1. Introduction
Estuaries are one of the most important interconnections between land and sea. They are frequently important areas for leisure and economic activities. Estuaries are also ecosystems that are very susceptible to pollution and environmental disturbances and must be adequately preserved. In estuaries, rivers and oceans interact through a number of intricate phenomena: exchange of water of different densities, sediments, pollutants, nutrients, organic matter, and biota. Therefore, it is necessary to have a better understanding of the hydrodynamics of estuaries and coasts in order to effectively assess and monitor the environment quality in these regions and to predict coastal evolution [
1]. It takes appropriate methodologies combining theoretical analysis and modeling studies to anticipate the hydrodynamics of estuaries and coasts, which are caused by complicated mechanisms linking mass exchange to heat transfer processes [
1].
Recently, several research studies were conducted to investigate the hydrodynamics of estuaries [
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12]. Many driving conditions, such as river flow characteristics, tidal amplitude, sediment properties, surges, waves, currents, and bathymetry, affect the dominant physical processes in an estuary. The primary sources of energy input into estuaries are typically tides, surges, and waves. Wave dispersion in shallow water is significantly impacted by the change in bathymetry, leading to refraction, diffraction, reflection, and shoaling. Natural beaches and manmade coastal structures that reflect waves can have a significant impact on the hydrodynamic structures and, consequently, the transport of sediment in front of the reflector [
13]. According to Chang and Hsu [
13], the prediction of wave reflection coefficients is still a challenging task. Before marine structures are created, wave reflection at them is typically evaluated with physical models for engineering practice. Incident waves are also reflected by the sloping bathymetry. The drag coefficient estimation is complicated by the superposition of incident and reflected waves (due to the variation in bathymetry and the existence of any natural or man-made structures). In their study, Chang and Hsu [
13] compiled many approaches for predicting the reflection coefficient of the waves suggested in the literature and highlighted their limitations. Most of these methods, according to the authors, are ineffective at predicting the reflection coefficients of waves on a bed with arbitrary or natural bathymetry. Based on a linear wave shoaling theory (without considering wave breaking), determining changes in wave height and phase due to bathymetry variations, Chang and Hsu [
13] proposed a simple frequency-domain method for separating incident and reflected waves to account for normally incident linear waves propagating on an inclined bed with arbitrary 2D bathymetry. According to the authors, their method is applicable to both laboratory and field conditions predominantly for normal shores on which deep-water waves are propagated.
In intermediate and shallow waters, waves from deep waters begin to interact with the seabed, undergoing various transformations. These transitions are the results of many phenomena, for example, refraction, diffraction, reflection, shoaling, breaking, and swash. Wave prediction is of crucial importance to human activities as it provides useful information for many coastal engineering applications such as the coastal protection, environmental monitoring, navigation, safe port management, and good control of recreational activities in popular coastal areas [
14]. Both observational and measurement data, as well as physical and numerical models, are often used to assess extreme marine events around the world [
15]. Chi and Rong [
15] confirmed that long-term in situ observations can accurately estimate the sea level variation but are usually spatially limited. The authors also indicated that many numerical models have been developed and validated to reproduce the spatial and temporal variation of wave spreading and uncover the underlying dynamics. The sea wave motion is strongly nonlinear and greatly influenced by many factors, i.e., the seabed, wind velocity, current circulations, and induced radiation stress. The interaction of the waves with different factors leads to complex hydrodynamic behaviors, making their numerical simulation very uncertain, which always requires validations using measured data.
The Simulating Waves Nearshore (SWAN) model is one of the most very popular wind–wave models [
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27], used by many government organizations, research institutes and consulting companies worldwide, to predict the size and forces of waves, allowing for changes in wave propagation from deep water to the surf zone [
14]. Based on SWAN manuals and as outlined in Lin [
14], the model’s primary function is to resolve the spectral action balance equations, which represent the effects of spatial propagation, refraction, shoaling, generation, dissipation and nonlinear wave–wave interactions, without imposing any a priori constraints on the spectral evolution of wind waves. Hoque et al. [
16] applied the SWAN model to forecast storm wave conditions in the shallow nearshore region off the Mackenzie Delta in the Canadian Beaufort Sea. The standard setup for the SWAN model was implemented by the authors, comparing different methods for quantifying the wave whitecapping dissipation. Hoque et al. [
16] found that, after examining the bottom friction effects and triad interactions in predicting shallow-water waves, the simulated results in terms of significant wave heights and peak period are in good agreement with the observed data. Amunugama et al. [
17] analyzed wind waves with SWAN on structured mesh and unstructured mesh during the arrival of a typhoon. After comparing the simulated results with measured data, they confirmed that the wind–wave characteristics obtained by both approaches (structured SWAN and unstructured SWAN) were substantially consistent with some advantages of unstructured SWAN, especially in complex geometries. The authors recommended the combination of both approaches where necessary. Due to a lack of time-series wave data, Gorman et al. [
19] have used SWAN and wind data to hindcast the generation and propagation of deep-water waves incident on the New Zealand coast over a 20-year period (1979–1998). The SWAN model was also used to analyze spatial and temporal variations in cold front events [
20], predict waves generated by cyclones [
21], simulate wave characteristics at shorelines [
22,
24], and estimate wave energy potential [
23], etc.
