
Automated Detection of Instability-Inducing Channel Geometry Transitions in Saint-Venant Simulation of Large-Scale River Networks


Abstract
:1. Introduction
Background
2. Methods
2.1. Governing Equations
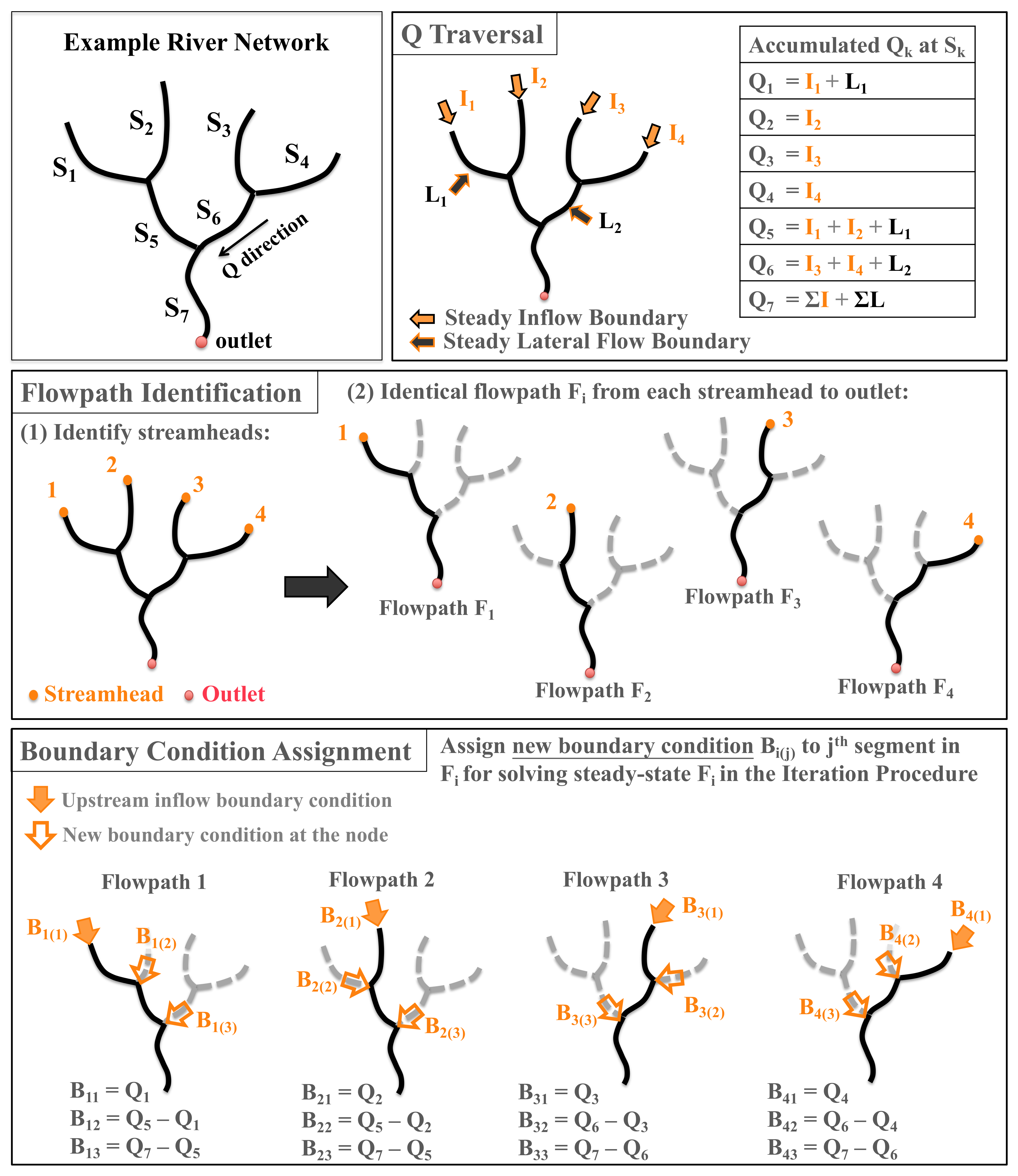
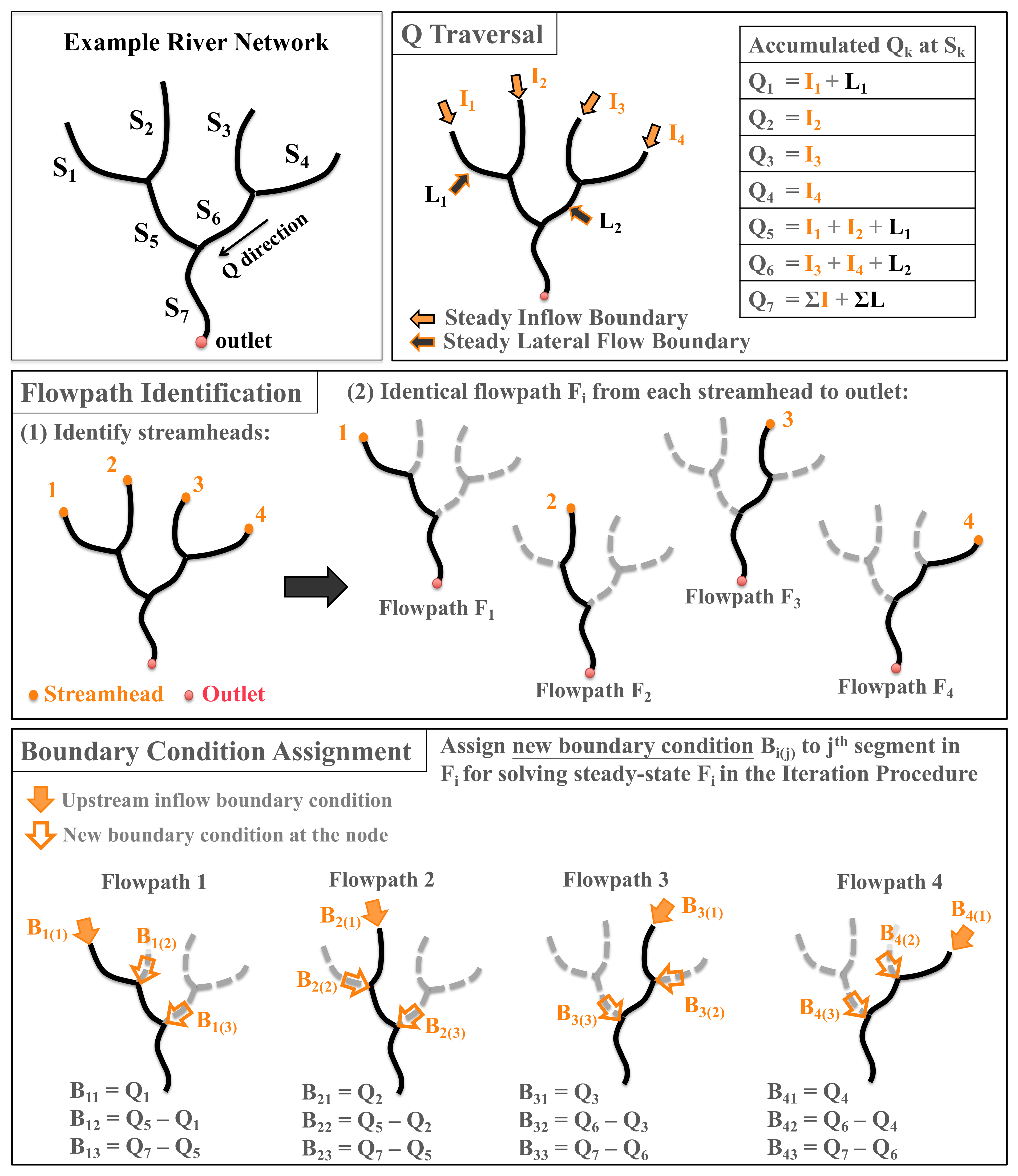
2.2. Flowpath Topological Dependence
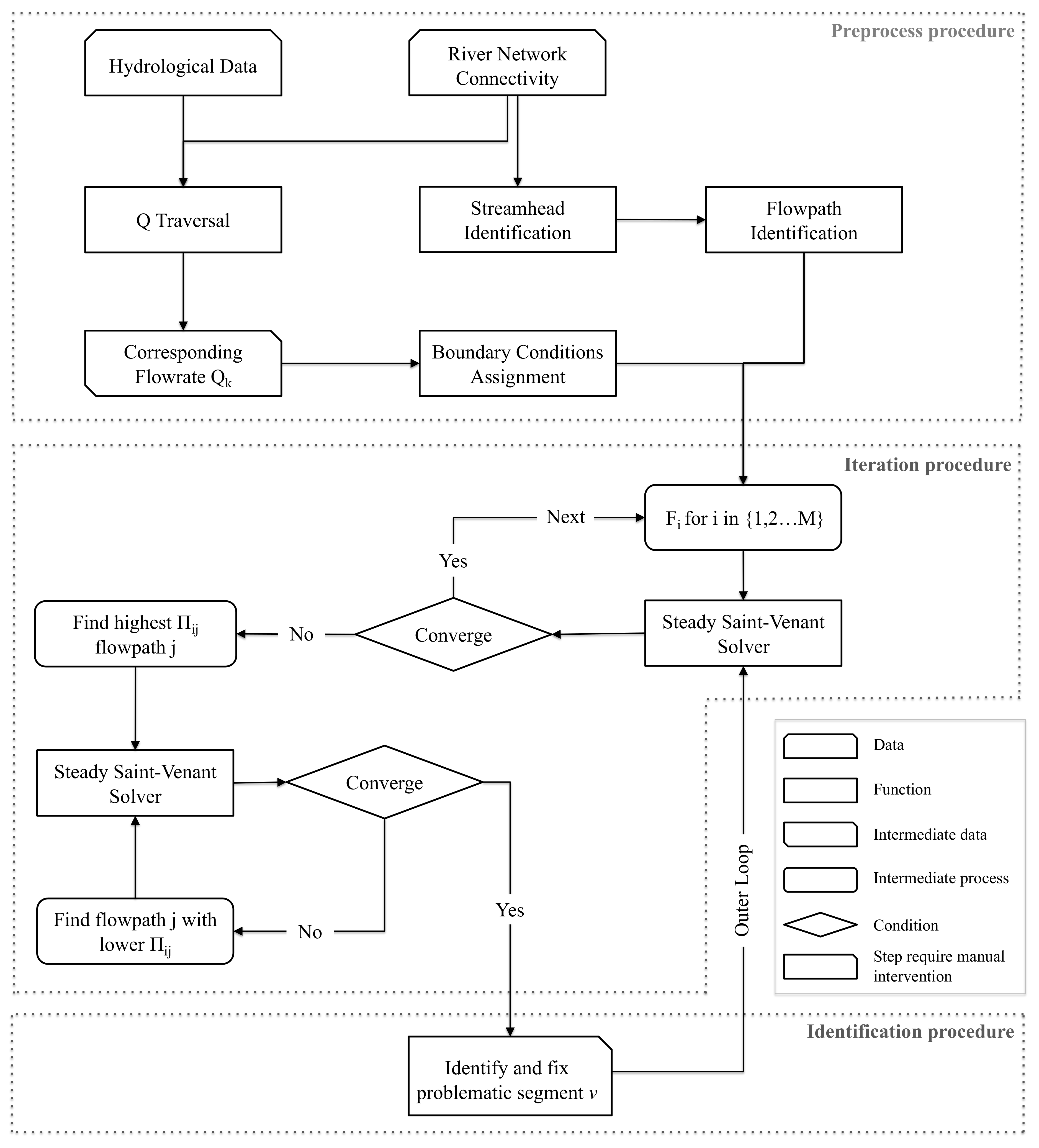
2.3. Sweep Search Algorithm (SSA)
3. Computational Tests
3.1. Overview
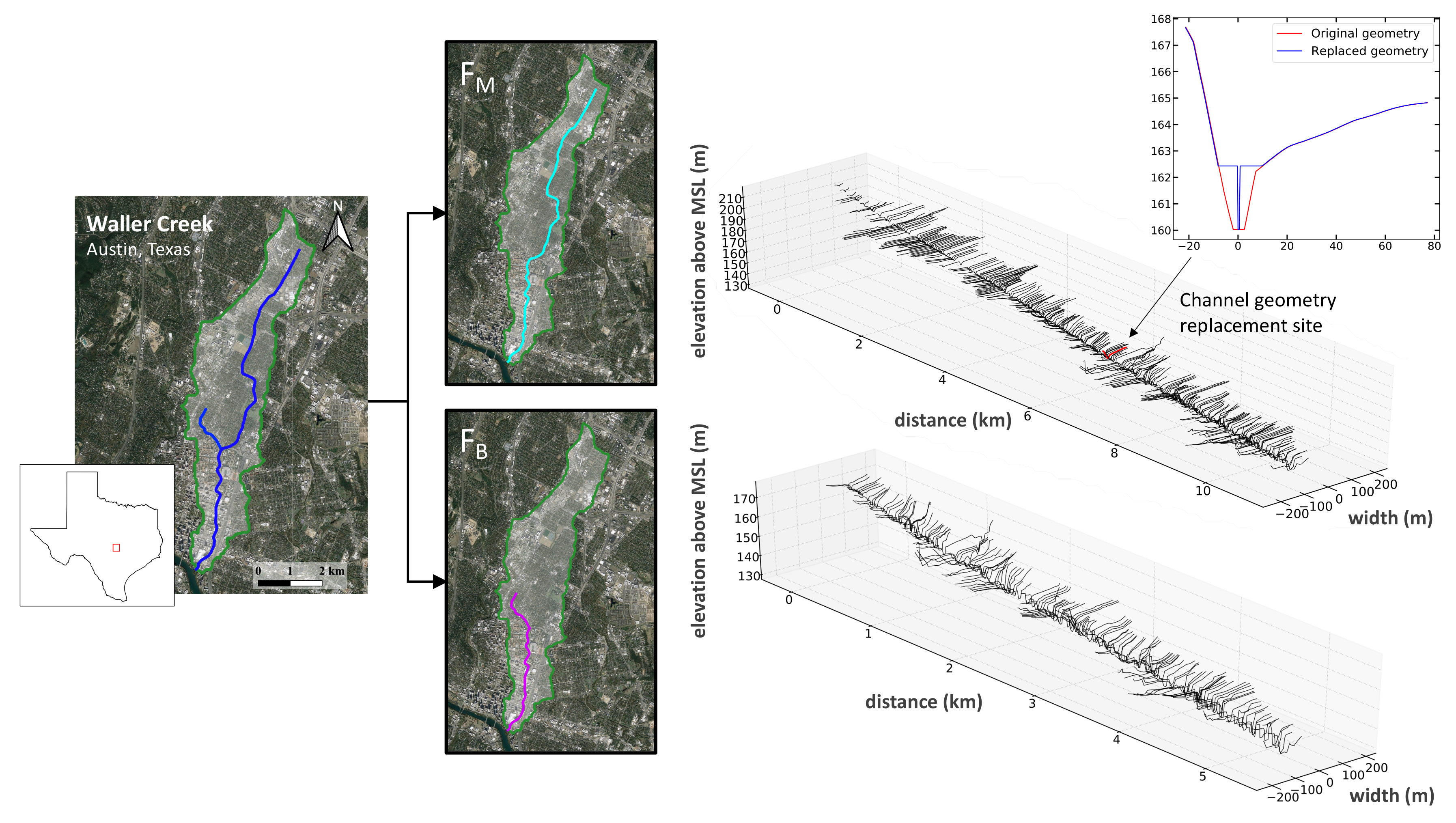
3.2. Local-Scale Test Case—Waller Creek, Austin, Texas
3.3. River-Basin Test Case—Lavaca River, Texas
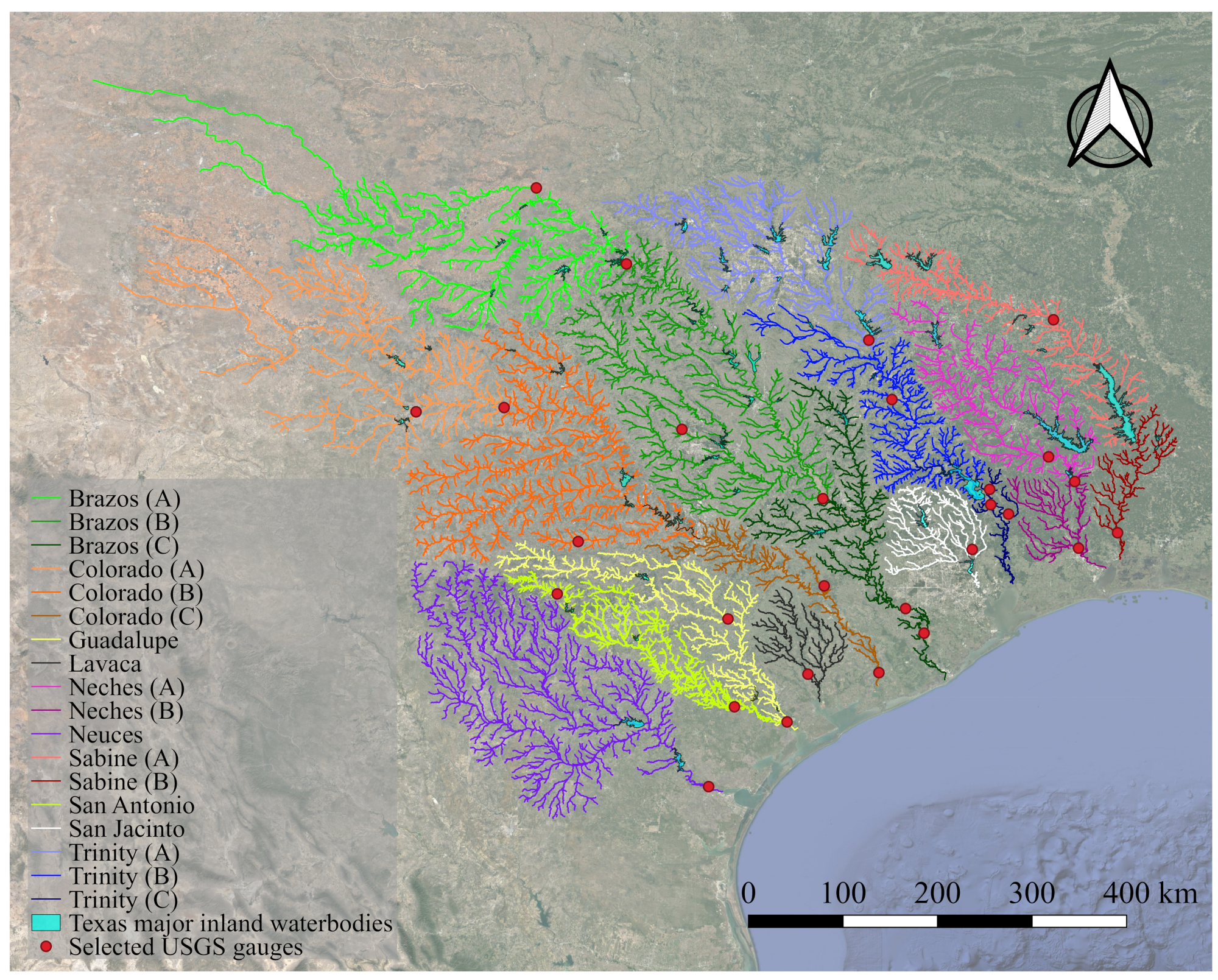
3.4. Large-Scale Test Case—The Texas–Gulf Watershed
4. Results
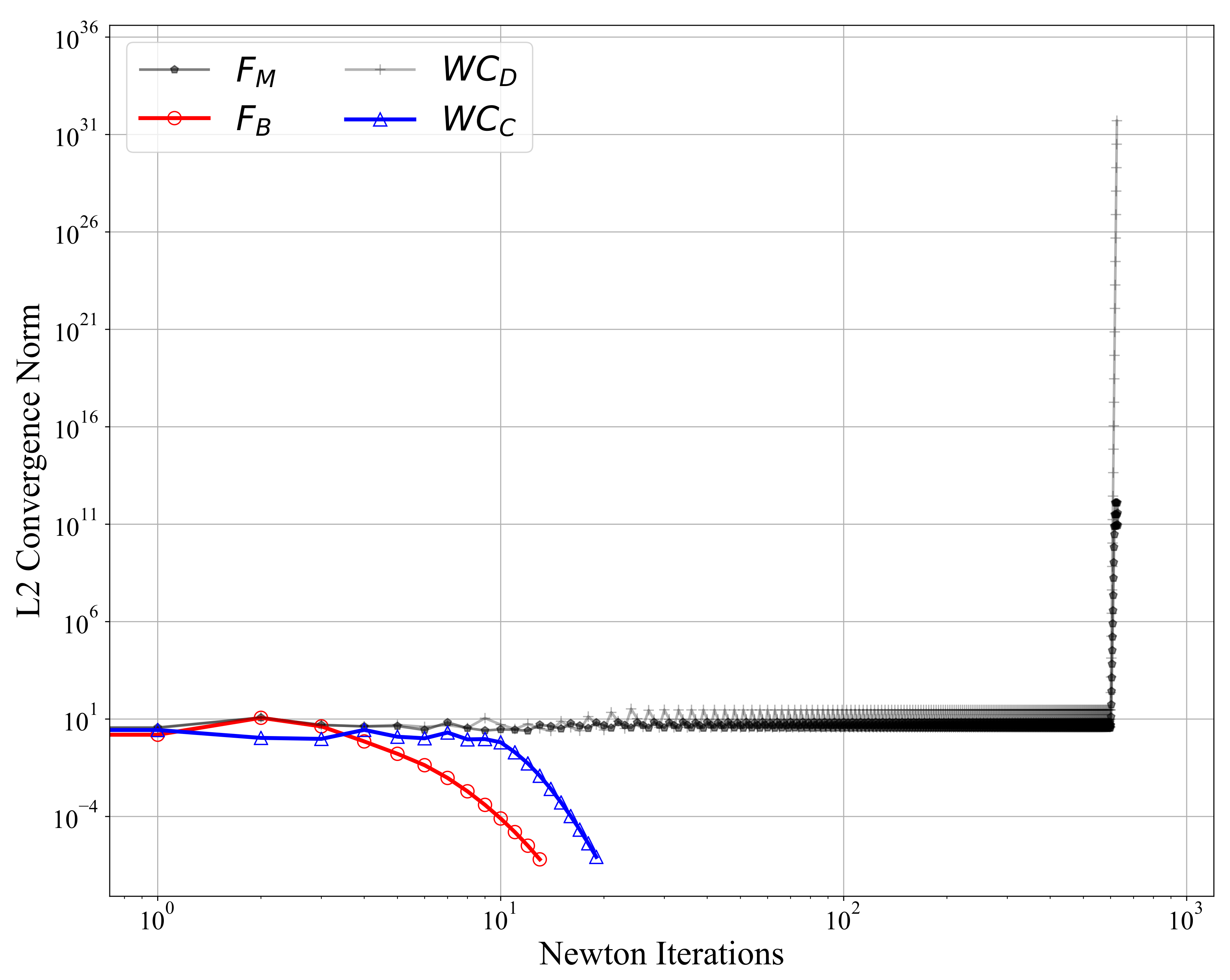
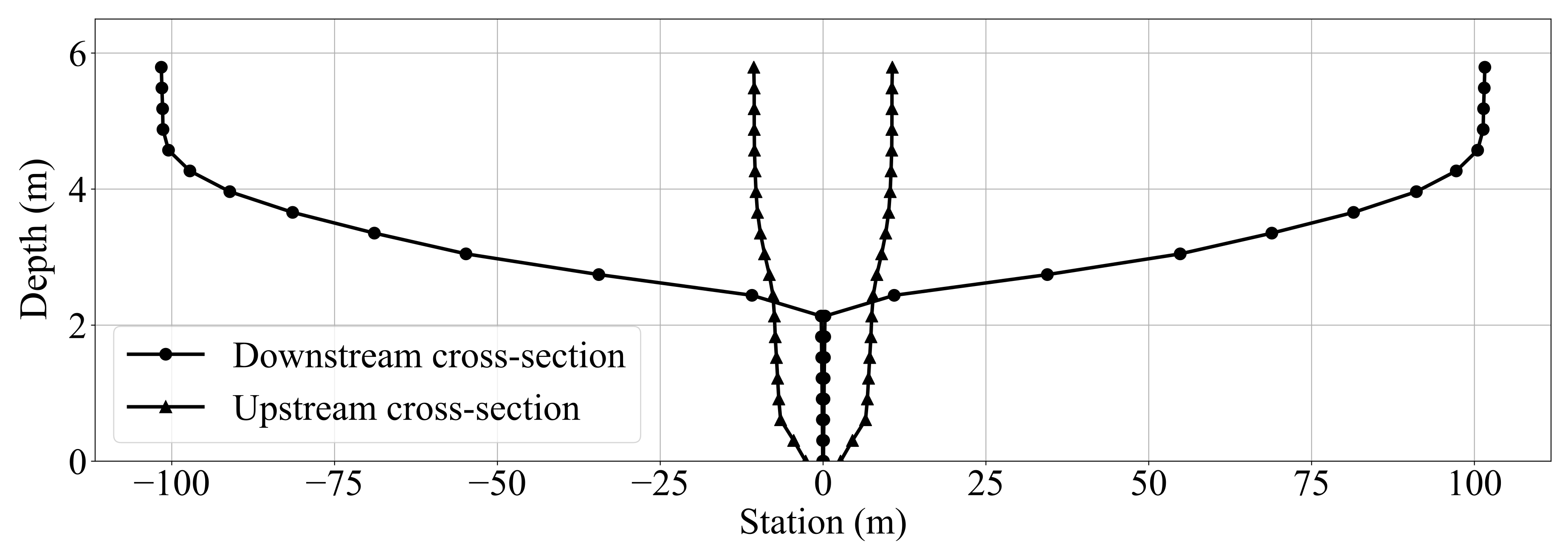
4.1. Local-Scale Test Case—Waller Creek, Austin, Texas
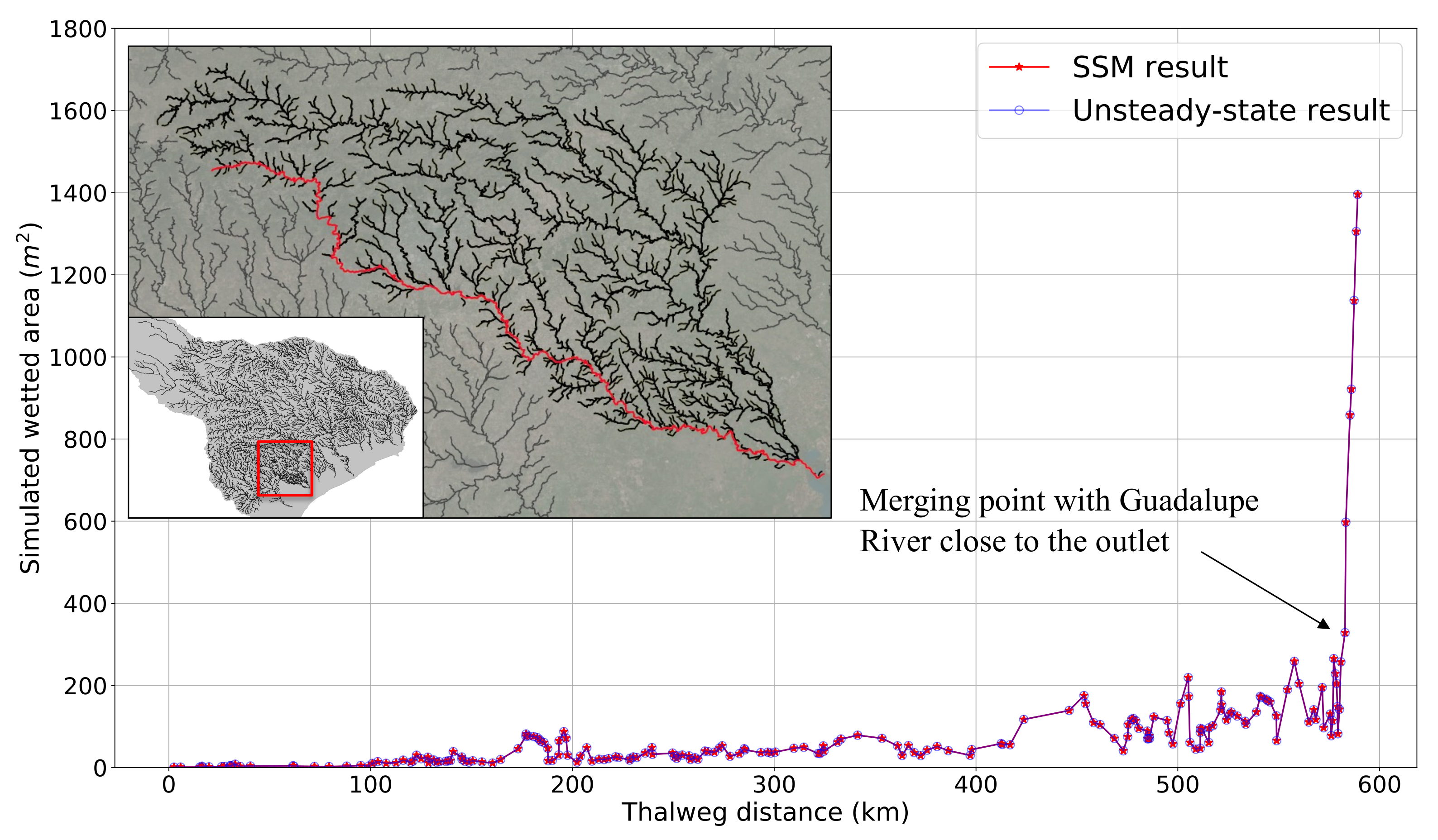
4.2. River-Basin Test Case—Lavaca River, Texas
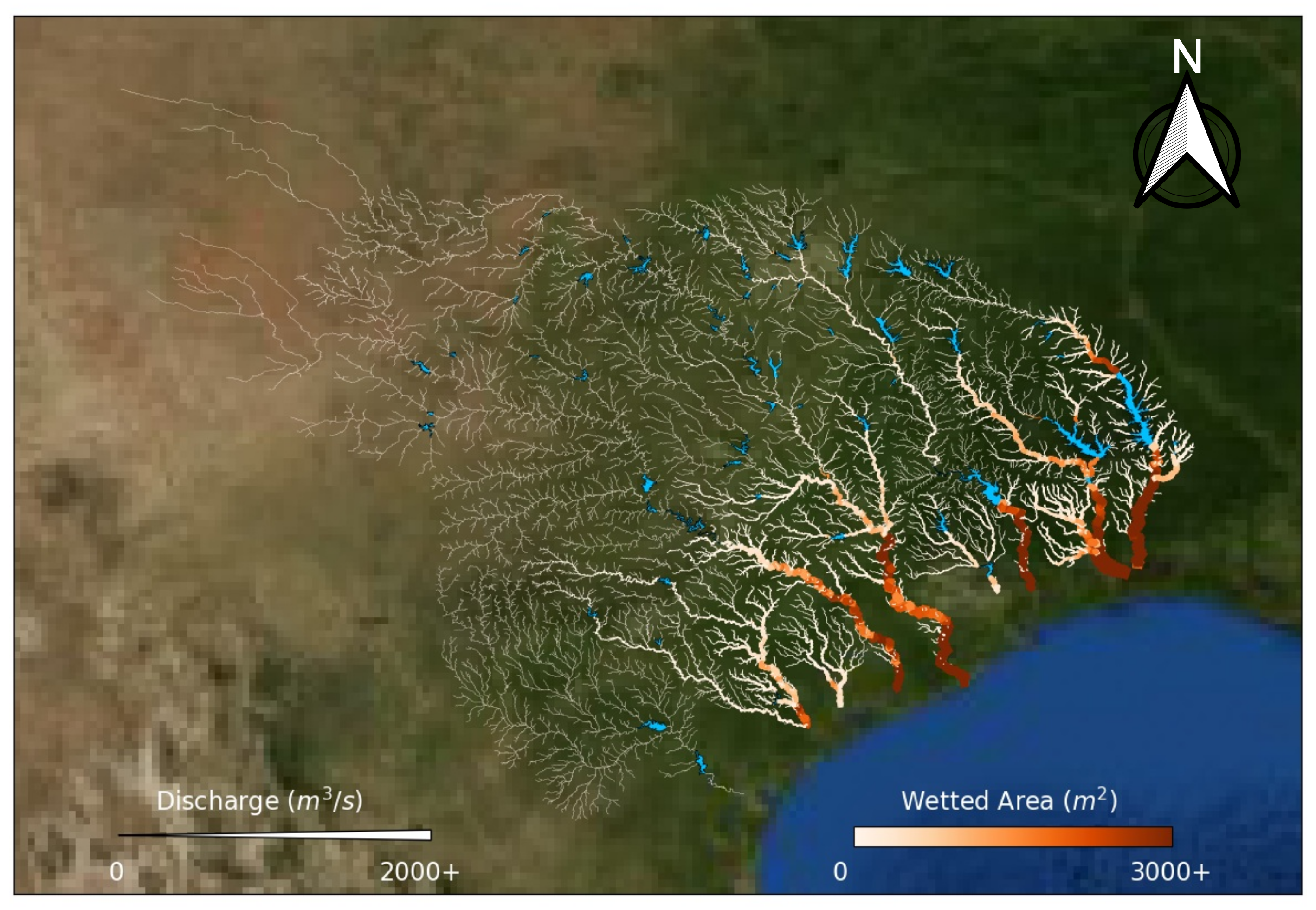
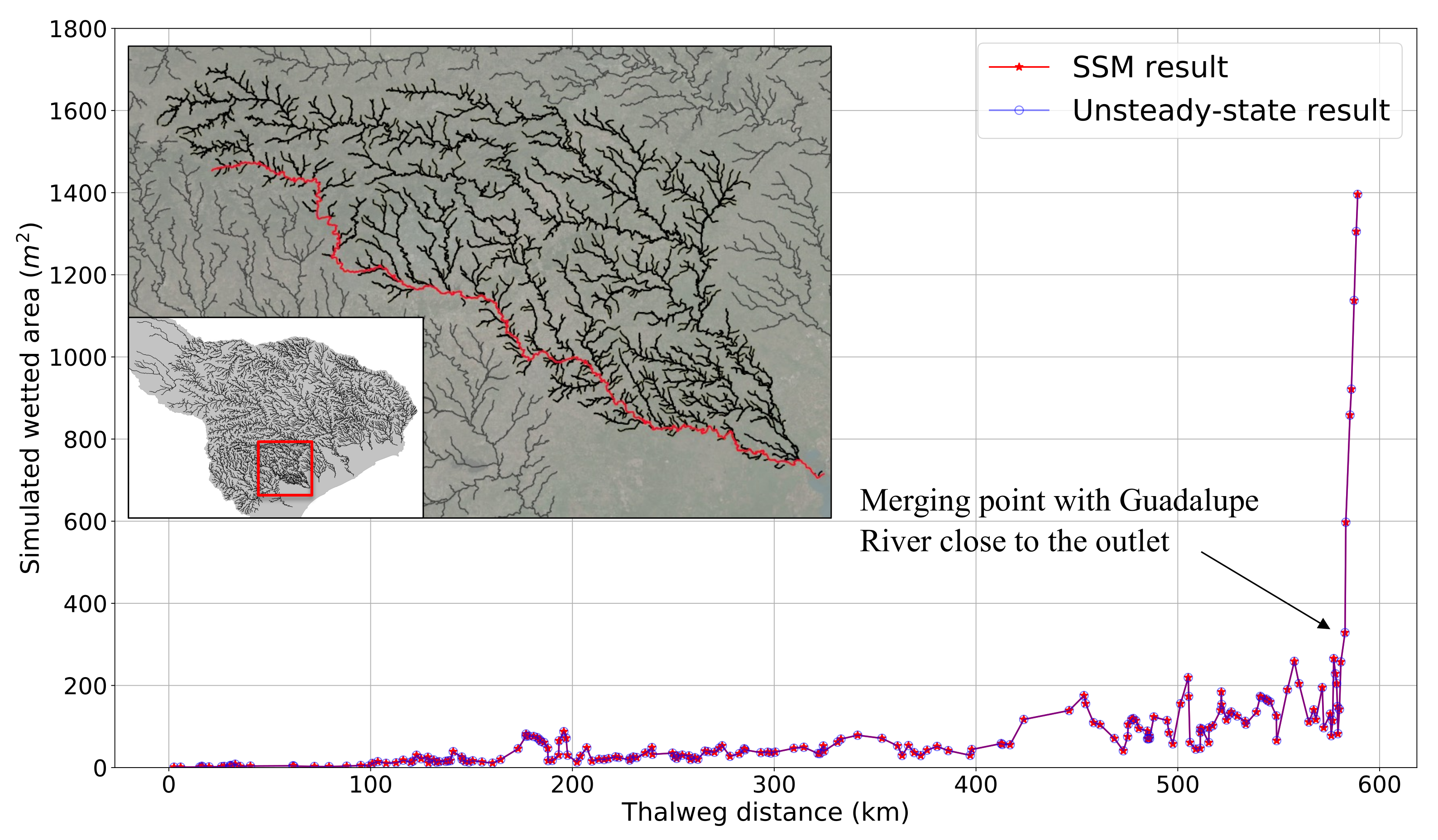
4.3. Large-Scale Test Case—Texas–Gulf Watershed
5. Discussion
5.1. Inherent Limitations of SSA/SSM
5.2. Limitations of the Present Implementation/Application
5.3. Use of HAND-Generated Geometry
