
Assessment of the Usability of SAR and Optical Satellite Data for Monitoring Spatio-Temporal Changes in Surface Water: Bodrog River Case Study





Abstract
:1. Introduction
2. Study Area
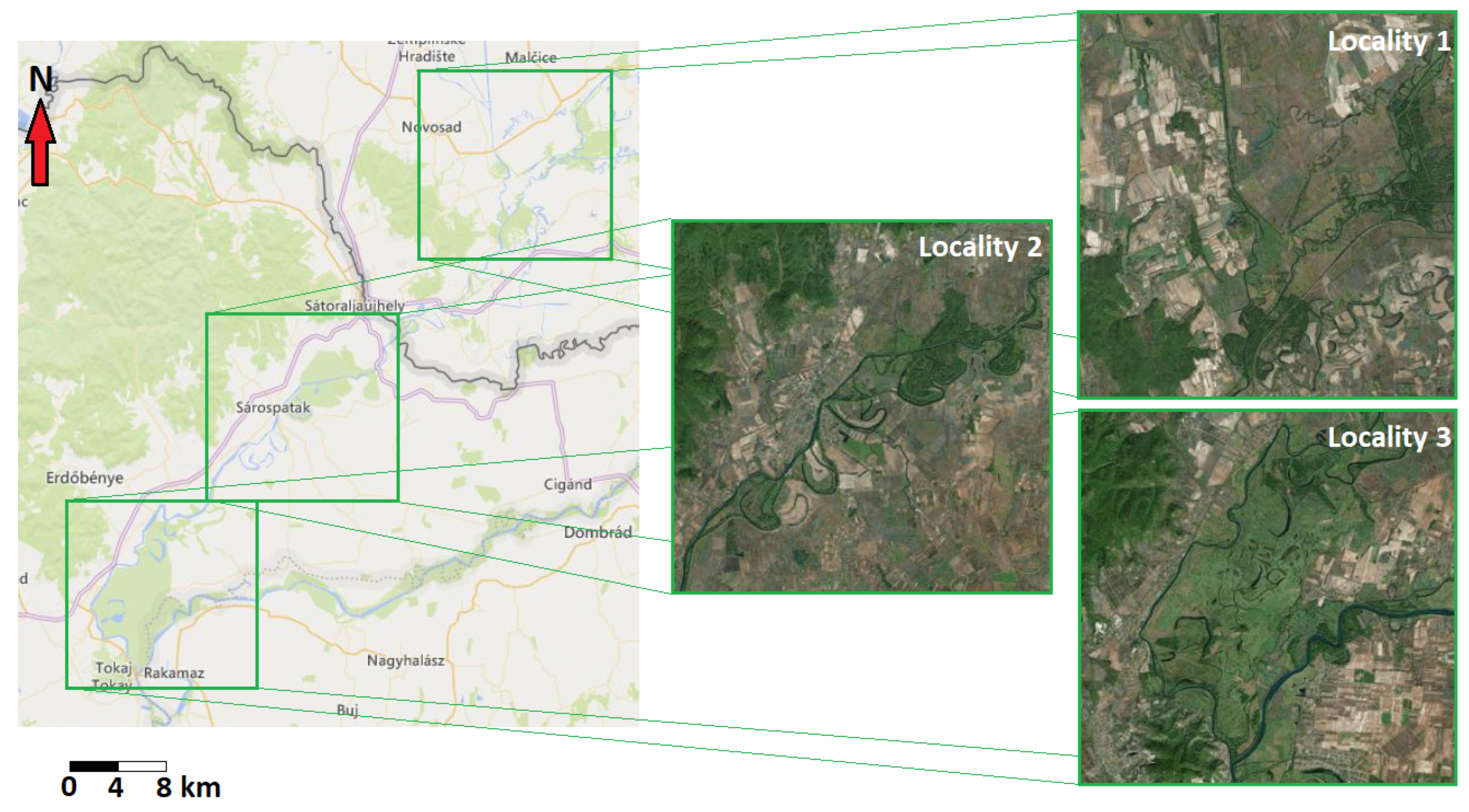
2.1. Geographical Location
2.2. Characteristics of the Study Area
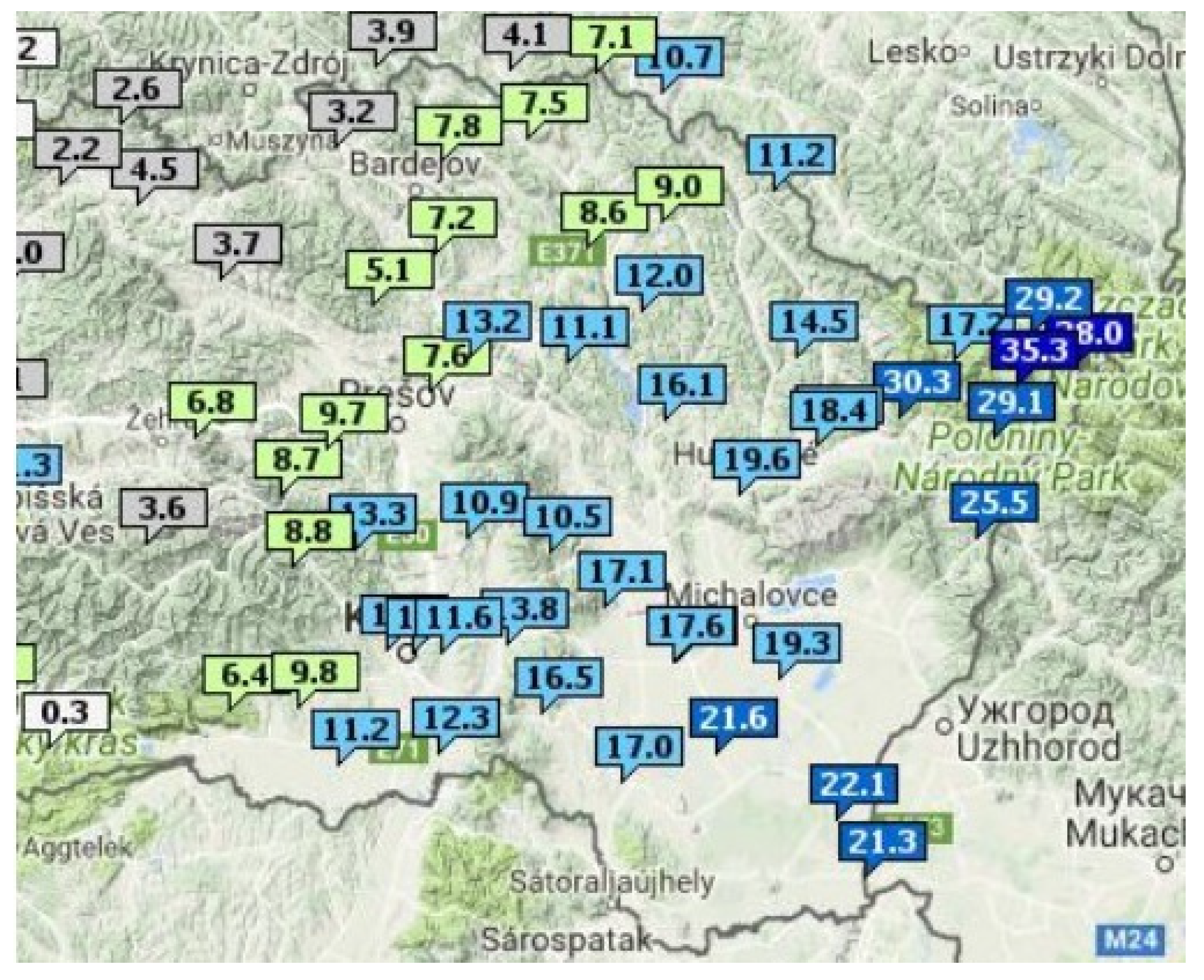
2.3. Climatic and Meteorological Conditions
3. Materials and Methods
3.1. Materials
3.1.1. Sentinel-1 SAR Satellite Data
3.1.2. Sentinel-2 Multispectral Satellite Data
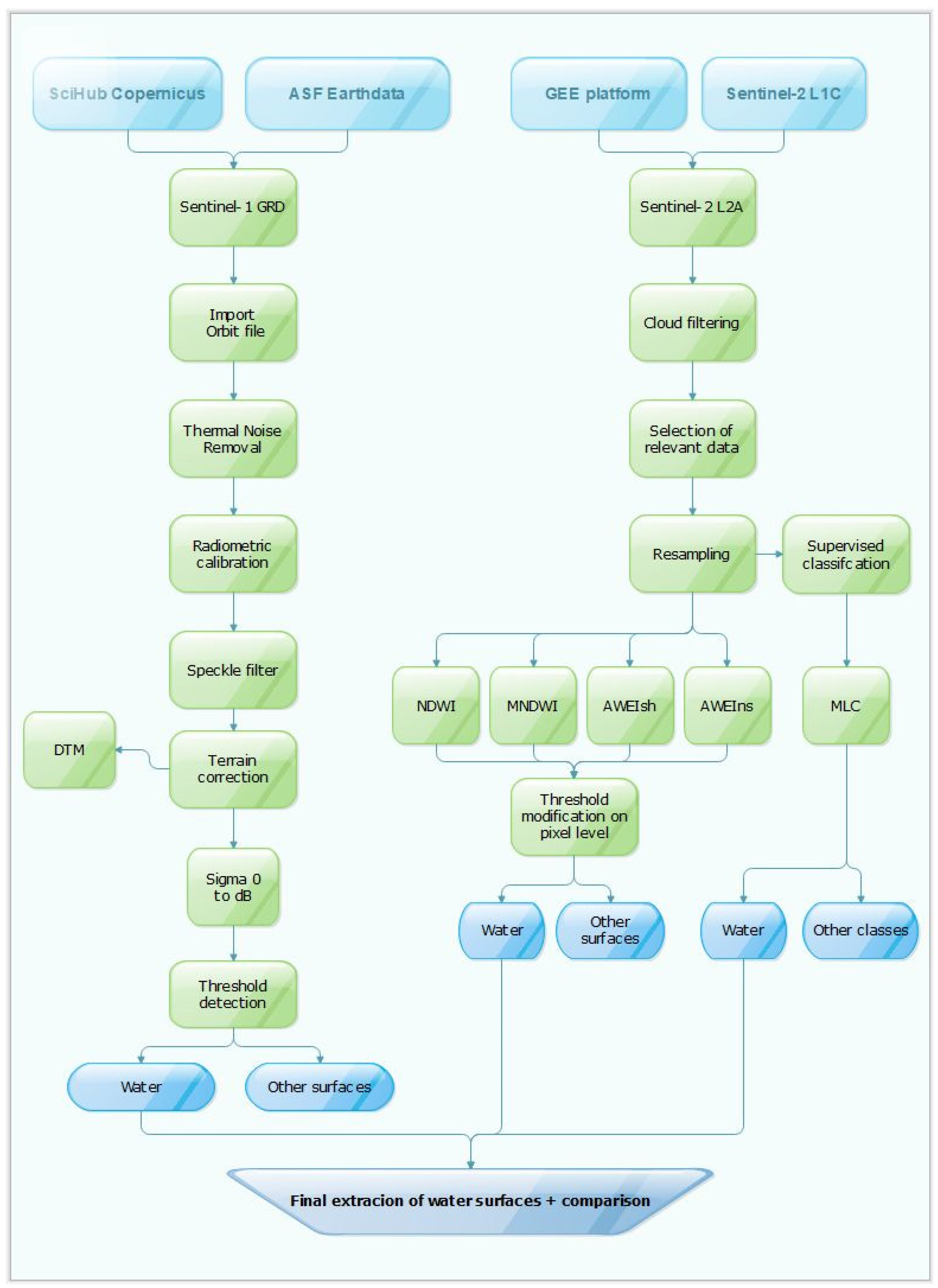
3.2. Methodology
3.2.1. Water Body Extraction from SAR Data
3.2.2. Water Body Extraction from Optical Data
3.2.3. Accuracy Assessment
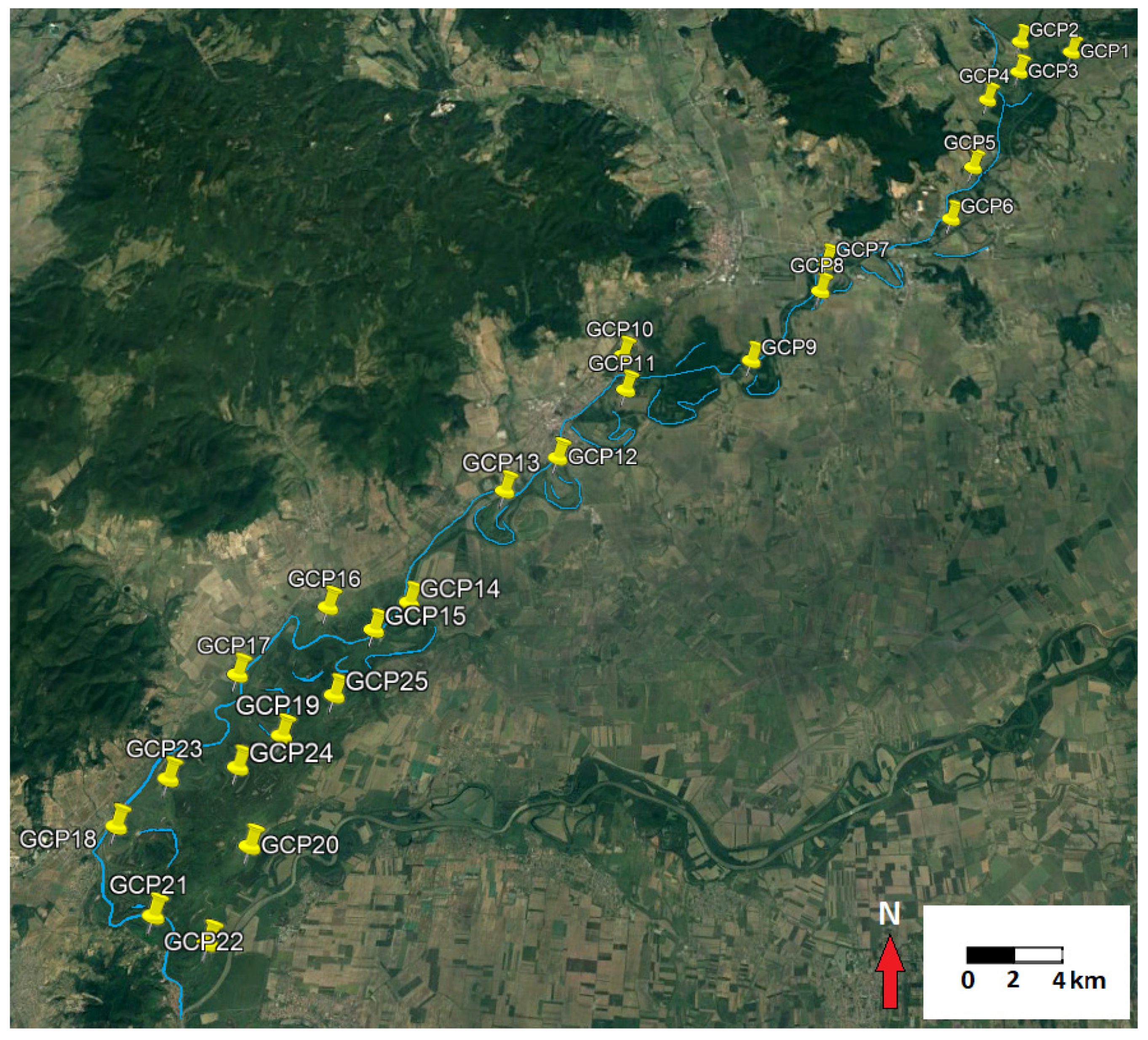
3.2.4. Ground Control Points selection
4. Results
4.1. SAR Calibration Threshold Results
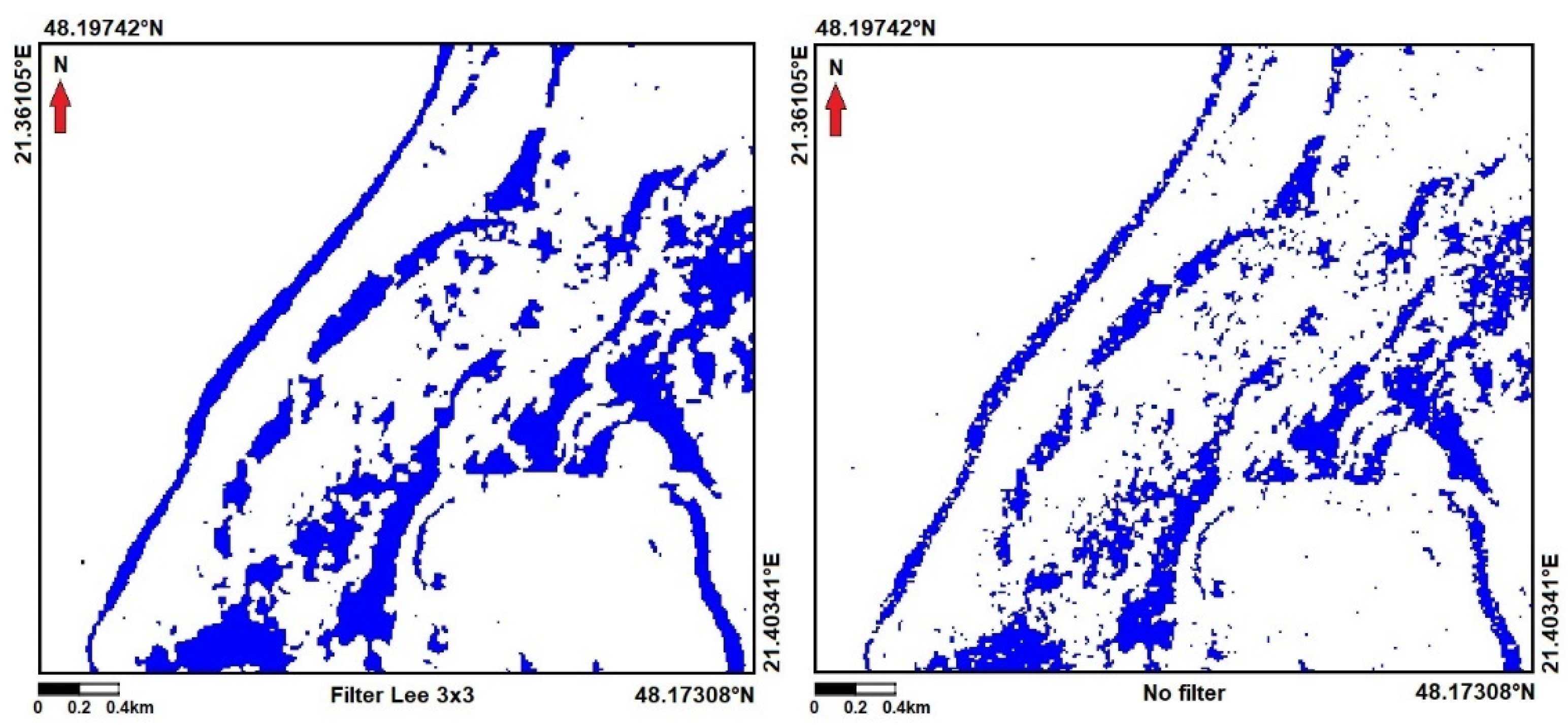
4.2. Radar Noise Elimination Results
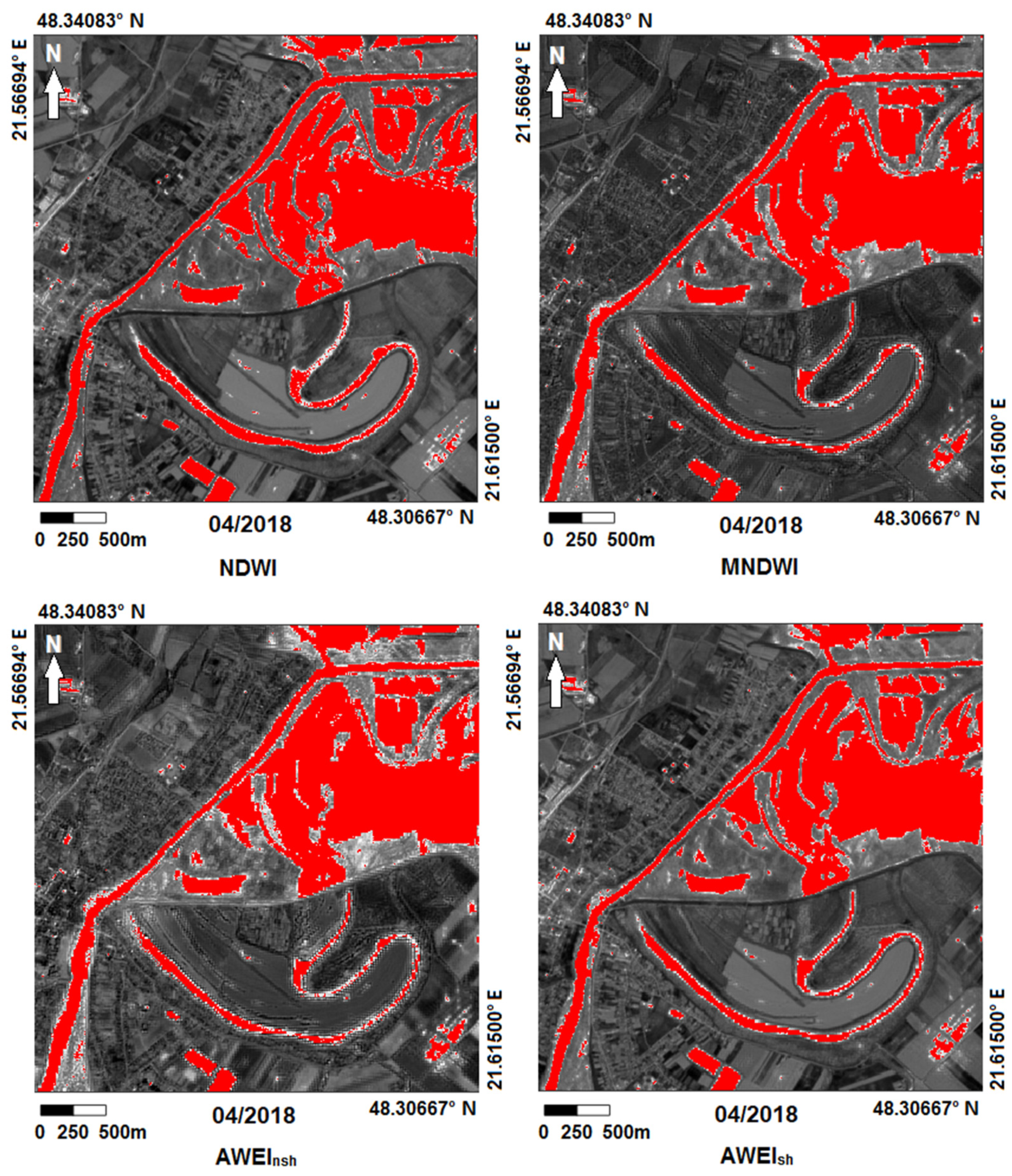
4.3. Results of Comparison of Spectral Indices of Water
- NDWI—The water surfaces extraction was continuous. The most significant values of errors were in built-up areas and their shadows with the uncertain distribution. It means that some objects of the urban areas show positive values in the results. Additionally, the increasing presence of additional noise is difficult to eliminate.
- MNDWI—The process of extraction of water bodies was sufficient, with a few exceptions. The disadvantage of using the MNDWI index is its implementation in urban areas with high albedo. The main error factors include the shadows of buildings in built-up areas for the SWIR bands. On the other hand, the separation of urban areas from water surfaces was clear. The slight deterioration in spatial resolution is also visible.
- AWEInsh—The extraction with this index was relatively successful. The shadow distribution of the built-up areas was almost identical to that of the MNDWI index. However, in terms of shortcomings, there were significant problems with the shadows of the clouds in February and March. On the images from these months, the cloud filtration process of Sentinel-2 had some cloud coverage limitations.
- AWEIsh—Areas with a high albedo, like MNDWI, can be considered the significant source of error. It is because soil, vegetation, and built-up classes have smaller negative values, which reflect more SWIR light than green light. On the other hand, the extracted water areas look continuous, without significant changes compared to the previous indices. The graphical representation of the results is as follows (Figure 11).