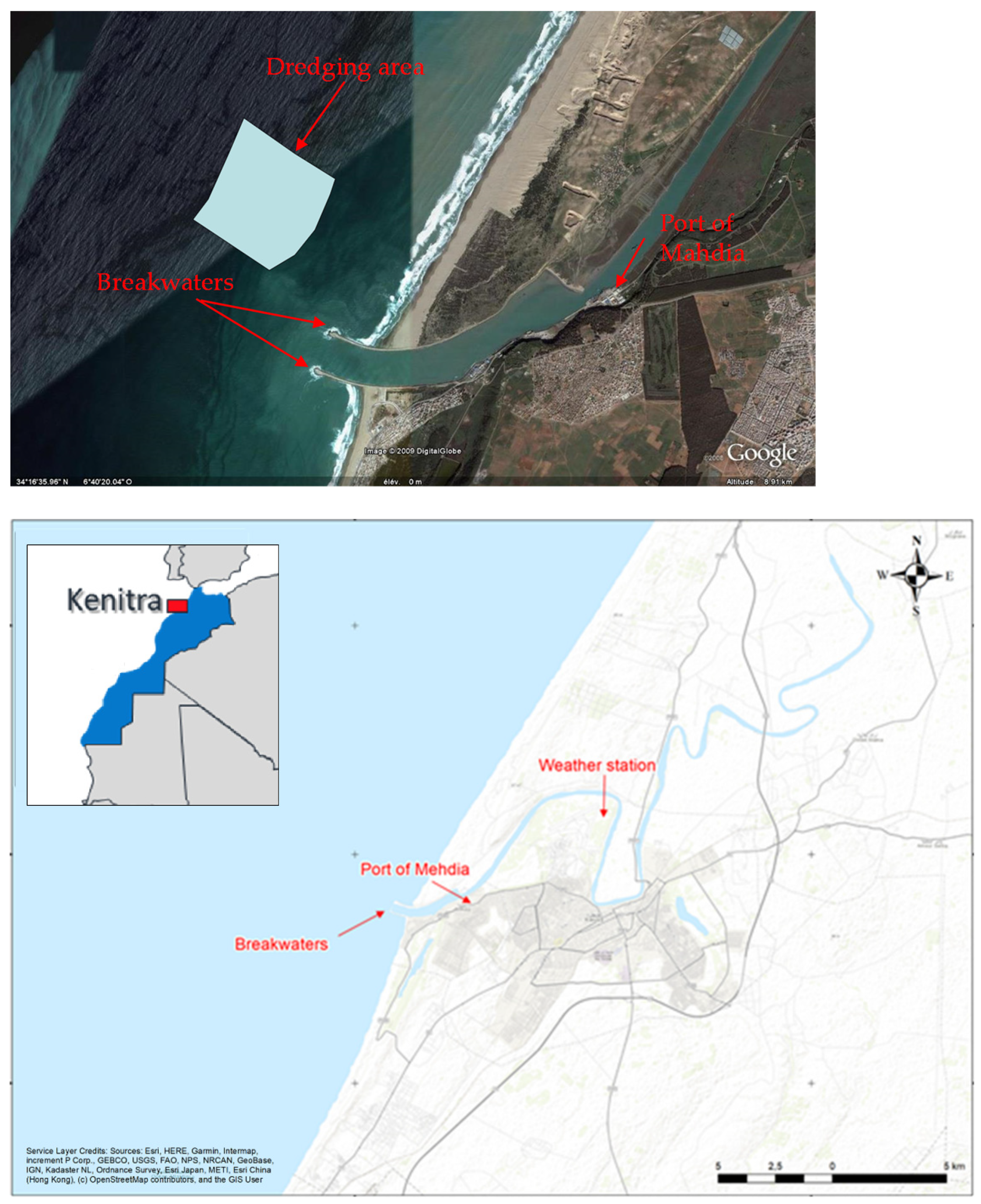
This study aims at investigating the effect of extreme dredging depths (due to sand extraction) on the wave characteristics in the Oued Sebou estuary, located in the Kenitra region on the north Atlantic coast of Morocco by applying the SWAN model (Cycle III version 41.20). The wave hydrodynamic characteristics around the river outlet were examined. The dredging impact on wave dispersion, bottom friction velocity field, flow agitation in the river, and stress on the structures housing the estuary and wave energy budget (before breaking) were extensively analyzed.
3. Model Theoretical Formulation
The selected SWAN model is a spectral numerical model designed to simulate waves evolving in coastal regions, lakes, and estuaries under defined wind, bathymetry, and current conditions. It is based on the Energy Density Balance equation linking the advection term to the source and sink terms. Therefore, the wave energy evolves in both geographic and spectral space and changes its aspect due to the presence of wind at the surface, friction with the bottom, or during the breaking of the waves. The SWAN model is a stable model based on unconditionally stable numerical schemes (implicit schemes).
SWAN, in its third version, is in stationary mode (optionally non-stationary) and is formulated in Cartesian or spherical coordinates. The unconditional numerical stability of the SWAN model makes its application more effective in shallow water.
In SWAN, the waves are described with the two-dimensional spectrum of the wave action density
N,
where
x and
y are the horizontal components of geographic space,
σ is the relative frequency,
θ is the wave direction, and
E is the energy density.
The spectrum considered in the SWAN model is that of the wave action density
N (
σ,
θ) rather than the spectrum of the energy density
E (
σ,
θ). This is because, in the presence of currents, the wave action density is conserved while the energy density is not [
27].
Because wave action propagates in both geographic and spectral space under the influence of genesis and dissipation terms, wave characteristics are described in terms of two-dimensional wave action density. The action density spectrum balance equation relating the propagation term to the effects of the source and sink terms, in Cartesian coordinates, is [
28]
On the left-hand side of Equation (2), the first term represents the local temporal variation of the wave action density, the second and third terms represent the propagation of wave action in the geographical space of velocities
Cx and
Cy, the fourth term represents the shifting of the relative frequency due to variations in bathymetry (with propagation velocity
Cσ) and currents (with propagation velocity
Cθ), and the fifth term represents the refraction induced by the combined effects of depth and currents. It is worth mentioning that
Cx,
Cy,
Cσ,
Cθ propagation velocities were obtained from linear wave theory. The term in the right-hand side of Equation (2) represents processes that generate, dissipate, or redistribute wave energy, and
S can be expressed as [
24]
where
Sin is the wind energy input. The dissipation term of wave energy is represented by the contribution of three terms: the whitecapping
Swc, bottom friction
Sbot, and depth-induced breaking
Sbrk. Snl4 and
Snl3 represent quadruplet interaction and triad interactions, respectively.
