1. Introduction
As part of the Earth’s hydrosphere, soil water is an important element in the terrestrial hydrological cycle. Soil water plays an important role in hydrological processes and vegetation restoration, which is connected with the conversion between surface water and groundwater [
1]. Soil water resources affect terrestrial vegetation restoration and are one of the key indicators used to evaluate regional ecological environments [
2]. Soil water shortages are one of the most severe global problems in water-limited ecosystems [
3].
The Loess Plateau in China contains deep and concentrated loess with a thickness of about 350 m, and these large reserves of soil provide support for vegetation growth [
4]. It is also one of the areas with the most serious soil erosion and environmental problems in China [
5,
6]. Due to the low rainfall and high evaporation rate in the area, water resources are very scarce. The shortage of water resources has caused variety of ecological problems, such as vegetation degradation and soil desiccation. These problems have seriously affected the sustainable development of vegetation restoration on the Loess Plateau. This has become a key issue that needs to be taken seriously. Although the Grain-for-Green Project (GFGP) implemented in 1999 has played a pivotal role in the restoration and reconstruction of vegetation in this region, progress on the Loess Plateau has been restricted by the low and concentrated annual precipitation (559.6 mm), which imposes tremendous pressure on vegetation reconstruction in this area [
7]. Therefore, determining whether the soil moisture in the Loess Plateau can satisfy the vegetation growth in this area has become a research hotspot in academia and an urgent scientific problem that needs to be solved. Gaining a scientific understanding of the amount of water infiltration in the soil and the process of soil water movement in the loess area is the key to solving this problem. The soil water movement in the loess region is basically unsaturated soil flow, but it is difficult to accurately describe the water movement in the unsaturated soil because of the complexity of the soil’s pore structure. This complex characteristic is manifested in the poor agglomeration and strong dispersion of the topsoil and the high density of the deep soil (200 cm). Therefore, exploring the tools and methods applicable to studying unsaturated soil water movement in the loess area is a prerequisite for determining the threshold of the ecological use of water in forest areas and a reasonable configuration of vegetation [
8,
9,
10].
The saturated flow and unsaturated flow exhibit differences due to differences in their driving forces and hydraulic conductivities. The driving force of the saturated flow is the gravitational potential and the pressure potential. The pores in saturated soil are all filled with water, and the hydraulic conductivity is constant. However, unsaturated flow is affected by gravitational and matrix potentials, and parts of the pores in the soil are filled with water, which is a function of the soil water content. Unsaturated flow is the main mode state of water flow under natural conditions, so it is also the focus of this research. The method based on the physical principles used to simulate the soil water infiltration and redistribution processes is an effective way of exploring soil water movement in unsaturated zones [
11]. Early studies widely used the Horton model [
12], the Philip model [
13], the Smith model [
14], the Kostialiv-Lewis model [
15], and other empirical models to describe soil water infiltration processes. Problems such as the vague physical meanings and high characteristic parameter requirements of empirical models, however, have limited their accurate description of soil water dynamics. Numerical simulation methods have become a hot topic in recent years because they can effectively simulate unsaturated soil moisture movement based on a small number of monitoring results. Several scholars have used numerical models to study soil water movement in sites with different soil types and scales, such as the Soil Water Atmosphere Plant (SWAP) model [
16], the Soil and Water Assessment Tool (SWAT) model [
17], the Daisy model [
18], and the MODFLOW model [
19]. Such numerical models, however, also suffer from limitations such as relatively fixed research scales and difficult-to-determine parameters, making it difficult to extend applications to unsaturated soil water movement.
The Hydrus-1D model based on Richard’s equation has flexible input and output interfaces, integrates parameter optimization, supports the simulation of constant (constant water content or constant flux) and non-constant (variable pressure head, free drainage, deep drainage) boundary conditions, and is suitable for simulating one-dimensional vertical water movement in unsaturated soils [
20]. Due to its flexible boundary conditions, the Hydrus-1D model can preferably simulate the soil-plant-atmosphere hydrological cycle, mainly including the effective rainfall in the forest, the root water absorption, the soil water stock, and the percolation [
20]. At present, the model has been widely used in research on farmland irrigation, and water and salt transport, pollutant transport on the Loess Plateau. Li et al. researched the soil moisture in deep profiles in the highlands [
21]; Yu et al. analyzed soil and salt transportation under different irrigation regimes in the loess area [
22]. However, few studies have been conducted on the soil water movement in the forest land established by the GFGP on the Loess Plateau. In this article, the Hydrus-1D model is used to simulate the soil water movement in the forest land on the Loess Plateau. Currently, clarifying the water balance of the plant-soil and the response mechanism of the soil water to different rainfall conditions is a key issue in formulating policies for further vegetation allocation, which the vegetation can only rely on rainfall for replenishment. The specific objectives of this study are (1) to estimate the water balance composition of the GFGP forests in a dry year and a wet year, including evapotranspiration, soil water stock and percolation; and (2) to explore whether water can be recharged to the deep soil in dry years.
As the pioneer afforestation tree for the GFGP, black locust (
Robinia pseudoacacia) has a good soil and water conservation function and is an ideal tree species for loess areas. Many of the studies on black locust plantations have focused on carbon sequestration [
23], transpiration activity [
24], and productivity [
25]. Few studies, however, have focused on the long-term location monitoring and simulation of soil moisture in
Robinia pseudoacacia plantations. Therefore, in this study, we used the Hydrus-1D model to simulate the movement of water in an unsaturated soil profile in a black locust forest based on continuous soil water data observations for many years. In addition, we also investigated the redistribution of the infiltrated water in the soil profile and the response of the soil water to precipitation in order to provide a basis for optimizing the utilization of water resources and the allocation of vegetation in the loess areas.
