3.2.1. Example Modeling Results
As an example of modeling results for the RBS systems, the performance of the case, RBS19, was first evaluated and compared with the modeling case, Rd19, that has no curb inlet.
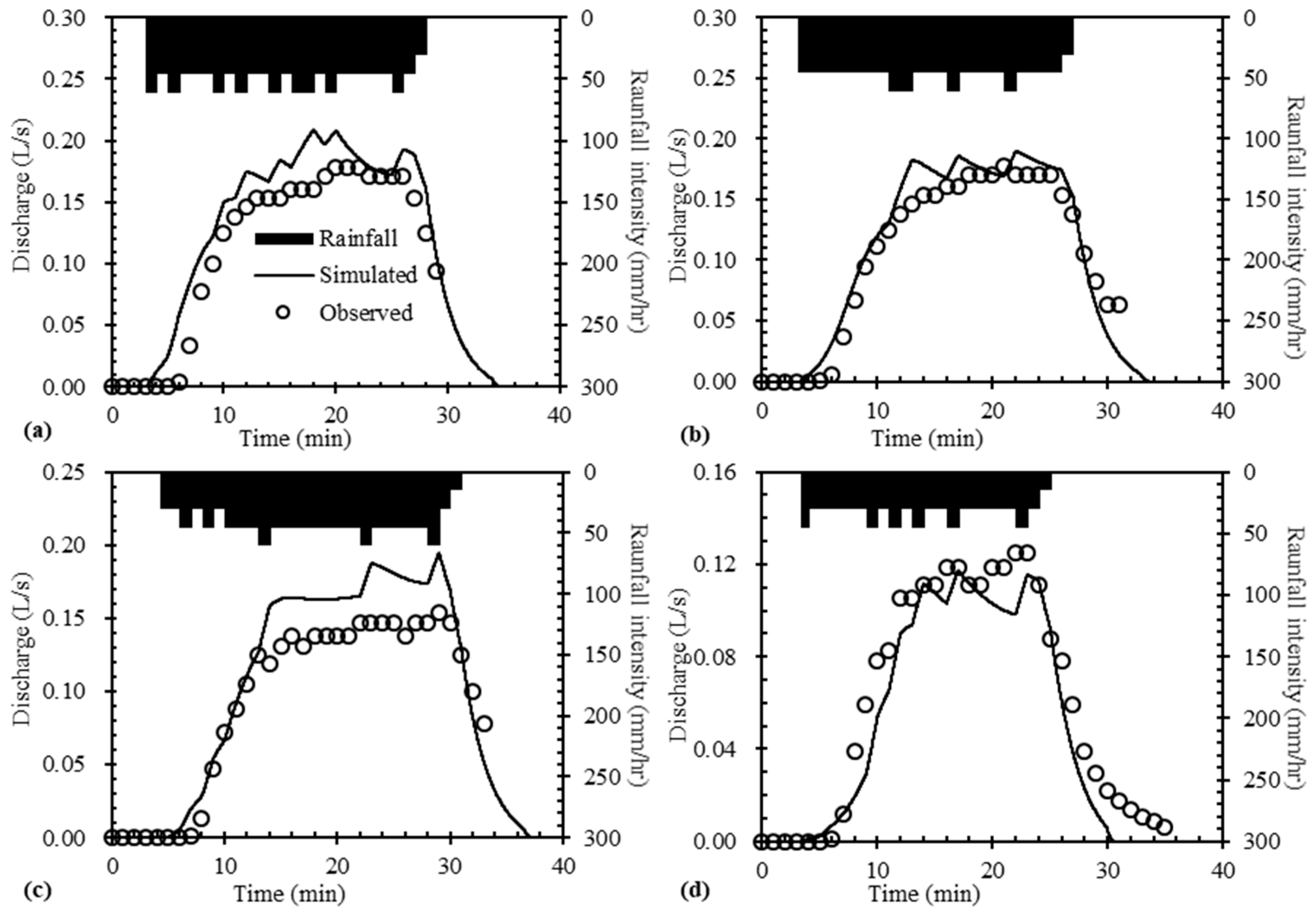
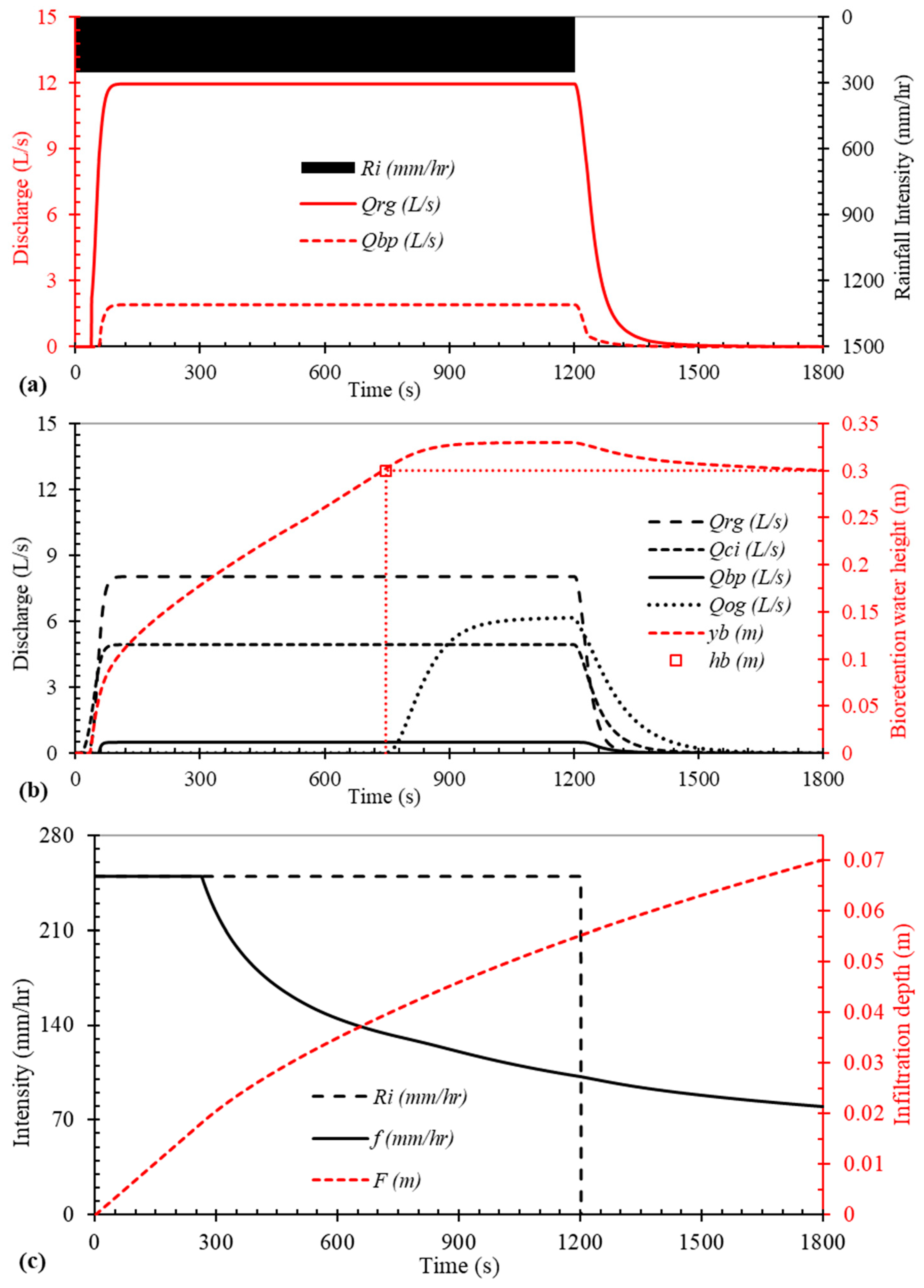
Figure 6 shows the simulated hydrographs for the Rd19 and RBS19 cases, the ponding depth in the RBS, infiltration rate, and cumulative infiltration depth for the RBS19 case (
Table 1). A summary of the results for all modeling cases for the road-only and the RBS is given in
Table 4 and
Table 5, respectively.
