3.1. Case 1
The wet soil granular flow model was imported into the commercial software EDEM for simulation, the computational efficiency is limited by the large number of granular elements, thus the size of the DEM model established is very small, which can reflect real diameter of soil granular with a certain amount of particles. The model is shown in
Figure 6, the model consists inclined chute, side plate and wetted soil provenance and horizontal plane. The horizontal length of the base plate is 20 cm, the slope length is 16.77 cm, and the flume with a very thin width of 1.5 cm. The slope angle of this model is set to 27° (1:2), the vertical height of the slope is 7.5 cm, and the horizontal length of the chute is 15 cm.
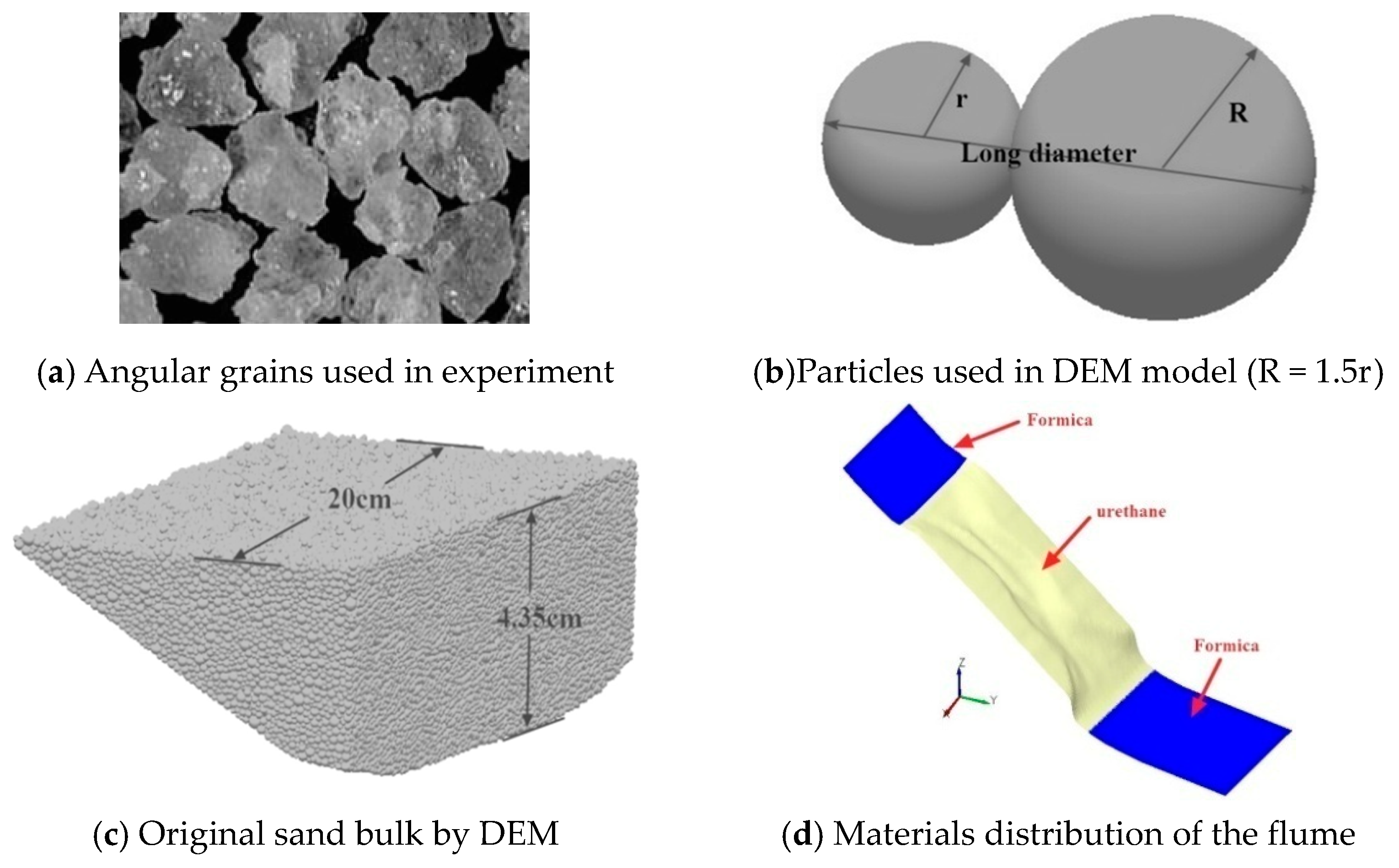
In this numerical experiment of Case 1, two particle size models were considered, with diameters of soil particles are 0.7 mm and 1 mm respectively, nevertheless, the original total deposit volume of the wet soil is the same. Consequently, the wet soil model with small particle size contains 13,604 particles, yet another wet soil model only contains 4645 particles.
For this study, the key factor to simulate wet soil granular flow using the JKR model is the surface energy (γ). The value of surface energy (γ) is solved by Equation (10). Under the condition that the soil granular is wetted by water at 20 °C, the degree of wetting is considered in two cases including complete wetted and incomplete wetted, thus the wetted angles are set at 0° and 60° in this experiment respectively, moreover, the diameter of soil particles in each model is the same.
When the liquid in wet soil is water and the temperature is about 20 °C, the surface tension of water
. In order to facilitate the calculation, we further proposed a liquid (water) surface energy coefficient
kw. According to Equation (4), the equation for calculating the surface energy of wetted soil is defined as
where the surface energy coefficient of water is
kw =
=
. When the soil particles are completely wetted, the wetted angle
= 0°.
As a result, the parameters of surface energy were solved through the above equations in 2 cases are 0.2 J/m
2 and 0.1 J/m
2 respectively, which represents two states of complete wetted and incomplete wetted. The other parameters used in this numerical experiment also include the density of granular element, Poisson’s ratio and friction coefficient. According to relevant references [
11,
15], other parameters used in this numerical test are listed in
Table 1.
Based on the formula derivation and calculation in the second and third parts above, the maximum surface energy of the wet soil granular flow numerical model is 0.2 J/m2 when the diameter of soil particles is the same. In order to facilitate comparative analysis, the numerical experiment considers three states of soil including complete wetting, incomplete wetting and non-wetting, the corresponding surface energy is 0.2 J/m2, 0.1 J/m2 and 0 J/m2, and the non-wetting state of soil is regarded as dry state. In addition, two calculation conditions including diameters of 0.7 mm and 1 mm are set for simulation.
