
Field Investigation of Hydraulics and Fish Guidance Efficiency of a Horizontal Bar Rack-Bypass System


 and
and 
Abstract
:1. Introduction
2. State-of-the-Art Review
3. Materials and Methods
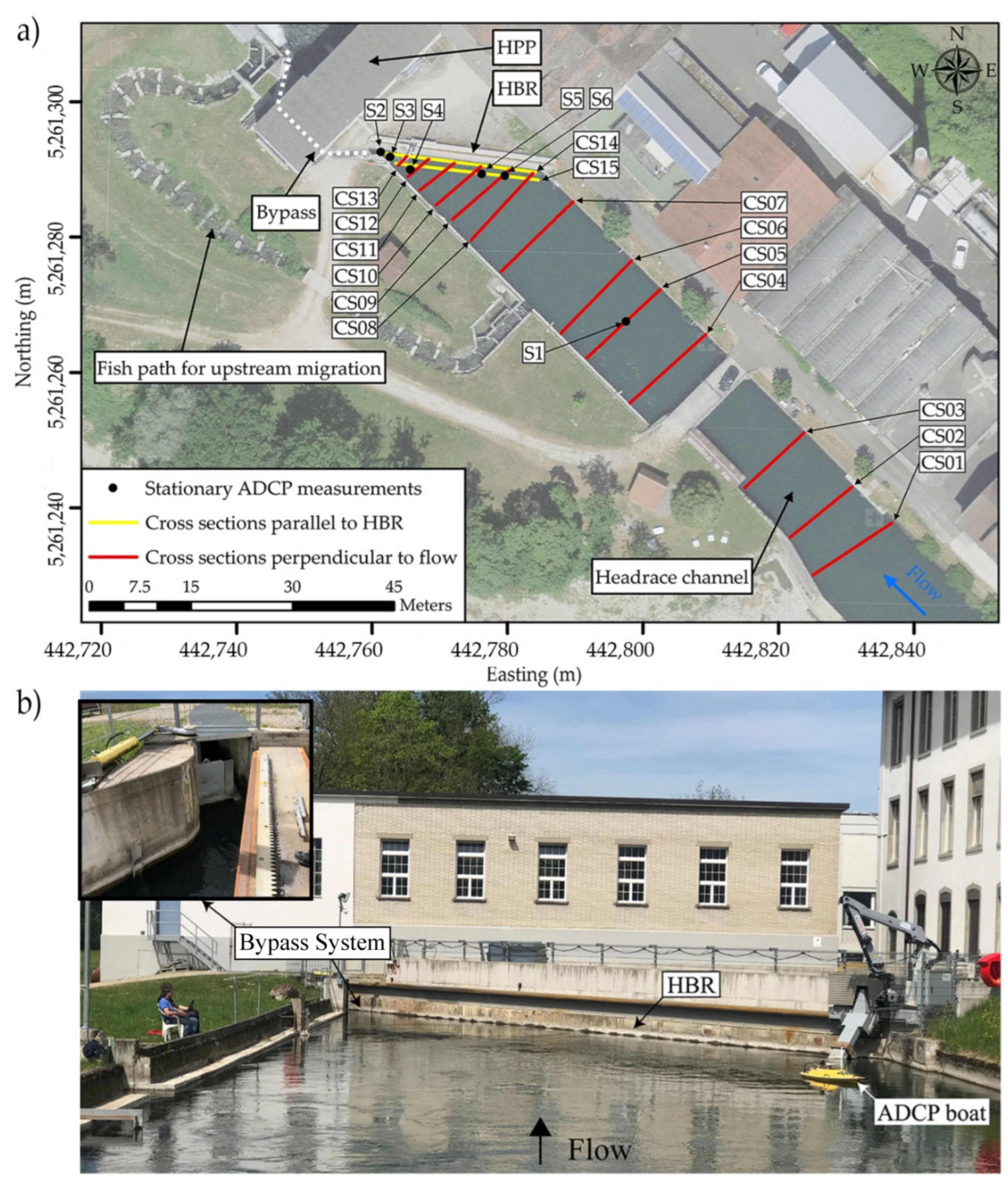
3.1. Study Site
3.2. Hydraulic Measurements
3.3. Fish Monitoring Campaign
4. Results
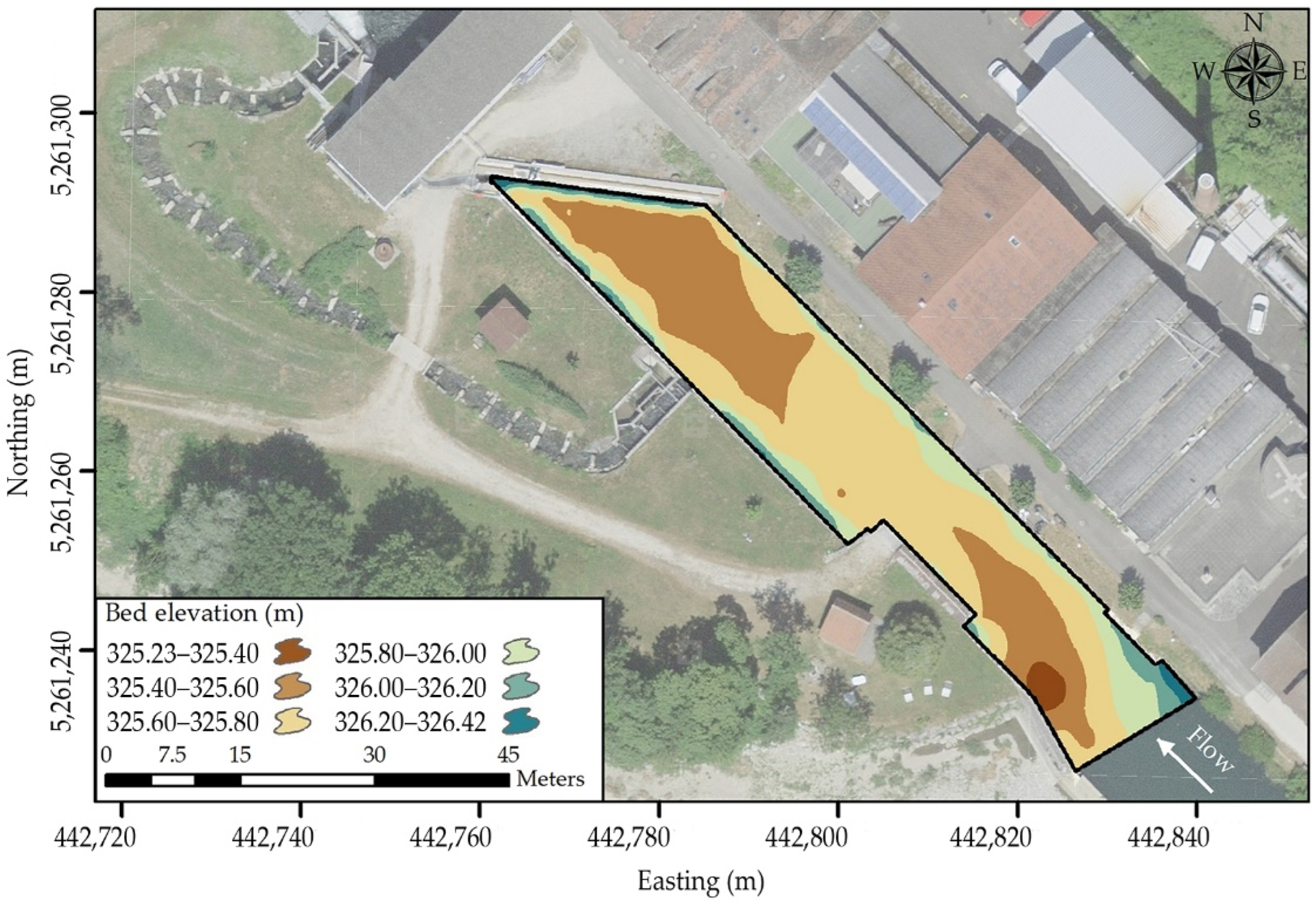
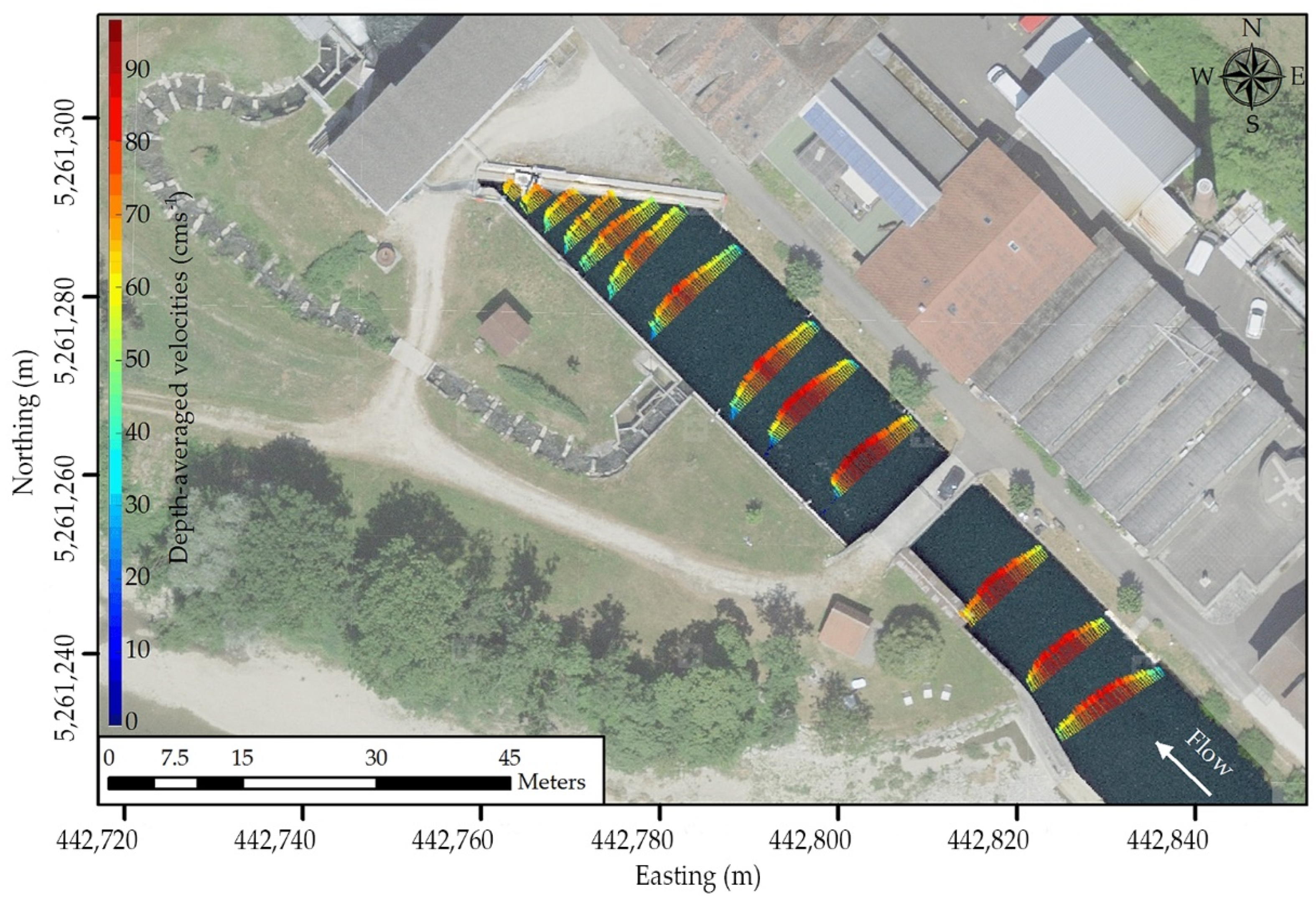
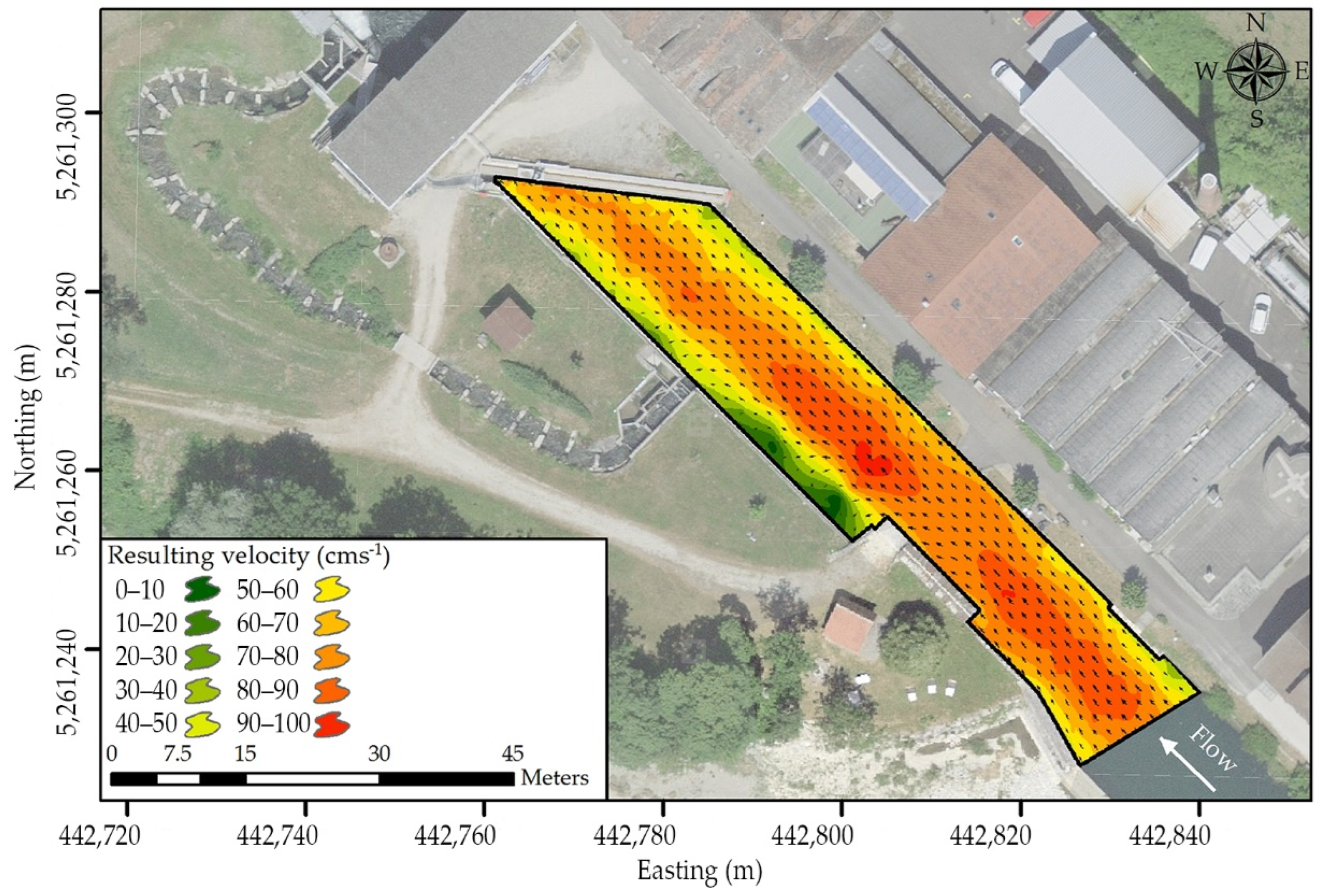
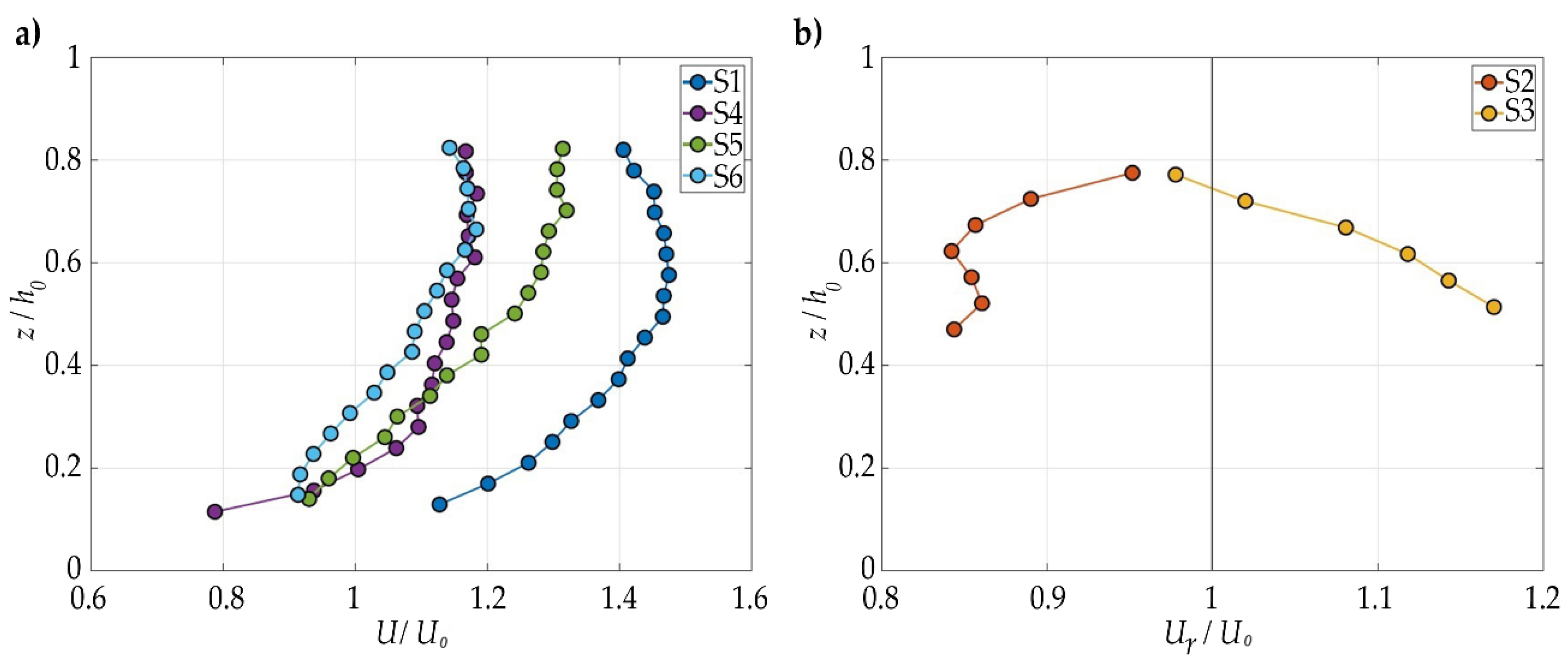
4.1. Flow Field along Headrace Channel
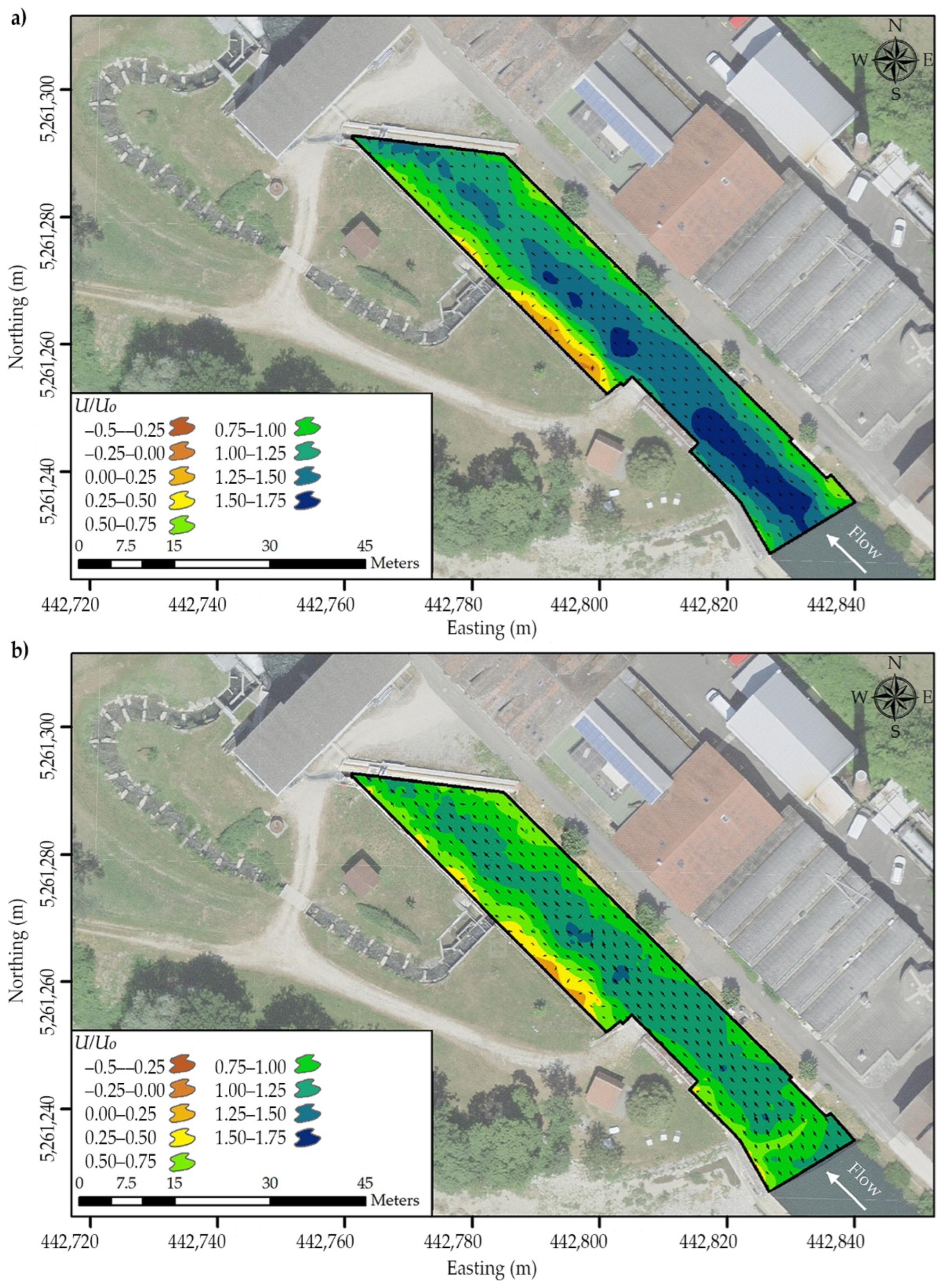
4.2. Flow Field along HBR
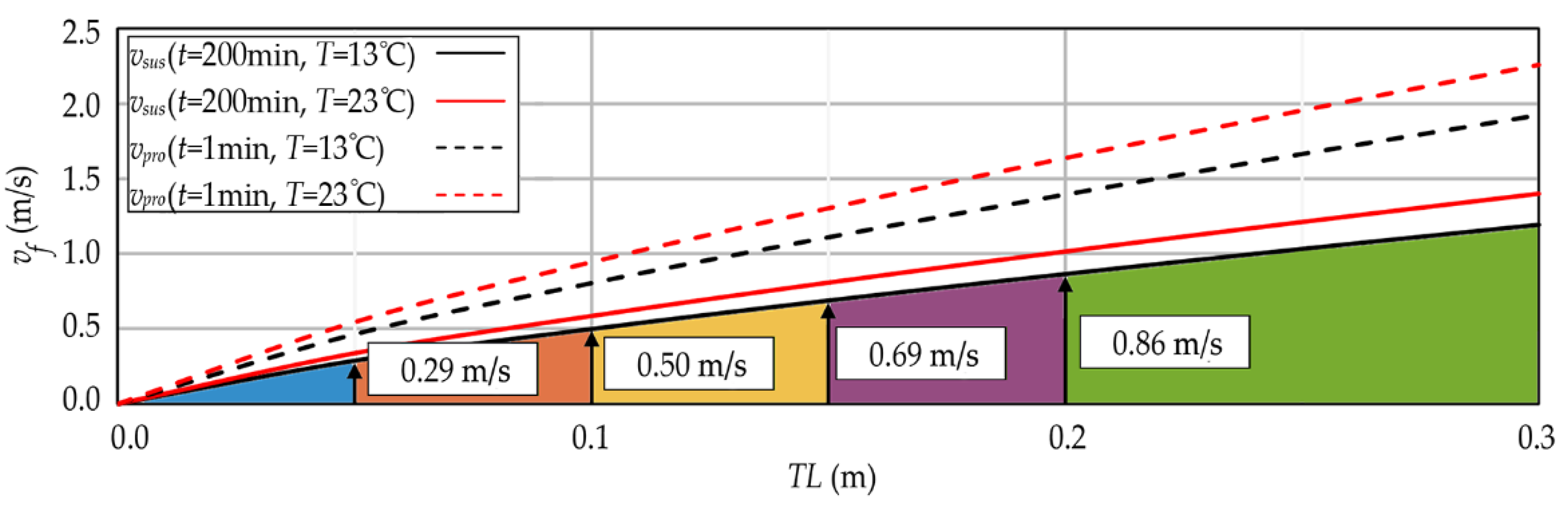
4.3. Fish Swimming Performance and Hydrodynamics
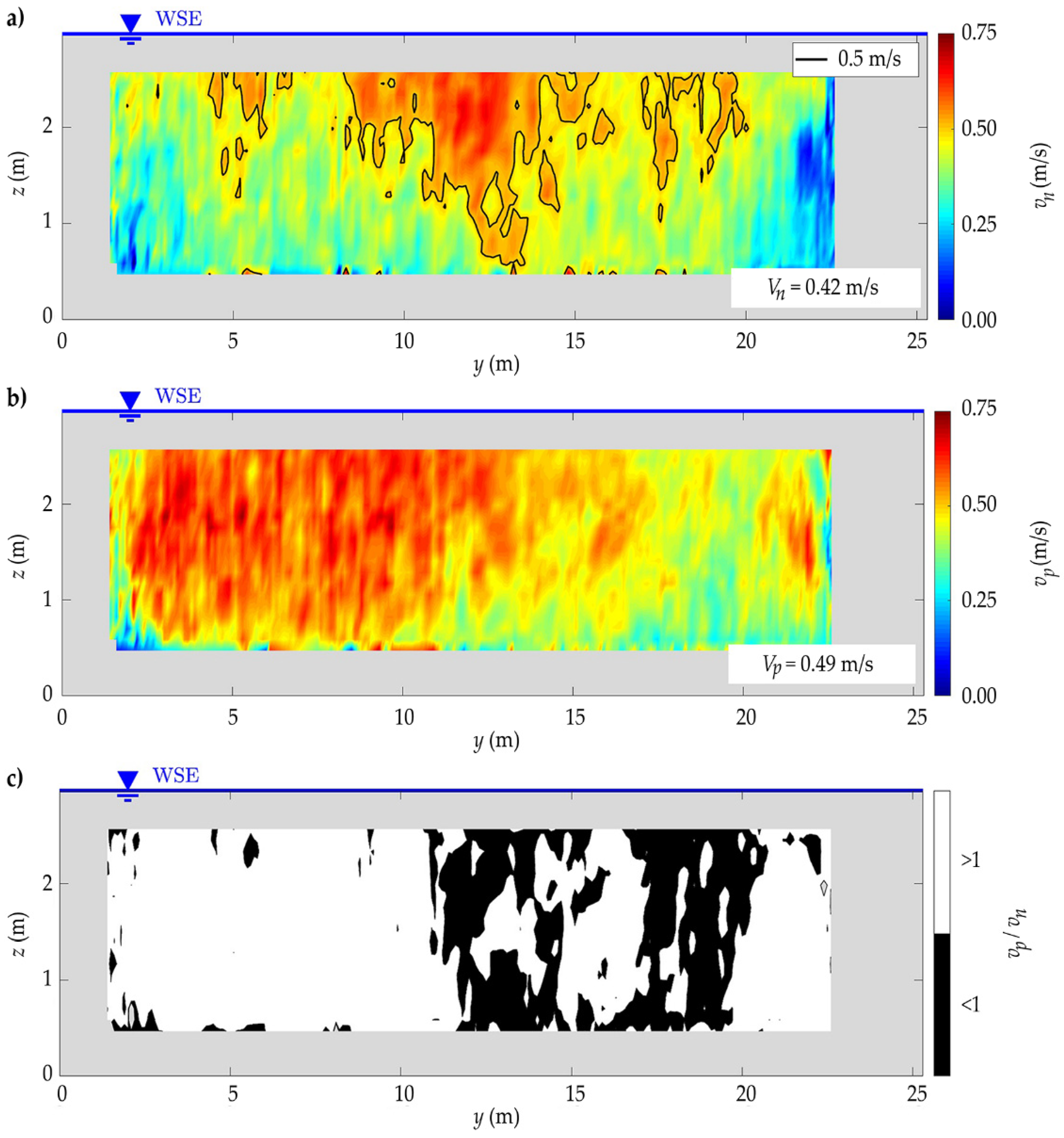
4.4. Flow Field in Front of Bypass
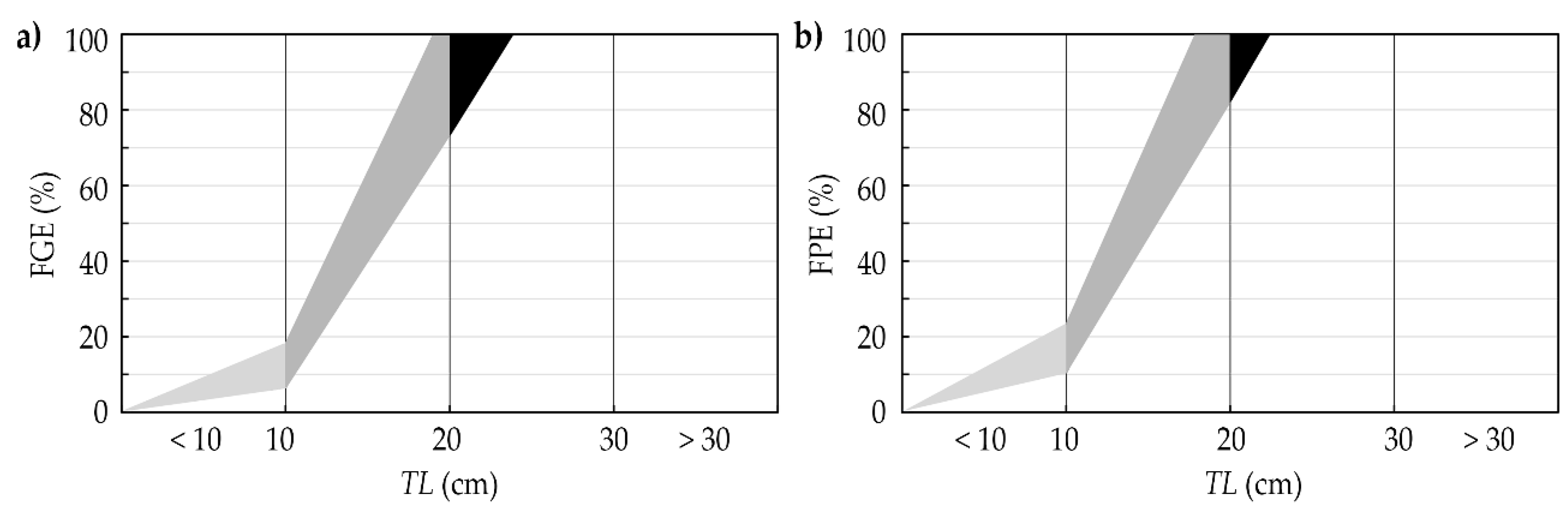
4.5. Estimation of FGE and FPE
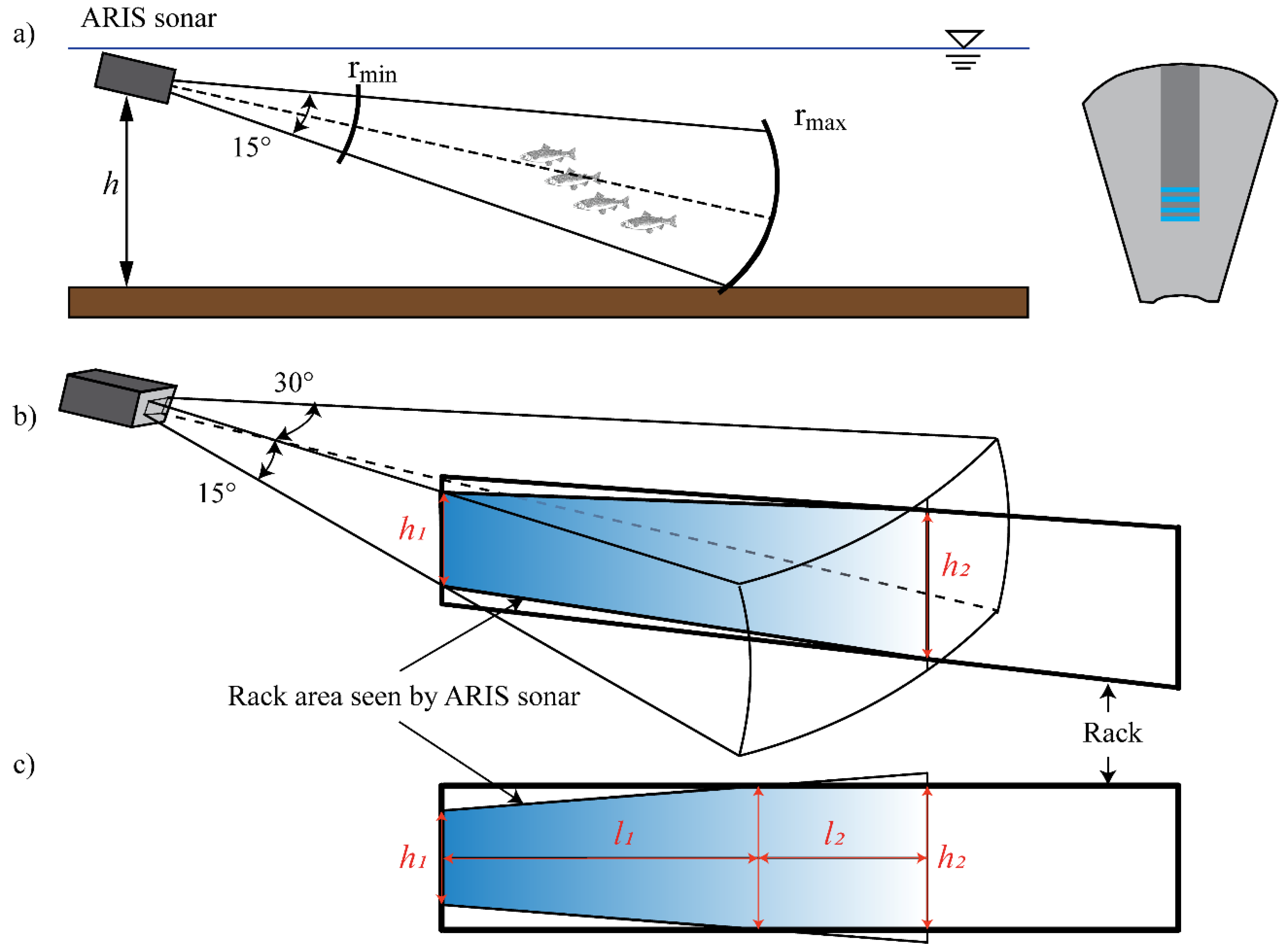
