Filtering Continuous River Surface Velocity Radar Data


Abstract
:1. Introduction
2. Methods
2.1. Statistic Method
2.2. Data Sampling
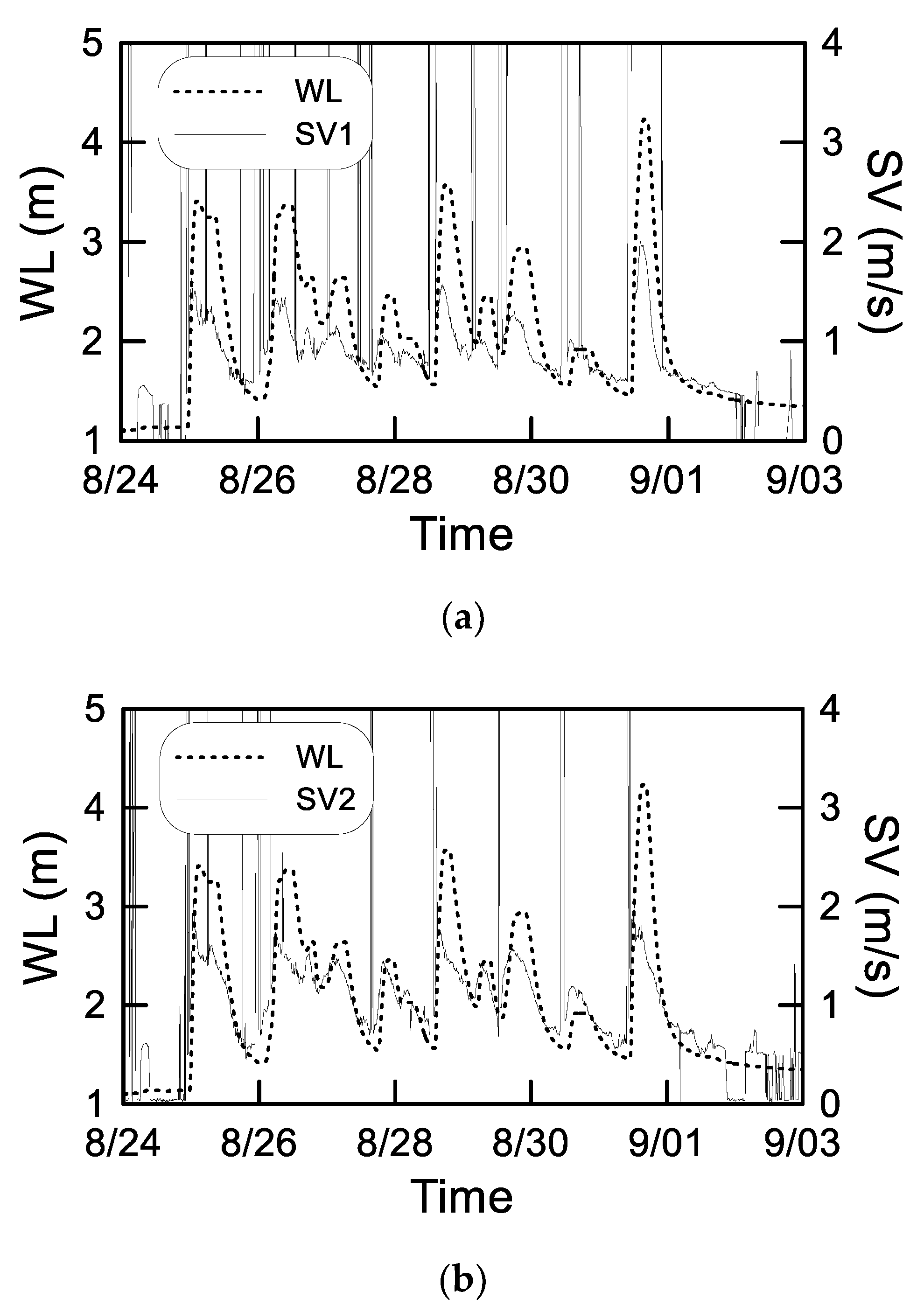
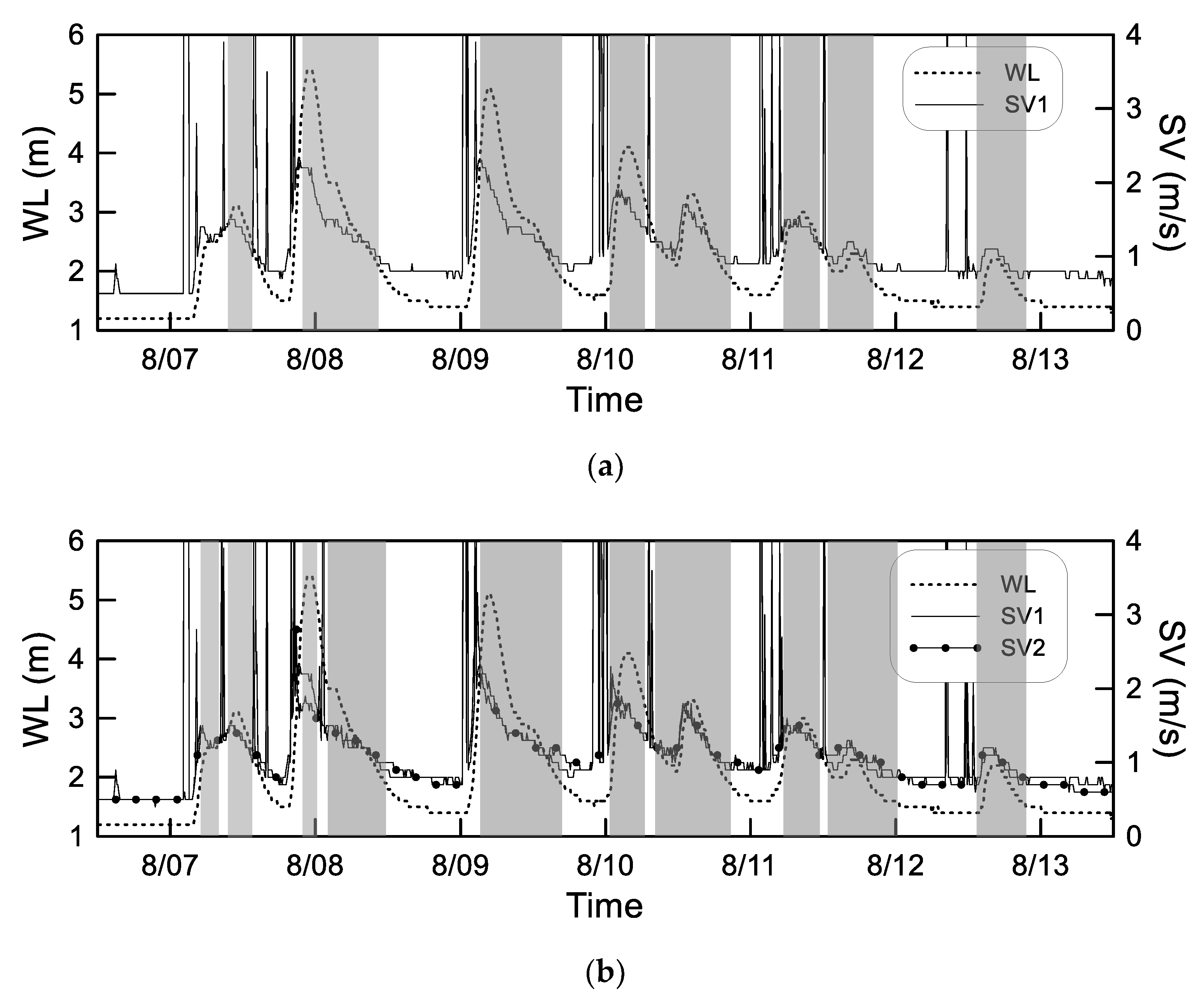
