
Block-Greedy and CNN Based Underwater Image Dehazing for Novel Depth Estimation and Optimal Ambient Light

 ,
,  ,
,  ,
, 
Abstract
:1. Introduction
- To estimate the scene depth based on the pixel differences between the color channels, helping strengthen the scene artifacts of the final dehazed underwater images.
- To transform the local and global pixels for the purpose of reducing discontinuity, which increase the accuracy of the dehazed images, and preserves and improves the color hue.
- To correct the discontinuity often exhibited in underwater images by continuous splitting invariance of the image pixels drawn from local and global pixels.
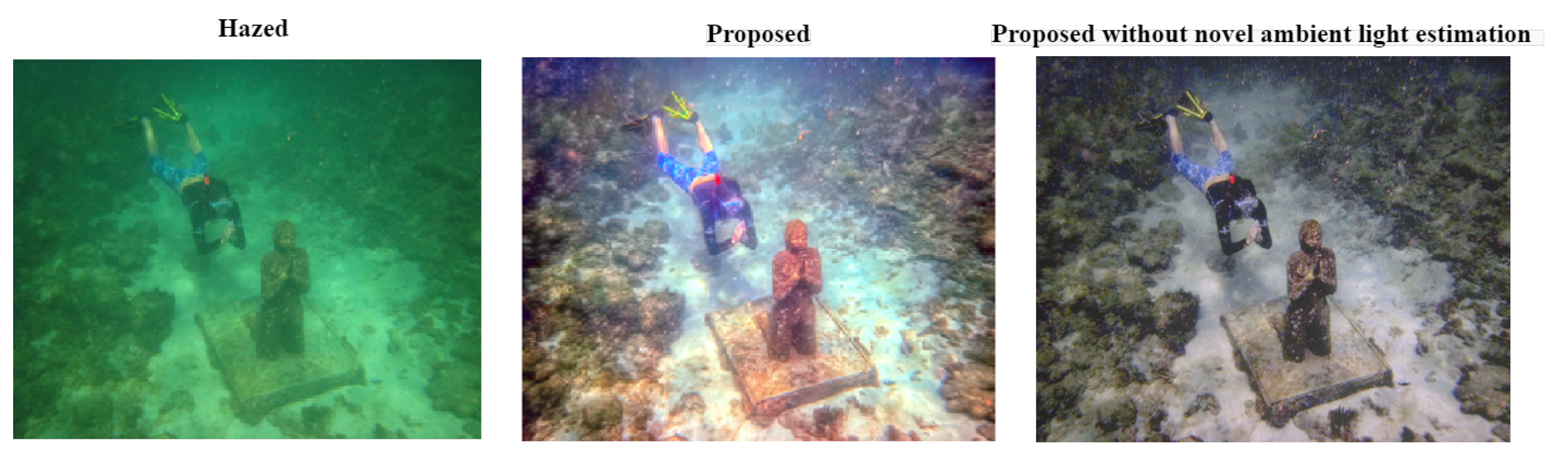
- To estimate the ambient light based on the brightest pixels from all color channels.
2. Literature Review
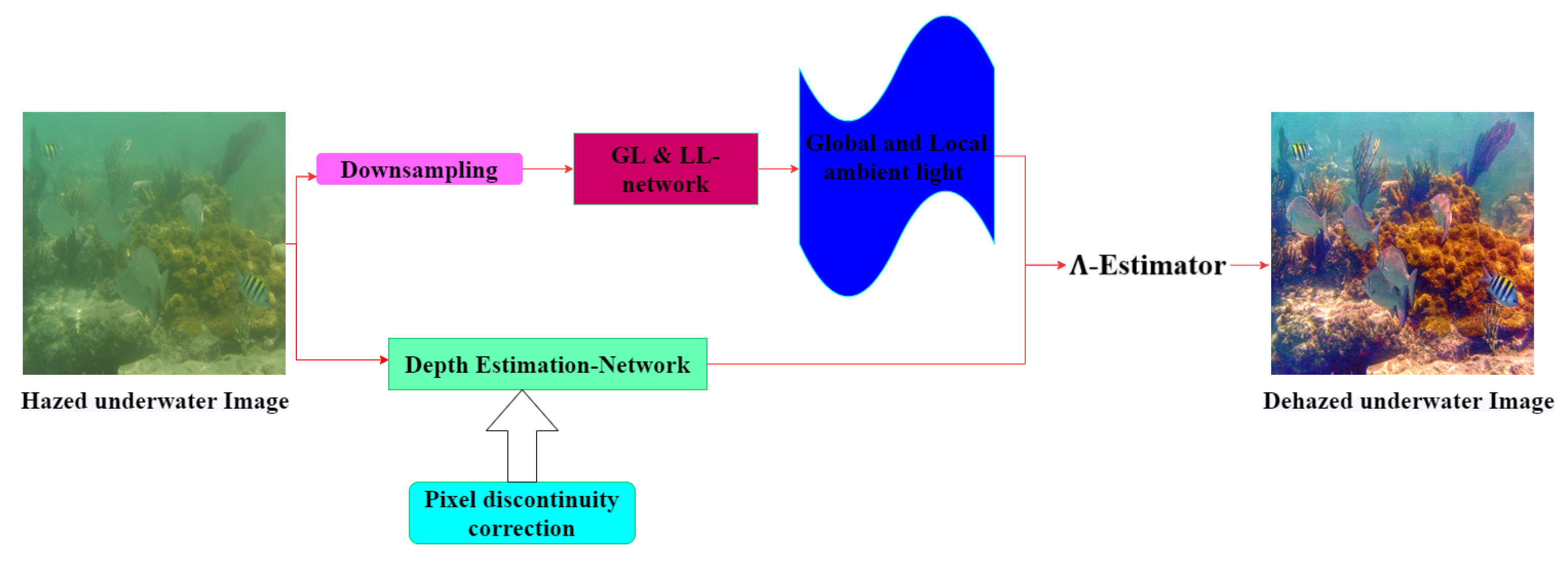
3. Proposed Work
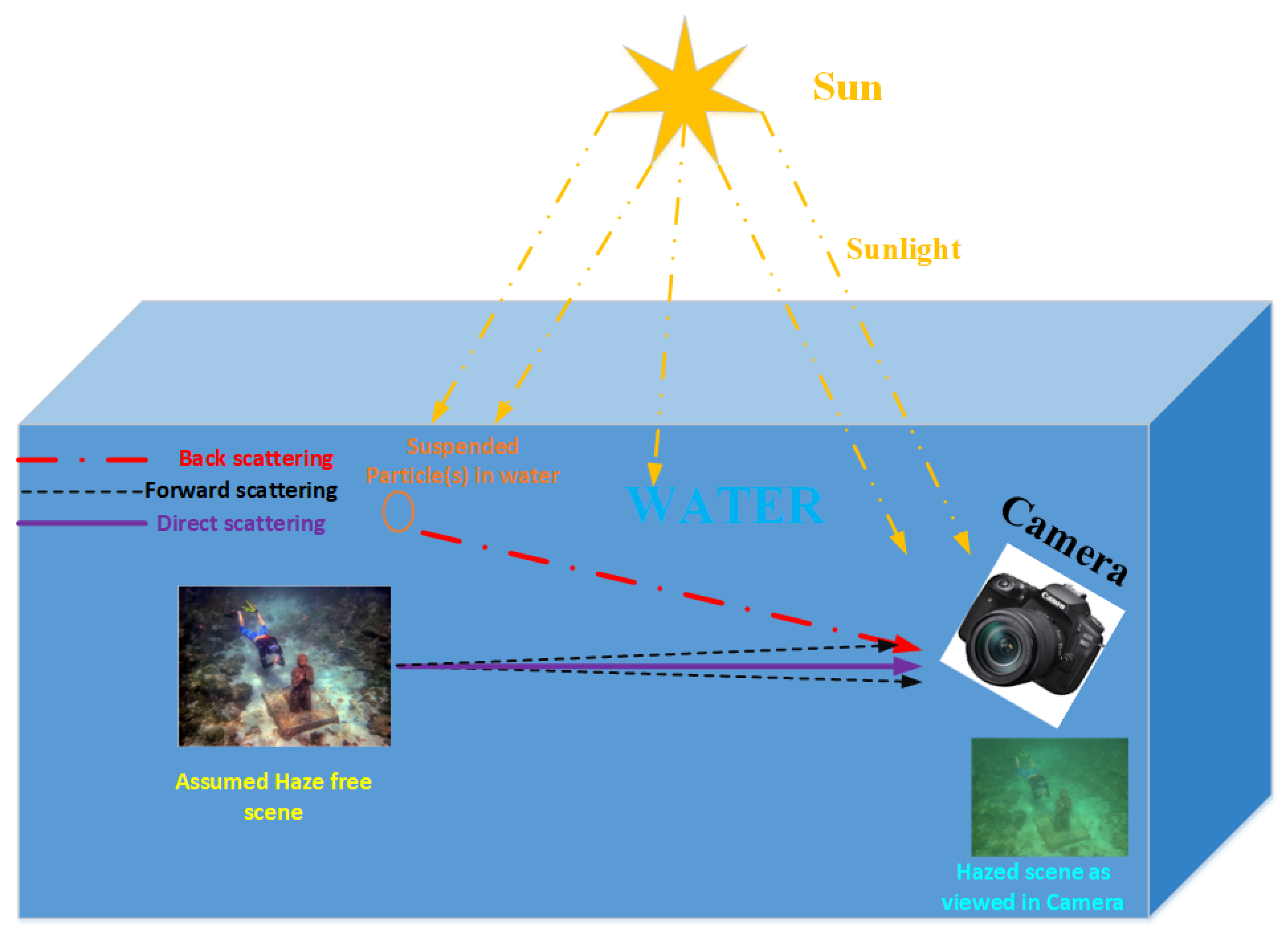
3.1. Underwater Image Formation Model
3.2. Scene Depth Estimation and Global Background Light
3.2.1. Scene Depth Estimation
3.2.2. Global Background Light
| Algorithm 1: Algorithm for (14). |
| Input: Underwater image in |
| Output: Ambient light out |
| Initialisation: |
| 1: Let |
| |
| 2: |
| 3: Subject to |
| 4: Compute |
3.3. Discontinuity of Pixels
3.4. Underwater Image Restoration
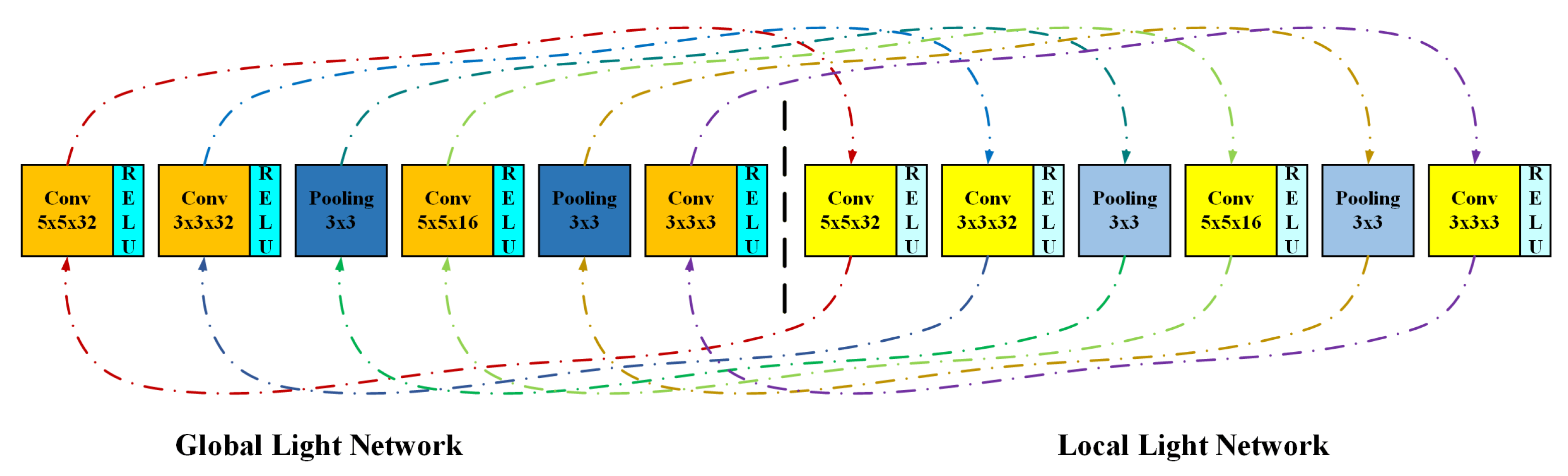
3.4.1. Global Light and Local Light Network
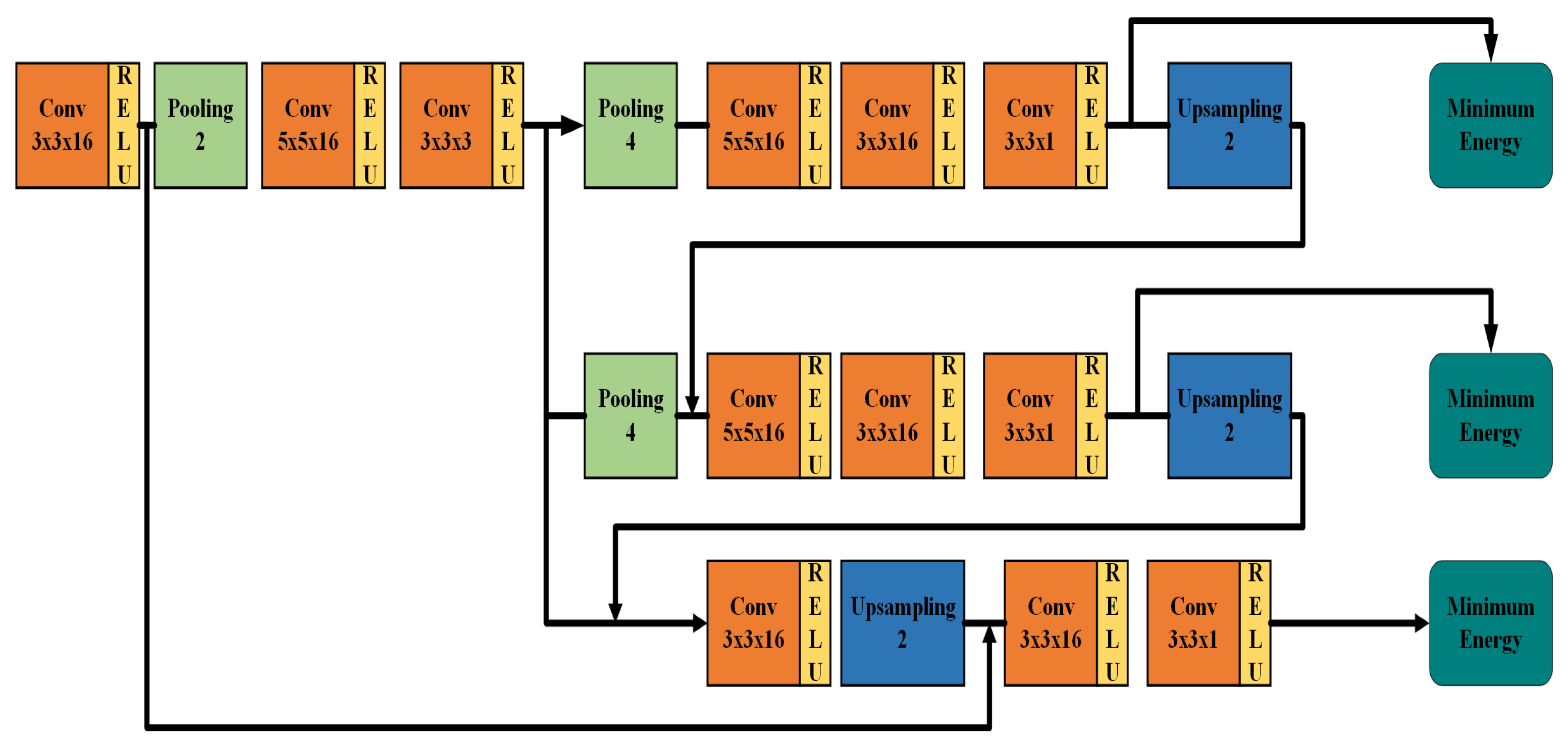
3.4.2. Depth Estimation Network
3.4.3. Minimum Energy
3.4.4. -Estimator
4. Experiments
4.1. Data and Implementation
4.2. Evaluation Metrics
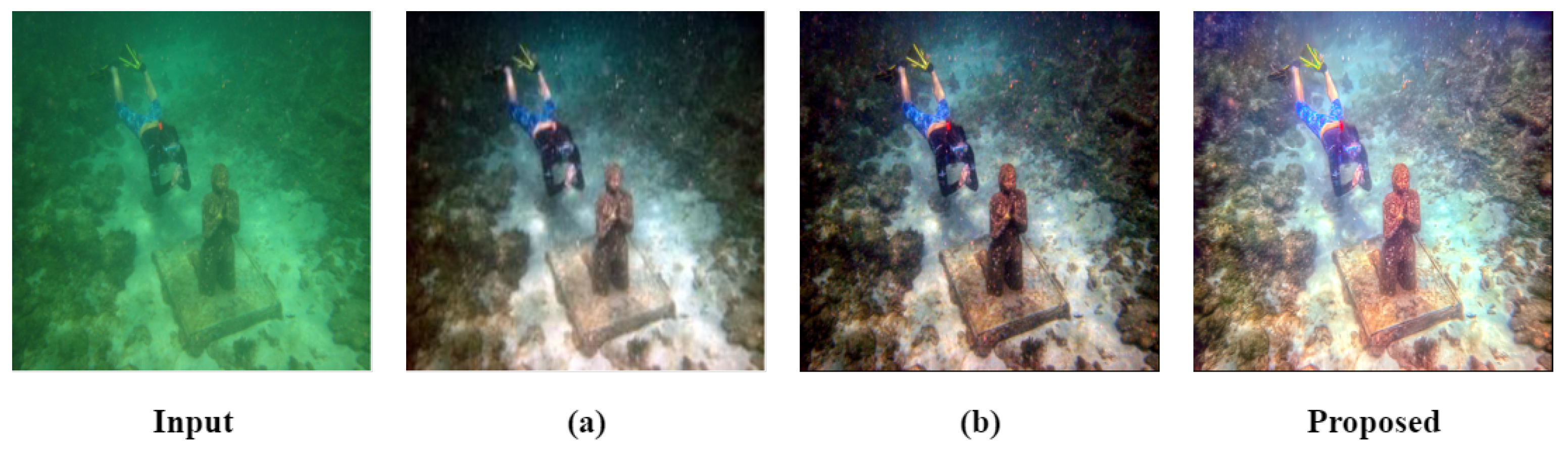
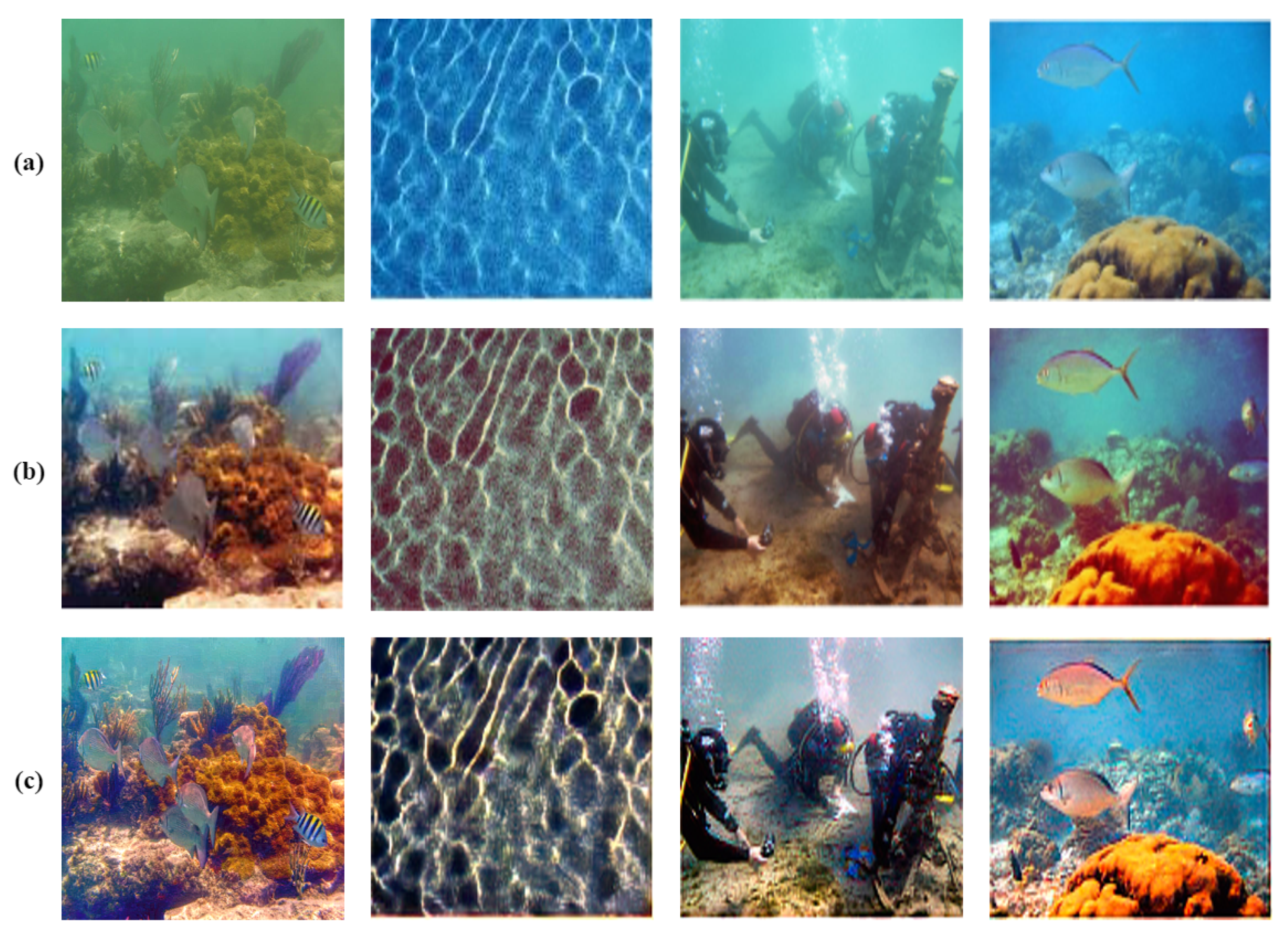
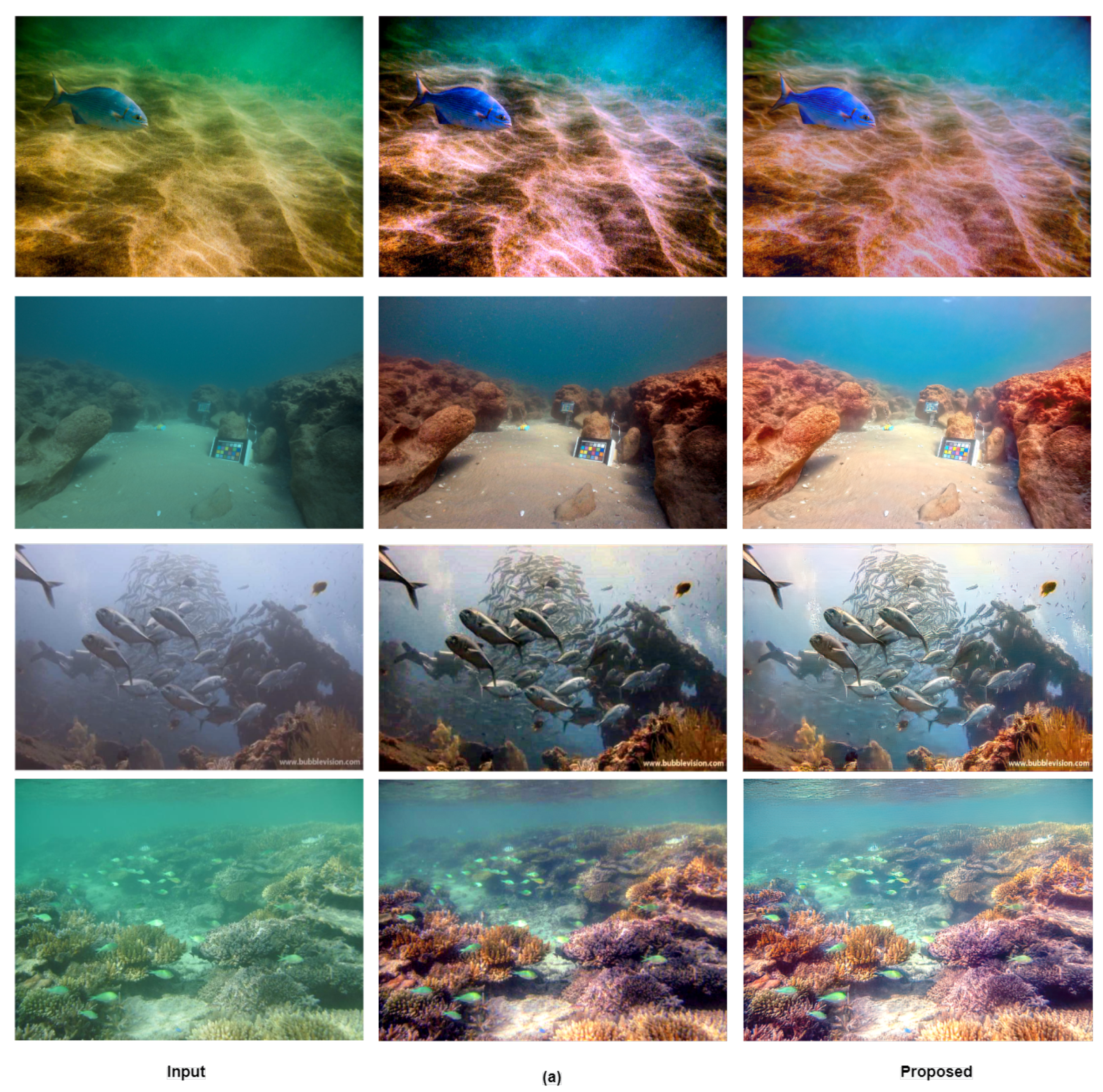
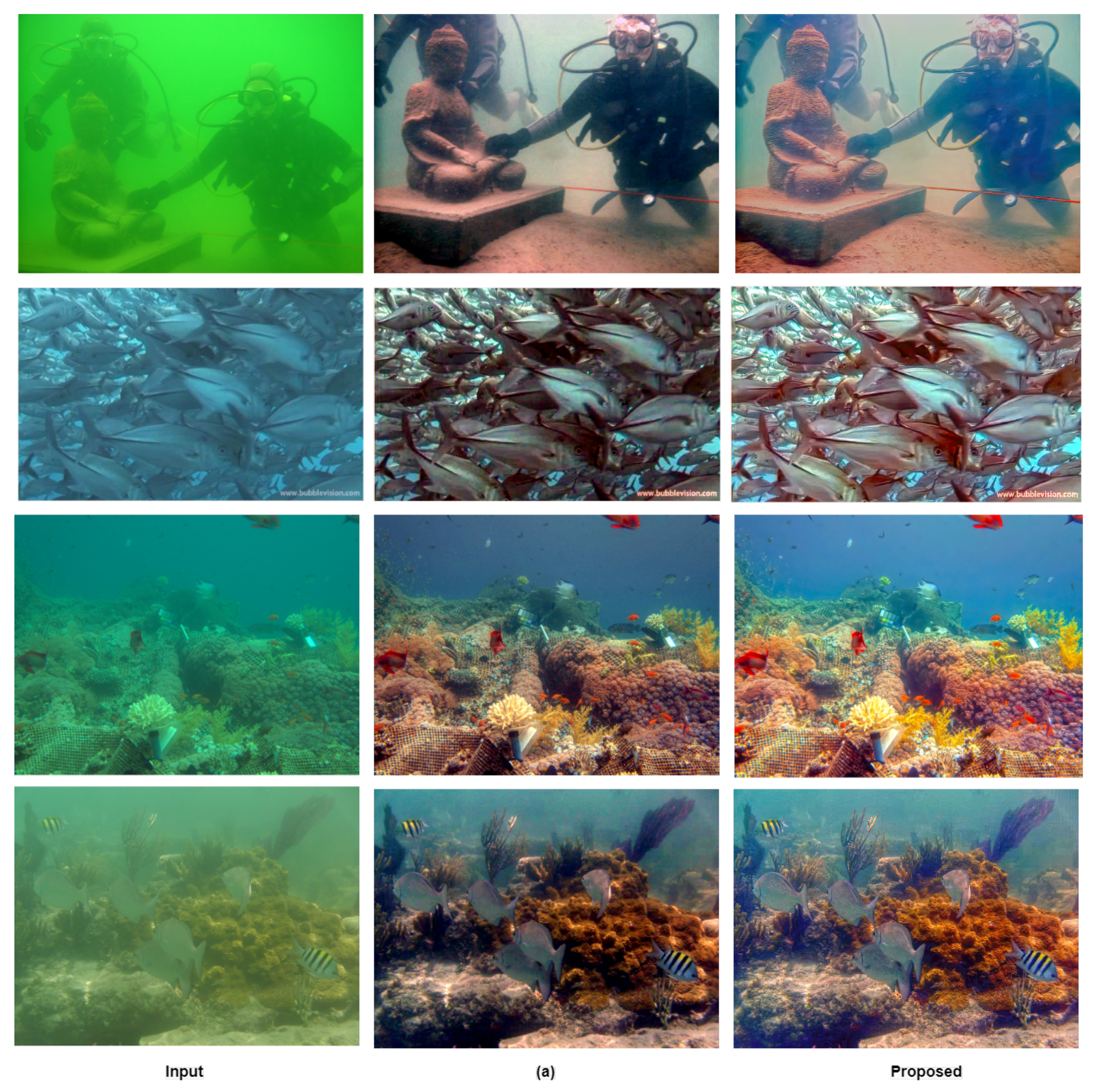
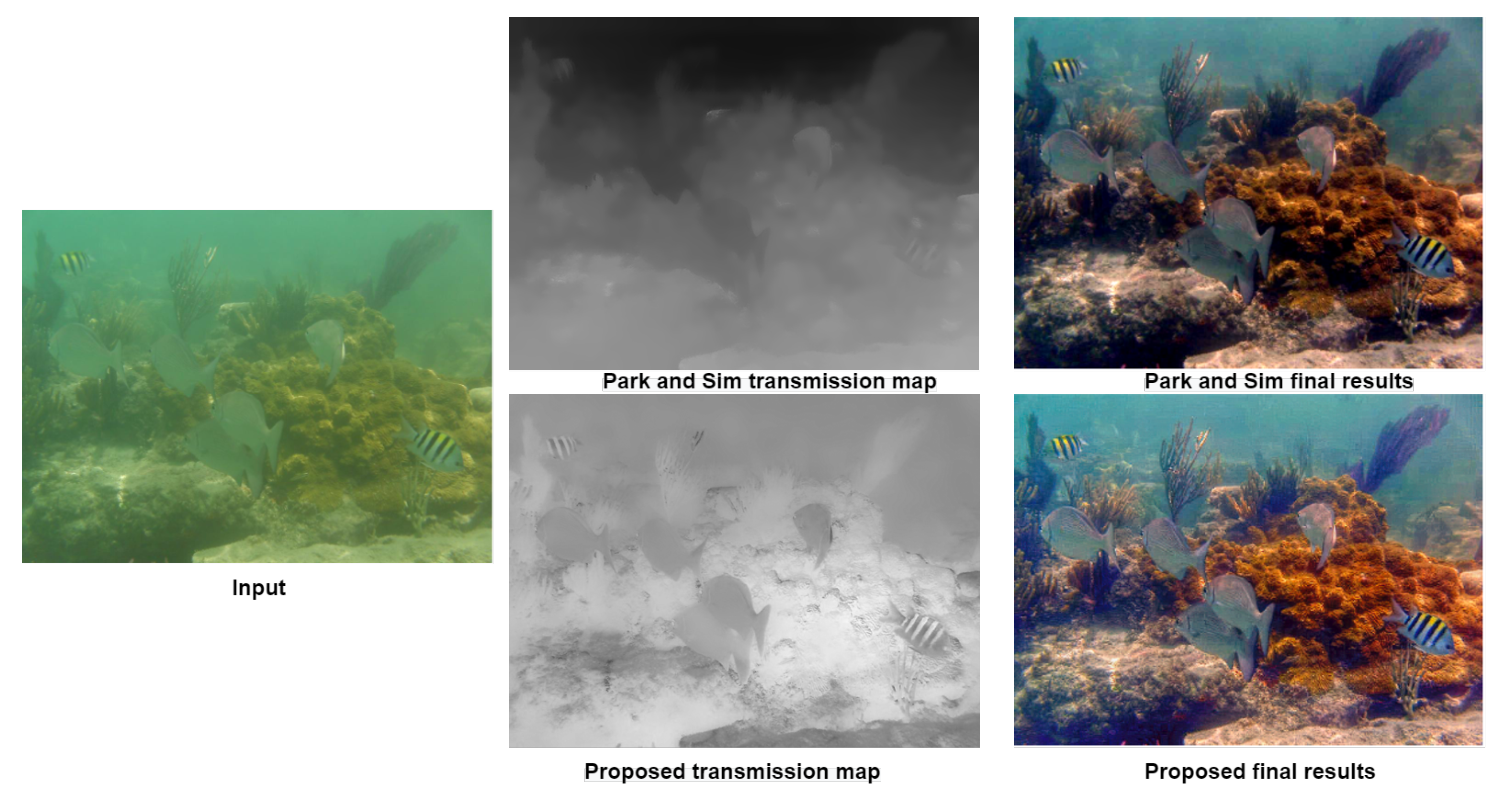
4.3. Results Analysis and Comparison