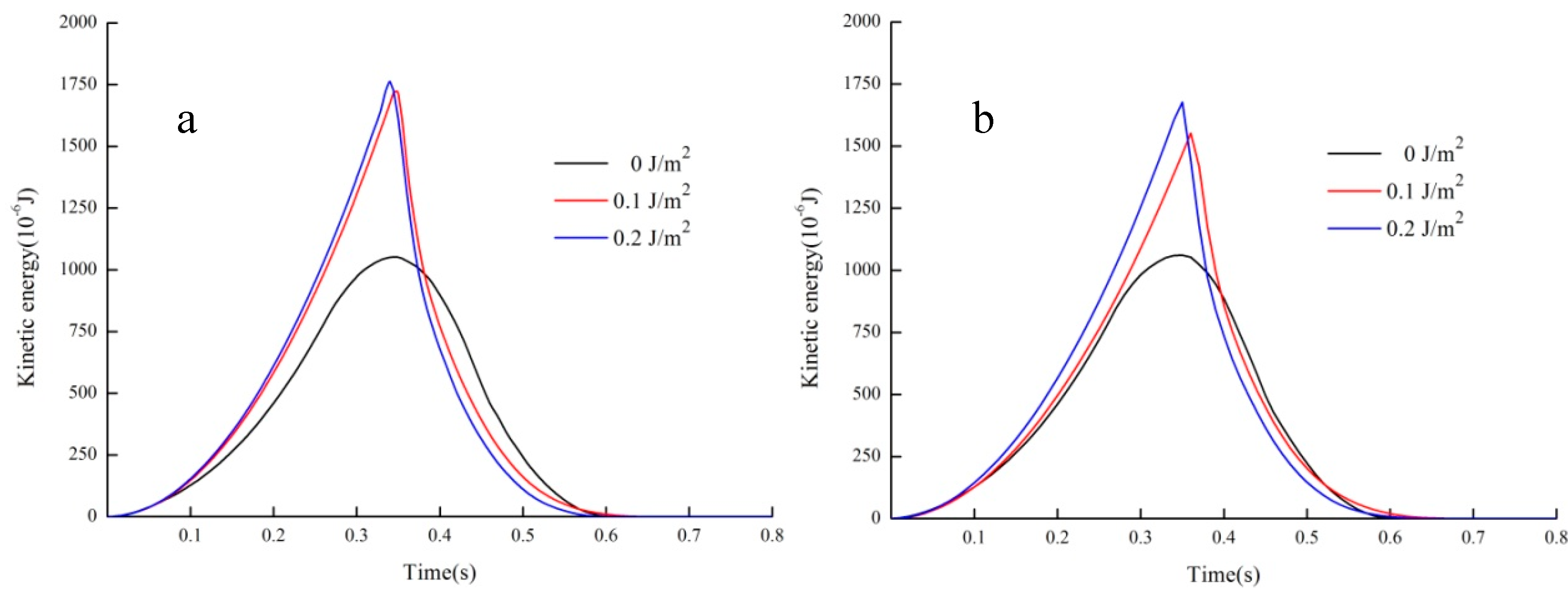
Figure 7 presents the overall sliding velocity of two sizes of soil particles with different surface energy, and
Figure 8 shows the kinetic energy at the corresponding time.
Figure 7a indicates that the sliding velocity of the whole soil increased first and then decreased, and finally stopped after about t = 0.6 s when the diameter of soil grains is 0.7mm. When the effect of water is considered, the motion characteristics of wet soil are almost the same when the surface energy is 0.2 J/m
2 and 0.1 J/m
2. When the surface energy is 0.2 J/m
2, the maximum velocity of soil avalanche is 74.5 cm/s with the corresponding time of t = 0.34 s, and when the surface energy is 0.1 J/m
2, the maximum velocity of soil is 73.4 cm/s and the corresponding time is t = 0.35 s. When the water is not considered, that the soil is composed of dry particles, the maximum velocity of the dry soil is 57 cm/s and the corresponding time is t = 0.35 s, which is much less than the velocity of the wet soil with surface energy applied.
In addition,
Figure 7b shows that when the diameter of soil granular increases to 1 mm, the sliding velocity of the whole soil increased firstly and then decreased gradually, which is similar to that of 0.7 mm. Nevertheless, the sliding process stopped after about t = 0.65 s, which is 0.05 s later than that of 0.7 mm, especially when the wetting effect of water considered. When the surface energy is 0.2 J/m
2, the maximum velocity of soil avalanche is 72.8 cm/s with the corresponding time is t = 0.35 s, yet when the surface energy is 0.1 J/m
2, the maximum velocity of soil is 70 cm/s, corresponding time is t = 0.36 s, it is obvious that the maximum velocity is smaller than diameter of soil particle 0.7mm, and the time to reach the peak velocity is also 0.01 s later. If water is not considered, the maximum velocity of soil sliding is 57 cm/s and the corresponding time is t = 0.35 s, which is same as that granular diameter of 0.7 mm.
The above results show that when the volume of the soil is the same, the average velocity of the dry soil is less affected by the granular size, while the granular size has a greater impact on the average velocity of the wet soil granular flow.
Moreover,
Figure 8 shows the total kinetic energy of two sizes of soil particles flow with different surface energy. The curve trend is almost the same as
Figure 7. Further analyses indicate that the larger surface energy is, the larger the maximum kinetic energy of soil sliding is when the particle size is the same. For example,
Figure 8a shows that the maximum kinetic energy of soil granular flow under three conditions of 0.2 J/m
2, 0.1 J/m
2 and 0 J/m
2 are 1763 × 10
−6 J, 1712 × 10
−6 J and 1050 × 10
−6 J respectively, while those with the diameter of 1 mm are 1677 × 10
−6 J, 1552 × 10
−6 J and 1061 × 10
−6 J, as shown in
Figure 8b.
As different surface energy and different soil granular sizes have different influences on the energy dissipation in the process of wet soil granular flow, further study of the wet soil granular flow motion characters is very important because the soil under natural conditions often changes between unsaturated and saturated states.
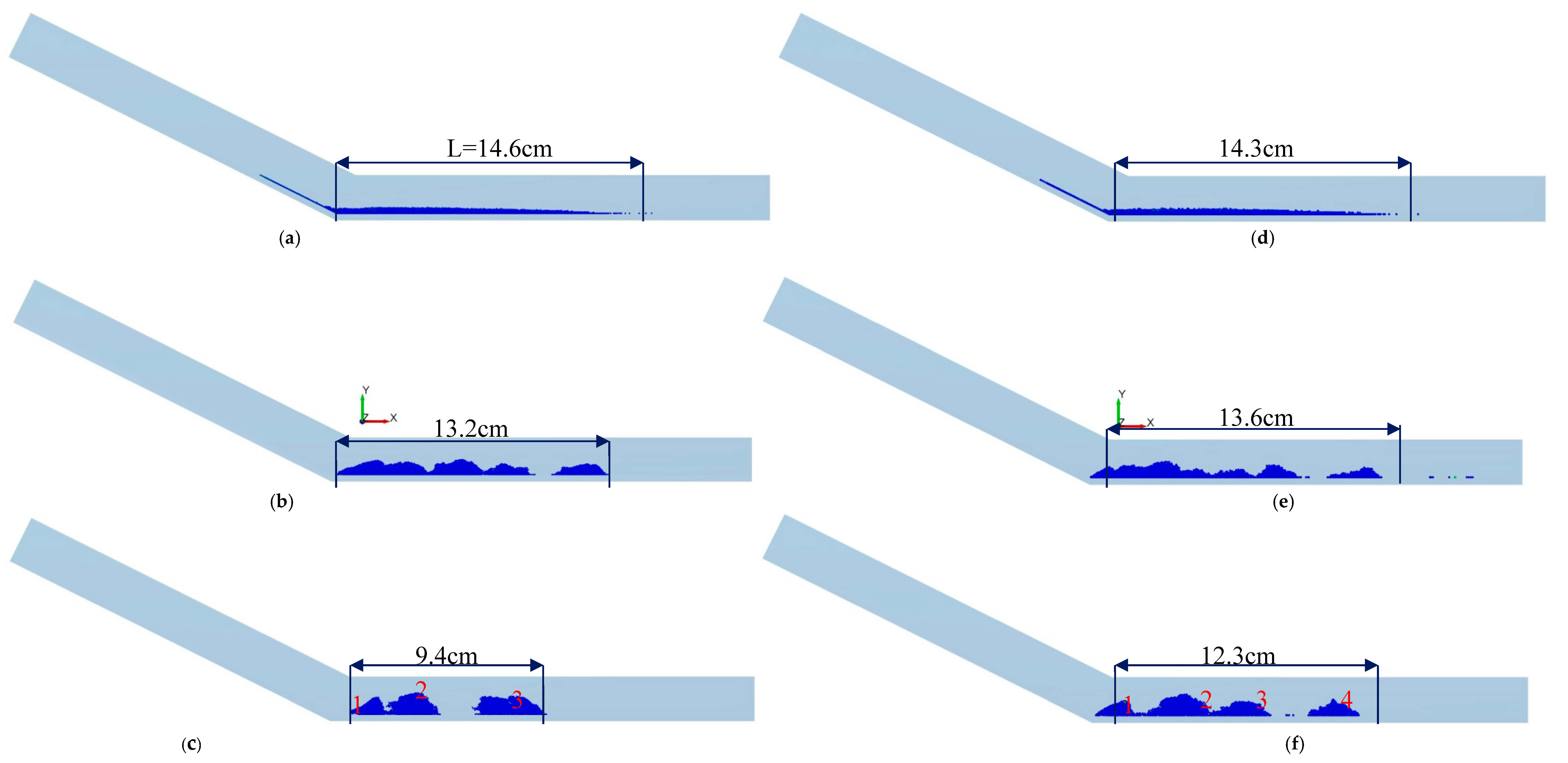
Figure 9 presents the final deposition of wet soil after the avalanche triggered, the left and right diagrams represent deposit results of soil-grain diameters of 0.7 mm and 1 mm respectively. The length of the bottom chute is 20 cm, which is sufficiently long to observe the runout distance of the soil granular flow.