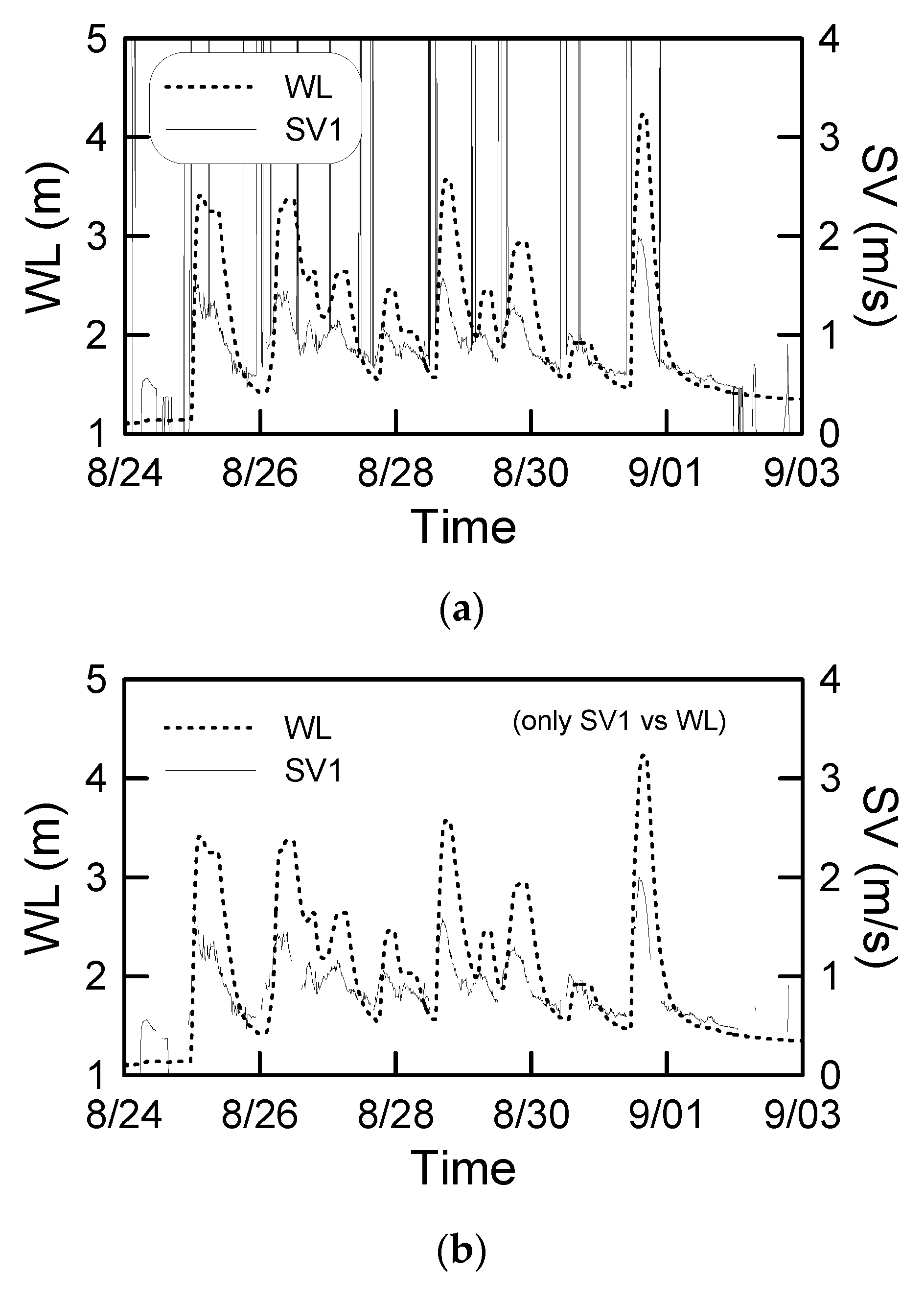
- The variations of SV and WL are similar during the same period.
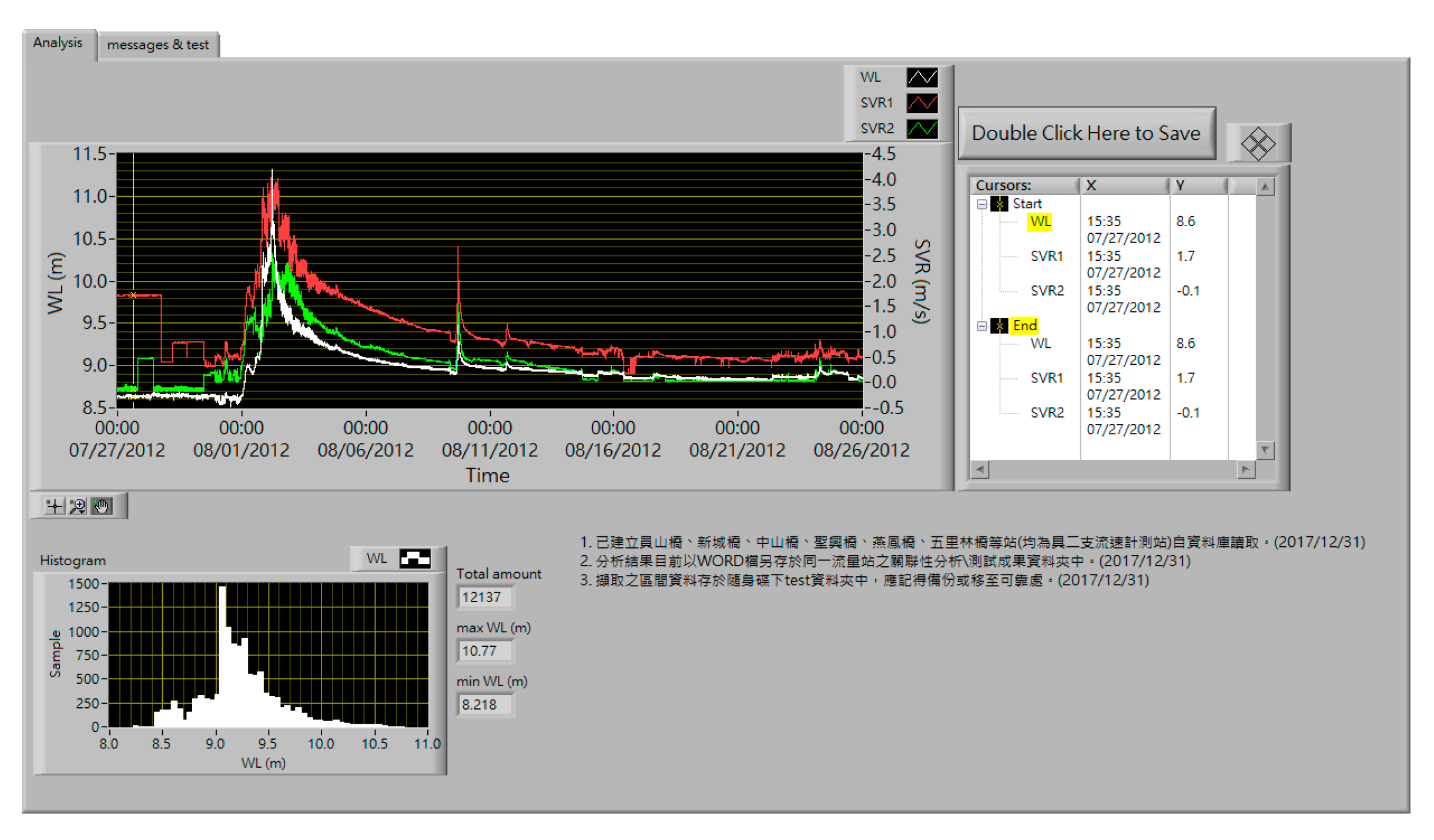
- Conspicuous spikes should be excluded.