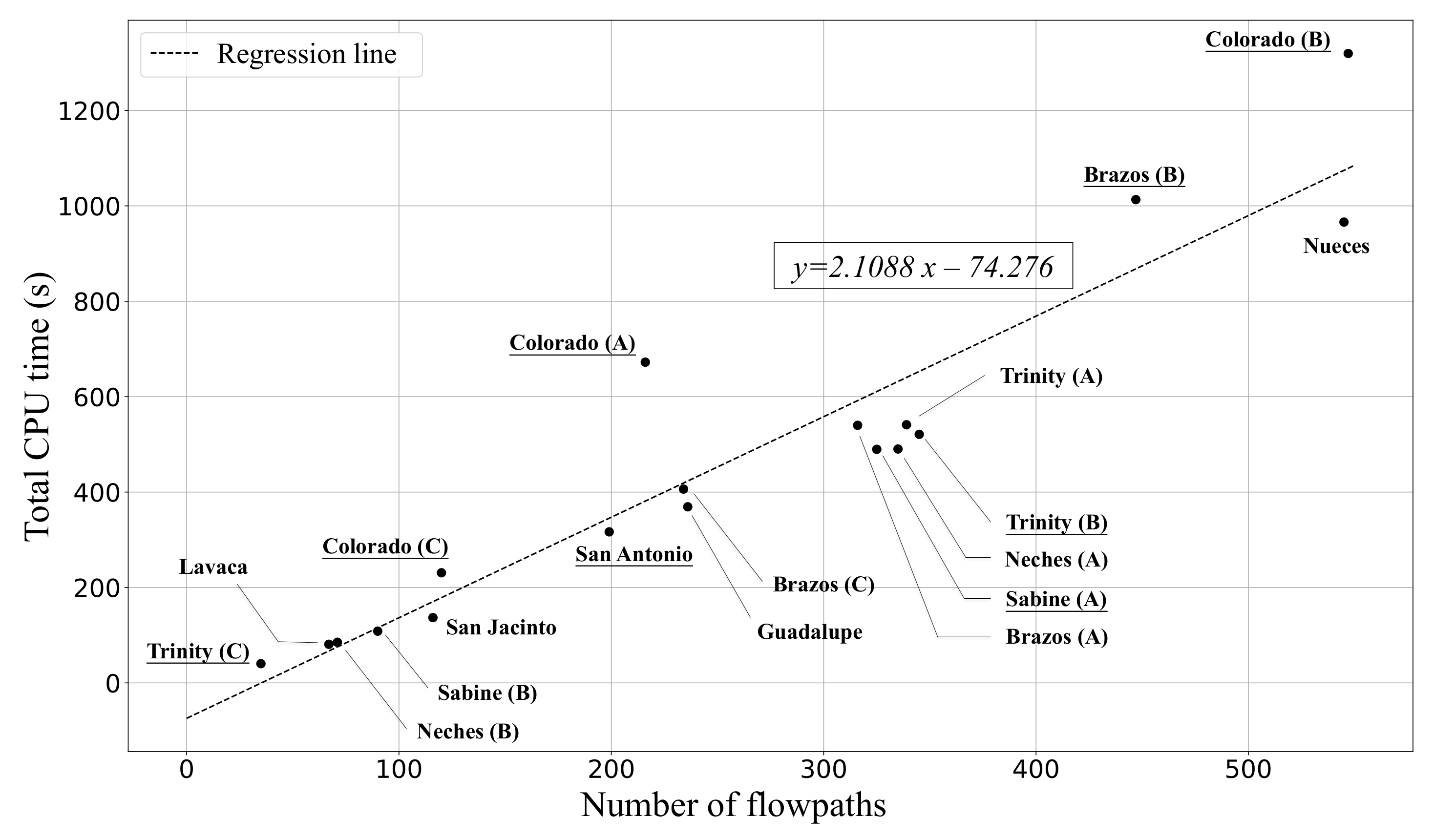
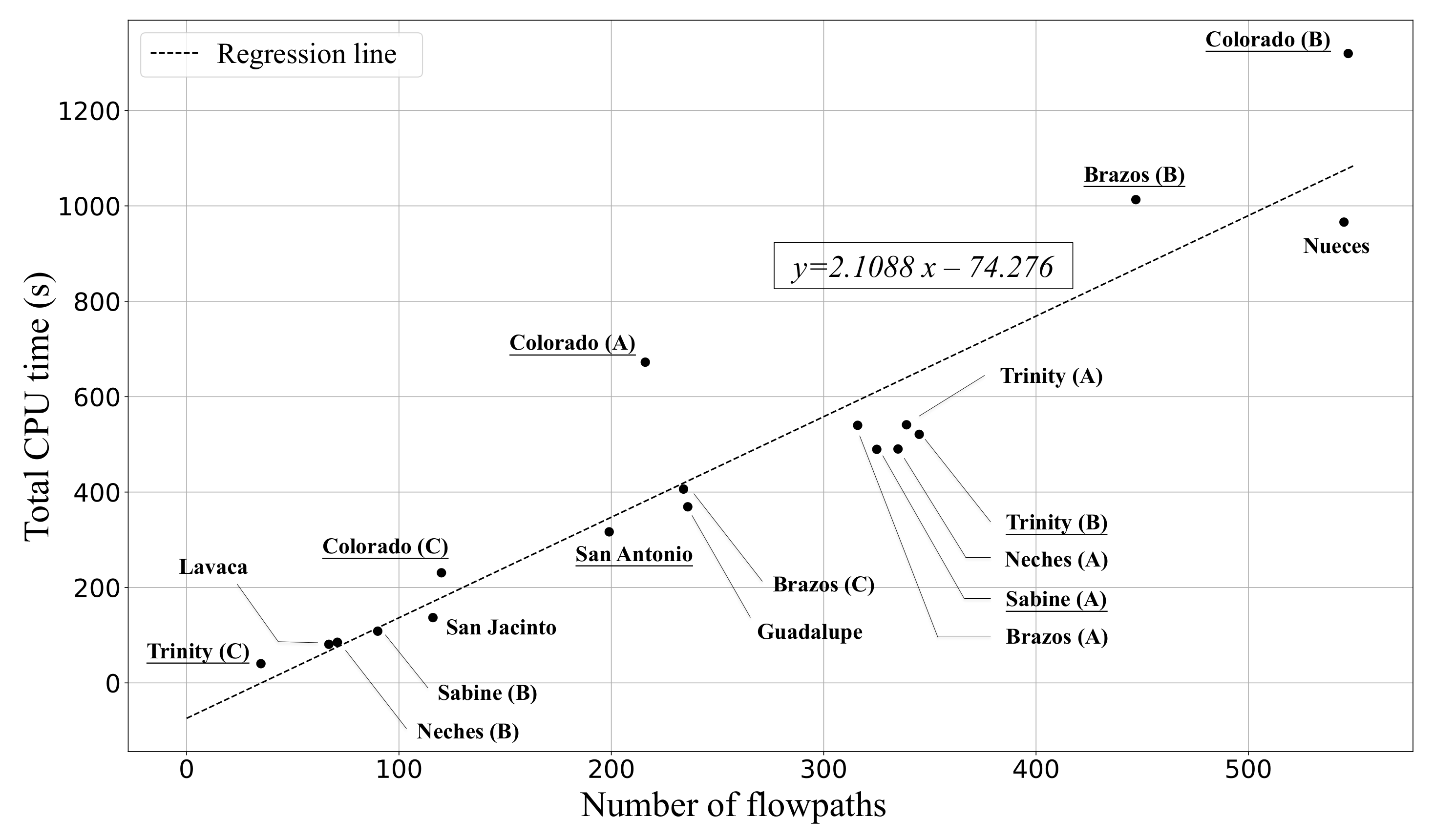
5.4. Computational Time and Parallelization
5.5. The Need for Automated Geometry Fixes
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Notation
| A | Cross-sectional area () |
| g | Gravitational acceleration () |
| h | Water depth (m) |
| n | Manning’s roughness () |
| Flowpath topological dependence | |
| P | Wetted perimeter (m) |
| Q | Volumetric flow rate () |
| Flow rate per unit length through channel sides () | |
| Channel bottom slope | |
| Channel friction slope | |
| t | Time (s) |
| W | Channel width (m) |
| x | Along-channel spatial coordinate |
| Y | Certical height from channel bottom |
Appendix A. USGS Gauges of the Texas–Gulf Basin Selected for the Large-Scale Test Case
- Inflow boundary conditions determination. The measured flow data at the selected USGS stations are distributed uniformly across all the inflow boundaries at the streamhead reaches locate at the upstream of the selected gauge. This provides the synthetic inflow boundary at the streamheads of each channel.