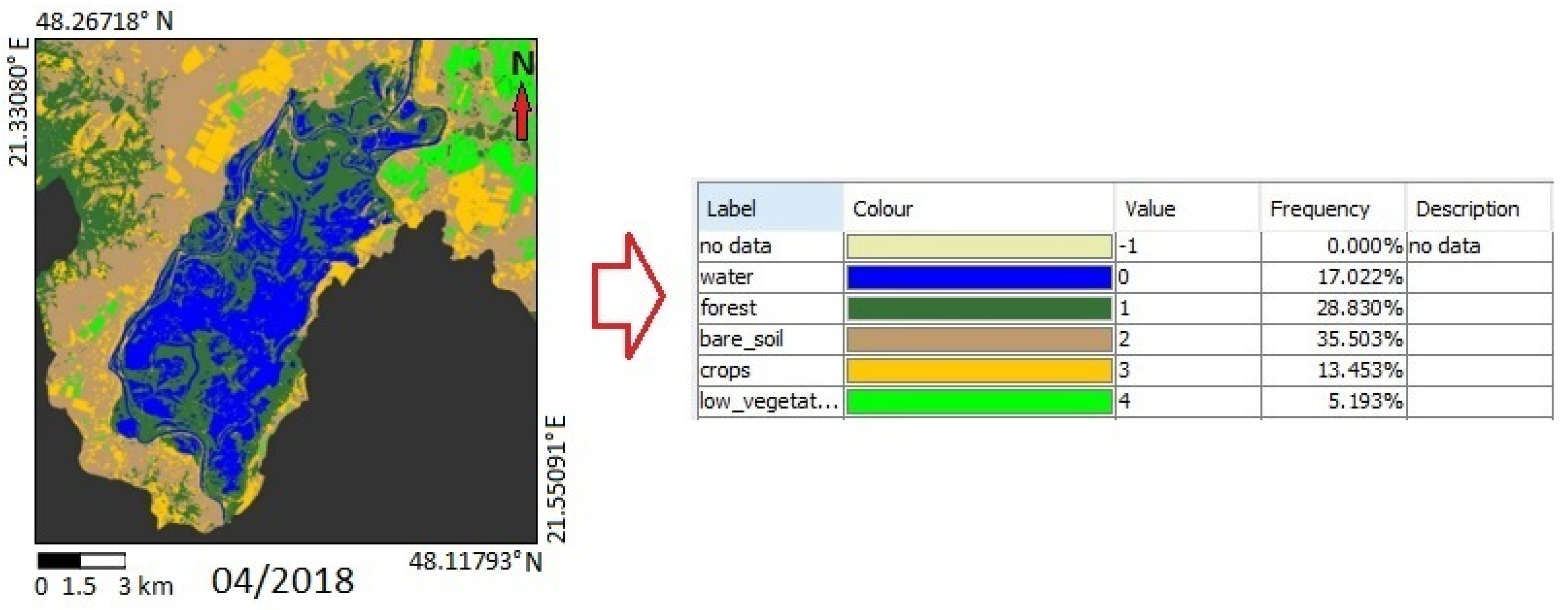
4.4. Results of Supervised Classification
5. Discussion
Comparison of SAR and Multispectral Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Feng, M.; Sexton, J.O.; Channan, S.; Townshend, J.R. A global, high-resolution (30-m) inland water body dataset for 2000: First results of a topographic-spectral classification algorithm. Int. J. Digit. Earth 2016, 9, 113–133. [Google Scholar] [CrossRef] [Green Version]
- Sekertekin, A. A Survey on Global Thresholding Methods for Mapping Open Water Body Using Sentinel-2 Satellite Imagery and Normalized Difference Water Index. Arch. Comput. Method Eng. 2019, 13, 1335–1347. [Google Scholar] [CrossRef]
- Jiang, W.; He, G.; Pang, Z.; Guo, H.; Long, T.; Ni, Y. Surface water map of China for 2015 (SWMC-2015) derived from Landsat 8 satellite imagery. Remote Sens. Lett. 2020, 11, 265–273. [Google Scholar] [CrossRef]
- Yue, H.; Li, Y.; Qian, J.X.; Liu, Y. A new accuracy evaluation method for water body extraction. Int. J. Remote Sens. 2020, 41, 7311–7342. [Google Scholar] [CrossRef]
- Jiang, W.; He, G.; Long, T.; Ni, Y.; Liu, H.; Peng, Y.; Lv, K.; Wang, G. Multilayer Perceptron Neural Network for Surface Water Extraction in Landsat 8 OLI Satellite Images. Remote Sens. 2018, 10, 755. [Google Scholar] [CrossRef] [Green Version]
- Holgerson, M.A.; Raymond, P.A. Large contribution to inland water CO2 and CH4 emissions from very small ponds. Nat. Geosci. 2016, 9, 222–226. [Google Scholar] [CrossRef]
- Pekel, J.F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef]
- Zeleňáková, M.; Fijko, R.; Labant, S.; Weiss, E.; Markovič, G.; Weiss, R. Flood risk modelling of the Slatvinec stream in Kružlov village, Slovakia. J. Clean. Prod. 2019, 212, 109–118. [Google Scholar] [CrossRef]
- Gardner, R.; Barchiesi, S.; Beltrame, C.; Finlayson, C.; Galewski, T.; Harrison, I.; Paganini, M.; Perennou, C.; Pritchard, D.; Rosenqvist, A.; et al. State of the World’s Wetlands and Their Services to People: A Compilation of Recent Analyses. SSRN Electron. J. 2015, 21, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Gergeľová, M.; Kuzevičová, Ž.; Kuzevič, Š.; Sabolová, J. Hydrodynamic modeling and GIS tools applied in urban areas. Acta Montan. Slovaca 2013, 18, 226–233. [Google Scholar]
- Papa, F.; Prigent, C.; Rossow, W.B. Monitoring Flood and Discharge Variations in the Large Siberian Rivers from a Multi-Satellite Technique. Surv. Geophys. 2008, 29, 297–317. [Google Scholar] [CrossRef]