Adopting a finite difference scheme for each of the five dimensions: time, geographic space, and spectral space made the numerical implementation in SWAN effective. The following guidelines must be followed in order to obtain the discretization adopted at the SWAN model level for numerical computation: (i) time of a constant and identical time step Δt for the propagation term and the source term, (ii) geographical space of a rectangular grid with constant spatial steps Δx and Δy, (iii) spectral space of a constant directional step Δθ and a constant relative frequency step Δσ/σ; (iv) frequencies between a fixed minimum maximum values of 0.04 Hz and 1 Hz, respectively, unlike the WAM and WAVEWATCHIII models, which use dynamic values, and (v) as an option, the direction θ can also be delimited by the minimum and maximum values θmin and θmax.
5. Results and Discussion
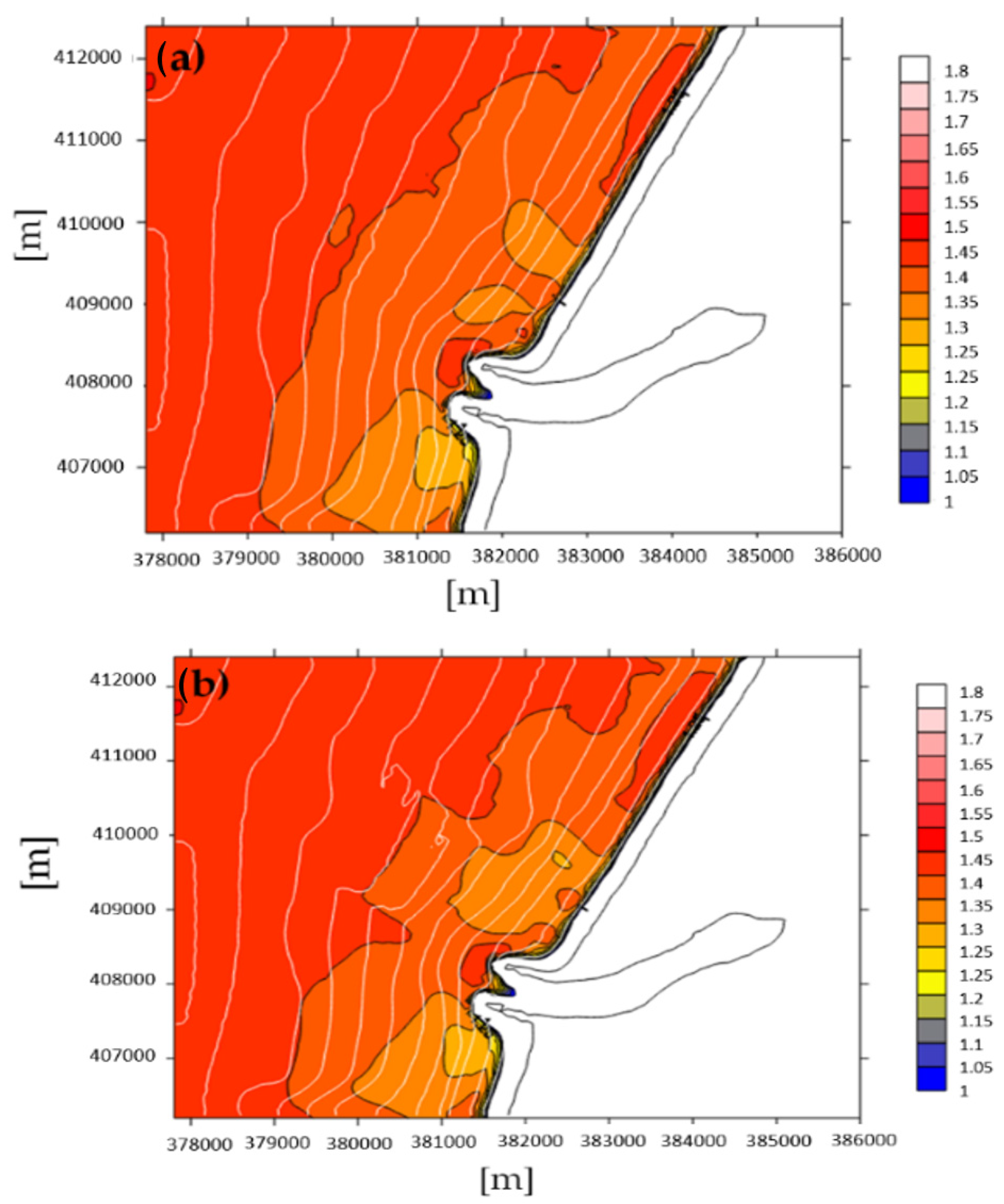
As an illustration,
Figure 6 depicts the simulated outcomes of the local significant wave height (
Hs) distribution, before (with current bathymetry), as shown in
Figure 6a, and after dredging of 2 m, as shown in
Figure 6b. The data illustrated in
Figure 6 refer to case 3 (
Table 2) of significant wave height in deep water
Hs0 = 1.5 m and a period
Tp = 8 s.
