2.2. The Wave Propagation Model MILDwave
The wave propagation model used within this research is the mild-slope model MILDwave developed at the Coastal Engineering Research Group of Ghent University in Belgium ([
14,
22]). In recent years, MILDwave has been widely used in the modelling of “far-field” effects of WEC arrays ([
12,
13,
17,
25,
29]) as it has proven to be a robust and efficient numerical model for calculating wave propagation through WEC arrays and over large coastal areas.
MILDwave is a phase-resolving model based on the depth-integrated mild-slope equations of [
30] given in Equations (
1) and (
2). MILDwave describes the wave transformations (shoaling and refraction) of regular, irregular, and short-crested waves with a narrow frequency band propagating above mildly varying bathymetries.
with
the surface elevation,
g the acceleration of gravity,
t the time,
is the velocity potential,
C the phase velocity and
the group velocity for a wave with wave number,
k, and angular frequency,
. MILDwave uses an internal wave generation line near the offshore boundary by applying the source term addition method introduced by [
31] where the source term propagates with the energy velocity,
.
is the velocity of disturbance caused by the incident wave. According to this method, an additional surface elevation with the desired energy
is added to the calculated surface elevation
at the wave generation line for each time step and is given by Equation (
3):
where
is the grid size in the x-axis,
is the time step,
is the angle of the incident wave ray from x-axis,
is the incident wave surface elevation.
