
Examining the Effectiveness of Doppler Lidar-Based Observation Nudging in WRF Simulation for Wind Field: A Case Study over Osaka, Japan



Abstract
:1. Introduction
2. Methods and Data
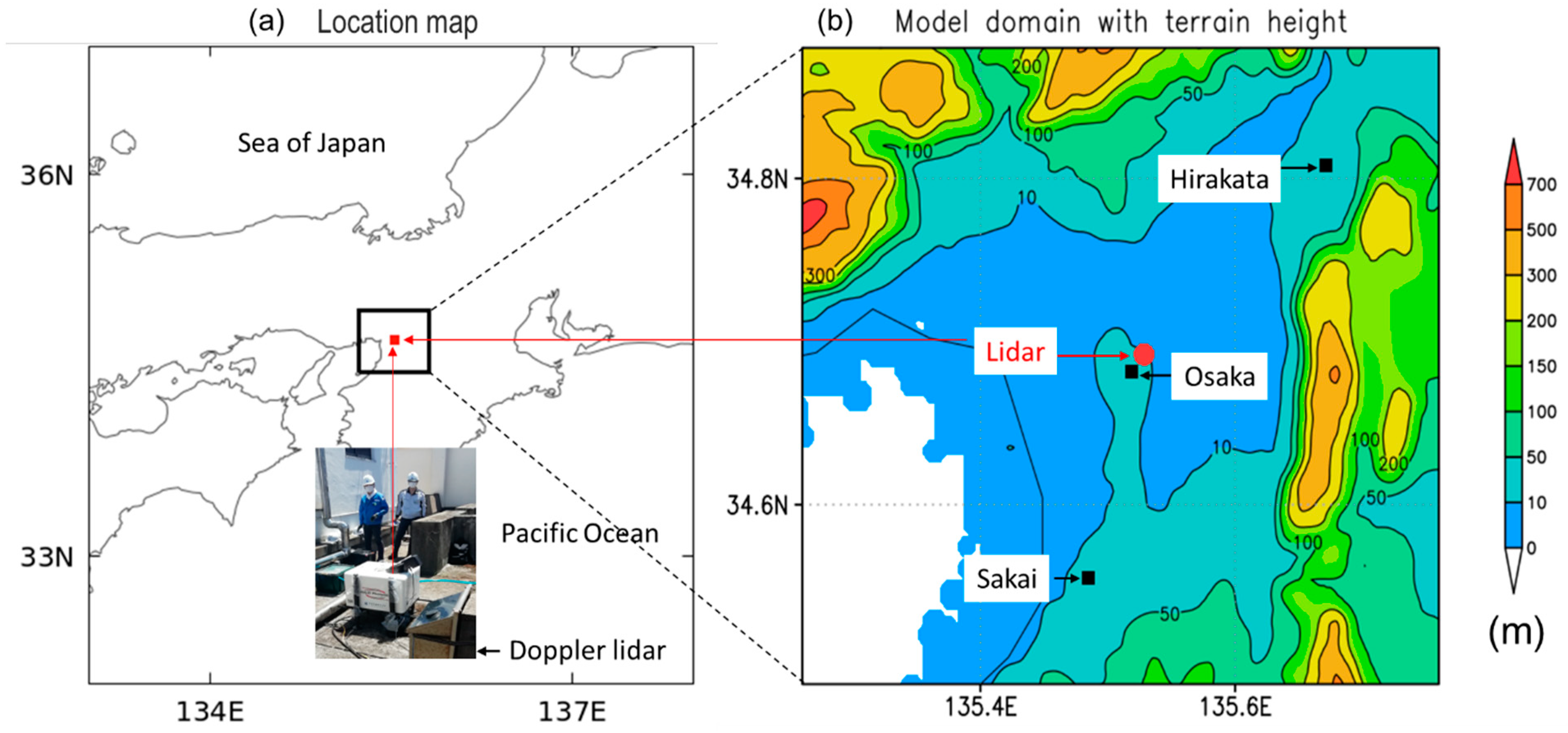
2.1. Study Region and the Doppler Lidar Setup
2.2. Model Configuration and Experimental Design
2.3. Observation Nudging
2.4. Analysis Method
3. Results
3.1. Performance Evaluation
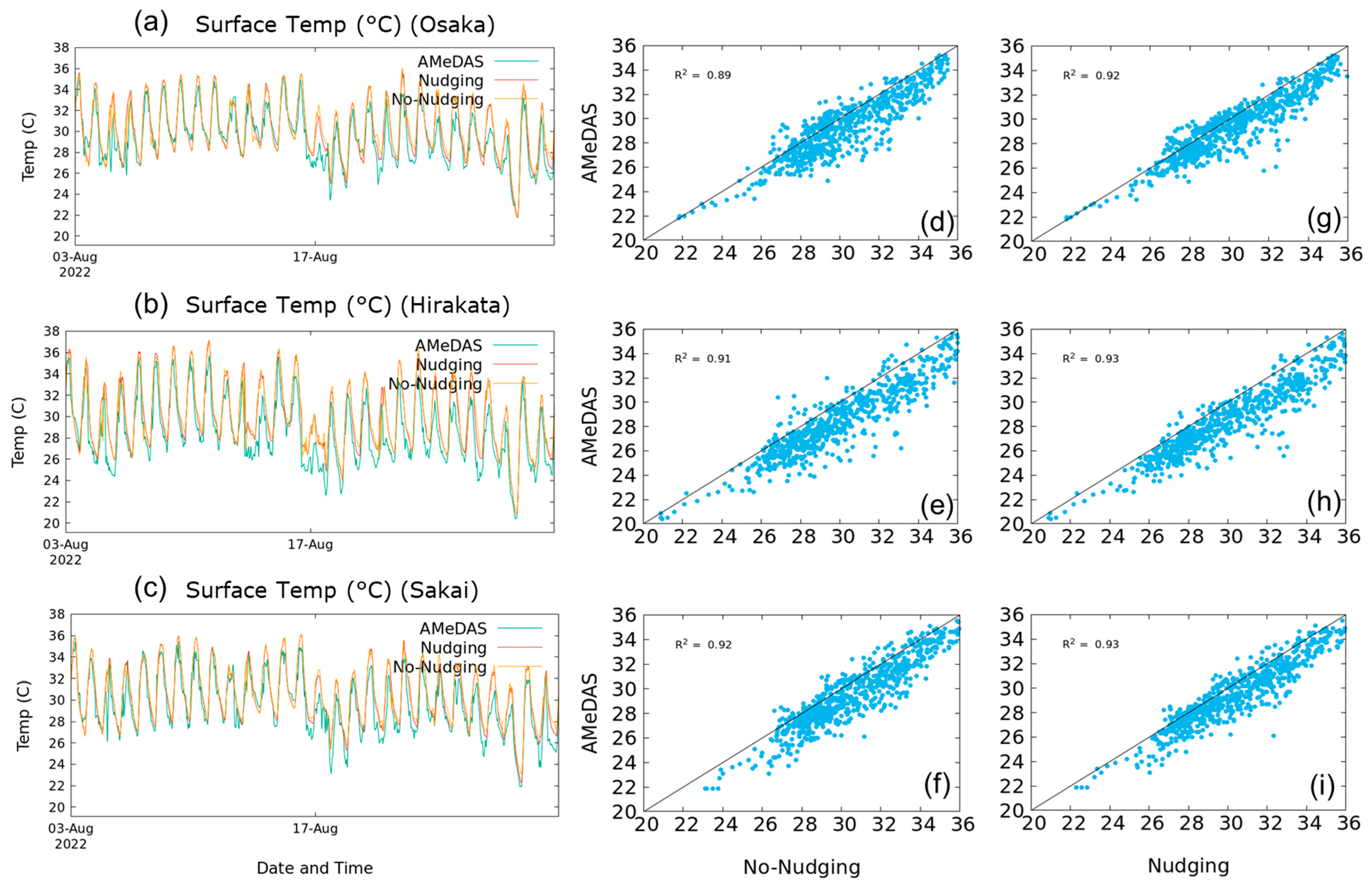
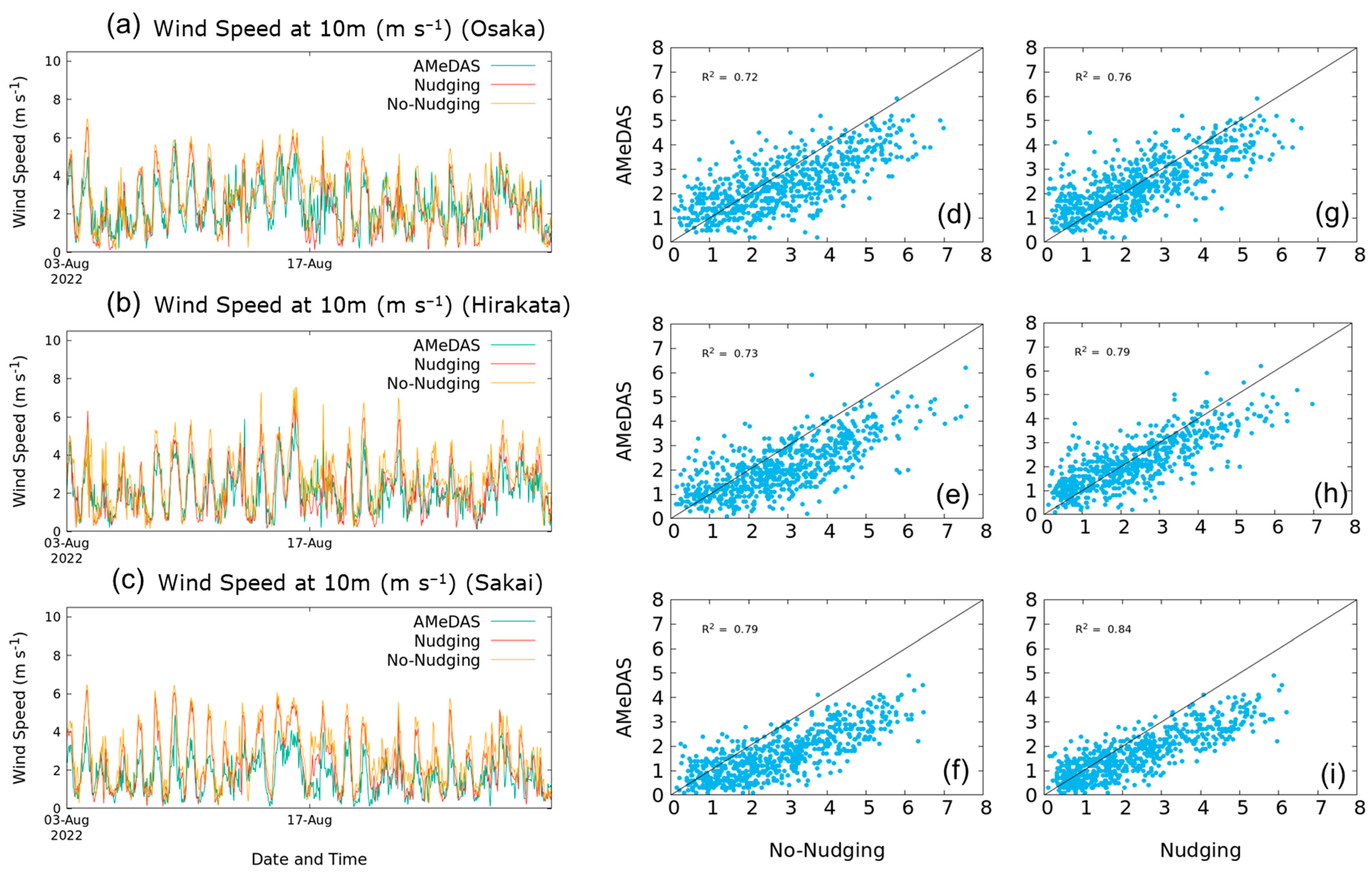
3.1.1. Comparison with AMeDAS Observation
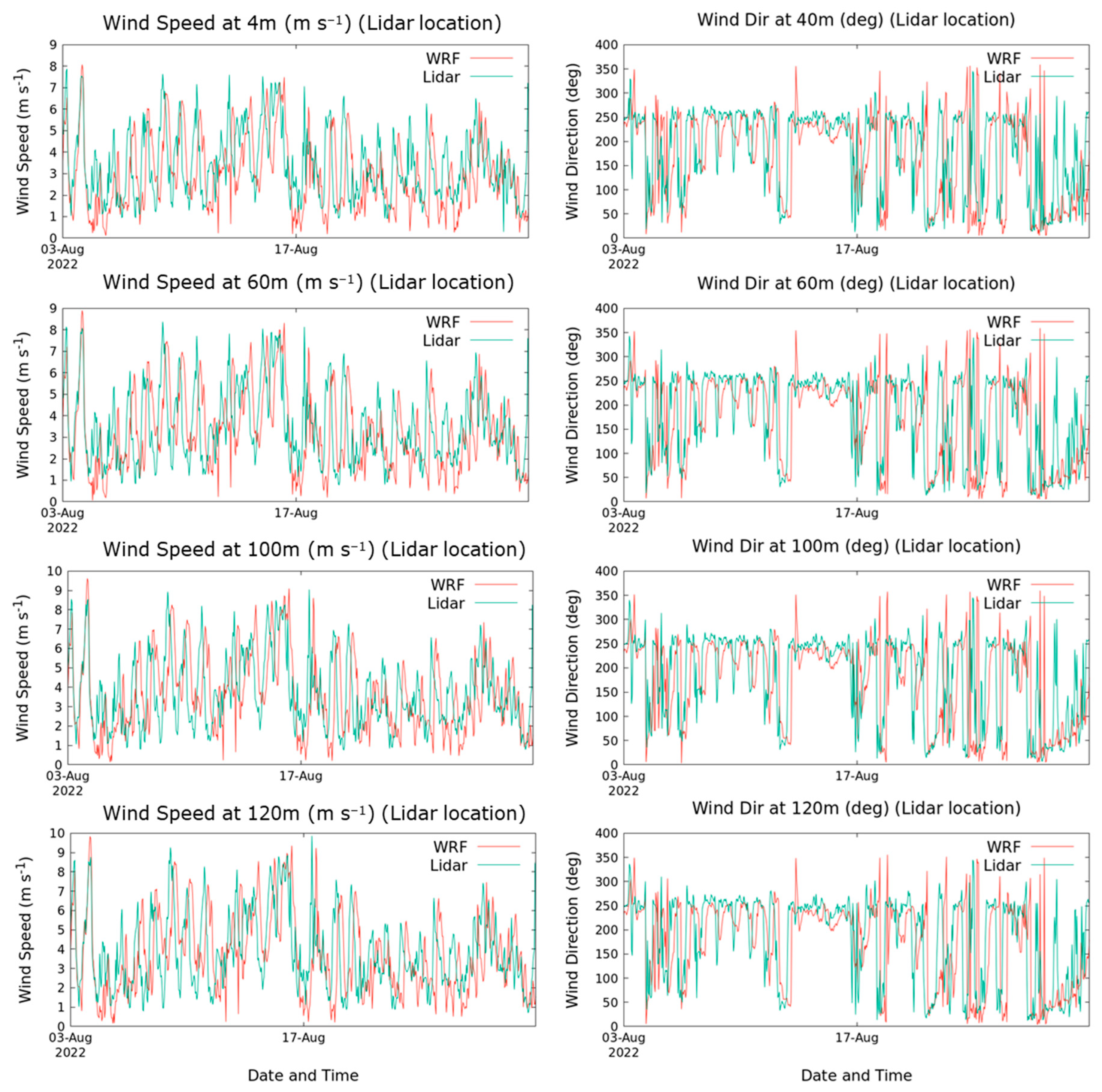
3.1.2. Comparison with Lidar Observation
3.2. Analysis on the Simulated Results
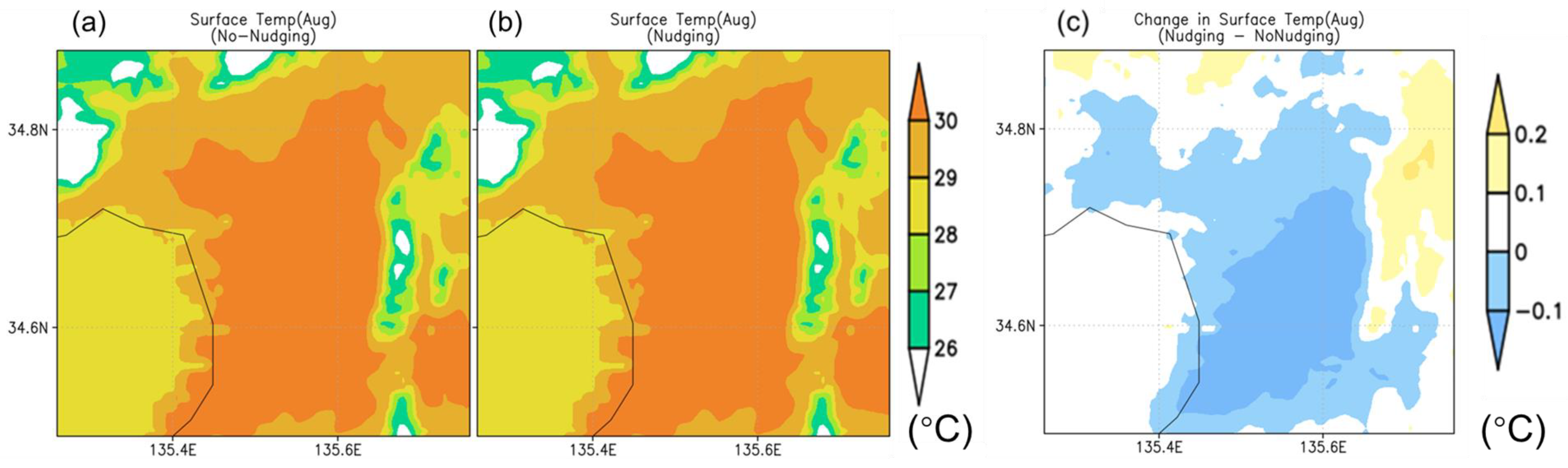
3.2.1. Surface Temperature
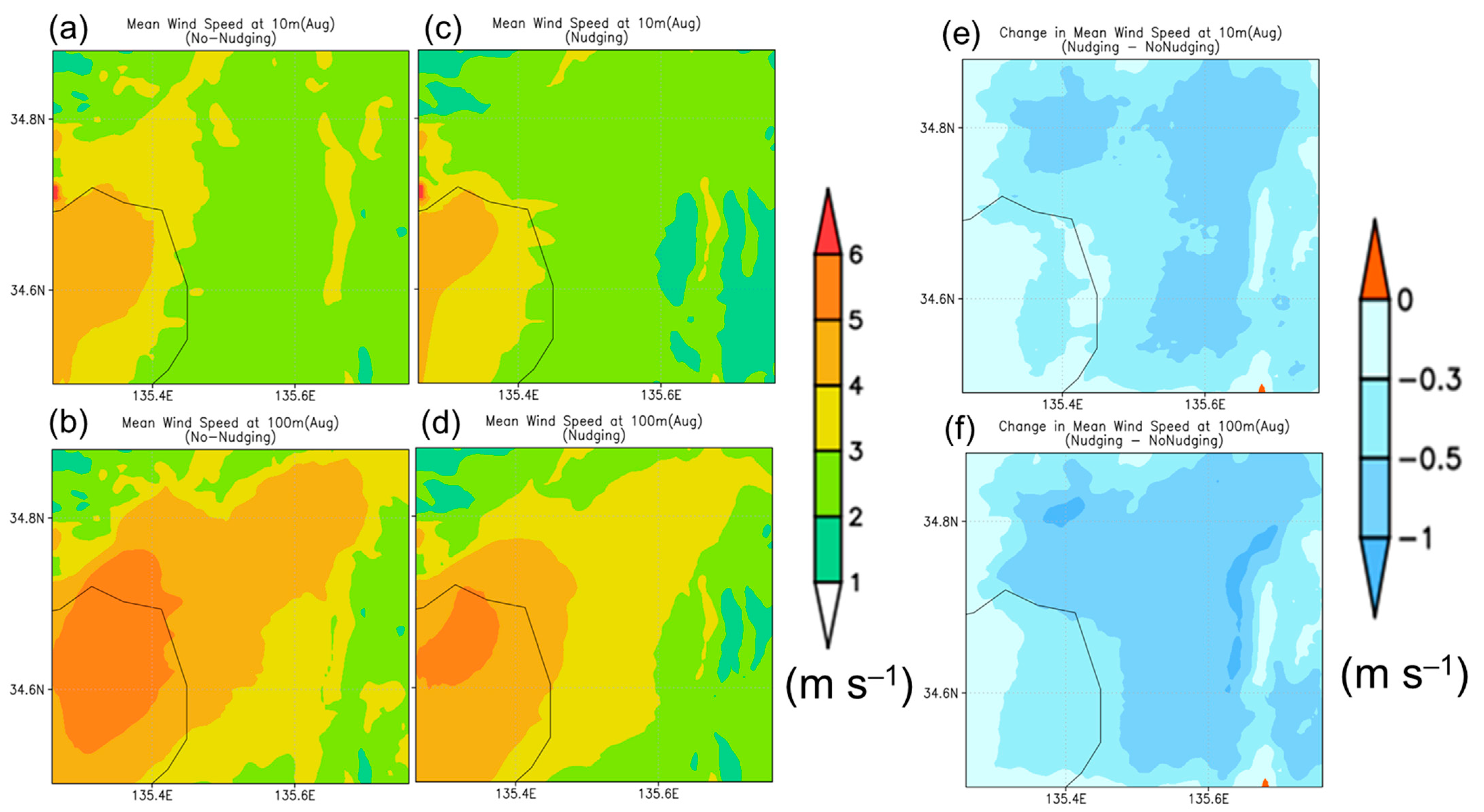
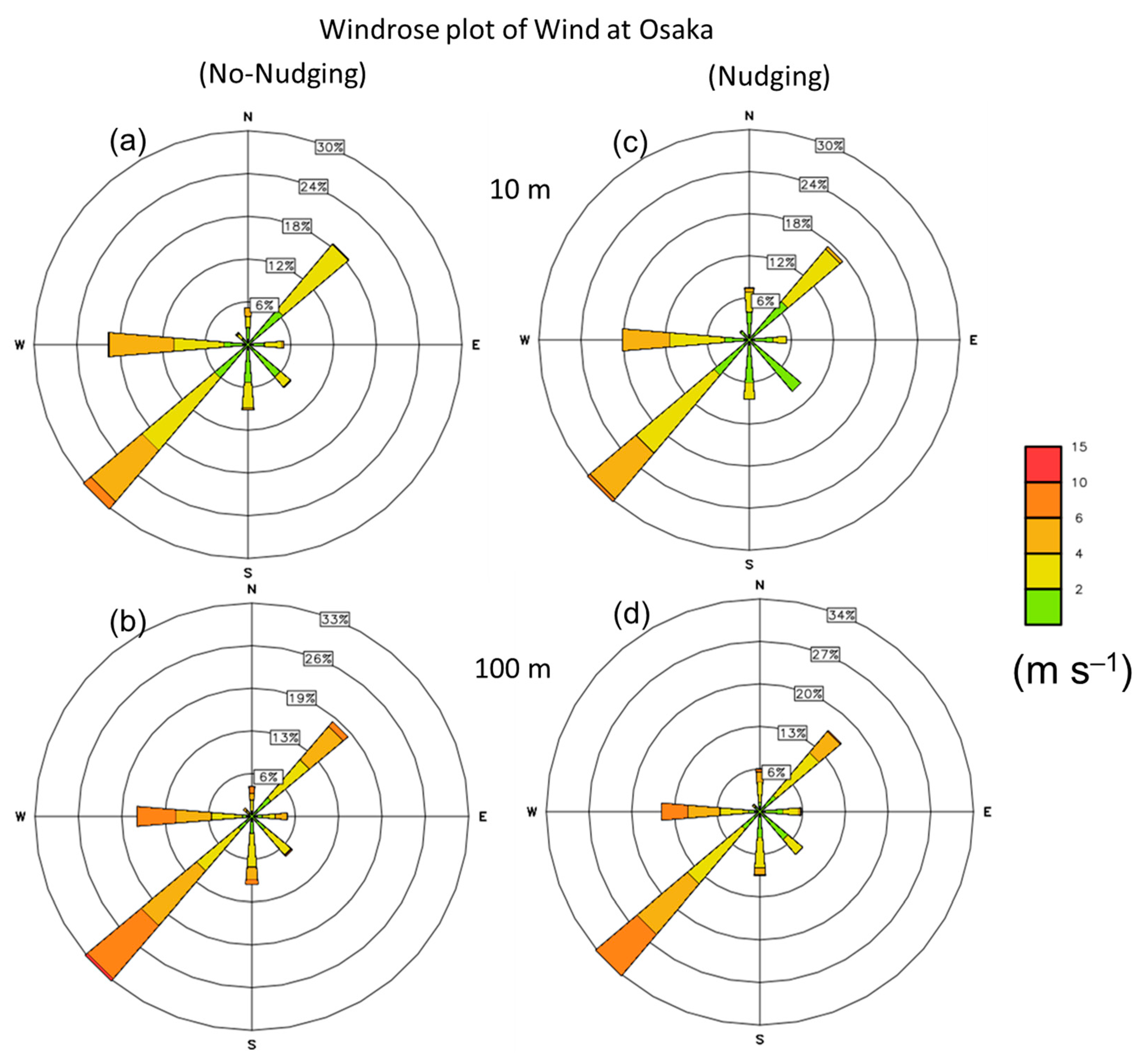
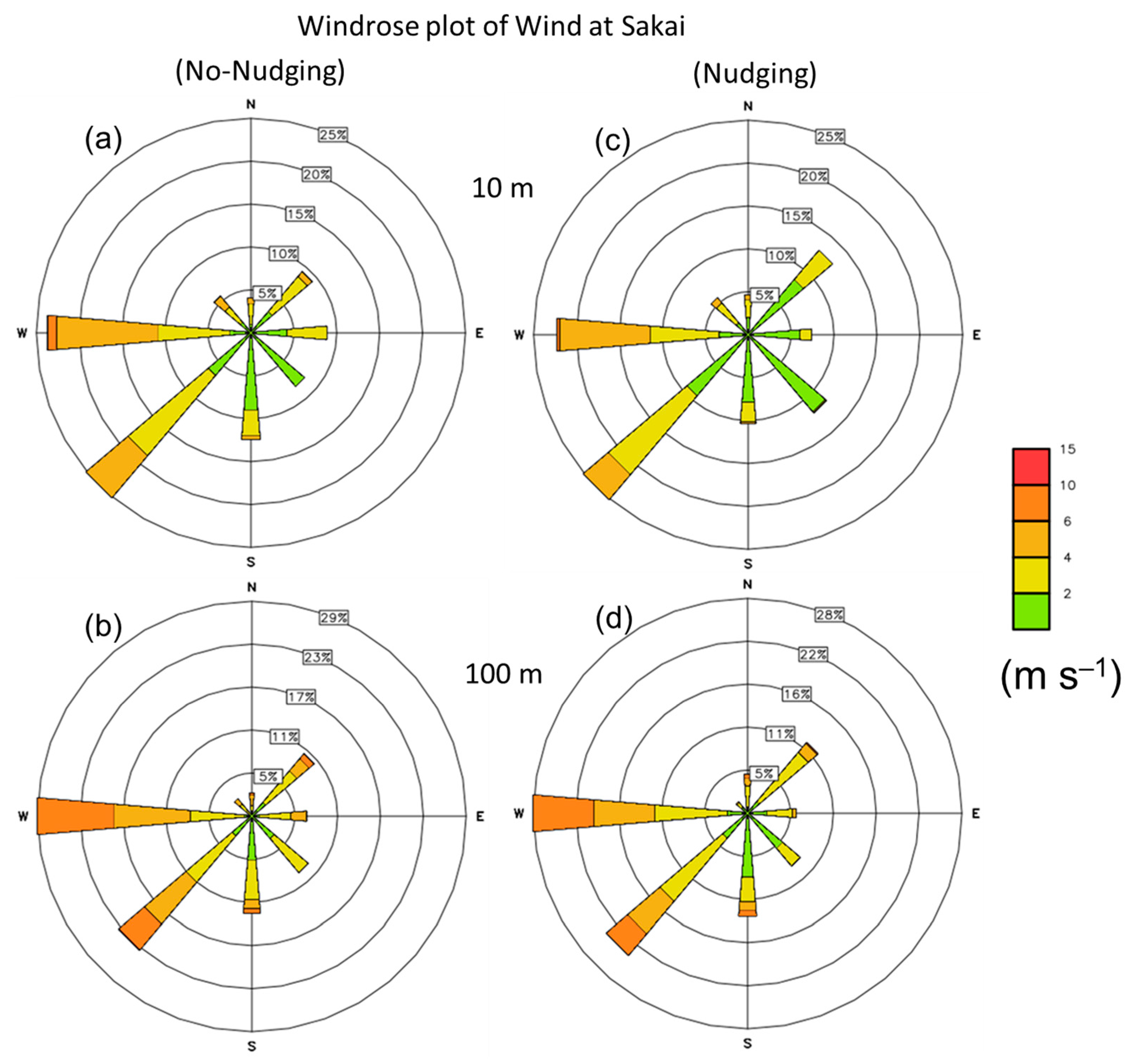
3.2.2. Wind
3.2.3. Vertical Profile of Wind
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Barker, D.M.; Wang, W.; Powers, J.G. A Description of the Advanced Research WRF Version 3; NCAR Technical note-475+ STR; National Center for Atmospheric Research: Boulder, CO, USA, 2008. [Google Scholar]
- Maity, S.; Nayak, S.; Nayak, H.P.; Bhatla, R. Comprehensive assessment of RegCM4 towards interannual variability of Indian Summer Monsoon using multi-year simulations. Theor. Appl. Climatol. 2022, 148, 491–516. [Google Scholar] [CrossRef]
- Morimoto, J.; Aiba, M.; Furukawa, F.; Mishima, Y.; Yoshimura, N.; Nayak, S.; Takemi, T.; Haga, C.; Matsui, T.; Nakamura, F. Risk assessment of forest disturbance by typhoons with heavy precipitation in northern Japan. For. Ecol. Manag. 2021, 479, 118521. [Google Scholar] [CrossRef]
- Nayak, S.; Takemi, T. Robust responses of typhoon hazards in northern Japan to global warming climate: Cases of landfalling typhoons in 2016. Meteorol. Appl. 2020, 27, e1954. [Google Scholar] [CrossRef]
- Zhang, Q.; Tong, P.; Liu, M.; Lin, H.; Yun, X.; Zhang, H.; Wang, X. A WRF-Chem model-based future vehicle emission control policy simulation and assessment for the Beijing-Tianjin-Hebei region, China. J. Environ. Manag. 2020, 253, 109751. [Google Scholar] [CrossRef]
