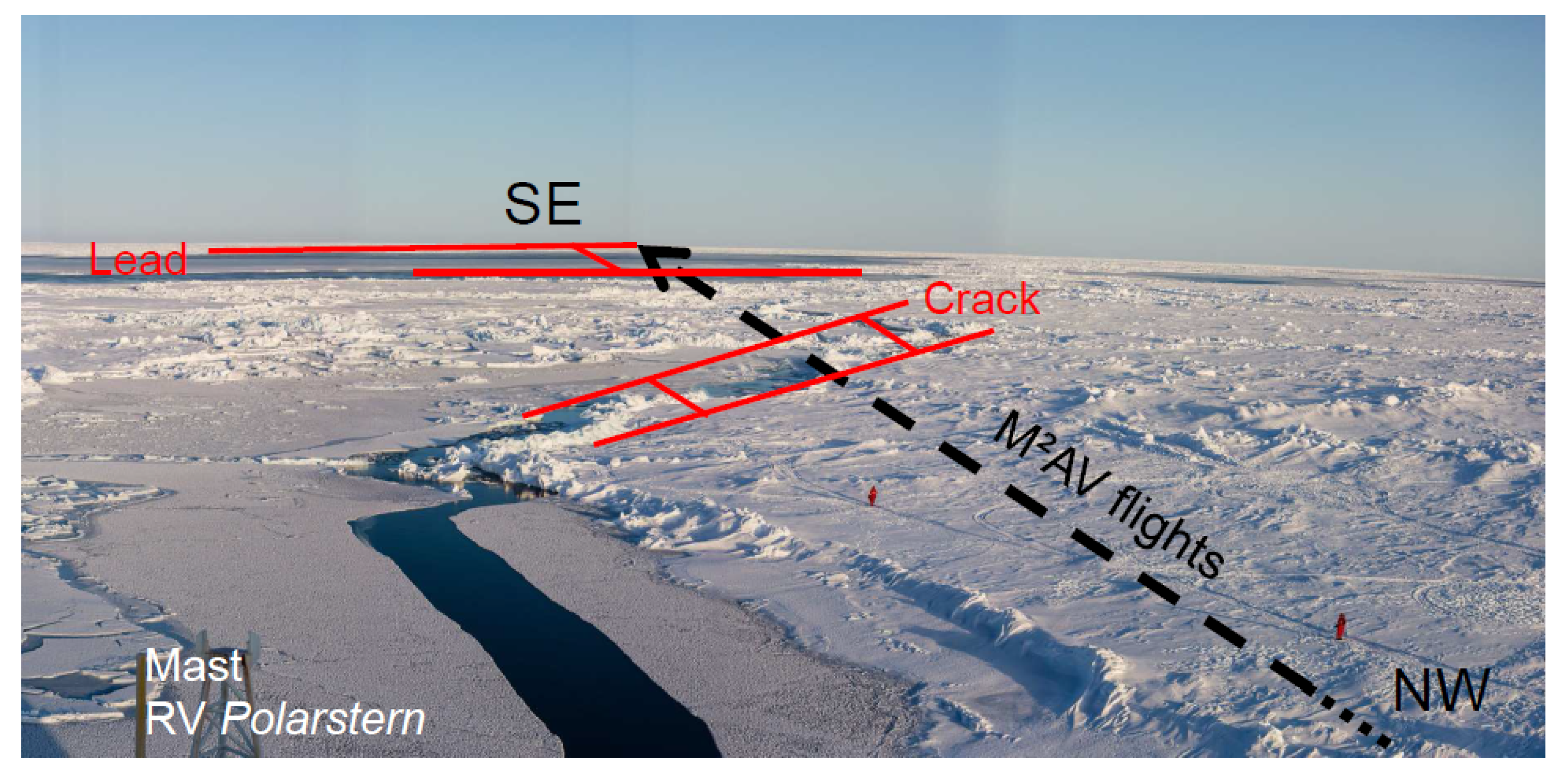
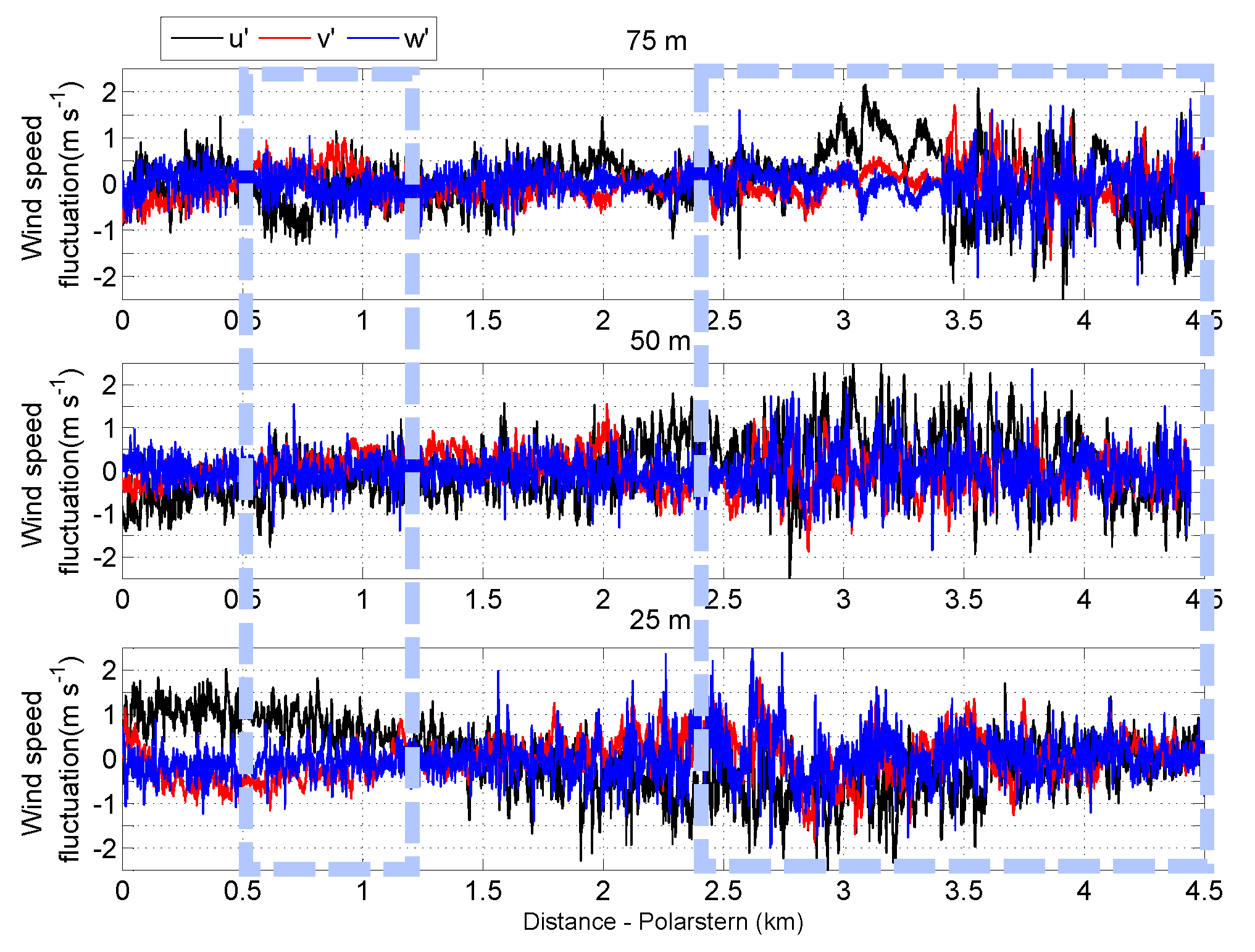
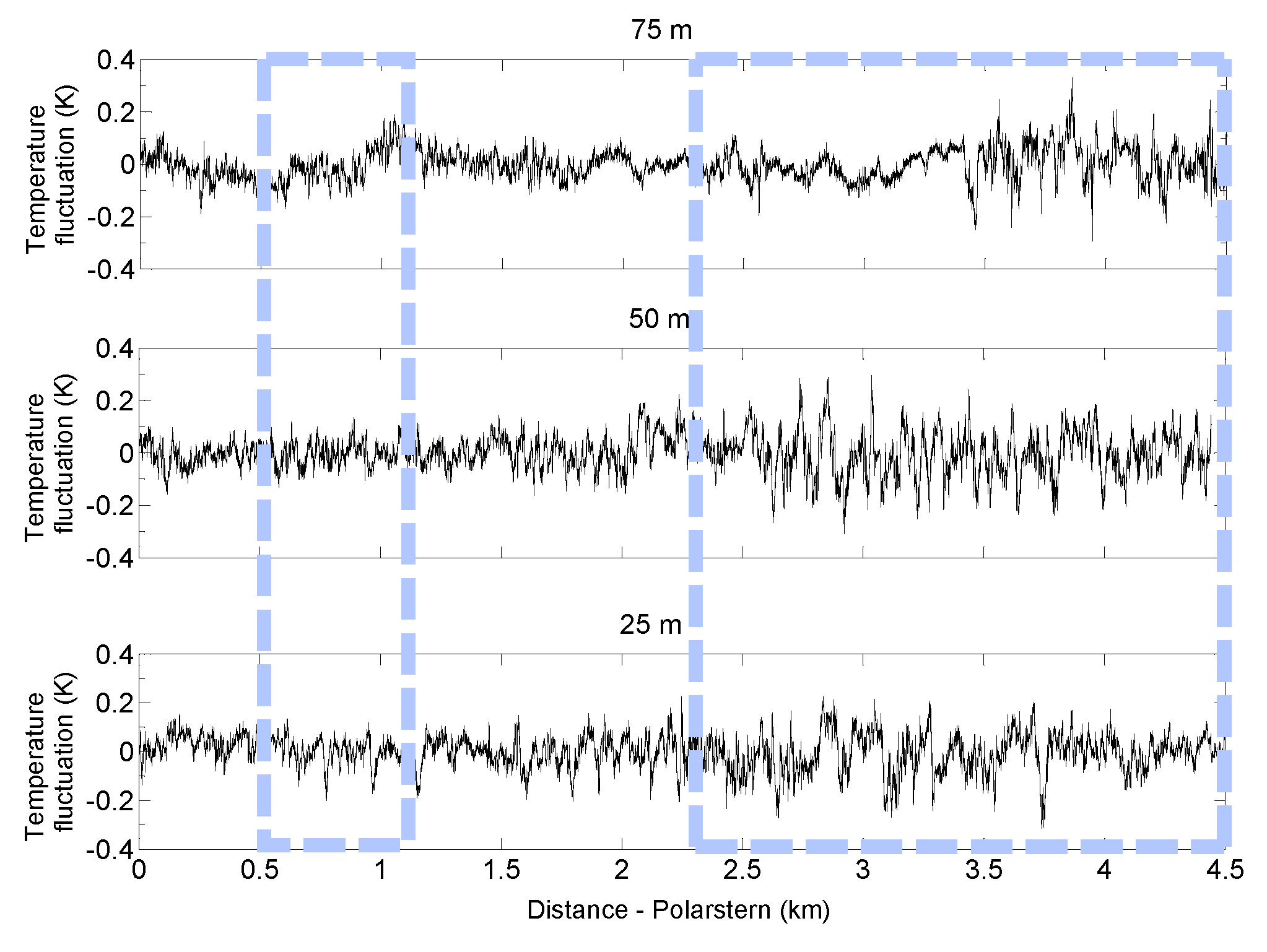
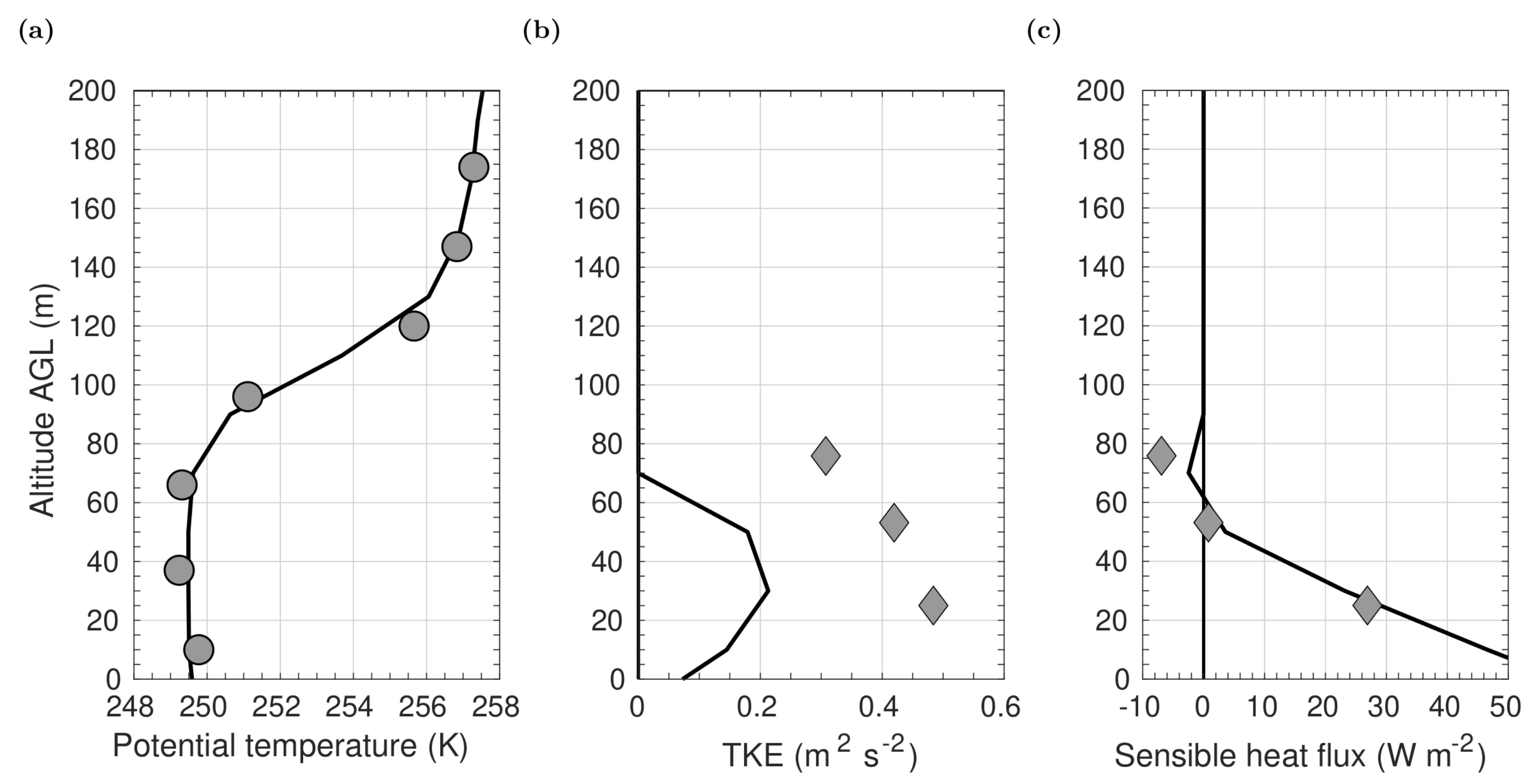
4.1. Temperature and Wind Fluctuations Observed above Open Water Sections (MAV)
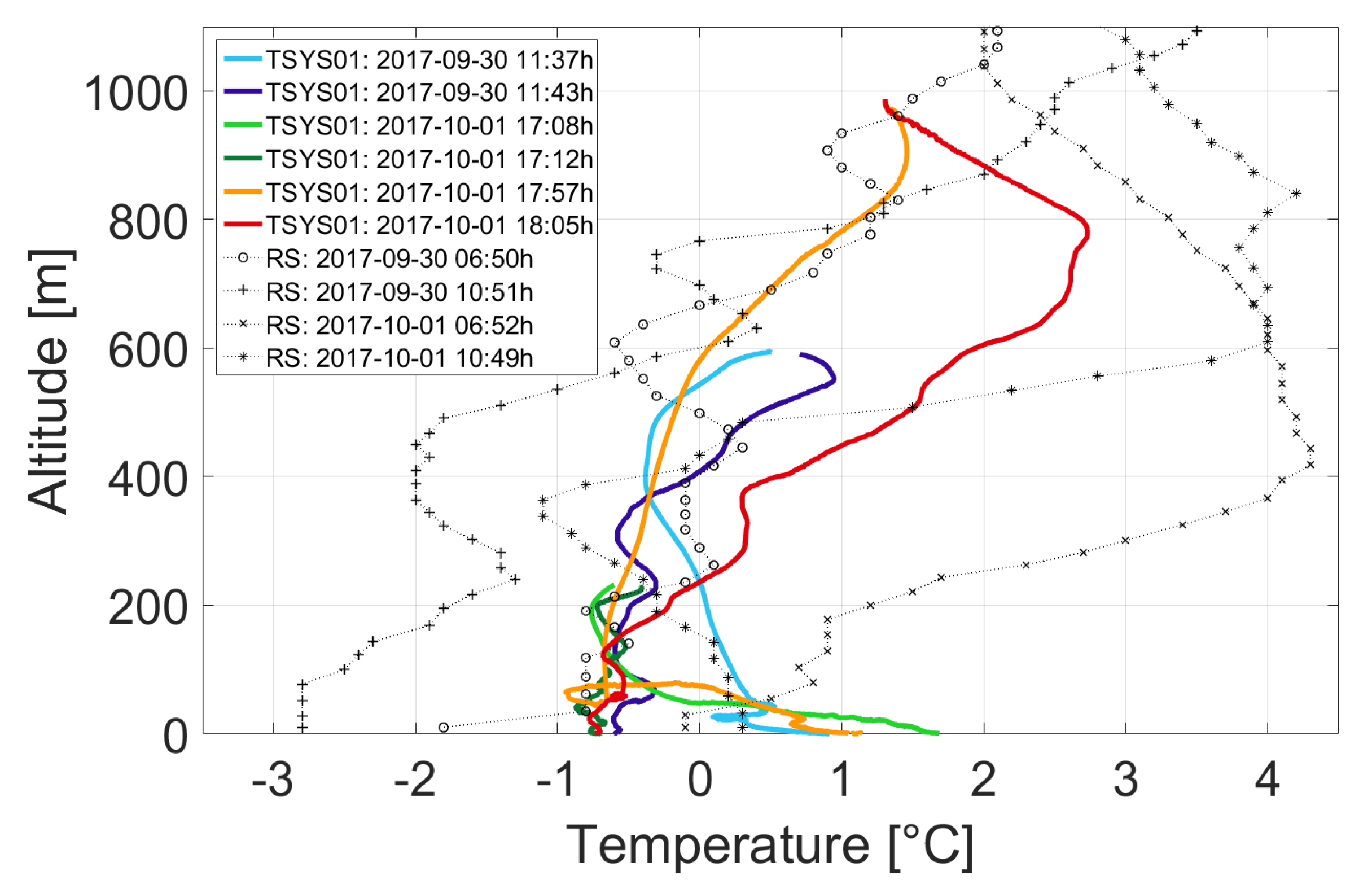
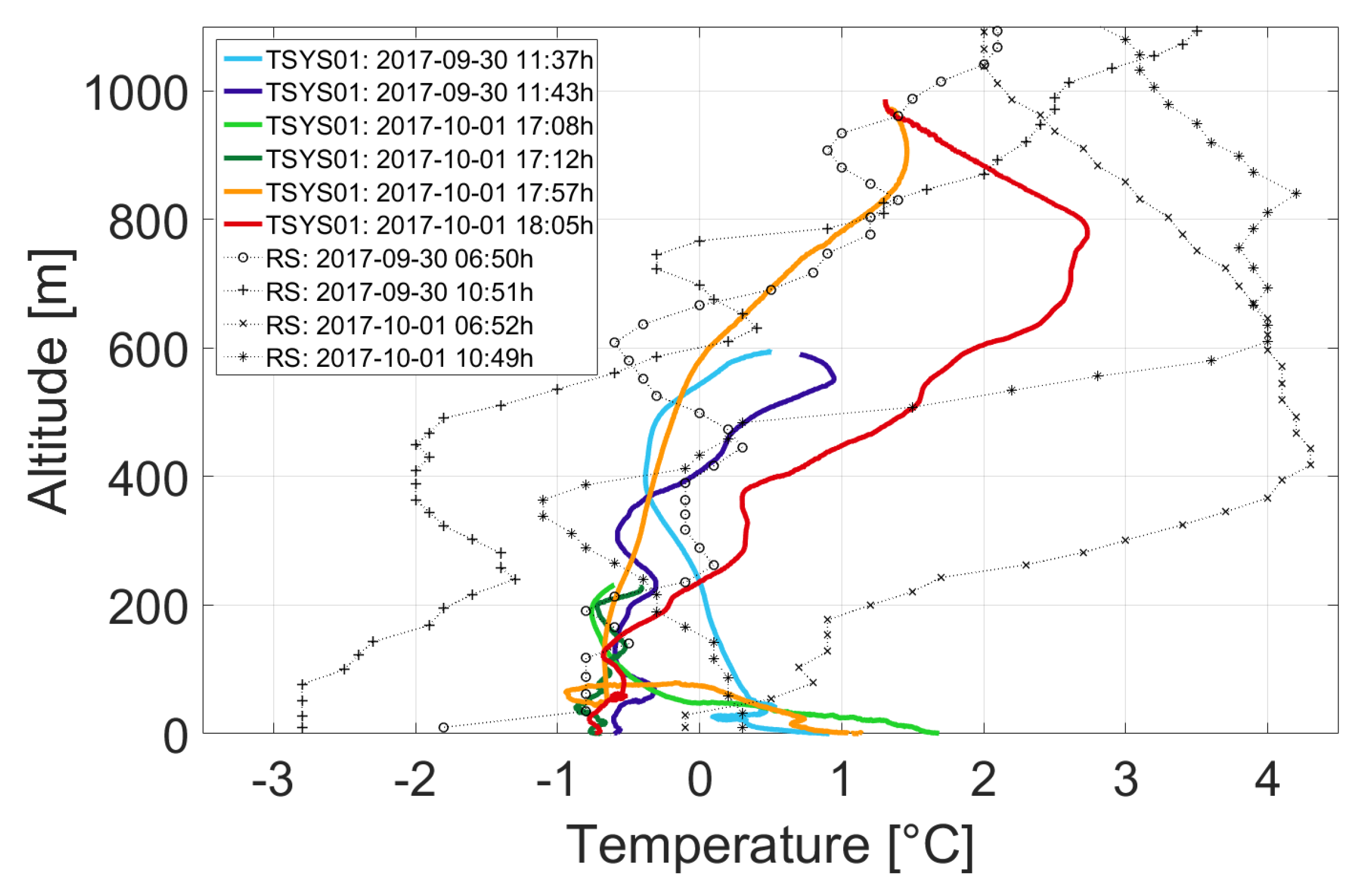
4.2. Meteorological Profiling from Research Vessel (ALICE)
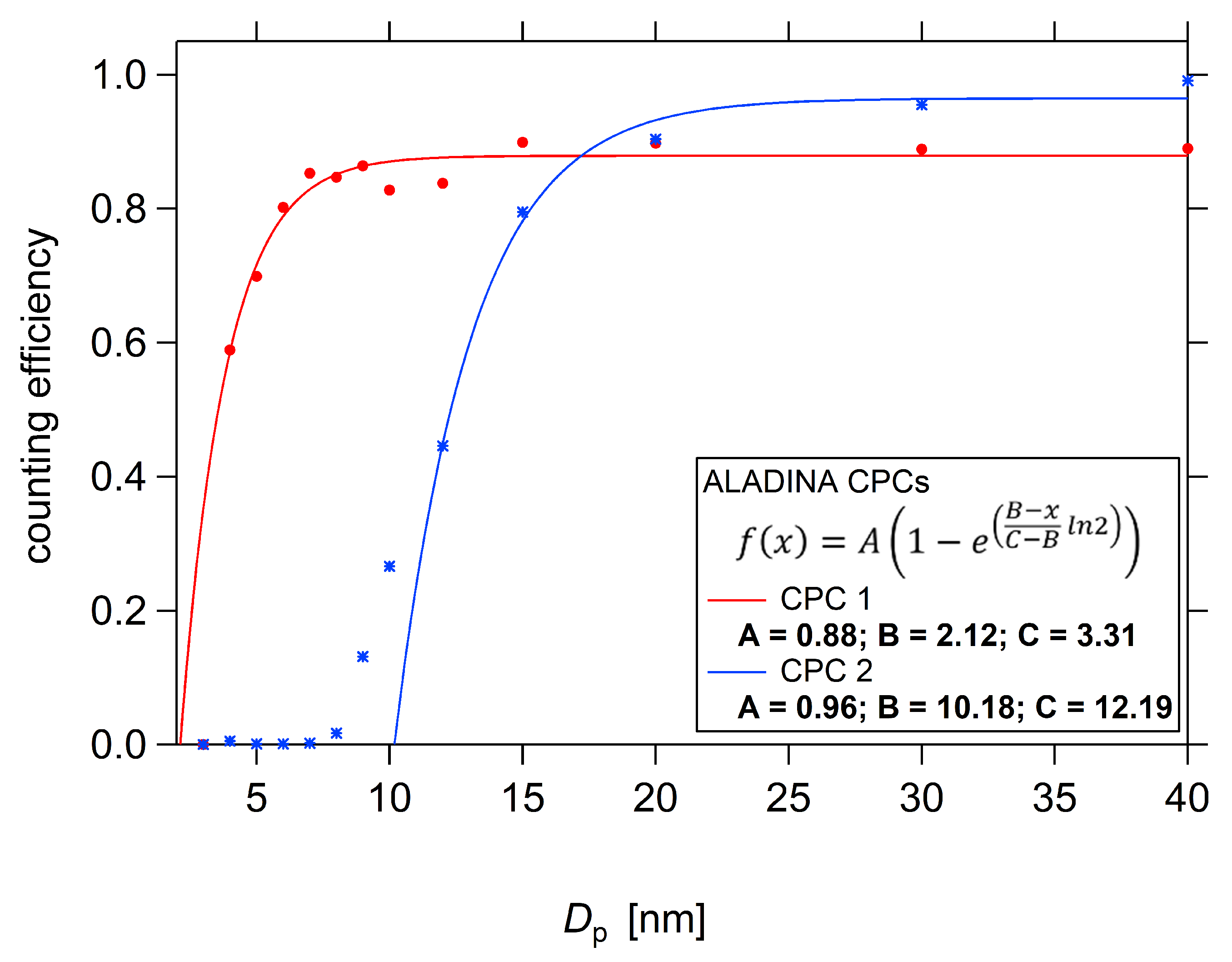
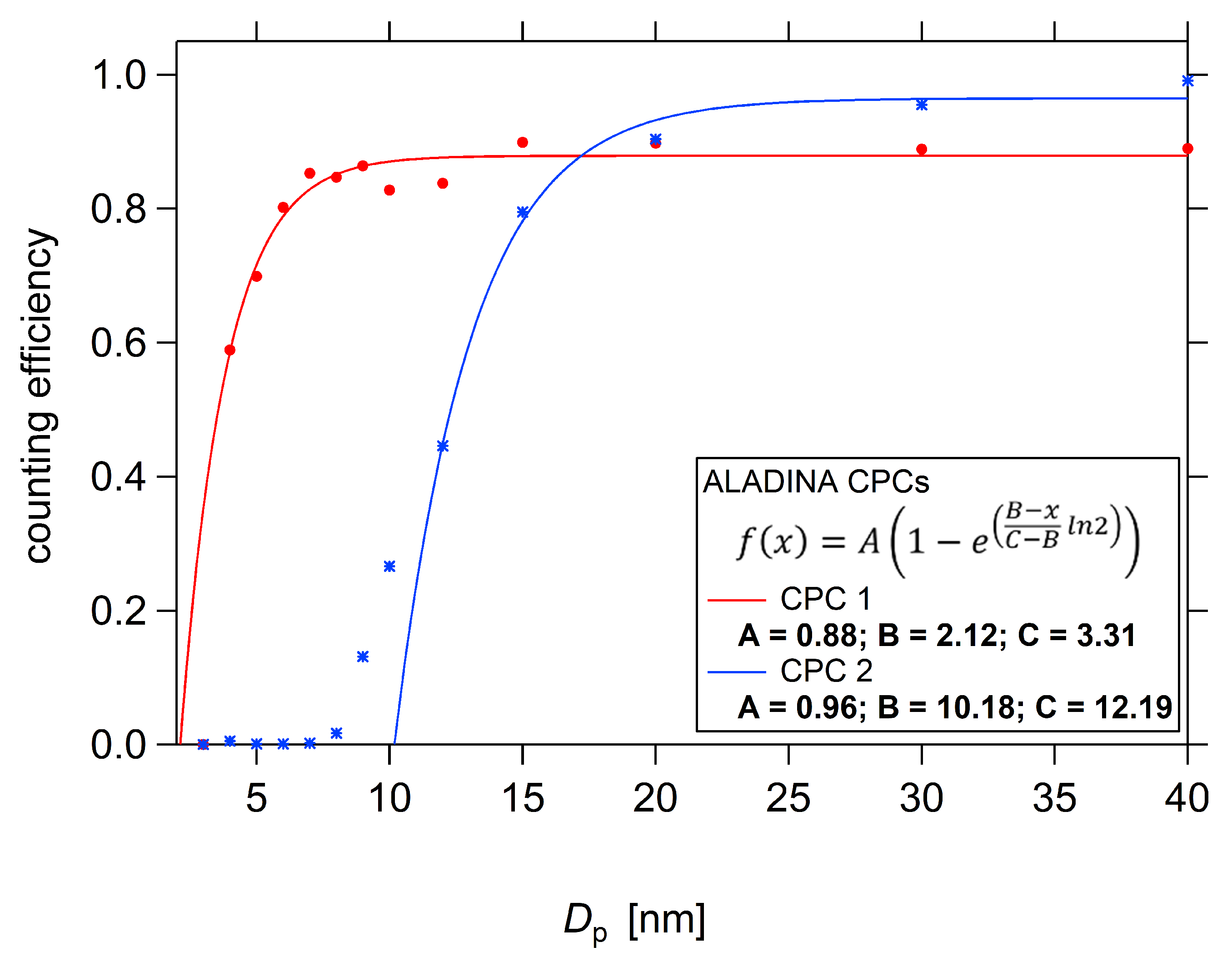
4.3. Instrumentation to Detect Ultrafine Aerosol Particles in the Arctic (ALADINA)
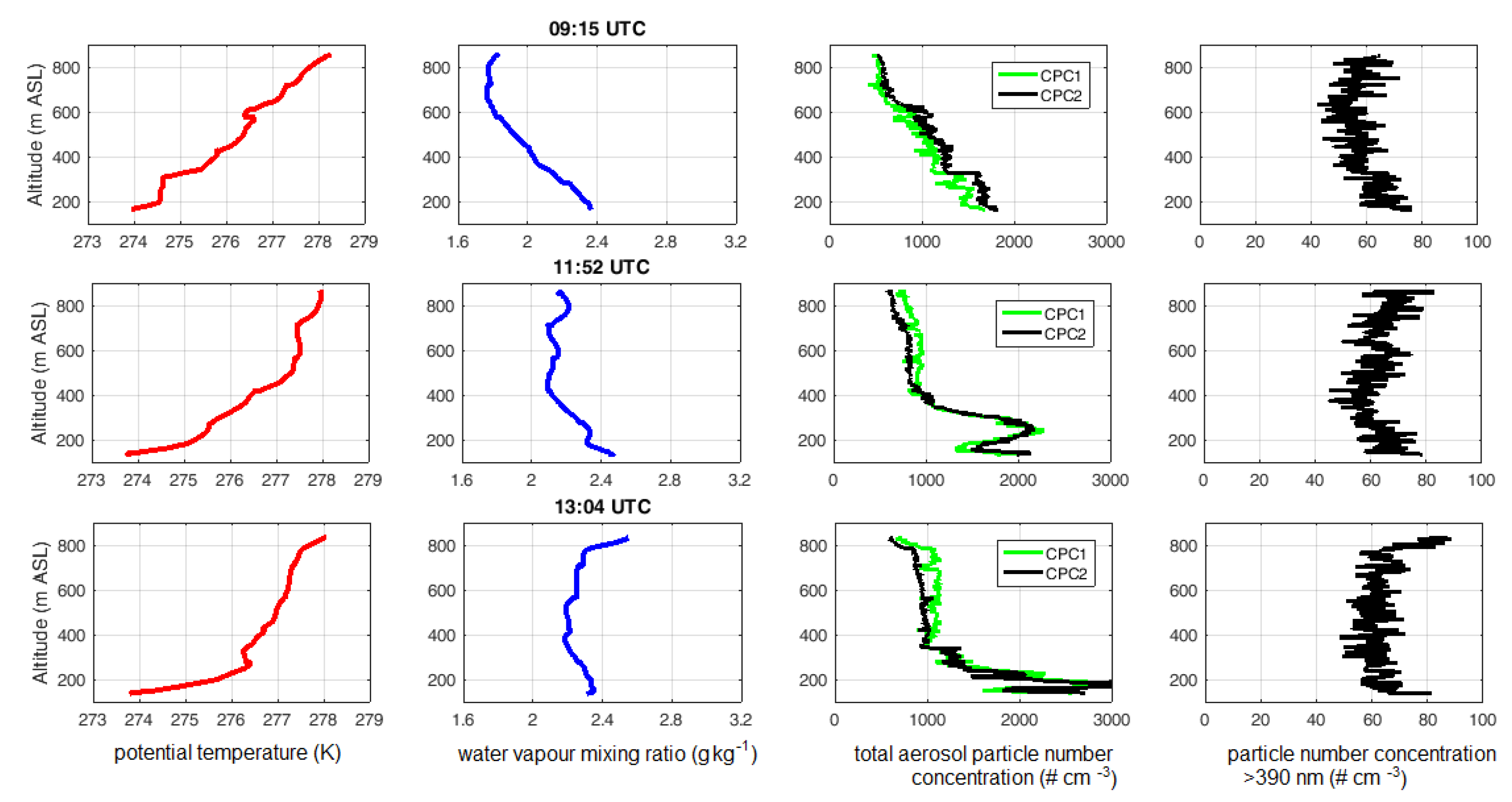
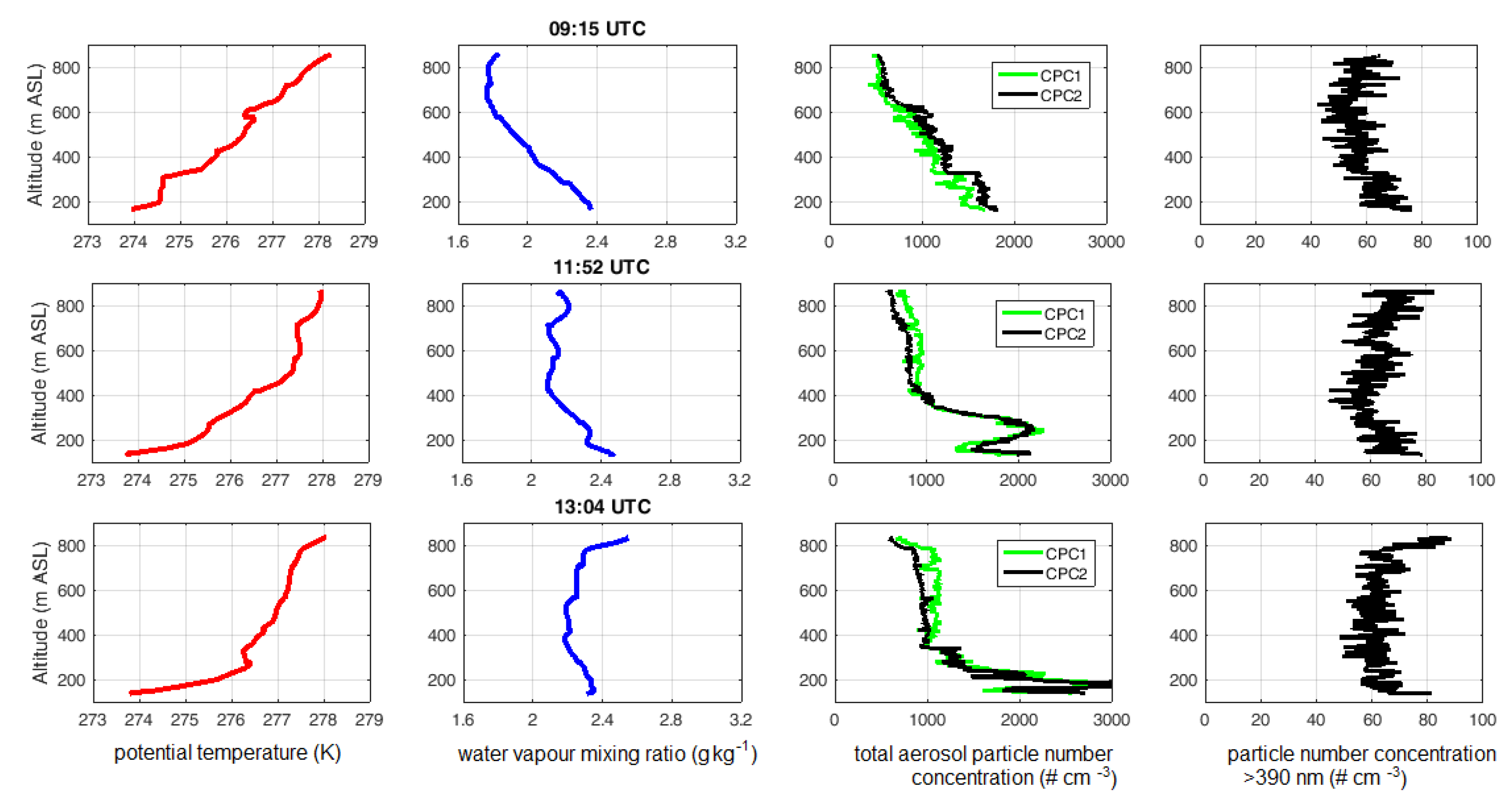
4.4. Vertical Distribution of Aerosol in Svalbard (ALADINA)
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Konrad, T.G.; Hill, M.L.; Rowland, J.R.; Meyer, J.H. A Small, Radio-Controlled Aircraft As A Platform For Meteorological Sensors. Johns Hopkins APL Tech. Dig. 1970, 10, 11–21. [Google Scholar]
- Emeis, S.; Kalthoff, N.; Adler, B.; Pardyjak, E.; Paci, A.; Junkermann, W. High-Resolution Observations of Transport and Exchange Processes in Mountainous Terrain. Atmosphere 2018, 9, 457. [Google Scholar] [CrossRef] [Green Version]
- Intrieri, J.M.; de Boer, G.; Shupe, M.D.; Spackman, J.R.; Wang, J.; Neiman, P.J.; Wick, G.A.; Hock, T.F.; Hood, R.E. Global Hawk dropsonde observations of the Arctic atmosphere obtained during the Winter Storms and Pacific Atmospheric Rivers (WISPAR) field campaign. Atmos. Meas. Tech. 2014, 7, 3917–3926. [Google Scholar] [CrossRef] [Green Version]
- Andreas, E.L.; Cash, B.A. Convective heat transfer over wintertime leads and polynyas. J. Geophys. Res. 1999, 104, 25721–25734. [Google Scholar] [CrossRef]