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Luo, Y.; Jiao, H.; Qi, L.; Dong, J.; Zhang, S.; Yu, H. Augmenting depth estimation from deep convolutional neural network using multi-spectral photometric stereo. In Proceedings of the 2017 IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computed, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), San Francisco, CA, USA, 4–8 August 2017; pp. 1–6. [Google Scholar]
- Wang, H.; Li, X.; Jhaveri, R.H.; Gadekallu, T.R.; Zhu, M.; Ahanger, T.A.; Khowaja, S.A. Sparse Bayesian learning based channel estimation in FBMC/OQAM industrial IoT networks. Comput. Commun. 2021, 176, 40–45. [Google Scholar] [CrossRef]
- Tiwari, P.; Zhu, H.; Pandey, H.M. DAPath: Distance-aware knowledge graph reasoning based on deep reinforcement learning. Neural Netw. 2021, 135, 1–12. [Google Scholar] [CrossRef]
- Jhaveri, R.; Sagar, R.; Srivastava, G.; Gadekallu, T.R.; Aggarwal, V. Fault-resilience for bandwidth management in industrial software-defined networks. IEEE Trans. Netw. Sci. Eng. 2021. [Google Scholar] [CrossRef]
- Dhanamjayulu, C.; Nizhal, U.; Maddikunta, P.K.R.; Gadekallu, T.R.; Iwendi, C.; Wei, C.; Xin, Q. Identification of malnutrition and prediction of BMI from facial images using real-time image processing and machine learning. IET Image Process. 2021. [Google Scholar] [CrossRef]
- Patel, H.; Singh Rajput, D.; Thippa Reddy, G.; Iwendi, C.; Kashif Bashir, A.; Jo, O. A review on classification of imbalanced data for wireless sensor networks. Int. J. Distrib. Sens. Netw. 2020, 16, 1550147720916404. [Google Scholar] [CrossRef]
- Tiwari, P.; Uprety, S.; Dehdashti, S.; Hossain, M.S. TermInformer: Unsupervised term mining and analysis in biomedical literature. Neural Comput. Appl. 2020, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Iwendi, C.; Rehman, S.U.; Javed, A.R.; Khan, S.; Srivastava, G. Sustainable Security for the Internet of Things Using Artificial Intelligence Architectures. ACM Trans. Internet Technol. (TOIT) 2021, 21, 1–22. [Google Scholar] [CrossRef]