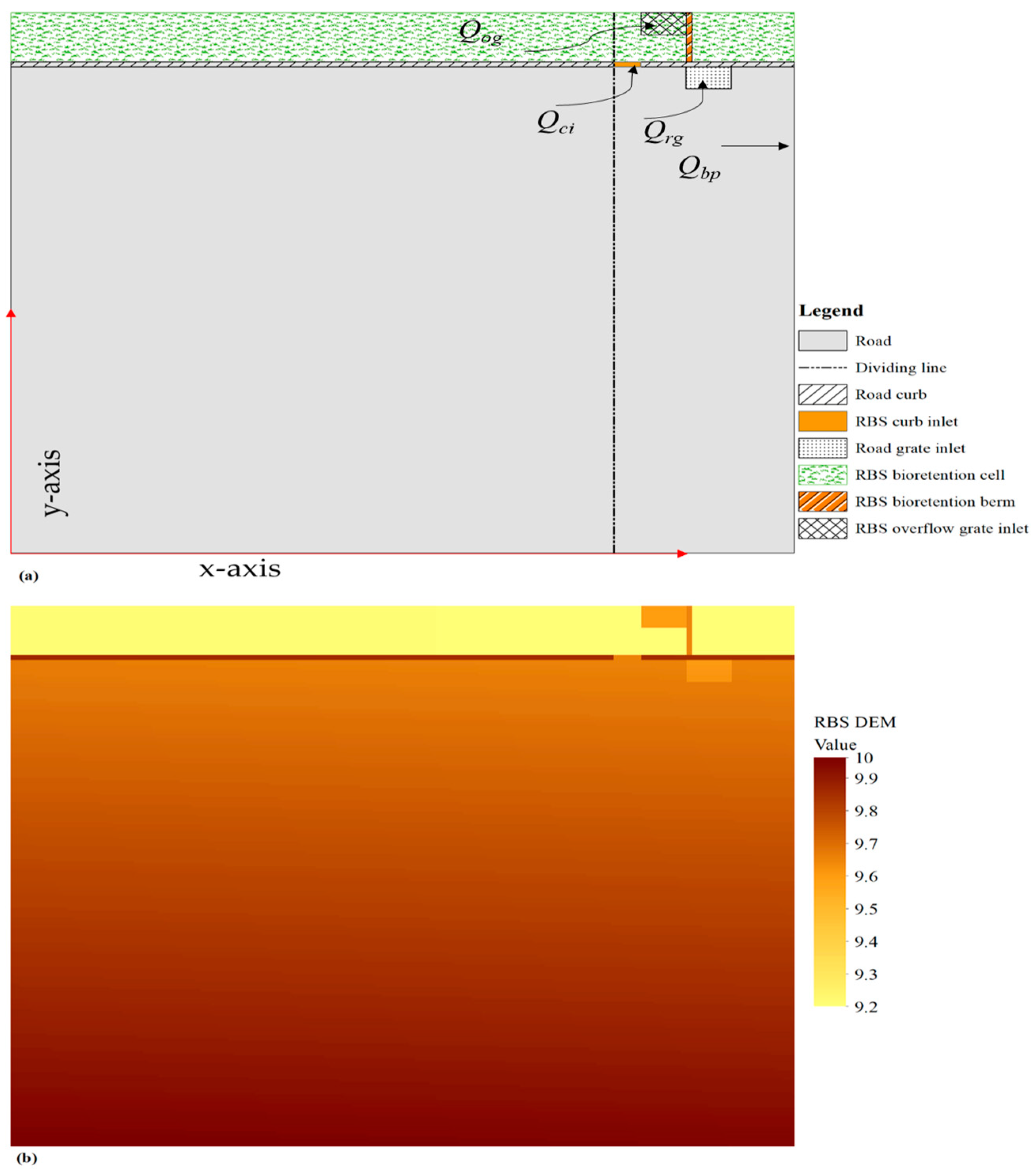
Figure 6a shows the rainfall intensity over 20 min, hydrographs of the bypass flow (
Qbp), and the flow into the road grate inlet (
Qrg) of the 30 min simulation period. The runoff generated from the road surface took 32 s to reach the grate inlet, the discharge into the grate inlet then increased rapidly to a 98% peak in 85 s, and reached the equilibrium discharge of 11.96 L/s at 180 s under the constant rainfall. The grate inlet discharge took about 300 s to decrease to 0 L/s after the rainfall stopped. The rest part of the overland runoff that was not captured by the grate inlet discharges to the downstream as the bypass flow, which had a peak discharge of 1.91 L/s at 91 s. The sum of the peak flows of
Qrg and
Qbp was 13.87 L/s, which was the same as the peak discharge from the rational formula.
In comparison,
Figure 6b shows simulated hydrographs for
Qrg,
Qbp, the curb inlet intercepted flow (
Qci), and the overflow from the grate inlet in bioretention (
Qog) as well as the bioretention water depth (
yb) of the modeling case, RBS19. The peak or equilibrium discharges of
Qrg,
Qci, and
Qbp were 8.03 L/s, 4.94 L/s, and 0.50 L/s, respectively. The flow interception by the curb inlet seemed to slow down the flow a little bit to make more runoff into the grate inlet. Therefore, the sum of the peak
Qrg and
Qci for RBS 19 was 12.97 L/s, which was larger than the
Qrg of 11.96 L/s for the Rd19 case.
Under a rainfall event, the interception efficiency,
Eci, of a curb inlet is not constant, but changes with time. For RBS19, the runoff first reached the curb inlet at 11 s, and
Eci was 100% when the runoff rate was small at 11 s < t < 31 s, then
Eci decreased with time and became 36.7% when
Qci reached the equilibrium discharge. At the end of the 40-min simulation, the runoff volume, intercepted by the curb inlet and generated from the road, can be computed and the volumetric interception efficiency was computed as 37.4% for the RBS19 case, which will be further discussed later using
Table 5. Therefore, for RBS19, the grate inlet on the road still intercepted a large percent (~60%) of the incoming runoff and only about 2.6% of the runoff volume was bypassed downstream. This is important information to the road and bioretention design since many designers think the curb inlet can intercept all runoff and adding or keeping the grate inlet on the road is not necessary.