2. Materials and Methods
2.1. Study Site and Experimental Design
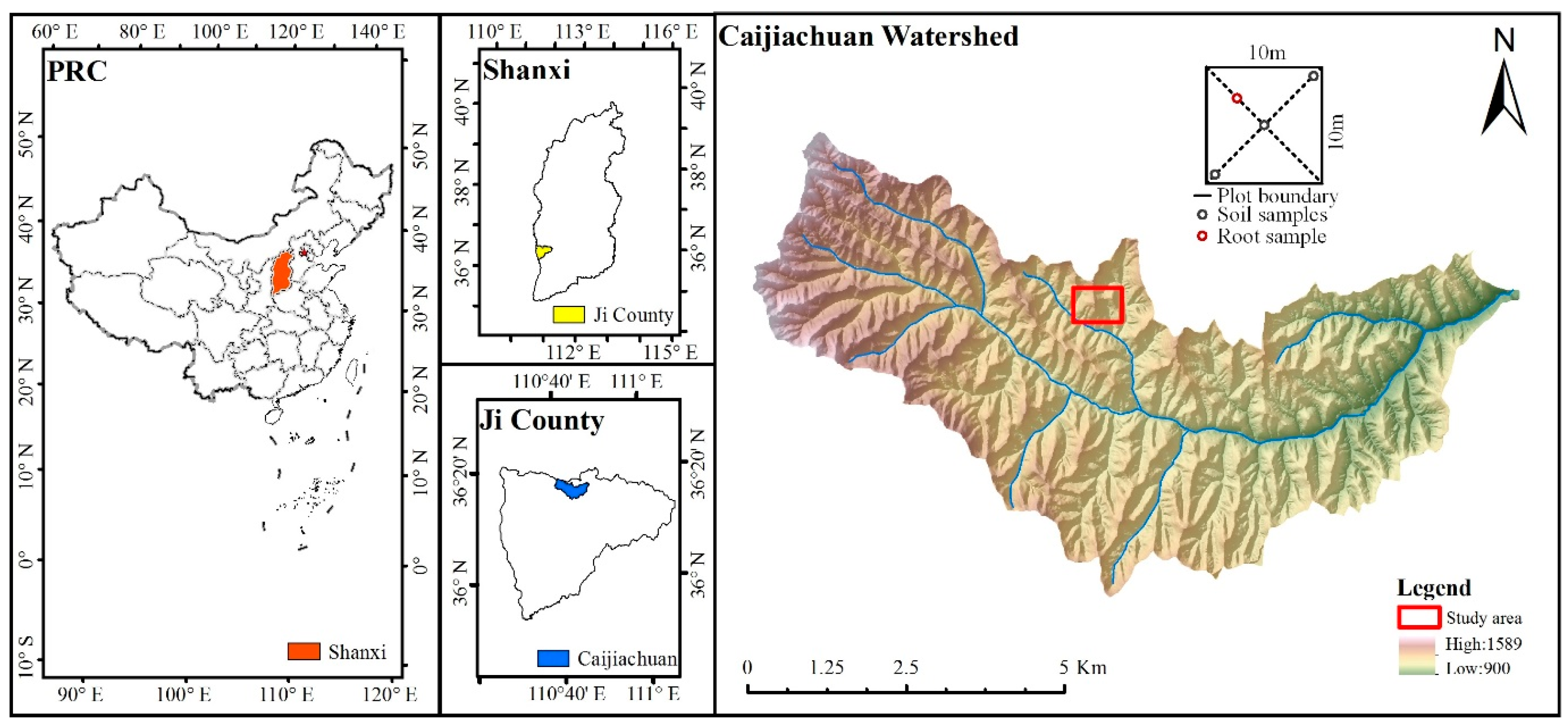
The study area is located in the National Forest Ecosystem Field Scientific Observatory Station in Ji County, Shanxi Province, China. The experimental site is situated in the Caijiachuan watershed (110°39′45″–110°47′45″ E, 36°14′27″–36°18′23″ N) on the Loess Plateau. The topographic features are a typical loess gully and hilly area, with altitudes of 900 to 1589 m a.s.l. The area of the watershed is 38 km
2, the length of the watershed is 14 km, and the total length of the main stream and tributary stream is 51.49 km. The average drainage density is 1.35 km/km
2. Subject to a temperate continental climate, the annual mean temperature is 10 °C the annual sunshine hours are 2536.8 h, and the frost-free period lasts for 172 days. The annual mean rainfall is 579 mm, with the precipitation from June to September accounting for 67%, and the annual average water surface evaporation is 1732 mm (observed using Large Evaporation Panels). The main soil types are cinnamon soil with loess parent material [
26]. The predominant afforestation species are
Robinia pseudoacacia,
Pinus tabulaeformis, and
Platycladus orientalis; and the forest coverage in the study area is 39.8%.
We selected a
Robinia pseudoacacia forest planted in 1991 as the long-term observation plot in the Caijiachuan watershed. We selected three 10 m × 10 m plots for the experimental sites. In addition, three soil sampling points and one root sampling point were set in each plot for soil profile investigation and root survey. The geographical location and sampling method of the sample plot are shown in
Figure 1, and the basic information for the sample plots is given in
Table 1.
2.2. Soil Moisture and Meteorological Monitoring
To monitor the soil water dynamics in the locust tree plot, we embedded an EnviroSMART (Sentek Pty. Ltd., Stepney, SA, Australia) soil moisture monitoring systems (Sentek Inc, Stepney, SA, Australia) and measured the volumetric soil moisture within a depth of 200 cm below the surface. This system consisted of a PVC pipe, sliding rail, measuring probes (installed on the sliding rail), data collector, and accumulator. The measuring probes were set in the soil at an interval of 10 cm (between 0 cm and 100 cm) and at an interval of 20 cm (between 100 cm and 200 cm). The sensors operated on the frequency-domain reflectometry principle and measured the volumetric water content ranging from oven dryness to the saturation point with a resolution of 0.1%. We collected real-time soil volumetric moisture monitoring data every 30 min and stored the data in a CR200 data collector.
We placed a HOBO rain gauge (OneSet Inc., Bourne, MA, USA) in the open space outside the Robinia pseudoacacia forest observation site to measure the precipitation. The rain gauge was connected to a HOBO pendant event data logger, which recorded 0.226 mm per tip. We calculated the daily precipitation between 2014 and 2016 from the event data in the logger. We obtained meteorological factors, including the maximum temperature, minimum temperature, average temperature, solar radiation, and wind speed and direction from the automatic weather station at the National Field Research Station (OneSet Inc.), which recorded data at 30-min intervals.
2.3. Soil Hydraulic Parameters
The soil profile was excavated to a depth of 200 cm at the three soil sampling points in the
Robinia pseudoacacia forest. A total of 15 undisturbed soil samples were collected at intervals of 10 cm between 0 cm and 100 cm and at intervals of 20 cm between 100 cm and 200 cm. We used sample rings (250 cm
3) to measure the hydraulic conductivity and other soil physical properties in the laboratory, with three replicates from each layer. We used the Ku-pF apparatus measurement system (UGT Inc., Bavaria, Germany) in the laboratory to determine the hydraulic conductivity and the pF water characteristic curve [
27]. We conducted the soil particle-size analysis using a Laser Scattering Particle Size Distribution Analyzer (Microtrac Inc., Largo, FL, USA). The dry bulk density was calculated from the dry soil weight and the volume of the sampling rings (100 cm
3).
