Multistep Flood Inundation Forecasts with Resilient Backpropagation Neural Networks: Kulmbach Case Study



Abstract
1. Introduction
2. Methods
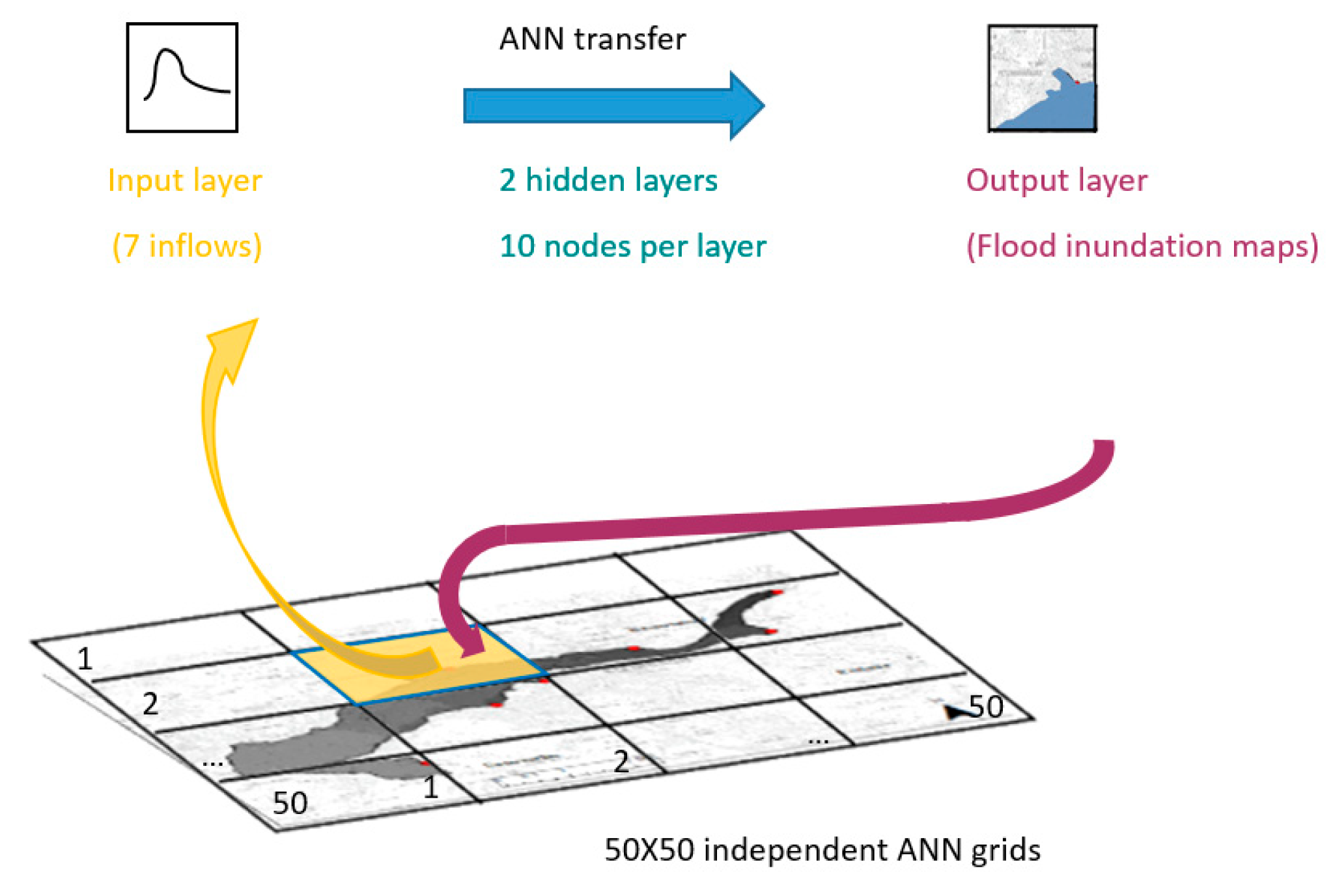
2.1. Data and Structure of Artificial Neural Networks
2.2. Hyperparameter Tuning in ANN
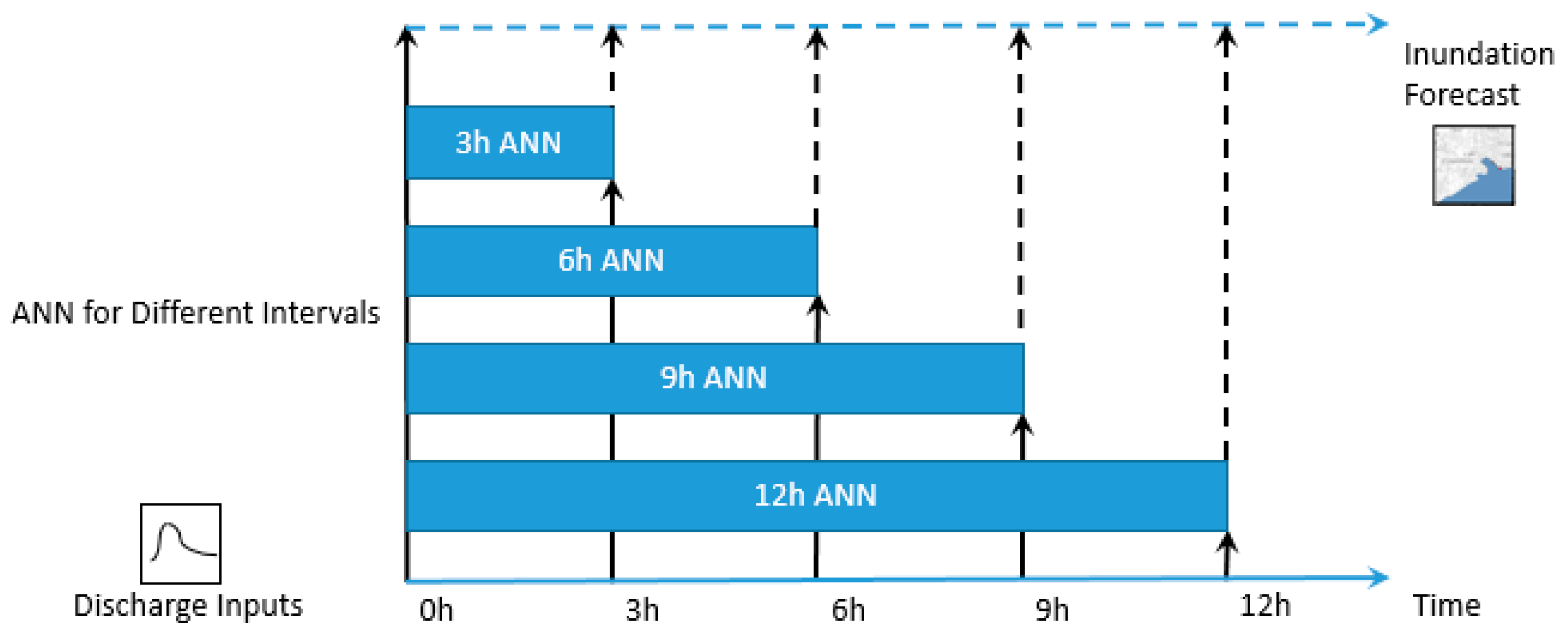
2.3. Prediction of the First Interval of Flood Events
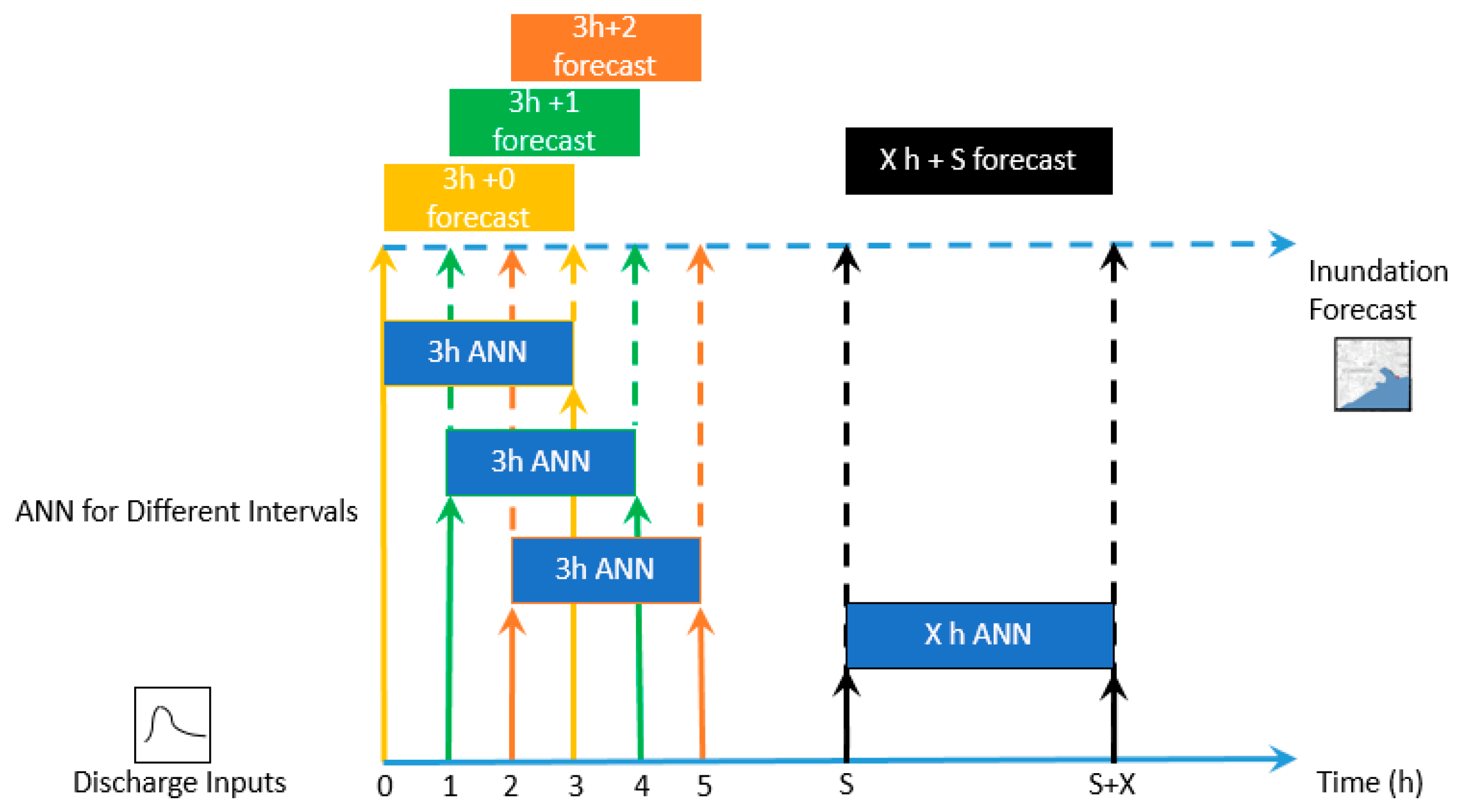
2.4. Real-Time Forecasting for Sequential Multistep Forecast Intervals
2.5. Model Evaluation
- T is the predicted value, water depth from the ANN model in our case.
- S is the observed value, water depth from the hydraulic model (HEC-RAS) in our case.
- To assess the general conduct of the model over the training and validation dataset, the average RMSE is also calculated for the average accuracy among all the events in the testing dataset.
3. Study Area and Database
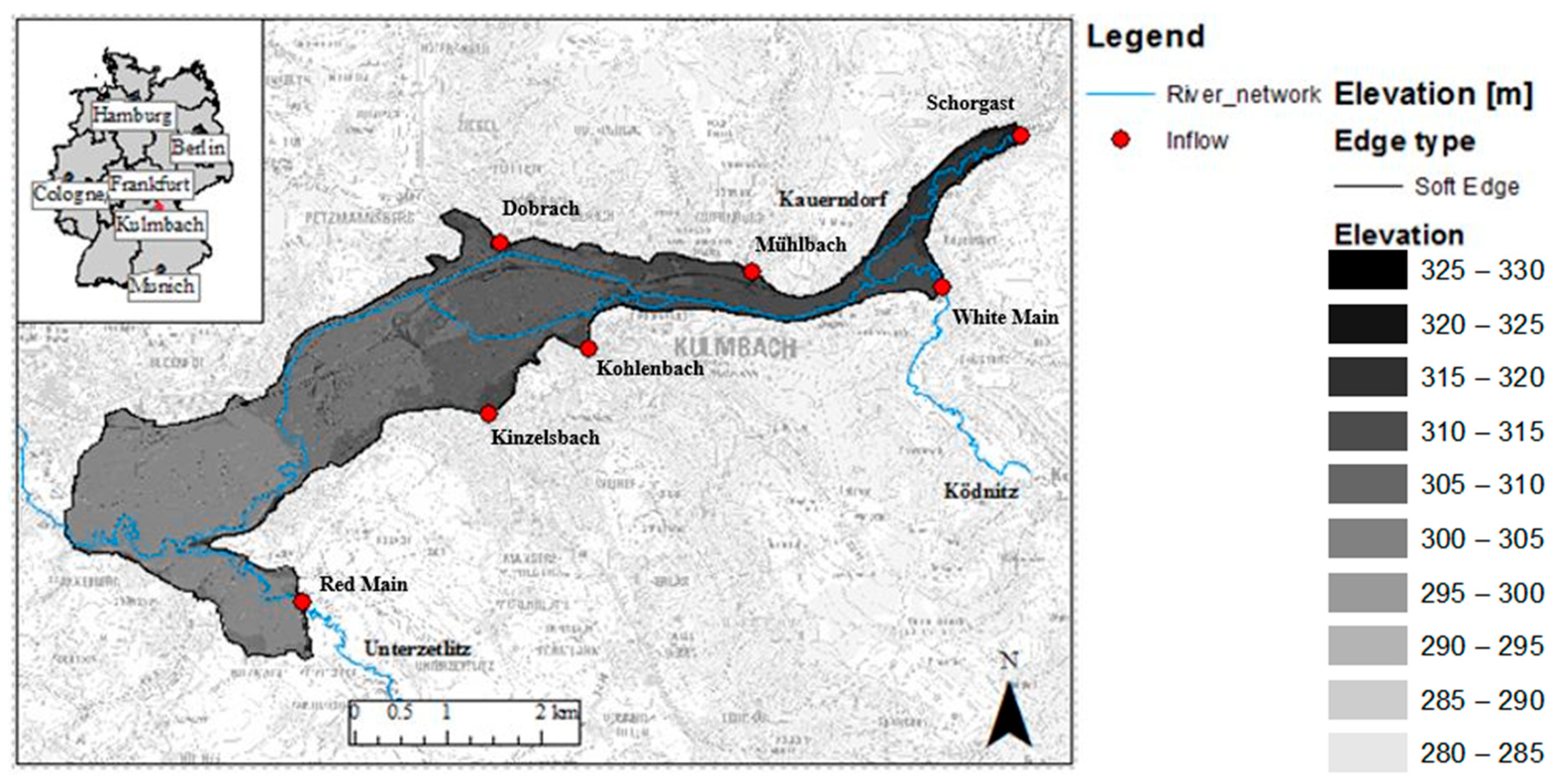
3.1. Study Area
3.2. HEC-RAS and Synthetic Event Database
4. Results
4.1. Assessment of the Prediction of Water Depths of the First Intervals (time 0) of Flood Events
4.1.1. Synthetic Flood Events
4.1.2. Historical Flood Events
Historical flood events 2006
Historical flood events 2013
Historical flood events 2005
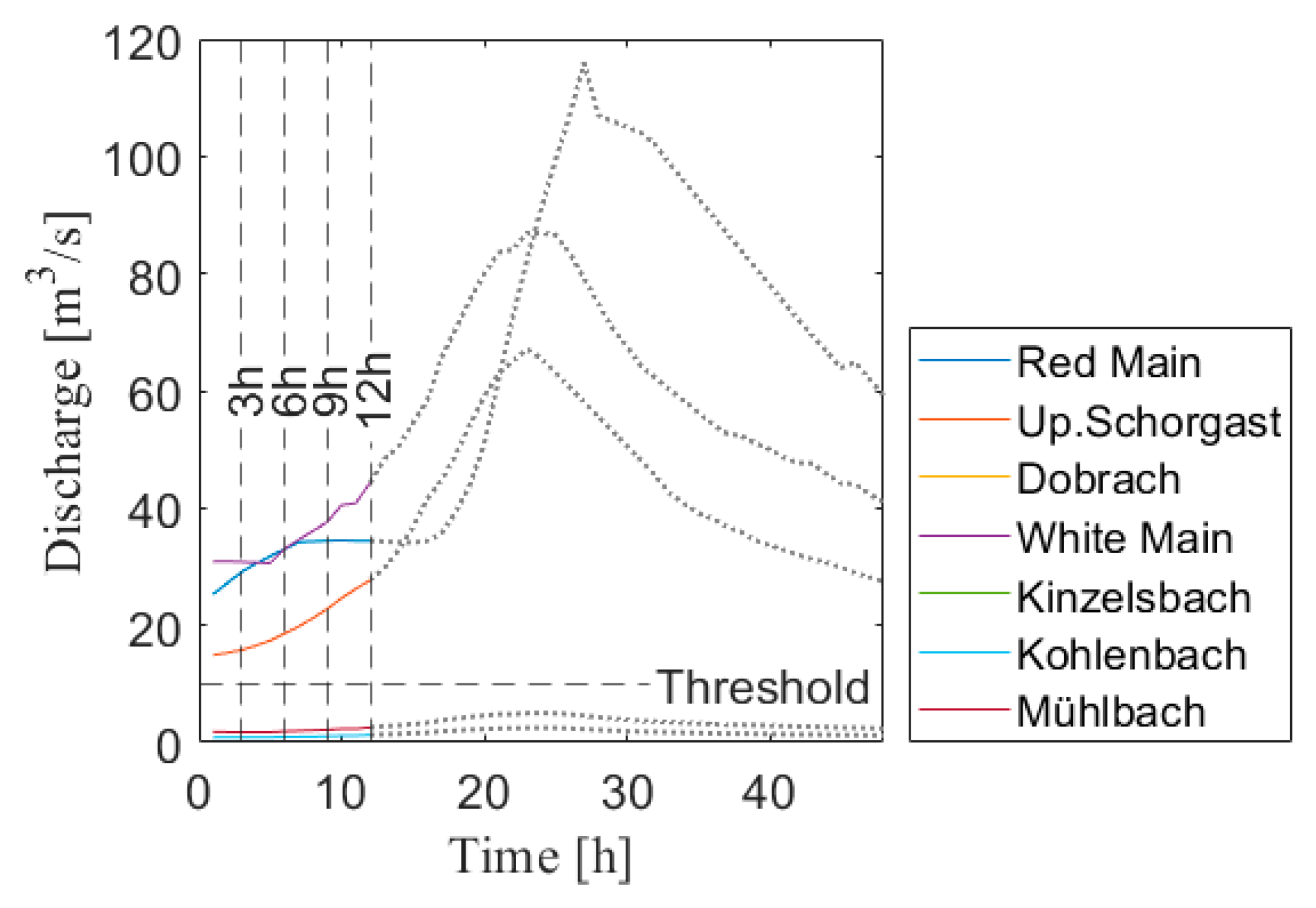
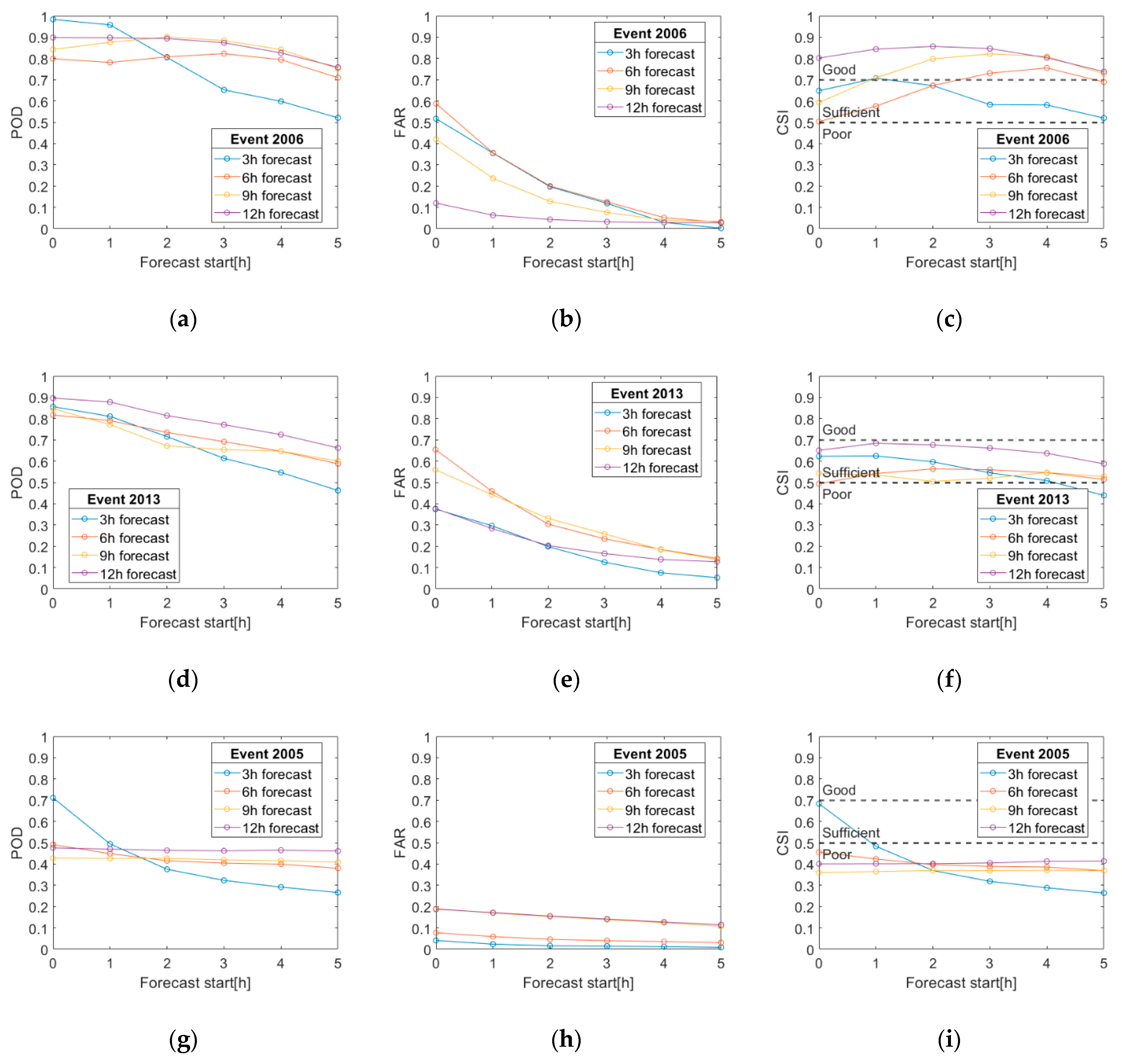
