
Machine Learning and Urban Drainage Systems: State-of-the-Art Review



Abstract
:1. Introduction
2. Review Methodology
3. Machine Learning (ML) Technology
3.1. ML Overview
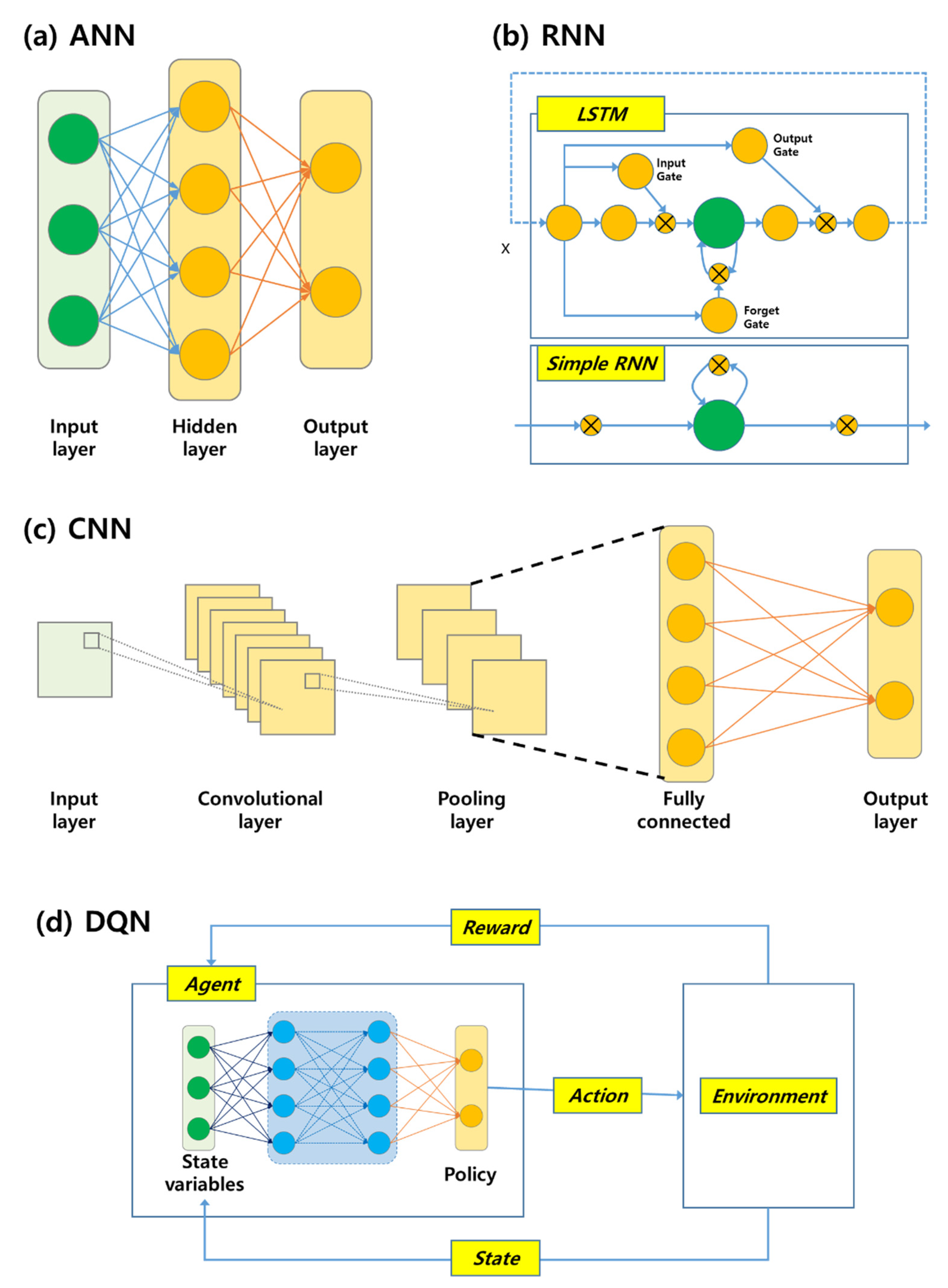
3.2. Artificial Neural Networks (ANNs)
3.3. Recurrent Neural Networks (RNNs)
3.4. Convolutional Neural Networks (CNNs)