The hydraulic conductivity of the soil samples can be calculated using DARCY’s equation assuming quasi-stationary flow conditions. This assumes that hydraulic gradient of each sample in the sample ring as constant over the length of the sample. The gradient is formed from the matrix potential (tensiometer measurement) and the gravitational potential. The hydraulic conductivity was calculated as follows:
where
Vz is the flow velocity of the water movement;
k is the hydraulic conductivity;
is the hydraulic potential;
z is the location coordinates (upward was set as positive);
ψt is the tension of the top tensiometer(the actual pressure in the unsaturated state);
ψb is the tension of the bottom tensiometer;
Vm is the flow velocity in the sample center;
is the water volume that evaporates over the time;
is the measurement interval of an individual sample;
A is the cross-section of the soil sample ring;
is the height difference between the tension meters (3 cm); and
is the distance between the tensiometers in the sample ring (3 cm).
2.4. Root Measurements
We measured each of the black locust trees in the three experimental plots. We selected a representative wood with average tree height and crown width as the root sampling point by removing the litter around the standard wood and excavating the soil profile (north-south orientation) with a depth of 200 cm and a length of 250 cm beside the standard wood. We set 10 root sampling points at an interval of 20 cm and collected all of the roots distributed in the 0–200 cm soil profiles. The root sample was placed in a net bag, and the soil attached to the roots was rinsed off with clean water. We measured the length and biomass of the roots in each of the sampling points. The root distribution characteristics were mainly determined for use in Equation (10).
2.5. Model Simulation
2.5.1. HYDRUS-1D Modeling
The Hydrus-1D model is based on Richard’s equations and uses the Galerkin linear finite element method to spatially discretize the soil profile while allowing for time-variable boundary conditions [
28]. The model uses the implicit difference method for the time discretization, and the governing equation is as follows
where
θ is the volumetric water content (cm
3/cm
3);
h is the matric potential (cm);
t is the time;
K is the hydraulic conductivity function;
z is the spatial coordinate with the z axis oriented downwards; and
S is the water absorption rate of the root system.
The van Genuchten-Mualem model [
29] describes the variation of in
K(θ) with soil water content:
where
θr and
θs are the residual and saturated water contents, respectively;
h is the pressure head;
α,
n, and
l are empirical parameters; and
m = 1 − 1/
n (dimensionless).
2.5.2. Initial Conditions and Boundary Conditions
In this study, the initial conditions are:
where
h0 is the initial value of the pressure head in the soil profile (cm). It is assumed that the surface is the initial boundary of the recharge from precipitation.
There was no conspicuous surface runoff during the study period. The precipitation was the only water input in the model. The boundary conditions were the atmospheric conditions at the soil surface. We set the lower boundary condition for all of the cases in this study to be free drainage, which was suitable for the situation, that is, the water table was far below the bottom boundary of the soil column, and there was no groundwater recharge to the root growth zone. The upper boundary conditions were defined by the evaporation and precipitation. The potential evapotranspiration was partitioned into soil surface potential evaporation and potential transpiration from plants. We estimated the potential transpiration and evaporation using the Hargreaves equation [
30] and the daily values from the weather measurements (maximum temperature, minimum temperature, and solar radiation) obtained from the meteorological stations. The boundary conditions can be described as follows:
where
L is the depth coordinate of the soil surface and is equal to 200 cm at the maximum depth at which the soil dry bulk density and particle size distribution were measured and analyzed.
2.5.3. Root Water Absorption
We adopted Feddes’ function [
31] to simulate the water absorption process of the black locust root system:
where
b′(
z) is the relative root distribution function (dimensionless) and
α(
h) is a dimensionless water stress function.
Tp is the potential transpiration rate. To optimize the root water absorption,
α(
h) was set to 1 during the calibration period. The measured root data were used mainly in the
b′(
z) function. The
b′(
z) function [
32] is as follows:
where
Lr is the root length (cm).
2.5.4. Spatial and Temporal Discretization
The 0–200 cm simulated soil profile was divided into 15 layers according to the soil properties. The soil profile was divided into 100 units at equal intervals of 1 cm. Correspondingly, the soil profile has 201 nodes and 6 observation points (20 cm, 50 cm, 80 cm, 120 cm, 160 cm, 200 cm). The simulated period ranges from 1 April 2014 to 31 March 2016, i.e., 731 days. Time discretization was used in the simulation, and the interval of the time discretization was gradually adjusted according to the number of iterations of the convergence. The lower and upper optimal iteration ranges were 3 and 7, respectively; and the lower and the upper time step multiplication factor were 1.3 and 0.7, respectively. If the number of iterations needed to reach reached convergence at any time in a specific period exceeded the preset maximum value (generally range 10–50), then the iteration was terminated, and the period length was changed to /3 to repeat the iteration. The initial time interval was set to 0.0001 d, the maximum time step was set to 5 d.
2.5.5. Calibration and Validation
We divided the soil profiles into 15 layers, and the saturated water contents θs were calculated using the pF soil water characteristic curve measured for the soil samples in the laboratory. We estimated θr, Ks, and the empirical shape parameters n and α using the Rosetta Dynamically Linked Library (Salinity Laboratory of the USDA, California, USA) based on the neural network embedded in HYDRUS-1D from the data for the mechanical soil composition, soil bulk density, field water holding rate (the soil moisture content at −33 kPa), and saturated water content. Among them, θr, Ks, n, and α are fitted parameters, and the soil’s mechanical composition (sand, silt, and clay), θs, ρb, and field water holding rate are fixed parameters with specific values derived from measurements.
The initial values of the fitted parameters for each layer were estimated using the Neural Network Prediction embedded in the model, and then, the parameters were fitted by fitting the observations measured for this layer in the experimental plot. The parameters of the van Genuchten-Mualem Equation were finally determined. The optimization results are presented in
Table 2.
2.5.6. Assessment of the Goodness of Fit
We compared observed field measurements with the results of the HYDRUS-1D simulations using the Nash-Sutcliffe model efficiency (
NSE), mean absolute error (
MAE), and root mean square error (
RMSE). Each of these values was calculated as follows:
where
Oi and
Pi are the observed and model-simulated values in the units of the particular variable;
is the measured average value for the soil layer; and
N is the number of observations.
