

Performance Analysis of a Portable Low-Cost SDR-Based Ionosonde

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Basic Hardware and Software
- -
- A USRP N200 Kit (Universal Software Radio Peripheral) designed and produced by Ettus Research [32] with LFTX [33] and LFRX [34] daughterboards installed. The USRP N200 Kit is a software-defined radio and represents the core part of the ISDR. The LFRX and LFTX daughterboards are used as the RF frontends for the signal RX and TX paths. The SDR allows converting the digital representation of the TX signal waveform in the baseband to its analog counterpart on the selected carrier frequency. Additionally, the analog signal coming from the RX antenna is digitized and down converted to the baseband, allowing for the postprocessing of the signal to be performed in a digital domain with the help of the proprietary software.
- -
- The ZX80-DR230+ RF switch manufactured by Mini-Circuits [35] is used to protect the RX path of USRP N200 Kit while transmitting the signal.
- -
- The ICOM IC-718 HF transceiver [36] with minimal modifications is used as a power amplifier.
- -
- The Sp-200-13.5 Mean Well 13.5 V/14.9 A power supply unit with PFC and forced air cooling for the powering of the transceiver [37].
- -
- A personal computer (PC) that controls USRP N200, ZX80-DR230+, and ICOM IC-718, as well as processes and records ionosphere sounding data coming from the USRP N200 Kit.
- -
- RX and TX antennas.
2.2. Extended Configuration
2.3. Ionosondes Setup at the Ukrainian Antarctic Station
2.4. Passive Ionosonde Onboard the RV “Noosfera”
3. Results
3.1. Operation Modes and Data Types of IPS-42 and ISDR
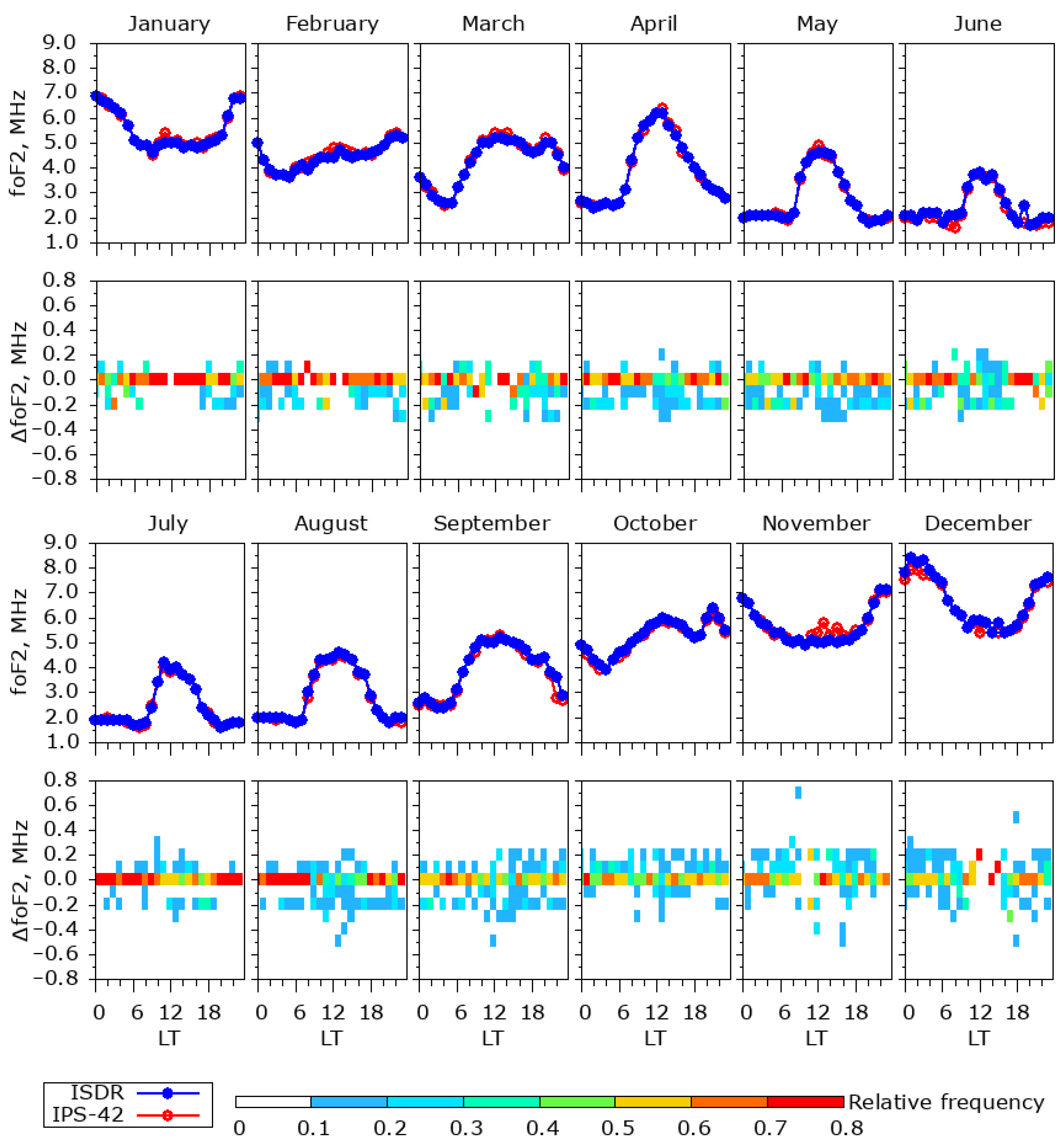
3.2. Methodology and Results of the ISDR and IPS-42 Data Comparison
- -
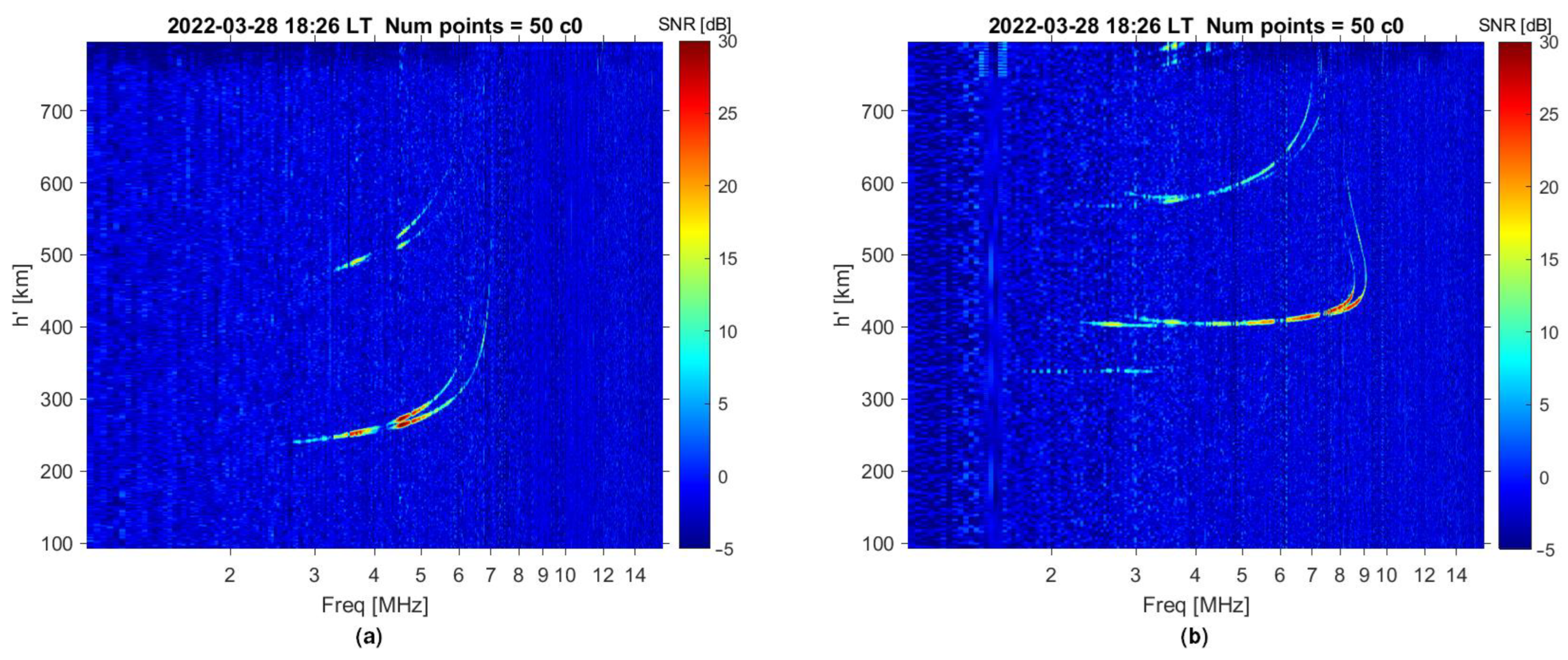
- The removal of interferences using the Non-local Means Denoising algorithm [49]. Additionally, on the IPS-42 ionograms, the frequency and height ticks, as well as date, time, and ionosonde identification number labels, are removed by subtracting manually the created mask from the original image.