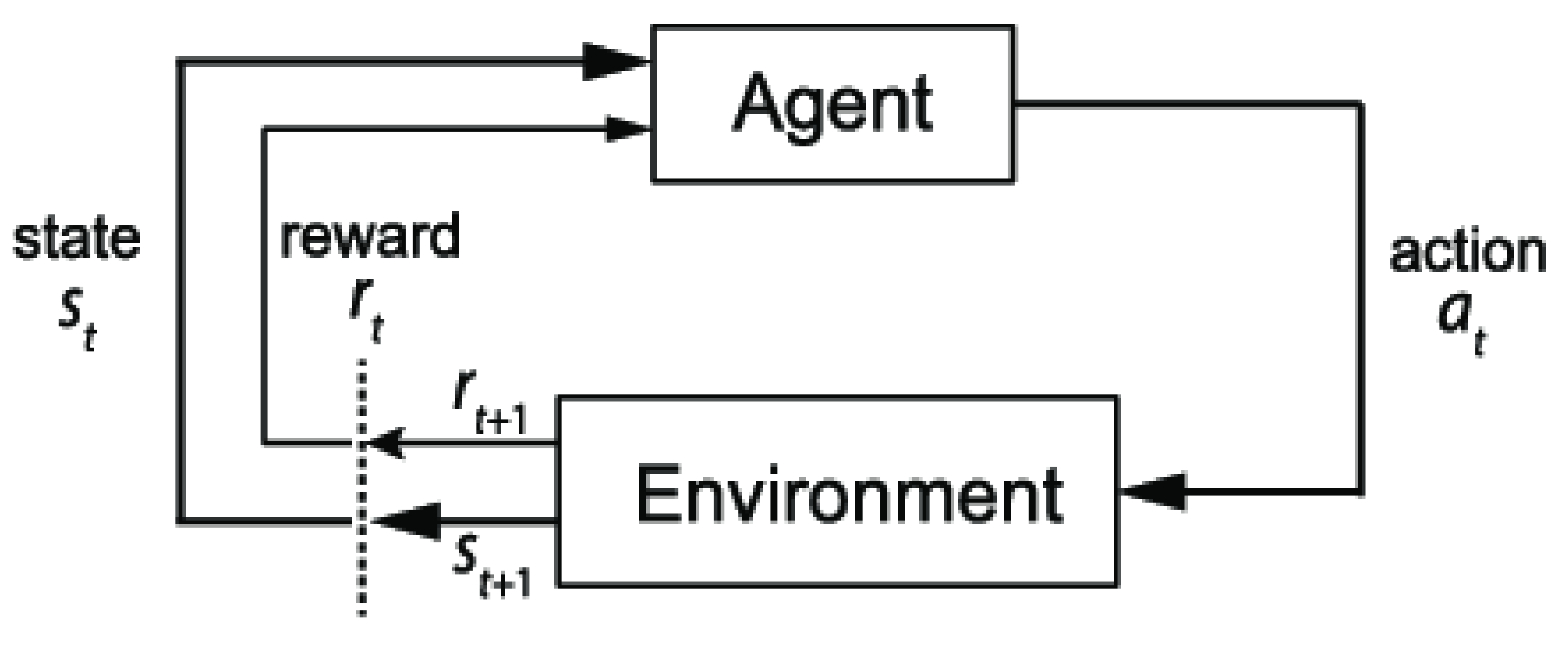
3.5. Deep Q-Networks (DQNs)
4. ML-Based Urban Drainage System (UDS) Studies
4.1. Operation: Real-Time Operation Control
4.2. Management: Flood-Inundation Prediction
4.3. Maintenance: Pipe Defect Detection
5. Recommendations
5.1. Challenges
5.2. Future Directions
- (1).
