

Comparative Analysis of Neural Network Models for Predicting Ammonia Concentrations in a Mechanically Ventilated Sow Gestation Facility in Korea

Abstract
:1. Introduction
2. Materials and Methods
2.1. Pig Farm
2.2. Measurements
2.2.1. NH3 Concentration
2.2.2. Ventilation Rate
2.2.3. Temperature and RH
2.3. Models
2.3.1. Data Preprocessing
2.3.2. Trainless Baseline Models
2.3.3. Neural Network Models
2.3.4. Model Training and Evaluation
2.3.5. Performance Metrics
3. Results
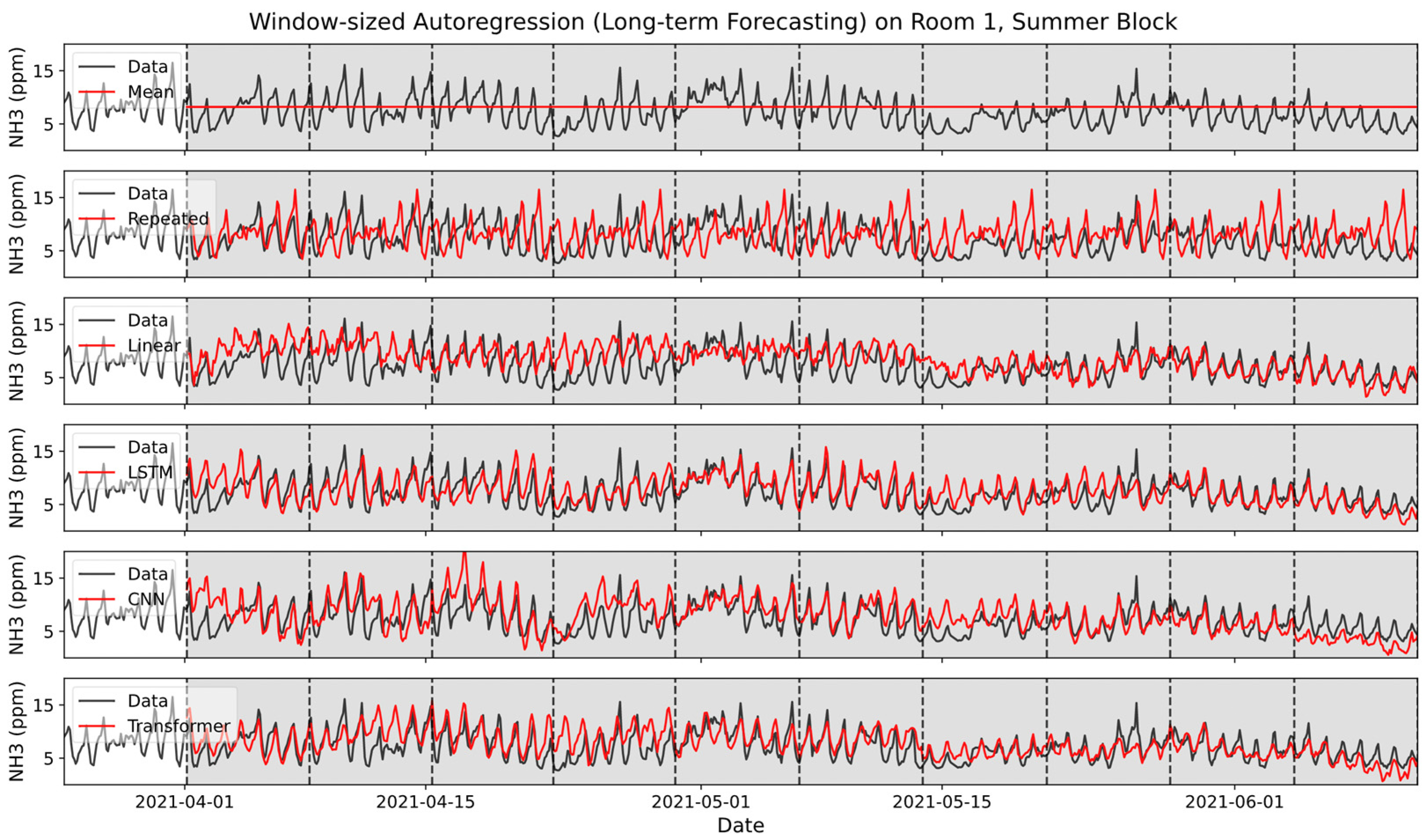
3.1. Sample Forecasting Plots
3.2. Performance Metrics
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Querol, X.; Alastuey, A.; Ruiz, C.R.; Artiñano, B.; Hansson, H.C.; Harrison, R.M.; Buringh, E.; Ten Brink, H.M.; Lutz, M.; Bruckmann, P.; et al. Speciation and Origin of PM10 and PM2.5 in Selected European Cities. Atmos. Environ. 2004, 38, 6547–6555. [Google Scholar] [CrossRef]
- Feng, Y.; Penner, J.E. Global Modeling of Nitrate and Ammonium: Interaction of Aerosols and Tropospheric Chemistry. J. Geophys. Res. Atmos. 2007, 112, 1–24. [Google Scholar] [CrossRef]
- Pinder, R.W.; Adams, P.J.; Pandis, S.N. Ammonia Emission Controls as a Cost-Effective Strategy for Reducing Atmospheric Particulate Matter in the Eastern United States. Environ. Sci. Technol. 2007, 41, 380–386. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tsimpidi, A.P.; Karydis, V.A.; Pandis, S.N. Response of Inorganic Fine Particulate Matter to Emission Changes of Sulfur Dioxide and Ammonia: The Eastern United States as a Case Study. J. Air Waste Manage. Assoc. 2007, 57, 1489–1498. [Google Scholar] [CrossRef]
- Yang, F.; Tan, J.; Zhao, Q.; Du, Z.; He, K.; Ma, Y.; Duan, F.; Chen, G.; Zhao, Q. Characteristics of PM2.5 Speciation in Representative Megacities and across China. Atmos. Chem. Phys. 2011, 11, 5207–5219. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Zhang, Q.Q.; He, K.; Zhang, Q.; Chai, L. Sulfate-Nitrate-Ammonium Aerosols over China: Response to 2000–2015 Emission Changes of Sulfur Dioxide, Nitrogen Oxides, and Ammonia. Atmos. Chem. Phys. 2013, 13, 2635–2652. [Google Scholar] [CrossRef] [Green Version]
- Adams, R.M.; Hamilton, S.A.; Mccarl, B.A. The Benefits of Pollution Control: The Case of Ozone and U.S. Agriculture. Am. J. Agric. Econ. 1986, 68, 886–893. [Google Scholar] [CrossRef]
- Tsai, Y.I.; Cheng, M.T. Visibility and Aerosol Chemical Compositions near the Coastal Area in Central Taiwan. Sci. Total Environ. 1999, 231, 37–51. [Google Scholar] [CrossRef]
- Yuan, C.S.; Lee, C.G.; Liu, S.H.; Chang, J.C.; Yuan, C.; Yang, H.Y. Correlation of Atmospheric Visibility with Chemical Composition of Kaohsiung Aerosols. Atmos. Res. 2006, 82, 663–679. [Google Scholar] [CrossRef]