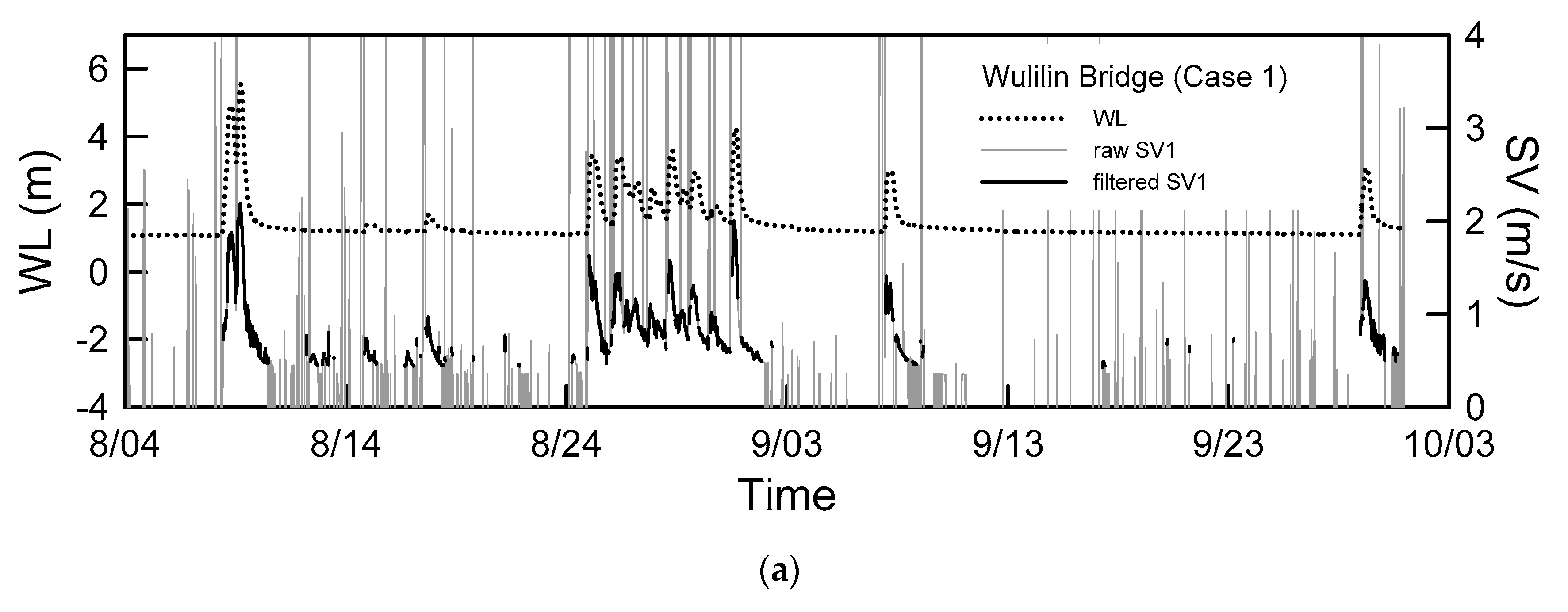
- The SV data at low and flat WLs that look unnatural should be excluded, such as those observed in the afternoon of August 8 and at midnight of August 12 in the blanking area in Figure 6a.