3. Results
3.1. Hydro-Meteorological Conditions
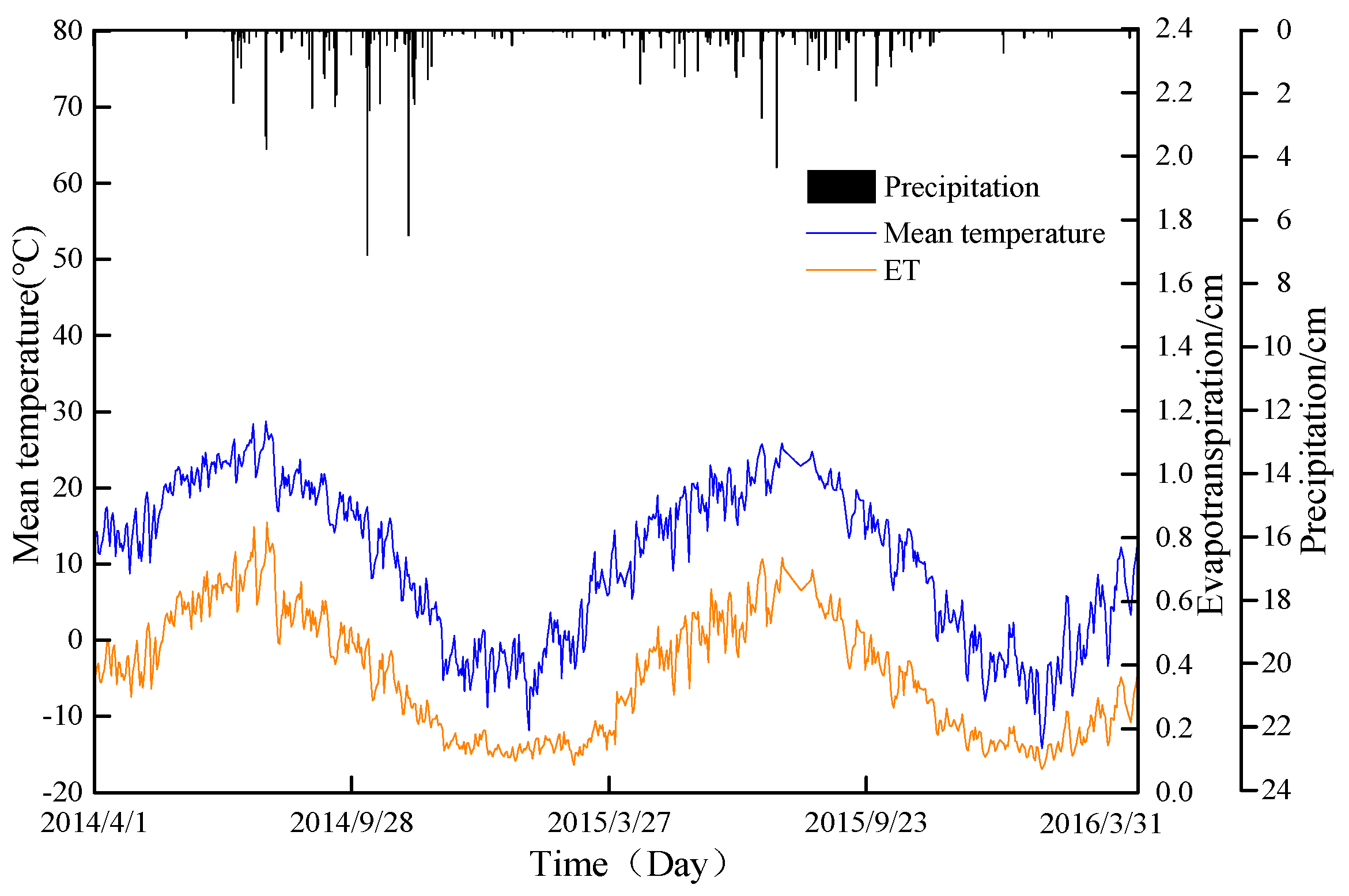
An overview of the hydroclimatic conditions across the study is given in
Figure 2, which presents the daily distribution of the evapotranspiration, precipitation, and mean temperature from 1 April 2014 to 31 March 2016. The two years of continuous observations revealed the seasonal characteristics of the precipitation and meteorological parameters. The average precipitation in the selected catchments during this period was 559.6 mm, and the seasonal rainfall mainly occurred from July to September, accounting for 59.4% of the total. The precipitation from 1 April 2014 to 31 March 2015 was 652 mm, and the precipitation from 1 April 2015 to 31 March 2016 was 455 mm. The two different precipitation years represented different hydrological years in the loess region, namely, the wet year and the dry year. The average annual actual evapotranspiration was 524.5 mm, and the evapotranspiration from July to September was 173.3 mm, accounting for 33% of the total. The mean air temperature during the selected period was 10.74 °C, ranging from −14.2 to 28.7 °C, and the evapotranspiration was consistent with the trend in air temperature.
3.2. Soil Water Dynamics
The observed soil water dynamics in the typical soil layers are illustrated in
Figure 3. The observed soil water contents in all of the soil profiles exhibited obvious seasonality during the two complete years from 1 April 2014 to 31 December 2016 (
Figure 3). At the beginning of the rainy season, the antecedent average soil water content of the entire soil layer (0–200 cm) was only 14.01%. In the course of the rainy season, the soil water content exhibited a distinct increasing trend, especially during the continuous rainy periods.
In addition, there were significant differences in the soil water content at different depths after rainfall. The soil surface moisture, especially the parts above 80 cm, was more sensitive to rainfall events with high amounts and intensities, and the soil water content ranged from 13.8% to 36.7%. During the observation period, there were three large-scale rainfall events in 2014, and the total precipitation was 71.1 mm, 123.6 mm, and 126.6 mm during these events. The soil water increments within 80 cm during the three rainfall events increased by 8.27%, 10.36%, and 13.24%, but the increase in the average soil water content between 100 cm and 200 cm was insignificant (less than 1%). The infiltration of the rainwater rapidly increased the water content of the surface soil, while the water content of the deep soil was low at that time. At the end of the rainy season, the soil water content decreased significantly within a few weeks. In particular, in the 10–50 cm soil layers, the soil water content decreased from 31.2% to 19.8% in 28 days. However, the soil moisture in the deep soil layers decreased at a very slow pace, and the soil dried out at a low rate throughout the dry season.
3.3. Optimization of the Model Parameters
We optimized the soil hydraulic parameters of the
Robinia pseudoacacia forest using the Hydrus model. We used the measured dataset from 1 April 2013 to 31 October 2013 for the model calibration, and the dataset from 1 April 2016 to 31 October 2016 for the validation. The parameter optimization process aims to satisfy the convergence criterion, and it mainly optimized the empirical shape parameters:
n,
α, and
Ks. We used the calibrated hydraulic parameters (
Table 2) to simulate the soil water dynamics from 1 April 2014 to 31 March 2016.
