
Novel Cosmic Ray Neutron Sensor Accurately Captures Field-Scale Soil Moisture Trends under Heterogeneous Soil Textures



Abstract
:1. Introduction
2. Materials and Methods
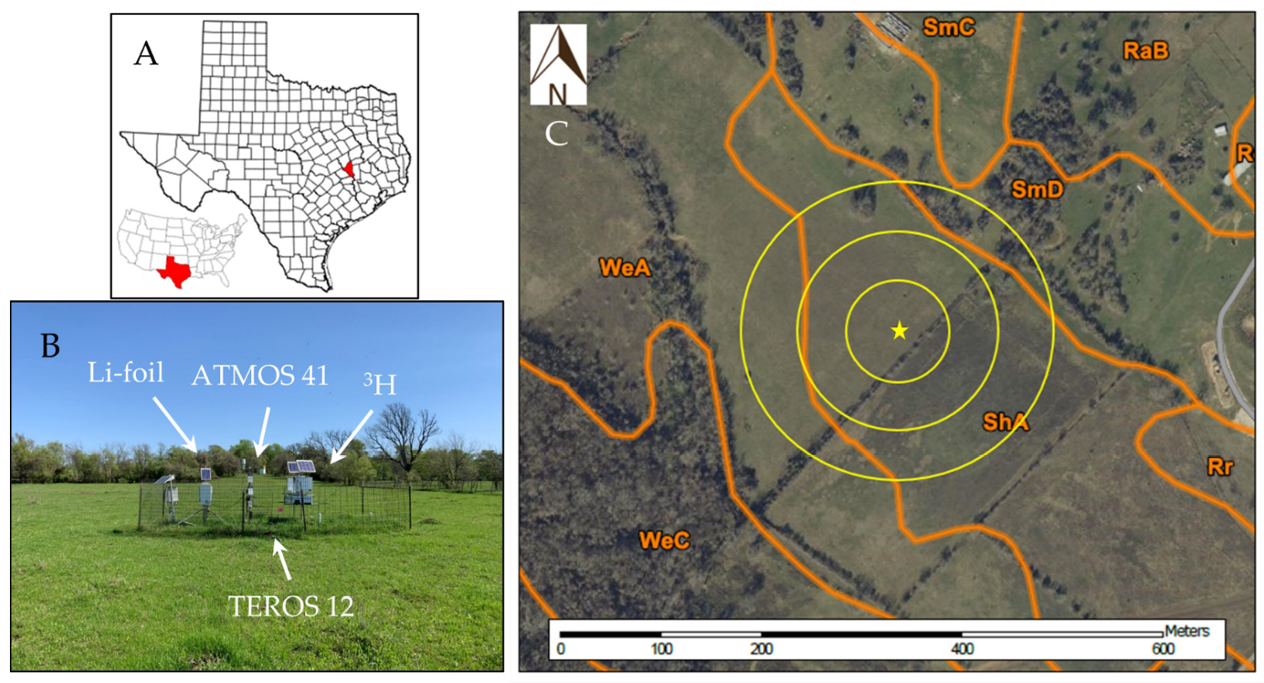
2.1. Site Description
2.2. Sensors and Installation
2.2.1. Neutron Detectors
2.2.2. Atmospheric Sensors
2.2.3. Soil Moisture Sensors
2.3. CRNS Corrections
2.3.1. Correcting Raw Neutron Counts
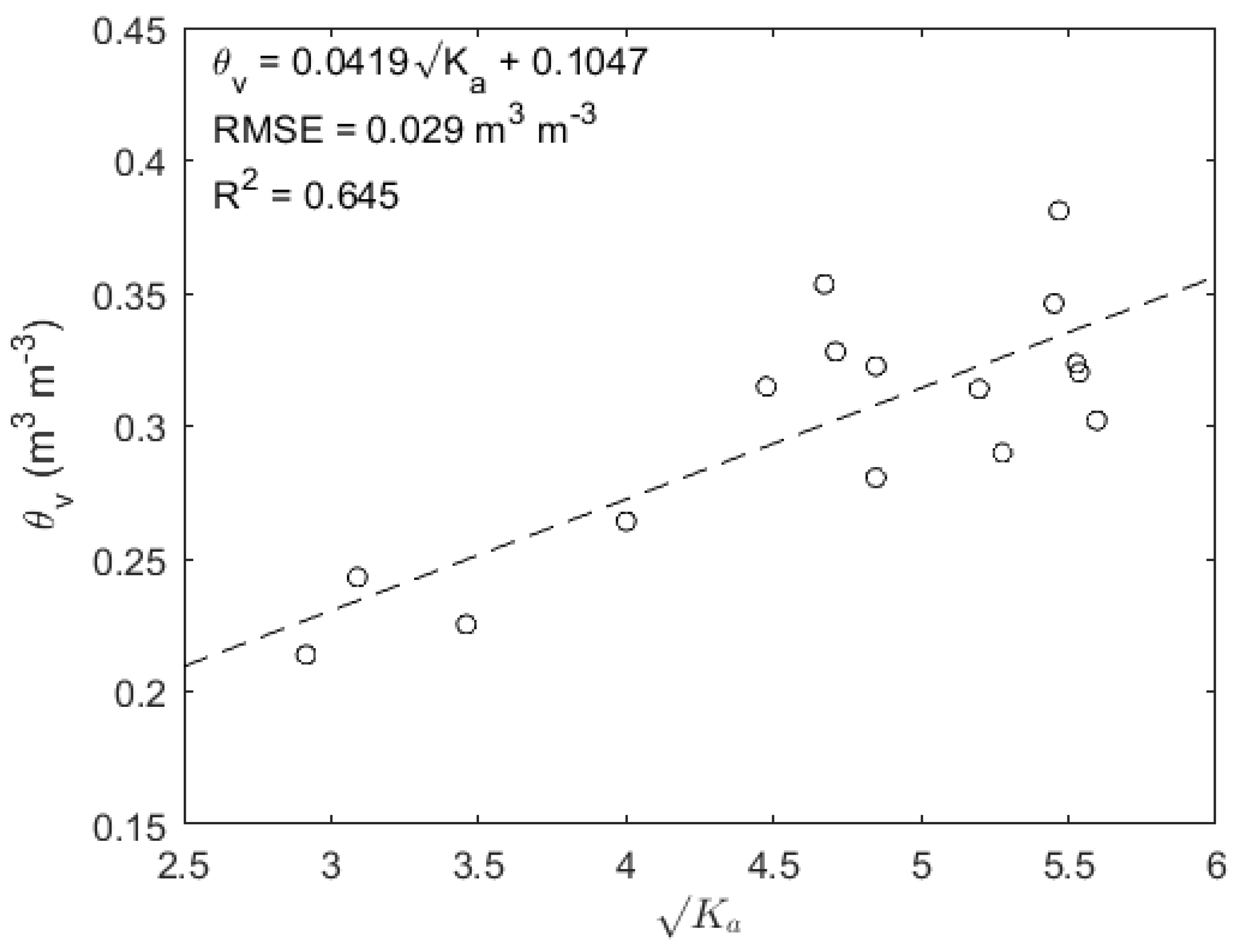
2.3.2. Converting Neutron Counts to Volumetric Soil Water Content
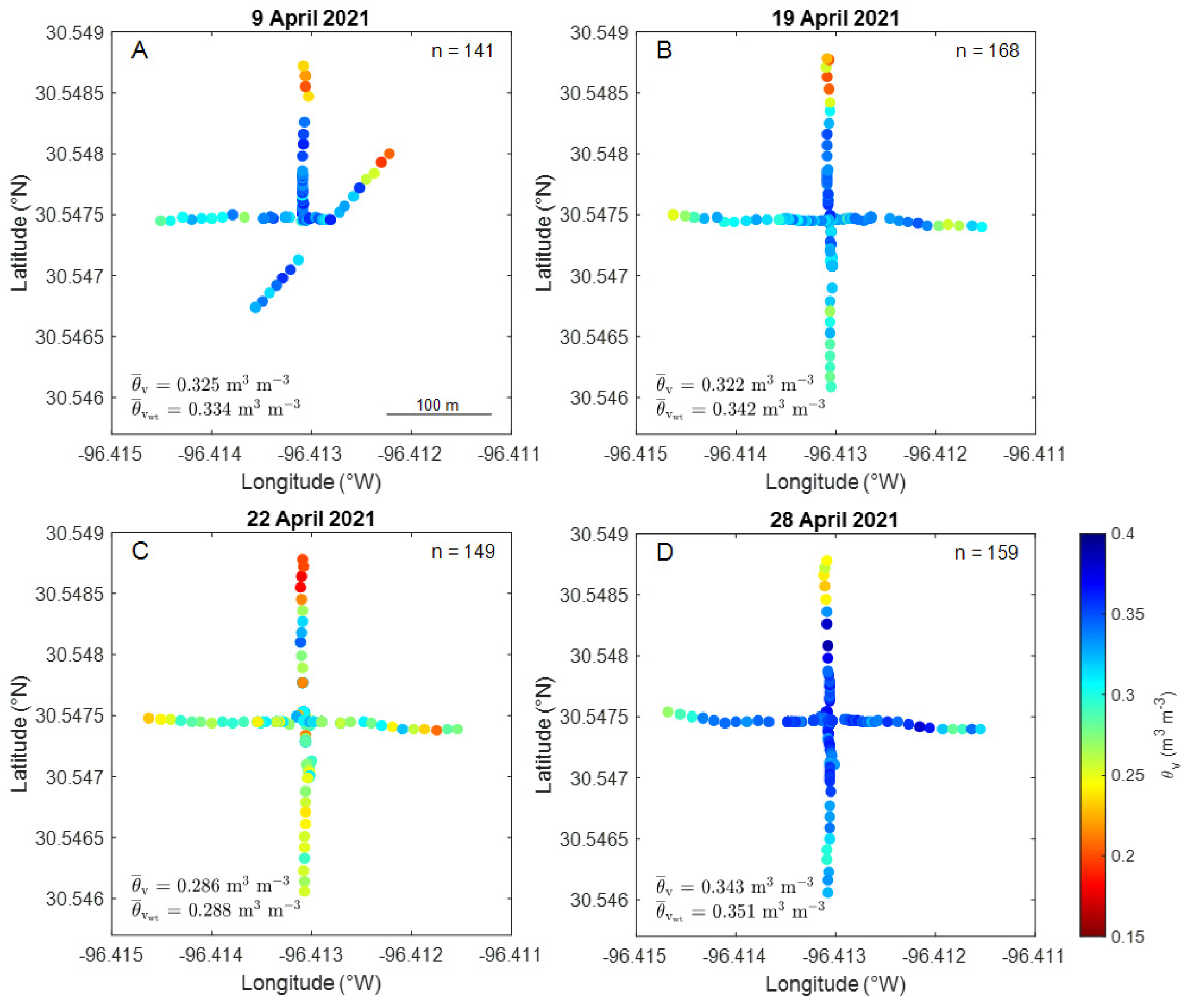