- Downstream boundary condition determination. Measured water depth data at the selected USGS gauges are used to determine the downstream boundary conditions of each river network in the simulation. The selected USGS gauges are generally the gauges that are most downstream with available data in the river network.
- Internal boundary condition determination. Stations selected for determining internal boundary conditions are mostly located at reservoirs or along main stems with complete measured data. Internal boundary conditions are used to subdivide the river into multiple subnetworks. The measured water depth at the selected USGS gauge is then used to generate downstream boundary conditions for the upstream subnetwork, and the measured flowrate data are used as the inflow boundary condition for the downstream subnetwork. Using main stream gauges as breakpoints to split the river network is a common practice in hydrological routing in engineer applications (e.g., National Water Model flow nudging feature).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| USGS Gauge Name | Station Code | River Name | Drainage Area | Hydrological |
|---|---|---|---|---|
| Information from the Gauge | ||||
| Cowhouse Creek at Pidcoke | 08101000 | Brazos River | 1178 | inflow boundary condition station |
| Brazos Rv nr Hempstead | 08115000 | Brazos River | 113,648 | inflow boundary condition station |
| Brazos Rv at Seymour | 08082500 | Brazos River | 40,243 | inflow boundary condition station |
| Brazos Rv at SH 21 nr Bryan | 08108700 | Brazos River | 101,136 | internal boundary condition and inflow boundary condition station |
| Brazos Rv nr Graford | 08088610 | Brazos River | 61,113 | internal boundary condition and inflow boundary condition station |
| Brazos Rv nr Rosharon | 08116650 | Brazos River | 117,427 | downstream boundary condition station |
| Pedernales Rv nr Fredericksburg | 08152900 | Colorado River | 955 | inflow boundary condition station |
| Colorado Rv nr Stacy | 08136700 | Colorado River | 62,659 | internal boundary condition and inflow boundary condition station |
| Colorado Rv at Austin | 08158000 | Colorado River | 101,032 | internal boundary condition and inflow boundary condition station |
| Colorado Rv nr Bay City | 08162500 | Colorado River | 109,401 | downstream boundary condition station |
| Concho Rv at San Angelo | 08136000 | Colorado River | 14,353 | inflow boundary condition station |
| Redgate Ck nr Columbus | 08160800 | Colorado River | 44.8 | inflow boundary condition station |