The results show that the presence of the dredging affects the wave dispersion. There was an increase in
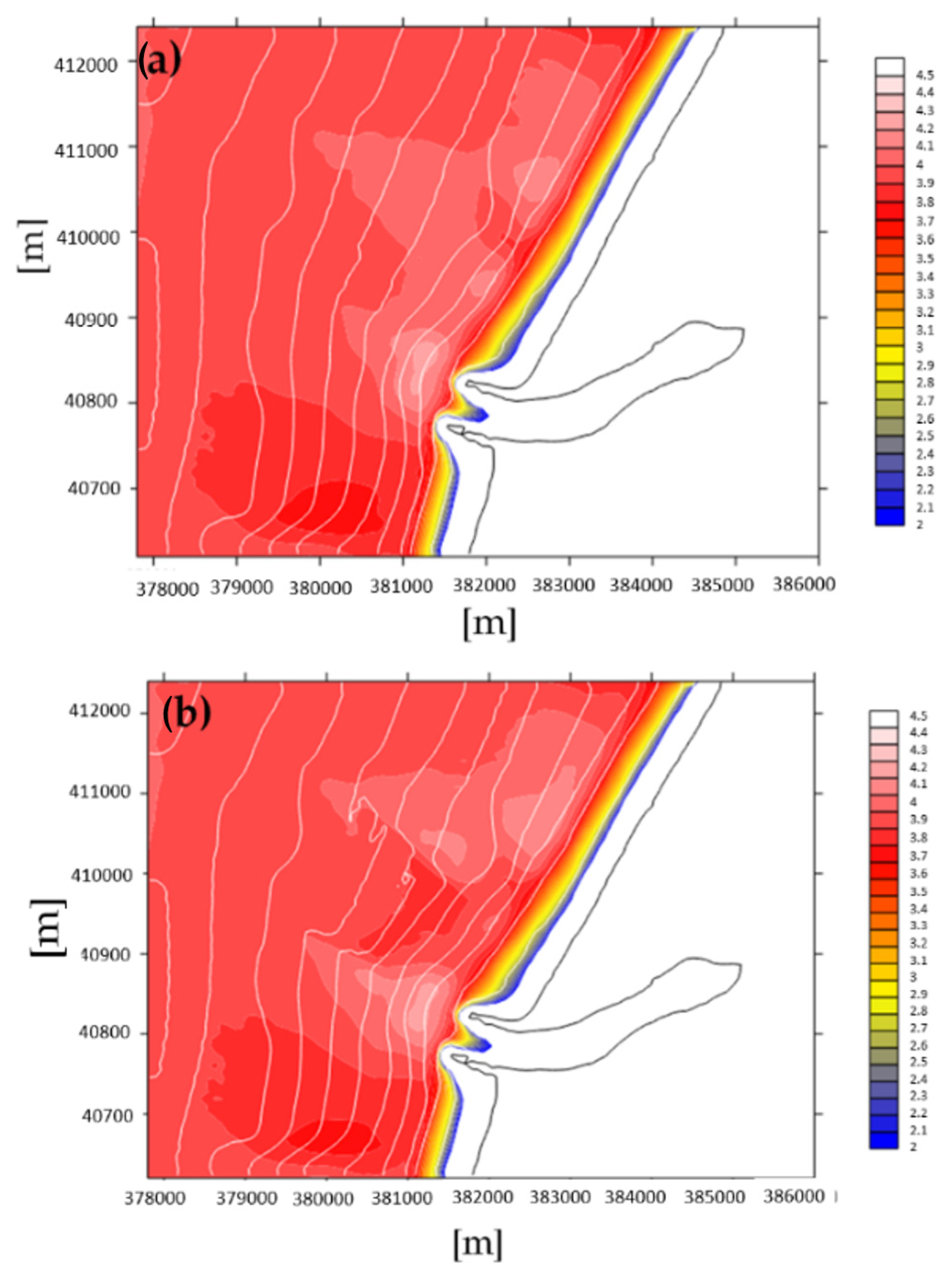
Hs in and at the edges of the dredging area, which can be explained by the sudden increase in the water depth. In general, the simulations show a decrease in the transfer of wave energy out of the extraction zone, causing a lateral energy flow with respect to the excavation. The waves propagating across the excavation area tend to refract toward the areas of shallow water along the edges, increasing the wave heights (known as wave energy focusing). In terms of wave amplitude, there is a modest decrease downstream (in the wave propagation direction) of the excavation and a slight increase inside it and on its sides. This behavior is also confirmed with extreme waves, as shown in
Figure 7. In
Figure 7, the data of
Hs refer to case 8 (
Table 2) of
Hs0 = 4 m and a period
Tp = 12 s, simulated with and without the dredging of 2 m depth.
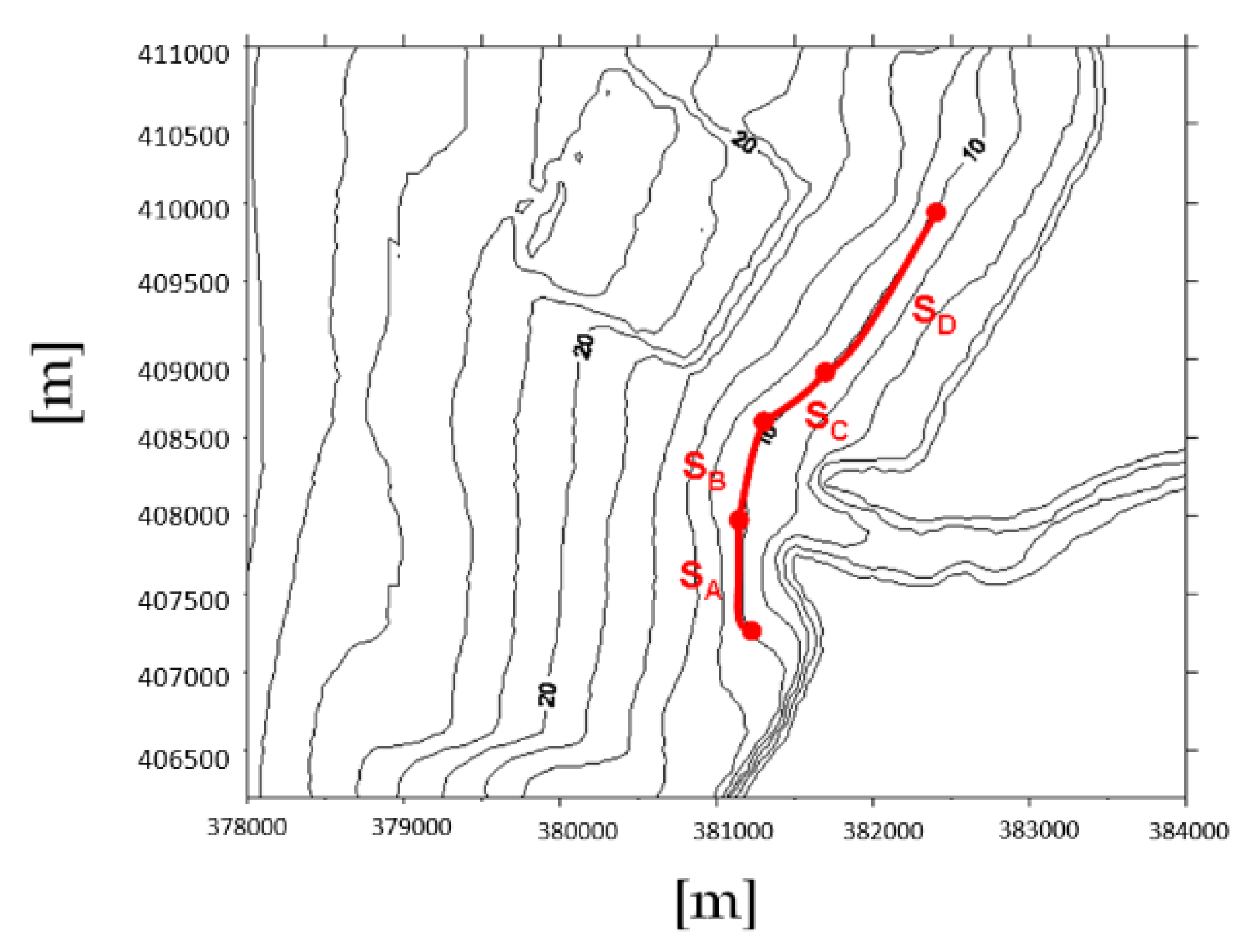
To evaluate the impact of dredging on the estuary environment, two indicators have been considered: (i) impact on sediment transport processes, where the analysis focuses on the evolution of the bottom friction velocities, responsible for the movement of sediment particles and proportional (velocity squared) to the erosion rate, and (ii) impact on structures, where the analysis focuses on the variation of the energy before the wave breaks, at each concerned zone (