- Nayak, S.; Takemi, T. Atmospheric driving mechanisms of extreme precipitation events in July of 2017 and 2018 in western Japan. Dyn. Atmos. Ocean. 2021, 93, 101186. [Google Scholar] [CrossRef]
- Singh, K.S.; Nayak, S.; Maity, S.; Nayak, H.P.; Dutta, S. Prediction of Extremely Severe Cyclonic Storm “Fani” Using Moving Nested Domain. Atmosphere 2023, 14, 637. [Google Scholar] [CrossRef]
- Nayak, S.; Takemi, T. Dynamical downscaling of Typhoon Lionrock (2016) for assessing the resulting hazards under global warming. J. Meteorol. Soc. Jpn. Ser. II 2019, 97, 69–88. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Yu, S.; Chen, X.; Zhang, Y.; Li, M.; Li, Z.; Song, Z.; Liu, W.; Li, P.; Xie, M.; et al. Evaluation of the WRF-CMAQ Model Performances on Air Quality in China with the Impacts of the Observation Nudging on Meteorology. Aerosol Air Qual. Res. 2022, 22, 220023. [Google Scholar] [CrossRef]
- Nayak, S.; Takemi, T. Quantitative estimations of hazards resulting from Typhoon Chanthu (2016) for assessing the impact in current and future climate. Hydrol. Res. Lett. 2019, 13, 20–27. [Google Scholar] [CrossRef] [Green Version]
- Nayak, S.; Dairaku, K.; Takayabu, I.; Suzuki-Parker, A.; Ishizaki, N.N. Extreme precipitation linked to temperature over Japan: Current evaluation and projected changes with multi-model ensemble downscaling. Clim. Dyn. 2018, 51, 4385–4401. [Google Scholar] [CrossRef] [Green Version]
- Nayak, S.; Dairaku, K. Future changes in extreme precipitation intensities associated with temperature under SRES A1B scenario. Hydrol. Res. Lett. 2016, 10, 139–144. [Google Scholar] [CrossRef] [Green Version]
- Maity, S.; Satyanarayana, A.N.V.; Mandal, M.; Nayak, S. Performance evaluation of land surface models and cumulus convection schemes in the simulation of Indian summer monsoon using a regional climate model. Atmos. Res. 2017, 197, 21–41. [Google Scholar] [CrossRef]
