
3D-CNN-Based Sky Image Feature Extraction for Short-Term Global Horizontal Irradiance Forecasting





Abstract
:1. Introduction
- A 3D CNN model was proposed to extract features from ground-based sky images for short-term GHI forecasting with machine learning algorithms.
- To illustrate the effectiveness of the proposed 3D CNN in feature extraction, a comprehensive comparison study was conducted against existing feature extraction method.
- The proposed method for short-term GHI forecasting with ground-based sky images was verified on a large dataset
2. Methodology
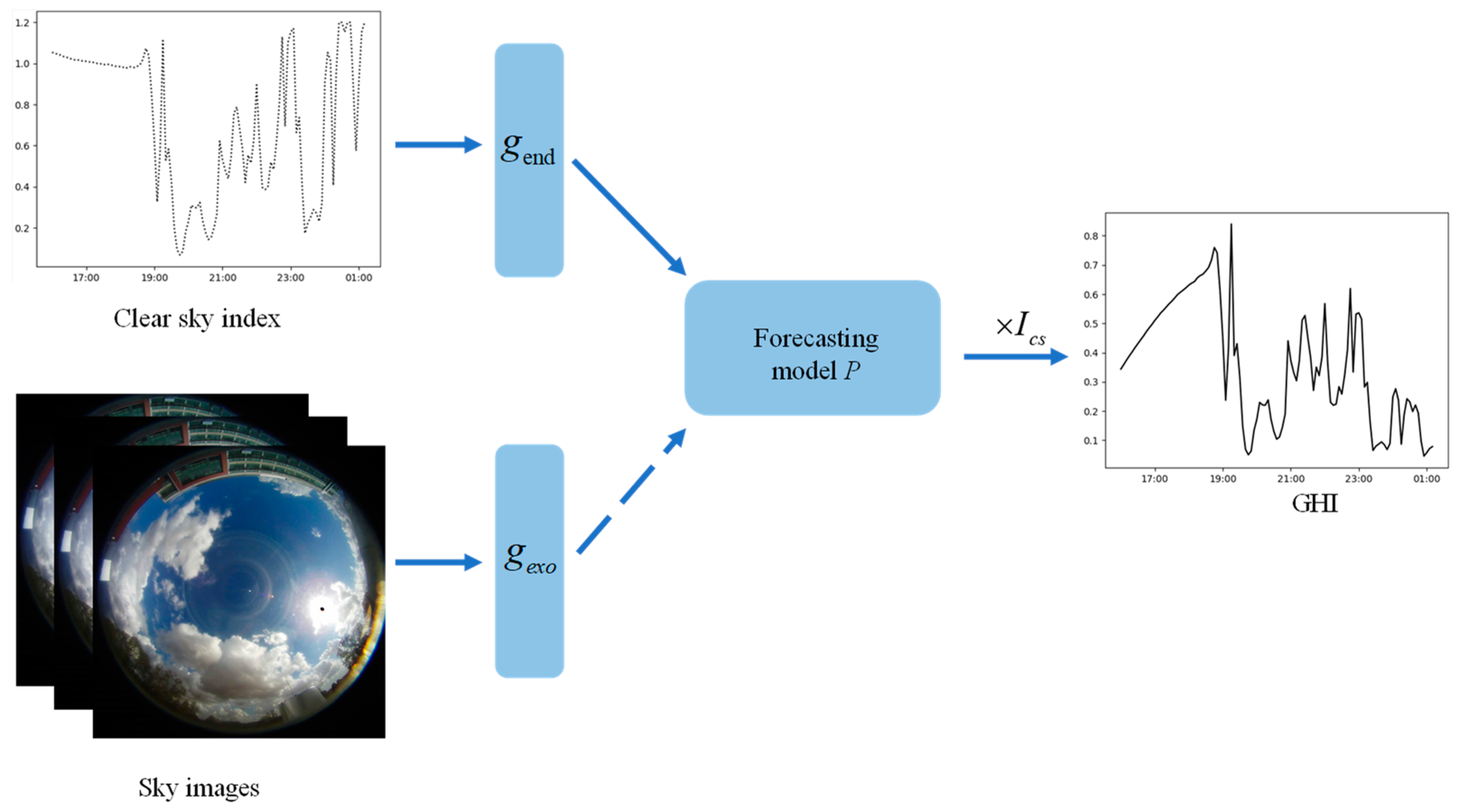
2.1. GHI Forecasting Method
- 1
- The SVM is originally proposed for classification task and has been successfully applied to regression analysis. The key idea for SVM is to map input data into a high-dimension feature space in which the input data can be linearly separated [28]. In this work, Epsilon-support vector regression is introduced as a case study for SVM.
