

The Dual Nature of Chaos and Order in the Atmosphere

 ,
, 
 ,
, 
Abstract
:1. Introduction
“Weather possesses chaos and order; it includes, as examples, emerging organized systems (such as tornadoes) and time varying forcing from recurrent seasons”.
2. Analysis and Discussion
2.1. An Analogy for Monostability and Multistability Using Skiing and Kayaking
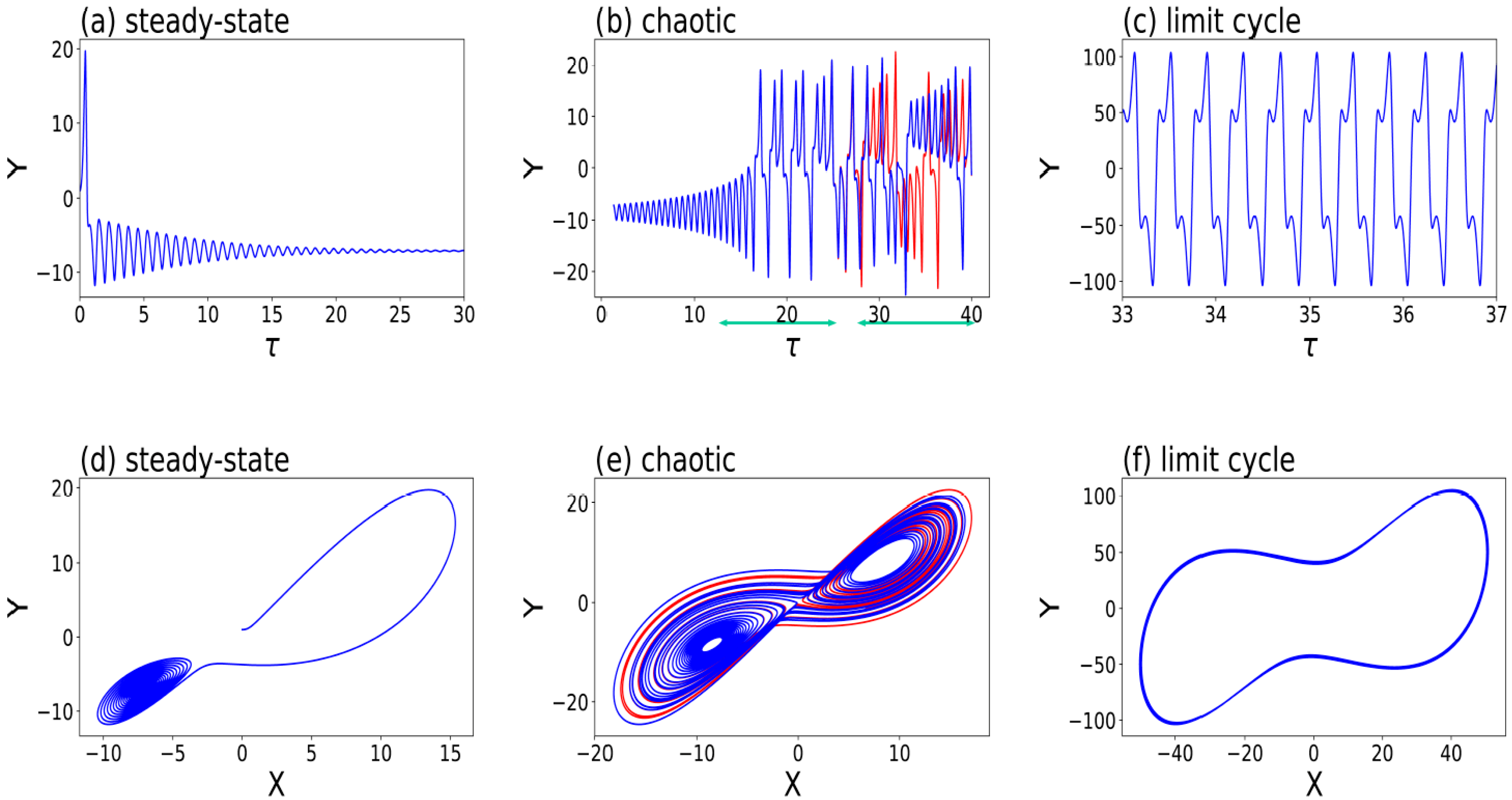
2.2. Single-Types of Attractors, SDIC, and Monostability within the L63 Model
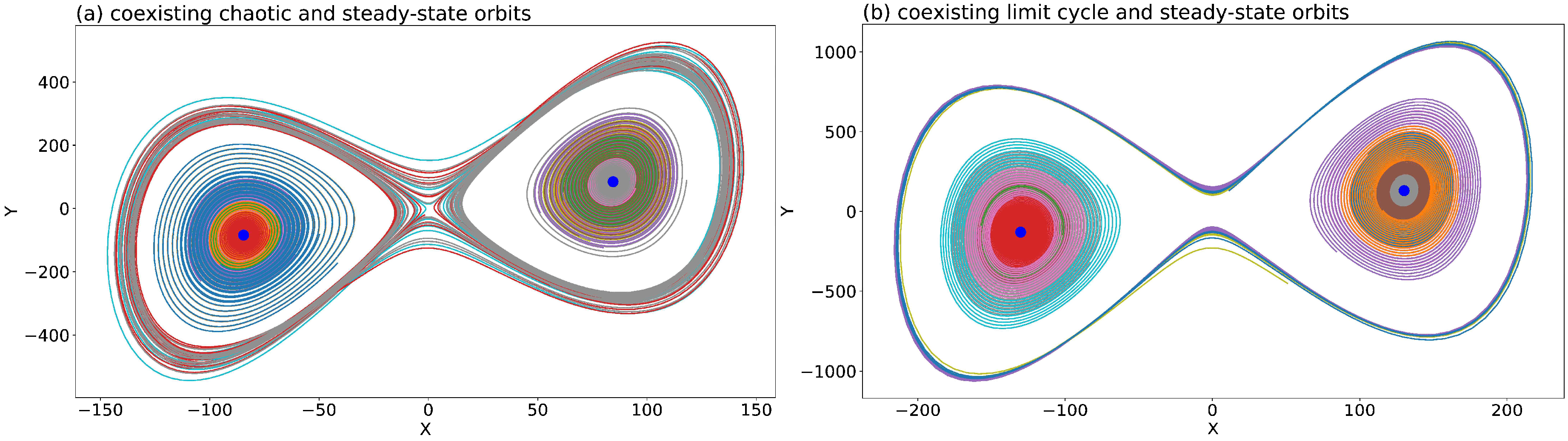
2.3. Coexisting Attractors and Multistability within the GLM
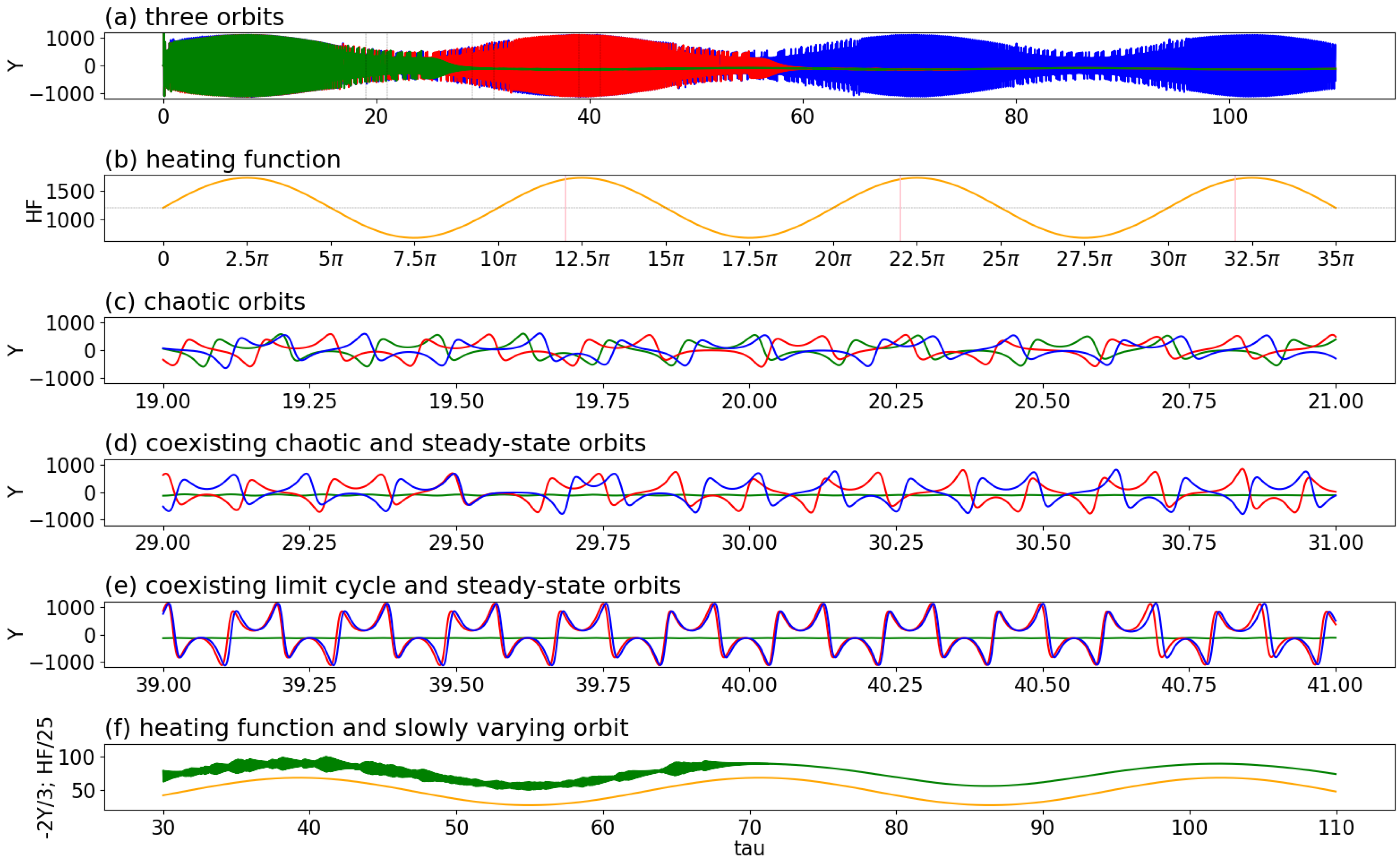