- Latif, S.A.; Wen, F.B.X.; Iwendi, C.; Li-li, F.W.; Mohsin, S.M.; Han, Z.; Band, S.S. AI-empowered, blockchain and SDN integrated security architecture for IoT network of cyber physical systems. Comput. Commun. 2021, 181, 274–283. [Google Scholar] [CrossRef]
- Alenezi, F.; Salari, E. A Fuzzy-Based Medical Image Fusion Using a Combination of Maximum Selection And Gabor Filters. Int. J. Eng. Sci. 2018, 9, 118–129. [Google Scholar]
- Alenezi, F.; Salari, E. Novel Technique for Improved Texture and Information Content of Fused Medical Images. In Proceedings of the IEEE International Symposium on Signal Processing and Information Technology (ISSPIT), Louisville, KY, USA, 6–8 December 2018; pp. 348–353. [Google Scholar]
- Alenezi, F.S.; Ganesan, S. Geometric-Pixel Guided Single-Pass Convolution Neural Network With Graph Cut for Image Dehazing. IEEE Access 2021, 9, 29380–29391. [Google Scholar] [CrossRef]
- Alenezi, F.; Salari, E.; Verma, A. A Novel Image Fusion Method Which Combines Wiener Filtering, Pulsed Chain Neural Networks and Discrete Wavelet Transforms for Medical Imaging Applications. Int. J. Comput. Sci. Technol. 2018, 9, 9–16. [Google Scholar]
- Gu, K.; Tao, D.; Qiao, J.F.; Lin, W. Learning a no-reference quality assessment model of enhanced images with big data. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 1301–1313. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ancuti, C.O.; Ancuti, C.; Timofte, R.; De Vleeschouwer, C. O-haze: A dehazing benchmark with real hazy and haze-free outdoor images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–23 June 2018; pp. 754–762. [Google Scholar]
- Downing, P.E.; Jiang, Y.; Shuman, M.; Kanwisher, N. A cortical area selective for visual processing of the human body. Science 2001, 293, 2470–2473. [Google Scholar] [CrossRef]
- Gu, Z.; Ju, M.; Zhang, D. A single image dehazing method using average saturation prior. Math. Probl. Eng. 2017, 2017. [Google Scholar] [CrossRef]