- 2
- ANN is a strong and robust nonlinear method and can model the complex relationship between inputs and outputs. The architecture of ANN consists of several layers and the whole architecture is optimized by backpropagation. The combination of ANN and backpropagation is used to forecast day-ahead solar energy in [29].
- 3
- KNN is based on the similarity of predictors to forecast target value of input data. The similarity is defined by Euclidean distance between train data and input data. The performance of KNN is sensitive to hyper parameters, e.g., the number of nearest neighbors, which are fully explored by an optimization algorithm in [13].
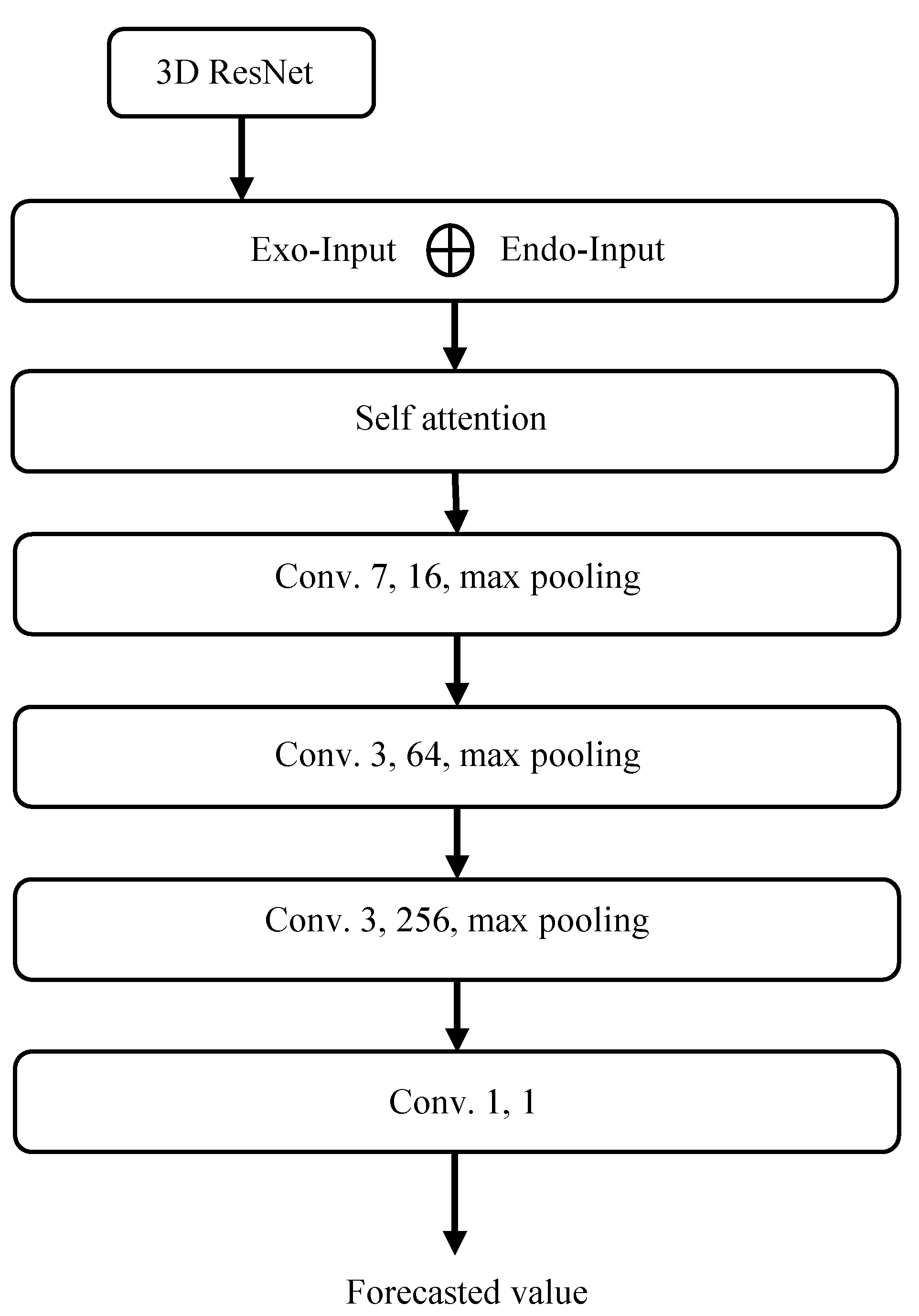
2.2. 3D CNN Model for Feature Extraction
2.3. Forecasting Performance Metric
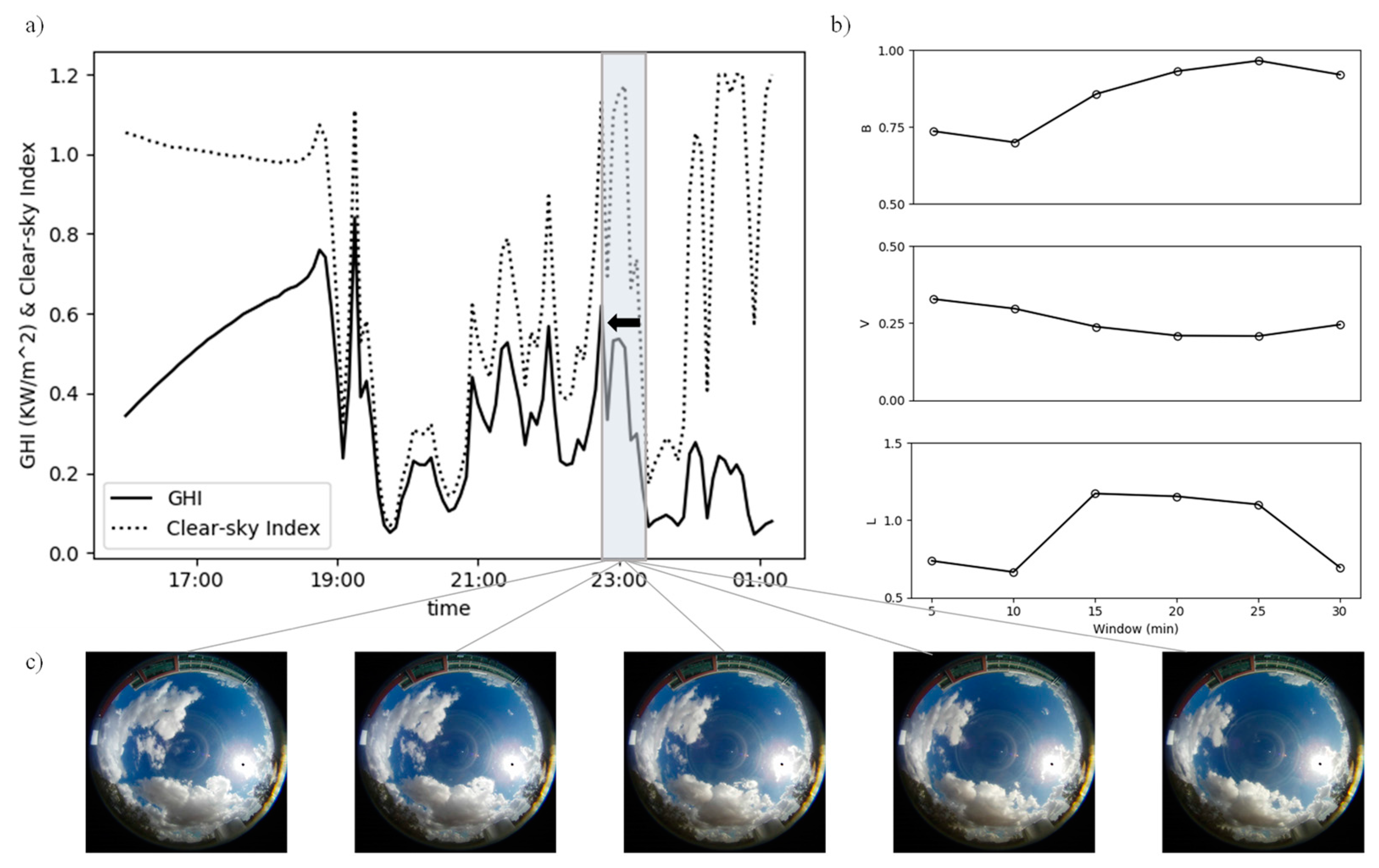
3. Datasets
- 1
- The endogenous features are composed of backward average value, lagged average value, and variability for clear-sky index time series defined in [4]. These values are calculated over the past 30 min in step of 5 min, i.e., a total of 18 values are extracted at issuing time.
- 2
- For exogenous input, the original 1536 × 1536 sky image is cropped into 1080 × 1080 to remove pixels belonging to obstacles around sky, which is further resized to 128 × 128 to reduce cost in computation. Five backward sky images from issuing time are organized in raw format. The missing sky image at aa specific time is replaced by the nearest image. Data samples which lose image for more than 5 min are filtered. After filtering, 93,439 samples are retained for training and 48,366 for testing.