- Michalowska, K.; Glowienka, E.; Hejmanowska, B. Temporal Satellite Images in The Process of Automatic Efficient Detection of Changes of the Baltic Sea Coastal Zone. IOP Conf. Ser. Earth Environ. Sci. 2016, 44, 042019. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.R.; Thakurb, P.K. Detecting, mapping and analysing of flood water propagation using synthetic aperture radar (SAR) satellite data and GIS: A case study from the Kendrapara District of Orissa State of India. Egypt. J. Remote Sens. Space Sci. 2018, 21, 37–41. [Google Scholar] [CrossRef]
- Tran, H.; Nguyen, P.; Ombadi, M.; Hsu, K.; Sorooshian, S.; Andreadis, K. Improving Hydrologic Modeling Using Cloud-Free MODIS Flood Maps. J. Hydrometeorol. 2019, 20, 2203–2214. [Google Scholar] [CrossRef] [Green Version]
- Szombara, S.; Lewińska, P.; Żądło, A.; Róg, M.; Maciuk, K. Analyses of the Prądnik riverbed Shape Based on Archival and Contemporary Data Sets—Old Maps, LiDAR, DTMs, Orthophotomaps and Cross-Sectional Profile Measurements. Remote Sens. 2020, 12, 2208. [Google Scholar] [CrossRef]
- Tran, H.; Nguyen, P.; Ombadi, M.; Hsu, K.; Sorooshian, S.; Qing, X. A cloud-free MODIS snow cover dataset for the contiguous United States from 2000 to 2017. Sci. Data 2019, 6, 180300. [Google Scholar] [CrossRef]
- Urban, R.; Štroner, M.; Blistan, P.; Kovanič, Ľ.; Patera, M.; Jacko, S.; Ďuriška, I.; Kelemen, M.; Szabo, S. The Suitability of UAS for Mass Movement Monitoring Caused by Torrential Rainfall—A Study on the Talus Cones in the Alpine Terrain in High Tatras, Slovakia. ISPRS Int. J. Geo-Inf. 2019, 8, 317. [Google Scholar] [CrossRef] [Green Version]
- Blistan, P.; Kovanič, L.; Patera, M.; Hurčík, T. Evaluation quality parameters of DEM generated with low-cost UAV photogrammetry and Structure-from-Motion (SfM) approach for topographic surveying of small areas. Acta Montan. Slovaca 2019, 24, 198–212. [Google Scholar]
- Urban, R.; Štroner, M.; Kuric, I. The use of onboard UAV GNSS navigation data for area and volume calculation. Acta Montan. Slovaca 2020, 25, 361–374. [Google Scholar]
- Bazzi, H.; Baghdadi, N.; Ienco, D.; El Hajj, M.; Zribi, M.; Belhouchette, H.; Escorihuela, M.J.; Demarez, V. Mapping Irrigated Areas Using Sentinel-1 Time Series in Catalonia, Spain. Remote Sens. 2019, 11, 1836. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging, 1st ed.; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2017; p. 398. [Google Scholar] [CrossRef]