- Feature extraction method: the efficient identification of features from advanced measurements (e.g., CCTVs and drones) that comprise only a single DL algorithm (e.g., CNN) can be considered. The integration of a hybrid DL algorithm (e.g., RNN–CNN) should be considered to effectively extract important features.
- (2).
- Computation resources and combination with physically based model: the processing of physically based hydrodynamic/hydraulic models (e.g., 1D/2D and 2D model) is time consuming. Such limitations are caused by the fact that real-time prediction, operation, and simulation cannot be considered. Therefore, ML-based UDS studies that actively consider high-performance computing resources (e.g., graphic processing units and supercomputers) should be conducted.
- (3).
- Necessity to increase utilization of reinforcement learning: the development of UDSs based on reinforcement learning is rare. However, reinforcement learning can be applied and considered in terms of the UDS operation, e.g., the gate and/or pump operation in the UDS. In addition, a practitioner should refer to a predefined manual to control the gate or pump operation. Therefore, considering reinforcement learning-based UDSs for pump and/or gate operations can reduce mistakes from practitioners.
- (4).
- Necessity to utilize advanced technologies (satellites and drones): advanced technologies such as analyses and predictions based on raw data using satellites and drones, which are advanced equipment based on remote-sensing fields, should be developed. In addition, a new and/or advanced methodology for improving the predictive power of water information presented as an image, as well as the time-series form, should be developed to analyze the characteristics and patterns of each element. ML technology must be systematically used to develop such a methodology. In the case of ML technology, because it is a data-based approach, a significant amount of data and high quality must be ensured for its advancement. In particular, multiple remote sensors based on the cloud and Internet of Things should be implemented in UDSs such that a significant amount of water information (e.g., precipitation, temperature, wind, humidity, flow rate, and water level) can be acquired.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviation
| ML | Machine learning |
| DL | Deep learning |
| UDS | Urban drainage system |
| AI | Artificial intelligence |
| ANN | Artificial neural network |
| CNN | Convolutional neural network |
| RNN | Recurrent neural network |
| DQN | Deep Q-network |
| LSTM | Long short-term memory |
| CCTV | Closed-circuit television |
| IoT | Internet of Things |
References
- Hsu, M.H.; Chen, S.H.; Chang, T.J. Inundation simulation for urban drainage basin with storm sewer system. J. Hydrol. 2000, 234, 21–37. [Google Scholar] [CrossRef] [Green Version]
- Abderrezzak, K.E.K.; Paquier, A.; Mignot, E. Modelling flash flood propagation in urban areas using a two-dimensional numerical model. Nat. Hazards 2009, 50, 433–460. [Google Scholar] [CrossRef]
- Sanudo, E.; Cea, L.; Puertas, J. Modelling Pluvial Flooding in Urban Areas Coupling the Models Iber and SWMM. Water 2020, 12, 2647. [Google Scholar] [CrossRef]
- Patowary, S.; Sarma, A.K. Two-Dimensional Numerical Model for Urban Drainage System. Urban Hydrol. 2016, 73, 163–173. [Google Scholar]
- Bhola, P.K.; Leandro, J.; Disse, M. Framework for Offline Flood Inundation Forecasts for Two-Dimensional Hydrodynamic Models. Geosiciences 2018, 8, 346. [Google Scholar] [CrossRef] [Green Version]