4. Experiment Results
4.1. Short-Term GHI Forecasting with Color Features
- For epsilon-SVM, the regularization parameter is 1.0 and epsilon is 0.1. Radial basis function (RBF) kernel is used and tolerance for stopping criterion is 10-3.
- A four-hidden-layers ANN with neurons {64,64,32,16} is implemented. Activation function is ReLU and optimizer is Adam. Learning rate is 10-4 with adaptive learning decay. For training phase, early stopping strategy is used and 20% training dataset is split for validation.
- The number of nearest neighbors is 40 in KNN. Euclidean distance is used as weight function in prediction, which means closer neighbors have greater influence than neighbors further away.
4.2. 3D ResNet Training
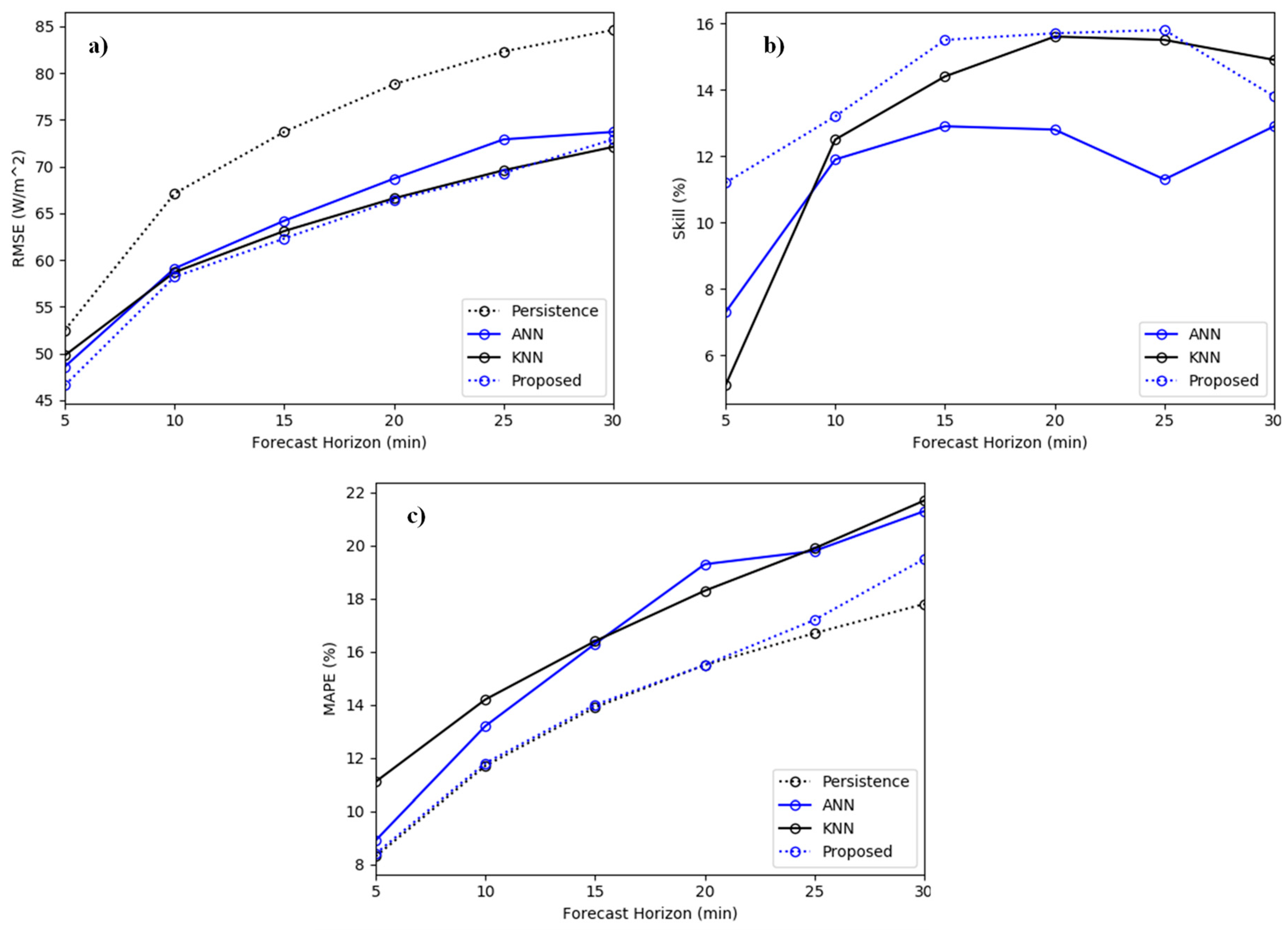
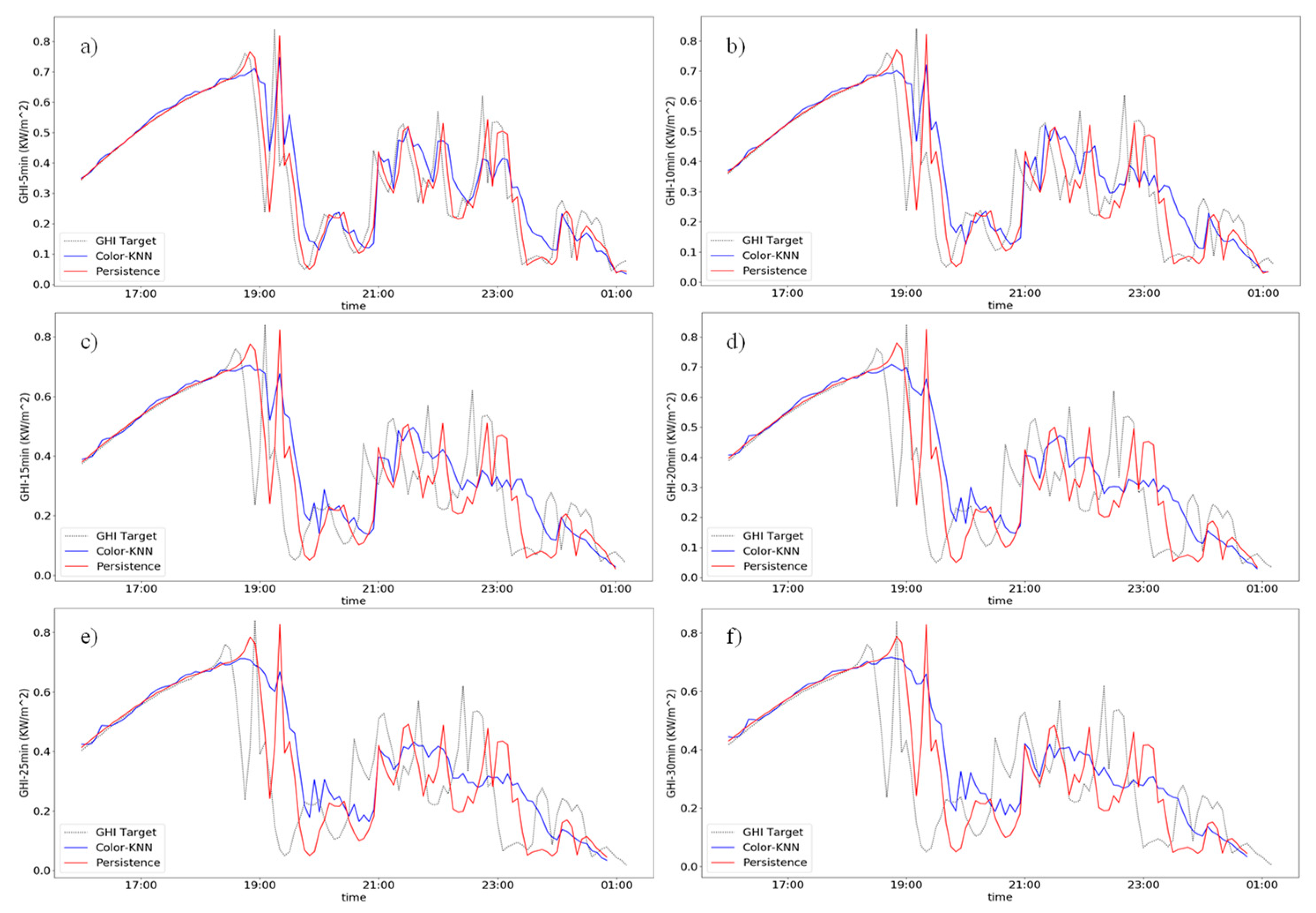
4.3. Short-Term GHI Forecasting with CNN Features
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- West, S.R.; Rowe, D.; Sayeef, S.; Berry, A. Short-term irradiance forecasting using skycams: Motivation and development. Sol. Energy 2014, 110, 188–207. [Google Scholar] [CrossRef]
- Chandel, S.S.; Naik, M.N.; Chandel, R. Review of solar photovoltaic water pumping system technology for irrigation and community drinking water supplies. Renew. Sustain. Energy Rev. 2015, 49, 1084–1099. [Google Scholar] [CrossRef]
- Raza, M.Q.; Nadarajah, M.; Ekanayake, C. On recent advances in PV output power forecast. Sol. Energy 2016, 136, 125–144. [Google Scholar] [CrossRef]
- Pedro, H.T.C.; Larson, D.P.; Coimbra, C.F.M. A comprehensive dataset for the accelerated development and bench-marking of solar forecasting methods. J. Renew. Sustain. Energy 2019, 11, 036102. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.; Wang, L.; Lai, L.L. Data-Driven Short-Term Solar Irradiance Forecasting Based on Information of Neighboring Sites. IEEE Trans. Ind. Electron. 2019, 66, 9918–9927. [Google Scholar] [CrossRef]
- Huang, C.; Zhao, Z.; Wang, L.; Zhang, Z.; Luo, X. Point and interval forecasting of solar irradiance with an active Gaussian process. IET Renew. Power Gener. 2020, 14, 1020–1030. [Google Scholar] [CrossRef]