- -
- A bilinear (2D) data interpolation within the same, chosen for both ionosondes, frequency and virtual height ranges. The frequency range of 1–12 MHz and the virtual height range of 100–600 km have been selected. The number of points for each dimension is 512.
- -
- A data binarization, that is a conversion of an ionogram to a black-and-white image using the selected threshold, so that the ionogram images from different instruments can be compared directly.
4. Discussion
5. Conclusions
- -
- Equipping a large number of geophysical observatories with passive SDR-based ionosondes. In particular, when using passive devices, ionosondes can be installed at observatories where, due to problems with the electromagnetic compatibility, the installation of active devices is prohibitive.
- -
- Building regional networks of ionosondes, which can be used to study the ionospheric dynamics, such as TIDs, and provide support to operational systems, such as JORN. Until now, similar studies have been implemented using spaced HF receivers operating in the CW mode [54,55,58,59] or the sparse networks of ionosondes [60,61]. However, for the detailed diagnostics of TIDs using ionosondes, the spacing between observation points must be comparable with the wavelengths of the disturbances, i.e., a few hundred kilometers or less. The regional networks of the SDR-based ionosondes, in which a large number of passive units are located around several active devices, can significantly increase the information content of the monitoring of the inhomogeneous structure of the ionosphere. The joint use of ionosonde networks and existing dense networks of GNSS receivers can further improve the capabilities of the ionospheric modelling and diagnostics.
- -
- Standard data formats provided by SDR-based ionosondes and the flexibility of their operation modes facilitates the development of ionogram autoscaling programs. For example, such a program based on an artificial neural network for the analysis of the ionograms obtained using the IPS-42 and ISDR installed at the UAS is under development [62]. The availability of ionograms for more than 30 years of observations at the UAS and the results of their manual scaling provide a great opportunity for the implementation of ionospheric models using machine learning techniques.
- -
- It is not difficult to adapt the SDR-based ionosondes to local ionospheric conditions due to their low-cost and ease of deployment. For example, it is possible to create ionosondes and networks of ionosondes in the polar regions, at the equator and near heating facilities [63,64], where it is important to track highly dynamic ionospheric processes.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Appleton, E.V.; Barnett, M.A.F. Local reflections of wireless waves from the upper atmosphere. Nature 1925, 25, 333–334. [Google Scholar] [CrossRef]
- Breit, G.; Tuve, M.A. A Test of the Existence of the Conducting Layer. Phys. Rev. 1926, 28, 554–575. [Google Scholar] [CrossRef]
- Gilliland, T.R. Ionospheric investigations. Nature 1934, 134, 379. [Google Scholar] [CrossRef]
- Bibl, K. Evolution of the ionosonde. Ann. Geophys. 1998, 41, 667–680. [Google Scholar] [CrossRef]
- Bibl, K.; Reinisch, B.W. The universal digital ionosonde. Radio Sci. 1978, 13, 519–530. [Google Scholar] [CrossRef]
