Retrieval of Cloud Liquid Water Using Microwave Signals from LEO Satellites: A Feasibility Study through Simulations


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. System Model
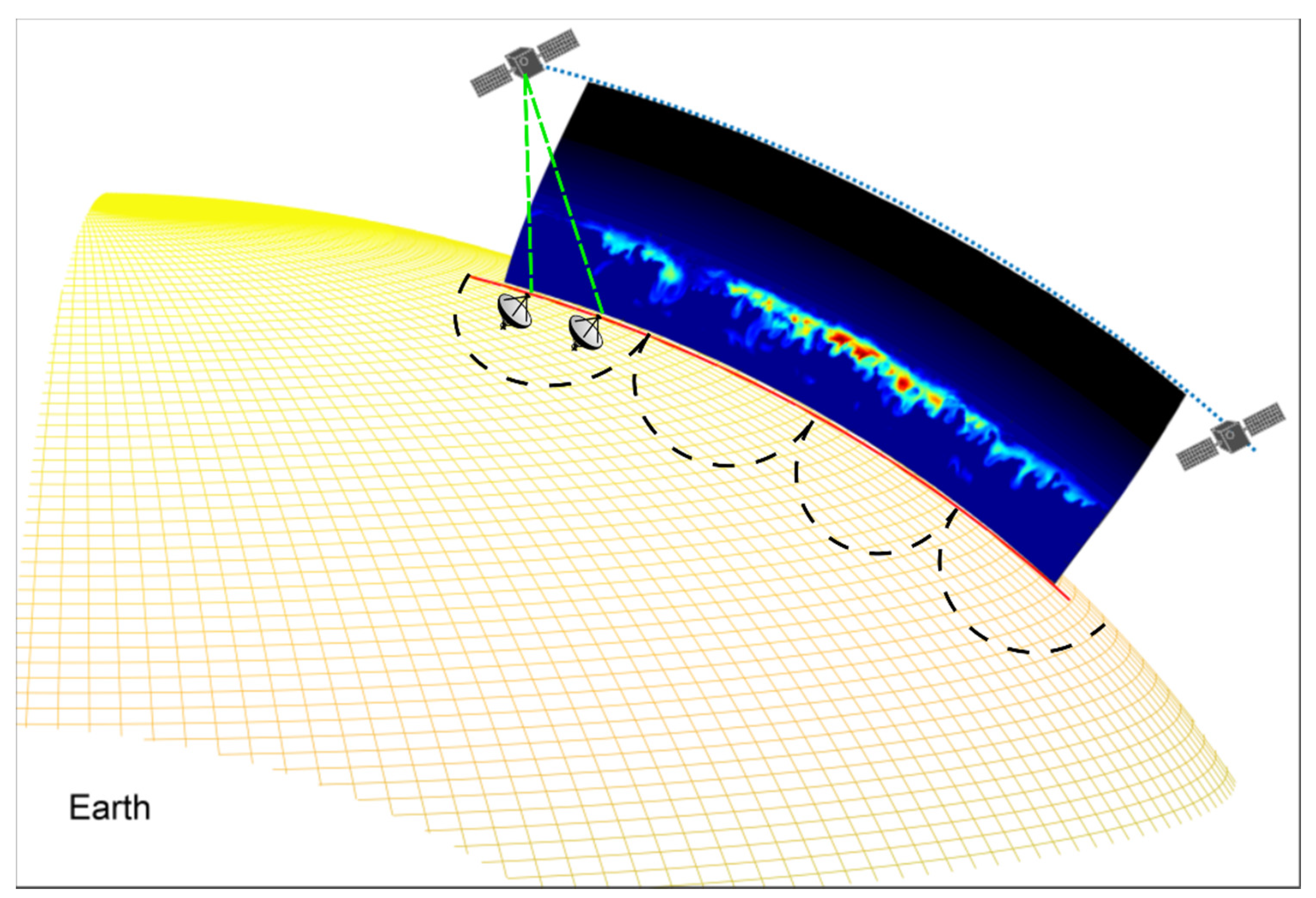
2.1. Orbital Geometry
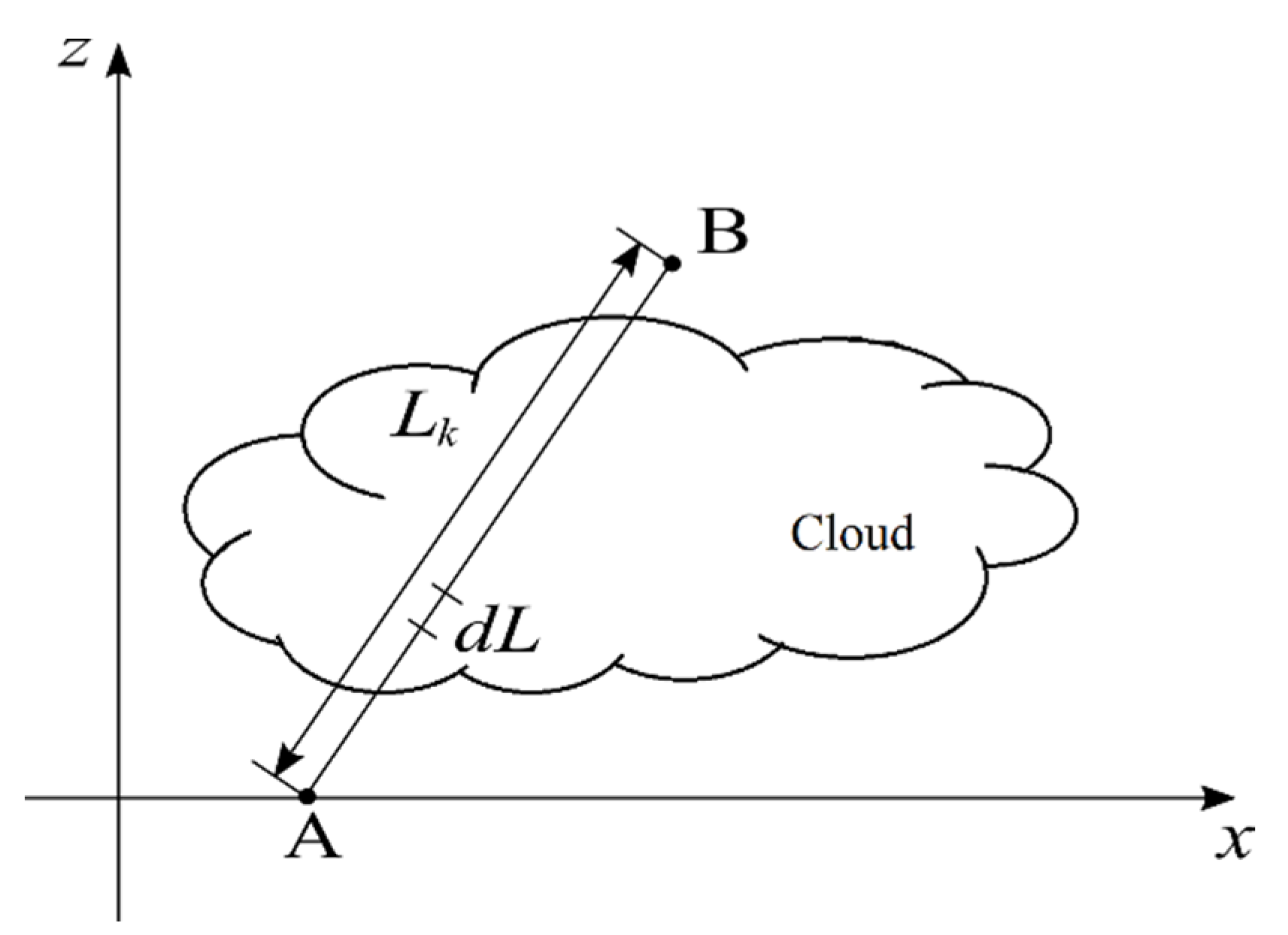