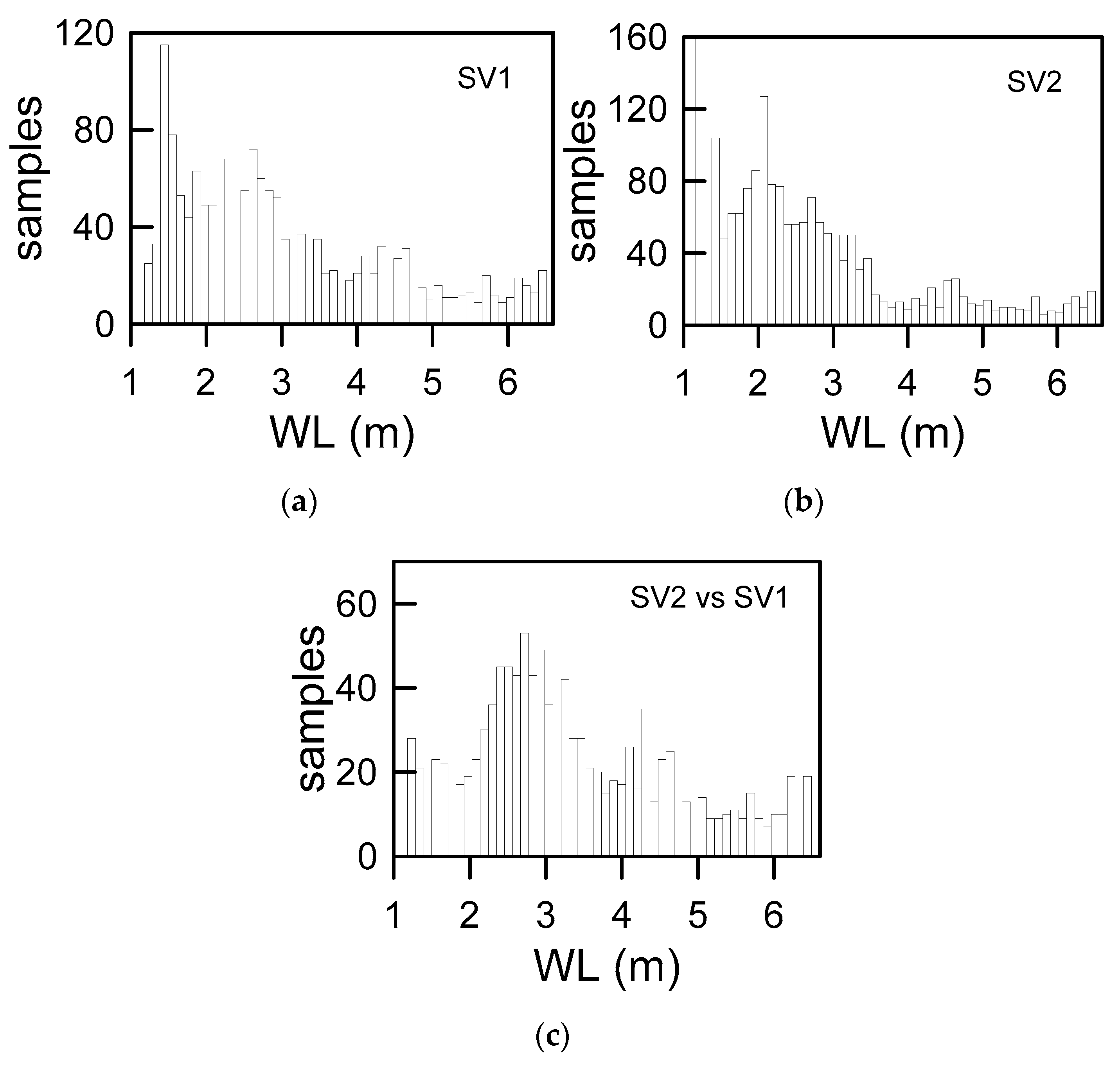
- If the SV data at a specific WL were sampled more than other WLs from the histogram, the SV data at the same WL would not be acquired thereafter.
- If the SV data amount at low and medium WLs is sufficient as indicated by the histogram, the lower WL events could be ignored and focus on only the higher WL events.
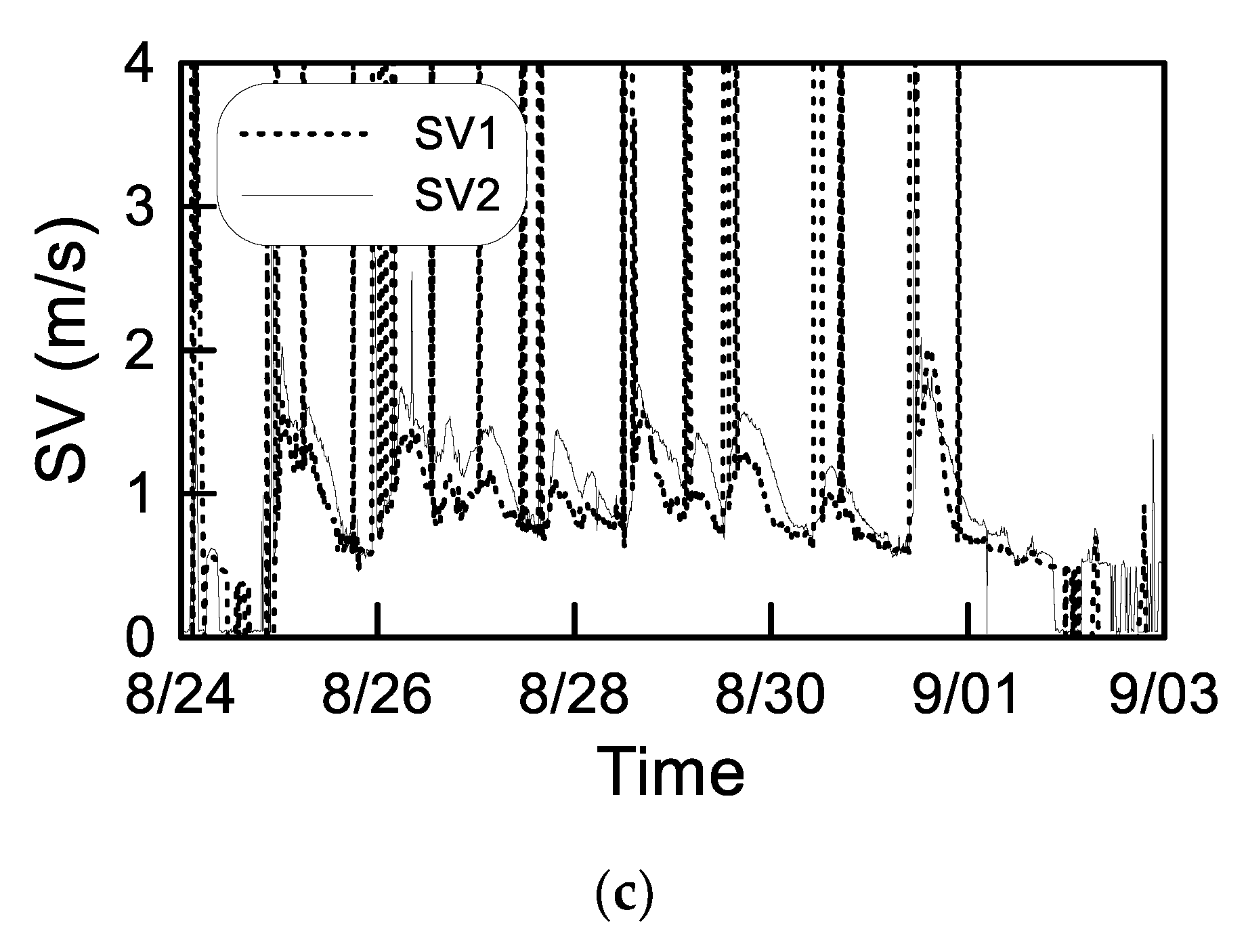
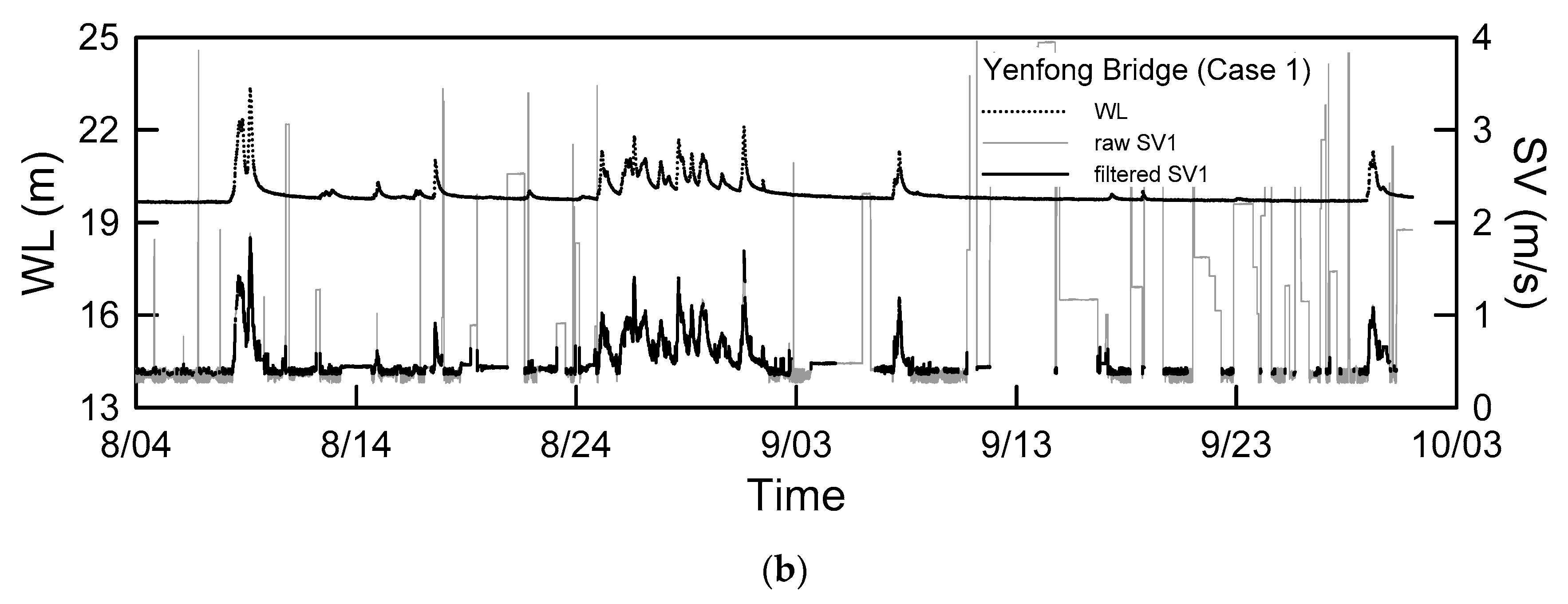
- The variations of SV1 and SV2 are similar in the same period, both trends exhibiting little