As shown in
Figure 9, when the surface energy is zero and the water in soil is not considered. The dry soil granular avalanche has the longest runout distance on the horizontal plane. At this time, the runout distance is little affected by the diameter of soil particles, for instance, when the soil granular size is 0.7 mm, the runout distance is 14.6 cm, and when the soil particle size is 1 mm, the deposit length is 14.3 cm. With the increase of surface energy, the runout distance decreased gradually. When the soil is completely wetted with the surface energy of 0.2 J/m
2, the runout distance is 9.4 cm and 12.3 cm respectively, which indicates that the deposit length of soil granular with particle size of 0.7 mm is much shorter than that of 1 mm. However, when the soil is not completely wetted with the surface energy of 0.1 J/m
2, the deposit length is 13.2 cm and 13.6 cm respectively, the length of soil granular with 0.7 mm is only 0.4 cm shorter than that of 1 mm. These analyses depict that when the wetting effect of water is taken into account and the surface energy is the same, the larger diameter of soil particles is, the longer runout distance of the soil granular flow is, due to the better integration of the whole structure of small particles under the role of water adhesion. And the small soil grains connected structure during motion process is harder to be destroyed, thus there are fewer grain clusters in the final deposition.
As shown in
Figure 9c, when the diameter of grains is 0.7 mm, the wet soil disintegrated into 3 grain clusters, while when the diameter of grains is 1 mm, the soil disintegrated into 4 grain clusters. In other words, wet soil with larger particles requires larger liquid surface energy to keep the soil structure intact in the same state.
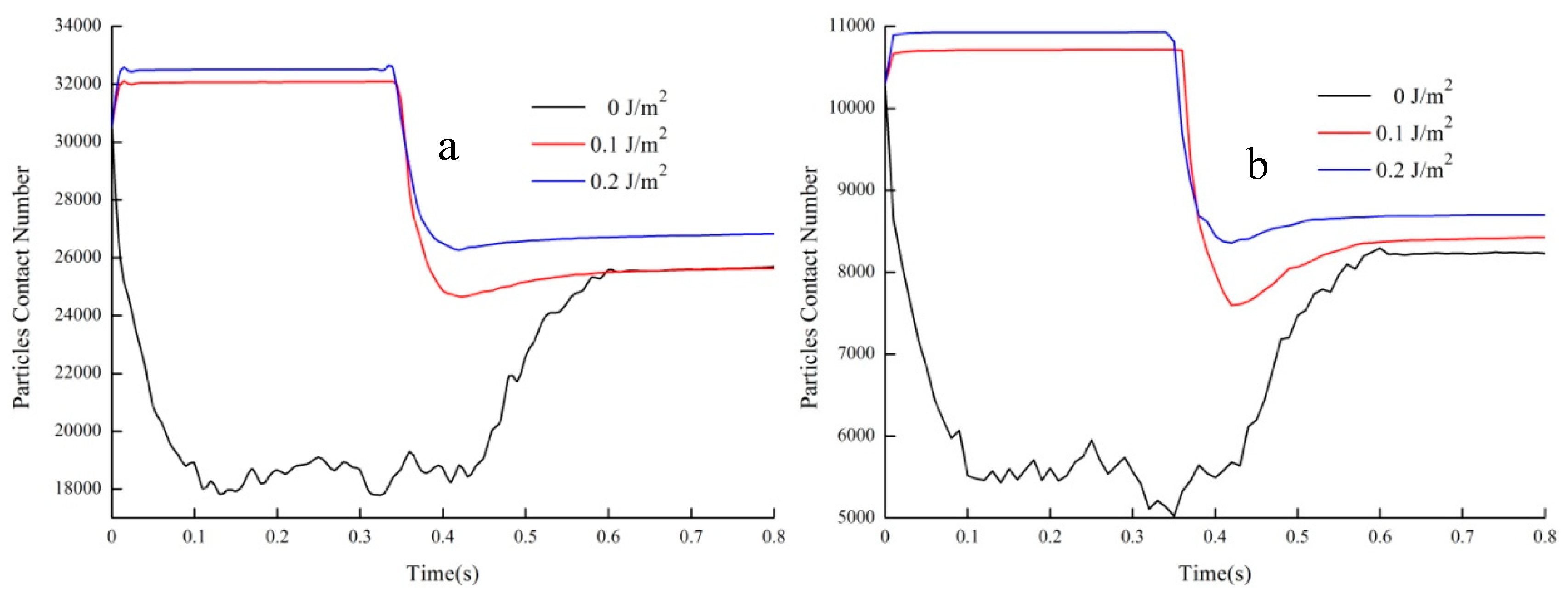
Figure 10 diagrams the change of contact number of particles during the process of soil avalanches with different surface energy when the soil-grain diameters are 0.7 mm and 1 mm. It is obvious to conclude that the contact number keeps stable from the soil avalanche triggered to 0.35 s when the soil is water bearing, because the structure of the original soil remained intact when sliding on the chute. Then the contact number reduced by more than a third in a very short time, then the contact number keeps unchanged until deposit at the horizontal plane.
However, when the soil granular is dry, the changing trend of contact number is very different from that considering surface energy, because the number of contacts declined sharply from the beginning to 0.1 s, then kept at a stable state until sliding to the horizontal plane at about 0.43 s and then the number of contacts began to increase again to 0.6 s, at this time, the number of contacts is basically the same as that at 0.1 J/m
2, especially when the soil-grain diameters is 0.7 mm, as shown in
Figure 10a.
In addition, we also studied the process of disintegration and destruction of wet soil. In order to facilitate the observation of soil structure destruction, we calculated the maximum force that could separate two particles depends on the surface tension of the liquid
γs and the wetted angle
. Therefore, Equation (8) or (9) could be used for calculation there, taking the case of d = 0.7 mm and
γ = 0.1 J/m
2 as an example, the force of
Fpullout was calculated as follows:
Because the size of the model is very small and the contact force is also very small, in order to facilitate the analysis, we unified the unit of force into dyn, and the results of force
Fpullout in four cases are listed at
Table 2.