- Peng, Z.; Yoo, S.; Yu, D.; Huang, D. Solar irradiance forecast system based on geostationary satellite. In Proceedings of the 2013 IEEE International Conference on Smart Grid Communications (SmartGridComm), Vancouver, BC, Canada, 21–24 October 2013; pp. 708–713. [Google Scholar]
- Larson, D.P.; Nonnenmacher, L.; Coimbra, C.F. Day-ahead forecasting of solar power output from photovoltaic plants in the American Southwest. Renew. Energy 2016, 91, 11–20. [Google Scholar] [CrossRef]
- Barbieri, F.; Rajakaruna, S.; Ghosh, A. Very short-term photovoltaic power forecasting with cloud modeling: A review. Renew. Sustain. Energy Rev. 2017, 75, 242–263. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Florita, A.; Hodge, B.-M.; Lu, S.; Hamann, H.F.; Banunarayanan, V.; Brockway, A. A suite of metrics for assessing the performance of solar power forecasting. Sol. Energy 2015, 111, 157–175. [Google Scholar] [CrossRef] [Green Version]
- Peng, Z.; Yu, D.; Huang, D.; Heiser, J.; Kalb, P. A hybrid approach to estimate the complex motions of clouds in sky images. Sol. Energy 2016, 138, 10–25. [Google Scholar] [CrossRef]
- Fu, C.-L.; Cheng, H.-Y. Predicting solar irradiance with all-sky image features via regression. Sol. Energy 2013, 97, 537–550. [Google Scholar] [CrossRef]
- Pedro, H.T.C.; Coimbra, C.F.M. Nearest-neighbor methodology for prediction of intra-hour global horizontal and di-rect normal irradiances. Renew. Energy 2015, 80, 770–782. [Google Scholar]
- Kamadinata, J.O.; Ken, T.L.; Suwa, T. Sky image-based solar irradiance prediction methodologies using artificial neural networks. Renew. Energy 2019, 134, 837–845. [Google Scholar] [CrossRef]
- Pedro, H.T.C.; Coimbra, C.F.M.; Lauret, P. Adaptive image features for intra-hour solar forecasts. J. Renew. Sustain. Energy 2019, 11, 036101. [Google Scholar] [CrossRef] [Green Version]
- Yang, D.; van der Meer, D.; Munkhammar, J. Probabilistic solar forecasting benchmarks on a standardized dataset at Folsom, California. Sol. Energy 2020, 206, 628–639. [Google Scholar] [CrossRef]
- Pedro, H.T.; Coimbra, C.F.; David, M.; Lauret, P. Assessment of machine learning techniques for deterministic and proba-bilistic intra-hour solar forecasts. Renew. Energy 2018, 123, 191–203. [Google Scholar] [CrossRef]