difference with WL, such as those observed in the morning and night of August 7 and the afternoon of August 10, as shown in Figure 6b.
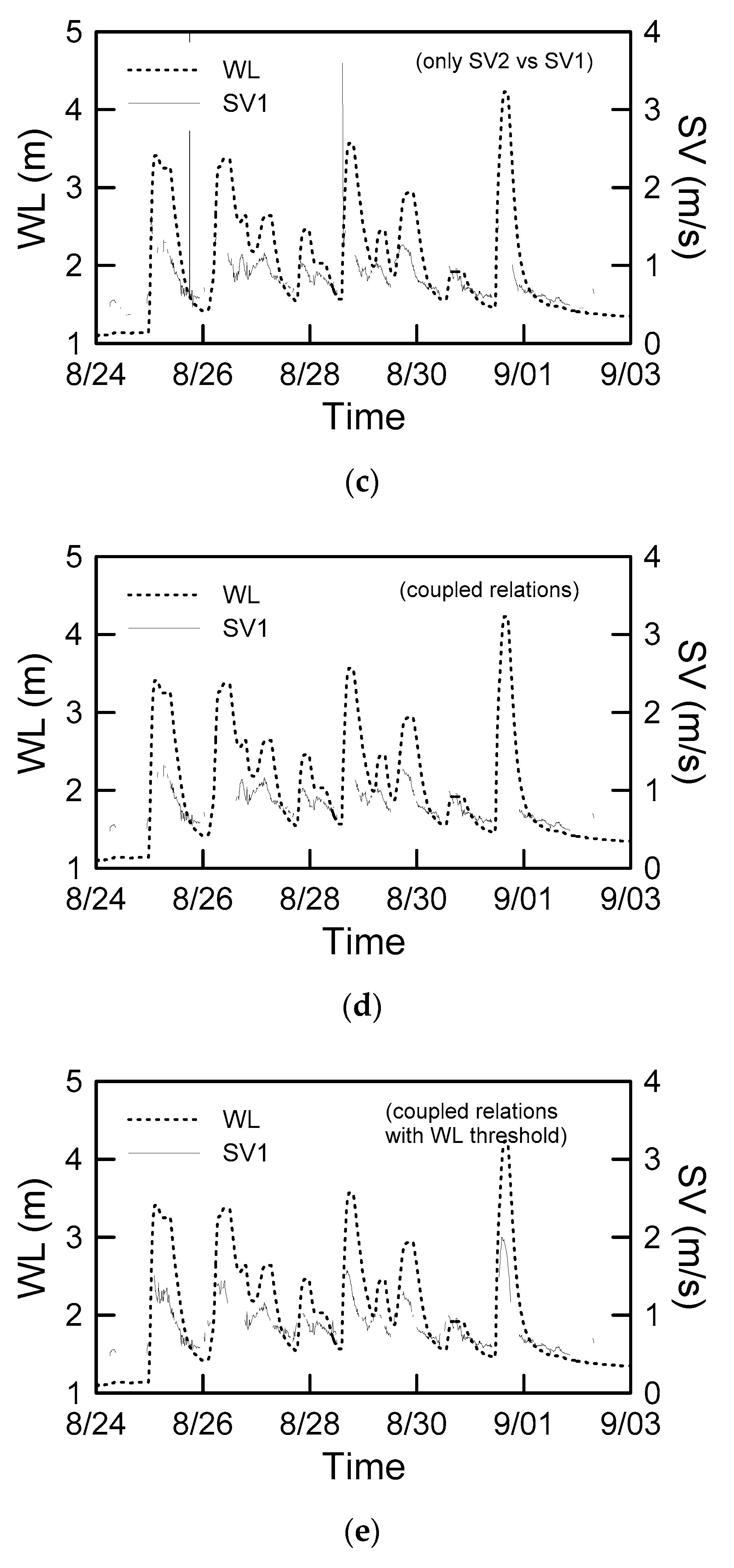
- If either SV1 or SV2 spikes exist, the data are excluded from the samples.
- If the SV data at a specific WL are sampled more than other WLs, the SV data at the WL would not be acquired thereafter.
- If the SV data amount at low and medium WLs is sufficient as indicated by the histogram, the lower WL events could be ignored and focus on only the higher WL events.