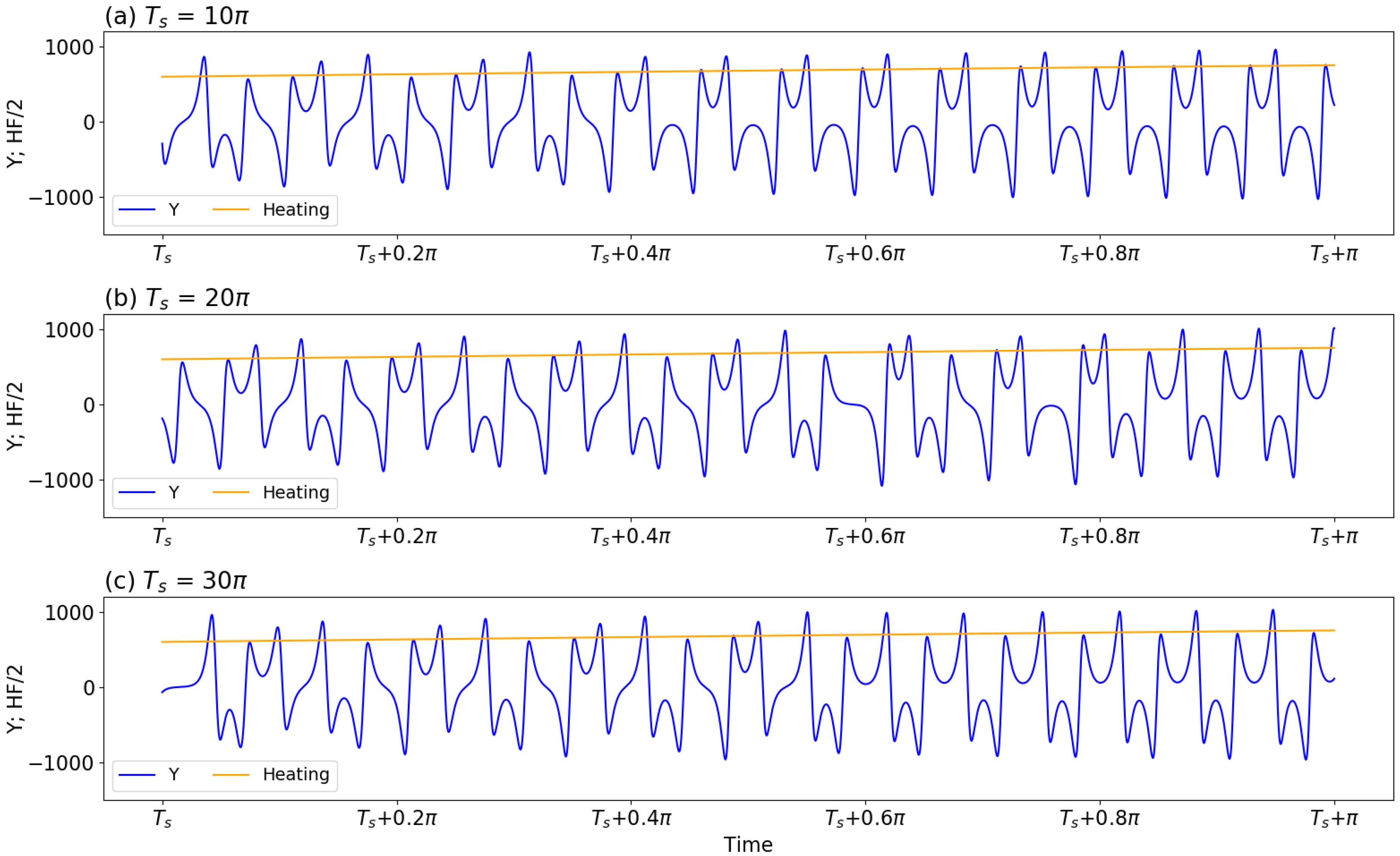
2.4. Time Varying Multistability and Recurrent Slowly Varying Solutions
2.5. Onset of Emerging Solutions
2.6. Various Types of Solutions within the L69 Model
- The L69 model is a closure-based, physically multiscale, mathematically linear, and numerically ill-conditioned system.