- Reinisch, B.W.; Galkin, I.A.; Khmyrov, G.M.; Kozlov, A.V.; Bibl, K.; Lisysyan, I.A.; Cheney, G.P.; Huang, X.; Kitrosser, D.F.; Paznukhov, V.V.; et al. New Digisonde for research and monitoring applications. Radio Sci. 2009, 44, RS0A24. [Google Scholar] [CrossRef]
- Themens, D.; Reid, B.; Elvidge, S. ARTIST ionogram autoscaling confidence scores: Best practices. URSI Radio Sci. Lett. 2022, 4, 1–5. [Google Scholar] [CrossRef]
- Reinisch, B.W.; Galkin, I.A. Global Ionospheric Radio Observatory (GIRO). Earth Planets Space 2011, 63, 377–381. [Google Scholar] [CrossRef] [Green Version]
- Gao, S.; MacDougall, J.W. A dynamic ionosonde design using pulse coding. Can. J. Phys. 1992, 69, 1184–1189. [Google Scholar] [CrossRef]
- Wright, J.W.; Pitteway, M.L.V. Real-time acquisition and interpretation capabilities of the Dynasonde 2. Determination of magnetoionic mode and echolocation using a small spaced receiving array. Radio Sci. 1979, 14, 827–835. [Google Scholar] [CrossRef]
- Zuccheretti, E.; Tutone, G.; Sciacca, U.; Bianchi, C.; Baskaradas, J.A. The new AIS-INGV digital ionosonde. Ann. Geophys. 2003, 46, 647–659. [Google Scholar] [CrossRef]
- Chen, G.; Zhao, Z.; Li, S.; Shi, S. WIOBSS: The Chinese low-power digital ionosonde for ionospheric backscattering detection. Adv. Space Res. 2009, 43, 1343–1348. [Google Scholar] [CrossRef]
- Huang, S.; Zhao, Z.; Yang, G.; Chen, G.; Li, T.; Li, N.; Yang, J. A new design of low-power portable digital ionosonde. Adv. Space Res. 2013, 51, 388–394. [Google Scholar] [CrossRef]
- Szwabowski, M.; Dziak-Jankowska, B.; Pożoga, M.; Tomasik, Ł. The 2009–2012 Ionosonde and IRI2012 Variability of foF2, hmF2, M3000F2, B0, B1 Parameters over Warsaw. Acta Geophys. 2016, 64, 1211–1223. [Google Scholar] [CrossRef] [Green Version]
- Rideout, W.; Coster, A. Automated GPS processing for global total electron content data. GPS Solut. 2006, 10, 219–228. [Google Scholar] [CrossRef]
- Vierinen, J.; Coster, A.J.; Rideout, W.C.; Erickson, P.J.; Norberg, J. Statistical framework for estimating GNSS bias. Atmos. Meas. Tech. Discuss. 2015, 8, 9373–9398. [Google Scholar] [CrossRef] [Green Version]
- Ferreira, A.A.; Borges, R.A.; Paparini, B.; Ciraolo, L.; Radicella, S.M. Short-term estimation of GNSS TEC using a neural network model in Brazil. Adv. Space Res. 2017, 60, 1765–1776. [Google Scholar] [CrossRef]
- Nie, Y. A Software Radio Based Ionosonde Using GNU Radio; Western University: London, ON, Canada, 2011; pp. 1–99. Available online: https://ir.lib.uwo.ca/digitizedtheses/3254 (accessed on 1 December 2022).
- Vierinen, J. On Statistical Theory of Radar Measurements. A Dissertation for the Degree of Doctor of Science, Aalto University, Espoo, Finland, 2012. [Google Scholar]
- Mendoza, J.J.B.; Ruiz, C.F.Q.; Jaramillo, C.R.P. Implementation of an Electronic Ionosonde to Monitor the Earth’s Ionosphere via a Projected Column through USRP. Sensors 2017, 17, 946. [Google Scholar] [CrossRef] [Green Version]
- Floer, M. Design and Implementation of a Software Defined Ionosonde; The Arctic University of Norway: Tromsø, Norway, 2020; Available online: https://munin.uit.no/bitstream/handle/10037/19423/thesis.pdf?sequence=2&isAllowed=y (accessed on 1 December 2022).
- Software Defined Radio Ionosonde. Available online: https://github.com/jvierine/ionosonde (accessed on 15 July 2022).