- Nishino, K.; Kratz, L.; Lombardi, S. Bayesian defogging. Int. J. Comput. Vis. 2012, 98, 263–278. [Google Scholar] [CrossRef]
- Galdran, A.; Alvarez-Gila, A.; Bria, A.; Vazquez-Corral, J.; Bertalmío, M. On the duality between retinex and image dehazing. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8212–8221. [Google Scholar]
- Khoond, R.; Goyal, B.; Dogra, A. Image Enhancement Using Nonlocal Prior and Gradient Residual Minimization for Improved 64 Visualization of Deep Underwater Image. In Computational Intelligence Methods for Super-Resolution in Image Processing Applications; Springer: Berlin/Heidelberg, Germany, 2021; pp. 261–278. [Google Scholar]
- Talebi, H.; Milanfar, P. Learned perceptual image enhancement. In Proceedings of the 2018 IEEE International Conference on Computational Photography (ICCP), Pittsburgh, PA, USA, 4–6 May 2018; pp. 1–13. [Google Scholar]
- Xiong, J.; Zhuang, P.; Zhang, Y. An Efficient Underwater Image Enhancement Model With Extensive Beer-Lambert Law. In Proceedings of the 2021 IEEE International Conference on Image Processing (ICIP), Abu Dhabi, United Arab Emirates, 25–28 October 2021; pp. 893–897. [Google Scholar]
- Park, E.; Sim, J.Y. Underwater image restoration using geodesic color distance and complete image formation model. IEEE Access 2020, 8, 157918–157930. [Google Scholar] [CrossRef]
- Li, H.; Zhuang, P.; Wei, W.; Li, J. Underwater Image Enhancement Based on Dehazing and Color Correction. In Proceedings of the 2019 IEEE Intl Conf on Parallel & Distributed Processing with Applications, Big Data & Cloud Computing, Sustainable Computing & Communications, Social Computing & Networking (ISPA/BDCloud/SocialCom/SustainCom), Xiamen, China, 16–18 December 2019; pp. 1365–1370. [Google Scholar]