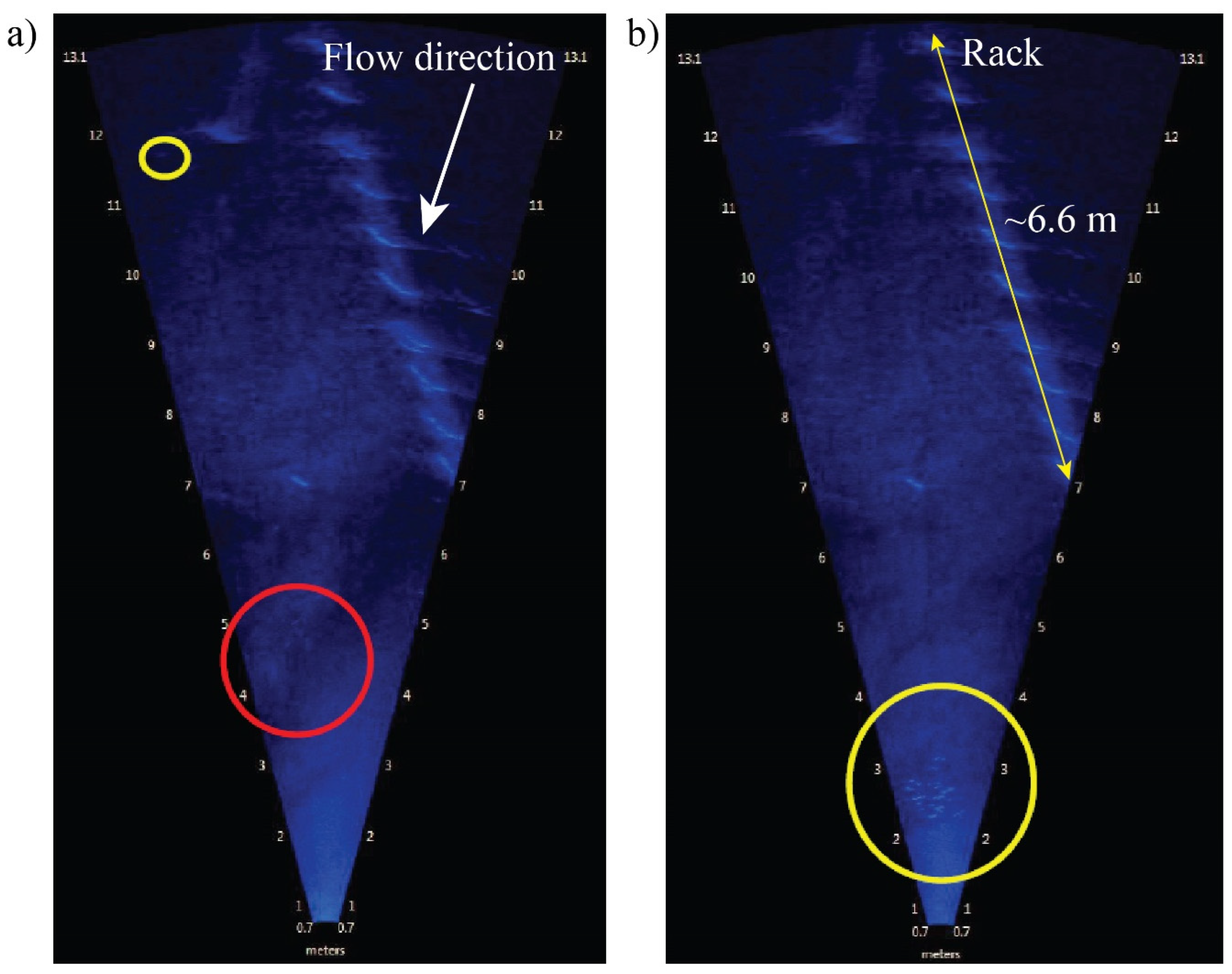
4.6. Fish Behavior and Rack Passage: Video and ARIS Sonar Monitoring Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Larinier, M.; Travade, F. Downstream migration: Problems and facilities. Bull. Fr. Peche Piscic. 2002, 364, 181–207. [Google Scholar] [CrossRef] [Green Version]
- Courret, D.; Larinier, M. Guide Pour la Conception de Prises d’eau “Ichtyo Compatibles” Pour les Petites Centrales Hydroélectriques; Rapport Ghaappe RA.08.04; Agence de l’Environnement et de la Maîtrise de l’Energie (ADEME): Paris, France, 2008. (In French) [Google Scholar]
- Albayrak, I.; Kriewitz, C.R.; Hager, W.H.; Boes, R.M. An experimental investigation on louvres and angled bar racks. J. Hydraul. Res. 2018, 56, 59–75. [Google Scholar] [CrossRef]