- Chu, Y.; Pedro, H.; Li, M.; Coimbra, C.F. Real-time forecasting of solar irradiance ramps with smart image processing. Sol. Energy 2015, 114, 91–104. [Google Scholar] [CrossRef]
- Yang, H.; Kurtz, B.; Nguyen, D.; Urquhart, B.; Chow, C.W.; Ghonima, M.; Kleissl, J. Solar irradiance forecasting using a ground-based sky imager developed at UC San Diego. Sol. Energy 2014, 103, 502–524. [Google Scholar] [CrossRef]
- Alonsomontesinos, J.; Batlles, F.J.; Portillo, C. Solar irradiance forecasting at one-minute intervals for different sky con-ditions using sky camera images. Energy Convers. Manag. 2015, 105, 1166–1177. [Google Scholar] [CrossRef]
- Zhen, Z.; Pang, S.; Wang, F.; Li, K.; Li, Z.; Ren, H.; Shafie-Khah, M.; Catalao, J.P.S. Pattern Classification and PSO Optimal Weights Based Sky Images Cloud Motion Speed Calculation Method for Solar PV Power Forecasting. IEEE Trans. Ind. Appl. 2019, 55, 3331–3342. [Google Scholar] [CrossRef]
- Ji, S.; Xu, W.; Yang, M.; Yu, K. 3D Convolutional Neural Networks for Human Action Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 221–231. [Google Scholar] [CrossRef] [Green Version]
- Jain, V.; Bollmann, B.; Richardson, M.; Berger, D.R.; Helmstaedter, M.N.; Briggman, K.L.; Denk, W.; Bowden, J.B.; Mendenhall, J.M.; Abraham, W.C.; et al. Boundary Learning by Optimization with Topological Constraints. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2488–2495. [Google Scholar]
- Karpathy, A.; Toderici, G.; Shetty, S.; Leung, T.; Sukthankar, R. Large-Scale Video Classification with Convolutional Neural Networks. In Proceedings of the IEEE Comput Soc Conf Comput Vision Pattern Recognit, Columbus, OH, USA, 23–28 June 2014; pp. 1725–1732. [Google Scholar]
- Shou, Z.; Wang, D.; Chang, S.-F. Temporal Action Localization in Untrimmed Videos via Multi-stage CNNs. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1049–1058. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Li, F.F. Imagenet: A Large-Scale Hierarchical Image Database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Ineichen, P.; Perez, R. A new airmass independent formulation for the Linke turbidity coefficient. Sol. Energy 2002, 73, 151–157. [Google Scholar] [CrossRef] [Green Version]