2.4. Field Surveys for Calibration
2.5. Sensing Footprint
3. Results and Discussion
3.1. Field Site Characteristics
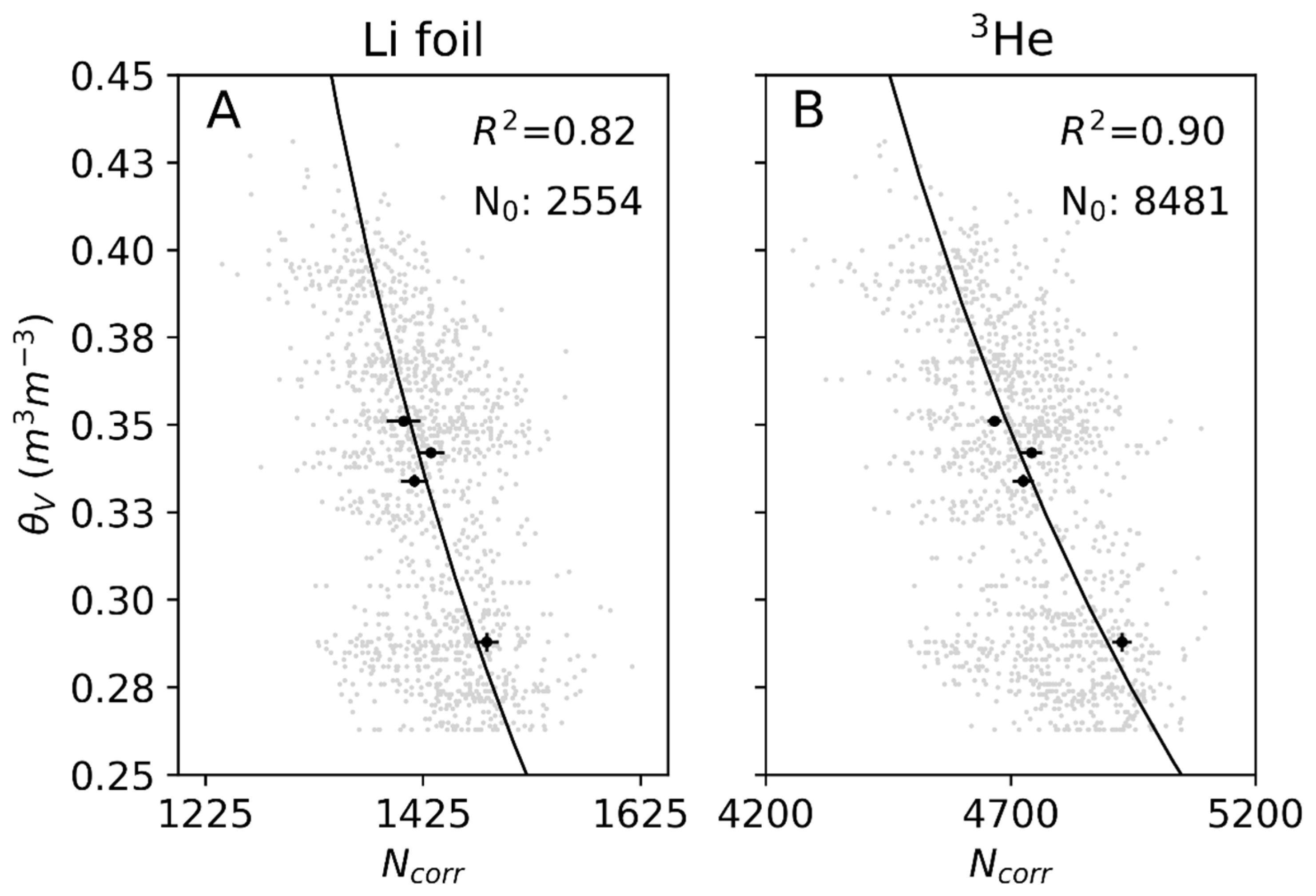
3.2. Calibration
3.3. Corrected Neutron Counts
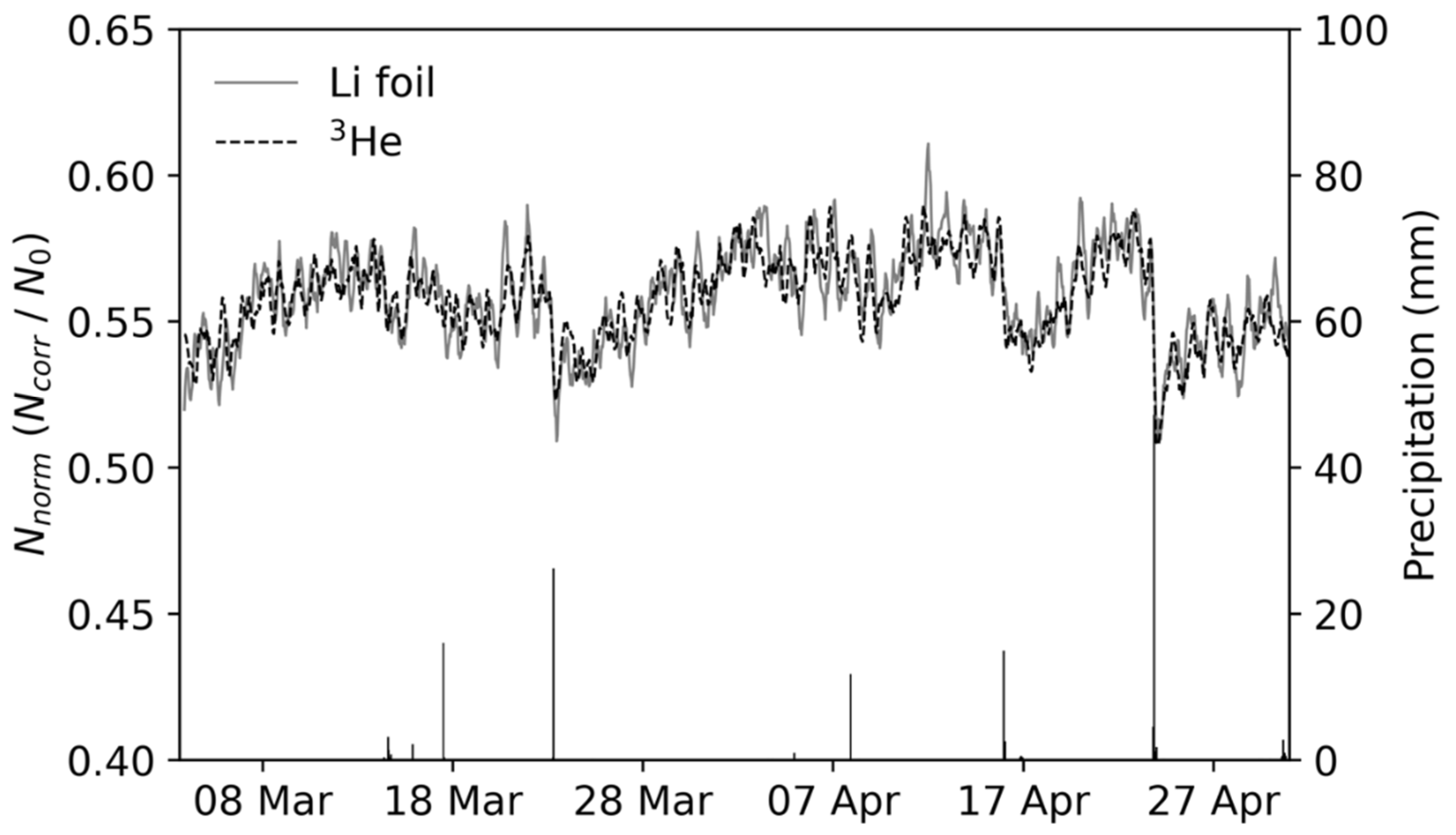
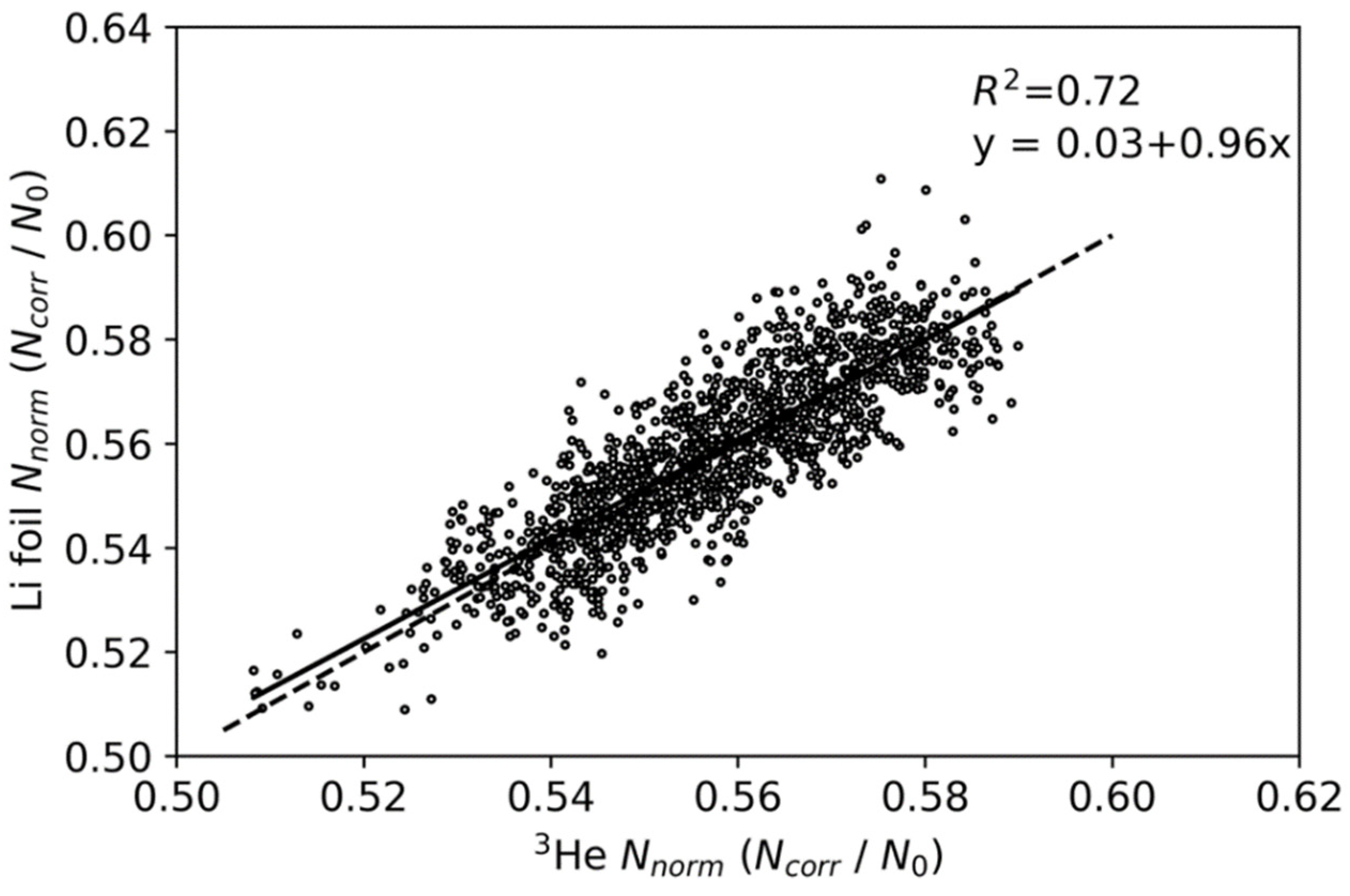
3.4. Normalized Neutron Counts
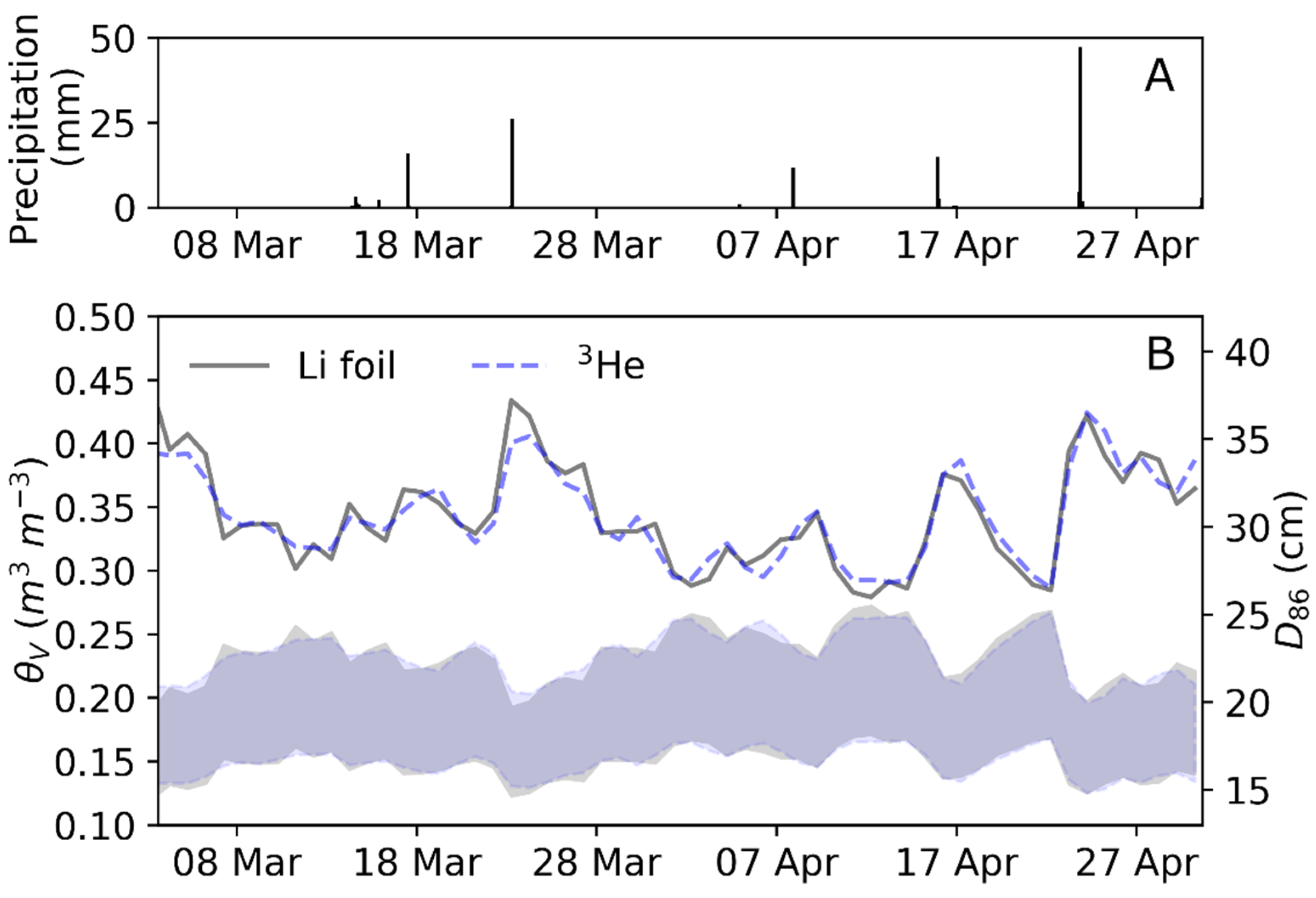
3.5. Sensing Footprint
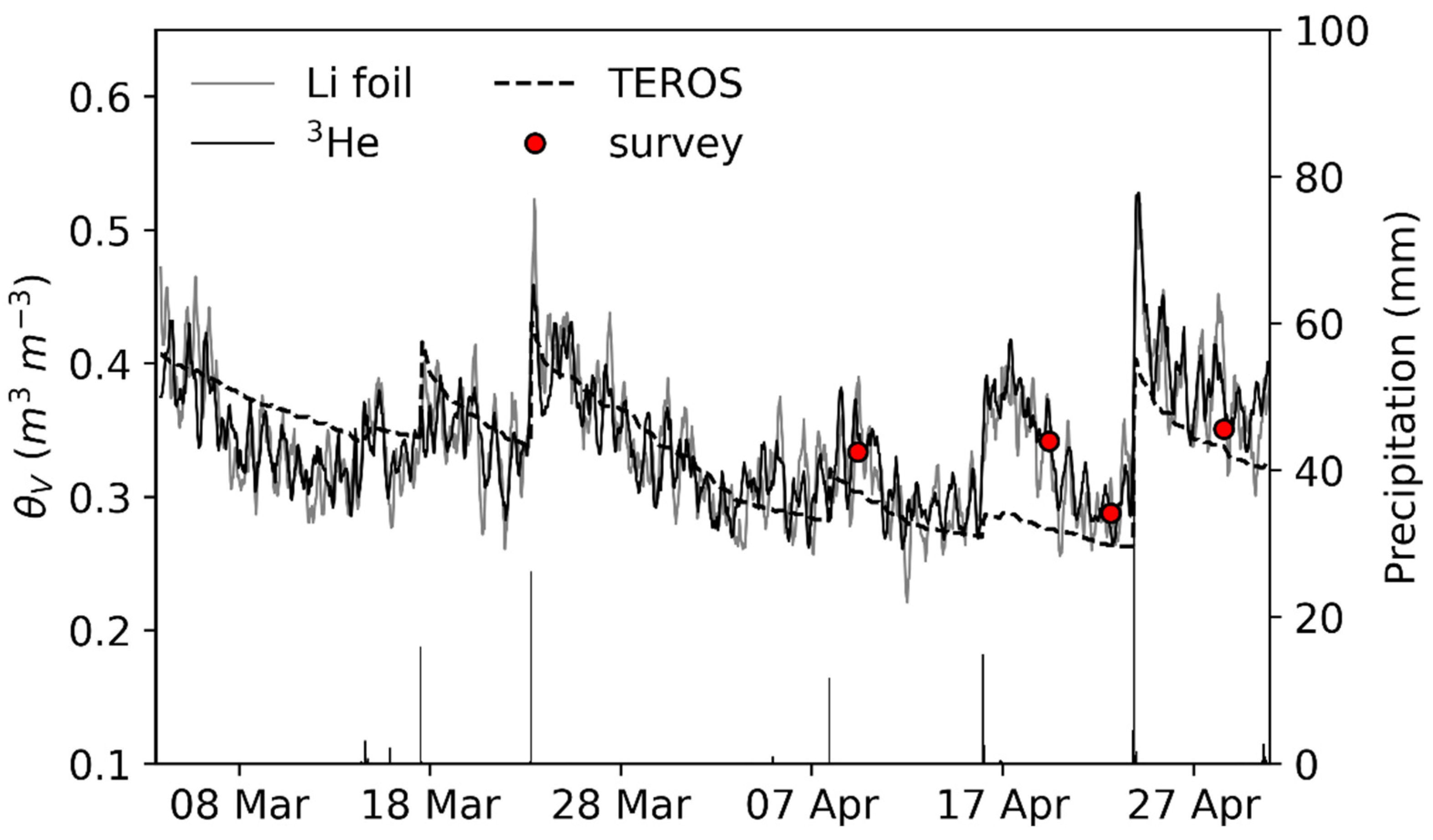
3.6. CRNS-Derived Soil Moisture