- Deng, X.; Wang, H.; Liu, X. Underwater image enhancement based on removing light source color and dehazing. IEEE Access 2019, 7, 114297–114309. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, J.; Cao, Y.; Wang, Z. A deep CNN method for underwater image enhancement. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 1382–1386. [Google Scholar]
- Wang, N.; Zheng, H.; Zheng, B. Underwater image restoration via maximum attenuation identification. IEEE Access 2017, 5, 18941–18952. [Google Scholar] [CrossRef]
- Carlevaris-Bianco, N.; Mohan, A.; Eustice, R.M. Initial results in underwater single image dehazing. In Proceedings of the Oceans 2010 Mts/IEEE Seattle, Seattle, WA, USA, 20–23 September 2010; pp. 1–8. [Google Scholar]
- Berman, D.; Treibitz, T.; Avidan, S. Diving into haze-lines: Color restoration of underwater images. In Proceedings of the British Machine Vision Conference (BMVC), London, UK, 4–7 September 2017; Volume 1. [Google Scholar]
- Berman, D.; Levy, D.; Avidan, S.; Treibitz, T. Underwater single image color restoration using haze-lines and a new quantitative dataset. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 43, 2822–2837. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chiang, J.Y.; Chen, Y.C. Underwater image enhancement by wavelength compensation and dehazing. IEEE Trans. Image Process. 2011, 21, 1756–1769. [Google Scholar] [CrossRef] [PubMed]
- Wen, H.; Tian, Y.; Huang, T.; Gao, W. Single underwater image enhancement with a new optical model. In Proceedings of the 2013 IEEE International Symposium on Circuits and Systems (ISCAS), Beijing, China, 19–23 May 2013; pp. 753–756. [Google Scholar]
- Jordt, A. Underwater 3D Reconstruction Based on Physical Models for Refraction and Underwater Light Propagation. Ph.D. Thesis, Christian-Albrechts-Universität zu Kiel, Kiel, Germany, 2013. [Google Scholar]
- Jaffe, J.S. Computer modeling and the design of optimal underwater imaging systems. IEEE J. Ocean. Eng. 1990, 15, 101–111. [Google Scholar] [CrossRef]