- Lüpkes, C.; Gryanik, V.M.; Witha, B.; Gryschka, M.; Raasch, S.; Gollnik, T. Modeling convection over arctic leads with LES and a non-eddy-resolving microscale model. J. Geophys. Res. 2008, 113, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Lüpkes, C.; Vihma, T.; Birnbaum, G.; Wacker, U. Influence of leads in sea ice on the temperature of the atmospheric boundary layer during polar night. Geophys. Res. Lett. 2008, 35, L03805. [Google Scholar] [CrossRef] [Green Version]
- Soddell, J.R.; McGuffie, K.; Holland, G.J. An in-flight airframe icing nowcast for use with the Aerosonde. In Proceedings of the 10th Conference on Aviation, Range, and Aerospace Meteorology, Portland, ON, USA, 13–16 May 2002; Conference Paper P4.5, 4p. Available online: https://ams.confex.com/ams/13ac10av/techprogram/paper_38619.htm (accessed on 10 October 2019).
- Bates, T.S.; Quinn, P.K.; Johnson, J.E.; Corless, A.; Brechtel, F.J.; Stalin, S.E.; Meinig, C.; Burkhart, J.F. Measurements of atmospheric aerosol vertical distributions above Svalbard, Norway, using unmanned aerial systems (UAS). Atmos. Meas. Tech. 2013, 6, 2115–2120. [Google Scholar] [CrossRef] [Green Version]
- Curry, J.A.; Maslanik, J.; Holland, G.; Pinto, J. Applications of Aerosondes in the Arctic. Bull. Am. Meteor. Soc. 2004, 85, 1855–1861. [Google Scholar] [CrossRef] [Green Version]
- Telg, H.; Murphy, D.M.; Bates, T.S.; Johnson, J.E.; Quinn, P.K.; Giardi, F.; Gao, R.-S. A practical set of miniaturized instruments for vertical profiling of aerosol physical properties. Aerosol Sci. Technol. 2017, 51, 715–723. [Google Scholar] [CrossRef]
- Fraser, R.H.; Olthof, I.; Lantz, T.C.; Schmitt, C. UAV photogrammetry for mapping vegetation in the low-Arctic. Arct. Sci. 2016, 2, 79–102. [Google Scholar] [CrossRef] [Green Version]