- The L69 multiscale model has been used for revealing energy transfer and scale interaction.
- The L69 linear model cannot produce chaos.
- Since it possesses both positive and negative eigenvalues with large variances, yielding a large condition number (e.g., Figure 4 and Figure 5 of [17]), the L69 model produces a different kind of sensitivity, as compared to SDIC within the L63 model.
- The model permits the occurrence of linearly stable and unstable solutions as well as oscillatory solutions. However, only unstable solutions have been a focus in predictability studies.
2.7. Distinct Predictability within Lorenz Models
- The L63 nonlinear model with monostability is effective for revealing the chaotic nature of weather, suggesting finite intrinsic predictability within the chaotic regime of the system (i.e., the atmosphere).
- The L69 linear model with ill-conditioning easily captures unstable modes and, thus, is effective for revealing the practical finite predictability of the model.
- The GLM with multistability suggests both limited and unlimited (i.e., up to a system’s lifetime) intrinsic predictability for chaotic and non-chaotic solutions, respectively.
2.8. Non-Chaotic Weather Systems
2.9. Suggested Future Tasks
3. Concluding Remarks
“The atmosphere possesses chaos and order; it includes, as examples, emerging organized systems (such as tornadoes) and time varying forcing from recurrent seasons”,
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Lorenz, E.N. Predictability: Does the Flap of a Butterfly’s Wings in Brazil Set off a Tornado in Texas? In Proceedings of the 139th Meeting of AAAS Section on Environmental Sciences, New Approaches to Global Weather, GARP, AAAS, Cambridge, MA, USA, 29 December 1972. [Google Scholar]
- Lorenz, E.N. The Essence of Chaos; University of Washington Press: Seattle, WA, USA, 1993; 227p. [Google Scholar]
- Gleick, J. Chaos: Making a New Science; Penguin: New York, NY, USA, 1987; 360p. [Google Scholar]
- The Nobel Committee for Physics. Scientific Background on the Nobel Prize in Physics 2021 For Groundbreaking Contributions to Our Understanding of Complex Physical Systems; The Nobel Committee for Physics: Stockholm, Sweden, 2021; Available online: https://www.nobelprize.org/prizes/physics/2021/popular-information/ (accessed on 28 June 2022).
- Maxwell, J.C. Matter and Motion; Dover: Mineola, NY, USA, 1952. [Google Scholar]
- Poincaré, H. Sur le problème des trois corps et les équations de la dynamique. Acta Math. 1890, 13, 1–270. [Google Scholar]
- Poincaré, H. Science et Méthode. Flammarion; Maitland, F., Translator; Science and Method 1908; Thomas Nelson and Sons: London, UK, 1914. [Google Scholar]
- Shen, B.-W.; Pielke, R.A., Sr.; Zeng, X.; Baik, J.-J.; Faghih-Naini, S.; Cui, J.; Atlas, R. Is Weather Chaotic? Coexistence of Chaos and Order within a Generalized Lorenz Model. Bull. Am. Meteorol. Soc. 2021, 2, E148–E158. [Google Scholar] [CrossRef]
- Shen, B.-W.; Pielke, R.A., Sr.; Zeng, X.; Baik, J.-J.; Faghih-Naini, S.; Cui, J.; Atlas, R.; Reyes, T.A. Is Weather Chaotic? Coexisting Chaotic and Non-Chaotic Attractors within Lorenz Models. In Proceedings of the 13th Chaos International Conference CHAOS 2020, Florence, Italy, 9–12 June 2020; Skiadas, C.H., Dimotikalis, Y., Eds.; Springer Proceedings in Complexity. Springer: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]
- Lorenz, E.N. The predictability of a flow which possesses many scales of motion. Tellus 1969, 21, 289–307. [Google Scholar] [CrossRef]
- Lorenz, E.N. Investigating the Predictability of Turbulent Motion. In Statistical Models and Turbulence, Proceedings of the symposium held at the University of California, San Diego, CA, USA, 15–21 July 1971; Springer: Berlin/Heidelberg, Germany, 1972; pp. 195–204. [Google Scholar]
- Lorenz, E.N. Low-order models representing realizations of turbulence. J. Fluid Mech. 1972, 55, 545–563. [Google Scholar] [CrossRef]
- Lorenz, E.N. Irregularity: A fundamental property of the atmosphere. Tellus 1984, 36A, 98–110. [Google Scholar] [CrossRef]