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wagner, W.; Blöschl, G.; Pampaloni, P.; Calvet, J.C.; Bizzarri, B.; Wigneron, J.P.; Kerr, Y. Operational readiness of microwave remote sensing of soil moisture for hydrologic applications. Hydrol. Res. 2007, 38, 1–20. [Google Scholar] [CrossRef]
- Wagner, W.; Dorigo, W.; de Jeu, R.; Fernandez, D.; Benveniste, J.; Haas, E.; Ertl, M. Fusion of active and passive microwave observations to create an essential climate variable data record on soil moisture. ISPRS Ann. Photogram. Remote Sens. Spat. Inf. Sci. 2012, I-7, 315–321. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The soil moisture active passive (SMAP) mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Font, J.; Martin-Neira, M.; Mecklenburg, S. ESA’s soil moisture and ocean salinity mission (SMOS)-instrument performance and first results. Trans. Geosci. Remote Sens. 2012, 50, 1351–1715. [Google Scholar] [CrossRef]
- Ochsner, E.; Cosh, M.H.; Cuenca, R.H.; Dorigo, W.A.; Draper, C.S.; Hagimoto, Y.; Kerr, Y.H.; Larson, K.M.; Njoku, E.G.; Small, E.E.; et al. State of the art in large-scale soil moisture monitoring. Soil Sci. Soc. Am. J. 2013, 77, 1888–1919. [Google Scholar] [CrossRef] [Green Version]