- Dabiri, Z.; Hölbling, D.; Abad, L.; Helgason, J.K.; Sæmundsson, Þ.; Tiede, D. Assessment of Landslide-Induced Geomorphological Changes in Hítardalur Valley, Iceland, Using Sentinel-1 and Sentinel-2 Data. Appl. Sci. 2020, 10, 5848. [Google Scholar] [CrossRef]
- Paluba, D.; Laštovička, J.; Mouratidis, A.; Štych, P. Land Cover-Specific Local Incidence Angle Correction: A Method for Time-Series Analysis of Forest Ecosystems. Remote Sens. 2021, 13, 1743. [Google Scholar] [CrossRef]
- Marzi, D.; Gamba, P. Inland Water Body Mapping Using Multitemporal Sentinel-1 SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 11789–11799. [Google Scholar] [CrossRef]
- Chapman, B.; McDonald, K.; Shimada, M.; Rosenqvist, A.; Schroeder, R.; Hess, L. Mapping Regional Inundation with Spaceborne L-Band SAR. Remote Sens. 2015, 7, 5440–5470. [Google Scholar] [CrossRef] [Green Version]
- Voormansik, K.; Praks, J.; Antropov, O.; Jagomägi, J.; Zalite, K. Flood Mapping with TerraSAR-X in Forested Regions in Estonia. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 562–577. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Pierdicca, N.; Chini, M.; Guerriero, L. Monitoring Flood Evolution in Vegetated Areas Using COSMO-SkyMed Data: The Tuscany 2009 Case Study. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1807–1816. [Google Scholar] [CrossRef]
- Schlaffer, S.; Chini, M.; Dettmering, D.; Wagner, W. Mapping Wetlands in Zambia Using Seasonal Backscatter Signatures Derived from ENVISAT ASAR Time Series. Remote Sens. 2016, 8, 402. [Google Scholar] [CrossRef] [Green Version]
- Brisco, B.; Schmitt, A.; Murnaghan, K.; Kaya, S.; Roth, A. SAR Polarimetric Change Detection for Flooded Vegetation. Int. J. Digit. Earth 2013, 6, 103–114. [Google Scholar] [CrossRef]
- Evans, T.L.; Costa, M.; Tomas, W.M.; Camilo, A.R. Large-scale habitat mapping of the Brazilian Pantanal wetland: A synthetic aperture radar approach. Remote Sens. Environ. 2014, 155, 89–108. [Google Scholar] [CrossRef]
- Hess, L.L.; Melack, J.M.; Affonso, A.G.; Barbosa, C.; Gastil-Buhl, M.; Novo, E.M.L.M. Wetlands of the Lowland Amazon Basin: Extent, Vegetative Cover, and Dual-season Inundated Area as Mapped with JERS-1 Synthetic Aperture Radar. Wetlands 2015, 35, 745–756. [Google Scholar] [CrossRef]
- Kaplan, G.; Avdan, U. Object-based water body extraction model using Sentinel-2 satellite imagery. Eur. J. Remote Sens. 2017, 50, 137–143. [Google Scholar] [CrossRef] [Green Version]