4.2. Assessment of Real-time Forecasting of Water Depths for Multistep Flood Forecast Intervals, 1–5 h
Historical flood events 2006
Historical flood events 2013
Historical flood event 2005
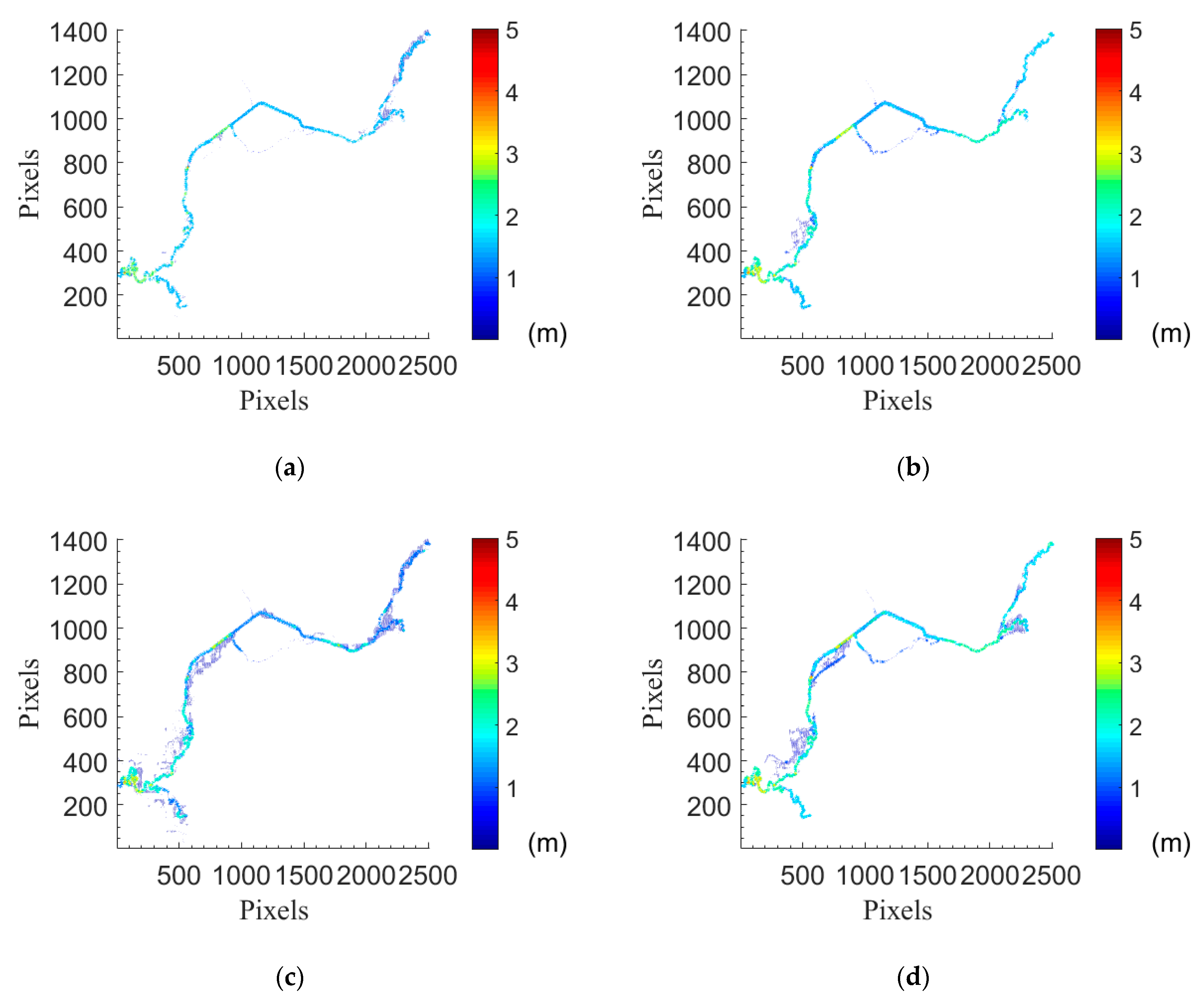
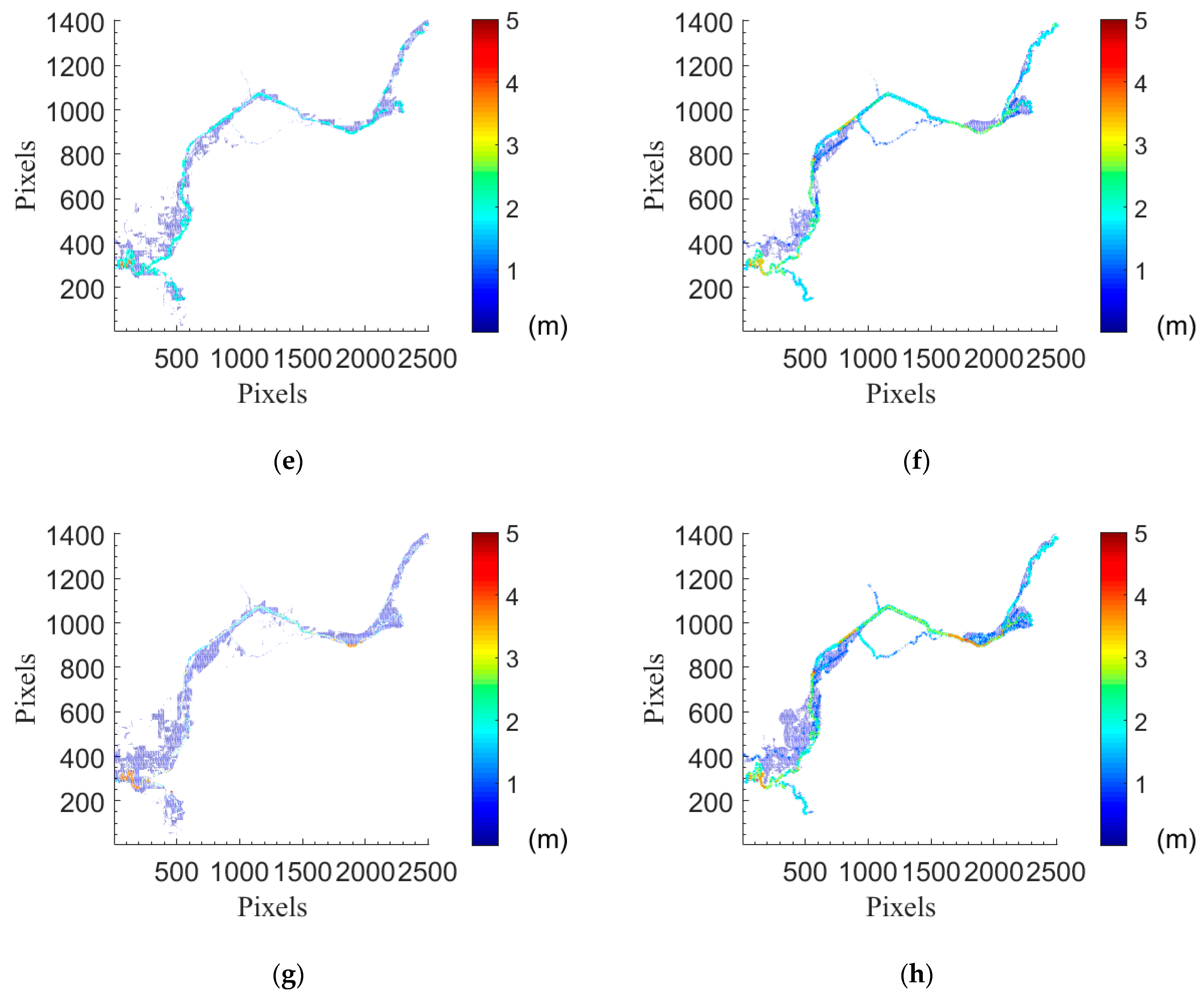
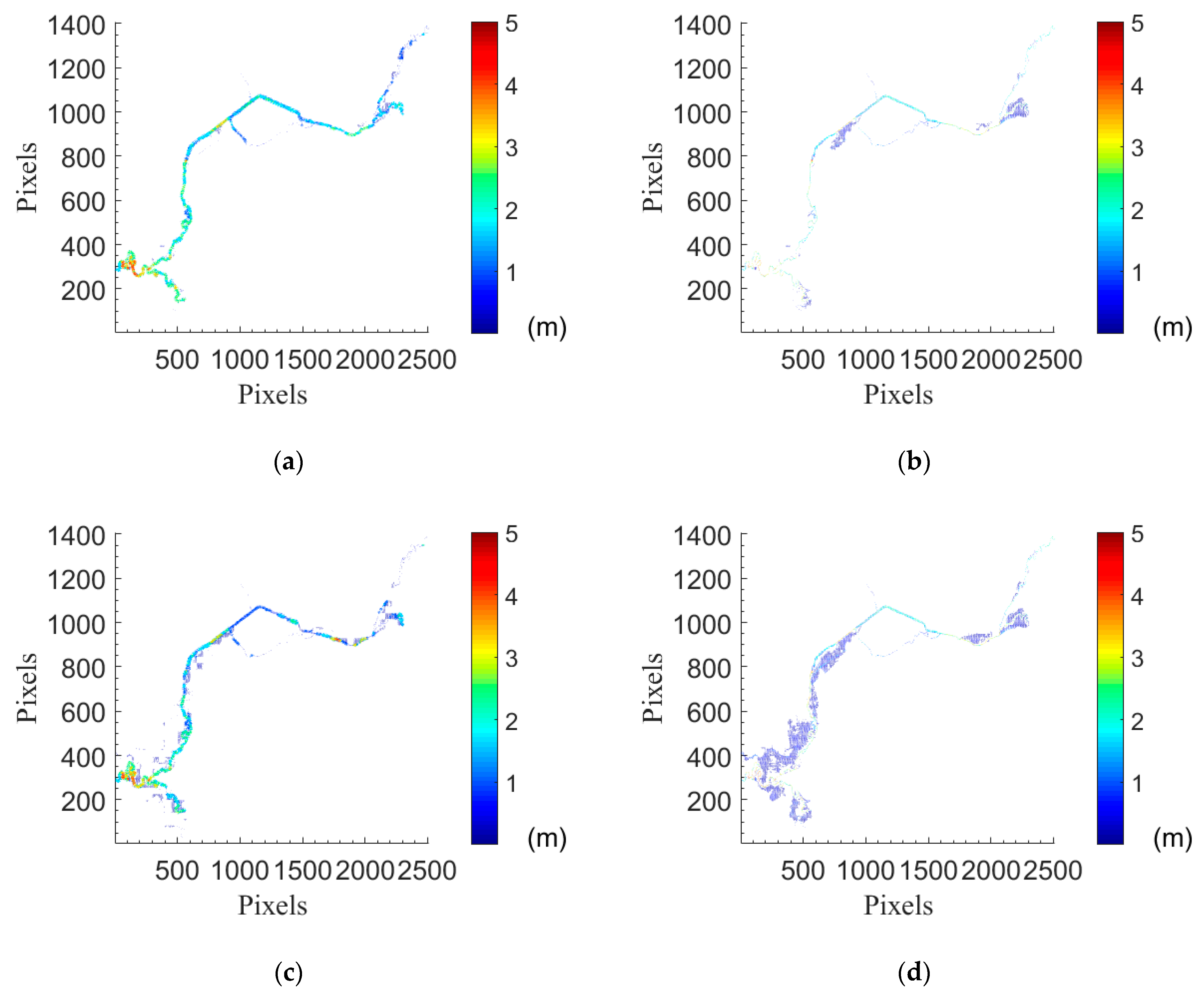
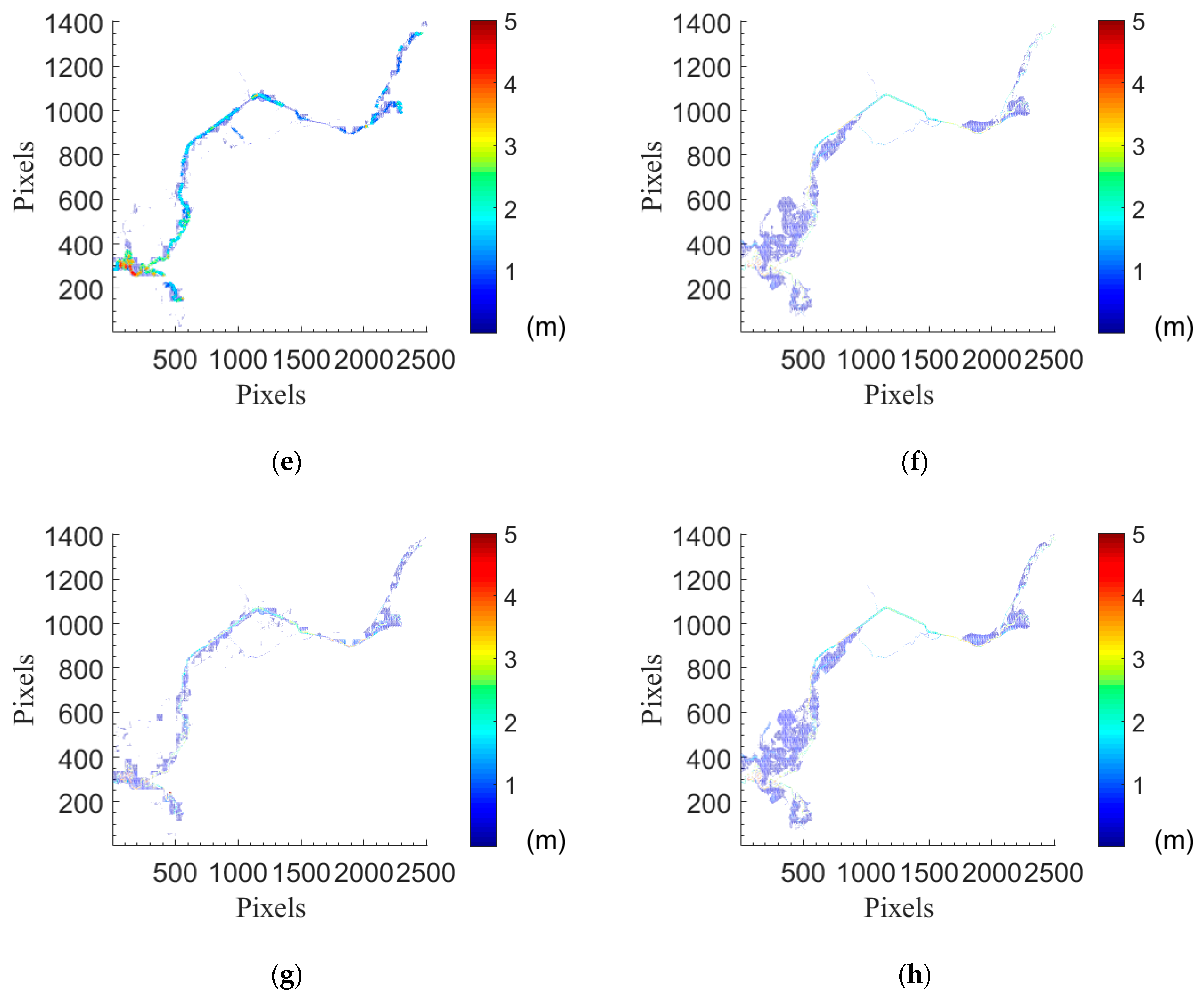
4.3. Forecast of the Inundation Extent
5. Discussion
5.1. Assessment of the Prediction of Water Depths of the First Intervals of Flood Events
5.1.1. Synthetic Flood Events
5.1.2. Historical Flood Events
Historical flood event 2006
Historical flood event 2013
Historical flood event 2005
5.2. Assessment of Real-time Forecasting of Water Depths for Multistep Flood Forecast Intervals, 1–5 h
Historical flood event 2006
Historical flood event 2013
Historical flood event 2005
5.3. Forecast of the Inundation Extent
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Berz, G. Flood disasters: Lessons from the past-worries for the future. Water Manag. 2001, 148, 57–58. [Google Scholar] [CrossRef]
- Chang, L.C.; Amin, M.Z.M.; Yang, S.N.; Chang, F.J. Building ANN-based regional multi-step-ahead flood inundation forecast models. Water 2018, 10, 1283. [Google Scholar] [CrossRef]
- Henonin, J.; Russo, B.; Mark, O.; Gourbesville, P. Real-time urban flood forecasting and modelling—A state of the art. J. Hydroinform. 2013, 15, 717–736. [Google Scholar] [CrossRef]