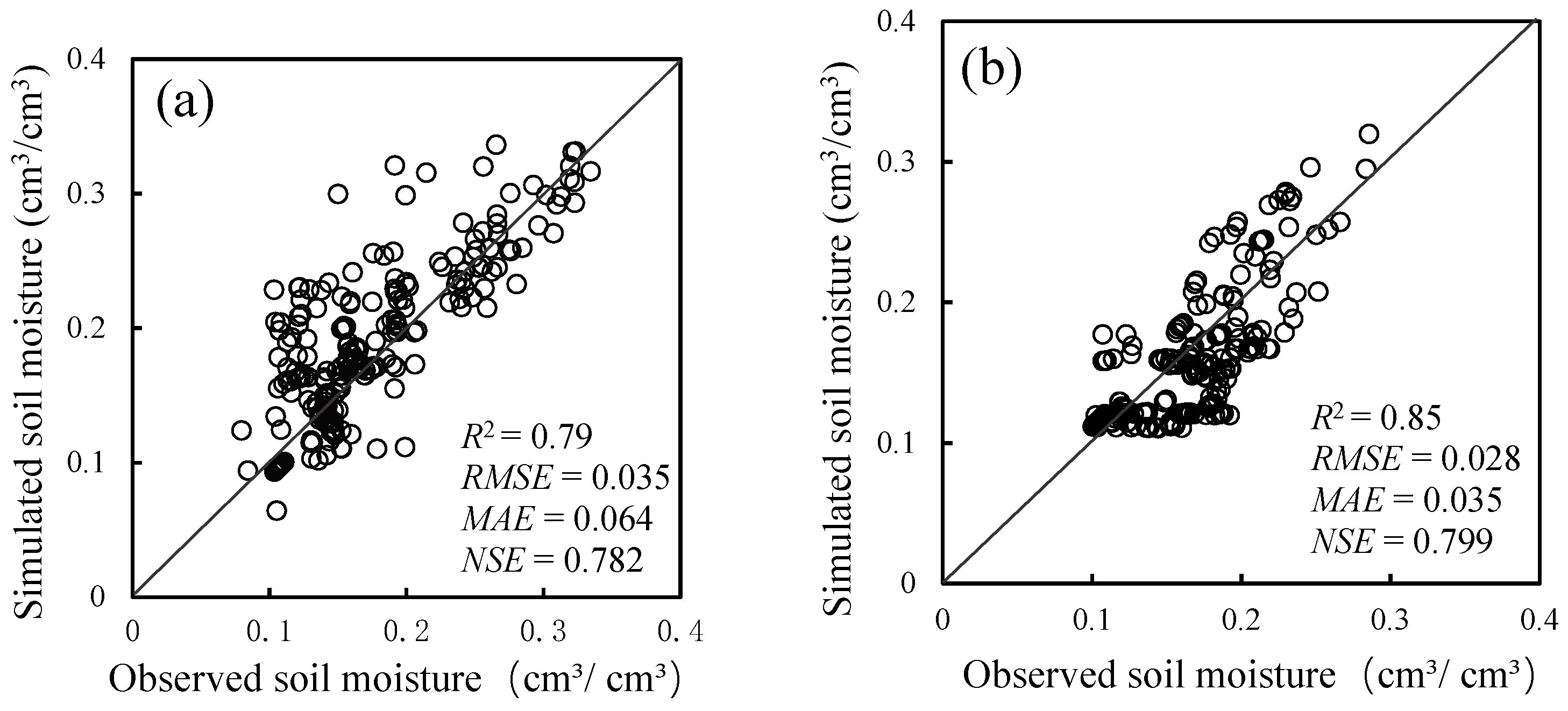
To analyze the accuracy of the HYDRUS-1D model, we compared the soil moisture observation data with the simulated data during the calibration period and the verification period (
Figure 4). During the calibration period (
Figure 4a), the data points tended to be distributed above the y = x line, indicating that the simulated water content was slightly higher than the measured water content; during the validation period (
Figure 4b), the data tended to be distributed below the y = x line, indicating that the simulated value was slightly lower than the observed values. The evaluation index results for the calibration and validation periods showed that the
R2,
NSE,
RMSE, and
MAE values of the calibration period were 0.79, 0.782, 0.035, and 0.064, respectively, and the
R2,
NSE,
RMSE, and
MAE values for the validation period were 0.85, 0.799, 0.028, and 0.035, respectively. The evaluation results for the verification period showed that the simulation process had a slight improvement and optimization. In most studies that used the Hydrus-1D to simulate the soil water dynamics in the Loess Plateau, the
R2 and
RMSE values were mostly 0.7–0.84 and 0.015–0.063, respectively, when optimizing the hydraulic parameters [
21,
33]. When calibrating the hydraulic parameters in this study, the
R2 was 0.85, the
RMSE was 0.028, and the evaluation index values were both within the range of the noted evaluation index results, indicating that the effectiveness of the model was acceptable, and the simulation values were in good agreement with the observed value. Thus, the optimized hydraulic parameters were appropriate for the simulation of soil water movement in the study area.
3.4. Simulation Accuracy of Soil Moisture Dynamics
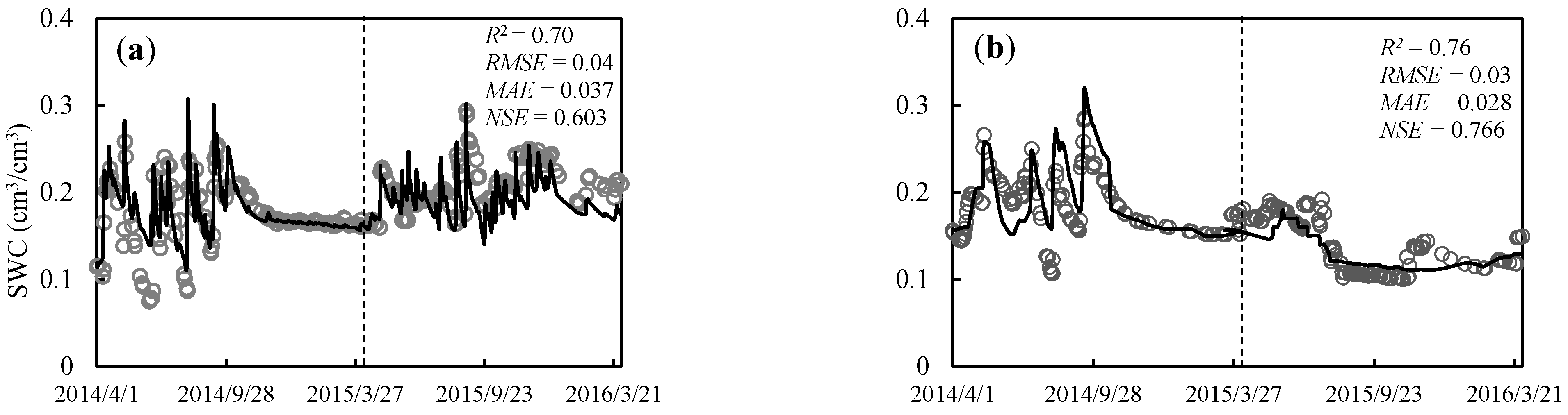
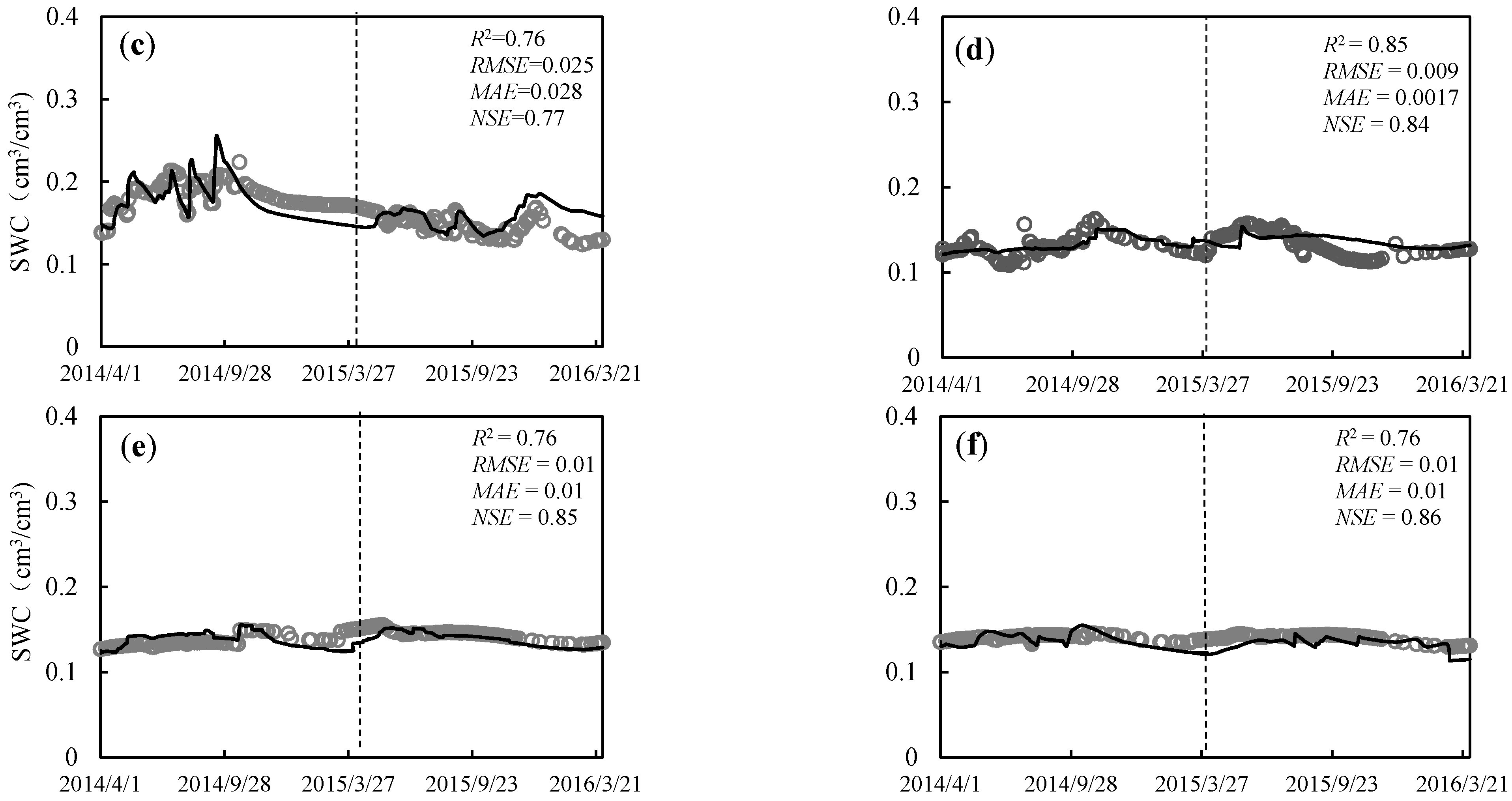
We simulated the dynamic variations in the soil water content in the different soil layers of the forest using the HYDRUS-1D model and compared the simulated values and the measured soil water contents (