- Shindin, A.V.; Moiseev, S.P.; Vybornov, F.I.; Grechneva, K.K.; Pavlova, V.A.; Khashev, V.R. The Prototype of a Fast Vertical Ionosonde Based on Modern Software-Defined Radio Devices. Remote Sens. 2022, 14, 547. [Google Scholar] [CrossRef]
- Galkin, I.A.; Reinisch, B.W.; Osokov, G.A.; Zazobina, E.G.; Neshyba, S.P. Feedback neural networks for ARTIST ionogram processing. Radio Sci. 1996, 31, 1119–1128. [Google Scholar] [CrossRef]
- Galkin, I.A.; Reinisch, B.W. The new ARTIST 5 for all digisondes. INAG Bull. 2008, 69, 1–8. [Google Scholar]
- Scotto, C.; Pezzopane, M. Software for the automatic scaling of critical frequency f0F2 and MUF(3000)F2 from ionograms applied at the Ionospheric Observatory of Gibilmanna. Ann. Geophys. 2004, 47, 1783–1790. [Google Scholar] [CrossRef]
- Scotto, C.; Pezzopane, M. The INGV software for the automatic scaling of foF2 and MUF(3000)F2 from ionograms: A performance comparison with ARTIST 4.01 from Rome data. J. Atmos. Sol. -Terr. Phys. 2005, 67, 1063–1073. [Google Scholar] [CrossRef]
- Broom, S.M. A new ionosonde for Argentine Islands ionospheric observatory, Faraday Station. Br. Antarct. Surv. Bull. 1984, 62, 1–6. Available online: http://nora.nerc.ac.uk/id/eprint/523821/ (accessed on 15 July 2022).
- Zalizovski, A.; Koloskov, O.; Kashcheyev, A.; Kashcheyev, S.; Yampolski, Y.; Charkina, O. Doppler vertical sounding of the ionosphere at the Akademik Vernadsky station. Ukr. Antarct. J. 2020, 1, 56–68. [Google Scholar] [CrossRef]
- Zalizovski, A.V.; Kashcheyev, A.S.; Kashcheyev, S.B.; Koloskov, A.V.; Lisachenko, V.N.; Paznukhov, V.V.; Pikulik, I.I.; Sopin, A.A.; Yampolski, Y.M. A prototype of a portable coherent ionosonde. Space Sci. Technol. 2018, 24, 10–22. (In Russian) [Google Scholar] [CrossRef]
- Koloskov, O.; Kashcheyev, A.; Zalizovski, A.; Kashcheyev, S.; Lisachenko, V.; Bogomaz, O. Results of Vertical Ionospheric Sounding at the Ukrainian Antarctic Station Akademik Vernadsky. In Proceedings of the 3rd URSI AT-AP-RASC, Gran Canaria, Spain, 29 May–3 June 2022. [Google Scholar] [CrossRef]
- USRP N200 Software Defined Radio (SDR). Available online: https://www.ettus.com/all-products/un200-kit/ (accessed on 15 July 2022).
- LFTX Daughterboard 0-30 MHz Tx. Available online: https://www.ettus.com/all-products/lftx/ (accessed on 15 July 2022).
- LFRX Daughterboard 0-30 MHz Rx. Available online: https://www.ettus.com/all-products/lfrx/ (accessed on 15 July 2022).
- ZX80-DR230+. Available online: https://www.minicircuits.com/pdfs/ZX80-DR230+.pdf (accessed on 15 July 2022).
- IC-718 HF All Band Transceiver. Available online: https://www.icomamerica.com/en/products/amateur/hf/718/default.aspx (accessed on 15 July 2022).
- Mean Well Sp-200-13.5. Available online: https://www.meanwell-web.com/en-gb/ac-dc-single-output-enclosed-power-supply-with-pfc-sp--200--13.5 (accessed on 15 July 2022).
- UHD (USRP Hardware Driver™). Available online: https://www.ettus.com/sdr-software/uhd-usrp-hardware-driver/ (accessed on 15 July 2022).
- Schmidt, G.; Ruster, R.; Czechowsky, P. Complementary code and digital filtering for detection of weak VHF radar signals from the mesosphere. IEEE Trans. Geosci. Electron. 1979, 17, 154–161. [Google Scholar] [CrossRef]
- GPSDO Kit for USRP N200/N210. Available online: https://www.ettus.com/all-products/gpsdo-kit/ (accessed on 15 July 2022).
- Earl, G.F.; Ward, B.D. The frequency management system of the Jindalee over-the-horizon backscatter HF radar. Radio Sci. 1987, 22, 275–291. [Google Scholar] [CrossRef]
- JINDALEE Operational Radar Network. Available online: https://www.dst.defence.gov.au/innovation/jindalee-operational-radar-network (accessed on 15 July 2022).