- Tuy, S.; Lee, H.S.; Chreng, K. Integrated assessment of offshore wind power potential using Weather Research and Forecast (WRF) downscaling with Sentinel-1 satellite imagery, optimal sites, annual energy production and equivalent CO2 reduction. Renew. Sustain. Energy Rev. 2022, 163, 112501. [Google Scholar] [CrossRef]
- Maity, S.; Mandal, M.; Nayak, S.; Bhatla, R. Performance of cumulus parameterization schemes in the simulation of Indian Summer Monsoon using RegCM4. Atmósfera 2017, 30, 287–309. [Google Scholar] [CrossRef] [Green Version]
- Nayak, S.; Mandal, M.; Maity, S. Customization of regional climate model (RegCM4) over Indian region. Theor. Appl. Climatol. 2017, 127, 153–168. [Google Scholar] [CrossRef]
- Chen, W.; Castruccio, S.; Genton, M.G.; Crippa, P. Current and future estimates of wind energy potential over Saudi Arabia. J. Geophys. Res. Atmos. 2018, 123, 6443–6459. [Google Scholar] [CrossRef] [Green Version]
- Nayak, S.; Mandal, M.; Maity, S. RegCM4 simulation with AVHRR land use data towards temperature and precipitation climatology over Indian region. Atmos. Res. 2018, 214, 163–173. [Google Scholar] [CrossRef]
- Li, H.; Claremar, B.; Wu, L.; Hallgren, C.; Körnich, H.; Ivanell, S.; Sahlée, E. A sensitivity study of the WRF model in offshore wind modeling over the Baltic Sea. Geosci. Front. 2021, 12, 101229. [Google Scholar] [CrossRef]
- Mohanty, U.C.; Osuri, K.K.; Routray, A.; Mohapatra, M.; Pattanayak, S. Simulation of Bay of Bengal tropical cyclones with WRF model: Impact of initial and boundary conditions. Mar. Geod. 2010, 33, 294–314. [Google Scholar] [CrossRef]
- Liu, L.; Ma, Y.; Menenti, M.; Zhang, X.; Ma, W. Evaluation of WRF modeling in relation to different land surface schemes and initial and boundary conditions: A snow event simulation over the Tibetan Plateau. J. Geophys. Res. Atmos. 2019, 124, 209–226. [Google Scholar] [CrossRef] [Green Version]
- Gholami, S.; Ghader, S.; Khaleghi-Zavareh, H.; Ghafarian, P. Sensitivity of WRF-simulated 10 m wind over the Persian Gulf to different boundary conditions and PBL parameterization schemes. Atmos. Res. 2021, 247, 105147. [Google Scholar] [CrossRef]