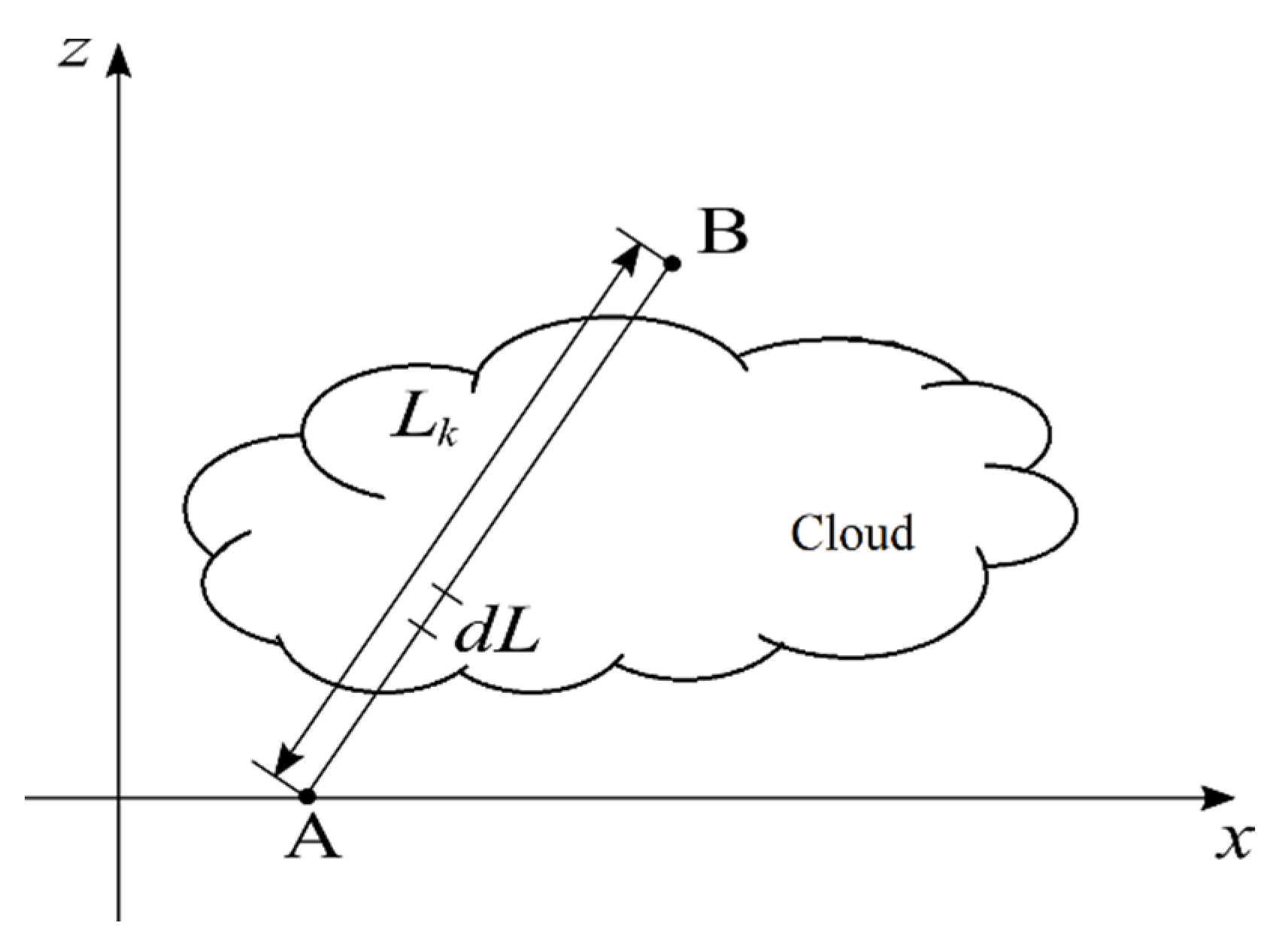
2.2. Signal Attenuation Model
3. Retrieval Method
4. Simulation Results
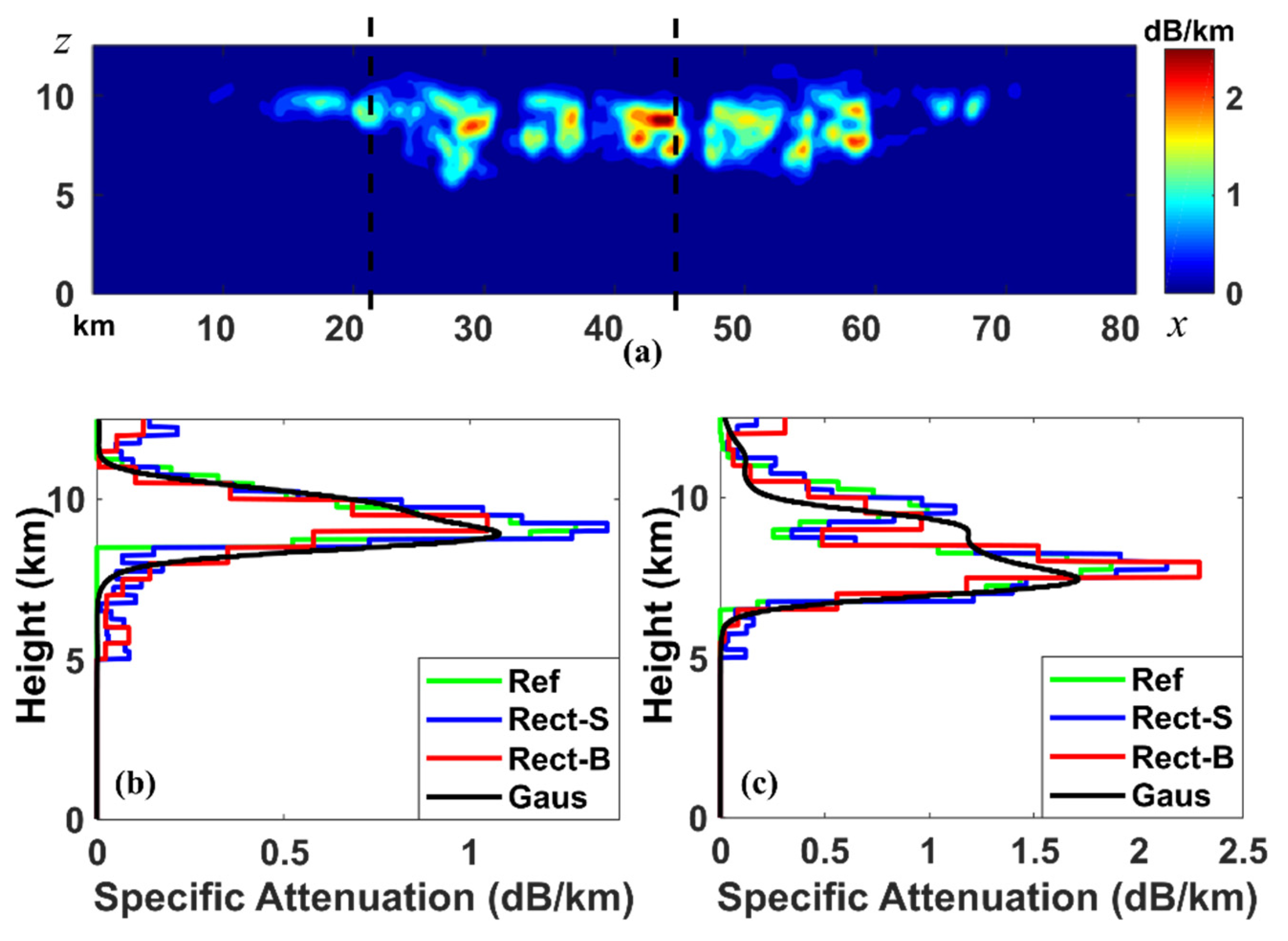