- Riihimäki, H.; Luoto, M.; Heiskanen, J. Estimating fractional cover of tundra vegetation at multiple scales using unmanned aerial systems and optical satellite data. Remote Sens. Environ. 2019, 224, 119–132. [Google Scholar] [CrossRef]
- Lehmenhecker, S.; Wulff, T. Flying Drone for AUV Under-Ice Missions. Sea Technol. 2013, 55, 61–64. [Google Scholar]
- Bash, E.A.; Moorman, B.J. Surface melt and the importance of water flow—An analysis based on high-resolution unmanned aerial vehicle (UAV) data for an Arctic glacier. Cryosphere 2020, 14, 549–563. [Google Scholar] [CrossRef] [Green Version]
- Cimoli, E.; Marcer, M.; Vandecrux, B.; Bøggild, C.E.; Willims, G.; Simonsen, S.B. Application of Low-Cost UASs and Digital Photogrammetry for High-Resolution Snow Depth Mapping in the Arctic. Remote Sens. 2017, 9, 1144. [Google Scholar] [CrossRef] [Green Version]
- Jonassen, M.O.; Tisler, P.; Altstädter, B.; Scholtz, A.; Vihma, T.; Lampert, A.; König-Langlo, G.; Lüpkes, C. Application of remotely piloted aircraft systems in observing the atmospheric boundary layer over Antarctic sea ice in winter. Polar Res. 2015, 34, 25651. [Google Scholar] [CrossRef] [Green Version]
- Pätzold, F.; Krüger, T.; Nowak, S.; Damm, E.; Bärfuss, K.; Rausch, T.; Asmussen, M.; Lampert, A. Unmanned air sampling quadrocopter for studying boundary layer methane isotopy and vertical mixing processes—Initial field test data, PS109. PANGAEA 2019. [Google Scholar] [CrossRef]
- Petäjä, T.; Duplissy, E.-M.; Tabakova, K. Integrative and comprehensive Understanding on Polar Environments (iCUPE): The concept and initial results. Atmos. Chem. Phys. Discuss. 2020. [Google Scholar] [CrossRef] [Green Version]