- Keum, H.J.; Han, K.Y.; Kim, H.Y. Real-Time Flood Disaster Prediction System by Applying Machine Learning Technique. Water Resour. Hydrol. Eng. 2020, 24, 2835–3848. [Google Scholar] [CrossRef]
- Bates, P.D.; Horritt, M.S.; Fewtrell, T.J. A simple inertial formulation of the shallow water equations for efficient two-dimensional flood inundation modelling. J. Hydrol. 2010, 387, 33–45. [Google Scholar] [CrossRef]
- Kalyanapu, A.J.; Shanker, S.; Pardyjak, E.R.; Judi, D.R.; Burian, S.J. Assessment of GPU computational enhancement to a 2D flood model. Environ. Model. Softw. 2011, 26, 1009–1016. [Google Scholar] [CrossRef]
- Munawar, H.S.; Hammad, A.W.A.; Waller, S.T. A review on flood management technologies related to image processing and machine learning. Autom. Constr. 2021, 132, 103916. [Google Scholar] [CrossRef]
- Mosavi, A.; Ozturk, P.; Chau, K. Flood Prediction Using Machine Learning Models: Literature Review. Water 2018, 10, 1536. [Google Scholar] [CrossRef] [Green Version]
- Bui, D.T.; Hoaug, N.; Martínez-Álvarez, F.; Ngo, P.T.; Hoa, P.V.; Pham, T.D.; Samui, P.; Costache, R. A novel deep learning neural network approach for predicting flash flood susceptibility: A case study at a high frequency tropical storm area. Sci. Total Environ. 2020, 20, 134413. [Google Scholar]
- Wadiasari, I.R.; Nugroho, L.E. Deep learning multilayer perceptron (MLP) for flood prediction model using wireless sensor network based hydrology time series data mining. In Proceedings of the International Conference on Innovative and Creative Information Technology (ICITech), Salatiga, Indonesia, 2–4 November 2017. [Google Scholar]
- Dong, S.; Yu, T.; Farahmand, H.; Mostafavi, A. A hybrid deep learning model for predictive flood warning and situation awareness using channel network sensors data. Comput.-Aided Civ. Infrastruct. Eng. 2020, 36, 402–420. [Google Scholar] [CrossRef]
- Hu, R.; Fang, F.; Pain, C.C.; Navon, I.M. Rapid spatio-temporal flood prediction and uncertainty quantification using a deep learning method. J. Hydrol. 2019, 575, 911–920. [Google Scholar] [CrossRef]
- Song, T.; Ding, W.; Liu, H.; Wu, J.; Zhou, H.; Chu, J. Uncertainty Quantification in Machine Learning Modeling for Multi-Step Time Series Forecasting: Example of Recurrent Neural Networks in Discharge Simulations. Water 2020, 12, 912. [Google Scholar] [CrossRef] [Green Version]
- Sankaranarayanan, S.; Prabhakar, M.; Satish, S.; Jain, P.; Ramprasad, A.; Krishnan, A. Flood prediction based on weather parameters using deep learning. J. Water Clim. Chang. 2020, 11, 1766–1783. [Google Scholar] [CrossRef]
- Saba, L.; Biswas, M.; Kuppili, V.; Godia, E.C.; Suri, H.S.; Edla, D.R.; Omerzu, T.; Laird, J.R.; Khanna, N.N.; Mavrogeni, S.; et al. The present and future of deep learning in radiology. Eur. J. Radiol. 2019, 114, 14–24. [Google Scholar] [CrossRef] [PubMed]
- Sahiner, B.; Pezeshk, A.; Hadjiiski, L.M.; Wang, X.; Drukker, K.; Cha, K.H.; Summers, R.M.; Giger, M.L. Deep learning in medical imaging and radiation therapy. Med. Phys. 2019, 46, e1–e36. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ochoa, D.; Riano-Briceno, G.; Quijano, N.; Ocampo-Martinez, C. Control of Urban Drainage Systems: Optimal Flow Control and Deep Learning in Action. In Proceedings of the American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019. [Google Scholar]
- Werbos, P. Beyond Regression: New Tools for Prediction and Analysis in the Behavioral Sciences. Ph.D. Dissertation, Harvard University, Cambridge, MA, USA, 1974. [Google Scholar]