- Lorenz, E.N. Predictability—A Problem Partly Solved. In Proceedings of the Seminar on Predictability, Reading, UK, 4–8 September 1995; ECMWF: Reading, UK, 1996; Volume 1. [Google Scholar]
- Lorenz, E.N. Designing Chaotic Models. J. Atmos. Sci. 2005, 62, 1574–1587. [Google Scholar] [CrossRef]
- Shen, B.-W.; Pielke, R.A., Sr.; Zeng, X. One Saddle Point and Two Types of Sensitivities Within the Lorenz 1963 and 1969 Models. Atmosphere 2022, 13(5), 753. [Google Scholar] [CrossRef]
- Shen, B.-W. Aggregated Negative Feedback in a Generalized Lorenz Model. Int. J. Bifurc. Chaos 2019, 29, 1950037. [Google Scholar] [CrossRef]
- Shen, B.-W. On the Predictability of 30-Day Global Mesoscale Simulations of African Easterly Waves during Summer 2006: A View with the Generalized Lorenz Model. Geosciences 2019, 9, 281. [Google Scholar] [CrossRef]
- Shen, B.-W.; Reyes, T.; Faghih-Naini, S. Coexistence of Chaotic and Non-Chaotic Orbits in a New Nine-Dimensional Lorenz Model. In Proceedings of the 11th Chaotic Modeling and Simulation International Conference, CHAOS 2018, Rome, Italy, 5–8 June 2018; Skiadas, C., Lubashevsky, I., Eds.; Springer Proceedings in Complexity. Springer: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]
- Pedlosky, J. Finite-amplitude baroclinic waves with small dissipation. J. Atmos. Sci. 1971, 28, 587–597. [Google Scholar] [CrossRef]
- Pedlosky, J. Limit cycles and unstable baroclinic waves. J. Atmos. Sci. 1972, 29, 53–63. [Google Scholar] [CrossRef]
- Pedlosky, J. Geophysical Fluid Dynamics, 2nd ed.; Springer: New York, NY, USA, 1987; 710p. [Google Scholar]
- Pedlosky, J. The Effect of Beta on the Downstream Development of Unstable, Chaotic BaroclinicWaves. J. Phys. Oceanogr. 2019, 49, 2337–2343. [Google Scholar] [CrossRef]
- Shen, B.-W. On periodic solutions in the non-dissipative Lorenz model: The role of the nonlinear feedback loop. Tellus A 2018, 70, 1471912. [Google Scholar] [CrossRef]
- Faghih-Naini, S.; Shen, B.-W. Quasi-periodic orbits in the five-dimensional non-dissipative Lorenz model: The role of the extended nonlinear feedback loop. Int. J. Bifurc. Chaos 2018, 28, 1850072. [Google Scholar] [CrossRef]
- Shen, B.-W. Homoclinic Orbits and Solitary Waves within the non-dissipative Lorenz Model and KdV Equation. Int. J. Bifurc. Chaos 2020, 30, 2050257. [Google Scholar] [CrossRef]
- Shen, B.-W. Solitary Waves, Homoclinic Orbits, and Nonlinear Oscillations within the non-dissipative Lorenz Model, the inviscid Pedlosky Model, and the KdV Equation. In Proceedings of the 13th Chaos International Conference CHAOS 2020, Florence, Italy, 9–12 June 2020; Skiadas, C.H., Dimotikalis, Y., Eds.; Springer Proceedings in Complexity. Springer: Cham, Switzerland, 2021. [Google Scholar]
- Paxson, W.; Shen, B.-W. 2022: A KdV-SIR Equation and Its Analytical Solutions for Solitary Epidemic Waves. Int. J. Bifurc. Chaos 2022, 32, 2250199. [Google Scholar] [CrossRef]
- Yorke, J.; Yorke, E. Metastable chaos: The transition to sustained chaotic behavior in the Lorenz model. J. Stat. Phys. 1979, 21, 263–277. [Google Scholar] [CrossRef]
- Sprott, J.C.; Wang, X.; Chen, G. Coexistence of Point, periodic and Strange attractors. Int. J. Bifurc. Chaos 2013, 23, 1350093. [Google Scholar] [CrossRef]
- Jordan, D.W.; Smith, P. Nonlinear Ordinary Differential Equations. In An Introduction for Scientists and Engineers, 4th ed.; Oxford University Press: Oxford, UK, 2007; p. 560. [Google Scholar]
- Thompson, J.M.T.; Stewart, H.B. Nonlinear Dynamics and Chaos, 2nd ed.; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2002; p. 437. [Google Scholar]
- Grebogi, C.; McDonald, S.W.; Ott, E.; Yorke, J.A. Final state sensitivity: An obstruction to predictability. Phys. Lett. A 1983, 99, 415–418. [Google Scholar] [CrossRef]
- Leonov, G.A.; Kuznetsov, N.V. Hidden attractors in dynamical systems. from hidden oscillations in Hilbert–Kolmogorov, Aizerman, and Kalman problems to hidden chaotic attractor in Chua circuits. Int. J. Bifurc. Chaos 2014, 23, 1330002. [Google Scholar] [CrossRef]