- Van den Kroonenberg, A.C.; Martin, T.; Buschmann, M.; Bange, J.; Vörsmann, P. Measuring the Wind Vector Using the Autonomous Mini Aerial Vehicle M2AV. J. Atmos. Ocean. Technol. 2008, 25, 1969–1982. [Google Scholar] [CrossRef]
- Spiess, T.; Bange, J.; Buschmann, M.; Vörsmann, P. First, application of the meteorological Mini-UAV ’M2AV’. Meteorol. Z. 2007, 16, 159–169. [Google Scholar] [CrossRef]
- Bärfuss, K.; Pätzold, F.; Altstädter, B.; Kathe, E.; Nowak, S.; Bretschneider, L.; Bestmann, U.; Lampert, A. New Setup of the UAS ALADINA for Measuring Boundary Layer Properties, Atmospheric Particles and Solar Radiation. Atmosphere 2018, 9, 28. [Google Scholar] [CrossRef] [Green Version]
- Rautenberg, A.; Allgeier, J.; Jung, S.; Bange, J. Calibration Procedure and Accuracy of Wind and Turbulence Measurements with Five-Hole Probes on Fixed-Wing Unmanned Aircraft in the Atmospheric Boundary Layer and Wind Turbine Wakes. Atmosphere 2019, 10, 124. [Google Scholar] [CrossRef] [Green Version]
- Martin, S.; Bange, J.; Beyrich, F. Meteorological profiling of the lower troposphere using the research UAV “M2AV Carolo”. Atmos. Meas. Tech. 2011, 4, 705–716. [Google Scholar] [CrossRef] [Green Version]
- Canut, G.; Couvreux, F.; Lothon, M.; Legain, D.; Piguet, B.; Lampert, A.; Maurel, W.; Moulin, E. Turbulence fluxes and variances measured with a sonic anemometer mounted on a tethered balloon. Atmos. Meas. Tech. 2016, 8, 4375–4386. [Google Scholar] [CrossRef] [Green Version]
- Lampert, A.; Pätzold, F.; Jiménez, M.A.; Lobitz, L.; Martin, S.; Lohmann, G.; Canut, G.; Legain, D.; Bange, J.; Martínez-Villagrasa, D.; et al. A study of local turbulence and anisotropy during the afternoon and evening transition with an unmanned aerial system and mesoscale simulation. Atmos. Chem. Phys. 2016, 1, 8009–8021. [Google Scholar] [CrossRef] [Green Version]