- Wang, G.; Zhao, J.; Jiang, R.; Song, W. Rat Lung Response to Ozone and Fine Particulate Matter (PM2.5) Exposures. Environ. Toxicol. 2015, 30, 343–356. [Google Scholar] [CrossRef]
- Lacressonnière, G.; Foret, G.; Beekmann, M.; Siour, G.; Engardt, M.; Gauss, M.; Watson, L.; Andersson, C.; Colette, A.; Josse, B.; et al. Impacts of Regional Climate Change on Air Quality Projections and Associated Uncertainties. Clim. Chang. 2016, 136, 309–324. [Google Scholar] [CrossRef]
- Zhou, L.; Chen, X.; Tian, X. The Impact of Fine Particulate Matter (PM2.5) on China’s Agricultural Production from 2001 to 2010. J. Clean. Prod. 2018, 178, 133–141. [Google Scholar] [CrossRef]
- Zou, J.; Liu, Z.; Hu, B.; Huang, X.; Wen, T.; Ji, D.; Liu, J.; Yang, Y.; Yao, Q.; Wang, Y. Aerosol Chemical Compositions in the North China Plain and the Impact on the Visibility in Beijing and Tianjin. Atmos. Res. 2018, 201, 235–246. [Google Scholar] [CrossRef]
- Bhattarai, G.; Lee, J.B.; Kim, M.H.; Ham, S.; So, H.S.; Oh, S.; Sim, H.J.; Lee, J.C.; Song, M.; Kook, S.H. Maternal Exposure to Fine Particulate Matter during Pregnancy Induces Progressive Senescence of Hematopoietic Stem Cells under Preferential Impairment of the Bone Marrow Microenvironment and Aids Development of Myeloproliferative Disease. Leukemia 2020, 34, 1481–1484. [Google Scholar] [CrossRef] [Green Version]
- Dianwu, Z.; Anpu, W. Estimation of Anthropogenic Ammonia Emissions in Asia. Atmos. Environ. 1994, 28, 689–694. [Google Scholar] [CrossRef]
- Bouwman, A.F.; Lee, D.S.; Asman, W.A.H.; Dentener, F.J.; Van Der Hoek, K.W.; Olivier, J.G.J. A Global High-Resolution Emission Inventory for Ammonia. Glob. Biogeochem Cycles 1997, 11, 561–587. [Google Scholar] [CrossRef]
- Streets, D.G.; Bond, T.C.; Carmichael, G.R.; Fernandes, S.D.; Fu, Q.; He, D.; Klimont, Z.; Nelson, S.M.; Tsai, N.Y.; Wang, M.Q.; et al. An Inventory of Gaseous and Primary Aerosol Emissions in Asia in the Year 2000. J. Geophys. Res. Atmos. 2003, 108. [Google Scholar] [CrossRef]
- Huang, X.; Song, Y.; Li, M.; Li, J.; Huo, Q.; Cai, X.; Zhu, T.; Hu, M.; Zhang, H. A High-Resolution Ammonia Emission Inventory in China. Glob. Biogeochem Cycles 2012, 26, 1–14. [Google Scholar] [CrossRef]
- Kang, Y.; Liu, M.; Song, Y.; Huang, X.; Yao, H.; Cai, X.; Zhang, H.; Kang, L.; Liu, X.; Yan, X.; et al. High-Resolution Ammonia Emissions Inventories in China from 1980 to 2012. Atmos. Chem. Phys. 2016, 16, 2043–2058. [Google Scholar] [CrossRef] [Green Version]
- Misselbrook, T.H.; Gilhespy, S.L. Inventory of Ammonia Emissions from UK Agriculture 2017 DEFRA Contract SCF0107 Inventory Submission Report; Rothamsted Research: North Wyke, UK, 2019. [Google Scholar]