3. Results and Discussion
3.1. Samples Quality
3.2. Evaluation of the Different Regression Models
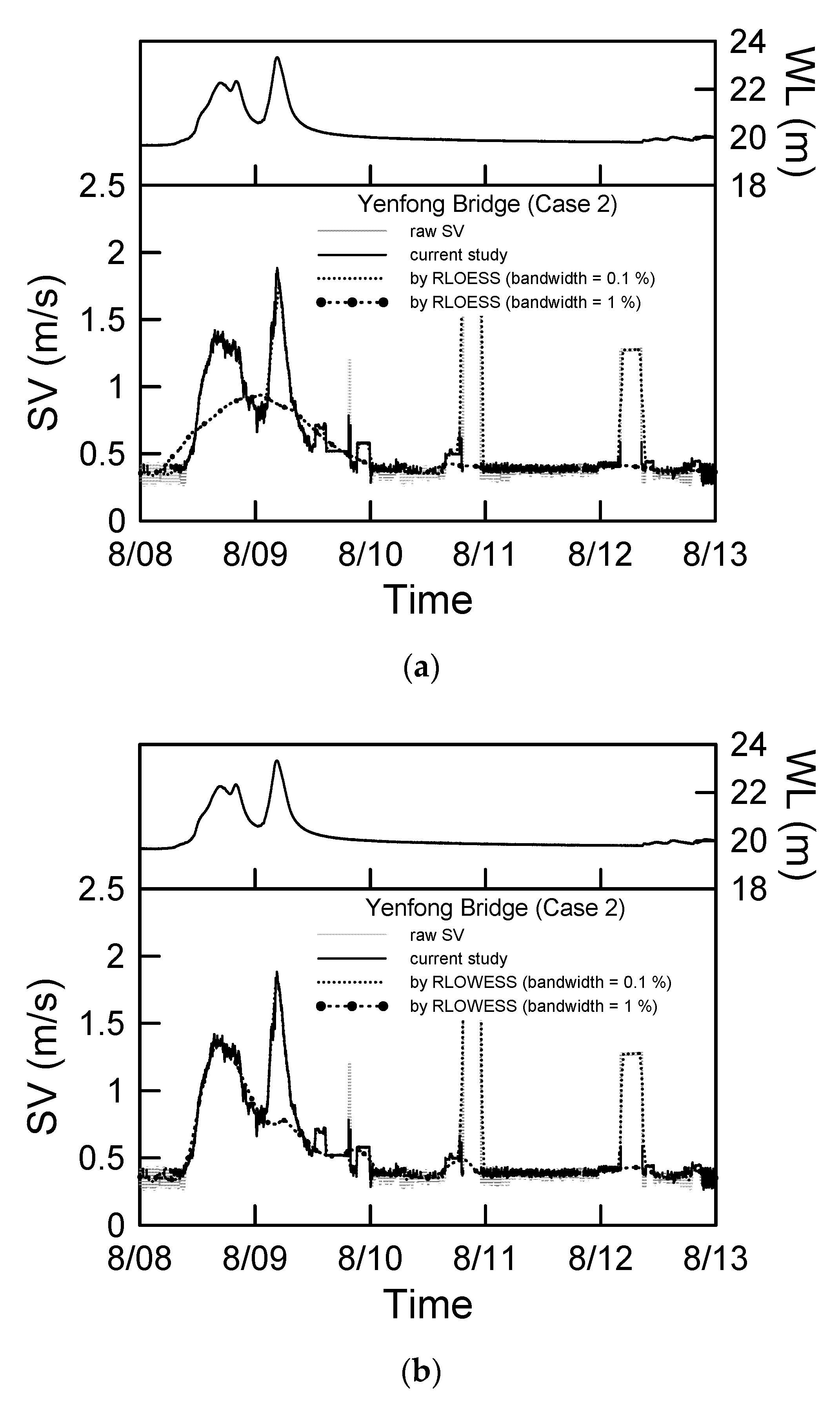
3.3. Comparison of Proposed Filter Method and Modern Smoothing Methods
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Aberle, J.; Rennie, C.D.; Admiraal, D.M.; Muste, M. Experimental Hydraulics: METHODS, Instrumentation, Data Processing and Management—Volume II: Instrumentation and Measurement Techniques; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Rantz, S.E. Measurement and Computation of Streamflow—Volume 2, Computation of Discharge; US Department of the Interior, Geological Survey: Reston, VA, USA, 1982; p. 373. [Google Scholar]
- Hidayat, H.; Vermeulen, B.; Sassi, M.G.; Torfs, P.J.J.F.; Hoitink, A.J.F. Discharge estimation in a backwater affected meandering river. Hydrol. Earth Sys. Sci. 2011, 15, 2717–2728. [Google Scholar] [CrossRef]
- Hoitink, A.J.F.; Buschman, F.A.; Vermeulen, B. Continuous measurements of discharge from a horizontal acoustic Doppler current profiler in a tidal river. Water Resour. Res. 2009, 45, W11406. [Google Scholar] [CrossRef]
- Nihei, Y.; Kimizu, A. A new monitoring system for river discharge with horizontal acoustic Doppler current profiler measurements and river flow simulation. Water Resour. Res. 2008, 44, W00D20. [Google Scholar] [CrossRef]
- Sassi, M.G.; Hoitink, A.J.F.; Vermeulen, B. Discharge estimation from H-ADCP measurements in a tidal river subject to sidewall effects and a mobile bed. Water Resour. Res. 2011, 47, W06504. [Google Scholar] [CrossRef]
- Fujita, I.; Muste, M.; Kruger, A. Large-scale particle image velocimetry for flow analysis in hydraulic engineering applications. J. Hydraul. Res. 1998, 36, 397–414. [Google Scholar] [CrossRef]
- Fujita, I.; Tsubaki, R.; Deguchi, T. PIV measurement of large-scale river surface flow during flood by using a high resolution video camera from a helicopter. In Proceedings of the 3rd Hydraulic Measurements and Experimental Methods Conference, Lake Placid, NY, USA, 10–12 September 2007; pp. 344–349. [Google Scholar]
- Costa, J.E.; Spicer, K.R.; Cheng, R.T.; Haeni, F.P.; Melcher, N.B.; Thurman, E.M.; Plant, W.J.; Keller, W.C. Measuring stream discharge by non-contact methods: A proof-of-concept experiment. Geophys. Res. Lett. 2000, 27, 553–556. [Google Scholar] [CrossRef]
- Costa, J.E.; Cheng, R.T.; Haeni, F.P.; Melcher, N.; Spicer, K.R.; Hayes, E.; Plant, W.; Hayes, K.; Teague, C.; Barrick, D. Use of radars to monitor stream discharge by noncontact methods. Water Resour. Res. 2006, 42, W07422. [Google Scholar] [CrossRef]
- Plant, W.J.; Keller, W.C.; Hayes, K.; Spicer, K. Streamflow properties from time series of surface velocity and stage. J. Hydraul. Eng. 2005, 131, 657–664. [Google Scholar] [CrossRef]
- Fulton, J.W.; Ostrowski, J. Measuring real-time streamflow using emerging technologies: Radar, hydroacoustics, and the probability concept. J. Hydrol. 2008, 357, 1–10. [Google Scholar] [CrossRef]
- Chiu, C.L. Velocity distribution in open channel flow. J. Hydraul. Eng. 1989, 115, 576–594. [Google Scholar] [CrossRef]
- Fukami, K.; Yamaguchi, T.; Imamura, H.; Tashiro, Y. Current status of river discharge observation using non-contact current meter for operational use in Japan. In Proceedings of the World Environmental and Water Resources Congress 2008: Ahupua’a, Honolulu, HI, USA, 12–16 May 2008. [Google Scholar]
- Corato, G.; Moramarco, T.; Tucciarelli, T. Discharge estimation combining flow routing and occasional measurements of velocity. Hydrol. Earth Syst. 2011, 15, 2979–2994. [Google Scholar] [CrossRef]
- Goring, D.G.; Nikora, V.I. Despiking acoustic Doppler velocimeter data. J. Hydraul. Eng. 2002, 128, 117–126. [Google Scholar] [CrossRef]
- Mori, N.; Suzuki, T.; Kakuno, S. Noise of acoustic Doppler velocimeter data in bubbly flows. J. Eng. Mech. 2007, 133, 122–125. [Google Scholar] [CrossRef]
- Islam, M.R.; Zhu, D.Z. Kernel density-based algorithm for despiking ADV data. J. Hydraul. Eng. 2013, 139, 785–793. [Google Scholar] [CrossRef]
- Fulton, J.W. Guidelines for Siting and Operating Surface-Water Velocity Radars. Available online: https://my.usgs.gov/confluence/display/SurfBoard/Guidelines+for+Siting+and+Operating+Surface-water+Velocity+Radars (accessed on 13 February 2018).