- Wilkinson, P.; Kennewell, J.A.; Cole, D. The development of the Australian Space Forecast Centre (ASFC). Hist. Geo Space. Sci. 2018, 9, 53–63. [Google Scholar] [CrossRef] [Green Version]
- Koloskov, O.V.; Kashcheyev, A.S.; Zalizovski, A.V.; Kashcheyev, S.B.; Budanov, O.V.; Charkina, O.V.; Pikulik, I.I.; Lysachenko, V.M.; Sopin, A.O.; Reznychenko, A.I. New Digital Ionosonde Developed for Ukrainian Antarctic Station “Akademik Vernadsky”. In Proceedings of the IX International Antarctic Conference Dedicated to the 60th Anniversary of the Signing of the Antarctic Treaty in the Name of Peace and Development of International Cooperation: Physical Sciences, Kyiv, Ukraine, 14–16 May 2019. [Google Scholar]
- Koloskov, O.; Kashcheyev, A.; Zalizovski, A.; Bogomaz, O. Low-Cost SDR-Based Ionosondes as a Tool for Geospace Research. In Proceedings of the 21st International Beacon Satellite Symposium, Boston, MA, USA, 1–5 August 2022. [Google Scholar]
- Bogomaz, O.V.; Shulha, M.O.; Kotov, D.V.; Zhivolup, T.G.; Koloskov, A.V.; Zalizovski, A.V.; Kashcheyev, S.B.; Reznychenko, A.I.; Hairston, M.R.; Truhlik, V. Ionosphere over Ukrainian Antarctic Akademik Vernadsky station under minima of solar and magnetic activities, and daily insolation: Case study for June 2019. Ukr. Antarct. J. 2019, 2, 84–93. [Google Scholar] [CrossRef]
- Reznychenko, M.; Bogomaz, O.; Kotov, D.; Zhivolup, T.; Koloskov, O.; Lisachenko, V. Observation of the ionosphere by ionosondes in the Southern and Northern hemispheres during geospace events in October 2021. Ukr. Antarct. J. 2022, 20, 18–30. [Google Scholar] [CrossRef]
- Wakai, N.; Ohyama, H.; Koizumi, T. Manual of Ionogram Scaling Third Version; Radio Research Laboratory Ministry of Posts and Telecommunications: Tokyo, Japan, 1987. Available online: https://www.sws.bom.gov.au/IPSHosted/INAG/scaling/japanese_manual_v3.pdf (accessed on 24 December 2022).
- Buades, A.; Coll, B.; Morel, J.M. Non-local means denoising. Image Process. Online 2011, 1, 208–212. [Google Scholar] [CrossRef] [Green Version]
- Bellchambers, W.H.; Piggott, W.R. Ionospheric Measurements Made at Halley Bay. Nature 1958, 182, 1596–1597. [Google Scholar] [CrossRef]
- Dudeney, J.R.; Piggott, W.R. Antarctic Ionospheric Research. In Upper Atmosphere Research in Antarctica; Lanzerotti, L.J., Park, C.G., Eds.; AGU: Washington, DC, USA, 1978; Volume 29, pp. 200–235. [Google Scholar] [CrossRef]
- Kohl, H.; King, J.W. Atmospheric winds between 100 and 700 km and their effects on the ionosphere. J. Atmos. Terr. Phys. 1967, 29, 1045–1062. [Google Scholar] [CrossRef]
- Chang, L.C.; Liu, H.; Miyoshi, Y.; Chen, C.; Chang, F.; Lin, C.; Liu, J.; Sun, Y. Structure and origins of the Weddell Sea Anomaly from tidal and planetary wave signatures in FORMOSAT-3/COSMIC observations and GAIA GCM simulations. J. Geophys. Res. Space Phys. 2015, 120, 1325–1340. [Google Scholar] [CrossRef]
- Galushko, V.G.; Kashcheyev, A.S.; Kashcheyev, S.B.; Koloskov, A.V.; Pikulik, I.I.; Yampolski, Y.M.; Litvinov, V.A.; Milinevsky, G.P.; Rakusa-Suszczewski, S. Bistatic HF diagnostics of TIDs over the Antarctic Peninsula. J. Atmos. Sol. -Terr. Phys. 2007, 69, 403–410. [Google Scholar] [CrossRef]
- Paznukhov, V.V.; Sopin, A.A.; Galushko, V.G.; Kashcheyev, A.S.; Koloskov, A.V.; Yampolski, Y.M.; Zalizovski, A.V. Occurrence and characteristics of Traveling Ionospheric Disturbances in the Antarctic Peninsula region. J. Geophys. Res. Space Phys. 2022, 127, e2022JA030895. [Google Scholar] [CrossRef]
- MIMO Cable. Available online: https://www.ettus.com/all-products/mimo-cbl/ (accessed on 15 July 2022).