- Work, E.A.; Gilmer, D.S. Utilisation of satellite data for inventorying prairie ponds and lakes. Photogramm. Eng. Remote Sens. 1976, 42, 685–694. [Google Scholar]
- Sivanpillai, R.; Miller, S.N. Improvements in mapping water bodies using ASTER data. Ecol. Inform. 2010, 5, 73–78. [Google Scholar] [CrossRef]
- Huang, C.; Chen, Y.; Wu, J.P. Mapping spatio-temporal flood inundation dynamics at large river basin scale using time-series flow data and MODIS imagery. Int. J. Appl. Earth Obs. Geoinf. 2014, 26, 350–362. [Google Scholar] [CrossRef]
- Li, W.; Du, Z.; Ling, F.; Zhou, D.; Wang, H.; Gui, Y.; Sun, B.; Zhang, X. A Comparison of Land Surface Water Mapping Using the Normalised Difference Water Index from TM, ETM+ and ALI. Remote Sens. 2013, 5, 5530–5549. [Google Scholar] [CrossRef] [Green Version]
- Xie, H.; Luo, X.; Xu, X.; Tong, X.; Jin, Y.; Pan, H.; Zhou, B. New hyperspectral difference water index for the extraction of urban water bodies by the use of airborne hyperspectral images. J. Appl. Remote Sens. 2014, 8, 085098. [Google Scholar] [CrossRef] [Green Version]
- Jiang, H.; Feng, M.; Zhu, Y.; Lu, N.; Huang, J.; Xiao, T. An Automated Method for Extracting Rivers and Lakes from Landsat Imagery. Remote Sens. 2014, 6, 5067–5089. [Google Scholar] [CrossRef] [Green Version]
- Ryu, J.; Won, J.; Min, K. Waterline extraction from Landsat TM data in a tidal flatA case study in Gomso Bay, Korea. Remote Sens. Environ. 2002, 83, 442–456. [Google Scholar] [CrossRef]
- Sun, F.; Sun, W.; Chen, J.; Gong, P. Comparison and improvement of methods for identifying waterbodies in remotely sensed imagery. Int. J. Remote Sens. 2012, 33, 6854–6875. [Google Scholar] [CrossRef]
- Yang, X.; Qin, Q.; Grussenmeyer, P.; Koehl, M. Urban surface water body detection with suppressed built-up noise based on water indices from Sentinel-2 MSI imagery. Remote Sens. Environ. 2018, 219, 259–270. [Google Scholar] [CrossRef]
- Yao, F.; Wang, C.; Dong, D.; Luo, J.; Shen, Z.; Yang, K. High-Resolution Mapping of Urban Surface Water Using ZY-3 Multi-Spectral Imagery. Remote Sens. 2015, 7, 12336–12355. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; He, X.; Yang, G.; Liu, H.; Long, A.; Chen, F.; Liu, B.; Gu, X. Land use/cover and landscape pattern changes in Manas River Basin based on remote sensing. Int. J. Agric. Biol. Eng. 2020, 13, 141–152. [Google Scholar] [CrossRef]
- Liu, H.; He, G.; Peng, Y.; Wang, G.; Yin, R. Dynamic monitoring of surface water in the Tibetan Plateau from 1980s to 2019 based on satellite remote sensing images. J. Mt. Sci. 2021, 18, 2833–2841. [Google Scholar] [CrossRef]