- Dupond, S. A thorough review on the current advance of neural network structures. Annu. Rev. Control 2019, 14, 200–230. [Google Scholar]
- Abiodun, O.I.; Jantan, A.; Omolara, A.E.; Dada, K.V.; Mohamed, N.A.; Arshad, H. State-of-the-art in artificial neural network applications: A survey. Heliyon 2018, 4, e00938. [Google Scholar] [CrossRef] [Green Version]
- Tealab, A. Time series forecasting using artificial neural networks methodologies: A systematic review. Future Comput. Inform. J. 2018, 3, 334–340. [Google Scholar] [CrossRef]
- Sepp, H.; Jürgen, S. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar]
- Hubel, D.H.; Wiesel, T.N. Receptive fields and functional architecture of monkey striate cortex. J. Physiol. 1968, 195, 215–243. [Google Scholar] [CrossRef] [PubMed]
- Fukushima, K.; Miyake, S. Neocognitron: A self organizing neural network model for a mechanism of visual pattern recognition. In Competition and Cooperation in Neural Nets; Springer: Berlin, Germany, 1982; pp. 267–285. [Google Scholar]
- Valueva, M.V.; Nagornov, N.N.; Lyakhov, P.A.; Valuev, G.V.; Chervyakov, N.I. Application of the residue number system to reduce hardware costs of the convolutional neural network implementation. Math. Comput. Simul. 2020, 177, 232–243. [Google Scholar] [CrossRef]
- Zhang, W. Shift-invariant pattern recognition neural network and its optical architecture. In Proceedings of the Annual Conference of the Japan Society of Applied Physics, Tokyo, Japan, 9–13 September 2018. [Google Scholar]
- Zhang, W. Parallel distributed processing model with local space-invariant interconnections and its optical architecture. Appl. Opt. 1990, 29, 4790–4797. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Niu, H.; Carrasco, J.; Lennox, B.; Arvin, F. Voronoi-Based Multi-Robot Autonomous Exploration in Unknown Environments via Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2020, 69, 14413–14423. [Google Scholar] [CrossRef]
- Otterlo, M.V.; Wiering, M. Reinforcement learning and markov decision processes. In Reinforcement Learning; Springer: Berlin, Germany, 2012. [Google Scholar]
- Mullapudi, A.; Lewis, M.J.; Gruden, C.L.; Kerkez, B. Deep reinforcement learning for the real time control of stormwater systems. Adv. Water Resour. 2020, 140, 103600. [Google Scholar] [CrossRef]
- Martinez-Piazuelo, J.; Ochoa, D.E.; Quijano, N.; Giraldo, L.F. A multi-critic reinforcement learning method: An application to multi-tank water systems. IEEE Access. 2020, 8, 173227–173238. [Google Scholar] [CrossRef]
- Wang, C.; Bowes, B.; Tavakoli, A.; Adams, S.; Goodall, J.; Beling, P. Smart Stormwater Control Systems: A Reinforcement Learning Approach. In Proceedings of the ISCRAM Conference Proceedings—17th International Conference on Information Systems for Crisis Response and Management, Blacksburg, VA, USA, 24–27 May 2020. [Google Scholar]
- Kim, S.; Singh, V.P. Flood forecasting using neural computing techniques and conceptual class segregation. J. Am. Water Resour. Assoc. 2013, 49, 1421–1435. [Google Scholar] [CrossRef]
- Jingyi, Z.; Hall, M.J. Regional flood frequency analysis for the Gan-Ming River basin in China. J. Hydrol. 2004, 296, 98–117. [Google Scholar] [CrossRef]
- Sahoo, G.B.; Ray, C.; De Carlo, E.H. Use of neural network to predict flash flood and attendant water qualities of a mountainous stream on Oahu, Hawaii. J. Hydrol. 2006, 327, 525–538. [Google Scholar] [CrossRef]