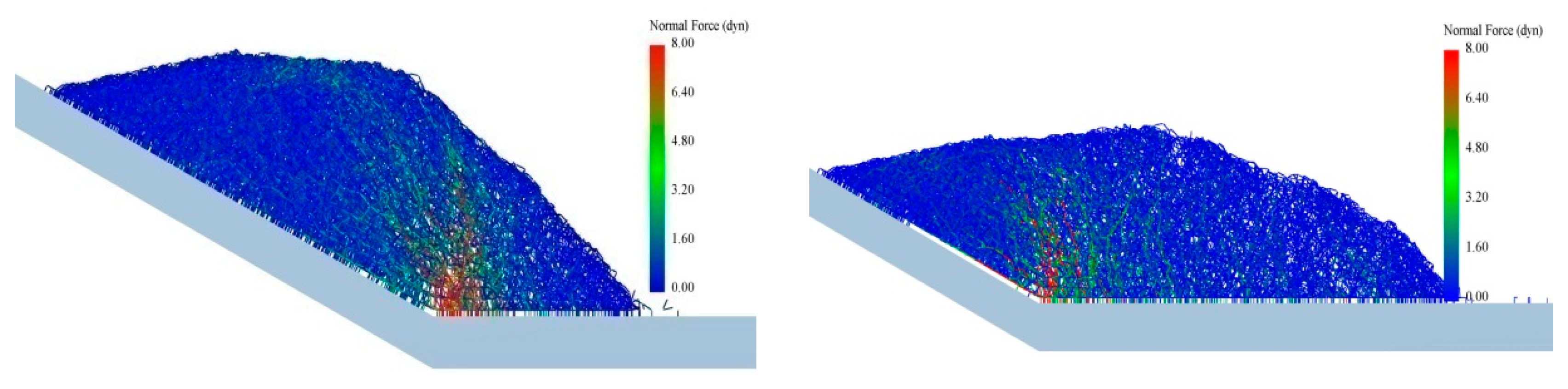
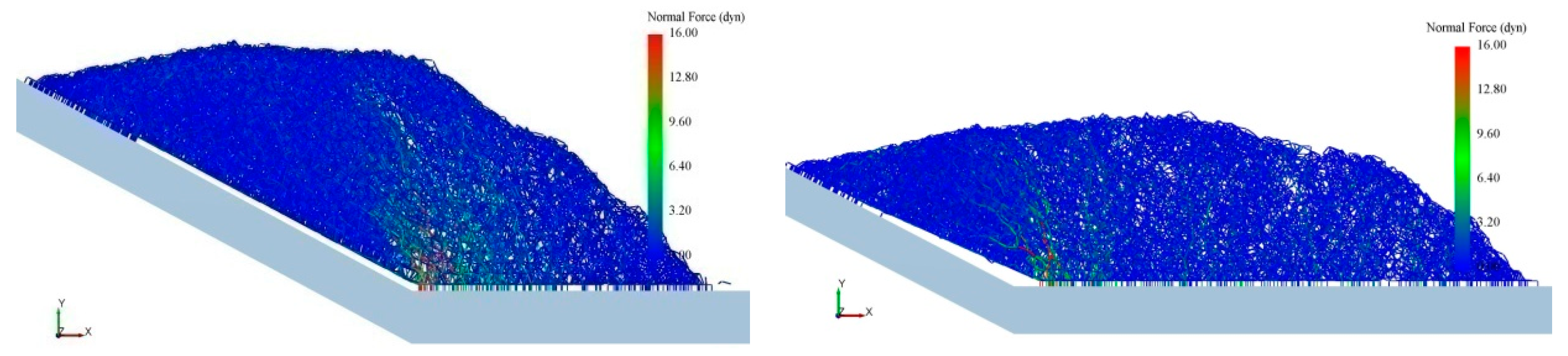
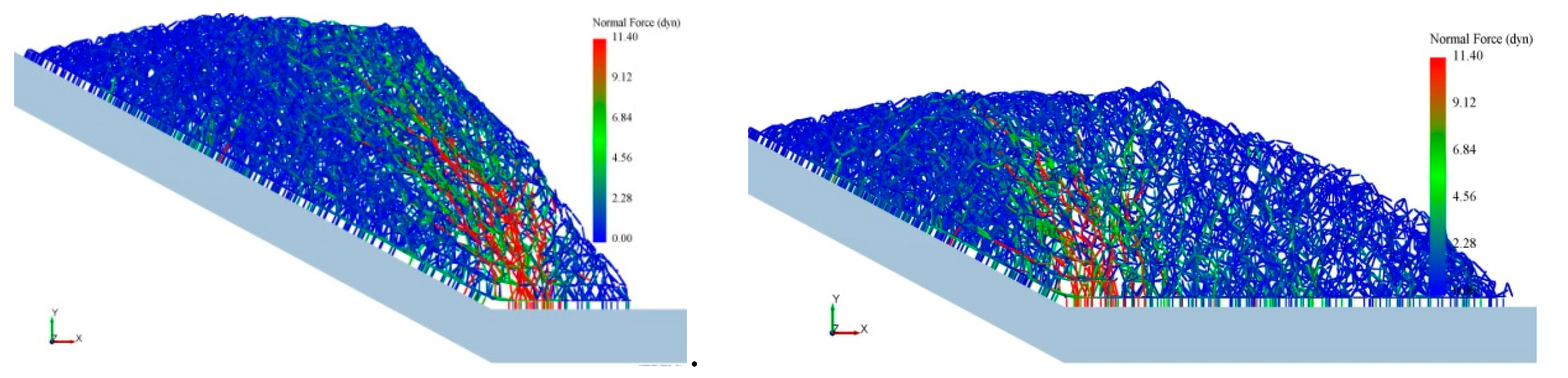
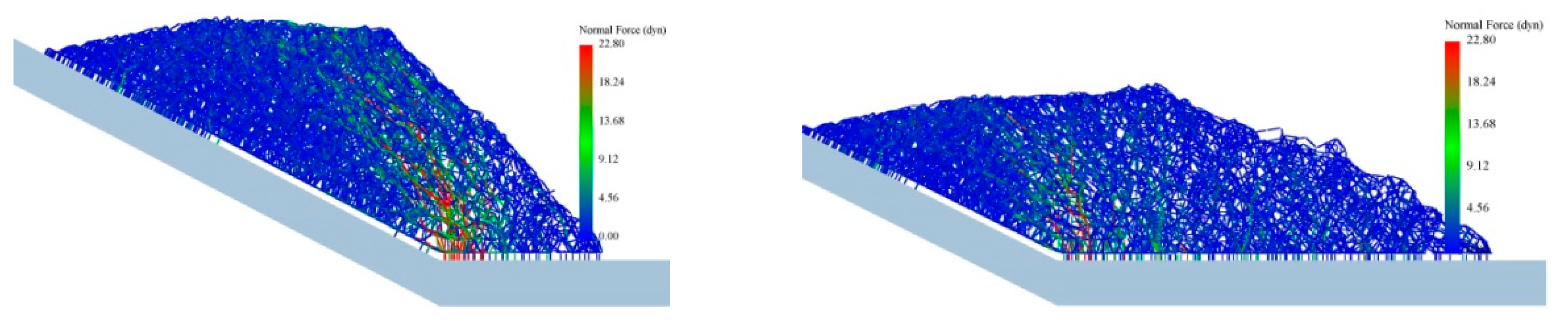
Since the structural damage of wet soil starts mainly from sliding to the foot of the slope, we derived the contact force and the force chain of four cases considering surface energy when sliding to the foot of the slope. As shown in
Figure 11,
Figure 12,
Figure 13 and
Figure 14, each figure contains two moments. For the convenience of observing the failure location of soil structure, we set
Fpullout in
Table 2 to the maximum normal force in the illustrations of corresponding cases. From the comprehensive analysis of
Figure 11,
Figure 12,
Figure 13 and
Figure 14, it could be clearly found that the contact structure will be destroyed when wet soil slides to the foot of the slope, extending directly from the slope foot to the interior of the wet soil, and the normal force also gradually decreases, but the damage degree of the four cases is different, and the red color areas in the graphs represent the locations and scopes of the structural damages.