In the MILDwave-NEMOH coupled model a single internal wave generation line combined with periodic lateral boundaries is recently used. Periodic lateral boundaries have been implemented by [
32] allowing the model to create homogeneous wave fields of oblique regular, long-crested, and short-crested irregular waves.
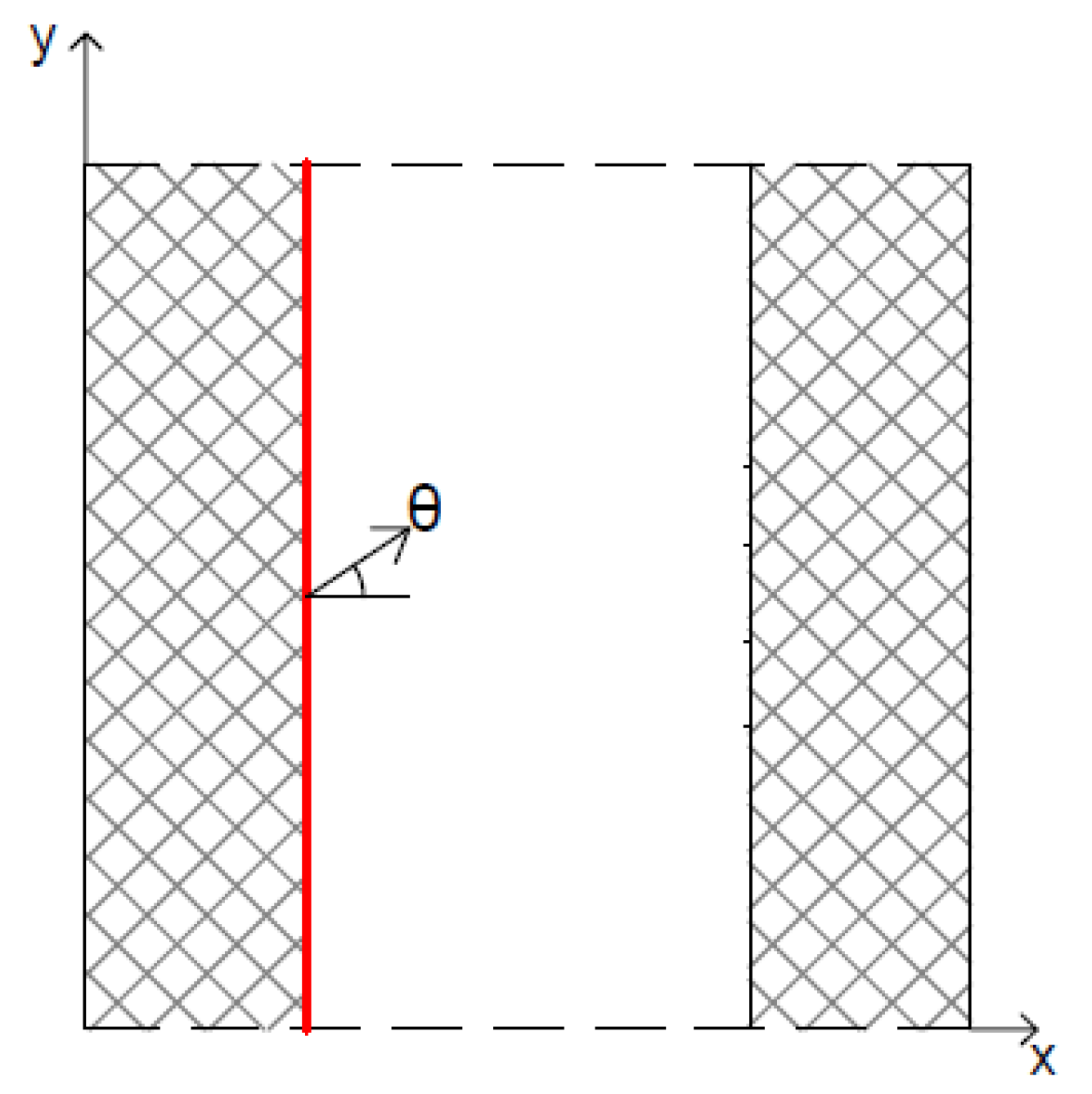
Figure 1 shows the schematics of internal wave generation using a single wave generation line parallel to the y-axis combined with periodic lateral boundaries at the lateral sides of the numerical domain (indicated by dashed lines at the top and bottom part of
Figure 1). The information reaching one end of the domain enters the opposite end.
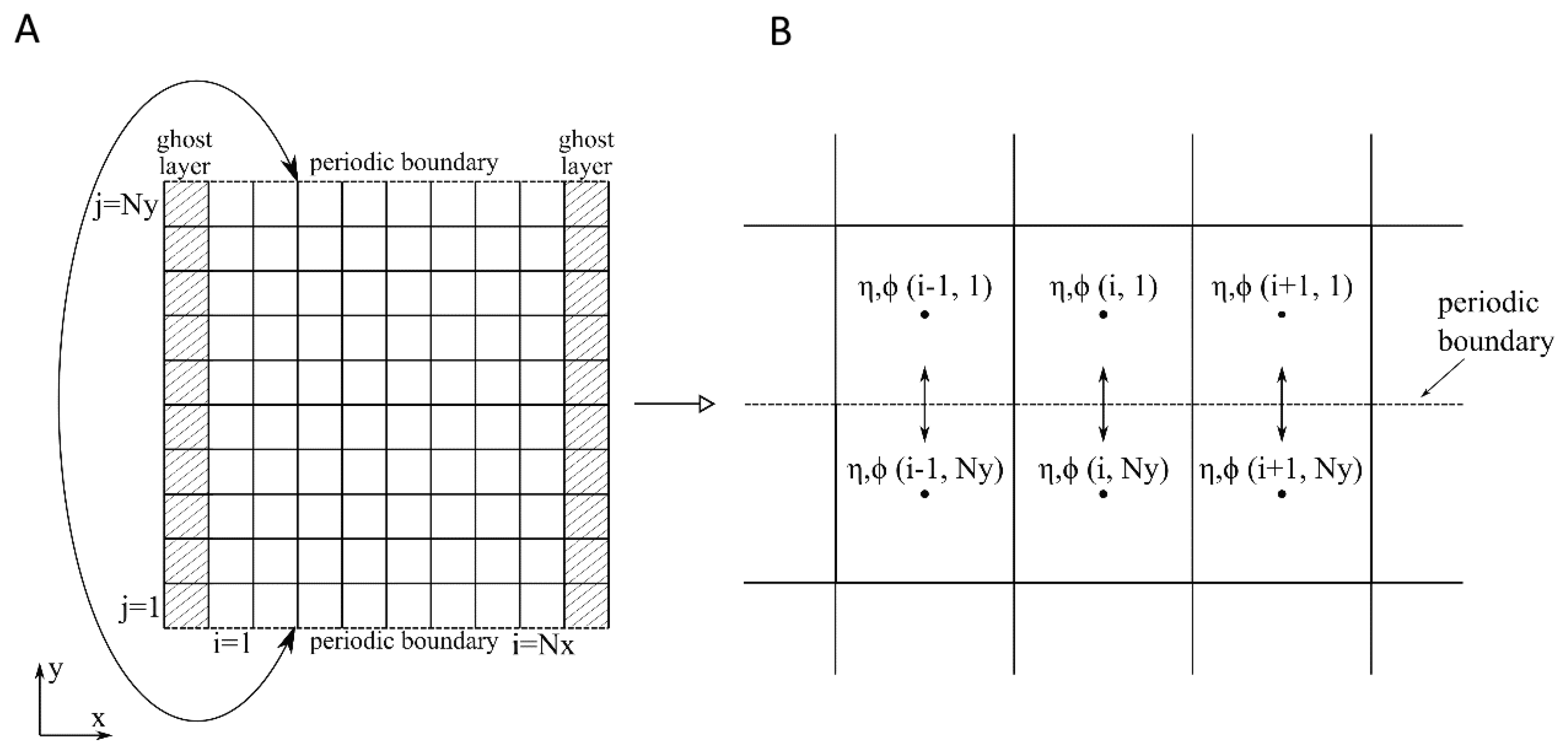
Figure 2 shows a schematic of the periodic lateral boundaries implementation. A layer of additional grid cells is present next to each vertical boundary, acting as fully reflective walls while the periodic boundaries are represented by dashed lines in the x-axis direction (
Figure 2A). At the position of the periodic boundaries, Equations (
1) and (
2) are solved as if the horizontal boundaries were next to each other (
Figure 2B). The bathymetry close to both lateral boundaries has to be identical between each other to ensure continuity.
2.3. The Wave-Structure Interaction Solver, NEMOH
The wave-structure interaction solver employed to solve the diffraction/radiation problem and deliver the perturbed wave field around the floating WEC is the open-source potential flow BEM solver NEMOH, developed at Ecole Centrale de Nantes [
33]. NEMOH is based on linear potential flow theory [
34], and employs the following assumptions:
The flow is inviscid.
The flow is irrotational.
The fluid is incompressible.
The motion amplitudes of the modelled floating bodies are much smaller than the wavelength.
The sea bottom is flat.
Under these conditions the water velocity,
, can be expressed in terms of the velocity potential,
, according to:
Linear potential flow theory has hitherto been used in most of the investigations into WEC array modelling, for example see [
17,
26,
35,
36]. Due to the principle of superposition, linear potential theory allows for the separation of the total wave field into the following components of the wave velocity potential:
where
is the total wave velocity potential,
is the incident wave velocity potential,
is the diffracted wave velocity potential and
is the sum of the radiated wave velocity potentials for each degree of freedom (DOF) of motion of the structure(s).
2.4. Generation of the Incident Wave Field
The incident wave field is calculated using the wave propagation model MILDwave in the time-domain. It is possible to simulate regular waves, and long-crested and short-crested irregular waves in MILDwave. However, for the coupled model it is not possible to perform a direct calculation of irregular waves using a one-way coupling. This is because it is necessary to ensure the correct matching between each incident and perturbed wave regular component. Consequently, in this section details are provided on obtaining the incident regular waves and correctly calculating the irregular waves as a superposition of different linear regular wave components.