- Chang, F.-J.; Chen, P.-A.; Lu, Y.-R.; Huang, E.; Chang, K.-Y. Real-time multi-step-ahead water level forecasting by recurrent neural networks for urban flood control. J. Hydrol. 2014, 517, 836–846. [Google Scholar] [CrossRef]
- Shen, H.-Y.; Chang, L.-C. Online multistep-ahead inundation depth forecasts by recurrent NARX networks. Hydrol. Earth Syst. Sci. 2013, 17, 935–945. [Google Scholar] [CrossRef] [Green Version]
- Heiser, M.; Scheidl, C.; Eisl, J.; Spangl, B.; Hübl, J. Process type identification in torrential catchments in the eastern Alps. Geomorphology 2015, 232, 239–247. [Google Scholar] [CrossRef]
- Wei, C.C. Soft computing techniques in ensemble precipitation nowcast. Appl. Soft Comput. J. 2013, 13, 793–805. [Google Scholar] [CrossRef]
- Chang, L.-C.; Shen, H.-Y.; Chang, F.-J. Regional flood inundation nowcast using hybrid SOM and dynamic neural networks. J. Hydrol. 2014, 519, 476–489. [Google Scholar] [CrossRef]
- French, J.; Mawdsley, R.; Fujiyama, T.; Achuthan, K. Combining machine learning with computational hydrodynamics for prediction of tidal surge inundation at estuarine ports. Proced. IUTAM 2017, 25, 28–35. [Google Scholar] [CrossRef]
- Hong, W.-C. Rainfall forecasting by technological machine learning models. Appl. Math. Comput. 2008, 200, 41–57. [Google Scholar] [CrossRef]
- Rajurkar, M.; Kothyari, U.; Chaube, U. Modeling of the daily rainfall-runoff relationship with artificial neural network. J. Hydrol. 2004, 285, 96–113. [Google Scholar] [CrossRef]
- Hsu, M.-H.; Lin, S.-H.; Fu, J.-C.; Chung, S.F.; Chen, A.S. Longitudinal stage profiles forecasting in rivers for flash floods. J. Hydrol. 2010, 388, 426–437. [Google Scholar] [CrossRef] [Green Version]
- Fleming, S.W.; Bourdin, D.R.; Campbell, D.; Stull, R.B.; Gardner, T. Development and operational testing of a super-ensemble artificial intelligence flood-forecast model for a pacific northwest river. J. Am. Water Resour. Assoc. 2015, 51, 502–512. [Google Scholar] [CrossRef]
- Xie, S.; Wu, W.; Mooser, S.; Wang, Q.J.; Nathan, R.; Huang, Y. Artificial neural network based hybrid modeling approach for flood inundation modeling. J. Hydrol. 2021, 592, 125605. [Google Scholar] [CrossRef]
- Jimeno-Sáez, P.; Senent-Aparicio, J.; Pérez-Sánchez, J.; Pulido-Velazquez, D.; Cecilia, J.M. Estimation of instantaneous peak flow using machine-learning models and empirical formula in peninsular Spain. Water 2017, 9, 347. [Google Scholar] [CrossRef] [Green Version]
- Shu, C.; Ouarda, T. Regional flood frequency analysis at ungauged sites using the adaptive neuro-fuzzy inference system. J. Hydrol. 2008, 349, 31–43. [Google Scholar] [CrossRef]
- Lohani, A.K.; Goel, N.; Bhatia, K. Improving real time flood forecasting using fuzzy inference system. J. Hydrol. 2014, 509, 25–41. [Google Scholar] [CrossRef]
- Ghaderpour, E.; Vujadinovic, T.; Hassan, Q.K. Application of the least-squares wavelet software in hydrology: Athabasca River basin. J. Hydrol. Reg. Stud. 2021, 36, 100847. [Google Scholar] [CrossRef]
- Altunkaynak, A.; Nigussie, T.A. Prediction of daily rainfall by a hybrid wavelet-season-neuro technique. J. Hydrol. 2015, 529, 287–301. [Google Scholar] [CrossRef]
- Yang, M.; Sang, Y.F.; Liu, C.; Wang, Z. Discussion on the choice of decomposition level for wavelet based hydrological time series modeling. Water 2016, 8, 197. [Google Scholar] [CrossRef] [Green Version]
- Hosseiny, H.; Nazari, F.; Smith, V.; Nataraj, C. A framework for modeling flood depth using a hybrid of hydraulics and machine learning. Sci. Rep. 2020, 10, 8222. [Google Scholar] [CrossRef] [PubMed]