- Cleveland, W.S. Robust locally weighted regression and smoothing scatterplots. J. Am. Stat. Assoc. 1979, 74, 829–836. [Google Scholar] [CrossRef]
- Cleveland, W.S.; Devlin, S.J. Locally-weighted regression: An approach to regression analysis by local fitting. J. Am. Stat. Assoc. 1988, 83, 596–610. [Google Scholar] [CrossRef]
- Savitzky, A.; Golay, M.J.E. Smoothing and differentiation of data by simplified least squares procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]
- Sommer, Velocity radar RG-30 / RG-30A. Available online: https://www.sommer.at/en/products/water/velocity-radar-rg-30 (accessed on 11 April 2019).
- Henderson, F.M. Open Channel Flow; Macmillan Publishing Co: New York, NY, USA, 1966. [Google Scholar]
- Walpole, R.E.; Myers, R.H.; Myers, S.L.; Ye, K. Probability and Statistics for Engineers and Scientists, 8th ed.; Pearson Prentice Hall: Englewood Cliffs, NJ, USA, 2007. [Google Scholar]
- Farebrother, R.W. Least Absolute Residuals Procedure. In International Encyclopedia of Statistical Science; Springer: Heidelberg/Berlin, Germany, 2011. [Google Scholar]
- Muste, M.; Lyn, D.A.; Admiraal, D.M.; Ettema, R.; Nikora, V.; Garcia, M.H. Experimental Hydraulics: Methods, Instrumentation, Data Processing and Management—Vololum I: Fundamentals and Methods; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Bhaskar, B.; Desale, H. Median of the p value under the alternative hypothesis. Am. Stat. 2002, 56, 202–206. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
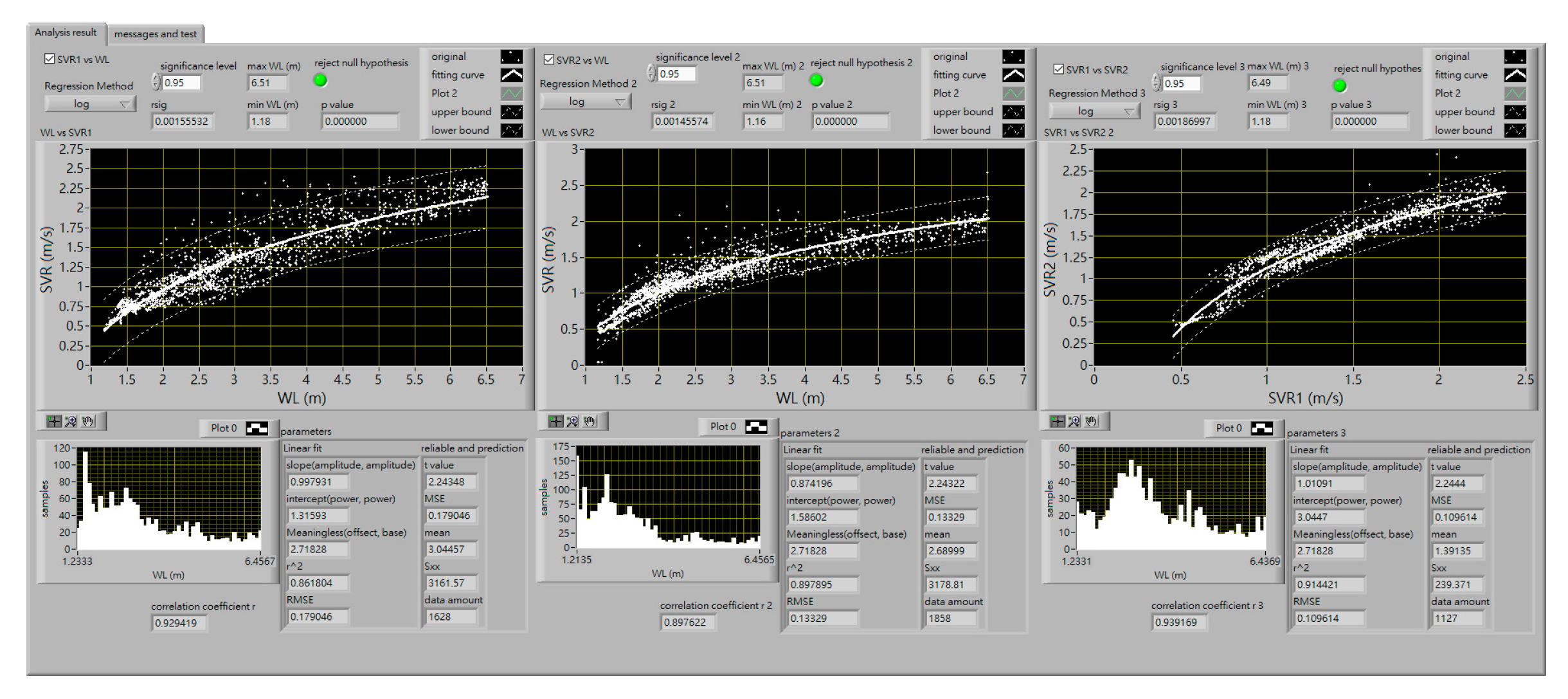
| Relations | WL Range (m) | Total Amount | Correlation Coefficient, r | t-Value (95% PI) | p-Value |
|---|---|---|---|---|---|
| SV1 vs. WL | 1.18–6.51 | 1628 | 0.929 | 2.24348 | 0.00000 |
| SV2 vs. WL | 1.16–6.51 | 1858 | 0.898 | 2.24322 | 0.00000 |
| SV2 vs. SV1 | 1.18–6.49 | 1127 | 0.939 | 2.24440 | 0.00000 |
| Relations | WL Range (m) | Total Amount | Correlation Coefficient, r | t-Value (95% PI) | p-Value |
|---|---|---|---|---|---|
| SV1 vs. WL | 19.72–24.78 | 15,649 | 0.913 | 2.24162 | 0.00000 |
| SV2 vs. WL | 19.73–24.24 | 10,986 | 0.952 | 2.24171 | 0.00000 |
| SV2 vs. SV1 | 19.95–24.20 | 12,518 | 0.932 | 2.24167 | 0.00000 |
| Goodness of Fit, R2 | |||
|---|---|---|---|
| Model | SV1 vs. WL | SV2 vs. WL | SV2 vs. SV1 |
| linear | 0.863819 | 0.805726 | 0.882038 |
| power law | 0.870878 | 0.844804 | 0.896101 |
| log law | 0.861804 | 0.897895 | 0.914421 |
| exponent | 0.817192 | 0.720997 | 0.831854 |
| Goodness of Fit, R2 | |||
|---|---|---|---|
| Model | SV1 vs. WL | SV2 vs. WL | SV2 vs. SV1 |
| linear | 0.833211 | 0.905584 | 0.868264 |
| power law | 0.781072 | 0.845493 | 0.868966 |
| log law | 0.832321 | 0.905469 | 0.881542 |
| exponential | 0.764715 | 0.833562 | 0.783571 |
| Detecting rate by PI (%) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Period | WLmin (m) | WLmax (m) | SVR1 | SVR2 | |||||||
| Relation | SV vs WL | SVs | SV vs WL & SVs a | SV vs WL & SVs b | SV vs WL | SVs | SV vs WL & SVs a | SV vs WL & SVs b | |||