- Sahoo, P.K.; Soltani, S.; Wong, A.K.C. A survey of thresholding techniques. Comp. Vis. Graph. Image Process. 1988, 41, 233–260. [Google Scholar] [CrossRef]
- Rosenfeld, A.; De La Torre, P. Histogram concavity analysis as an aid in threshold selection. IEEE Trans. Syst. Man Cybern. 1983, SMC-13, 231–235. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Kittler, J.; Illingworth, J. On threshold selection using clustering criteria. IEEE Trans. Syst. Man Cybern. 1985, SMC-15, 652–655. [Google Scholar] [CrossRef]
- Tsai, W.H. Moment-preserving thresholding: A new approach. Comp. Vis. Graph. Image Proces. 1985, 29, 377–393. [Google Scholar] [CrossRef]
- Jiang, W.; Ni, Y.; Pang, Z.; Li, X.; Ju, H.; He, G.; Lv, J.; Yang, K.; Fu, J.; Qin, X. An Effective Water Body Extraction Method with New Water Index for Sentinel-2 Imagery. Water 2021, 13, 1647. [Google Scholar] [CrossRef]
- Chen, F.; Chen, X.; Van de Voorde, T.; Roberts, D.; Jiang, H.; Xu, W. Open water detection in urban environments using high spatial resolution remote sensing imagery. Remote Sens. Environ. 2020, 242, 111706. [Google Scholar] [CrossRef]
- Bijeesh, T.; Narasimhamurthy, K. Surface water detection and delineation using remote sensing images: A review of methods and algorithms. Sustain. Water Resour. Manag. 2020, 6, 68. [Google Scholar] [CrossRef]
- Mecser, N.; Demeter, G.; Szabó, G. Morphometric changes of the Bodrog River from the Late 18th century to 2006. AGD Landsc. Environ. 2009, 3, 28–40. [Google Scholar]
- Zeleňáková, M.; Purcz, P.; Poórová, Z.; Alkhalaf, I.; Hlavatá, H.; Portela, M. Monthly Trends of Precipitation in Gauging Stations in Slovakia. Procedia Eng. 2016, 162, 106–111. [Google Scholar] [CrossRef]
- Ministry of Environment of the Slovak Republic. Povodňová Situácia v Zime 2017/2018 na Východnom Slovensku; Slovak Hydrometeorological Institute: Košice, Slovakia, 2018; p. 32. [Google Scholar]
- Ministry of Environment of the Slovak Republic. Povodňová Situácia na Východnom Slovensku v Apríli 2018; Slovak Hydrometeorological Institute: Košice, Slovakia, 2018; p. 29. [Google Scholar]
- Filipponi, F. Sentinel-1 GRD Preprocessing Workflow. Proceedings 2019, 18, 11. [Google Scholar] [CrossRef] [Green Version]
- User Guides—Sentinel-1 SAR—Acquisition Modes—Sentinel Online. Available online: https://sentinel.esa.int/web/sentinel/user-guides/sentinel-1-sar/acquisition-modes (accessed on 30 August 2021).