- Kabir, S.; Patidar, S.; Xia, X.; Liang, Q.; Neal, J.; Pender, G. A deep convolutional neural network model for rapid prediction of fluvial flood inundation. J. Hydrol. 2020, 590, 125481. [Google Scholar] [CrossRef]
- Guo, Z.; Leitao, J.P.; Simões, N.E.; Moosavi, V. Data-driven flood emulation: Speeding up urban flood predictions by deep convolutional neural networks. J. Flood Risk Manag. 2021, 14, 12684. [Google Scholar] [CrossRef]
- Ding, Y.; Zhu, Y.; Feng, J.; Zhang, P.; Cheng, Z. Interpretable spatio-temporal attention LSTM model for flood forecasting. Neurocomputing 2020, 403, 348–359. [Google Scholar] [CrossRef]
- Kao, I.F.; Zhou, Y.; Chang, L.C.; Chang, F.J. Exploring a Long Short-Term Memory based Encoder-Decoder framework for multi-step-ahead flood forecasting. J. Hydrol. 2020, 583, 124631. [Google Scholar] [CrossRef]
- Wang, J.H.; Lin, G.F.; Chang, M.J.; Huang, I.H.; Chen, Y.R. Real-time water-level forecasting using dilated causal convolutional neural networks. Water Resour. Manag. 2019, 33, 3759–3780. [Google Scholar] [CrossRef]
- Bhola, P.K.; Nair, B.B.; Leandro, J.; Rao, S.N.; Disse, M. Flood inundation forecasts using validation data generated with the assistance of computer vision. J. Hydroinform. 2019, 21, 240–256. [Google Scholar] [CrossRef] [Green Version]
- Moy de Vitry, M.; Kramer, S.; Wegner, J.D.; Leitão, J.P. Scalable flood level trend monitoring with surveillance cameras using a deep convolutional neural network. Hydrol. Earth Syst. Sci. 2019, 23, 4621–4634. [Google Scholar] [CrossRef] [Green Version]
- Bermúdez, M.; Cea, L.; Puertas, J. A rapid flood inundation model for hazard mapping based on least squares support vector machine regression. J. Flood Risk Manag. 2019, 12, 12522. [Google Scholar] [CrossRef] [Green Version]
- Yang, T.; Sun, F.; Gentine, P.; Liu, W.; Wang, H.; Yin, J.; Du, M.; Liu, C. Evaluation and machine learning improvement of global hydrological model-based flood simulations. Environ. Res. Lett. 2019, 14, 114027. [Google Scholar] [CrossRef]
- Worland, S.C.; Steinschneider, S.; Asquith, W.; Knight, R.; Wieczorek, M. Prediction and inference of flow duration curves using multioutput neural networks. Water Resour. Res. 2019, 55, 6850–6868. [Google Scholar] [CrossRef] [Green Version]
- Moselhi, O.; Shehab-Eldeen, T. Automated detection of surface defects in water and sewer pipes. Autom. Constr. 1999, 8, 581–588. [Google Scholar] [CrossRef]
- Moselhi, O.; Shehab-Eldeen, T. Classification of defects in sewer pipes using neural networks. J. Infrastruct. Syst. 2000, 6, 97–104. [Google Scholar] [CrossRef]
- Shehab, T.; Moselhi, O. Automated detection and classification of infiltration in sewer pipes. J. Infrastruct. Syst. 2005, 11, 165–171. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 24–27 June 2014. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Chen, S.; Mulgrew, B.; Grant, P.M. A clustering technique for digital communications channel equalization using radial basis function networks. IEEE Trans. Neural Netw. 1993, 4, 570–590. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Demirkol, A.; Demir, Z.; Emre, E. Lecture Notes in Computer Science; Springer: Berlin, Germany, 2005. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016. [Google Scholar]
- Safari, S.; Aliyari, S.M. Detection and isolation of interior defects based on image processing and neural networks: HDPE pipeline case study. J. Pipeline Syst. Eng. Pract. 2018, 9, 05018001. [Google Scholar] [CrossRef]