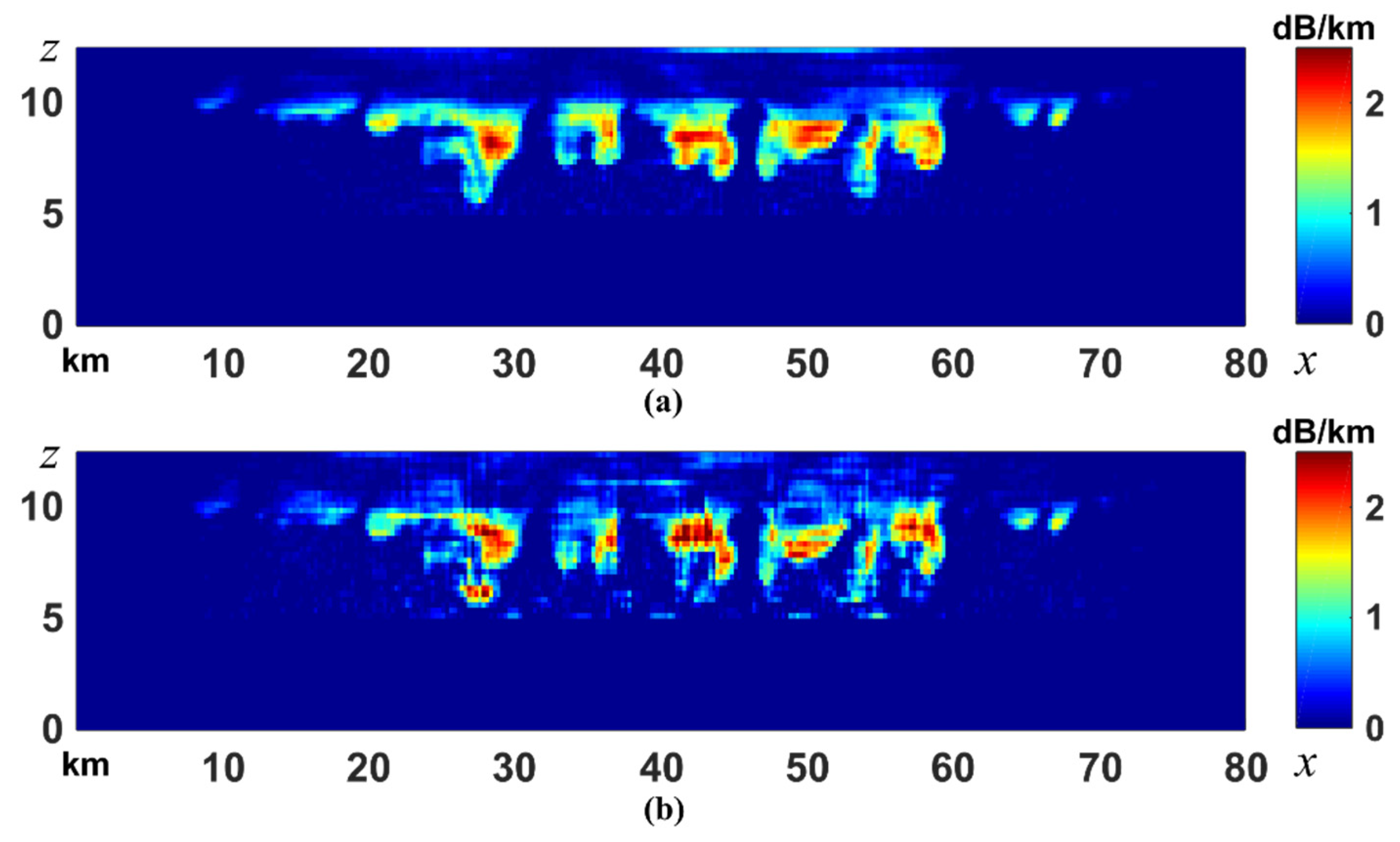
4.1. Synthetic Attenuation Field
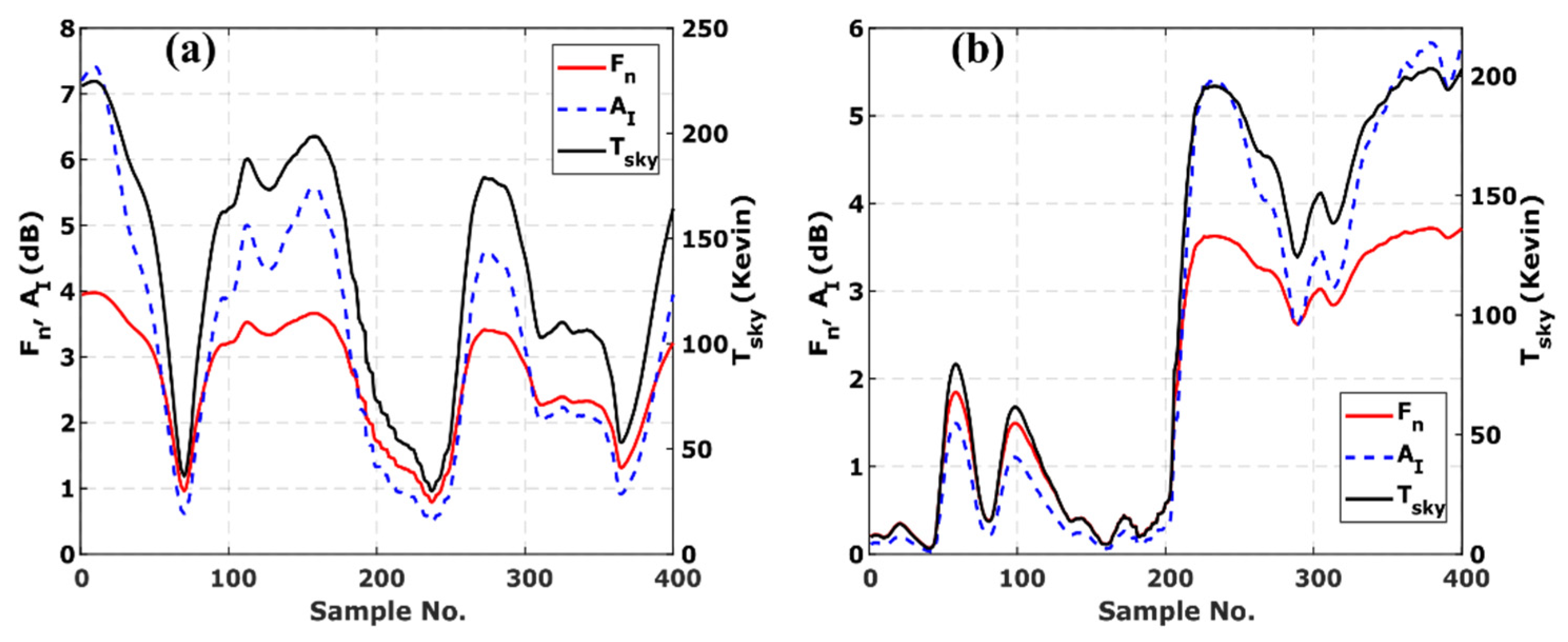
4.2. Simulation of the Estimated SNR
- For each receiver, preset the constant along a sine curve between 214 dB and 216 dB to simulate the differences across different receivers.