Figure 5). It was evident that the dynamic variation in the simulated water contents of the soil profiles was consistent with the dynamic trend of the measured water contents. The range of the evaluation index results for the comparison between the simulated and measured water contents of each layer in the 0–200 cm soil profiles was as follows:
R2 of 0.7–0.93,
NSE of 0.60–0.86,
RMSE of 0.009–0.04, and
MAE of 0.07–0.037. These results indicated that the simulated values for the different soil layers agreed well with the measured values. The average
R2,
NSE,
RMSE, and
MAE values for 0–80 cm were 0.72, 0.75, 0.032, and 0.031, respectively, indicating that the goodness of fit between the simulated and measured values in the shallow soil was slightly lower. In the 160–200 cm soil layer, the
R2 and
NSE values increased to 0.89 and 0.86, respectively, whereas both the
RMSE and
MAE decreased to 0.01, indicating that the model simulated the dynamics of the water content in the deep soil layer better. During the plant-growing season (May to September 2014), the average
R2,
NSE,
RMSE, and
MAE values in the 0–200 cm soil profiles reached 0.7, 0.77, 0.03, and 0.03, respectively; in the non-growing season (December 2014 to March 2015), the average
R2,
NSE,
RMSE, and
MAE values were 0.81, 0.84, 0.02, and 0.02, respectively. The evaluation results showed that the fitting precision in the plant-growing season was slightly lower than that in the non-growing season. In addition, we also found that during the precipitation period, the change in the simulated soil water contents of the 20 cm, 50 cm, and 80 cm soil layers had a hysteresis deviation compared with the measured soil water contents, Turkeltaub et al. [
34] discovered that the simulated water content during the arrival of the wetting front is always higher than the measured water content, but this variation was observed only in the shallow soil layers.