- Hankin, B.; Waller, S.; Astle, G.; Kellagher, R. Mapping space for water: Screening for urban flash flooding. J. Flood Risk Manag. 2008, 1, 13–22. [Google Scholar] [CrossRef]
- Kalyanapu, A.J.; Shankar, S.; Pardyjak, E.R.; Judi, D.R.; Burian, S.J. Assessment of GPU computational enhancement to a 2D flood model. Environ. Model. Softw. 2011, 26, 1009–1016. [Google Scholar] [CrossRef]
- Mosavi, A.; Ozturk, P.; Chau, K.W. Flood prediction using machine learning models: Literature review. Water 2018, 10, 1–40. [Google Scholar]
- Dineva, A.; Várkonyi-Kóczy, A.R.; Tar, J.K. Fuzzy expert system for automatic wavelet shrinkage procedure selection for noise suppression. In Proceedings of the INES 2014 IEEE 18th Internationl Conference Intelligent Engineering Systems, Tihany, Hungary, 3–5 July 2014; pp. 163–168. [Google Scholar]
- Bermúdez, M.; Cea, L.; Puertas, J. A rapid flood inundation model for hazard mapping based on least squares support vector machine regression. J. Flood Risk Manag. 2019, 12, 1–14. [Google Scholar] [CrossRef]
- Gizaw, M.S.; Gan, T.Y. Regional Flood Frequency Analysis using Support Vector Regression under historical and future climate. J. Hydrol. 2016, 538, 387–398. [Google Scholar]