- Calculate the path-integrated attenuation and the free space loss using Equations (12) and (14), respectively.
- The sky noise temperature is computed according to the cloud attenuation from nine different directions and a simplified antenna beam pattern (Equations (10) and (11) with K, see [6] for details). Noise figure is then calculated using Equation (8) with K.
- The true SNR is then calculated using Equation (9).
- We assume a Binary Phase Shift Keying (BPSK) modulated signal with a bit rate of 10 Mbps and the estimated SNR is generated by adding the true SNR to a Gaussian random variable with zero mean and variance being equal to the CRLB.
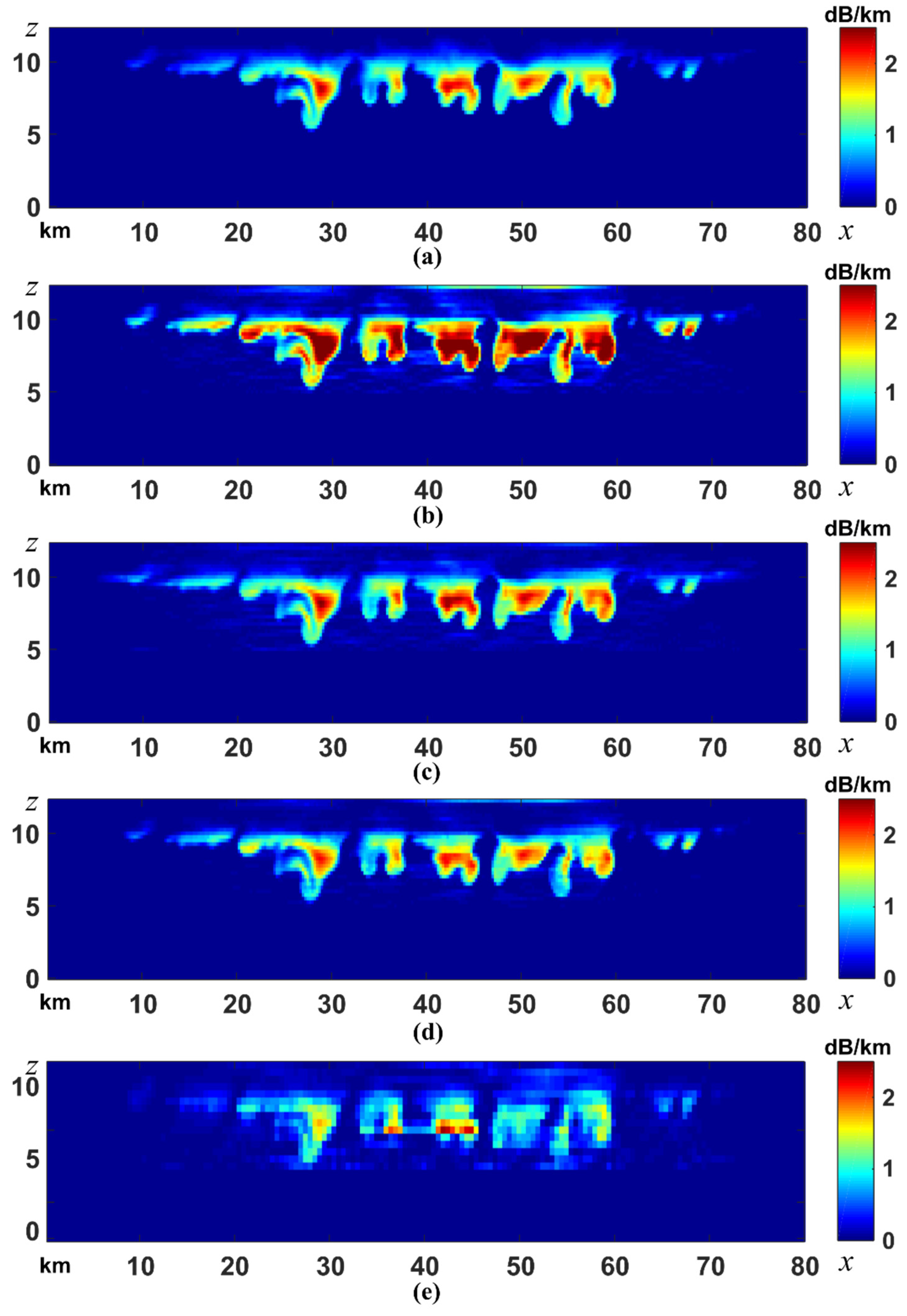
4.3. Retrieval Using Rectangular Basis Functions
4.4. Retrieval Using Gaussian Basis Functions
4.5. Effects of Larger Spacing among Receivers
4.6. Partial Retrieval
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Crewell, S. Estimation of Water Vapor and Clouds Using Microwave Sensors. In Encyclopedia of Hydrological Sciences; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- del Portillo, I.; Cameron, B.G.; Crawley, E.F. A technical comparison of three low earth orbit satellite constellation systems to provide global broadband. Acta Astronaut. 2019, 159, 123–135. [Google Scholar] [CrossRef]
- Huang, D.; Xu, L.; Feng, X.; Wang, W. A hypothesis of 3D rainfall tomography using satellite signals. J. Commun. Inf. Netw. 2016, 1, 134–142. [Google Scholar]
- Kak, A.C.; Slaney, M. Principles of Computerized Tomographic Imaging; SIAM: Philadelphia, PA, USA, 2001. [Google Scholar]
- Shen, X.; Huang, D.D.; Xu, L.; Tang, X. Reconstruction of vertical rainfall fields using satellite communication links. In Proceedings of the 2017 23rd Asia-Pacific Conference on Communications (APCC), Perth, Australia, 11–13 December 2017; pp. 1–6. [Google Scholar]
- Shen, X.; Huang, D.D.; Song, B.; Vincent, C.; Togneri, R. 3-D Tomographic Reconstruction of Rain Field Using Microwave Signals From LEO Satellites: Principle and Simulation Results. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5434–5446. [Google Scholar] [CrossRef]
- Sarkar, S.K.; Ahmad, I.; Gupta, M. Statistical morphology of cloud occurrences and cloud attenuation over Hyderabad, India. Indian J. Radio Space Phys. 2005, 34, 119–124. [Google Scholar]
- Moran, K.P.; Martner, B.E.; Post, M.J.; Kropfli, R.A.; Welsh, D.C.; Widener, K.B. An Unattended Cloud-Profiling Radar for Use in Climate Research. Bull. Am. Meteorol. Soc. 1998, 79, 443–456. [Google Scholar] [CrossRef] [Green Version]