- Rautenberg, A.; Schön, M.; zum Berge, K.; Mauz, M.; Manz, M.; Platis, A.; van Kesteren, B.; Suomi, I.; Kral, S.T.; Bange, J. The Multi-Purpose Airborne Sensor Carrier MASC-3 for Wind and Turbulence Measurements in the Atmospheric Boundary Layer. Sensors 2019, 19, 2292. [Google Scholar] [CrossRef] [Green Version]
- Wildmann, N.; Hofsäß, M.; Weimer, F.; Joos, A.; Bange, J. MASC—A small Remotely Piloted Aircraft (RPA) for wind energy research. Adv. Sci. Res. 2014, 11, 55–61. [Google Scholar] [CrossRef] [Green Version]
- Båserud, L.; Reuder, J.; Jonassen, M.O.; Kral, S.T.; Paskyabi, M.B.; Lothon, M. Proof of concept for turbulence measurements with the RPAS SUMO during the BLLAST campaign. Atmos. Meas. Tech. 2016, 9, 4901–4913. [Google Scholar] [CrossRef] [Green Version]
- Reineman, B.D.; Lenain, L.; Statom, N.M.; Melville, W.K. Development and Testing of Instrumentation for UAV-Based Flux Measurements within Terrestrial and Marine Atmospheric Boundary Layer. J. Atmos. Ocean. Technol. 2013, 30, 1295–1319. [Google Scholar] [CrossRef]
- Lampert, A.; Pätzold, F.; Asmussen, M.; Lobitz, L.; Krüger, T.; Rausch, T.; Sachs, T.; Wille, C.; Damm, E. Studying boundary layer methane isotopy and vertical mixing processes at a rewetted peatland site by unmanned aircraft system. Atmos. Meas. Tech. 2020. [Google Scholar] [CrossRef] [Green Version]
- Altstädter, B.; Platis, A.; Wehner, B.; Scholtz, A.; Wildmann, N.; Hermann, M.; Käthner, R.; Baars, H.; Bange, J.; Lampert, A. ALADINA—An unmanned research aircraft for observing vertical and horizontal distributions of ultrafine particles within the atmospheric boundary layer. Atmos. Meas. Tech. 2015, 8, 1627–1639. [Google Scholar] [CrossRef] [Green Version]