- Tang, Y.S.; Braban, C.F.; Dragosits, U.; Dore, A.J.; Simmons, I.; Van Dijk, N.; Poskitt, J.; Dos Santos Pereira, G.; Keenan, P.O.; Conolly, C.; et al. Drivers for Spatial, Temporal and Long-Term Trends in Atmospheric Ammonia and Ammonium in the UK. Atmos. Chem. Phys. 2018, 18, 705–733. [Google Scholar] [CrossRef] [Green Version]
- Maraveas, C. Durability Issues and Corrosion of Structural Materials and Systems in Farm Environment. Appl. Sci. 2020, 10, 990. [Google Scholar] [CrossRef] [Green Version]
- Jeerh, G.; Zhang, M.; Tao, S. Recent Progress in Ammonia Fuel Cells and Their Potential Applications. J. Mater. Chem. A Mater. 2021, 9, 727–752. [Google Scholar] [CrossRef]
- Verification of Environmental Technologies for Agricultural Production (VERA). Livestock Housing and Management Systems; International VERA Secretariat: Delft, The Nederland, 2018. [Google Scholar]
- Schrade, S.; Zeyer, K.; Gygax, L.; Emmenegger, L.; Hartung, E.; Keck, M. Ammonia Emissions and Emission Factors of Naturally Ventilated Dairy Housing with Solid Floors and an Outdoor Exercise Area in Switzerland. Atmos. Environ. 2012, 47, 183–194. [Google Scholar] [CrossRef]
- Philippe, F.X.; Laitat, M.; Wavreille, J.; Bartiaux-Thill, N.; Nicks, B.; Cabaraux, J.F. Ammonia and Greenhouse Gas Emission from Group-Housed Gestating Sows Depends on Floor Type. Agric. Ecosyst. Environ. 2011, 140, 498–505. [Google Scholar] [CrossRef]
- Philippe, F.X.; Canart, B.; Laitat, M.; Wavreille, J.; Bartiaux-Thill, N.; Nicks, B.; Cabaraux, J.F. Effects of Available Surface on Gaseous Emissions from Group-Housed Gestating Sows Kept on Deep Litter. Animal 2010, 4, 1716–1724. [Google Scholar] [CrossRef] [Green Version]
- Blunden, J.; Aneja, V.P.; Westerman, P.W. Measurement and Analysis of Ammonia and Hydrogen Sulfide Emissions from a Mechanically Ventilated Swine Confinement Building in North Carolina. Atmos. Environ. 2008, 42, 3315–3331. [Google Scholar] [CrossRef]
- Sun, G.; Guo, H.; Peterson, J.; Predicala, B.; Laguë, C. Diurnal Odor, Ammonia, Hydrogen Sulfide, and Carbon Dioxide Emission Profiles of Confined Swine Grower/Finisher Rooms. J. Air Waste Manag. Assoc. 2008, 58, 1434–1448. [Google Scholar] [CrossRef] [PubMed]
- Jo, G.; Ha, T.; Jang, Y.; Hwang, O.; Seo, S.; Woo, S.E.; Lee, S.; Kim, D.; Jung, M. Ammonia Emission Characteristics of a Mechanically Ventilated Swine Finishing Facility in Korea. Atmosphere 2020, 11, 1088. [Google Scholar] [CrossRef]
- Saha, C.K.; Ammon, C.; Berg, W.; Fiedler, M.; Loebsin, C.; Sanftleben, P.; Brunsch, R.; Amon, T. Seasonal and Diel Variations of Ammonia and Methane Emissions from a Naturally Ventilated Dairy Building and the Associated Factors Influencing Emissions. Sci. Total Environ. 2014, 468–469, 53–62. [Google Scholar] [CrossRef] [PubMed]