Figure 5). For this final point, the impact of the significant heights (squared), measured at the bathymetry of 10 m, and on each of the four selected areas was integrated. In practice, the values of
Hs2 determined at different locations S
A, S
B, S
C, and S
D (
Figure 8), along the isobath of 10 m, were performed to indicate the wave energy impact on the selected zones, as shown in
Figure 5. A comparison was made between relative configurations with and without dredging.
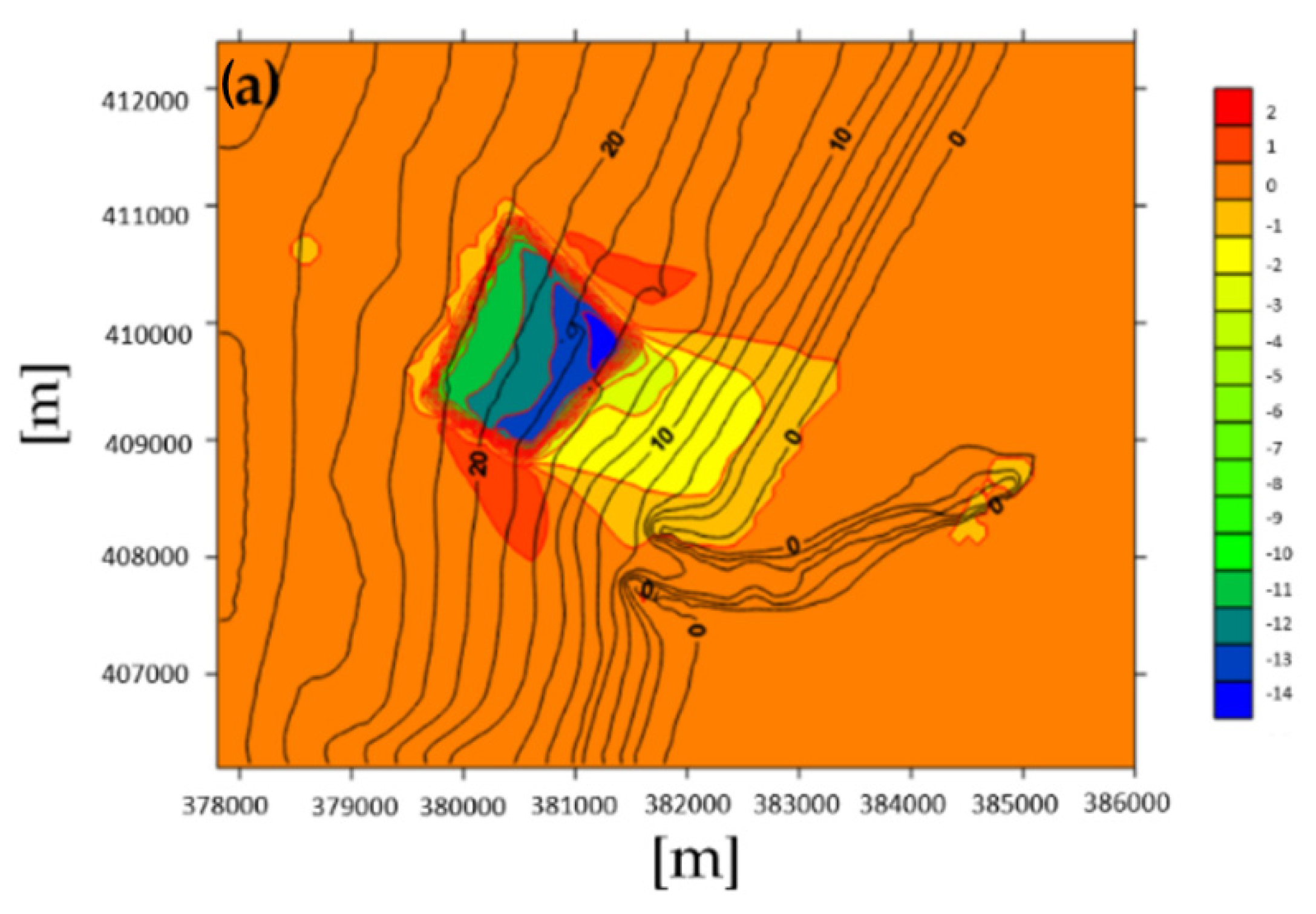
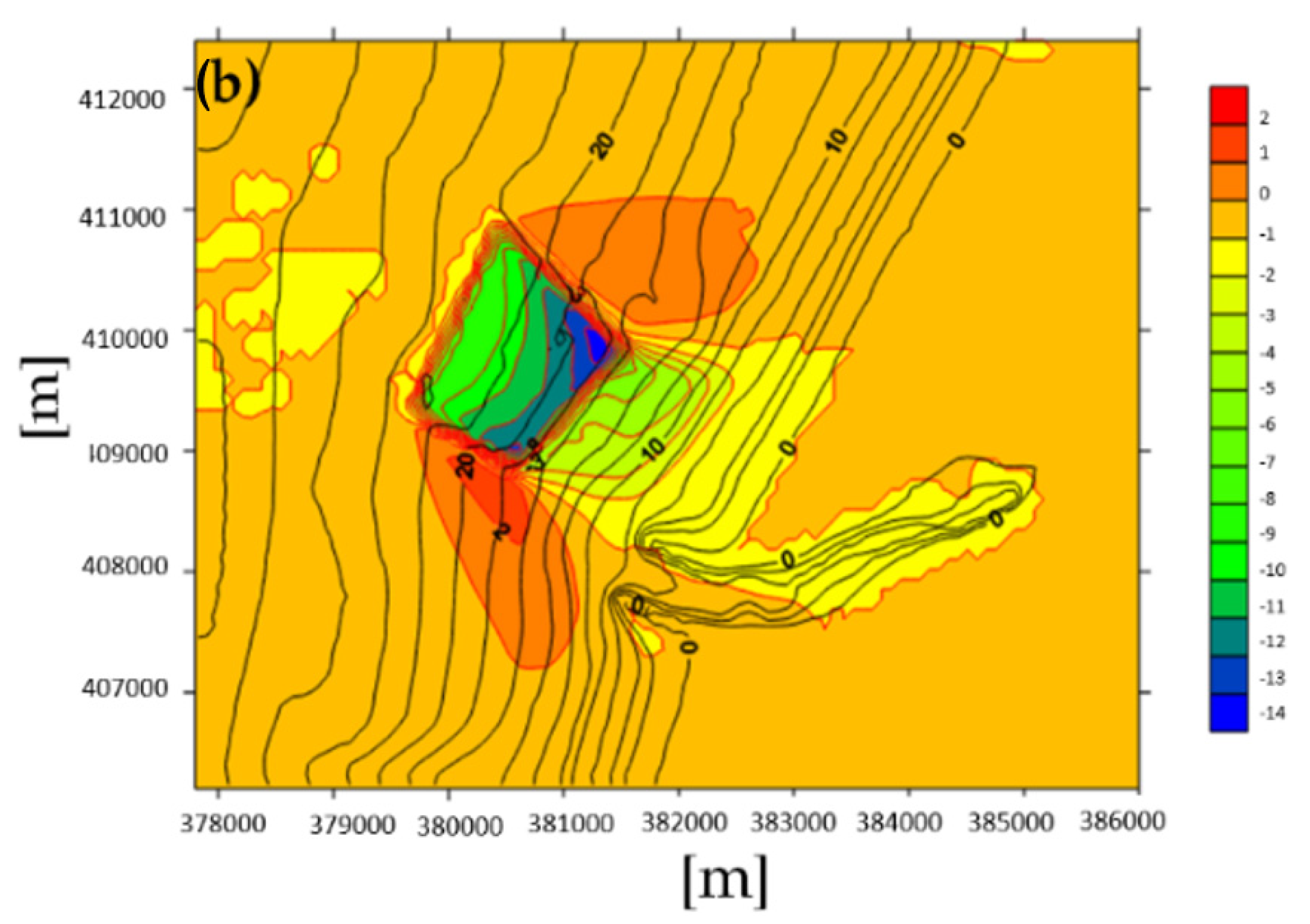
Figure 9 depicts examples of the relative bottom friction velocity (reflecting the bottom resistance) distribution in the target area. The relative friction velocity is defined as the difference between the simulated friction velocity with bathymetry with the dredged area and that without dredging (current bathymetry). The data shown in
Figure 9 refer to the dredging of 2 m depth.
Figure 9a shows the results of the relative friction velocity obtained with the most frequent case (
Hs0 = 1.5 m,
Tp = 8 s) (see
Table 2), whereas
Figure 9b shows that of the highest wave condition (
Hs0 = 4 m,
Tp = 12 s).
Figure 9 shows the clear effects of the dredging on the bottom friction velocity distribution.
The bottom friction velocity changes significantly as the wave gets closer to the excavation site. Locally, around the borders of the excavation, a minor increase of bottom resistance is noted, as demonstrated by the positive relative friction velocity values in
Figure 9. The bottom friction velocity significantly decreases inside the dredging area, reaching maximum magnitudes (of negative values). The effect of the dredging area on the friction velocities extends downstream of it, reaching zones C and D (
Figure 5).
The variation of the bottom friction velocity due to the excavation certainly affects the sediment transport potential [
29,
30,
31] and the wave energy flux linked to the redirected waves, particularly in zones C and D.
Figure 9 indicates a clear increase in the bottom friction velocity at the lateral sides (in the wave direction) of the excavation, which is more pronounced with the high tide condition (
Hs0 = 1.5 m,
Tp = 8 s). The possibility for erosion action increases as bottom shear stress increase. The friction velocity at the sea bottom slightly decreases in zones C and D, which are located downstream of the extraction site. This suggests that zones C and D are likely subject to sediment accumulation following dredging activities. An excessive sediment buildup can cause several environmental problems. It can reduce the seawater depth, preventing the passage of ships. It can also lead to contamination that poses a threat to aquatic plants (
Posidonia oceanica) and wildlife. Zones A and B of the coastal area in the southern part (from breakwaters) are almost not affected by the excavation site. Additionally, findings indicate that dredging up to 2 m depth has no significant effect along the channel profile.