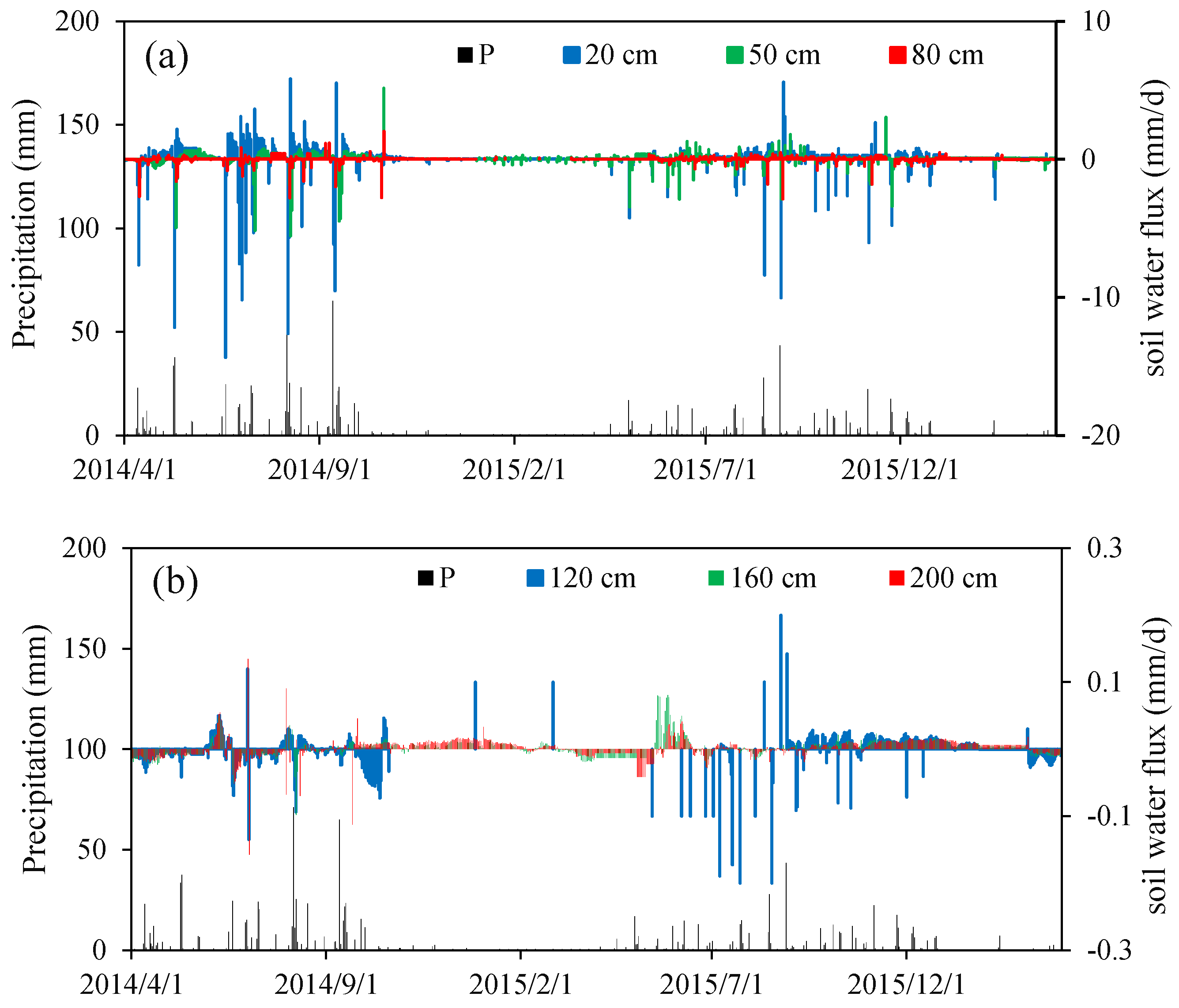
3.5. Dynamics of the Water Flux and Estimation of Water Infiltration and Consumption
The soil water flux is the amount of water passing through the soil layer per unit time, and the soil surface was taken as the reference plane in this study. The water flux was negative when the water infiltrated and moved downward during precipitation, and it was positive when the water moved upward during evaporation. The higher the absolute value of the water flux, the greater the amount of water passing through a particular soil layer. Two hundred and one simulation nodes were set at 1 cm intervals in the 0–200 cm soil layer in the model, and observation nodes (N ≤ 10) were set at 20 cm, 50 cm, 80 cm, 120 cm, 160 cm, and 200 cm, respectively, to simulate and calculate the water fluxes at the corresponding nodes. The responses of the water fluxes to rainfall in the different soil layers are plotted in
Figure 6. The soil water flux in the shallow soil layer (0–80 cm) had a change pattern similar to that of precipitation, but there were differences in the degree of influence of the different rainfall amounts on the soil water flux. During the precipitation period, the values of the water fluxes of each soil layer gradually became negative from the surface layer to the deeper layers with the arrival of the wetting front, and the 0–80 cm layers were the most sensitive to precipitation. The water flux in the deep soil (160 cm and 200 cm) was relatively stable, and the annual average water flux was only 0.002 mm/d (negative value); however, it was replenished only when heavy rainfall occurred. The water flux in the deep soil is usually related to the cumulative amount of infiltration. After a long duration of heavy rainfall, the water flux of the deep soil gradually increased in the days after the rainfall ended. The time it took for the rainwater infiltration to travel from the surface layer to the 200 cm soil layer generally was greater than 10 days.
Table 3 shows a balanced situation of rainfall infiltration and soil water loss at the plot scale in the
Robinia pseudoacacia forest during the simulation period. I and II represent hydrological years with precipitation of 652 mm and 455 mm, respectively (
Table 3). During simulation period I, the upward and downward soil water fluxes within the 0–200 cm soil layer were 0.14 cm/d and 0.16 cm/d, respectively, that is, the evapo-transpiration and of the water that infiltrated into the soil were 524.6 mm and 616.8 mm, respectively. A total of 87.8% of the rainwater infiltrated into the soil and participated in the water cycle. The water surplus within the 0–200 cm soil layer in this hydrological year was calculated to be 92.2 mm, and the increase in the soil water storage was 64.05 mm. The percolation rate in the 200 cm soil layer was 0.077 mm/d, implying that 28.1 mm of this surplus infiltrated into the deeper soil horizons, and was potentially available for groundwater recharge.
During simulation period II, the upward and downward soil water fluxes within the 0–200 cm soil layer were 0.1 cm/d and 0.11 cm/d, respectively, that is, the water consumption and water infiltrated into the soil were 374 mm and 401 mm, respectively, so it can be calculated that the water surplus in the 0–200 cm soil layer in hydrological year I was 27 mm. The percolation rate at 200 cm was 0.0056 mm/d, which meant that only 2.04 mm of the soil surplus infiltrated into the deep soil water. Of this amount, 25 mm were used to increase the water storage and only 2 mm were used to recharge the water below 200 cm. A total of 90% of the rainwater that infiltrated into the soil was used for plant transpiration and soil evaporation during the two hydrological years, which led to a small soil water recharge below 200 cm, but the water cycle within the 0–200 cm soil layer was generally in dynamic equilibrium. Note, however, that during years with below-average multi-year precipitation (579 mm), although the soil water storage in the 0–200 cm soil layer still increased, the increment corresponded to only about a 1% increase in the soil volumetric water content. Thus, the soil layers below 200 cm must be in a state of excessive depletion because the amount of water that infiltrated from the upper soil layers was limited, but the specific amount of depletion need to be further explored.