- Zhao, X.; Jin, T.; Qu, S. Deriving inherent optical properties from background color and underwater image enhancement. Ocean Eng. 2015, 94, 163–172. [Google Scholar] [CrossRef]
- Spinrad, R.W.; Carder, K.L.; Perry, M.J. Ocean Optics; Oxford University Press: Oxford, UK, 1994; Volume 25. [Google Scholar]
- Ruben, L.D.; Szupiany, R.N.; Latosinski, F.; Weibel, C.L.; Wood, M.; Boldt, J. Acoustic Sediment Estimation Toolbox (ASET): A software package for calibrating and processing TRDI ADCP data to compute suspended-sediment transport in sandy rivers. Comput. Geosci. 2020, 140, 104499. [Google Scholar] [CrossRef]
- Song, W.; Wang, Y.; Huang, D.; Tjondronegoro, D. A rapid scene depth estimation model based on underwater light attenuation prior for underwater image restoration. In Pacific Rim Conference on Multimedia; Springer: Berlin/Heidelberg, Germany, 2018; pp. 678–688. [Google Scholar]
- Li, C.; Guo, J.; Chen, S.; Tang, Y.; Pang, Y.; Wang, J. Underwater image restoration based on minimum information loss principle and optical properties of underwater imaging. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 1993–1997. [Google Scholar]
- He, K.; Sun, J.; Tang, X. Single image haze removal using dark channel prior. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 2341–2353. [Google Scholar]
- Peng, L.; Li, B. Single Image Dehazing Based on Improved Dark Channel Prior and Unsharp Masking Algorithm. In International Conference on Intelligent Computing; Springer: Berlin/Heidelberg, Germany, 2018; pp. 347–358. [Google Scholar]
- Smith, R.C.; Baker, K.S. Optical properties of the clearest natural waters (200–800 nm). Appl. Opt. 1981, 20, 177–184. [Google Scholar] [CrossRef] [PubMed]
- Barnard, A.H.; Pegau, W.S.; Zaneveld, J.R.V. Global relationships of the inherent optical properties of the oceans. J. Geophys. Res. Ocean 1998, 103, 24955–24968. [Google Scholar] [CrossRef]