Figure 6 also shows that the geometry of the experiment and the model allowed for a fully developed flow by the time the flow reached the inlet. This was true for all modeling cases.
Under 250 mm/h rainfall over 20 min, the bioretention overflow
Qog started at 748 s, reached the peak discharge of 6.16 L/s (at 1200s), and decreased after the rainfall stopped (
Figure 6b). The red dash line in
Figure 6b shows that the ponding depth (
yb) adjacent to the bioretention overflow grate inlet increased to become higher than the bioretention overflow height (
hb = 0.3 m) at 748 s and decreased to 0.3 m slowly after the rainfall stopped. There was a time period when
Qog was larger than
Qci, which seemed impossible in the first impression. This was because the grate inlet discharge capacity was usually higher than the curb inlet capacity. In this study, the corresponding overflow weir length of the grate inlet [2 × (0.45 + 0.75) m] was much larger than the curb inlet opening (0.6 m) and the hydraulic head above the grate inlet could be larger also. It was verified that the mass conservation of the runoff in the simulation domain was valid (
Figure 6) and the simulated larger
Qog was correct.
Figure 6c shows the bioretention infiltration rate (
f) and cumulative infiltration (
F) over time. The infiltration rate was calculated using the Green-Ampt method in FullSWOF-ZG, which considers the soil infiltration parameters, runoff ponding depth, and rainfall intensity (
Ri) at every time step. The bioretention infiltration rate was equal to the rainfall intensity,
Ri, when the calculated soil infiltration capacity was larger than
Ri. The infiltration rate started to decrease at 263 s and decreased to 80.1 mm/h at the end of the simulation. The cumulative infiltration,
F, kept increasing during the simulation period and reached 0.07 m at 30 min, which seemed small, but the infiltration continued at ~80 mm/h to gradually deplete all ponding water in the bioretention cell. The heavy rainfall (250 mm/h) over 20 min was used for the simulation in order to generate the overflow in the grate inlet at the RBS so that FullSWOF-ZG was fully tested.
3.2.2. Modeling Results for Road-Only (Rd) Cases
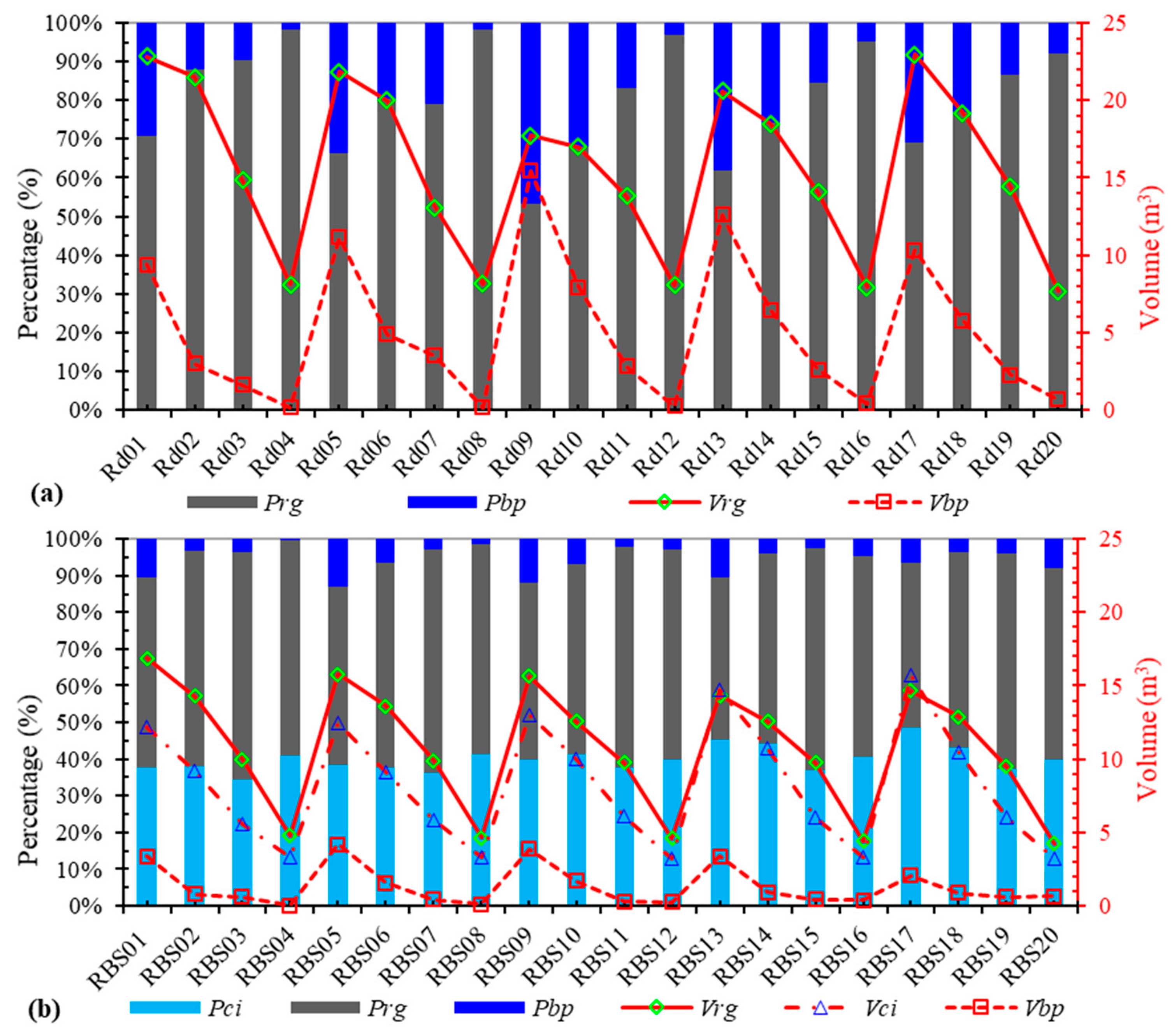
Modeling results for 20 road-only cases are first presented in
Figure 7a and summarized in
Table 4 to compare them with modeling results for the road-bioretention cases (
Figure 7b,
Table 5 and
Table 6) in the next section. For the road-only cases, the rainfall volume,
Vrd, was transformed into the runoff volume captured by the road grate inlet (
Vrg) and the bypass runoff volume (
Vbp). The percent differences (∆
Vrd) between the simulated runoff volume,