- Zreda, M.; Desilets, D.; Ferré, T.P.A.; Scott, R.L. Measuring soil moisture content non-invasively at intermediate spatial scale using cosmic-ray neutrons. Geophys. Res. Lett. 2008, 35, L21402. [Google Scholar] [CrossRef] [Green Version]
- Köhli, M.; Schrön, M.; Zreda, M.; Schmidt, U.; Dietrich, P.; Zacharias, S. Footprint characteristics revised for field-scale soil moisture monitoring with cosmic-ray neutrons. Water Resour. Res. 2015, 51, 5772–5790. [Google Scholar] [CrossRef] [Green Version]
- Zreda, M.; Shuttleworth, W.J.; Zeng, X.; Zweck, C.; Desilets, D.; Franz, T.; Rosolem, R. COSMOS: The cosmic-ray soil moisture observing system. Hydrol. Earth Sys. Sci. 2012, 16, 4079–4099. [Google Scholar] [CrossRef] [Green Version]
- Krane, K.S.; Halliday, D. Introductory Nuclear Physics; John Wiley & Sons, Inc.: New York, NY, USA, 1988; pp. 204–206. [Google Scholar]
- Kouzes, R.T. The 3He Supply Problem; Report No. PNNL-18388; Pacific Northwest National Lab (PNNL): Richland, WA, USA, 2009.