- Taherei Ghazvinei, P.; Darvishi, H.H.; Mosavi, A.; Bin Wan Yusof, K.; Alizamir, M.; Shamshirband, S.; Chau, K.W. Sugarcane growth prediction based on meteorological parameters using extreme learning machine and artificial neural network. Eng. Appl. Comput. Fluid Mech. 2018, 12, 738–749. [Google Scholar] [CrossRef]
- Noymanee, J.; Nikitin, N.O.; Kalyuzhnaya, A.V. Urban Pluvial Flood Forecasting using Open Data with Machine Learning Techniques in Pattani Basin. Procedia Comput. Sci. 2017, 119, 288–297. [Google Scholar] [CrossRef]
- Kasiviswanathan, K.S.; He, J.; Sudheer, K.P.; Tay, J.H. Potential application of wavelet neural network ensemble to forecast streamflow for flood management. J. Hydrol. 2016, 536, 161–173. [Google Scholar] [CrossRef]
- Zhang, G.P. Avoiding pitfalls in neural network research. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 3–16. [Google Scholar] [CrossRef]
- Dawson, C.W.; Wilby, R.L. Hydrological modelling using artificial neural networks. Prog. Phys. Geogr. 2001, 25, 80–108. [Google Scholar] [CrossRef]
- Yu, P.S.; Chen, S.T.; Chang, I.F. Support vector regression for real-time flood stage forecasting. J. Hydrol. 2006, 328, 704–716. [Google Scholar]
- Sit, M.; Demir, I. Decentralized flood forecasting using deep neural networks. arXiv 2019, arXiv:1902.02308. [Google Scholar]