| Guadalupe Rv at Gonzales | 08173900 | Guadalupe River | 9039 | inflow boundary condition |
| Guadalupe Rv nr Tivoli | 08188800 | Guadalupe River | 26,231 | downstream boundary condition station |
| Lavaca Rv nr Edna | 08164000 | Lavaca River | 2116 | inflow boundary condition and downstream boundary condition station |
| Neches Rv nr Rockland | 08033500 | Neches River | 9417 | inflow boundary condition |
| Neches Rv nr Town Bluff | 08040600 | Neches River | 19,616 | internal boundary condition and inflow boundary condition station |
| Neches Rv Saltwater Barrier at Beaumont | 08041780 | Neches River | 25,353 | downstream boundary condition station |
| Nueces Rv at Calallen | 08211500 | Neuces River | 43,211 | downstream boundary condition station |
| Sabine Rv nr Beckville | 08022040 | Sabine River | 9295 | inflow boundary condition station |
| Sabine Rv at Toledo Bd Res nr Burkeville | 08025360 | Sabine River | 18,591 | internal boundary condition and inflow boundary condition station |
| Sabine Rv nr Ruliff | 08030500 | Sabine River | 24,162 | downstream boundary condition station |
| E Fork San Jacinto Rv nr New Caney | 08070200 | San Jacinto River | 1004 | inflow boundary condition and downstream boundary condition station |
| San Antonio Rv at Goliad | 08188500 | San Antonio River | 10,155 | downstream boundary condition station |
| Medina Rv at Bandera | 08178880 | San Antonio River | 849 | inflow boundary condition station |
| Upper Keechi Ck nr Oakwood | 08065200 | Trinity River | 388 | inflow boundary condition station |
| Trinity Rv at Trinidad | 08062700 | Trinity River | 22,113 | inflow boundary condition station and internal boundary condition |
| Menard Ck nr Rye | 08066300 | Trinity River | 393 | inflow boundary condition station |
| Long King Ck at Livingston | 08066200 | Trinity River | 365 | inflow boundary condition station |
| Trinity Rv nr Goodrich | 08066250 | Trinity River | 43,625 | internal boundary condition and inflow boundary condition station |
References
- Liu, F.; Hodges, B.R. Applying microprocessor analysis methods to river network modeling. Environ. Model. Softw. 2014, 52, 234–252. [Google Scholar] [CrossRef]
- Brunner, G.W. HEC-RAS, River Analysis System Reference Manual; U.S. Army Corps of Engineers, Hydrologic Engineering Center: Davis, CA, USA, 2016; p. 538.