- Nelson, K.A.; Bellinger, S.L.; Montag, B.W.; Neihard, J.L.; Riedel, T.A.; Schmidt, A.; McGregor, D.S. Investigation of a lithium foil multi-wire proportional counter for potential 3He replacement. Nucl. Inst. Meth. Phys. Res. Sec. A Accel. Spectrometers Detect. Assoc. Equip. 2012, 669, 79–84. [Google Scholar] [CrossRef]
- Stevanato, L.; Baroni, G.; Cohen, Y.; Fontana, C.L.; Gatto, S.; Lunardon, M.; Marinello, F.; Moetto, S.; Morselli, L. A novel cosmic-ray neutron sensor for soil moisture estimation over large areas. Agriculture 2019, 9, 202. [Google Scholar] [CrossRef] [Green Version]
- Stevanato, L.; Polo, M.; Lunardon, M.; Marinello, F.; Moretto, S.; Baroni, G. Towards the optimization of a scintillator-based neutron detector for large non-invasive soil moisture estimation. In Proceedings of the 2020 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Trento, Italy, 4–6 November 2020. [Google Scholar] [CrossRef]
- Weimar, J.; Köhli, M.; Budach, C.; Schmidt, U. Large-scale boron-lined neutron detection systems as a 3He alternative for Cosmic Ray Neutron Sensing. Front. Water 2020, 2, 16. [Google Scholar] [CrossRef]
- Montag, B.W.; Bellinger, S.L.; Edwards, N.S.; Lage, J.; Nelson, K.A.; Henson, L.C.; McGregor, D.S. Recent progress in the commercialization of the Li Foil multi-wire proportional counter neutron detectors. Rad. Phys. Chem. 2019, 155, 158–163. [Google Scholar] [CrossRef]
- Dimitrova-Petrova, K.; Geris, J.; Wilkenson, M.E.; Rosolem, R.; Verrot, L.; Lilly, A.; Soulsby, C. Opportunities and challenges in using catchment-scale storage estimates from cosmic ray neutron sensors for rainfall-runoff modelling. J. Hydrol. 2020, 586, 124878. [Google Scholar] [CrossRef]
- Barker, J.B.; Franz, T.E.; Heeren, D.M.; Neale, C.M.; Luck, J.D. Soil water content monitoring for irrigation management: A geostatistical analysis. Agric. Water Manag. 2017, 188, 36–49. [Google Scholar] [CrossRef] [Green Version]
- Pang, Z.; Jia, U.; Peng, X.; Ju, X.; Gau, L. Applicability of cosmic-ray neutron sensing for measuring soil water content in heterogeneous landscapes under subtropical hydroclimatic conditions. J. Hydrol. 2021, 596, 126068. [Google Scholar] [CrossRef]
- Rasche, D.; Köhli, M.; Schrön, M.; Blume, T.; Güntner, A. Towards disentangling heterogeneous soil moisture patterns in cosmic-ray neutron sensor footprints. Hydrol. Earth Sys. Sci. Discuss. 2021, 1–33. [Google Scholar] [CrossRef]
- Soil Survey Staff; Natural Resources Conservation Service; United States Department of Agriculture. Web Soil Survey. Available online: http://websoilsurvey.sc.egov.usda.gov/ (accessed on 6 October 2021).
- Hawdon, A.; McJannet, D.; Wallace, J. Calibration and correction procedures for cosmic-ray neutron soil moisture probes located across Australia. Water Resour. Res. 2014, 50, 5029–5043. [Google Scholar] [CrossRef]
- Rosolem, R.; Shuttleworth, W.J.; Zreda, M.; Franz, T.E.; Zeng, X.; Kurc, S.A. The effect of atmospheric water vapor on neutron count in the cosmic-ray soil moisture observing system. J. Hydrometeor. 2013, 14, 1659–1671. [Google Scholar] [CrossRef] [Green Version]
- Franz, T.E.; Wahbi, A.; Zhang, J.; Vreugdenhil, M.; Heng, L.; Dercon, G.; Strauss, P.; Brocca, L.; Wagner, W. Practical data products from cosmic-ray neutron sensing for hydrological applications. Front. Water 2020, 2. [Google Scholar] [CrossRef] [Green Version]
- Desilets, D.; Zreda, M.; Ferré, T.P.A. Nature’s neutron probe: Land surface hydrology at an elusive scale with cosmic rays. Water Resour. Res. 2010, 46, W11505. [Google Scholar] [CrossRef]
- Dong, J.; Ochsner, T.E.; Zreda, M.; Cosh, M.H.; Zou, C.B. Calibration and validation of the COSMOS rover for surface soil moisture measurement. Vadose Zone J. 2014, 13, vzj2013.08.0148. [Google Scholar] [CrossRef] [Green Version]
- Baatz, R.; Bogena, H.R.; Franssen, H.-J.H.; Huisman, J.A.; Montzka, C.; Vereecken, H. An empirical vegetation correction for soil water content quantification using cosmicc ray probes. Water Resour. Res. 2015, 51, 2030–2046. [Google Scholar] [CrossRef] [Green Version]
- Hunter, J.D. Matplotlib: A 2D graphics environment. Environ. Comp. Sci. Eng. 2007, 9, 90–95. [Google Scholar] [CrossRef]