- Bustami, R.; Bessaih, N.; Bong, C.; Suhaili, S. Artificial neural network for precipitation and water level predictions of bedup River. IAENG Int. J. Comput. Sci. 2007, 34, 228–233. [Google Scholar]
- French, J.; Mawdsley, R.; Fujiyama, T.; Achuthan, K. Combining machine learning with computational hydrodynamics for prediction of tidal surge inundation at estuarine ports. Procedia IUTAM 2017, 25, 28–35. [Google Scholar] [CrossRef]
- Berkhahn, S.; Fuchs, L.; Neuweiler, I. An ensemble neural network model for real-time prediction of urban floods. J. Hydrol. 2019, 575, 743–754. [Google Scholar] [CrossRef]
- Lin, Q.; Leandro, J.; Wu, W.; Bhola, P.; Disse, M. Prediction of Maximum Flood Inundation Extents with Resilient Backpropagation Neural Network: Case Study of Kulmbach. Front. Earth Sci. 2020, 8, 1–8. [Google Scholar]
- Shen, H.-Y.; Chang, L.-C. On-line multistep-ahead inundation depth forecasts by recurrent NARX networks. Hydrol. Earth Syst. Sci. Discuss. 2012, 9, 11999–12028. [Google Scholar] [CrossRef]
- Sit, M.; Demiray, B.Z.; Xiang, Z.; Ewing, G.J.; Sermet, Y.; Demir, I. A comprehensive review of deep learning applications in hydrology and water resources. Water Sci. Technol. 2020. [Google Scholar] [CrossRef]
- Nawi, N.; Ransing, R.; Ransing, M. An improved Conjugate Gradient based learning algorithm for back propagation neural networks. Int. J. Comput. Intell. 2007, 4, 46–55. [Google Scholar]