- Du, Y.; Zhang, Y.; Ling, F.; Wang, Q.; Li, W.; Li, X. Water Bodies’ Mapping from Sentinel-2 Imagery with Modified Normalized Difference Water Index at 10-m Spatial Resolution Produced by Sharpening the SWIR Band. Remote Sens. 2016, 8, 354. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Zhao, S.; Qin, X.; Zhao, N.; Liang, L. Mapping of Urban Surface Water Bodies from Sentinel-2 MSI Imagery at 10 m Resolution via NDWI-Based Image Sharpening. Remote Sens. 2017, 9, 596. [Google Scholar] [CrossRef] [Green Version]
- Zurqani, H.A.; Post, C.J.; Mikhailova, E.A.; Schlautman, M.A.; Sharp, J.L. Geospatial analysis of land use change in the Savannah River Basin using Google Earth Engine. Int. J. Appl. Earth Obs. Geoinf. 2018, 69, 175–185. [Google Scholar] [CrossRef]
- Bayanudin, A.A.; Jatmiko, R.H. Orthorectification of Sentinel-1 SAR (Synthetic Aperture Radar) Data in Some Parts of South-eastern Sulawesi Using Sentinel-1 Toolbox. IOP Conf. Ser. Earth Environ. Sci. 2016, 47, 012007. [Google Scholar] [CrossRef]
- McFeeters, S.K. The Use of the Normalized Difference Water Index (NDWI) in the Delineation of Open Water Features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Enivon. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Nguyen, U.N.T.; Pham, L.T.H.; Dang, T.D. An automatic water detection approach using Landsat 8 OLI and Google Earth Engine cloud computing to map lakes and reservoirs in New Zealand. Environ. Monit. Assess. 2019, 191, 235. [Google Scholar] [CrossRef]
- Stehman, S.V.; Foody, G.M. Accuracy assessment. In The SAGE Handbook of Remote Sensing; Sage: London, UK, 2009; pp. 297–309. [Google Scholar]
- Story, M.; Congalton, R.G. Accuracy assessment: A user’s perspective. Photogramm. Eng. Remote Sens. 1986, 52, 397–399. [Google Scholar]
- Alberg, A.; Park, J.; Hager, B.; Brock, M.; Diener-West, M. The use of “overall accuracy” to evaluate the validity of screening or diagnostic tests. J. Gen. Intern. Med. 2004, 19, 460–465. [Google Scholar] [CrossRef] [Green Version]
- Stehman, S. Estimating the kappa coefficient and its variance under stratified random sampling. Photogramm. Eng. Remote Sens. 1996, 62, 401–407. [Google Scholar]
- Klemas, V. Remote sensing of floods and flood-prone areas: An overview. J. Coast. Res. 2015, 31, 1005–1013. [Google Scholar] [CrossRef]
- Rao, P.; Rao, K.; Kubo, S. Proceedings of International Conference on Remote Sensing for Disaster Management; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Clement, M.; Kilsby, C.; Moore, P. Multi-temporal synthetic aperture radar flood mapping using change detection. J. Flood Risk Manag. 2017, 11, 152–168. [Google Scholar] [CrossRef]
- Manjusree, P.; Prasanna Kumar, L.; Bhatt, C.; Rao, G.; Bhanumurthy, V. Optimization of threshold ranges for rapid flood inundation mapping by evaluating backscatter profiles of high incidence angle SAR images. Int. J. Disaster Risk Sci. 2012, 3, 113–122. [Google Scholar] [CrossRef] [Green Version]
- Cao, H.; Zhang, H.; Wang, C.; Zhang, B. Operational Flood Detection Using Sentinel-1 SAR Data over Large Areas. Water 2019, 11, 786. [Google Scholar] [CrossRef] [Green Version]
- Twele, A.; Cao, W.; Plank, S.; Martinis, S. Sentinel-1-based flood mapping: A fully automated processing chain. Int. J. Remote Sens. 2016, 37, 2990–3004. [Google Scholar] [CrossRef]
- Dutta, U.; Singh, Y.K.; Prabhu, T.S.M.; Yendargaye, G.; Kale, R.G.; Kumar, B.; Khare, M.; Yadav, R.; Khattar, R.; Samal, S.K. Flood Forecasting in Large River Basins Using FOSS Tool and HPC. Water 2021, 13, 3484. [Google Scholar] [CrossRef]
- Rubel, O.; Lukin, V.; Rubel, A.; Egiazarian, K. Selection of Lee Filter Window Size Based on Despeckling Efficiency Prediction for Sentinel SAR Images. Remote Sens. 2021, 13, 1887. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, F.; Liang, D.; Tian, B.; Yang, A. Use of Sentinel-1 GRD SAR Images to Delineate Flood Extent in Pakistan. Sustainability 2020, 12, 5784. [Google Scholar] [CrossRef]
- Tsyganskaya, V.; Martinis, S.; Marzahn, P. Flood Monitoring in Vegetated Areas Using Multitemporal Sentinel-1 Data: Impact of Time Series Features. Water 2019, 11, 1938. [Google Scholar] [CrossRef] [Green Version]
- Touzi, R.; Deschamps, A.; Rother, G. Phase of Target Scattering for Wetland Characterization Using Polarimetric C-Band SAR. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3241–3261. [Google Scholar] [CrossRef]
- Tsyganskaya, V.; Martinis, S.; Marzahn, P.; Ludwig, R. Detection of Temporary Flooded Vegetation Using Sentinel-1 Time Series Data. Remote Sens. 2018, 10, 1286. [Google Scholar] [CrossRef] [Green Version]
- Notti, D.; Giordan, D.; Caló, F.; Pepe, A.; Zucca, F.; Galve, J.P. Potential and Limitations of Open Satellite Data for Flood Mapping. Remote Sens. 2018, 10, 1673. [Google Scholar] [CrossRef] [Green Version]
- Bolanos, S.; Stiff, D.; Brisco, B.; Pietroniro, A. Operational Surface Water Detection and Monitoring Using Radarsat 2. Remote Sens. 2016, 8, 285. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flow Station Name | River Name | Date | Hour | Hmax [cm] | Qmax [m3/s] | N-Year | Flood STAGE 1 |