- Harris, C.R.; Millman, K.J.; van der Walt, S.J.; Bommers, R.; Viranen, P.; Cournapeau, D.; Wieser, E.; Taylor, J.; Berg, S.; Smith, N.J.; et al. Array programming with NumPy. Nature 2020, 585, 357–362. [Google Scholar] [CrossRef] [PubMed]
- McKinney, W. Data Structures for Statistical Computing in Python. In Proceedings of the 9th Python in Science Conference (SciPy 2010), Austin, TX, USA, 28 June–3 July 2010; pp. 51–56. [Google Scholar] [CrossRef] [Green Version]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 12, 261–272. [Google Scholar] [CrossRef] [Green Version]
- Cosh, M.H.; Jackson, T.J.; Bindlish, R.; Famiglietti, J.S.; Ryu, D. Calibration of an impedance probe for estimation of surface soil water content over large regions. J. Hydrol. 2005, 311, 49–58. [Google Scholar] [CrossRef] [Green Version]
- Patrignani, A.; Ochsner, T.E.; Montag, B.; Bellinger, S. A novel lithium foil cosmic-ray neutron detector for measuring field-scale soil moisture. Front. Water 2021, 3, 673185. [Google Scholar] [CrossRef]
- Nguyen, H.H.; Kim, H.; Choi, M. Evaluation of the soil water content using cosmic-ray neutron probe in a heterogeneous monsoon climate-dominated region. Adv. Water Resour. 2017, 108, 125–138. [Google Scholar] [CrossRef]
- Bogena, H.R.; Huisman, J.A.; Baatz, R.; Franssen, H.J.H.; Vereecken, H. Accuracy of the cosmic-ray soil water content probe in humid forest ecosystems: The worst case scenario. Water Resour. Res. 2013, 49, 5778–5791. [Google Scholar] [CrossRef] [Green Version]
- Franz, T.E.; Zreda, M.; Rosolem, R.; Ferre, T.P.A. Field validation for a cosmic-ray neutron sensor using a distributed sensor network. Vadose Zone J. 2012, 11, vzj2012.0046. [Google Scholar] [CrossRef] [Green Version]
- Knoll, G.F. Radiation Detection and Measurement, 3rd ed.; John Wiley & Sons, Inc.: New York, NY, USA, 2000; pp. 95–103. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Sand | Clay | Textural Class |
|---|---|---|---|
| % | % | – | |
| Center | 18.8 | 31.2 | SiCL |
| North 100 m | 35.7 | 28.7 | CL |
| East 100 m | 25.0 | 37.5 | CL |
| South 100 m | 15.7 | 27.5 | SiCL |
| West 100 m | 16.6 | 26.9 | SiL |
| North 150 m | 81.5 | 5.0 | LS |
| East 150 m | 47.5 | 27.5 | SCL |
| South 150 m | 17.5 | 25.0 | SCL |
| West 150 m | 25 | 17.5 | SiL |
| Date | n | R86 | |||
|---|---|---|---|---|---|
| m3 m−3 | m3 m−3 | g m−3 | m | ||
| 9 April 2021 | 141 | 0.325 (0.035) | 0.334 (0.021) | 16.2 (0.516) | 140 |
| 19 April 2021 | 168 | 0.322 (0.029) | 0.342 (0.015) | 10.2 (0.348) | 151 |
| 22 April 2021 | 149 | 0.286 (0.035) | 0.288 (0.033) | 11.0 (0.222) | 154 |
| 28 April 2021 | 159 | 0.343 (0.026) | 0.351 (0.014) | 19.7 (0.303) | 135 |
| N0 | N−0.5 | CV | |||
|---|---|---|---|---|---|
| Counts h−1 | Counts h−1 | Counts h−1 | % | % | |
| Li foil 1 | 445 | 483 | 879 | 4.5 | 8.4 |
| Li foil 2 | 463 | 503 | 889 | 4.5 | 7.9 |
| Li foil 3 | 406 | 441 | 782 | 4.8 | 7.6 |
| All Li foil | 1315 | 1427 | 2554 | 2.6 | 4.9 |
| 3He | 4360 | 4730 | 8481 | 1.5 | 3.8 |
| Sensors | MAD |
|---|---|
| m3 m−3 | |
| Li foil vs. 3He | 0.020 |
| Li foil vs. TEROS 12 | 0.032 |
| 3He vs. TEROS 12 | 0.031 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Flynn, K.D.; Wyatt, B.M.; McInnes, K.J. Novel Cosmic Ray Neutron Sensor Accurately Captures Field-Scale Soil Moisture Trends under Heterogeneous Soil Textures. Water 2021, 13, 3038. https://doi.org/10.3390/w13213038
Flynn KD, Wyatt BM, McInnes KJ. Novel Cosmic Ray Neutron Sensor Accurately Captures Field-Scale Soil Moisture Trends under Heterogeneous Soil Textures. Water. 2021; 13(21):3038. https://doi.org/10.3390/w13213038
Chicago/Turabian StyleFlynn, Kade D., Briana M. Wyatt, and Kevin J. McInnes. 2021. "Novel Cosmic Ray Neutron Sensor Accurately Captures Field-Scale Soil Moisture Trends under Heterogeneous Soil Textures" Water 13, no. 21: 3038. https://doi.org/10.3390/w13213038
APA StyleFlynn, K. D., Wyatt, B. M., & McInnes, K. J. (2021). Novel Cosmic Ray Neutron Sensor Accurately Captures Field-Scale Soil Moisture Trends under Heterogeneous Soil Textures. Water, 13(21), 3038. https://doi.org/10.3390/w13213038