- Sankaranarayanan, S.; Prabhakar, M.; Satish, S.; Jain, P.; Ramprasad, A.; Krishnan, A. Flood prediction based on weather parameters using deep learning. J. Water Clim. Chang. 2019, 1–18. [Google Scholar] [CrossRef]
- Kohavi, R. A study of cross-validation and bootstrap for accuracy estimation and model selection. In Proceedings of the Appears in the International Joint Conference on Articial Intelligence (IJCAI), Stanford, CA, USA, 19 August 1995; Volume 8. [Google Scholar]
- Jhong, Y.D.; Chen, C.S.; Lin, H.P.; Chen, S.T. Physical hybrid neural network model to forecast typhoon floods. Water 2018, 10, 632. [Google Scholar] [CrossRef]
- Wang, H.; Rahnamayan, S.; Wu, Z. Parallel differential evolution with self-adapting control parameters and generalized opposition-based learning for solving high-dimensional optimization problems. J. Parallel Distrib. Comput. 2013, 73, 62–73. [Google Scholar] [CrossRef]
- Kabir, S.; Patidar, S.; Xia, X.; Liang, Q.; Neal, J.; Pender, G. A deep convolutional neural network model for rapid prediction of fluvial flood inundation. J. Hydrol. 2020, 590, 125481. [Google Scholar] [CrossRef]
- Saini, L.M. Peak load forecasting using Bayesian regularization, Resilient and adaptive backpropagation learning based artificial neural networks. Electr. Power Syst. Res. 2008, 78, 1302–1310. [Google Scholar] [CrossRef]