- Bibl, K.; Pfister, W.; Reinisch, B.W.; Sales, G.S. Velocities of small and medium scale ionospheric irregularities deduced from Doppler and arrival angle measurements. Space Res. 1975, 15, 405–411. [Google Scholar]
- Lastovicka, J.; Chum, J. A review of results of the international ionospheric Doppler sounder network. Adv. Space Res. 2017, 60, 1629–1643. [Google Scholar] [CrossRef]
- Zalizovski, A.V.; Yampolski, Y.M.; Mishin, E.; Kashcheyev, S.B.; Sopin, A.O.; Koloskov, A.V.; Lisachenko, V.N.; Reznychenko, A.I. Multi-position facility for HF Doppler sounding of ionospheric inhomogeneities in Ukraine. Radio Sci. 2021, 56, e2021RS007303. [Google Scholar] [CrossRef]
- Verhulst, T.; Altadill, D.; Mielich, J.; Reinisch, B.; Galkin, I.; Mouzakis, A.; Belehaki, A.; Burešová, D.; Stankov, S.; Blanch, E.; et al. Vertical and oblique HF sounding with a network of synchronised ionosondes. Adv. Space Res. 2017, 60, 1644–1656. [Google Scholar] [CrossRef]
- Reinisch, B.; Galkin, I.; Belehaki, A.; Paznukhov, V.; Huang, X.; Altadill, D.; Buresova, D.; Mielich, J.; Verhulst, T.; Stankov, S.; et al. Pilot ionosonde network for identification of traveling ionospheric disturbances. Radio Sci. 2018, 53, 365–378. [Google Scholar] [CrossRef]
- Bogomaz, O.; Shulha, M.; Kotov, D.; Koloskov, A.; Zalizovski, A. An artificial neural network for analysis of ionograms obtained by ionosonde at the Ukrainian Antarctic Akademik Vernadsky station. Ukr. Antarct. J. 2020, 2, 59–67. [Google Scholar] [CrossRef]
- Stubbe, P.; Kopka, H.; Lauche, H.; Rietveld, M.T.; Brekke, A.; Holt, O.; Jones, T.B.; Robinson, T.; Hedberg, A.; Thidé, B.; et al. Ionospheric modification experiments in northern Scandinavia. Atmos. Terr. Phys. 1982, 44, 1025–1041. [Google Scholar] [CrossRef]
- Bailey, P.G.; Worthington, N.C. History and Applications of HAARP Technologies: The High Frequency Active Auroral Research Program. Volume 2: Electrochemical Technologies, Conversion Technologies and Thermal Management. In Proceedings of the Thirty-Second Intersociety Energy Conversion Engineering Conference, Honolulu, HI, USA, 27 July–1 August 1997; pp. 1317–1322. [Google Scholar] [CrossRef]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koloskov, O.; Kashcheyev, A.; Bogomaz, O.; Sopin, A.; Gavrylyuk, B.; Zalizovski, A. Performance Analysis of a Portable Low-Cost SDR-Based Ionosonde. Atmosphere 2023, 14, 159. https://doi.org/10.3390/atmos14010159
Koloskov O, Kashcheyev A, Bogomaz O, Sopin A, Gavrylyuk B, Zalizovski A. Performance Analysis of a Portable Low-Cost SDR-Based Ionosonde. Atmosphere. 2023; 14(1):159. https://doi.org/10.3390/atmos14010159
Chicago/Turabian StyleKoloskov, Oleksandr, Anton Kashcheyev, Oleksandr Bogomaz, Andriy Sopin, Bogdan Gavrylyuk, and Andriy Zalizovski. 2023. "Performance Analysis of a Portable Low-Cost SDR-Based Ionosonde" Atmosphere 14, no. 1: 159. https://doi.org/10.3390/atmos14010159
APA StyleKoloskov, O., Kashcheyev, A., Bogomaz, O., Sopin, A., Gavrylyuk, B., & Zalizovski, A. (2023). Performance Analysis of a Portable Low-Cost SDR-Based Ionosonde. Atmosphere, 14(1), 159. https://doi.org/10.3390/atmos14010159