- Hempel, S.; Saha, C.K.; Fiedler, M.; Berg, W.; Hansen, C.; Amon, B.; Amon, T. Non-Linear Temperature Dependency of Ammonia and Methane Emissions from a Naturally Ventilated Dairy Barn. Biosyst. Eng. 2016, 145, 10–21. [Google Scholar] [CrossRef] [Green Version]
- Hempel, S.; Adolphs, J.; Landwehr, N.; Janke, D.; Amon, T. How the Selection of Training Data and Modeling Approach Affects the Estimation of Ammonia Emissions from a Naturally Ventilated Dairy Barn-Classical Statistics versus Machine Learning. Sustainability 2020, 12, 1030. [Google Scholar] [CrossRef] [Green Version]
- Feng, K.; Wang, Y.; Hu, R.; Xiang, R. Continuous Measurement of Ammonia at an Intensive Pig Farm in Wuhan, China. Atmosphere 2022, 13, 442. [Google Scholar] [CrossRef]
- Lara-Benítez, P.; Carranza-García, M.; Riquelme, J.C. An Experimental Review on Deep Learning Architectures for Time Series Forecasting. Int. J. Neural Syst. 2021, 31, 2130001. [Google Scholar] [CrossRef]
- Lim, B.; Zohren, S. Time-Series Forecasting with Deep Learning: A Survey. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2021, 379, 20200209. [Google Scholar] [CrossRef]
- Benidis, K.; Rangapuram, S.S.; Flunkert, V.; Wang, Y.; Maddix, D.; Turkmen, C.; Gasthaus, J.; Bohlke-Schneider, M.; Salinas, D.; Stella, L.; et al. Deep Learning for Time Series Forecasting: Tutorial and Literature Survey. ACM Comput. Surv. 2022, 55, 1–36. [Google Scholar] [CrossRef]
- Kim, S.J.; Lee, M.H. Design and Implementation of a Malfunction Detection System for Livestock Ventilation Devices in Smart Poultry Farms. Agriculture 2022, 12, 2150. [Google Scholar] [CrossRef]
- Kim, J.G.; Lee, S.Y.; Lee, I.B. The Development of an LSTM Model to Predict Time Series Missing Data of Air Temperature inside Fattening Pig Houses. Agriculture 2023, 13, 795. [Google Scholar] [CrossRef]
- Sheng, S.; Lin, K.; Zhou, Y.; Chen, H.; Luo, Y.; Guo, S.; Xu, C.Y. Exploring a Multi-Output Temporal Convolutional Network Driven Encoder-Decoder Framework for Ammonia Nitrogen Forecasting. J. Environ. Manag. 2023, 342, 118232. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Peng, S.; Zhu, J.; Liu, Z.; Hu, B.; Wang, M.; Pu, S. Prediction of Ammonia Concentration in a Pig House Based on Machine Learning Models and Environmental Parameters. Animals 2023, 13, 165. [Google Scholar] [CrossRef] [PubMed]
- Wang, K.; Liu, C.; Duan, Q. Piggery Ammonia Concentration Prediction Method Based on CNN-GRU. In Journal of Physics: Conference Series; IOP Publishing Ltd.: Bristol, UK, 2020; Volume 1624. [Google Scholar]