- Bae, K.Y.; Jang, H.S.; Sung, D.K. Hourly Solar Irradiance Prediction Based on Support Vector Machine and Its Error Analysis. IEEE Trans. Power Syst. 2016, 32, 1. [Google Scholar] [CrossRef]
- Manjili, Y.S.; Vega, R.; Jamshidi, M.M. Data-Analytic-Based Adaptive Solar Energy Forecasting Framework. IEEE Syst. J. 2018, 12, 285–296. [Google Scholar] [CrossRef]
- Hara, K.; Kataoka, H.; Satoh, Y. Can Spatiotemporal 3D CNNs Retrace the History of 2D CNNs and ImageNet? In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 6546–6555. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- He, K.; Girshick, R.; Dollár, P. Rethinking imagenet pre-training. In Proceedings of the IEEE Comput Soc Conf Comput Vision Pattern Recognit, Long Beach, CA, USA, 16–20 June 2019; pp. 4918–4927. [Google Scholar]
- Kataoka, H.; Wakamiya, T.; Hara, K. Would Mega-scale Datasets Further Enhance Spatiotemporal 3D CNNs. arXiv 2020, arXiv:2004.04968. Available online: https://arxiv.org/abs/2004.04968 (accessed on 10 April 2020).
- Maaten, L.v.d.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Block | Conv1 | Conv2 | Conv3 | Conv4 | Conv5 | FC | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| F | N | F | N | F | N | F | N | ||||
| ResNet 34 | Basic | Conv. 7, 64, max pool | 64 | 3 | 128 | 4 | 256 | 6 | 512 | 3 | Average Pool, C-d FC |
| ResNet 50 | Bottleneck | 64 | 3 | 128 | 4 | 256 | 6 | 512 | 3 | ||
| MAE (W/m2) | MBE (W/m2) | RMSE (W/m2) | MAPE (%) | Skill (%) | ||
|---|---|---|---|---|---|---|
| Persistence | 32.3 ± 7.0 | 0.9 ± 0.5 | 73.2 ± 11.9 | 14.0 ± 3.5 | -- | |
| ANN | Endo | 31.5 ± 6.7 | −3.5 ± 2.1 | 65.5 ± 10.3 | 16.4 ± 5.0 | 10.4 ± 1.0 |
| Exo | 33.5 ± 6.7 | −1.9 ± 2.1 | 65.0 ± 9.3. | 16.9 ± 4.4 | 10.9 ± 2.0 | |
| SVM | Endo | 36.3 ± 1.7 | 3.5 ± 7.2 | 67.1 ± 8.4 | 17.2 ± 2.5 | 7.8 ± 4.5 |
| Exo | 38.8 ± 4.3 | 7.4 ± 2.8 | 67.4 ± 7.8 | 17.3 ± 2.8 | 7.2 ± 5.7 | |
| KNN | Endo | 31.5 ± 6.3 | −2.8 ± 2.2 | 65.6 ± 9.9 | 16.4 ± 4.6 | 10.1 ± 1.5 |
| Exo | 33.7 ± 5.1 | −1.9 ± 1.7 | 63.3 ± 8.1 | 16.9 ± 3.9 | 13.0 ± 4.0 |
| Res34 | Res50 | Tra | Att | FCR | RMSE (W/m2) | MAPE (%) | Skill (%) |
|---|---|---|---|---|---|---|---|
| √ | 73.4 ± 7.9 | 20.6 ± 3.2 | −1.4 ± 7.4 | ||||
| √ | √ | 64.5 ± 9.5 | 14.2 ± 3.5 | 11.5 ± 2.1 | |||