- Yu, C.W.; Hodges, B.R.; Liu, F. A new form of the Saint-Venant equations for variable topography. Hydrol. Earth Syst. Sci. 2020, 24, 4001–4024. [Google Scholar] [CrossRef]
- Yu, C.W.; Liu, F.; Hodges, B.R. Consistent initial conditions for the Saint-Venant equations in river network modeling. Hydrol. Earth Syst. Sci. 2017, 21, 4959–4972. [Google Scholar] [CrossRef] [Green Version]
- Beighley, R.E.; Eggert, K.; Dunne, T.; He, Y.; Gummadi, V.; Verdin, K. Simulating hydrologic and hydraulic processes throughout the Amazon River Basin. Hydrol. Process. 2009, 23, 1221–1235. [Google Scholar] [CrossRef]
- Paiva, R.C.D.; Collischonn, W.; Tucci, C.E.M. Large scale hydrologic and hydrodynamic modeling using limited data and a GIS based approach. J. Hydrol. 2011, 406, 170–181. [Google Scholar] [CrossRef]
- Saleh, F.; Ducharne, A.; Flipo, N.; Oudin, L.; Ledoux, E. Impact of river bed morphology on discharge and water levels simulated by a 1D Saint–Venant hydraulic model at regional scale. J. Hydrol. 2013, 476, 169–177. [Google Scholar] [CrossRef]
- Hodges, B.R. Challenges in Continental River Dynamics. Environ. Model. Softw. 2013, 50, 16–20. [Google Scholar] [CrossRef]
- Rossman, L.A. Storm Water Management Model Reference Manual, Volume II—Hydraulics; Technical Report EPA/600/R-17/111; US EPA Office of Research and Development, Water Systems Division: Cincinnati, OH, USA, 2017.
- Strelkoff, T.; Clemmens, A. Approximating wetted perimeter in power-law cross section. J. Irrig. Drain. Eng. 2000, 126, 98–109. [Google Scholar] [CrossRef]
- Anwar, A.A.; de Vries, T.T. Hydraulically efficient power-law channels. J. Irrig. Drain. Eng. 2003, 129, 18–26. [Google Scholar] [CrossRef]
- Western, A.W.; Finlayson, B.L.; McMahon, T.A.; O’Neill, I.C. A method for characterising longitudinal irregularity in river channels. Geomorphology 1997, 21, 39–51. [Google Scholar] [CrossRef]
- Leopold, L.B.; Maddock, T. The Hydraulic Geometry of Stream Channels and Some Physiographic Implications; US Government Printing Office: Washington, DC, USA, 1953; Volume 252.
- Stall, J.B.; Fok, Y.S. Hydraulic Geometry of Illinois Streams; University of Illinois at Urbana-Champaign, Water Resources Center: Champaign, IL, USA, 1968. [Google Scholar]
- Singh, V.P.; Yang, C.T.; Deng, Z. Downstream hydraulic geometry relations: 1. Theoretical development. Water Resour. Res. 2003, 39. [Google Scholar] [CrossRef] [Green Version]
- Beighley, R.E.; Gummadi, V. Developing channel and floodplain dimensions with limited data: A case study in the Amazon Basin. Earth Surf. Process. Landforms 2011, 36, 1059–1071. [Google Scholar] [CrossRef]
- Danielson, J.J.; Gesch, D.B. Global Multi-Resolution Terrain Elevation Data 2010 (GMTED2010); Technical Report 2011-1073; US Geological Survey: Reston, VA, USA, 2011. [CrossRef]
- Liu, Y.Y.; Maidment, D.R.; Tarboton, D.G.; Zheng, X.; Wang, S. A CyberGIS integration and computation framework for high-resolution continental-scale flood inundation mapping. JAWRA J. Am. Water Resour. Assoc. 2018, 54, 770–784. [Google Scholar] [CrossRef] [Green Version]
- Nujic, M. Efficient implementation of nonoscillatory schemes for the computation of free-surface flows. J. Hydraul. Res. 1995, 33, 101–111. [Google Scholar] [CrossRef]
- Garcia-Navarro, P.; Vazquez-Cendon, M.E. On numerical treatment of the source terms in the shallow water equations. Comput. Fluids 2000, 29, 951–979. [Google Scholar] [CrossRef]
- Sanders, B.F. High-resolution and non-oscillatory solution of the St. Venant equations in non-rectangular and non-prismatic channels. J. Hydraul. Res. 2001, 39, 321–330. [Google Scholar] [CrossRef]
- Tseng, M.H. Improved treatment of source terms in TVD scheme for shallow water equations. Adv. Water Resour. 2004, 27, 617–629. [Google Scholar] [CrossRef]
- Xing, Y. Exactly well-balanced discontinuous Galerkin methods for the shallow water equations with moving water equilibrium. J. Comput. Phys. 2014, 257, 536–553. [Google Scholar] [CrossRef]
- Li, M.; Guyenne, P.; Li, F.; Xu, L. A positivity-preserving well-balanced central discontinuous Galerkin method for the nonlinear shallow water equations. J. Sci. Comput. 2017, 71, 994–1034. [Google Scholar] [CrossRef]
- Kvočka, D.; Falconer, R.A.; Bray, M. Appropriate model use for predicting elevations and inundation extent for extreme flood events. Nat. Hazards 2015, 79, 1791–1808. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Hals, J.; Moan, T. Comparative study of bond graph models for hydraulic transmission lines with transient flow dynamics. J. Dyn. Syst., Meas. Control 2012, 134, 031005. [Google Scholar] [CrossRef]
- Hodges, B.R. Conservative finite-volume forms of the Saint-Venant equations for hydrology and urban drainage. Hydrol. Earth Syst. Sci. 2019, 23, 1281–1304. [Google Scholar] [CrossRef] [Green Version]
- Fread, D.; Jin, M.; Lewis, J.M. An LPI numerical implicit solution for unsteady mixed-flow simulation. N. Am. Water Environ. Congr. 1996, 96, 49–72. [Google Scholar]
- Bates, P.D.; Horritt, M.S.; Fewtrell, T.J. A simple inertial formulation of the shallow water equations for efficient two-dimensional flood inundation modelling. J. Hydrol. 2010, 387, 33–45. [Google Scholar] [CrossRef]
- Tayfur, G.; Kavvas, M.L.; Govindaraju, R.S.; Storm, D.E. Applicability of St. Venant equations for two-dimensional overland flows over rough infiltrating surfaces. J. Hydraul. Eng. 1993, 119, 51–63. [Google Scholar] [CrossRef]
- De Saint-Venant, A.B. Thé orie du mouvement non permanent des eaux, avec application aux crues des rivié res et à l’introduction des maré es dans leurs lits. Comptes Rendus Séances Acad. Sci. 1871, 73, 237–240. [Google Scholar]
- Catella, M.; Paris, E.; Solari, L. Conservative scheme for numerical modeling of flow in natural geometry. J. Hydraul. Eng. 2008, 134, 736–748. [Google Scholar] [CrossRef] [Green Version]
- Audusse, E.; Bristeau, M.; Decoene, A. Numerical simulations of 3D free surface flows by a multilayer Saint-Venant model. Int. J. Numer. Methods Fluids 2008, 56, 331–350. [Google Scholar] [CrossRef]
- Cunge, J. Evaluation problem of storm water routing mathematical models. Water Res. 1974, 8, 1083–1087. [Google Scholar] [CrossRef]
- Ponce, V.M.; Simons, D.B.; Li, R.M. Applicability of kinematic and diffusion models. J. Hydraul. Div. 1978, 104, 353–360. [Google Scholar] [CrossRef]
- Cunge, J.A.; Holly, F.M.; Verwey, A. Practical Aspects of Computational River Hydraulics; Pitman Publishing Ltd.: Boston, MA, USA, 1980. [Google Scholar]
- Abbott, M.; Bathurst, J.; Cunge, J.; O’connell, P.; Rasmussen, J. An introduction to the European Hydrological System—Systeme Hydrologique Europeen,“SHE”, 2: Structure of a physically-based, distributed modelling system. J. Hydrol. 1986, 87, 61–77. [Google Scholar] [CrossRef]
- Saleem, M.R.; Zia, S.; Ashraf, W.; Ali, I.; Qamar, S. The space–time CESE scheme for shallow water equations incorporating variable bottom topography and horizontal temperature gradients. Comput. Math. Appl. 2018, 75, 933–956. [Google Scholar] [CrossRef]
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms; MIT Press: Cambridge, MA, USA, 2009; Volume 2. [Google Scholar]
- Hodges, B.R.; Liu, F. Rivers and electrical networks: Crossing disciplines in modeling and simulation. Found. Trends Electron. Des. Autom. 2014, 8, 1–116. [Google Scholar] [CrossRef]
- Falter, D.; Dung, N.; Vorogushyn, S.; Schröter, K.; Hundecha, Y.; Kreibich, H.; Apel, H.; Theisselmann, F.; Merz, B. Continuous, large-scale simulation model for flood risk assessments: Proof-of-concept. J. Flood Risk Manag. 2016, 9, 3–21. [Google Scholar] [CrossRef]
- Paiva, R.C.D.; Collischonn, W.; Bonnet, M.P.; de Goncalves, L.G.G. On the sources of hydrological prediction uncertainty in the Amazon. Hydrol. Earth Syst. Sci. 2012, 16, 3127–3137. [Google Scholar] [CrossRef] [Green Version]
- Zheng, X. Texas River Hydraulic Properties. 2016. Available online: https://www.hydroshare.org/resource/40d4dfa1afb04cf9a64831c3419e7443/ (accessed on 24 April 2021).