- Bengio, Y.; Courville, A.; Vincent, P. Representation Learning: A Review and New Perspectives. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1798–1828. [Google Scholar] [CrossRef] [Green Version]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural. Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical Evaluation of Gated Recurrent Neural Networks on Sequence Modeling. NIPS 2014 Workshop on Deep Learning; NeurIPS: Lake Tahoe, NV, USA, 2012. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Advances in Neural Information Processing Systems 25; NeurIPS: Montreal, CA, 2014. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention Is All You Need. Adv. Neural Inf. Process. Syst. 2017, 30, 6000–6010. [Google Scholar]
- Bai, S.; Kolter, J.Z.; Koltun, V. An Empirical Evaluation of Generic Convolutional and Recurrent Networks for Sequence Modeling. arXiv 2018, arXiv:1803.01271. [Google Scholar]
- Li, S.; Jin, X.; Xuan, Y.; Zhou, X.; Chen, W.; Wang, Y.-X.; Yan, X. Enhancing the Locality and Breaking the Memory Bottleneck of Transformer on Time Series Forecasting. Adv. Neural Inf. Process. Syst. 2019, 32, 5243–5253. [Google Scholar]
- Fan, C.; Zhang, Y.; Pan, Y.; Li, X.; Zhang, C.; Yuan, R.; Wu, D.; Wang, W.; Pei, J.; Huang, H. Multi-Horizon Time Series Forecasting with Temporal Attention Learning. In Proceedings of the ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Anchorage, AK, USA, 4–8 August 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 2527–2535. [Google Scholar]
- Park, S.; Jung, M.W.; Seo, S.; Woo, S.E.; Hwang, O.; Halder, J.N.; Jang, Y.; Jo, G.; Park, J. Comparison of Ammonia Emission Characteristics from Sows in Summer and Winter. J. Korean Soc. Atmos. Environ. 2022, 38, 895–905. [Google Scholar] [CrossRef]
- Fundamentals, I.-P. American Society of Heating, Refrigerating and Air-Conditioning Engineers (ASHRAE). ASHRAE Handbook; ASHRAE: Atlanta, GA, USA, 1993. [Google Scholar]
- Sonntag, D. Important New Values of the Physical Constants of 1986, Vapour Pressure Formulations Based on the ITS-90, and Psychrometer Formulae. Zeitschrift für Meteorologie 1990, 40, 340–344. [Google Scholar]
- Kiranyaz, S.; Avci, O.; Abdeljaber, O.; Ince, T.; Gabbouj, M.; Inman, D.J. 1D Convolutional Neural Networks and Applications: A Survey. Mech. Syst. Signal Process. 2021, 151, 107398. [Google Scholar] [CrossRef]
- Loshchilov, I.; Hutter, F. Decoupled Weight Decay Regularization. arXiv 2017, arXiv:1711.05101. [Google Scholar]
- Taylor, K.E. Summarizing Multiple Aspects of Model Performance in a Single Diagram. J. Geophys. Res. Atmos. 2001, 106, 7183–7192. [Google Scholar] [CrossRef]
- Peter, A. Rochford SkillMetrics: A Python Package for Calculating the Skill of Model Predictions against Observations 2016. Available online: http://github.com/PeterRochford/SkillMetrics (accessed on 17 July 2023).