It is obvious to conclude that the most serious damage of wet soil structure is the case of γ = 0.1 J/m
2 and d = 1mm, as shown in
Figure 13, however, the smallest damage of wet soil structure is the case of γ = 0.2 J/m
2 and d = 0.7mm, as shown in
Figure 12. Further analysis combined with
Figure 9e shows that the wet soil with large particles and small surface energy has the farthest runout distance, because most of the soil structure of wet soil is destroyed, and it is free from the bondage of the rear particles and also has a wider impact ranges. However, the runout distance of wet soil granular flow with small particle and large surface energy when γ = 0.2 J/m
2 and d = 0.7 mm is the shortest, because the whole soil structure of small particle is better combined by the adhesion of water, only a small part of the structure is destroyed during the motion process, and only a few large grain clusters are formed, as shown in
Figure 9c.
In summary, we can deduce that when the grain size is the same, wet soil with large surface energy can make the soil structure more solid during the kinetic process. Moreover, when the surface energy is the same, with the increase of particle size, the structure of soil grains is not compact enough, and the cohesion between water and soil is extreme poor. Furthermore, under the same external force, soil structure is more vulnerable to damage and more grain clusters will be formed. In a real water-bearing soil landslide, the impact scope of the wet soil avalanche disasters can also be expanded.
3.2. Case 2
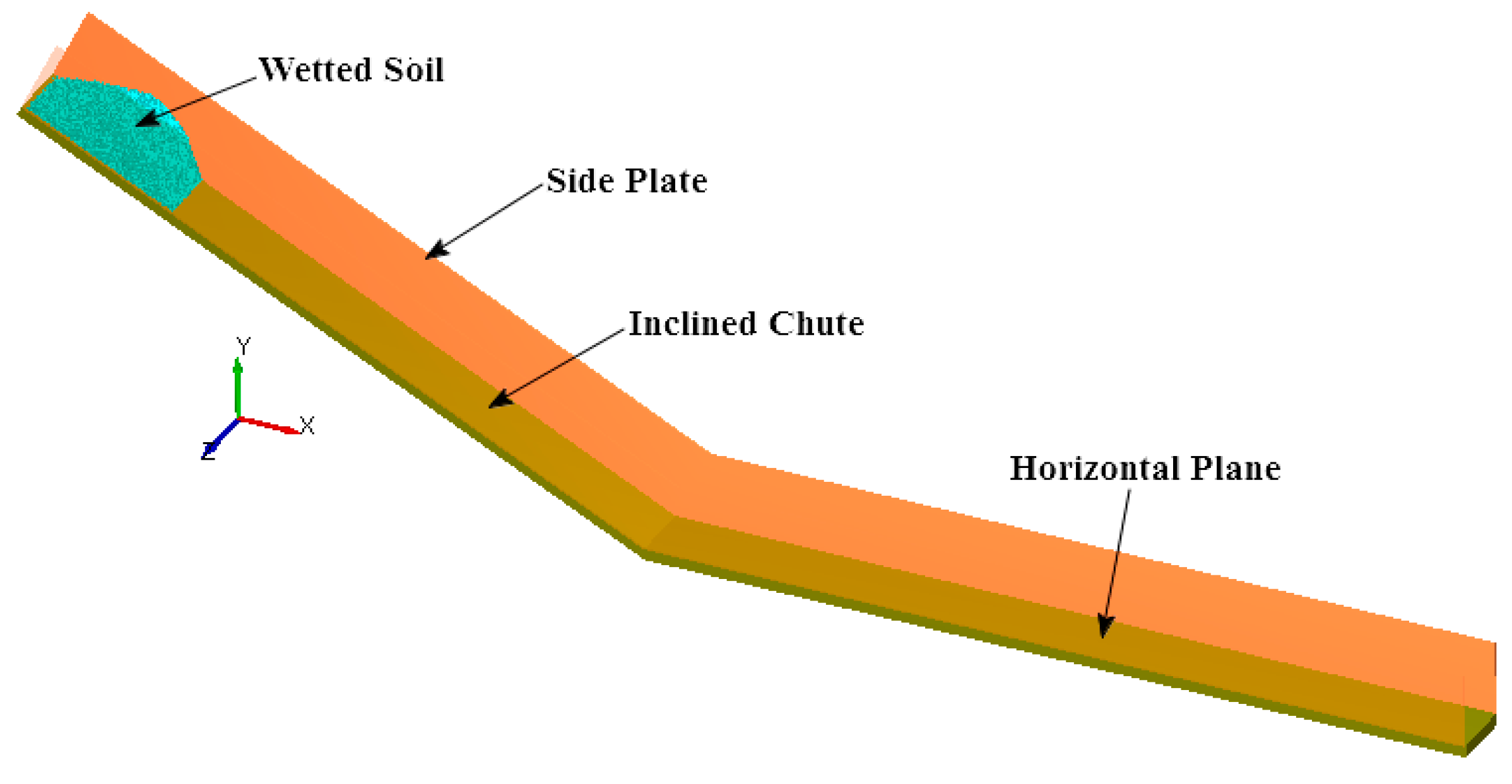
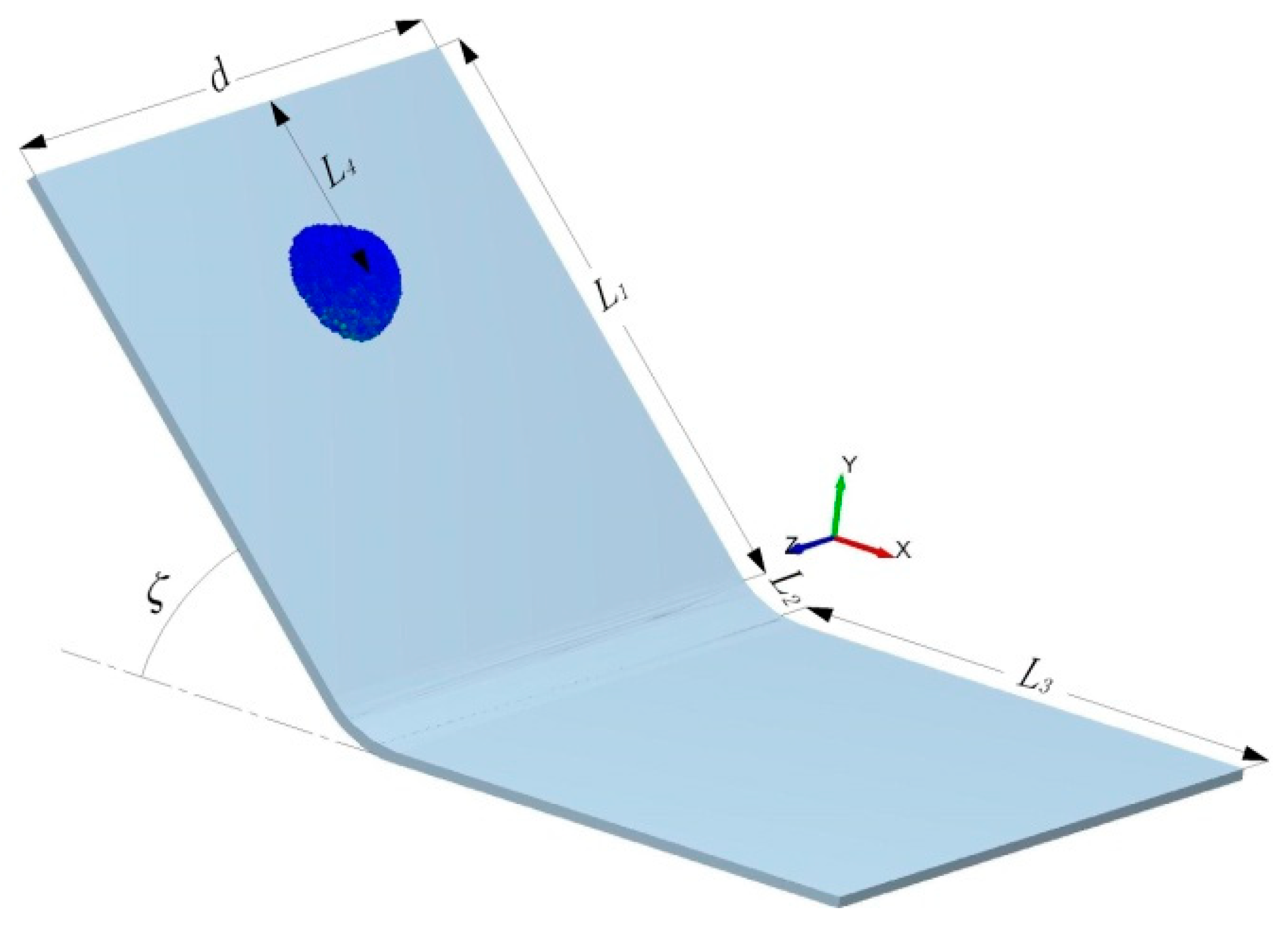
In addition, we studied the kinetic process of wet soil granular flow on other geometry, the geometric model of the chute geometry for the model tests is illustrated in
Figure 15. In order to differentiate it from the geometry in Case 1, there are no baffles on both sides of the slope of the geometric model in Case 2. The wet granular flow can be freely extended to both sides during the sliding process, and the slope is also much steeper than Case 1.