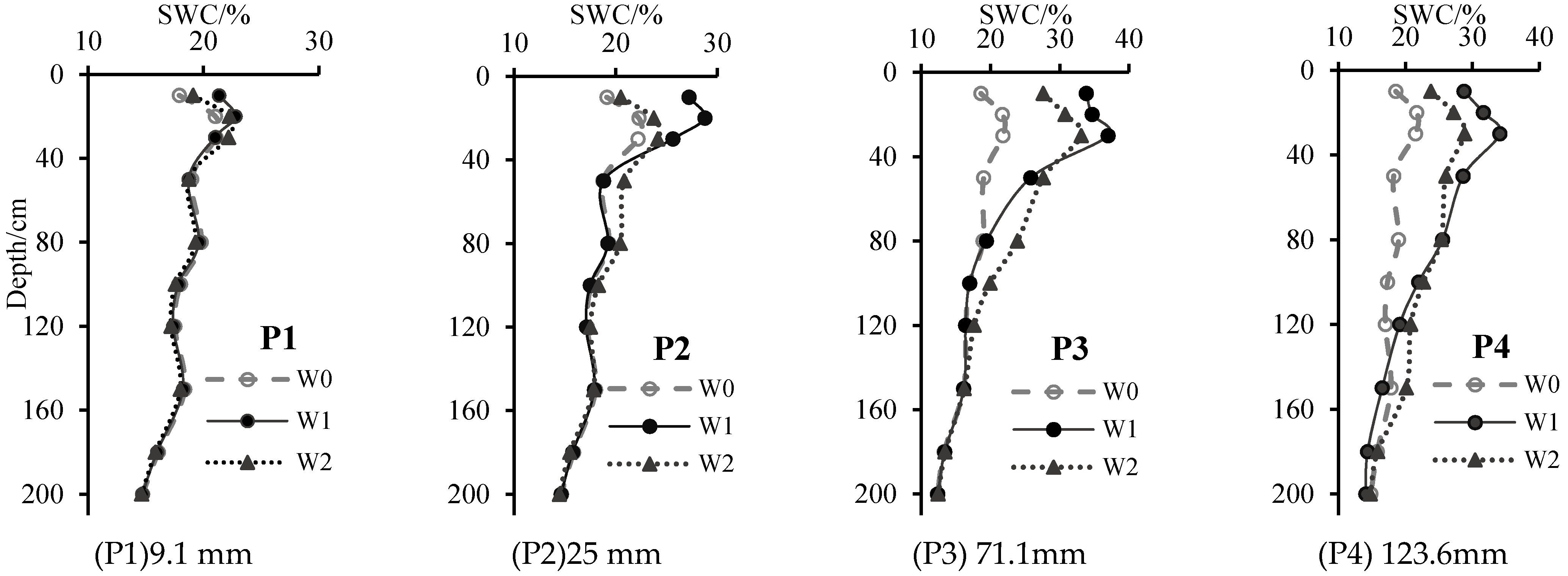
3.6. Simulation of Soil Water Movement under Different Rainfall Conditions
We found differences in the soil water flux changes under different rainfall conditions (
Figure 6). To explore the effects of different rainfall conditions on soil water movement, we selected four different single rainfall events that occurred in summer and autumn to simulate the soil water dynamics before rainfall (W0), at the end of rainfall (W1), and 24 h after the end of the rainfall (W2). The amounts of precipitation during the four rainfall events were P1 (15 June 2014, light rain: 9.1 mm), P2 (19 June 2014, medium rain: 25 mm), P3 (6 August 2014, heavy rain: 71.1 mm), and P4 (12–15 September 2014, very heavy rain: 123.6 mm). The rainfall durations of the four rainfall events were 1.5 h, 7 h, 29 h, and 51 h, respectively. The simulation results showed that the increase in rainfall caused a direct increase in the infiltration depth, the amount of rainwater infiltration, and the increment of the soil water content. The depths and amounts of rainwater infiltration varied significantly at different soil depths after 24 h after the end of the rainfall (
Figure 7). The four different rainfall amounts infiltrated to the 20 cm, 50 cm, 80 cm, and 140 cm soil layers, respectively, when the rainfall had just ended. In addition, the increment of the soil water content increased by 11.7%, 42.3%, 61.9%, and 68.7%, respectively. Twenty-four hours after the rainfall ended, the infiltration depth for the 9.1 mm and 25 mm rainfall events infiltrated to depths of 30 cm and 100 cm, respectively, indicating that light and medium rainfall caused an increase in soil water in the surface layer (0–30 cm) and the shallow layer (0–100 cm), respectively. In contrast, the infiltration depths of the 71.1 mm and 123.6 mm rainwater events reached depths of 160 cm and 200 cm, respectively. We found that only the P4 rainfall event caused a response in the soil water in the deep layer below 200 cm. Under the conditions of the four rainfall events with different amounts of precipitation, the amounts of rainwater infiltration were 8.08 mm, 19.30 mm, 65.19 mm, and 95.27 mm. The infiltration amounts of the four rainfalls accounted for the total rainfall in the order of P3 (91.82%), P1 (88.79%), P2 (77.2%), and P4 (77.08%).
5. Conclusions
We simulated the spatiotemporal movement of soil water in a Robinia pseudoacacia forest established by the GFGP in the loess area using the HYDRUS-1D model. We also investigated transport and replenishment of the soil water in the root zone under different rainfall events. The model with the calibrated parameters described the soil water movement process in the 200 cm root zone of the forest better. In this model, the growth season and the deep soil had a better fit in terms of the water movement dynamics. Precipitation, root distribution characteristics, and soil texture were the main factors that affected the accuracy of the simulation. In addition, the numerical simulation of water flow under different rainfall events enabled us to understand the main infiltration mechanism in the forestland in the loess area. The interannual variation in the soil water flux was significant, and it was strongly dependent on the soil depth, time distribution, and seasonal rainfall. The depth and amount of rainwater infiltration were proportional to the amount of rainfall. Furthermore, the response of the deep soil water to rainfall infiltration exhibited a lag effect when the water infiltrated through the entire soil profile (0–200 cm), and the lag period was at least 10 days. The active layer of the rainwater infiltration and the soil water flux transfer in the study area was distributed mainly in the soil layer above 120 cm, which effectively promoted the absorption of water by plant roots. However, when the annual rainfall was less than 455 mm, the deep soil of a Robinia pseudoacacia forest may suffer from water shortages, especially from June to September, causing the root system to use the deeper soil water, and leading to the development of dry soil layers. Four hundred and fifty-five millimeters may be the limit for the formation of a dry soil layer.
The results of this study improve our understanding of the infiltration mechanism of one-dimensional water flow in unsaturated soils, and provide a basis for evaluating the characteristics of water infiltration and wetting front migration in the loess area. However, this research did not consider two aspects: (1) the soil water movement in the soil layer below 200 cm; and (2) whether the time scale during our research could influence the accuracy and representativeness of the research results. Therefore, our future research the percolation below 200cm will be tracked, and the time scale of the study will be increased.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}