- Srinivas, C.V.; Yesubabu, V.; Venkatesan, R.; Ramakrishna, S.S. Impact of assimilation of conventional and satellite meteorological observations on the numerical simulation of a Bay of Bengal tropical cyclone of November 2008 near Tamilnadu using WRF model. Meteorol. Atmos. Phys. 2010, 110, 19–44. [Google Scholar] [CrossRef]
- Shimada, S.; Ohsawa, T. Accuracy and characteristics of offshore wind speeds simulated by WRF. Sola 2011, 7, 21–24. [Google Scholar] [CrossRef] [Green Version]
- Singh, K.S.; Bhaskaran, P.K. Impact of lateral boundary and initial conditions in the prediction of Bay of Bengal cyclones using WRF model and its 3D-VAR data assimilation system. J. Atmos. Sol.-Terr. Phys. 2018, 175, 64–75. [Google Scholar] [CrossRef]
- Osuri, K.K.; Mohanty, U.C.; Routray, A.; Mohapatra, M. The impact of satellite-derived wind data assimilation on track, intensity and structure of tropical cyclones over the North Indian Ocean. Int. J. Remote Sens. 2012, 33, 1627–1652. [Google Scholar] [CrossRef]
- Nadimpalli, R.; Srivastava, A.; Prasad, V.S.; Osuri, K.K.; Das, A.K.; Mohanty, U.C.; Niyogi, D. Impact of INSAT-3D/3DR radiance data assimilation in predicting tropical cyclone Titli over the Bay of Bengal. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6945–6957. [Google Scholar] [CrossRef]
- Bullock, O.R.; Alapaty, K.; Herwehe, J.A.; Mallard, M.S.; Otte, T.L.; Gilliam, R.C.; Nolte, C.G. An observation-based investigation of nudging in WRF for downscaling surface climate information to 12-km grid spacing. J. Appl. Meteorol. Climatol. 2014, 53, 20–33. [Google Scholar] [CrossRef]
- Mylonas, M.P.; Barbouchi, S.; Herrmann, H.; Nastos, P.T. Sensitivity analysis of observational nudging methodology to reduce error in wind resource assessment (WRA) in the North Sea. Renew. Energy 2018, 120, 446–456. [Google Scholar] [CrossRef]