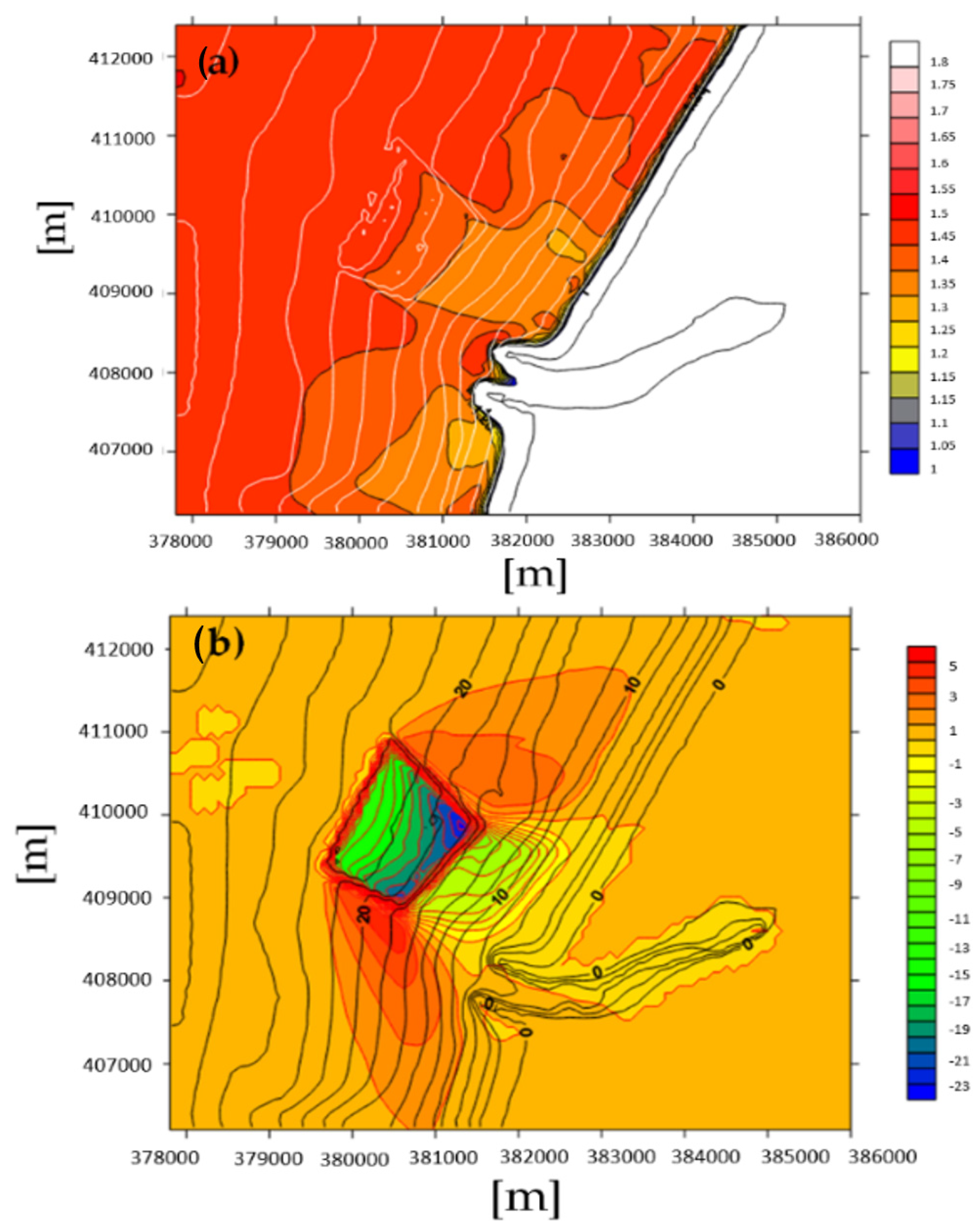
Figure 10 shows the wave height,
Hs (
Figure 10a) and its relative velocity (
Figure 10b) distribution maps, with additional excavations up to 4 m deep.
Figure 10a demonstrates how waves propagating across the excavation area tend to refract toward the areas of shallow water along the edges, increasing the wave heights (known as wave energy focusing). This causes the amplification of
Hs at the level of the river mouth, affecting zone B (
Figure 5). The increase in wave height at the mouth of the river continues to propagate upstream along the channel. As a kind of obstruction, the excavation causes the incident waves to converge and creates a wake region downstream of it where the wave height decreases.
Similar behavior to the wave height distribution is shown in
Figure 10b, where the relative friction velocity oscillates near the bottom. The friction velocities increase along the excavation’s lateral edges and decrease downstream of it. Compared to
Figure 9a, dredging up to 4 m deep has a greater impact on the estuary environment than dredging up to 2 m deep. With 4 m of dredging, the area is subject to increased erosion. Zones C and D, however, are subject to sediment accumulation.
Estuary ecosystems are significantly impacted by wave energy. The bathymetry in some coastal regions causes a concentration of wave energy, which raises wave height [
32].