| Case 1 | 2015 8/01–10/05 | 1.06 | 5.54 | 51.79 | 79.91 | 80.83 | 75.24 | 75.70 | 79.91 | 80.83 | 75.22 |
| Case 2 | 2015 8/08–8/09 | 1.06 | 5.54 | 7.27 | 27.68 | 31.49 | 23.18 | 24.57 | 27.68 | 31.48 | 25.61 |
| Case 3 | 2015 8/25–8/31 | 1.39 | 4.23 | 13.58 | 19.67 | 25.76 | 13.60 | 11.80 | 19.67 | 25.76 | 12.58 |
| Case 4 | 2016 9/27–9/29 | 1.23 | 7.01 | 10.63 | 25.06 | 30.43 | 11.06 | 21.74 | 25.06 | 30.43 | 23.08 |
| Case 5 | 2017 7/29–8/02 | 1.28 | 6.81 | 30.35 | 44.16 | 52.14 | 30.74 | 21.21 | 44.16 | 52.14 | 21.79 |
| Detecting rate by PI (%) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Period | WLmin (m) | WLmax (m) | SVR1 | SVR2 | |||||||
| Relation | SV vs WL | SVs | SV vs WL & SVs a | SV vs WL & SVs b | SV vs WL | SVs | SV vs WL & SVsa | SV vs WL & SVsb | |||
| Case 1 | 2015 8/01–10/05 | 19.65 | 23.33 | 27.56 | 52.55 | 57.51 | 56.62 | 26.56 | 52.65 | 57.51 | 56.62 |
| Case 2 | 2015 8/08–8/09 | 19.65 | 23.33 | 0.76 | 18.96 | 23.45 | 16.22 | 11.88 | 18.95 | 23.45 | 16.78 |
| Case 3 | 2015 8/25–8/31 | 19.92 | 22.10 | 0.11 | 3.66 | 6.68 | 0.27 | 0 | 3.66 | 3.68 | 0.16 |
| Case 4 | 2016 9/27–9/29 | 19.89 | 26.11 | 48.02 | 39.89 | 78.49 | 68.66 | 73.59 | 39.89 | 78.49 | 75.82 |
| Case 5 | 2017 7/29–8/02 | 19.73 | 26.16 | 1.60 | 100 | 100 | 23.11 | 100 | 100 | 100 | 100 |
| Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Bandwidth | 0.1 % | 0.5 % | 1 % | 0.1 % | 0.5 % | 1 % | 0.1 % | 0.5 % | 1 % | 0.1 % | 0.5 % | 1 % | 0.1 % | 0.5 % | 1 % |
| MA | 12.9 | 15.5 | 13.5 | 5.9 | 4.4 | 3.7 | 27.3 | 32.7 | 28.0 | 4.5 | 3.4 | 1.1 | 11.9 | 12.6 | 11.5 |
| SGOLAY | 16.3 | 16.4 | 11.2 | 4.5 | 3.7 | 4.5 | 33.9 | 34.5 | 22.9 | 3.7 | 1.6 | 0.9 | 13.1 | 14.3 | 14.4 |
| LOESS | 16.2 | 15.4 | 10.4 | 3.9 | 3.5 | 4.0 | 34.1 | 32.4 | 21.1 | 3.7 | 2.1 | 1.0 | 11.3 | 12.9 | 12.6 |
| RLOESS | 10.6 | 10.9 | 7.5 | 14.8 | 12.9 | 9.9 | 15.3 | 11.7 | 6.2 | 8.0 | 6.1 | 3.8 | 17.0 | 13.5 | 12.8 |
| LOWESS | 13.9 | 14.9 | 11.7 | 4.8 | 3.7 | 3.8 | 29.3 | 31.5 | 24.2 | 2.5 | 1.2 | 0.9 | 13.7 | 12.9 | 14.1 |
| RLOWESS | 13.7 | 13.9 | 9.7 | 22.0 | 23.6 | 11.3 | 13.7 | 13.9 | 14.0 | 3.6 | 3.4 | 1.5 | 11.6 | 18.3 | 14.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.-W.; Lin, G.-F.; Tfwala, S.S.; Hong, J.-H. Filtering Continuous River Surface Velocity Radar Data. Water 2019, 11, 764. https://doi.org/10.3390/w11040764
Wang H-W, Lin G-F, Tfwala SS, Hong J-H. Filtering Continuous River Surface Velocity Radar Data. Water. 2019; 11(4):764. https://doi.org/10.3390/w11040764
Chicago/Turabian StyleWang, Hau-Wei, Gwo-Fong Lin, Samkele Sikhulile Tfwala, and Jian-Hao Hong. 2019. "Filtering Continuous River Surface Velocity Radar Data" Water 11, no. 4: 764. https://doi.org/10.3390/w11040764
APA StyleWang, H.-W., Lin, G.-F., Tfwala, S. S., & Hong, J.-H. (2019). Filtering Continuous River Surface Velocity Radar Data. Water, 11(4), 764. https://doi.org/10.3390/w11040764