- USBR. Fish Protection at Water Diversions: A Guide for Planning and Designing Fish Exclusion Facilities; US Department of the Interior, Bureau of Reclamation: Denver, CO, USA, 2006. [Google Scholar]
- Barrett, J.; Mallen-Cooper, M. The Murray River’s ‘Sea to Hume Dam’ fish passage program: Progress to data and lessons learned. Ecol. Manag. Restor. 2006, 7, 173–183. [Google Scholar] [CrossRef]
- Szabo-Meszaros, M.; Navaratnam, C.U.; Aberle, J.; Silva, A.T.; Forseth, T.; Calles, O.; Fjeldstad, H.-P.; Alfredsen, K. Experimental hydraulics on fish-friendly trash-racks: An ecological approach. Ecol. Eng. 2018, 113, 11–20. [Google Scholar] [CrossRef]
- Dewitte, M.; David, L. Working Basis of Solutions, Models, Tools and Devices and Identification of Their Application Range on A Regional And Overall Level to Attain Self-Sustained Fish Populations (FIThydro Deliverable 2.2). 2019. Available online: https://www.fithydro.eu/deliverable-tech/ (accessed on 17 January 2022).
- Albayrak, I.; Boes, R.; Beck, C.; Meister, J.; David, L.; Lemkecher, F.; Chatellier, L.; Courret, D.; Pineau, G.; Calluaud, D.; et al. Enhancing and Customizing Technical Solutions for Fish Migration (FIThydro Deliverable 3.4). 2020. Available online: https://www.fithydro.eu/deliverables-tech/ (accessed on 17 January 2022).
- Electric Power Research Institute (EPRI); Dominion Millstone Laboratories (DML). Evaluation of Angled Bar Racks and Louvers for Guiding Fish at Water Intakes; Report No. 1005193; EPRI: Palo Alto, CA, USA, 2001. [Google Scholar]
- Raynal, S.; Courret, D.; Chatellier, L.; Larinier, M.; David, L. An experimental study on fish-friendly trashracks—Part 1. Inclined trashracks. J. Hydraul. Res. 2013, 51, 56–66. [Google Scholar] [CrossRef] [Green Version]