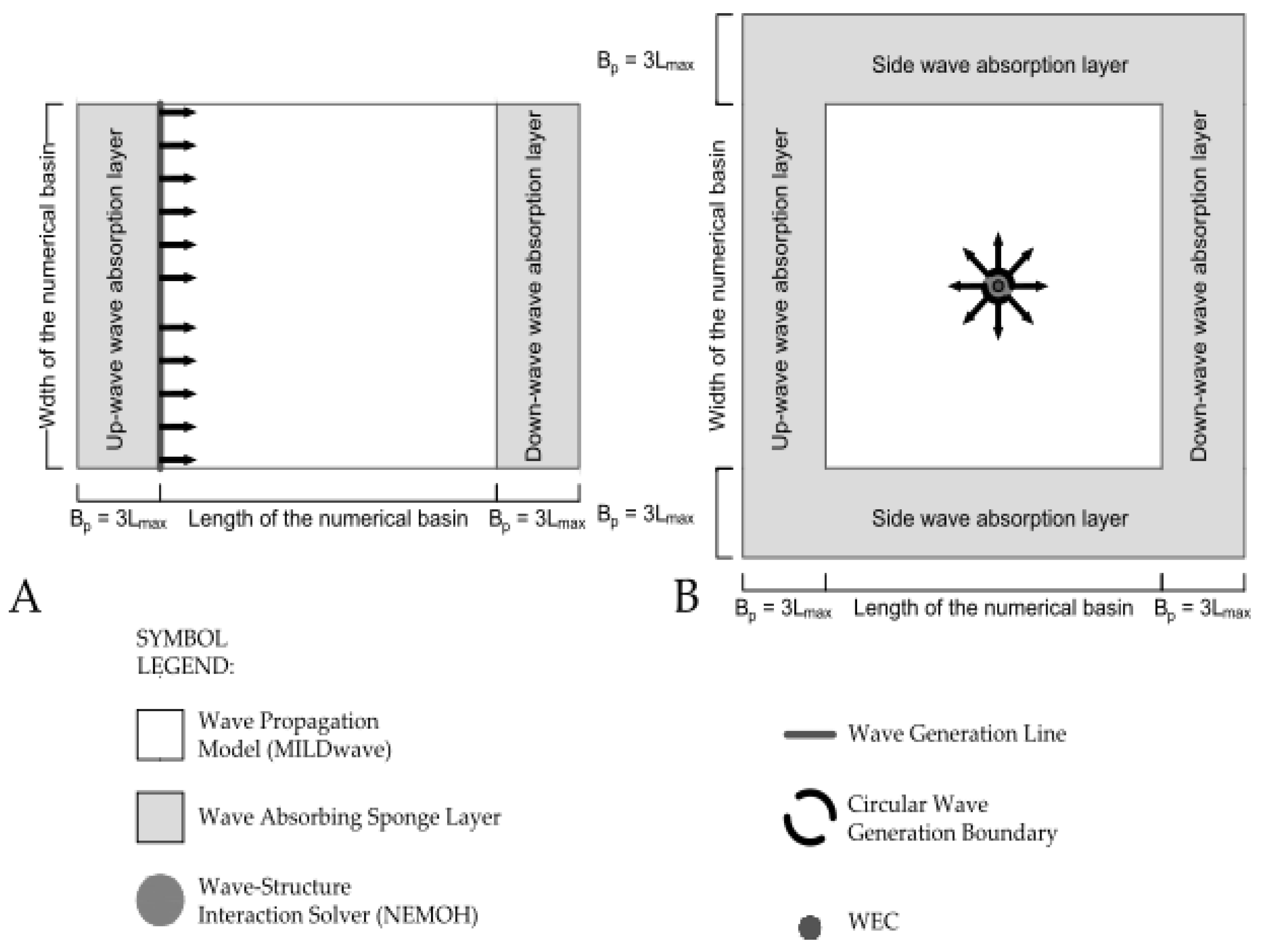
The incident wave field for a linear regular wave is generated intrinsically in MILDwave. The numerical set-up of MILDwave is illustrated in
Figure 3A. Waves are generated along a linear offshore wave generation boundary (e.g., as illustrated in
Figure 1) by applying the boundary condition of linear regular waves’ generation:
where
is the incident regular wave surface elevation and
a is the wave amplitude. To minimize unwanted wave reflection, absorption layers are placed downwave and up-wave in the numerical wave basin.