- Ren, H.; Laima, S.; Chen, W.L.; Guo, A.; Li, H. Spatial correlation-based WRF observation-nudging approach in simulating regional wind field. Wind. Struct. 2019, 28, 129–140. [Google Scholar]
- Xiao, X.; Sun, J.; Ji, L.; Zhang, L.; Ying, Z.; Chen, Z.; Chen, M.; Xu, C. A Study on Local-Scale Thermal and Dynamical Mechanisms in the Initiation of a Squall Line Under Weak Forcing. J. Geophys. Res. Atmos. 2022, 127, e2021JD035561. [Google Scholar] [CrossRef]
- Yi, X.; Li, D.; Zhao, C.; Shen, L.; Zhou, X. Impact of a dense surface network on high-resolution dynamical downscaling via observation nudging. J. Appl. Meteorol. Climatol. 2020, 59, 1655–1670. [Google Scholar] [CrossRef]
- Tsujino, S.; Tsuboki, K. Intensity change of Typhoon Nancy (1961) during landfall in a moist environment over Japan: A numerical simulation with spectral nudging. J. Atmos. Sci. 2020, 77, 1429–1454. [Google Scholar] [CrossRef]
- Stauffer, D.R.; Seaman, N.L. Multiscale Four-Dimensional Data Assimilation. J. Appl. Meteor. 1994, 33, 416–434. [Google Scholar] [CrossRef]
- Deng, A.; Stauffer, D.; Gaudet, B.; Dudhia, J.; Wu, C.B.W.; Vandenberghe, F.; Liu, Y.; Bourgeoi, A. 2009: Update on WRF-ARW End-to-End Multi-Scale FDDA System. In Proceedings of the 10th WRF Users’ Workshop, NCAR, Boulder, CO, USA, 23–26 June 2009; Chapter 1.9. Available online: http://www2.mmm.ucar.edu/wrf/users/workshops/WS2009/WorkshopPapers.php (accessed on 12 April 2022).
- Ren, H.; Dudhia, J.; Ke, S.; Li, H. The basic wind characteristics of idealized hurricanes of different intensity levels. J. Wind Eng. Ind. Aerodyn. 2022, 225, 104980. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Y.; Cheng, W.Y.; Zhao, T.; Xu, M.; Liu, Y.; Shen, S.; Calhoun, K.M.; Fierro, A.O. Improving lightning and precipitation prediction of severe convection using lightning data assimilation with NCAR WRF-RTFDDA. J. Geophys. Res. Atmos. 2017, 122, 12–296. [Google Scholar] [CrossRef]
- Li, X.; Choi, Y.; Czader, B.; Roy, A.; Kim, H.; Lefer, B.; Pan, S. The impact of observation nudging on simulated meteorology and ozone concentrations during DISCOVER-AQ 2013 Texas campaign. Atmos. Chem. Phys. 2016, 16, 3127–3144. [Google Scholar] [CrossRef] [Green Version]