- Altstädter, B.; Platis, A.; Jähn, M.; Baars, H.; Lückerath, J.; Held, A.; Lampert, A.; Bange, J.; Hermann, M.; Wehner, B. Airborne observations of newly formed boundary layer aerosol particles under cloudy conditions. Atmos. Chem. Phys. 2018, 18, 8249–8264. [Google Scholar] [CrossRef] [Green Version]
- Platis, A.; Altstädter, B.; Wehner, B.; Wildmann, N.; Lampert, A.; Hermann, M.; Birmilli, W.; Bange, J. An observational Case Study of the Influence of Atmospheric Boundary-Layer Dynamics on New Particle Formation. Bound.-Layer Meteorol. 2015. [Google Scholar] [CrossRef]
- Altstädter, B.; Ebus, F.; Deetz, K.; Vogel, B.; Babić, K.; Dione, C.; Pacifico, F.; Jambert, C.; Bärfuss, K.; Pätzold, F.; et al. The Vertical Variability of Black Carbon Observed in the Atmospheric Boundary Layer during DACCIWA. Atmos. Chem. Phys. Discuss. 2019. [Google Scholar] [CrossRef]
- Reineman, B.D.; Lenain, L.; Melville, W.K. The Use of Ship-Launched Fixed-Wing UAVs for Measuring the Marine Atmospheric Boundary Layer and Ocean Surface Processes. J. Atmos. Ocean. Technol. 2016, 33, 2029–2052. [Google Scholar] [CrossRef]
- Greene, B.R.; Segales, A.R.; Waugh, S.; Duthoit, S.; Chilson, P.B. Considerations for temperature sensor placement on rotary-wing unmanned aircraft systems. Atmos. Meas. Tech. 2018, 11, 5519–5530. [Google Scholar] [CrossRef] [Green Version]
- Bureau d’enquetes et D’Analyses Pour la Sécurité de L’aviation Civile (BEA): Final Report on the Accident on 1st June 2009 to the Airbus A330-203 Registered F-GZCP Operated by Air France Flight AF 447 Rio de Janeiro—Paris, Le Bourget. 2012. Available online: https://www.bea.aero/docspa/2009/f-cp090601.en/pdf/f-cp090601.en.pdf (accessed on 2 February 2020).