By applying the superposition principle, a first order irregular wave is represented as the finite sum of
regular wave components characterized by their wave amplitude,
, and wave period,
, derived from the wave spectral density,
:
where
where
is the incident irregular wave surface elevation and
is the wave amplitude,
is the wave angular frequency,
is the wave frequency,
is the wave number,
is the wave direction and
is the incident phase angle, of each wave frequency component
j.
is selected randomly between
and
to avoid local attenuation of
.
To generate a long-crested irregular wave,
is equal to the mean direction of wave propagation,
, for all wave frequency components. In the case of short-crested waves the wave directions,
, introduced in Equation (
7) are obtained for each frequency using periodic boundaries and the Sand and Myneet [
37] method.
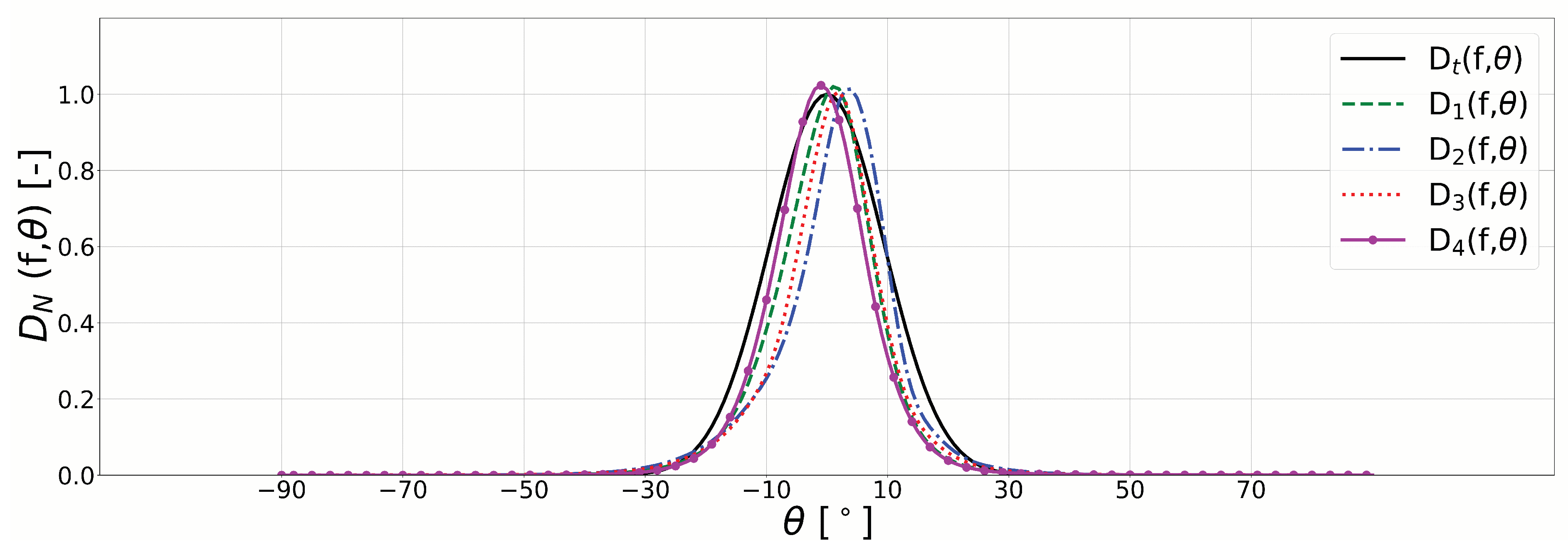
According to this method, the wave spectrum is discretized in
frequency components. The wave propagation angles
are selected randomly according to the cumulative distribution function of the directional spreading function,
, and are assigned to each wave frequency component. This model provides an accurate representation of the targeted spreading function shape as shown in [
32]. The spreading function of Frigaard [
38] is employed:
with,
where
is the directional spreading parameter,
is the Gamma function.