- Lorenz, E.N. Can chaos and intransitivity lead to interannual variability? Tellus 1990, 42A, 378–389. [Google Scholar] [CrossRef]
- Lorenz, E.N. The predictability of hydrodynamic flow. Trans. N. Y. Acad. Sci. 1963, 25, 409–432. [Google Scholar] [CrossRef]
- Lai, Q.; Chen, S. Coexisting attractors generated from a new 4D smooth chaotic system. Int. J. Contr. Autom. Syst. 2016, 14, 1124–1131. [Google Scholar] [CrossRef]
- Jafari, S.; Rajagopal, K.; Hayat, T.; Alsaedi, A.; Pham, V.-T. Simplest Megastable Chaotic Oscillator. Int. J. Bifurc. Chaos 2019, 29, 1950187. [Google Scholar] [CrossRef]
- Hilborn, R.C. Chaos and Nonlinear Dynamics. In An Introduction for Scientists and Engineers, 2nd ed.; Oxford University Press: Oxford, UK, 2000; p. 650. [Google Scholar]
- Shen, B.-W. Nonlinear feedback in a five-dimensional Lorenz model. J. Atmos. Sci. 2014, 71, 1701–1723. [Google Scholar] [CrossRef]
- Shen, B.-W. Nonlinear feedback in a six-dimensional Lorenz Model: Impact of an additional heating term. Nonlin. Processes Geophys. 2015, 22, 749–764. [Google Scholar] [CrossRef]
- Shen, B.-W. Hierarchical scale dependence associated with the extension of the nonlinear feedback loop in a seven-dimensional Lorenz model. Nonlin. Processes Geophys. 2016, 23, 189–203. [Google Scholar] [CrossRef]
- Shen, B.-W. On an extension of the nonlinear feedback loop in a nine-dimensional Lorenz model. Chaotic Modeling Simul. 2017, 2, 147–157. [Google Scholar]
- Reyes, T.; Shen, B.-W. A Recurrence Analysis of Chaotic and Non-Chaotic Solutions within a Generalized Nine-Dimensional Lorenz Model. Chaos Solitons Fractals 2019, 125, 1–12. [Google Scholar] [CrossRef]
- Cui, J.; Shen, B.-W. A Kernel Principal Component Analysis of Coexisting Attractors within a Generalized Lorenz Model. Chaos Solitons Fractals 2021, 146, 110865. [Google Scholar] [CrossRef]
- Shen, B.-W.; Pielke, R.A., Sr.; Zeng, X.; Cui, J.; Faghih-Naini, S.; Paxson, W.; Atlas, R. Three Kinds of Butterfly Effects within Lorenz Models. Encyclopedia 2022, 2, 1250–1259. [Google Scholar] [CrossRef]
- Wolf, A.; Swift, J.B.; Swinney, H.L.; Vastano, J.A. Determining Lyapunov exponents from a time series. Phys. D Nonlinear Phenom. 1985, 16, 285–317. [Google Scholar] [CrossRef]
- Eckhardt, B.; Yao, D. Local Lyapunov exponents in chaotic systems. Phys. D Nonlinear Phenom. 1993, 65, 100–108. [Google Scholar] [CrossRef]
- Nese, J.M. Quantifying local predictability in phase space. Phys. D Nonlinear Phenom. 1989, 35, 237–250. [Google Scholar] [CrossRef]
- Slingo, J.; Palmer, T. Uncertainty in weather and climate prediction. Philos. Trans. R. Soc. A 2011, 369A, 4751–4767. [Google Scholar] [CrossRef]
- Lewis, J. Roots of ensemble forecasting. Mon. Weather. Rev. 2005, 133, 1865–1885. [Google Scholar] [CrossRef]
- Orszag, S.A. Analytical theories of turbulence. J. Fluid Mech. 1970, 41, 363–386. [Google Scholar] [CrossRef]
- Orszag, S.A. Fluid Dynamics; Balian, R., Peuble, J.L., Eds.; Gordon and Breach: London, UK, 1977. [Google Scholar]
- Leith, C.E. Atmospheric predictability and two-dimensional turbulence. J. Atmos. Sci. 1971, 28, 145–161. [Google Scholar] [CrossRef]
- Leith, C.E.; Kraichnan, R.H. Predictability of turbulent flows. J. Atmos. Sci. 1972, 29, 1041–1058. [Google Scholar] [CrossRef]
- Lilly, D.K. Numerical simulation of two-dimensional turbulence. Phys. Fluids 1969, 12 (Suppl. 2), 240–249. [Google Scholar] [CrossRef]
- Lilly, D.K. Numerical simulation studies of two-dimensional turbulence: II. Stability and predictability studies. Geophys. Fluid Dyn. 1972, 4, 1–28. [Google Scholar] [CrossRef]
- Lilly, K.D. Lectures in Sub-Synoptic Scales of Motions and Two-Dimensional Turbulence. In Dynamic Meteorology; Morel, P., Ed.; Reidel: Boston, MA, USA, 1973; pp. 353–418. [Google Scholar]
- Vallis, G. Atmospheric and Oceanic Fluid Dynamics; Cambridge University Press: Cambridge, UK, 2006; p. 745. [Google Scholar]
- Shen, B.-W.; Pielke, R.A., Sr.; Zeng, X. A Note on Lorenz’s and Lilly’s Empirical Formulas for Predictability Estimates. ResearchGate 2022, preprint. [Google Scholar] [CrossRef]