- Sommerfeld, M.; Dörenkämper, M.; Steinfeld, G.; Crawford, C. Improving mesoscale wind speed forecasts using lidar-based observation nudging for airborne wind energy systems. Wind Energy Sci. 2019, 4, 563–580. [Google Scholar] [CrossRef] [Green Version]
- Lorenz, T.; Barstad, I. A dynamical downscaling of ERA-Interim in the North Sea using WRF with a 3 km grid-for wind resource applications. Wind Energy 2016, 19, 1945–1959. [Google Scholar] [CrossRef]
- Janjić, Z.I. The step-mountain eta coordinate model: Further developments of the convection, viscous sublayer, and turbulence closure schemes. Mon. Weather Rev. 1994, 122, 927–945. [Google Scholar] [CrossRef]
- Rogers, E.; Black, T.; Ferrier, B.; Lin, Y.; Parrish, D.; DiMego, G. Changes to the NCEP Meso Eta Analysis and Forecast System: Increase in resolution, new cloud microphysics, modified precipitation assimilation, modified 3DVAR analysis. NWS Tech. Proced. Bull. 2001, 488, 15. [Google Scholar]
- Ferrier, B.S. J4. 2 Modifications of Two Convective Schemes Used In The Ncep Eta Model. In Proceedings of the 20th Conference on Weather Analysis and Forecasting/16th Conference on Numerical Weather Prediction, Seattle, WA, USA, 10–15 January 2004. [Google Scholar]
- Iacono, M.J.; Delamere, J.S.; Mlawer, E.J.; Shephard, M.W.; Clough, S.A.; Collins, W.D. Radiative forcing by long-lived greenhouse gases: Calculations with the AER radiative transfer models. J. Geophys. Res. Atmos. 2008, 113, D13103. [Google Scholar] [CrossRef]
- Dudhia, J. Numerical study of convection observed during the winter monsoon experiment using a mesoscale two-dimensional model. J. Atmos. Sci. 1989, 46, 3077–3107. [Google Scholar] [CrossRef]
- Chen, F.; Dudhia, J. Coupling an advanced land surface hydrology model with the Penn State NCAR MM5 modeling system. Part I: Model implementation and sensitivity. Mon. Weather Rev. 2001, 129, 569–585. [Google Scholar] [CrossRef]