- Albayrak, I.; Boes, R.M.; Kriewitz, C.R.; Peter, A.; Tullis, B.P. Fish guidance structures: Hydraulic performance and fish guidance efficiencies. J. Ecohydraul. 2020, 5, 113–131. [Google Scholar] [CrossRef]
- Beck, C. Hydraulic and fish-biological performance of fish guidance structures with curved bars. In Proceedings of the 38th IAHR World Congress, Panama City, Panama, 1–6 September 2019. [Google Scholar] [CrossRef]
- Beck, C.; Albayrak, I.; Meister, J.; Boes, R.M. Hydraulic performance of fish guidance structures with curved bars: Part 1: Head loss assessment. J. Hydraul. Res. 2020, 58, 807–818. [Google Scholar] [CrossRef]
- Beck, C.; Albayrak, I.; Meister, J.; Boes, R.M. Hydraulic performance of fish guidance structures with curved bars: Part 2: Flow fields. J. Hydraul. Res. 2020, 58, 819–830. [Google Scholar] [CrossRef]
- Beck, C.; Albayrak, I.; Meister, J.; Peter, A.; Selz, O.M.; Leuch, C.; Vetsch, D.F.; Boes, R.M. Swimming behavior of downstream moving fish at innovative curved-bar rack bypass systems for fish protection at water intakes. Water 2020, 12, 3244. [Google Scholar] [CrossRef]
- Hoover, J.J.; Zielinski, D.P.; Sorensen, P.W. Swimming performance of adult bighead carp Hypophthalmichthys nobilis (Richardson, 1845) and silver carp H. molitrix (Valenciennes, 1844). J. Appl. Ichthyol. 2017, 33, 54–62. [Google Scholar] [CrossRef]
- Boes, R.M.; Albayrak, I.; Kriewitz, C.R.; Peter, A. Fischschutz und Fischabstieg mittels vertikaler Leitrechen Bypass Systeme: Rechenverluste und Leiteffizienz (‘Fish protection and fish downstream passage using vertical fish guidance racks’). WasserWirtschaft 2016, 106, 29–35. (In German) [Google Scholar] [CrossRef]
- Meister, J.; Fuchs, H.; Beck, C.; Albayrak, I.; Boes, R.M. Velocity fields at horizontal bar racks as fish guidance structures. Water 2020, 12, 280. [Google Scholar] [CrossRef] [Green Version]
- Meister, J.; Fuchs, H.; Beck, C.; Albayrak, I.; Boes, R.M. Head losses of horizontal bar racks as fish guidance structures. Water 2020, 12, 475. [Google Scholar] [CrossRef] [Green Version]
- Zaugg, C.; Mendez, R. Kleinwasserkraftwerk Stroppel—Wirkungskontrolle Fischabstieg am Horizontalrechen mit Bypass (‘Small-Scale HPP Stroppel—Evaluation of the Fish Downstream Passage Effectiveness at the HBR-BS’). Report H16674, Axpo Kleinwasserkraft AG. 2018. Available online: https://plattform-renaturierung.ch/wp-content/uploads/2019/04/KWKSt-2018.09.04-Bericht-Erfolgskontrolle-Fischabstieg_inkl.-Anhang_final.pdf (accessed on 17 January 2022). (In German).