The chute is divided into three parts: the upper inclined zone, the circular transition zone and the horizontal runout zone. The inclination angle ζ of the upper inclined zone is 45°. If the inclination angle is zero the chute forms a flat plane with a total length of 383 mm. The chute width
d is about 220 mm. Other size information:
L1 = 187.2 mm,
L2 = 28.8 mm,
L3 = 167 mm,
L4 = 62.4 mm, the cap radius is 20 mm. The diameter of original source particles is all 1.5 mm, and the model contains 5651 particles. The bulk density is 1729 kg/m
3, and the total mass is 28.96 g. The surface energy including 0 J/m
2, 0.1 J/m
2 and 0.2 J/m
2 of the wet soil granular was calculated, which is same as case 1. The static friction coefficient between particles and the inclined plane is 0.45, and the other parameters used in case 2 are the same as
Table 1.
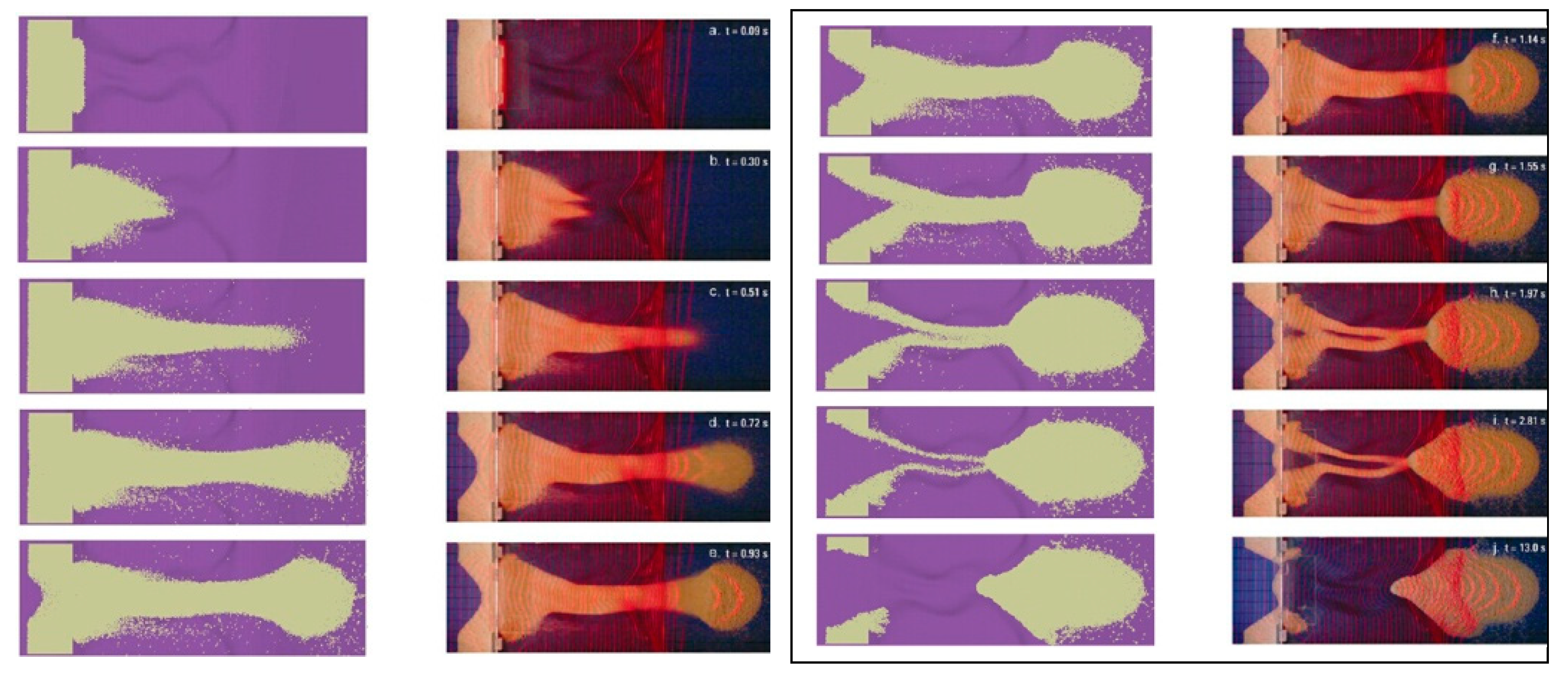
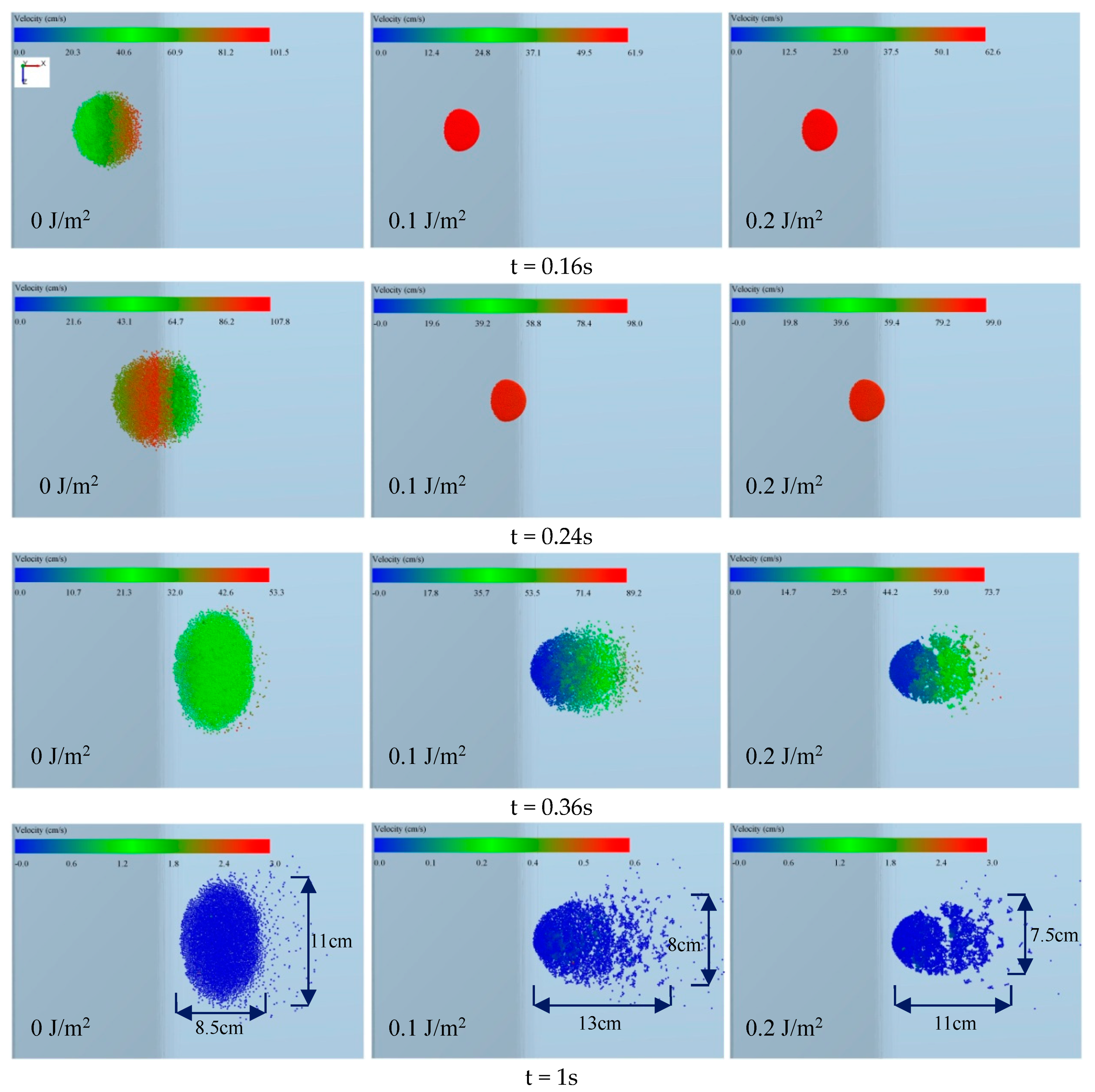
Figure 16 presents the motion process of wet soil particle flow on the 45° slope. From left to right, the calculated results including surface energy of 0 J/m
2, 0.1 J/m
2 and 0.2 J/m
2, respectively, also diagram the velocity distribution and morphological characteristics of wet soil granular flow. According to the average velocity curve in
Figure 17a, it can be deduced that the duration of wet soil granular flow with different surface energy from start to stop is basically the same for about 0.5 s.