- Battaglia, P.W.; Hamrick, J.B.; Bapst, V.; Sanchez-Gonzalez, A.; Zambaldi, V.; Malinowski, M.; Tacchetti, A.; Raposo, D.; Santoro, A.; Faulkner, R.; et al. Relational Inductive Biases, Deep Learning, and Graph Networks. arXiv 2018, arXiv:1806.01261. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nutritional Content | Crude Protein | Crude Fat | Calcium | Phosphorus | Crude Fiber | Crude Ash | Lysine |
|---|---|---|---|---|---|---|---|
| Percentage (%) | ≤13.50 | ≥3.00 | ≥0.65 | ≤1.50 | ≤8.00 | ≤8.00 | ≥0.60 |
| Collected Data from Pig House | |||||
|---|---|---|---|---|---|
| NH3 (ppm) | Ventilation Rate (m3/h) | Temp. (°C) | RH (%) | ||
| Room 1 | Avg. | 10.4 | 2387.4 | 22.6 | 65.7 |
| Min. | 2.6 | 910.6 | 17.0 | 21.9 | |
| Max. | 36.1 | 4806.3 | 32.0 | 100.0 | |
| Room 2 | Avg. | 11.7 | 2598.8 | 22.7 | 63.5 |
| Min. | 2.5 | 910.6 | 18.8 | 20.2 | |
| Max. | 40.4 | 4538.3 | 31.5 | 100.0 | |
| Room 3 | Avg. | 11.6 | 2809.0 | 23.4 | 65.4 |
| Min. | 2.6 | 910.6 | 18.6 | 22.6 | |
| Max. | 40.1 | 5214.6 | 33.3 | 100.0 | |
| Grand Average | 11.2 | 2598.4 | 22.9 | 64.8 | |
| iw = 1 w, ow = 1 w | iw = 1 w, ow = 2 w | iw = 1 w, ow = 3 w | iw = 1 w, ow = 4 w | |||||
|---|---|---|---|---|---|---|---|---|
| W-MAE | L-MAE | W-MAE | L-MAE | W-MAE | L-MAE | W-MAE | L-MAE | |
| Mean | 2.20 | 4.56 | 2.33 | 4.56 | 2.43 | 4.52 | 2.54 | 4.26 |
| Repeat | 2.47 | 4.90 | 2.71 | 4.90 | 2.85 | 4.82 | 2.98 | 4.58 |
| Linear | 2.15 | 2.59 | 2.24 | 2.55 | 2.20 | 2.34 | 2.15 | 2.42 |
| LSTM | 1.83 | 2.13 | 1.78 | 1.95 | 1.87 | 1.90 | 1.79 | 1.96 |
| CNN | 2.02 | 2.09 | 1.92 | 2.12 | 1.89 | 1.98 | 1.87 | 2.09 |
| Transformer | 1.89 | 1.87 | 1.90 | 2.07 | 1.87 | 1.97 | 1.73 | 1.83 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.; Jo, G.; Jung, M.; Oh, Y. Comparative Analysis of Neural Network Models for Predicting Ammonia Concentrations in a Mechanically Ventilated Sow Gestation Facility in Korea. Atmosphere 2023, 14, 1248. https://doi.org/10.3390/atmos14081248
Park J, Jo G, Jung M, Oh Y. Comparative Analysis of Neural Network Models for Predicting Ammonia Concentrations in a Mechanically Ventilated Sow Gestation Facility in Korea. Atmosphere. 2023; 14(8):1248. https://doi.org/10.3390/atmos14081248
Chicago/Turabian StylePark, Junsu, Gwanggon Jo, Minwoong Jung, and Youngmin Oh. 2023. "Comparative Analysis of Neural Network Models for Predicting Ammonia Concentrations in a Mechanically Ventilated Sow Gestation Facility in Korea" Atmosphere 14, no. 8: 1248. https://doi.org/10.3390/atmos14081248