- Ghil, M.; Read, P.; Smith, L. Geophysical flows as dynamical systems: The influence of Hide’s experiments. Astron. Geophys. 2010, 51, 4.28–4.35. [Google Scholar] [CrossRef]
- Read, P. Application of Chaos to Meteorology and Climate. In The Nature of Chaos; Mullin, T., Ed.; Clarendo Press: Oxford, UK, 1993; pp. 222–260. [Google Scholar]
- Legras, B.; Ghil, M. Persistent anomalies, blocking, and variations in atmospheric predictability. J. Atmos. Sci. 1985, 42, 433–471. [Google Scholar] [CrossRef]
- Patil, D.J.; Hunt, B.R.; Kalnay, E.; Yorke, J.A.; Ott, E. Local low-dimensionality of atmospheric dynamics. Phys. Rev. Lett. 2001, 86, 5878–5881. [Google Scholar] [CrossRef]
- Oczkowski, M.; Szunyogh, I.; Patil, D.J. Mechanisms for the Development of Locally Low-Dimensional Atmospheric Dynamics. J. Atmos. Sci. 2005, 62, 1135–1156. [Google Scholar] [CrossRef]
- Ott, E.; Hunt, B.R.; Szunyogh, I.; Corazza, M.; Kalnay, E.; Patil, D.J.; Yorke, J. Exploiting Local Low Dimensionality of the Atmospheric Dynamics for Efficient Ensemble Kalman Filtering. 2002. Available online: https://doi.org/10.48550/arXiv.physics/0203058 (accessed on 1 November 2022).
- Zeng, X.; Pielke, R.A., Sr.; Eykholt, R. Chaos theory and its applications to the atmosphere. Bull. Am. Meteorol. Soc. 1993, 74, 631–644. [Google Scholar] [CrossRef]
- Ghil, M. A Century of Nonlinearity in the Geosciences. Earth Space Sci. 2019, 6, 1007–1042. [Google Scholar] [CrossRef]
- Charney, J.G.; DeVore, J.G. Multiple flow equilibria in the atmosphere and blocking. J. Atmos. Sci. 1979, 36, 1205–1216. [Google Scholar] [CrossRef]
- Crommelin, D.T.; Opsteegh, J.D.; Verhulst, F. A mechanism for atmospheric regime behavior. J. Atmos. Sci. 2004, 61, 1406–1419. [Google Scholar] [CrossRef]
- Ghil, M.; Robertson, A.W. “Waves” vs. “particles” in the atmosphere’s phase space: A pathway to long-range forecasting? Proc. Natl. Acad. Sci. USA 2002, 99 (Suppl. 1), 2493–2500. [Google Scholar] [CrossRef]
- Renaud, A.; Nadeau, L.-P.; Venaille, A. Periodicity Disruption of a Model Quasibiennial Oscillation of Equatorial Winds. Phys. Rev. Lett. 2019, 122, 214504. [Google Scholar] [CrossRef]
- Ramesh, K.; Murua, J.; Gopalarathnam, A. Limit-cycle oscillations in unsteady flows dominated by intermittent leading-edge vortex shedding. J. Fluids Struct. 2015, 55, 84–105. [Google Scholar] [CrossRef]
- Goler, R.A.; Reeder, M.J. The generation of the morning glory. J. Atmos. Sci. 2004, 61, 1360–1376. [Google Scholar] [CrossRef]
- Wu, Y.-L.; Shen, B.-W. An evaluation of the parallel ensemble empirical mode decomposition method in revealing the role of downscaling processes associated with African easterly waves in tropical cyclone genesis. J. Atmos. Ocean. Technol. 2016, 33, 1611–1628. [Google Scholar] [CrossRef]
- Shen, B.-W.; Cheung, S.; Wu, Y.; Li, F.; Kao, D. Parallel Implementation of the Ensemble Empirical Mode Decomposition (PEEMD) and Its Application for Earth Science Data Analysis. Comput. Sci. Eng. 2017, 19, 49–57. [Google Scholar] [CrossRef]
- Shilnikov, L.P. On a new type of bifurcation of multi-dimensional dynamical systems. Dokl. Akad. Nauk SSSR 1969, 10, 1368–1371. [Google Scholar]
- Gonchenko, S.V.; Turaev, D.V.; Shilnikov, L.P. Dynamical phenomena in multidimensional systems with a structurally unstable homoclinic Poincar6 curve. Russ. Acad. Sci. Dokl. Mat. 1993, 47, 410–415. [Google Scholar]
- Belhaq, M.; Houssni, M.; Freire, E.; Rodriguez-Luis, A.J. Asymptotics of Homoclinic Bifurcation in a Three-Dimensional System. Nonlinear Dyn. 2000, 21, 135–155. [Google Scholar] [CrossRef]
- Shimizu, T.; Morioka, N. On the bifurcation of a symmetric limit cycle to an asymmetric one in a simple model. Phys. Lett. A 1980, 76, 201–204. [Google Scholar] [CrossRef]
- Shil’nilov, A.L. On bifurcations of a Lorenz-like attractor in the Shimizu-Morioka system. Phys. D Nonlinear Phenom. 1992, 62, 332–346. [Google Scholar]