When the surface energy is 0 J/m2, the particles of wet soil expand to both sides (Z direction) during the sliding process along the slope. The maximum velocity of granular flow exceeds 100 cm/s. In the end, when the grains deposit at the horizontal plane, the shape of the deposition is like an ellipse, with the length of 11 cm in Z direction and 8.5 cm in X direction.
In addition, when the surface energy is 0.1and 0.2 J/m2, the wet soil structure can maintain the hemispherical initial state when sliding on the slope until moves to the plane plate. Due to the action of inertia, the velocity of front particles of the moist soil is far larger than those in the rear, front particles overcome the water adhesion between grains to move forward. Moreover, runout distances of wet granular flow in X direction are 13 and 11 cm, respectively, which is far greater than dry grains of surface energy at 0 J/m2. However, the spreading distance in Z direction of wet soil granular flow on both sides is far smaller than that of dry grains, because the water adhesion between wet soil grains can prevent particles from expending to both sides, and with the increase of surface energy, the lateral extension length in Z direction decreases gradually.
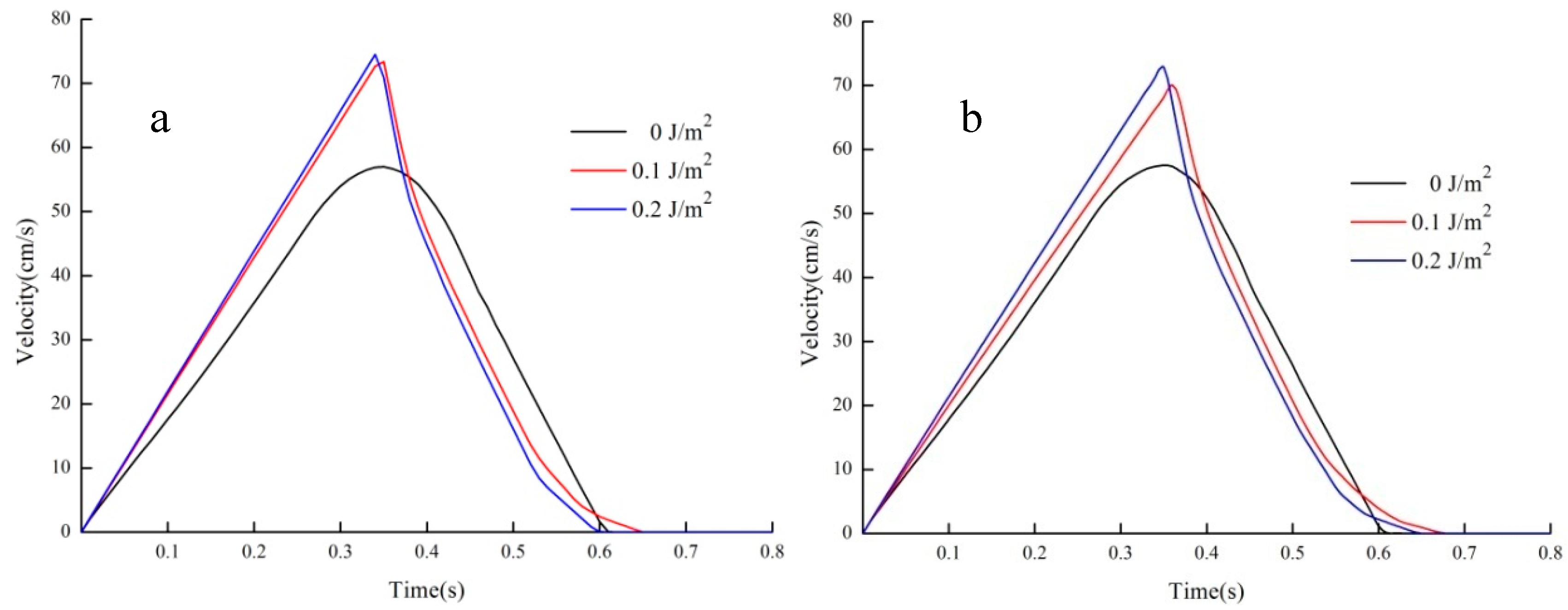
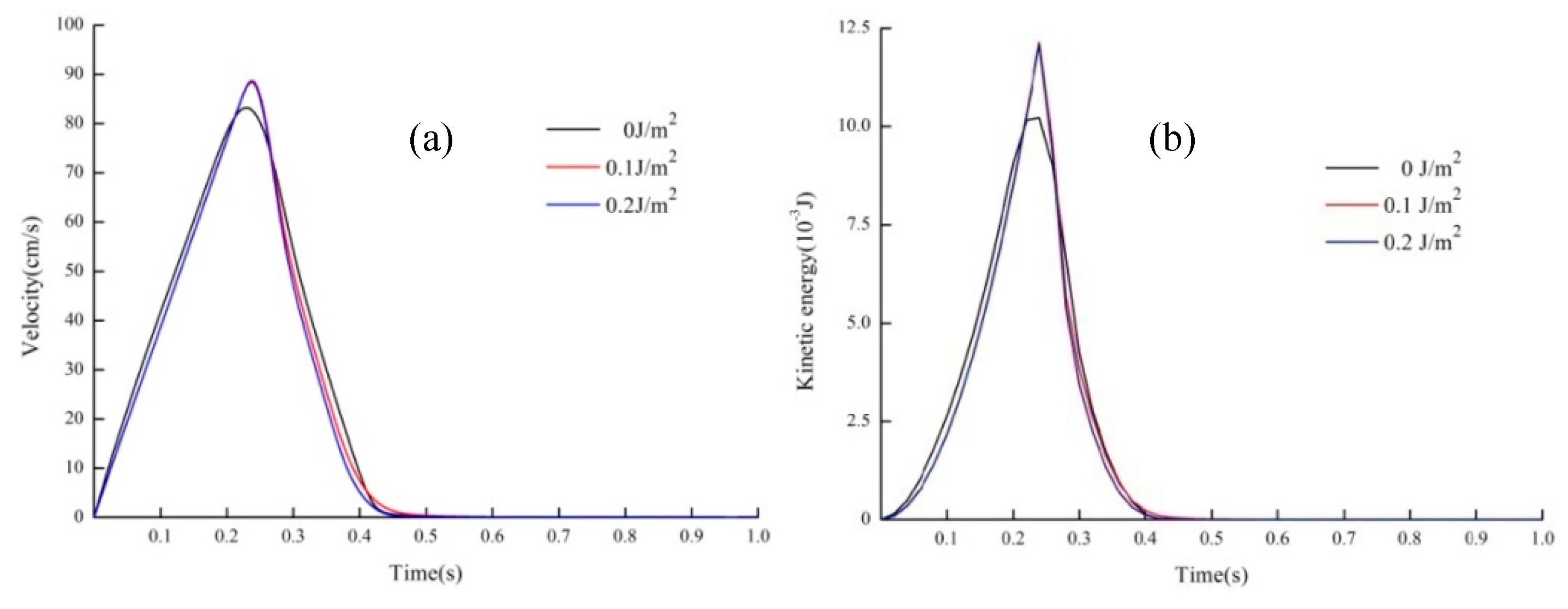
Figure 17a shows the overall sliding velocity with different surface energy, and