- Gould, R.W.; Arnone, R.A.; Martinolich, P.M. Spectral dependence of the scattering coefficient in case 1 and case 2 waters. Appl. Opt. 1999, 38, 2377–2383. [Google Scholar] [CrossRef]
- Eden, A.; Feige, U.; Feldman, M. Max-min greedy matching. In Proceedings of the 14th Workshop on the Economics of Networks, Systems and Computation, Phoenix, AZ, USA, 28 June 2019; p. 1. [Google Scholar]
- Chen, J.; Guan, B.; Wang, H.; Zhang, X.; Tang, Y.; Hu, W. Image thresholding segmentation based on two dimensional histogram using gray level and local entropy information. IEEE Access 2017, 6, 5269–5275. [Google Scholar] [CrossRef]
- Brandou, V.; Allais, A.G.; Perrier, M.; Malis, E.; Rives, P.; Sarrazin, J.; Sarradin, P.M. 3D reconstruction of natural underwater scenes using the stereovision system IRIS. In Proceedings of the OCEANS 2007-Europe, Aberdeen, UK, 18–21 June 2007; pp. 1–6. [Google Scholar]
- Queiroz-Neto, J.P.; Carceroni, R.; Barros, W.; Campos, M. Underwater stereo. In Proceedings of the Proceedings. 17th Brazilian Symposium on Computer Graphics and Image Processing, Curitiba, Brazil, 20–20 October 2004; pp. 170–177. [Google Scholar]
- Burger, W.; Burge, M.J. Digital Image Processing: An Algorithmic Introduction Using Java; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Monti, F.; Boscaini, D.; Masci, J.; Rodola, E.; Svoboda, J.; Bronstein, M.M. Geometric deep learning on graphs and manifolds using mixture model cnns. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 5115–5124. [Google Scholar]
- Garcia, V.; Bruna, J. Few-shot learning with graph neural networks. arXiv 2017, arXiv:1711.04043. [Google Scholar]
- Narasimhan, M.; Lazebnik, S.; Schwing, A. Out of the box: Reasoning with graph convolution nets for factual visual question answering. In Advances in Neural Information Processing Systems; 2018; pp. 2654–2665. Available online: https://arxiv.org/abs/1811.00538 (accessed on 1 November 2018).