- Slobin, S.D. Microwave noise temperature and attenuation of clouds: Statistics of these effects at various sites in the United States, Alaska, and Hawaii. Radio Sci. 1982, 17, 1443–1454. [Google Scholar] [CrossRef]
- Skamarock, W.C.; Klemp, J.B. A time-split nonhydrostatic atmospheric model for weather research and forecasting applications. J. Comput. Phys. 2008, 227, 3465–3485. [Google Scholar] [CrossRef]
- Powers, J.G.; Klemp, J.B.; Skamarock, W.C.; Davis, C.A.; Dudhia, J.; Gill, D.O.; Coen, J.L.; Gochis, D.J.; Ahmadov, R.; Peckham, S.E.; et al. The Weather Research and Forecasting Model: Overview, System Efforts, and Future Directions. Bull. Am. Meteorol. Soc. 2017, 98, 1717–1737. [Google Scholar] [CrossRef]
- Prein, A.F.; Rasmussen, R.M.; Wang, D.; Giangrande, S.E. Sensitivity of Organized Convective Storms to Model Grid Spacing in Current and Future Climates. Philos. Trans. R. Soc. A 2020, in press. [Google Scholar]
- Wang, D.; Giangrande, S.E.; Feng, Z.; Hardin, J.C.; Prein, A.F. Updraft and Downdraft Core Size and Intensity as Revealed by Radar Wind Profilers: MCS Observations and Idealized Model Comparisons. J. Geophys. Res. Atmos. 2020, in press. [Google Scholar]
- Rohrdantz, B.; Kuhlmann, K.; Stark, A.; Geise, A.; Jacob, A.F. Digital beamforming antenna array with polarisation multiplexing for mobile high-speed satellite terminals at Ka-band. J. Eng. 2016, 2016, 180–188. [Google Scholar] [CrossRef]
- Shen, X.; Huang, D.; Vincent, C.; Wang, W.; Togneri, R. A Differential Approach for Rain Field Tomographic Reconstruction Using Microwave Signals from Leo Satellites. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 9001–9005. [Google Scholar]
- Ippolito, L.J. Propagation Effects Handbook for Satellite Systems; NASA: Washington, DC, USA, 1989; Volume 1082. [Google Scholar]
- Ho, C.; Slobin, S.; Gritton, K. Atmospheric Noise Temperature Induced by Clouds and Other Weather Phenomena at SHF Band (1–45 GHz); Jet Propulsion Lab: Pasadena, CA, USA, 2005. [Google Scholar]
- Volakis, J. Antenna Engineering Handbook, 4th ed.; McGraw-Hill Professional: New York, NY, USA, 2007. [Google Scholar]
- Giuli, D.; Toccafondi, A.; Gentili, G.B.; Freni, A. Tomographic Reconstruction of Rainfall Fields through Microwave Attenuation Measurements. J. Appl. Meteorol. 1991, 30, 1323–1340. [Google Scholar] [CrossRef] [Green Version]
- Yamaji, T.; Kanou, N.; Itakura, T. A temperature stable CMOS variable gain amplifier with 80-dB linearly controlled gain range. In Proceedings of the 2001 Symposium on VLSI Circuits. Digest of Technical Papers (IEEE Cat. No.01CH37185), Kyoto, Japan, 14–16 June 2001; pp. 77–80. [Google Scholar]