Figure 17b indicates the total kinetic energy of the wet granular flow at the corresponding time. It is obvious to conclude that the sliding velocity of the whole soil increased first and then decreased. And finally sliding stopped after about t = 0.5 s. When the adhesive effect of water is considered, the kinetic characteristics of wet soil are almost the same. The maximum velocity of soil avalanche exceeds 90 cm/s with the corresponding time is t = 0.24 s. However, when the soil is composed of dry particles, the maximum velocity of the dry soil is 83 cm/s and the corresponding time is t = 0.22 s.
Figure 17b also clarifies that the destructive force of wet particle flow is greater than that of dry particle flow when the bulk volume of original source is the same.
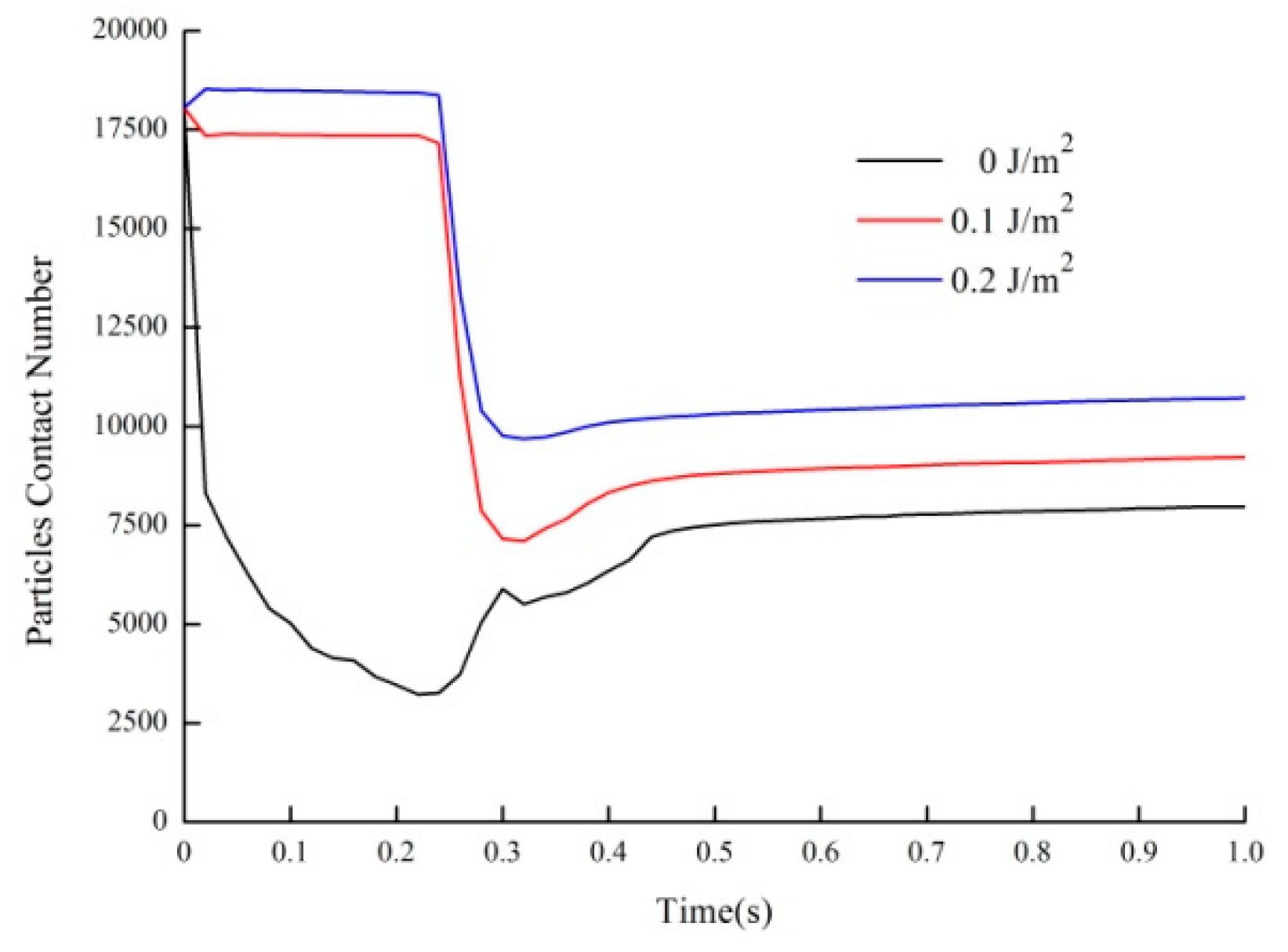
Figure 18 showsthe change of the contact number of particles during the process of wet soil avalanches with different surface energy. The contact number keeps stable from the wet soil avalanche triggered to 0.25 s when the surface energy is 0.1 and 0.2 J/m
2, because the structure of the original soil remained intact when sliding on the inclined chute. Then the contact number reduced by more than a half in a very short time, then the contact number remainsunchanged until deposit on the horizontal plane.However, when the soil granular is dry with the surface energy of 0 J/m
2, the number of contacts declined sharply from the beginning to 0.25 s and then the number of contacts began to increase again to 0.45 s.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}