Hence, the values of
can be determined for different directional spreading, given by:
where
is the standard deviation of the directional spreading.
2.5. Calculation of the Perturbed Wave Field
The perturbed wave field in the time-domain for a regular wave is obtained in two steps and the employed numerical set-up is illustrated in
Figure 3B. First, a frequency-dependent simulation is performed using NEMOH to obtain the complex perturbed wave field around the (group of) structure(s). NEMOH resolves the wave frequency-dependent wave radiation problem for each (of the) structure(s) and the diffraction (including radiation) over a predetermined numerical grid with the wave phase angle
at the center of the domain. The resulting radiated and diffracted wave fields for each frequency,
, depend on the shape and number of floating structure(s), the number of DOF considered, the local constant water depth and the wave period.
NEMOH provides the complex radiated wave field as a summation of the radiated wave field for each floating structure. The diffracted wave field is given for all structures. Equations (
12) and (
13) describe the complex radiated and diffracted wave fields, respectively:
where
is the radiated wave field,
is the diffracted wave field,
i is the imaginary number part,
and
correspond to the radiated and diffracted wave phase angle, respectively,
J is the total number of floating WECs and
is the Response Amplitude Operator (RAO) for one DOF of the
J WECs given by:
here
is the excitation force vector of the J WECs,
is the WEC’s mass matrix,
is the added mass matrix,
is the hydrodynamic damping coefficient matrix,
is the Power Take-Off (PTO) damping coefficient matrix and
is the hydrodynamic stiffness matrix.
The radiated and diffracted complex wave fields are added to obtain the perturbed wave field,
:
Secondly, the perturbed wave field is transformed from the frequency-domain to the time-domain and imposed into MILDwave using an internal circular (or in other cases rectangular) wave generation boundary (
Figure 3B). To ensure phase matching between the incident and perturbed wave fields, the phase angle obtained from NEMOH has to be corrected with the phase angle of the incident regular wave in the center of the internal wave generation boundary. Waves are forced away from the wave generation boundary by imposing values of free surface elevation
as described by Equation (
16):
where
is the wave surface elevation at the internal wave generation boundary,
is the perturbed complex wave field from the frequency-domain,
and
are the wave amplitude and the wave phase angle of the incident wave at the location of the internal wave generation boundary, respectively.
is the phase angle of the perturbed wave at the internal wave generation boundary,
c. To avoid unwanted wave reflection, wave absorption layers or relaxation zones are implemented up-wave, downwave and in the sides of the MILDwave numerical domain (
Figure 3B).
As in the case for the calculation of the irregular incident wave field, the irregular perturbed wave field is calculated as the finite sum of
N regular perturbed wave components characterized at the center of the wave generation boundary by their wave amplitude,
, derived from the wave spectrum:
where
and
is the perturbed irregular wave surface elevation where
is the spectral density, and
is the incident phase angle and
is the perturbed phase angle in NEMOH of each frequency component at the internal wave generation boundary,
c.
is selected randomly between
and
to avoid local attenuation of the wave surface elevation.
This methodology for calculating irregular waves is valid both for long-crested and short-crested waves. The phase angle of the perturbed wave obtained in NEMOH is dependent on the incident wave direction of each wave frequency. Thus, the wave direction of each frequency is implicitly considered when prescribing the internal wave generation boundary and forcing away the perturbed wave field. In the case of long-crested waves it corresponds with the mean direction, while in the case of short-crested waves each direction corresponds with the random direction assigned to each regular wave component.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}