- Panda, R.K.; Pramanik, N.; Bala, B. Simulation of river stage using artificial neural network and MIKE 11 hydrodynamic model. Comput. Geosci. 2010, 36, 735–745. [Google Scholar] [CrossRef]
- Bhola, P.K.; Leandro, J.; Disse, M. Framework for offline flood inundation forecasts for two-dimensional hydrodynamic models. Geosciences 2018, 8, 346. [Google Scholar] [CrossRef]
- Bhola, P.K.; Nair, B.B.; Leandro, J.; Rao, S.N.; Disse, M. Flood inundation forecasts using validation data generated with the assistance of computer vision. J. Hydroinform. 2019, 21, 240–256. [Google Scholar] [CrossRef]
- Li, L.; Hong, Y.; Wang, J.; Adler, R.F.; Policelli, F.S.; Habib, S.; Irwn, D.; Korme, T.; Okello, L. Evaluation of the real-time TRMM-based multi-satellite precipitation analysis for an operational flood prediction system in Nzoia Basin, Lake Victoria, Africa. Nat. Hazards 2009, 50, 109–123. [Google Scholar] [CrossRef]
- Ludwig, K. The Water Balance Model LARSIM: Design, Content and Applications, Freiburger Schriften zur Hydrologie. Master’s Thesis, Institut für Hydrologie der University, Hannover, Germany, 2006. [Google Scholar]
- Hochwassernachrichtendienst Bayern, added level data (MQ) from water level Ködnitz/White Main. Available online: www.hnd.bayern.de (accessed on 12 December 2019).