- Shil’nikov, A.L.; Shil’nikov, L.P.; Turaev, D.V. Normal Forms and Lorenz Attractors. Int. J. Bifurc. Chaos 1993, 3, 1123–1139. [Google Scholar] [CrossRef]
- Gonchenko, S.; Kazakov, A.; Turaev, D.; Shilnikov, A.L. Leonid Shilnikov and mathematical theory of dynamical chaos. Chaos 2022, 32, 010402. [Google Scholar] [CrossRef] [PubMed]
- Simonnet, E.; Ghil, M.; Dijkstra, H. Homoclinic bifurcation in the quasi-geostrophic double-gyre circulation. J. Mar. Res. 2005, 63, 931–956. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Definitions | Recommendations |
|---|---|---|
| 1st kind of attractor coexistence | The coexistence of chaotic and steady-state solutions | [9,10,28] |
| 2nd kind of attractor coexistence | The coexistence of nonlinear oscillatory and steady-state solutions | [9,10] |
| attractor | The smallest attracting point set that, itself, cannot be decomposed into two or more subsets with distinct basins of attraction. | [31] |
| autonomous | A system of ODEs is autonomous if time does not explicitly appear within the equations. | [32] |
| bifurcation | It occurs when the structure of a system’s solution significantly changes as a control parameter varies. | [32,33] |
| butterfly effect | The phenomenon that a small alteration in the state of a dynamical system will cause subsequent states to differ greatly from the states that would have followed without the alteration. | [3] |
| basin of attraction | As time advances, orbits initialized within a basin tend asymptotically to the attractor lying within the basin. The set of initial conditions leading to a given attractor. | [33] |
| chaos | Bounded aperiodic orbits exhibit a sensitive dependence on ICs. | [3] |
| final state sensitivity | Nearby orbits settle to one of multiple attractors for a finite but arbitrarily long time. | [34] |
| hidden attractor | An attractor is called a hidden attractor if its basin of attraction does not intersect with small neighborhoods of equilibria. | [35] |
| intransitivity | A specific type of solution lasts forever. | [36] |
| intrinsic predictability | Predictability that is only dependent on flow itself. | [9,37] |
| limit cycle | A nonlinear oscillatory solution; an isolated closed orbit | [32] |
| monostability | The appearance of single-type solutions | [9,10,17] |
| multistability | A system with multistability contains more than one bounded attractor that depends only on initial conditions. For example, the coexistence of two types of solutions. | [9,10,17,38,39] |
| non-autonomous | Variable time ( appears on the right-hand side of the equations. | [32] |
| phase space | Within a system of the first-order ODEs, a phase space or state space can be constructed using time-dependent variables as coordinates. | [40] |
| practical predictability | Predictability that is limited by imperfect initial conditions and/or (mathematical) formulas. | [9,37] |
| recurrence | Defined when a trajectory returns back to the neighborhood of a previously visited state. Recurrence may be viewed as a generalization of “periodicity” that braces quasi-periodicity with multiple frequencies and chaos. | [33] |
| sensitive dependence | The property characterizing an orbit if most other orbits that pass close to it at some point do not remain close to it as time advances. | [3] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, B.-W.; Pielke, R., Sr.; Zeng, X.; Cui, J.; Faghih-Naini, S.; Paxson, W.; Kesarkar, A.; Zeng, X.; Atlas, R. The Dual Nature of Chaos and Order in the Atmosphere. Atmosphere 2022, 13, 1892. https://doi.org/10.3390/atmos13111892
Shen B-W, Pielke R Sr., Zeng X, Cui J, Faghih-Naini S, Paxson W, Kesarkar A, Zeng X, Atlas R. The Dual Nature of Chaos and Order in the Atmosphere. Atmosphere. 2022; 13(11):1892. https://doi.org/10.3390/atmos13111892
Chicago/Turabian StyleShen, Bo-Wen, Roger Pielke, Sr., Xubin Zeng, Jialin Cui, Sara Faghih-Naini, Wei Paxson, Amit Kesarkar, Xiping Zeng, and Robert Atlas. 2022. "The Dual Nature of Chaos and Order in the Atmosphere" Atmosphere 13, no. 11: 1892. https://doi.org/10.3390/atmos13111892