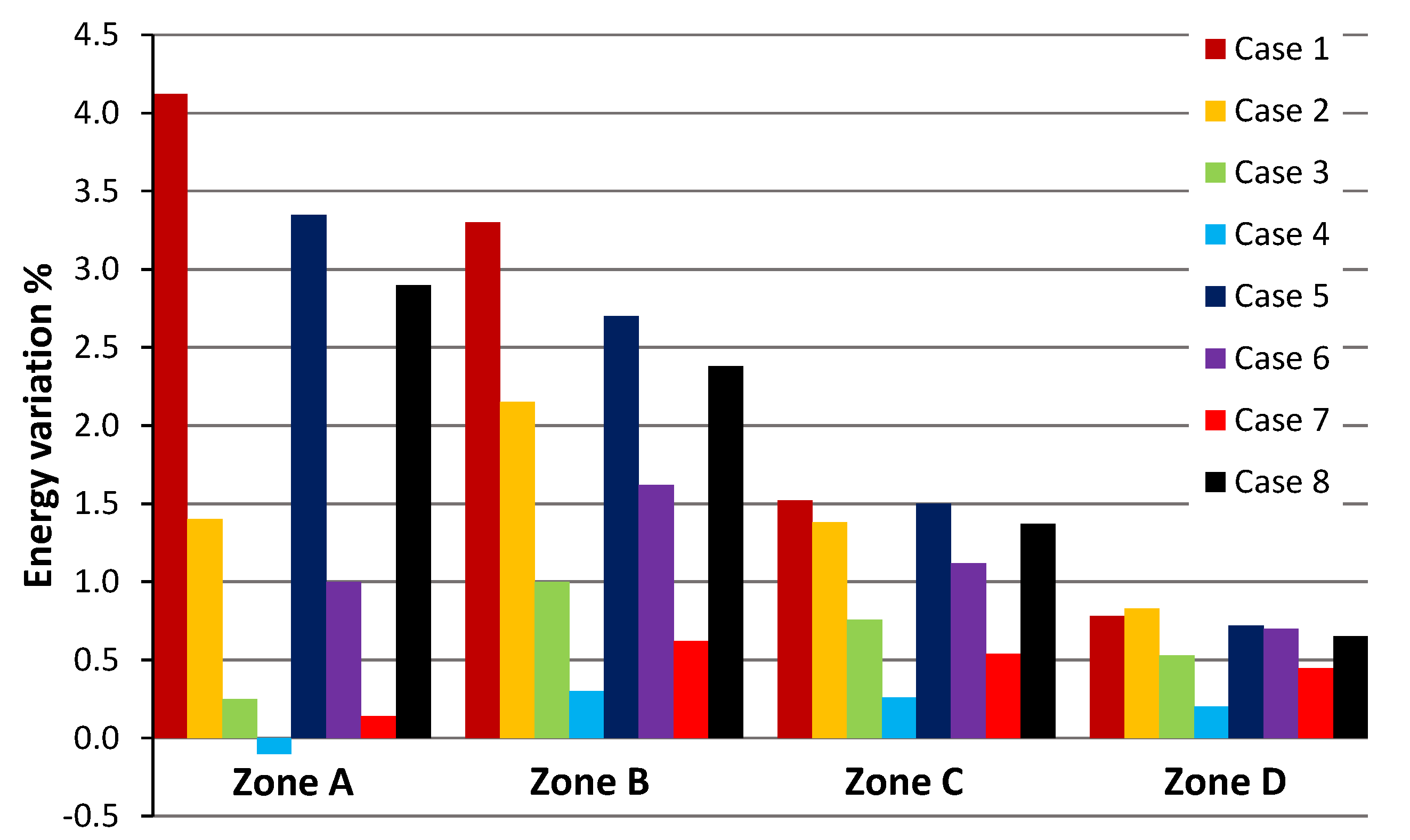
Figure 11 displays the fraction of wave relative energy percentage that corresponds to zones A, B, C, and D (
Figure 5). The energy was estimated at 10 m isobath, as shown in
Figure 8, and the relative percentage of energy was determined as the difference between the energy of the simulated wave with the excavation present and without it. The percentage is in relation to the simulated wave energy without excavation. The data shown in
Figure 11 relates to a 2 m-deep excavation.
Figure 11 demonstrates that the cases 1, 5, and 8 (see
Table 2), with the largest values of
Hs0 (4 m), undergo the greatest values of energy variations. The condition of the lowest sea level (case 1), in the different zones from A to D, consistently exhibits the highest variation in energy. The smallest variations in energy always appear in cases 4 and 7, with the lowest values of
Hs0 (1.5 m).
Figure 11 further demonstrates that zone A, which has a maximum variation value of order 4%, is the most affected zone by wave energy. The energy impact gradually decreases in the order from zone A to zone D, which is especially prominent in zones C and D. In general, it can be concluded that the dredging activities have a minimal but noticeable impact on the estuary environment of Oued Sebou that is not significant.
The simulated results of wave dispersions and their hydrodynamic structures are useful for estimating the sediment transport rates that will be an extension of this work.
6. Conclusions
The SWAN model was used to simulate a large number of wave motions at the Kenitra site in order to better understand the effects of dredging activities (due to sand extraction) in the Oued Sebou estuary. In various meteorological conditions, comparisons between the simulated results with and without dredging bathymetries were made. Eight configurations that accurately reflected the actual hydrodynamic circumstances that characterize the study area were tested.
The effects of the bathymetric changes, due to the sand extraction, on wave dispersion, bottom friction velocity field, and energy budget (before breaking) were extensively analyzed.
The sharp variation of the bathymetry due to the dredging that increases water depth causes an increase of the local significant wave height in and at the edges of the area susceptible to sand extraction. According to the simulation results, the waves propagating across the excavation area tend to refract toward the areas of shallow water along the edges, increasing the wave heights (known as wave energy focusing). This causes the amplification of Hs at the river mouth level and along the southern breakwater structure, which is more pronounced with deeper dredging. The excavation plays the role of a kind of obstacle, causing the incident waves to converge and creates a sort of wake region downstream of it where the wave height decreases.
The results show that zones C (at the northern breakwater) and D (northern coastal area) are subject to possible accumulation of sediments, whereas zones A (at the southern breakwater) and B (river mouth) are subject to an increased potential for erosive action and a risk of scouring processes at the southern breakwater.
Dredging activities in the Oued Sebou estuary mainly affect the river mouth (zone B) and the southern breakwater area (zone A), which is very noticeable with dredging up to 4 m deep.
In general, it can be concluded that the dredging activities show a certain level of impact on the estuary environment of Oued Sebou that is not very significant.
Despite the crucial role dredging plays in the nation’s economy and maritime engineering management (i.e., it helps make the water navigable, removes contaminants from seabeds and recreates damaged areas, maintains many marine infrastructures, and many other advantages), dredging could have serious and long-lasting negative impacts on the environment, leading to contamination that poses a threat to aquatic plants (Posidonia oceanica) and wildlife
The simulation results, which will be validated by some measured wave characteristic data, are useful for examining sediment variations along the estuary coastal area, a subject we are currently working on.



 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}