- Nobre, A.; Cuartas, L.; Hodnett, M.; Rennó, C.; Rodrigues, G.; Silveira, A.; Waterloo, M.; Saleska, S. Height Above the Nearest Drainage—A hydrologically relevant new terrain model. J. Hydrol. 2011, 404, 13–29. [Google Scholar] [CrossRef] [Green Version]
- National Oceanic and Atmospheric Administration (NOAA). National Water Model (NWM); NOAA: Washington, DC, USA, 2016. [Google Scholar]
- Fleischmann, A.; Brêda, J.; Passaia, O.; Wongchuig, S.; Fan, F.; Paiva, R.; Marques, G.; Collischonn, W. Regional scale hydrodynamic modeling of the river-floodplain-reservoir continuum. J. Hydrol. 2021, 596, 126114. [Google Scholar] [CrossRef]
- Natural Resources Conservation Service (NRCS). Watersheds, Hydrologic Units, Hydrologic Unit Codes, Watershed Approach, and Rapid Watershed Assessments; USDA Natural Resources Conservation Service: Washington, DC, USA, 2007.
- Iserles, A. A First Course in the Numerical Analysis of Differential Equations; Cambridge University Press: Cambridge, UK, 1996; p. 378. [Google Scholar]
- Liggett, J.A.; Woolhiser, D.A. Difference Solutions of the Shallow-Water Equation; Cornell University Water Resources Center: Ithaca, NY, USA, 1967. [Google Scholar]
- Moussa, R.; Bocquillon, C. Criteria for the choice of flood-routing methods in natural channels. J. Hydrol. 1996, 186, 1–30. [Google Scholar] [CrossRef]
- Getirana, A.; Peters-Lidard, C.; Rodell, M.; Bates, P.D. Trade-off between cost and accuracy in large-scale surface water dynamic modeling. Water Resour. Res. 2017, 53, 4942–4955. [Google Scholar] [CrossRef] [Green Version]
- Durand, M.; Gleason, C.; Garambois, P.A.; Bjerklie, D.; Smith, L.; Roux, H.; Rodriguez, E.; Bates, P.D.; Pavelsky, T.M.; Monnier, J.; et al. An intercomparison of remote sensing river discharge estimation algorithms from measurements of river height, width, and slope. Water Resour. Res. 2016, 52, 4527–4549. [Google Scholar] [CrossRef] [Green Version]
- Pereira, B.; Medeiros, P.; Francke, T.; Ramalho, G.; Foerster, S.; De Araújo, J.C. Assessment of the geometry and volumes of small surface water reservoirs by remote sensing in a semi-arid region with high reservoir density. Hydrol. Sci. J. 2019, 64, 66–79. [Google Scholar] [CrossRef]
- Zheng, X.; Tarboton, D.G.; Maidment, D.R.; Liu, Y.Y.; Passalacqua, P. River channel geometry and rating curve estimation using height above the nearest drainage. J. Am. Water Resour. Assoc. 2018, 54, 785–806. [Google Scholar] [CrossRef]
- Godbout, L.; Zheng, J.Y.; Dey, S.; Eyelade, D.; Maidment, D.; Passalacqua, P. Error Assessment for Height Above the Nearest Drainage Inundation Mapping. JAWRA J. Am. Water Resour. Assoc. 2019, 55, 952–963. [Google Scholar] [CrossRef] [Green Version]
- Ferguson, R.I. Hydraulics and hydraulic geometry. Prog. Phys. Geogr. 1986, 10, 1–31. [Google Scholar] [CrossRef]
- Merigliano, M.F. Hydraulic geometry and stream channel behavior: A uncertain link. JAWRA J. Am. Water Resour. Assoc. 1997, 33, 1327–1336. [Google Scholar] [CrossRef]
- Yu, C.W.; Hodges, B.R.; Liu, F. Supporting Data for Automated Detection of Instability-Inducing Channel Geometry Transitions in Saint-Venant Simulation of Large-Scale River Networks. 2021. Available online: https://dataverse.tdl.org/dataset.xhtml?persistentId=doi:10.18738/T8/IPHYKM (accessed on 24 April 2021).




| Network Name | Channel Length (km) | NHDPlus Flowlines | Computational Nodes | Inflow Boundaries |
|---|---|---|---|---|
| Brazos (A) | 6866 | 2545 | 37,138 | 316 |
| Brazos (B) | 7802 | 2742 | 43,125 | 447 |
| Brazos (C) | 3729 | 1498 | 19,715 | 234 |
| Colorado (A) | 5579 | 1414 | 29,825 | 216 |
| Colorado (B) | 7382 | 3188 | 41,596 | 547 |
| Colorado (C) | 1894 | 758 | 10,594 | 120 |
| Guadalupe | 3367 | 1379 | 18,968 | 236 |
| Lavaca | 1291 | 360 | 6973 | 67 |
| Neches (A) | 4444 | 1968 | 23,943 | 335 |
| Neches (B) | 1517 | 592 | 7892 | 71 |
| Nueces | 8677 | 3226 | 47,221 | 545 |
| Sabine (A) | 3926 | 1676 | 21,782 | 325 |
| Sabine (B) | 1522 | 741 | 7508 | 90 |
| San Antonio | 2733 | 1025 | 15,252 | 199 |
| San Jacinto | 1732 | 690 | 9659 | 116 |
| Trinity (A) | 4900 | 1854 | 27,106 | 339 |
| Trinity (B) | 4157 | 1930 | 23,349 | 345 |
| Trinity (C) | 686 | 249 | 3440 | 35 |
| Case Name | Preprocess Procedure CPU Time (s) | Iteration Procedure CPU Time (s) | SSA Total CPU Time (s) |
|---|---|---|---|
| Lavaca River | 64.42 | 19.55 | 83.97 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, C.-W.; Hodges, B.R.; Liu, F. Automated Detection of Instability-Inducing Channel Geometry Transitions in Saint-Venant Simulation of Large-Scale River Networks. Water 2021, 13, 2236. https://doi.org/10.3390/w13162236
Yu C-W, Hodges BR, Liu F. Automated Detection of Instability-Inducing Channel Geometry Transitions in Saint-Venant Simulation of Large-Scale River Networks. Water. 2021; 13(16):2236. https://doi.org/10.3390/w13162236
Chicago/Turabian StyleYu, Cheng-Wei, Ben R. Hodges, and Frank Liu. 2021. "Automated Detection of Instability-Inducing Channel Geometry Transitions in Saint-Venant Simulation of Large-Scale River Networks" Water 13, no. 16: 2236. https://doi.org/10.3390/w13162236
APA StyleYu, C. -W., Hodges, B. R., & Liu, F. (2021). Automated Detection of Instability-Inducing Channel Geometry Transitions in Saint-Venant Simulation of Large-Scale River Networks. Water, 13(16), 2236. https://doi.org/10.3390/w13162236