- Mattioli, V.; Marzano, F.S.; Pierdicca, N.; Capsoni, C.; Martellucci, A. Modeling and Predicting Sky-Noise Temperature of Clear, Cloudy, and Rainy Atmosphere From X- to W-Band. IEEE Trans. Antennas Propag. 2013, 61, 3859–3868. [Google Scholar] [CrossRef]
- Giuli, D.; Facheris, L.; Tanelli, S. Microwave tomographic inversion technique based on stochastic approach for rainfall fields monitoring. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2536–2555. [Google Scholar] [CrossRef]
- Liebe, H.J. An updated model for millimeter wave propagation in moist air. Radio Sci. 1985, 20, 1069–1089. [Google Scholar] [CrossRef] [Green Version]
- Jacob, D.J. Introduction to Atmospheric Chemistry; Princeton University Press: Princeton, NJ, USA, 1999. [Google Scholar]
- ITU-R. Attenuation Due to Clouds and Fog; International Telecommunications Union: Geneva, Switzerland, 2019. [Google Scholar]
- Lawson, C.L.; Hanson, R.J. Solving Least Squares Problems; Prentice Hall: Upper Saddle River, NJ, USA, 1974. [Google Scholar]
- Bultheel, A.; Cools, R. The Birth of Numerical Analysis; World Scientific: Singapore, 2009. [Google Scholar]
- Wilcox, E.M.; Ramanathan, V. Scale Dependence of the Thermodynamic Forcing of Tropical Monsoon Clouds: Results from TRMM Observations. J. Clim. 2001, 14, 1511–1524. [Google Scholar] [CrossRef]




© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, X.; Huang, D.D.; Wang, W.; Prein, A.F.; Togneri, R. Retrieval of Cloud Liquid Water Using Microwave Signals from LEO Satellites: A Feasibility Study through Simulations. Atmosphere 2020, 11, 460. https://doi.org/10.3390/atmos11050460
Shen X, Huang DD, Wang W, Prein AF, Togneri R. Retrieval of Cloud Liquid Water Using Microwave Signals from LEO Satellites: A Feasibility Study through Simulations. Atmosphere. 2020; 11(5):460. https://doi.org/10.3390/atmos11050460
Chicago/Turabian StyleShen, Xi, Defeng David Huang, Wenxiao Wang, Andreas F. Prein, and Roberto Togneri. 2020. "Retrieval of Cloud Liquid Water Using Microwave Signals from LEO Satellites: A Feasibility Study through Simulations" Atmosphere 11, no. 5: 460. https://doi.org/10.3390/atmos11050460
APA StyleShen, X., Huang, D. D., Wang, W., Prein, A. F., & Togneri, R. (2020). Retrieval of Cloud Liquid Water Using Microwave Signals from LEO Satellites: A Feasibility Study through Simulations. Atmosphere, 11(5), 460. https://doi.org/10.3390/atmos11050460