| √ | √ | 63.5 ± 9.3 | 14.7 ± 3.6 | 12.9 ± 1.8 | |||
| √ | √ | √ | 62.6 ± 9.4 | 14.4 ± 3.9 | 14.2 ± 1.8 | ||
| √ | √ | √ | √ | 63.3 ± 9.0 | 14.4 ± 3.5 | 13.1 ± 2.6 |
| No. of Images | RMSE (W/m2) | MAPE (%) | Skill (%) |
|---|---|---|---|
| 5 | 58.2 | 11.8 | 13.2 |
| 10 | 60.0 | 12.5 | 10.1 |
| MAE (W/m2) | MBE (W/m2) | REMSE (W/m2) | MAPE (%) | Skill (%) | |
|---|---|---|---|---|---|
| ANN | 33.5 ± 6.7 | −1.9 ± 2.1 | 65.0 ± 9.3 | 16.9 ± 4.4 | 10.9 ± 2.0 |
| KNN | 33.7 ± 5.1 | −1.9 ± 1.7 | 63.3 ± 8.1 | 16.9 ± 3.9 | 13.0 ± 4.0 |
| WSM | 30.1 ± 6.0 | 3.6 ± 1.6 | 62.6 ± 9.4 | 14.4 ± 3.9 | 14.2 ± 1.8 |
| Color-KNN | Color-ANN | CNN-KNN | CNN-ANN | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| H | RMSE | MAPE | Skill | RMSE | MAPE | Skill | RMSE | MAPE | Skill | RMSE | MAPE | Skill |
| 5 | 49.8 | 11.1 | 5.1 | 48.6 | 8.9 | 7.3 | 46.8 | 8.9 | 10.7 | 46.3 | 8.4 | 11.8 |
| 10 | 58.7 | 14.2 | 12.5 | 59.1 | 13.2 | 11.9 | 56.7 | 12.0 | 15.5 | 57.6 | 12.1 | 14.2 |
| 15 | 63.1 | 16.4 | 14.4 | 64.2 | 16.3 | 12.9 | 62.6 | 14.1 | 15.1 | 65.3 | 14.9 | 11.4 |
| 20 | 66.6 | 18.3 | 15.6 | 68.7 | 19.3 | 12.8 | 66.3 | 15.1 | 15.9 | 66.5 | 15.5 | 15.6 |
| 25 | 69.6 | 19.9 | 15.5 | 72.9 | 19.8 | 11.3 | 67.6 | 17.3 | 17.8 | 69.1 | 18.1 | 16.0 |
| 30 | 72.1 | 21.7 | 14.9 | 73.7 | 21.3 | 12.9 | 72.2 | 19.2 | 14.7 | 72.7 | 19.2 | 14.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Wang, L.; Huang, C.; Luo, X. 3D-CNN-Based Sky Image Feature Extraction for Short-Term Global Horizontal Irradiance Forecasting. Water 2021, 13, 1773. https://doi.org/10.3390/w13131773
Yang H, Wang L, Huang C, Luo X. 3D-CNN-Based Sky Image Feature Extraction for Short-Term Global Horizontal Irradiance Forecasting. Water. 2021; 13(13):1773. https://doi.org/10.3390/w13131773
Chicago/Turabian StyleYang, Hao, Long Wang, Chao Huang, and Xiong Luo. 2021. "3D-CNN-Based Sky Image Feature Extraction for Short-Term Global Horizontal Irradiance Forecasting" Water 13, no. 13: 1773. https://doi.org/10.3390/w13131773
APA StyleYang, H., Wang, L., Huang, C., & Luo, X. (2021). 3D-CNN-Based Sky Image Feature Extraction for Short-Term Global Horizontal Irradiance Forecasting. Water, 13(13), 1773. https://doi.org/10.3390/w13131773