- Kumar, S.S.; Abraham, D.M.; Jahanshahi, M.R.; Iseley, T.; Starr, J. Automated defect classification in sewer closed circuit television inspections using deep convolutional neural networks. Autom. Constr. 2018, 91, 273–283. [Google Scholar] [CrossRef]
- Cheng, J.C.; Wang, M. Automated detection of sewer pipe defects in closed-circuit television images using deep learning techniques. Autom. Constr. 2018, 95, 155–171. [Google Scholar] [CrossRef]
- Li, D.; Cong, A.; Guo, S. Sewer damage detection from imbalanced CCTV inspection data using deep convolutional neural networks with hierarchical classification. Autom. Constr. 2019, 101, 199–208. [Google Scholar] [CrossRef]
- Yin, X.; Chen, Y.; Bouferguene, A.; Zaman, H.; Al-Hussein, M.; Kurach, L. A deep learning-based framework for an automated defect detection system for sewer pipes. Autom. Constr. 2020, 109, 102967. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| References | Main Novelty | Input | ML Technology |
|---|---|---|---|
| Xie et al. (2020) [55] | Proposed ANN-based hybrid modeling to improve model performance | Inflow | ANN [20] |
| Hossein Hosseiny et al. (2020) [56] | Proposed novel hydraulics–ANN hybrid model to identify flood area and depth | Water surface elevation, and rough coefficient | ANN [20] |
| Kabir et al. (2020) [57] | Proposed GPU-based CNN model to improve model efficiency and performance | Discharge, and water depth hydrograph | CNN [25] |
| Guo et al. (2020) [58] | Proposed image-to-image translation to predict maximum flood depth | Rainfall hyetograph | CNN [25] |
| Ding et al. (2020) [59] | Proposed flood forecasting and interpretable spatiotemporal attention LSTM | Rainfall, and inflow | LSTM (RNN) [23] |
| Kao et al. (2020) [60] | Proposed novel LSTM-based encoder–decoder model for multi-step-ahead flood-inundation prediction | Rainfall, and inflow | LSTM (RNN) [23] |
| References | Main Novelty | Defect Types | ML Techniques |
|---|---|---|---|
| Safari and Shoorehdeli (2018) [74] | Proposed detection of interior defects based on image processing and ANN | Short, medium, and long cracks; small, medium, and large perforations | ANN [20] |
| Kumar et al. (2018) [75] | Proposed defect classification in sewer CCTV inspections using deep CNN | Root intrusions, deposits, cracks, infiltration, debris, connections, and material change | CNN [25] |
| Cheng and Wang (2018) [76] | Proposed detection of sewer pipe defects based on CCTV images using deep CNN | Tree root intrusion, deposit, infiltration, and cracks | CNN [25] |
| Li and Guo (2019) [77] | Proposed sewer damage detection from imbalanced CCTV inspection data using deep CNN with hierarchical classification | Deposit settlement, joint offset, broken, obstacles, and deformation | CNN [25] |
| Yin et al. (2020) [78] | Proposed deep CNN-based defect detection system for sewer pipes using CCTV | Breakage, cracks, deposits, fractures, taps, holes, and roots | CNN [25] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, S.H.; Kim, J.H. Machine Learning and Urban Drainage Systems: State-of-the-Art Review. Water 2021, 13, 3545. https://doi.org/10.3390/w13243545
Kwon SH, Kim JH. Machine Learning and Urban Drainage Systems: State-of-the-Art Review. Water. 2021; 13(24):3545. https://doi.org/10.3390/w13243545
Chicago/Turabian StyleKwon, Soon Ho, and Joong Hoon Kim. 2021. "Machine Learning and Urban Drainage Systems: State-of-the-Art Review" Water 13, no. 24: 3545. https://doi.org/10.3390/w13243545
APA StyleKwon, S. H., & Kim, J. H. (2021). Machine Learning and Urban Drainage Systems: State-of-the-Art Review. Water, 13(24), 3545. https://doi.org/10.3390/w13243545