- Cassano, J.J.; Seefeldt, M.W.; Palo, S.; Knuth, S.L.; Bradley, A.C.; Herrman, P.D.; Kernebone, P.A.; Logan, N.J. Observations of the atmosphere and surface state over Terra Nova Bya, Antarctica, using unmanned aerial systems. Earth Syst. Sci. Data 2016, 8, 115–126. [Google Scholar] [CrossRef] [Green Version]
- König-Langlo, G. Meteorological Observations during POLARSTERN Cruise ANT-XXIX/6 (AWECS); Alfred Wegener Institute for Polar and Marine Research: Bremerhaven, Germany, 2013. [Google Scholar] [CrossRef]
- Schwegemann, S. Sea Ice Conditions during POLARSTERN Cruise ANT-XXIX/6 (AWECS); Alfred Wegener Institute, Helmholtz Center for Polar and Marine Research: Bremerhaven, Germany, 2013. [Google Scholar] [CrossRef]
- Tetzlaff, A.; Lüpkes, C.; Hartmann, J. Aircraft-based observations of atmospheric boundary-layer modification over Arctic leads. Q. J. R. Meteorol. Soc. 2015, 141, 2839–2856. [Google Scholar] [CrossRef]
- König-Langlo, G. Upper Air Soundings during POLARSTERN Cruise ANT-XXIX/6 (AWECS) to the Antarctic in 2013; Alfred Wegener Institute, Helmholtz Center for Polar and Marine Research: Bremerhaven, Pangaea, 2013. [Google Scholar] [CrossRef]
- Schlünzen, K.H.; Bungert, U.; Flagg, D.D.; Fock, B.H.; Gierisch, A.; Grawe, D.; Kirschner, P.; Lüpkes, C.; Reinhardt, V.; Ries, H.; et al. Technical Documentation of the Multiscale Model System M-SYS (METRAS, MITRAS, MECTM, MICTM, MESIM), (Tech. Rep. No. 3). 2012. Available online: https://www.mi.uni-hamburg.de/en/arbeitsgruppen/memi/modelle/dokumentation/msys-technical-documentation.pdf (accessed on 20 March 2020).