- Ma, H.; Cao, X.; Ma, X.; Su, H.; Jing, Y.; Zhu, K. Improving the Wind Power Density Forecast in the Middle- and High-Latitude Regions of China by Selecting the Relatively Optimal Planetary Boundary Layer Schemes. Atmosphere 2022, 13, 2034. [Google Scholar] [CrossRef]
- Shikhovtsev, A.Y.; Kovadlo, P.G.; Lezhenin, A.A.; Korobov, O.A.; Kiselev, A.V.; Russkikh, I.V.; Kolobov, D.Y.; Shikhovtsev, M.Y. Influence of Atmospheric Flow Structure on Optical Turbulence Characteristics. Appl. Sci. 2023, 13, 1282. [Google Scholar] [CrossRef]
- NASA/METI/AIST/Japan Space Systems and U.S./Japan ASTER Science Team, 2019. ASTER Global Digital Elevation Model V003 [ASTGTMv003]. NASA EOSDIS Land Processes DAAC. Available online: https://lpdaac.usgs.gov/products/astgtmv003/ (accessed on 1 April 2022).
- Geospatial Information Authority of Japan, GSI Web Site. Available online: https://www.gsi.go.jp/ENGLISH/page_e30233.html (accessed on 1 April 2022).
- Pattantyus, A. Optimizing Strategies for an Observation-Nudging-Based Four-Dimensional Data Assimilation Forecast Approach with WRF-ARW. U.S. Army Research Laboratory. Summer Research Technical Report. 2011. Available online: https://apps.dtic.mil/sti/pdfs/ADA558426.pdf (accessed on 25 August 2022).
- Xue, Y.; Sellers, P.J.; Kinter, J.L.; Shukla, J. A simplified biosphere model for global climate studies. J. Clim. 1991, 4, 345–364. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Version | 3.9.1.1 |
| Integration time | Start: 00:00 UTC 03 Aug 2022 End: 00:00 UTC 31 Aug 2022 |
| Forcing Data | LFM surface and pressure data NCEP-FNL soil and ground data OSTIA SST |
| Domain size | 100 × 100 (500 m horizontal grid spacing) |
| Vertical layer | 40 |
| Model Physics | MYJ PBL scheme [41] Eta (Ferrier) microphysics scheme [42,43] RRTMG longwave radiation scheme [44] Dudhia shortwave sheme [45] Unified Noah land-surface model [46] |
| FDDA option | Observation nudging was enabled in one simulation Observation nudging was disabled in one simulation |