- Bernhofen, M.V.; Whyman, C.; Trigg, M.A.; Sleigh, P.A.; Smith, A.M.; Sampson, C.C.; Yamazaki, D.; Ward, P.J.; Rudari, R.; Pappenberger, F.; et al. A first collective validation of global fluvial flood models for major floods in Nigeria and Mozambique. Environ. Res. Lett. 2018, 13. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Prediction Time (h) | Wet ANN Grid | ANN Grid with Average RMSE > 0.2 m | ANN Grid% with Average RMSE ≤ 0.2 m | ANN Grid with Average RMSE > 0.3 m | ANN Grid% with Average RMSE ≤ 0.3 m | ANN Grid with Average RMSE > 0.4 m | ANN Grid% with Average RMSE ≤ 0.4 m |
|---|---|---|---|---|---|---|---|
| 3 | 300 | 47 | 84.33% | 18 | 94.00% | 10 | 96.67% |
| 6 | 417 | 174 | 58.27% | 78 | 81.29% | 27 | 93.53% |
| 9 | 474 | 106 | 77.64% | 37 | 92.19% | 15 | 96.84% |
| 12 | 483 | 50 | 89.65% | 12 | 97.52% | 7 | 98.55% |
| Prediction Time (h) | Wet ANN Grid | ANN Grid with RMSE > 0.2 m | ANN Grid% with RMSE ≤ 0.2 m | ANN Grid with RMSE > 0.3 m | ANN Grid% with RMSE ≤ 0.3 m | ANN Grid with RMSE > 0.4 m | ANN Grid% with RMSE ≤ 0.4 m |
|---|---|---|---|---|---|---|---|
| 3 | 280 | 46 | 83.57% | 20 | 92.86% | 6 | 97.86% |
| 6 | 405 | 84 | 79.26% | 42 | 89.63% | 25 | 93.83% |
| 9 | 474 | 134 | 71.73% | 64 | 86.50% | 36 | 92.41% |
| 12 | 483 | 157 | 67.49% | 85 | 82.40% | 47 | 90.27% |
| Prediction Time (h) | Wet ANN Grid | ANN Grid with RMSE > 0.2 m | ANN Grid% with RMSE ≤ 0.2 m | ANN Grid with RMSE > 0.3 m | ANN Grid% with RMSE ≤ 0.3 m | ANN Grid with RMSE > 0.4 m | ANN Grid% with RMSE ≤ 0.4 m |
|---|---|---|---|---|---|---|---|
| 3 | 285 | 9 | 96.84% | 2 | 99.30% | 2 | 99.30% |
| 6 | 405 | 72 | 82.22% | 27 | 93.33% | 8 | 98.02% |
| 9 | 474 | 134 | 71.73% | 65 | 86.29% | 25 | 94.73% |
| 12 | 483 | 175 | 63.77% | 104 | 78.47% | 56 | 88.41% |
| Prediction Time (h) | Wet ANN Grid | ANN Grid with RMSE > 0.2 m | ANN Grid% with RMSE ≤ 0.2 m | ANN Grid with RMSE > 0.3 m | ANN Grid% with RMSE ≤ 0.3 m | ANN Grid with RMSE > 0.4 m | ANN Grid% with RMSE ≤ 0.4 m |
|---|---|---|---|---|---|---|---|
| 3 | 280 | 65 | 76.79% | 36 | 87.14% | 19 | 93.21% |
| 6 | 405 | 165 | 59.26% | 115 | 71.60% | 74 | 81.73% |
| 9 | 474 | 216 | 54.43% | 148 | 68.78% | 93 | 80.38% |
| 12 | 483 | 244 | 49.48% | 168 | 65.22% | 107 | 77.85% |
| Starting Point (h) | Prediction Interval (h) | |||
|---|---|---|---|---|
| 3 | 6 | 9 | 12 | |
| +1 | 98.93% | 92.10% | 83.12% | 79.09% |
| +2 | 98.94% | 90.86% | 77.85% | 79.92% |
| +3 | 96.94% | 89.38% | 76.58% | 78.26% |
| +4 | 95.11% | 86.95% | 70.89% | 75.36% |
| +5 | 86.60% | 69.29% | 66.88% | 68.12% |
| Starting Point (h) | Prediction Interval (h) | |||
|---|---|---|---|---|
| 3 | 6 | 9 | 12 | |
| +1 | 99.30% | 92.59% | 84.18% | 72.67% |
| +2 | 98.95% | 89.88% | 78.90% | 70.39% |
| +3 | 96.30% | 89.17% | 75.74% | 67.91% |
| +4 | 94.17% | 82.51% | 68.78% | 67.29% |
| +5 | 91.28% | 77.34% | 66.46% | 66.67% |
| Starting Point (h) | Prediction Interval (h) | |||
|---|---|---|---|---|
| 3 | 6 | 9 | 12 | |
| +1 | 83.74% | 69.95% | 66.89% | 63.15% |
| +2 | 81.67% | 68.23% | 64.77% | 61.70% |
| +3 | 76.31% | 67.00% | 63.08% | 60.25% |
| +4 | 74.85% | 66.50% | 60.97% | 60.25% |
| +5 | 70.97% | 61.08% | 58.65% | 60.25% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Q.; Leandro, J.; Gerber, S.; Disse, M. Multistep Flood Inundation Forecasts with Resilient Backpropagation Neural Networks: Kulmbach Case Study. Water 2020, 12, 3568. https://doi.org/10.3390/w12123568
Lin Q, Leandro J, Gerber S, Disse M. Multistep Flood Inundation Forecasts with Resilient Backpropagation Neural Networks: Kulmbach Case Study. Water. 2020; 12(12):3568. https://doi.org/10.3390/w12123568
Chicago/Turabian StyleLin, Qing, Jorge Leandro, Stefan Gerber, and Markus Disse. 2020. "Multistep Flood Inundation Forecasts with Resilient Backpropagation Neural Networks: Kulmbach Case Study" Water 12, no. 12: 3568. https://doi.org/10.3390/w12123568
APA StyleLin, Q., Leandro, J., Gerber, S., & Disse, M. (2020). Multistep Flood Inundation Forecasts with Resilient Backpropagation Neural Networks: Kulmbach Case Study. Water, 12(12), 3568. https://doi.org/10.3390/w12123568