Vsrd =
Vrg + Vbp, and the rainfall volume
Vrd for 20 road-only cases ranged from −3.3% to 0.1%. The average ± standard deviation of ∆
Vrd was −0.6 ± 0.8% for 20 road-only cases (
Table 4), which indicated FullSWOF-ZG had a higher accuracy in mass balance. These 20 modeling cases were regrouped into five groups (by alternating two colors in
Table 4): The road length
L decreased from 40 m to 10 m as the modeling case number increased when
S0 is the same in each group (
Table 1). Since the same rainfall was used for all modeling cases, all runoff volumes decreased with the decrease of the road length (
Table 4), e.g.,
Vrg decreased from 22.96 m
3 (Rd17,
L = 40 m) to 7.67 m
3 (Rd20,
L = 10 m); and the corresponding
Vbp decreased from 10.31 m
3 to 0.64 m
3. Because of the volume decrease or less flow velocity due to less
L, the percent of
Vrg (
Prg =
Vrg/
Vsrd) increased with the additional influence of the increase of the cross slope, e.g., Rd01–Rd04 from 70.9% to 98.3% (
Figure 7a). The percent of
Vrg ranged from 53.4% (Rd09,
Sx = 2%) to 98.3% (Rd08,
Sx = 4%), with an average ± standard deviation of 80.7 ± 21.5%. The percent of
Vbp (
Pbp =
Vbp/
Vsrd) ranged from 1.7% (Rd08) to 46.6% (Rd09), with an average ± standard deviation of 19.3 ± 13.0%. The relatively large variations of
Prg and
Pbp were due to the change of the road length or upstream inflow.
If sorting the modeling cases by the road length,
L (
Table 4), the average
Prg for the same
L cases decreased from 96.2% to 64.3% for
L increases from 10 to 40 m, but the standard deviation from the mean increased from 2.5% to 7.0%. Therefore,
L had more influence on
Prg than
S0 did. When
L was smaller, the incoming runoff from the upstream road was small, more runoff as intercepted by the grate inlet, and less runoff was bypassed downstream. Only 20 individual road-only cases (4
L × 5
S0) were modeled here; when
S0 was increased, the cross slope,
Sx, was also increased to allow and guide more runoff to the grate inlet.
Sx ranged from 3.0%–6.5% at
L = 10 m to 1.0%–4.0% at
L = 40 m (
Table 1). For Rd09, both
Vbp and
Pbp were the highest and indicated a high potential of the local flooding on the road. For all road-only cases, the peak discharges of the grate inlet (
Qprg) were 6.68 ± 0.17 L/s for the
L = 10 m group, 11.66 ± 0.61 L/s for the
L = 20 m group, 15.92 ± 1.51 L/s for the
L = 30 m group, and 17.43 ± 1.91 L/s for the
L = 40 m group. The peak discharges of the bypass flow (
Qpbp) were 0.26 ± 0.17 L/s for the
L = 10 m group, 2.22 ± 0.61 L/s for the
L = 20 m group, 4.90 ± 1.51 L/s for the
L = 30 m group, and 10.33 ± 1.91 L/s for the
L = 40 m group. Both
Qprg and
Qpbp increased with the increase of the catchment length.