|---|---|---|---|---|---|---|---|
| Streda nad Bodrogom | 19 December 2017 | 07:15 | 868 | 650 | 2 | 3 (850 cm) | |
| Bodrog | 7 February 2018 | 07:15 | 650 | 296 | <1 | 1 (650 cm) | |
| 7 April 2018 | 15:00 | 759 | 438 | <1 | 2 (700 cm) | ||
| Veľké Kapušany | Latorica | 18 December 2017 | 16:45 | 784 | 340 | 5–10 | 3 (750 cm) |
| 7 February 2018 | 09:00 | 633 | 99.9 | <1 | 2 (600 cm) | ||
| 20 March 2018 | 09:30 | 598 | 85.8 | <1 | 1 (550 cm) | ||
| 6 April 2018 | 02:45 | 656 | 115 | <1 | 2 (600 cm) |
| Title 1 | Satellite Type | Orbit Type | Absolute Orbit |
|---|---|---|---|
| 27 November 2017 | Sentinel-1B | Descending | 8404 |
| 19 December 2017 | Sentinel-1A | Ascending | 19,774 |
| 12 January 2018 | Sentinel-1A | Ascending | 20,124 |
| 11 February 2018 | Sentinel-1B | Ascending | 9578 |
| 19 March 2018 | Sentinel-1B | Ascending | 10,103 |
| 12 April 2018 | Sentinel-1B | Ascending | 10,453 |
| Band Name | Description | Resolution (Spatial) [m] | Band Width [m] | Central Wavelength [μm] |
|---|---|---|---|---|
| Band 1 | Coastal Aerosol | 60 | 20 | 0.443 |
| Band 2 | Blue | 10 | 65 | 0.490 |
| Band 3 | Green | 10 | 35 | 0.560 |
| Band 4 | Red | 10 | 30 | 0.665 |
| Band 5 | Vegetation Red Edge | 20 | 15 | 0.705 |
| Band 6 | Vegetation Red Edge | 20 | 15 | 0.740 |
| Band 7 | Vegetation Red Edge | 20 | 20 | 0.783 |
| Band 8 | NIR | 10 | 115 | 0.842 |
| Band 8A | Narrow NIR | 20 | 20 | 0.865 |
| Band 9 | Water Vapor | 60 | 20 | 0.945 |
| Band 10 | SWIR-Cirrus | 60 | 30 | 1.380 |
| Band 11 | SWIR | 20 | 90 | 1.610 |
| Band 12 | SWIR | 20 | 180 | 2.190 |
| Temporal Interval | Locality | Polarization Type | PA [%] | UA [%] | OA [%] | Kappa |
|---|---|---|---|---|---|---|
| February 2018 | L1 | VV | 77.4 | 85.7 | 89.7 | 0.789 |
| VH | 79.6 | 78.3 | 91.1 | 0.737 | ||
| L2 | VV | 82.4 | 90.2 | 95.2 | 0.874 | |
| VH | 84.6 | 86.8 | 94.9 | 0.897 | ||
| L3 | VV | 84.9 | 93.1 | 98.6 | 0.917 | |
| VH | 88.3 | 87.4 | 97.6 | 0.899 |
| Type of Speckle Filter | Window Size | Number of Water Pixels | Extend of Water Bodies [km2] |
|---|---|---|---|
| No Filter | - | 17,197 | 1.720 |
| Lee | 3 × 3 | 14,525 | 1.453 |
| Lee | 5 × 5 | 15,094 | 1.509 |
| Lee | 7 × 7 | 10,615 | 1.062 |
| Lee Sigma | 5 × 5 | 13,889 | 1.389 |
| Refined Lee | - | 15,730 | 1.573 |
| Gamma MAP | 3 × 3 | 14,645 | 1.465 |
| Gamma MAP | 5 × 5 | 12,795 | 1.280 |
| Spectral Index Type | Number of Water Pixels | Extend of Water Bodies [km2] |
|---|---|---|
| NDWI | 26,212 | 2621 |
| MNDWI | 27,769 | 2777 |
| AWEInsh | 28,239 | 2824 |
| AWEIsh | 26,571 | 2657 |
| Temporal Interval | Locality | Extraction Method | PA [%] | UA [%] | OA [%] | Kappa |
|---|---|---|---|---|---|---|
| November 2017 | L2 | S2 NDWI | 80.4 | 76.7 | 86.7 | 0.689 |
| S2 MLC Classification | 78.6 | 56.9 | 84.9 | 0.497 | ||
| L3 | S2 NDWI | 84.9 | 72.3 | 90.6 | 0.617 | |
| S2 MLC Classification | 79.8 | 68.4 | 88.2 | 0.529 | ||
| January 2018 | L2 | S2 NDWI | 92.6 | 84.2 | 95.5 | 0.756 |
| S2 MLC Classification | 91.7 | 80.7 | 93.1 | 0.689 | ||
| L3 | S2 NDWI | 95.4 | 90.4 | 97.4 | 0.669 | |
| S2 MLC Classification | 94.1 | 88.6 | 96.0 | 0.541 | ||
| February 2018 | L2 | S2 NDWI | 88.2 | 84.6 | 91.4 | 0.903 |
| S2 MLC Classification | 87.0 | 81.7 | 90.2 | 0.816 | ||
| L3 | S2 NDWI | 83.9 | 75.4 | 89.7 | 0.884 | |
| S2 MLC Classification | 82.6 | 76.3 | 88.6 | 0.769 | ||
| March 2018 | L2 | S2 NDWI | 84.7 | 81.6 | 89.4 | 0.739 |
| S2 MLC Classification | 82.9 | 78.9 | 88.6 | 0.697 | ||
| L3 | S2 NDWI | 87.3 | 79.0 | 87.2 | 0.788 | |
| S2 MLC Classification | 86.7 | 77.3 | 86.3 | 0.713 | ||
| April 2018 | L2 | S2 NDWI | 92.1 | 83.3 | 94.7 | 0.887 |
| S2 MLC Classification | 91.7 | 81.2 | 93.8 | 0.864 | ||
| L3 | S2 NDWI | 95.6 | 91.0 | 97.8 | 0.960 | |
| S2 MLC Classification | 94.7 | 86.4 | 96.9 | 0.958 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kseňak, Ľ.; Pukanská, K.; Bartoš, K.; Blišťan, P. Assessment of the Usability of SAR and Optical Satellite Data for Monitoring Spatio-Temporal Changes in Surface Water: Bodrog River Case Study. Water 2022, 14, 299. https://doi.org/10.3390/w14030299
Kseňak Ľ, Pukanská K, Bartoš K, Blišťan P. Assessment of the Usability of SAR and Optical Satellite Data for Monitoring Spatio-Temporal Changes in Surface Water: Bodrog River Case Study. Water. 2022; 14(3):299. https://doi.org/10.3390/w14030299
Chicago/Turabian StyleKseňak, Ľubomír, Katarína Pukanská, Karol Bartoš, and Peter Blišťan. 2022. "Assessment of the Usability of SAR and Optical Satellite Data for Monitoring Spatio-Temporal Changes in Surface Water: Bodrog River Case Study" Water 14, no. 3: 299. https://doi.org/10.3390/w14030299
APA StyleKseňak, Ľ., Pukanská, K., Bartoš, K., & Blišťan, P. (2022). Assessment of the Usability of SAR and Optical Satellite Data for Monitoring Spatio-Temporal Changes in Surface Water: Bodrog River Case Study. Water, 14(3), 299. https://doi.org/10.3390/w14030299