- Schlünzen, K.H.; Flagg, D.D.; Fock, B.H.; Gierisch, A.; Lüpkes, C.; Reinhardt, V.; Spensberger, C. Scientific Documentation of the Multiscale Model System M-SYS (METRAS, MITRAS, MECTM, MICTM, MESIM), (Tech. Rep. No. 4). 2012. Available online: https://www.mi.uni-hamburg.de/en/arbeitsgruppen/memi/modelle/dokumentation/msys–scientific–documentation.pdf (accessed on 20 March 2020).
- Herbert, F.; Kramm, G. Trockene Deposition reaktionsträger Substanzen, beschrieben mit einem diagnostischen Modell der bodennahen Luftschicht. In Atmosphärische Spurenstoffe und ihr Physikalisch-chemisches Verhalten; Becker, K.H., Löbel, J., Eds.; Springer: Berlin/Heidelberg, Germany, 1985; pp. 190–209. [Google Scholar] [CrossRef]
- Lüpkes, C.; Schlünzen, K.H. Modelling the Arctic convective boundary-layer with different turbulence parameterizations. Bound-Lay. Meteorol. 1996, 79, 107–130. [Google Scholar] [CrossRef]
- Podgorny, I.; Lubin, D.; Perovich, D.K. Monte Carlo Study of UAV-Measurable Albedo over Arctic Sea Ice. J. Atmos. Ocean. Technol. 2018, 35, 57–66. [Google Scholar] [CrossRef]
- Yu, L.; Yang, Q.; Zhou, M.; Zeng, X.; Lenschow, D.H.; Wang, X.; Han, B. The Intraseasonal and Interannual Variability of Arctic Temperature and Specific Humidity Inversions. Atmosphere 2019, 10, 214. [Google Scholar] [CrossRef] [Green Version]
- Kulmala, M.; Vehkamäki, H.; Petäjä, T.; Dal Maso, M.; Lauri, A.; Kerminen, V.-M.; Birmili, W.; McMurry, P.H. Formation and growth rates of ultrafine atmospheric particles: A review of observations. J. Aerosol. Sci. 2004, 35, 143–176. [Google Scholar] [CrossRef]
- Kerminen, V.-M.; Chen, X.; Vakkari, V.; Petäjä, T.; Kulmala, M.; Bianchi, F. Atmospheric new particle formation and growth: Review of field observations. Environ. Res. Lett. 2018, 13, 1–38. [Google Scholar] [CrossRef] [Green Version]
- Ramana, M.V.; Ramanathan, V.; Kim, D.; Roberts, C.; Corrigan, C.E. Albedo, atmospheric solar absorption and heating rate measurements with stacked UAVs. Q. J. R. Meter. Soc. 2007, 133, 1913–1931. [Google Scholar] [CrossRef]
- Ramanathan, V.; Ramana, M.V.; Roberts, G.; Kim, D.; Corrigan, C.; Chung, C.; Winker, D. Warming trends in Asia amplified by brown cloud solar absorption. Nature 2007, 448, 575–579. [Google Scholar] [CrossRef]
- Banse, D.F.; Esfeld, K.; Hermann, M.; Sierau, B.; Wiedensohler, A. Particle counting efficiency of the TSI CPC 3762 for different operating parameters. J. Aerosol. Sci. 2001, 32, 157–161. [Google Scholar] [CrossRef]
- Wiedensohler, A.; Wiesner, A.; Weinhold, K.; Birmili, W.; Hermann, M.; Merkel, M.; Müller, T.; Pfeifer, S.; Schmidt, A.; Tuch, T.; et al. Mobility particle size spectrometers: Calibration procedures and measurement uncertainties. Aerosol. Sci. Technol. 2018, 52, 146–164. [Google Scholar] [CrossRef] [Green Version]
- Argentini, S.; Viiola, A.; Mastrantonio, G.; Maurizi, A.; Georgiadis, T.; Nardino, M. Characteristics of the boundary layer at Ny- Ålesund in the Arctic during the ARTIST field experiment. Ann. Geophys. 2003, 46, 185–196. [Google Scholar] [CrossRef]
- Beine, H.J.; Argentini, S.; Maurizi, A.; Mastrantonio, G.; Viola, A. The local wind field at Ny- Ålesund and the Zeppelin Mountain at Svalbard. Meteorol. Atmos. Phys. 2001, 78, 107–113. [Google Scholar] [CrossRef]
- Lampert, A.; Ström, J.; Ritter, C.; Neuber, R.; Yoon, Y.J.; Chae, N.Y.; Shiobara, M. Inclined Lidar Observations of Boundary Layer Aerosol Particles above the Kongsfjord, Svalbard. Acta Geophys. 2011, 60, 1287–1307. [Google Scholar] [CrossRef] [Green Version]
- Thomas, R.M.; Lehmann, K.; Nguyen, H.; Jackson, D.; Wolfe, D.; Ramanathan, V. Measurement of turbulent water vapor fluxes using a lightweight unmanned aerial vehicle system. Atmos. Meas. Tech. 2012, 141, 243–257. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name and System | Sensors | Polar Campaign | Case Study |
|---|---|---|---|
| MAV (fixed-wing, Section 2.1, Section 3.1) | , T, hum (Section 2.1) | Weddell Sea 2013 | icing (Section 3.5), leads (Section 4.1), |
| ALICE (quadrocopter, Section 2.2, Section 3.2) | T, hum, surf T, rad, air samp (Section 3.4) | Greenland Sea 2017 | T variability (Section 4.2), |
| ALADINA (fixed-wing, Section 2.3, Section 3.1, Section 3.3) | , T, hum, surf T, rad, aerosol (Section 4.3) | Svalbard 2018 | aerosol variability (Section 4.4) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lampert, A.; Altstädter, B.; Bärfuss, K.; Bretschneider, L.; Sandgaard, J.; Michaelis, J.; Lobitz, L.; Asmussen, M.; Damm, E.; Käthner, R.; et al. Unmanned Aerial Systems for Investigating the Polar Atmospheric Boundary Layer—Technical Challenges and Examples of Applications. Atmosphere 2020, 11, 416. https://doi.org/10.3390/atmos11040416
Lampert A, Altstädter B, Bärfuss K, Bretschneider L, Sandgaard J, Michaelis J, Lobitz L, Asmussen M, Damm E, Käthner R, et al. Unmanned Aerial Systems for Investigating the Polar Atmospheric Boundary Layer—Technical Challenges and Examples of Applications. Atmosphere. 2020; 11(4):416. https://doi.org/10.3390/atmos11040416
Chicago/Turabian StyleLampert, Astrid, Barbara Altstädter, Konrad Bärfuss, Lutz Bretschneider, Jesper Sandgaard, Janosch Michaelis, Lennart Lobitz, Magnus Asmussen, Ellen Damm, Ralf Käthner, and et al. 2020. "Unmanned Aerial Systems for Investigating the Polar Atmospheric Boundary Layer—Technical Challenges and Examples of Applications" Atmosphere 11, no. 4: 416. https://doi.org/10.3390/atmos11040416
APA StyleLampert, A., Altstädter, B., Bärfuss, K., Bretschneider, L., Sandgaard, J., Michaelis, J., Lobitz, L., Asmussen, M., Damm, E., Käthner, R., Krüger, T., Lüpkes, C., Nowak, S., Peuker, A., Rausch, T., Reiser, F., Scholtz, A., Sotomayor Zakharov, D., Gaus, D., ... Pätzold, F. (2020). Unmanned Aerial Systems for Investigating the Polar Atmospheric Boundary Layer—Technical Challenges and Examples of Applications. Atmosphere, 11(4), 416. https://doi.org/10.3390/atmos11040416