3.2.3. Modeling Results for Road-Bioretention Strip (RBS) Cases
1. Mass Balance on the Road with a Curb Inlet
First, we studied the mass (i.e., runoff volume) balance or redistribution on the road with a curb inlet for the RBS, which was compared with the road-only cases. Results are summarized in columns 2 to 7 in
Table 5 and plotted on
Figure 7b. For the corresponding 20 bioretention modeling cases (
Figure 7b), a part of the road runoff (
Vsrd) was intercepted by the curb inlet (
Vci), resulting in a reduction of the runoff incepted by the road grate inlet (
Vrg) and bypass runoff (
Vbp). For the 20 RBS cases (
Table 5),
Vci increased from 3.27 ± 0.05 m
3 (
L = 10 m) to 13.6 ± 1.54 m
3 (
L = 40 m) (
Table 6), but the percentage (
Pci =
Vci/
Vsrd =
Vci/(
Vci +
Vrg +
Vbp)) of runoff volume intercepted by the curb inlet (or curb inlet efficiency by volume) was similar: 40.0 ± 3.3%. This was because the curb inlet length,
Lci, was also increased from 0.45 m to 1.2 m for
L = 10–40 m. The corresponding runoff volume (
Vrg) captured by the road grate inlet increased from 4.53 ± 0.21 m
3 (
L = 10 m) to 15.46 ± 1.00 m
3 (
L = 40 m); the bypass runoff volume (
Vbp) from 0.28 ± 0.25 m
3 to 3.38 ± 0.81 m
3. The percentage of the runoff captured by the grate inlet on the road (
Prg =
Vrg/
Vsrd) decreased from 56.1 ± 2.6% (
L = 10 m) to 47.6 ± 3.1% (
L = 40 m), with an overall average ± standard deviation of 54.6 ± 5.2%. Due to the curb inlet interception, each RBS system diverted a part of the runoff from the impervious road to the bioretention strip for infiltration and treatment (e.g., to allow sediments to settle and improve water quality), therefore, less runoff flowed into the grate inlet on the road, and then the
Prg for the RBS (
Table 5) was always smaller than for the corresponding road-only case (
Table 4). The differences of
Prg between the road-only and corresponding RBS modeling cases ranged from 5.2%–40.8%, with an average difference of 26.0 ± 9.6%.
For all RBS cases under 250 mm/h rainfall, the road surface runoff was not be 100% intercepted by the curb inlet, which indicated that the curb inlet was the bottleneck of the RBS system and impeded the runoff flowing into the bioretention strip for detention and infiltration to improve the stormwater quality. Therefore, the grate inlet was necessary to capture the road surface runoff and discharge into an underground drainage pipe to relieve road local flood inundation and ensure traffic safety. The bypass runoff percentage,
Pbp, for the RBS cases (
Figure 7 and
Table 5) ranged from 0.3% (RBS04) to 12.9% (RBS05), with an average ± standard deviation of 5.4 ± 3.6%. The
Vbp and
Pbp for all RBS cases (
Table 5) were lower than them for the corresponding road-only cases (
Table 4), which means the curb inlet and grate inlet combination was more efficient than the grate inlet only for intercepting the road surface runoff. The mass balance as percent differences of the whole simulation domain (∆
V), on the road (∆
Vrd) and in the bioretention strip (∆
Vrb), were small (
Table 5).