| Mean (°C) | |||||
| No Nudging | Nudging | Observation | Bias with No Nudging | Bias with Nudging | |
| Osaka | 30.27 | 30.19 | 29.39 | −0.88 | −0.80 |
| Hirakta | 30.03 | 30.01 | 28.50 | −1.53 | −1.50 |
| Sakai | 30.50 | 30.35 | 29.47 | −1.03 | −0.88 |
| Standard deviation (°C) | |||||
| No Nudging | Nudging | Observation | Bias with No Nudging | Bias with Nudging | |
| Osaka | 2.56 | 2.51 | 2.68 | 0.12 | 0.17 |
| Hirakta | 3.04 | 3.08 | 2.97 | −0.07 | −0.12 |
| Sakai | 2.53 | 2.66 | 2.65 | 0.11 | −0.01 |
| Mean (m s−1) | |||||
| No Nudging | Nudging | Observation | Bias with No Nudging | Bias with Nudging | |
| Osaka | 2.86 | 2.46 | 2.39 | −0.47 | −0.07 |
| Hirakta | 2.73 | 2.29 | 1.67 | −1.06 | −0.62 |
| Sakai | 2.82 | 2.26 | 2.12 | −0.70 | −0.14 |
| Standard deviation (m s−1) | |||||
| No Nudging | Nudging | Observation | Bias with No Nudging | Bias with Nudging | |
| Osaka | 1.50 | 1.44 | 1.10 | −0.40 | −0.33 |
| Hirakta | 1.47 | 1.43 | 0.94 | −0.53 | −0.49 |
| Sakai | 1.46 | 1.38 | 1.06 | −0.39 | −0.31 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nayak, S.; Kanda, I. Examining the Effectiveness of Doppler Lidar-Based Observation Nudging in WRF Simulation for Wind Field: A Case Study over Osaka, Japan. Atmosphere 2023, 14, 972. https://doi.org/10.3390/atmos14060972
Nayak S, Kanda I. Examining the Effectiveness of Doppler Lidar-Based Observation Nudging in WRF Simulation for Wind Field: A Case Study over Osaka, Japan. Atmosphere. 2023; 14(6):972. https://doi.org/10.3390/atmos14060972
Chicago/Turabian StyleNayak, Sridhara, and Isao Kanda. 2023. "Examining the Effectiveness of Doppler Lidar-Based Observation Nudging in WRF Simulation for Wind Field: A Case Study over Osaka, Japan" Atmosphere 14, no. 6: 972. https://doi.org/10.3390/atmos14060972
APA StyleNayak, S., & Kanda, I. (2023). Examining the Effectiveness of Doppler Lidar-Based Observation Nudging in WRF Simulation for Wind Field: A Case Study over Osaka, Japan. Atmosphere, 14(6), 972. https://doi.org/10.3390/atmos14060972