- Cui, Z.; Xu, C.; Zheng, W.; Yang, J. Context-dependent diffusion network for visual relationship detection. In Proceedings of the 26th ACM International Conference on Multimedia, Seoul, Korea, 22–26 October 2018; pp. 1475–1482. [Google Scholar]
- Al-Barazanchi, H.A.; Qassim, H.; Verma, A. Novel CNN architecture with residual learning and deep supervision for large-scale scene image categorization. In Proceedings of the 2016 IEEE 7th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 20–22 October 2016; pp. 1–7. [Google Scholar]
- Yang, D.; Peltoketo, V.T.; Kamarainen, J.K. CNN-Based Cross-Dataset No-Reference Image Quality Assessment. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Seoul, Korea, 27–28 October 2019. [Google Scholar]
- Cheng, P.; He, S.; Cheng, J.; Luan, X.; Liu, F. Asynchronous output feedback control for a class of conic-type nonlinear hidden Markov jump systems within a finite-time interval. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 7644–7651. [Google Scholar] [CrossRef]
- Park, S.H.; Lee, S.; Yun, I.D.; Lee, S.U. Hierarchical MRF of globally consistent localized classifiers for 3D medical image segmentation. Pattern Recognit. 2013, 46, 2408–2419. [Google Scholar] [CrossRef]
- Galdran, A.; Pardo, D.; Picón, A.; Alvarez-Gila, A. Automatic red-channel underwater image restoration. J. Vis. Commun. Image Represent. 2015, 26, 132–145. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Li, H.; Zhuang, P. Underwater image enhancement using a multiscale dense generative adversarial network. IEEE J. Ocean. Eng. 2019, 45, 862–870. [Google Scholar] [CrossRef]
- Li, C.; Guo, J.; Guo, C. Emerging from water: Underwater image color correction based on weakly supervised color transfer. IEEE Signal Process. Lett. 2018, 25, 323–327. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Hou, G.; Tan, L.; Liu, W. A Hybrid Framework for Underwater Image Enhancement. IEEE Access 2020, 8, 197448–197462. [Google Scholar] [CrossRef]
- Song, Y.; Li, J.; Wang, X.; Chen, X. Single image dehazing using ranking convolutional neural network. IEEE Trans. Multimed. 2017, 20, 1548–1560. [Google Scholar] [CrossRef] [Green Version]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef] [Green Version]
- Yang, M.; Sowmya, A. An underwater color image quality evaluation metric. IEEE Trans. Image Process. 2015, 24, 6062–6071. [Google Scholar] [CrossRef]
- Panetta, K.; Gao, C.; Agaian, S. Human-visual-system-inspired underwater image quality measures. IEEE J. Ocean. Eng. 2015, 41, 541–551. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique Name | Abbreviation | Reference |
|---|---|---|
| Automatic Red-Channel method | (ARC) | [58] |
| Underwater image enhancement using a Multi-scale dense Generative Adversarial Network | (UWGAN) | [59] |
| Weakly Supervised Color Transfer | (WSCT) | [60] |
| Underwater image enhancement model with Extensive Beer-Lambert Law | (UEBLL) | [22] |
| Underwater image enhancement based on Removal of Light Source Color and Dehazing | (RLSCD) | [25] |
| Hybridframework for Underwater Image Enhancement | (HUIE) | [61] |
| Item | Experimental Value Range |
|---|---|
| Average Training Time | (41 min 55 s)–(20 min 53 s) |
| Learning Rate | 0.095–0.015 |
| Validation Frequency | 1000–4000 |
| Iterations | 33,000–132,000 |
| Estimated | 98 [62] |
| Algorithm | and | Entropy | UCIQE | UIQM | UICM | UISM |
|---|---|---|---|---|---|---|
| ARC [58] | 7.60 | 0.52 | 2.85 | −32.85 | 5.22 | |
| UWGAN [59] | 7.63 | 0.59 | 4.27 | 5.64 | 5.58 | |
| WSCT [60] | 7.56 | 0.54 | 2.31 | −57.29 | 5.31 | |
| UEBLL [22] | 7.75 | 0.51 | 3.72 | 10.05 | 5.08 | |
| RLSCD [25] | 7.89 | 0.62 | 5.49 | 2.85 | 11.74 | |
| HUIE [61] | 7.68 | 0.58 | 4.19 | 3.72 | 8.59 | |
| Proposed | 7.92 | 0.65 | 6.02 | 10.56 | 12.58 | |
| ±0.03 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alenezi, F.; Armghan, A.; Mohanty, S.N.; Jhaveri, R.H.; Tiwari, P. Block-Greedy and CNN Based Underwater Image Dehazing for Novel Depth Estimation and Optimal Ambient Light. Water 2021, 13, 3470. https://doi.org/10.3390/w13233470
Alenezi F, Armghan A, Mohanty SN, Jhaveri RH, Tiwari P. Block-Greedy and CNN Based Underwater Image Dehazing for Novel Depth Estimation and Optimal Ambient Light. Water. 2021; 13(23):3470. https://doi.org/10.3390/w13233470
Chicago/Turabian StyleAlenezi, Fayadh, Ammar Armghan, Sachi Nandan Mohanty, Rutvij H. Jhaveri, and Prayag Tiwari. 2021. "Block-Greedy and CNN Based Underwater Image Dehazing for Novel Depth Estimation and Optimal Ambient Light" Water 13, no. 23: 3470. https://doi.org/10.3390/w13233470
APA StyleAlenezi, F., Armghan, A., Mohanty, S. N., Jhaveri, R. H., & Tiwari, P. (2021). Block-Greedy and CNN Based Underwater Image Dehazing for Novel Depth Estimation and Optimal Ambient Light. Water, 13(23), 3470. https://doi.org/10.3390/w13233470