2. Mass Balance in the Bioretention Strip
The mass (i.e., runoff volume) balance or redistribution in the bioretention strip are summarized in columns 8 to 11 in
Table 5. For RBS systems, the inflow to the bioretention strip included the runoff intercepted by the curb inlet (
Vci) and generated on the bioretention surface from rainfall (
Vrb). The bioretention outflow included the infiltration (
Vinf) and the overflow through the grate inlet near the check dam (
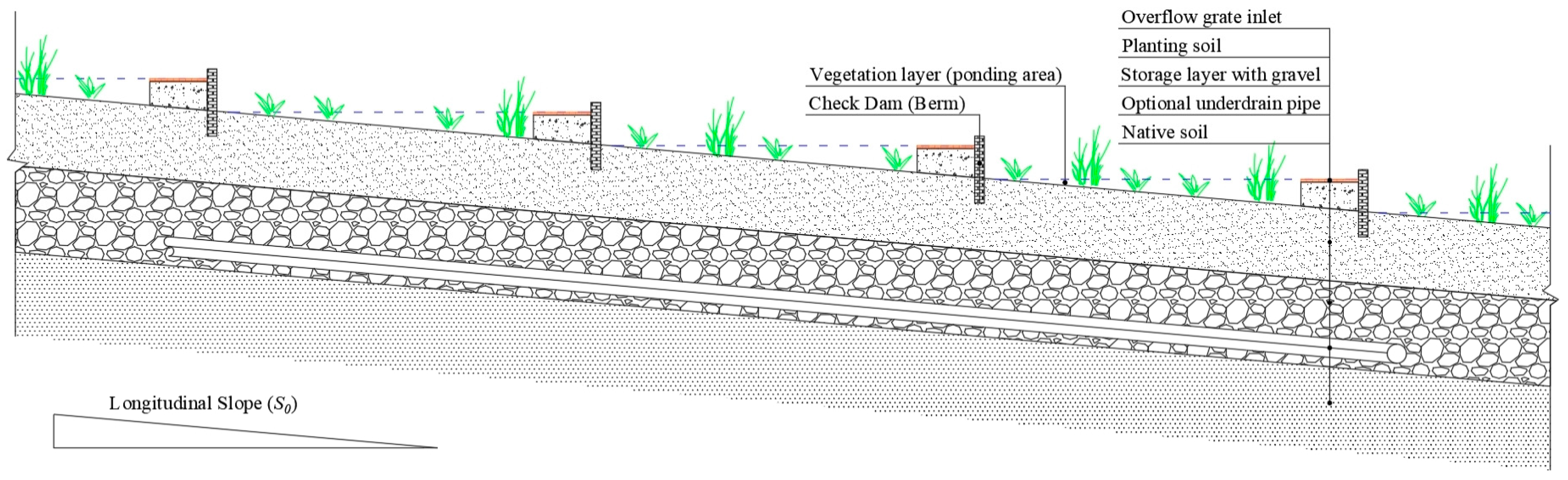
Figure 1,
Vbog in
Table 5). The difference between the inflow and the outflow was the ponding volume (
Vbio) in the bioretention strip.
Vrb was the rainfall depth (250 mm/h × 20 min) times the area (
L × 1 m) of the bioretention strip and linearly increased from 0.83 m
3 to 3.33 m
3 for
L = 10 m to 40 m.
The cumulative infiltration volume of bioretention (
Vinf) was calculated (
Table 5) and the mean
Vinf ranged from 1.24 m
3 for the
L = 10 m group to 3.75 m
3 for the
L = 40 m group over 40 min simulation periods. To understand the soil infiltration performance of the bioretention, loamy sand was used for the
L of 10 m and 40 m cases, sandy loam for
L of 20 m cases, and loam for
L of 30 m cases. The average and standard deviation of the infiltrated runoff percentage, i.e.,
Vinf/(
Vci +
Vrb), were 30.4 ± 0.3% for loamy sand (
L = 10 m group), 21.3 ± 0.8% for sandy loam (
L = 20 m group), 20.7 ± 6.5% for loam (
L = 30 m group), and 22.5 ± 8.5% for loamy sand (
L = 40 m group).
The infiltration in the bioretention cell is influenced by the runoff inflow, the soil infiltration capacity, and the ponding depth as FullSWOF_2D considers the water depth when applying the Green-Ampt method [
32]. Under small rainfall intensity and higher infiltration rate, it was possible for all runoff to infiltrate downward and the bioretention cell did not have any ponding. The infiltrated runoff volume,
Vinf, decreased from RBS01 (4.28 m
3) to RBS17 (3.09 m
3,
Table 5,
L = 40 m group), mainly because the smaller longitudinal slope,
S0, increased the ponding area, since
hb and the infiltration parameters were the same for these five modeling cases. For RBS01, RBS05, and RBS09,
L ×
S0 ≤
hb, so that the maximum ponding area was 40 m × 1 m (width of the bioretention strip); for RBS13 and RBS17,
L ×
S0 >
hb, so that the maximum ponding area was less than 40 m × 1 m (only covered 28.6 m and 20 m, respectively).
There was no overflow through the grate inlet in the bioretention strip for the modeling cases of
L = 10 m (
Vbog = 0) because the overflow height of the grate inlet (
hb) was the largest (0.4 m,
Db—0.05 in
Table 1), but the maximum ponding depth (
hmax,
Table 7) was less than
hb for these cases. All other three modeling groups (
L = 20, 30, and 40 m) overflowed through the grate inlet in the bioretention (
hmax >
hb,
Table 7). The increase of the overflow grate-inlet volume
Vbog (
Table 5) was mainly because of the increase of the longitudinal slope (
S0) when
L and
hb were unchanged. The mean
Vbog increased from 1.59 m
3 (
L = 20 m group) to 10.11 m
3 (
L = 40 m group) when
hb decreased from 0.3 to 0.2 m. This indicated that the overflow height,
hb, was a key design parameter of the RBS to retain the runoff inside the bioretention.
The mean Vbog percentage, i.e., Vbog/(Vci + Vrb), increased when hb decreased: 20.7 ± 12.7% for the L = 20 m group (hb = 0.30 m), 44.4 ± 8.8% for the L = 30 m group (hb = 0.25 m), and 58.4 ± 10.2% for the L = 40 m group (hb = 0.20 m). When hb was small, the grate-inlet overflow became the main mechanism to remove the extra runoff in the bioretention strip as indicated by the larger Vbog percentage.
The mean overflow peak discharge,
Qpog, increased from 4.81 L/s to 12.65 L/s for
L = 20–40 m groups (
Table 7) when the total inflow (
Vci +
Vrb) increased,
hb decreased also. The bioretention overflow-start-time, (
Tbog) and
Qpog, were mainly related to
Vci and
hb.
Tbog decreased from 974.8 ± 188.2 s (
L = 20 m group) to 391.6 ± 252.5 s (
L = 40 m group). The bioretention overflow was delayed when the overflow height,
hb, increased. The bioretention overflow was first projected to start at 163 s in the RBS17 modeling case and reached the peak discharge of 14.92 L/s. The main reason was the largest curb inlet intercepted runoff volume of RBS17 (15.72 m
3) due to the large
L and
Sx and the lowest
hb = 0.20 m.
For all 20 RBS cases (
Table 5), the mean ponding volume in the bioretention (
Vbio) were 3.10 m
3 for the
L = 10 m group, 4.86 m
3 for the
L = 20 m group, 4.93 m
3 for the
L = 30 m group, and 3.93 m
3 for the
L = 40 m group when the rainfall intensity was large (250 mm/h).
Vbio is a function of time and shows the integrated/cumulative effects of different flow processes (inflow from curb inlet, outflow through the overflow grate inlet, rainfall, and infiltration).
Vbio(
t) is also related to the bioretention strip’s ponding capacity, which was determined by the bioretention-strip geometry as shown in Equation (9). There are four modeling cases (RBS09, 13, 17, and 18;
Table 1) with
L ×
S0 ≥
hb; therefore, the overflow height,
hb, was the only controlling factor for
Vbio(
t), independent of
L ×
S0 for these four cases.
From the beginning of the simulation, when the ponding depth was zero (more infiltration and zero runoff),
Vbio(
t) was zero. When the ponding depth increased from zero to
hb,
Vbio(
t)
/Vpc increased from zero to 1.0, since
Vpc (Equation (9) is the calculated maximum bioretention ponding volume at
hb. When the overflow through the grate inlet took place in the bioretention strip,
Vbio(
t)
/Vpc was greater than 1.0. After the rainfall stopped, eventually,
Vbio(
t) was zero when the ponding depth decreased to zero. In this study,
Vbio(
t) at the end of the simulation (
t = 40 min) for each RBS case is shown in
Table 5 and was used to calculate the runoff-volume mass-balance percent difference (∆
V) in the whole simulation domain. These percent differences (
Table 5) were very small, with an average of −0.02%, and indicated that the RBS simulation results were reasonable.
The average
Vbio(40) percentage,
Vbio(40)/(
Vci +
Vrb) at the end of simulation,
t = 40 min, was larger when
hb was larger: 75.6 ± 0.2% for the
L = 10 m group (
hb = 0.4 m), 64.3 ± 11.8% for the
L = 20 m group, 40.3 ± 26.7% for the
L = 30 m group, and 24.2 ± 26.3% for the
L = 40 m group (
hb = 0.2 m). The higher
Vbio(40) percentage means that more runoff was ponded and waited for infiltration when the simulation ended. The ponding volume,
Vbio(40), for each case was compared with
Vpc, and the ratio ranged from 0.73 to 0.96 (
Table 7).
At the end of the simulation,
Vbio(40) was smaller than
Vpc, and the mean ratios of
Vbio/
Vpc were 0.77–0.95 for the changing
L. The results in
Table 7 and Equation (9) indicate that it is necessary to consider three parameters,
S0,
L, and
hb, when calculating the ponding capacity of the bioretention; this was especially important in the continuous RBS system when these three parameters changed in different RBSs. In this study, the vegetation volume fraction was not considered when calculating
Vpc, therefore, we need to use a safety factor to calculate the actual ponding volume based on the bioretention geometry and vegetation volume fraction when designing a continuous RBS system.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}