- Meister, J. Fish protection and guidance at water intakes with horizontal bar rack bypass systems. In VAW-Mitteilung 258; Boes, R., Ed.; Laboratory of Hydraulics, Hydrology and Glaciology (VAW): ETH Zurich, Switzerland, 2020. [Google Scholar]
- Ebel, G. Fischschutz und Fischabstieg an Wasserkraftanlagen—Handbuch Rechen-und Bypasssysteme. Ingenieurbiologische Grundlagen, Modellierung und Prognose, Bemessung und Gestaltung (‘Fish Protection and Downstream Passage at Hydropower Plants—Handbook of Rack and Bypass Systems. Basics of Engineering Biology, Modelling and Prediction, Design and Layout’), 2nd ed.; Büro für Gewässerökologie und Fischereibiologie Dr. Ebel: Halle, Germany, 2016. (In German) [Google Scholar]
- Albayrak, I.; Maager, F.; Boes, R.M. An experimental investigation on fish guidance structures with horizontal bars. J. Hydraul. Res. 2020, 58, 516–530. [Google Scholar] [CrossRef]
- Ebel, G. Biologische Wirksamkeit von Leitrechen-Bypass-Systemen: Aktueller Kenntnisstand (‘Biological effectiveness of fish guidance rack—bypass sytems: Current state of knowledge’). WasserWirtschaft 2020, 12, 18–27. (In German) [Google Scholar] [CrossRef]
- Travade, F.; Larinier, M. French experience in downstream migration devices. In Free Passage for Aquatic Fauna in Rivers and Other Water Bodies; German Associatation for Water, Wastewater and Waste (DWA): Hennef, Germany, 2006. [Google Scholar]
- Russon, I.J.; Kemp, P.S. Advancing provision of multi-species fish passage: Behavior of adult European eel (Anguilla Anguilla) and brown trout (Salmo trutta) in response to accelerating flow. Ecol. Eng. 2011, 37, 2018–2024. [Google Scholar] [CrossRef]
- Berger, C. Verluste und Auslegung von Schrägrechen anhand ethohydraulischer Studien (‘Head losses and design of angled racks based on etho-hydraulic studies’). WasserWirtschaft 2020, 12, 10–17. [Google Scholar] [CrossRef]
- Ebel, G.; Kehl, M.; Gluch, A. Fortschritte beim Fischschutz und Fischabstieg: Inbetriebnahme der Pilot-Wasserkraftanlagen Freyburg und Öblitz (‘Progress with fish protection and downstream passage: Commissioning of the pilot hydropower plants Freyburg and Öblitz’). WasserWirtschaft. 2018, 108, 54–62. (In German) [Google Scholar] [CrossRef] [Green Version]
- Ebel, G.; Gluch, A.; Kehl, M. Einsatz des Leitrechen-Bypass-Systems nach Ebel, Gluch & Kehl an Wasserkraftanlagen—Grundlagen, Erfahrungen und Perspektiven (‘Application of fish guidance bypass systems according to Ebel, Gluch & Kehl at hydropower plants—basics, experiences and perspectives’). Wasserwirtschaft 2015, 105, 44–50. (In German) [Google Scholar]
- Nyqvist, D.; Elghagen, J.; Heiss, M.; Calles, O. An angled rack with a bypass and a nature-like fishway pass Atlantic salmon smolts downstream at a hydropower dam. Mar. Freshw. Res. 2018, 69, 1894–1904. [Google Scholar] [CrossRef]
- Wagner, F.; Warth, P.; Schmalz, W. Evaluierung von Fischschutz-und Fischabstiegsmaßnahmen an einem Wasserkraftstandort für die Umsetzung des WHG § 35 (‘Evaluation of Fish Protection and Downstream Passage Measures at a Hydropower Site for the Implementation of the Federal Water Act § 35’); Final Report; Umweltbundesamt: Dessau-Roßlau, Germany, 2021. (In German) [Google Scholar]
- Map.geo.admin.ch. Available online: https://map.geo.admin.ch (accessed on 28 May 2019).
- Parsons, D.R.; Jackson, P.R.; Czuba, J.A.; Engel, F.L.; Rhoads, B.L.; Oberg, K.A.; Best, J.L.; Mueller, D.S.; Johnson, K.K.; Riley, J.D. Velocity Mapping Toolbox (VMT): A processing and visualization suite for moving-vessel ADCP measurements. Earth. Surf. Proc. Land. 2012, 38, 1244–1260. [Google Scholar] [CrossRef]
- Federal Office for the Environment FOEN. Available online: https://www.hydrodaten.admin.ch/en/2243.html (accessed on 1 September 2019).
- Albayrak, I.; Lemmin, U. Secondary currents and corresponding surface velocity patterns in a turbulent open-channel flow over a rough bed. J. Hydraul. Eng. 2011, 137, 1318–1334. [Google Scholar] [CrossRef]
- Auel, C.; Albayrak, I.; Boes, R.M. Turbulence characteristics in supercritical open channel flows: Effects of Froude number and aspect ratio. J. Hydraul. Eng. 2014, 140, 4014004. [Google Scholar] [CrossRef]
- Demiral, D.; Boes, R.M.; Albayrak, I. Effects of secondary currents on turbulence characteristics of supercritical open channel flows at low aspect ratios. Water. 2020, 12, 3233. [Google Scholar] [CrossRef]
- Nezu, I.; Nakagawa, H. Turbulence in Open-Channel Flows; IAHR-AIRH Monograph Series; Balkema: Rotterdam, The Netherlands, 1993. [Google Scholar] [CrossRef]
- Turnpenny, A.W.H.; O’Keeffe, N. Screening for Intake and Outfalls: A Best Practice Guide; Technical Report SC030231; Environment Agency: Bristol, UK, 2005. [Google Scholar]
- Schwevers, U.; Adam, B. Biometrie einheimischer Fischarten als Grundlage für die Bemessung von Fischwegen und Fischschutzanlagen (Biometry of indigenous fish species as a basis for the design of fish passes and fish protection facilities’). Wasser Abfall. 2019, 1, 46–52. (In German) [Google Scholar] [CrossRef]
- Schwevers, U.; Adam, B. Fish Protection Technologies and Fish Ways for Downstream Migration; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Hefti, D. Wiederherstellung der Fischauf-und-Abwanderung bei Wasserkraftwerken. Checkliste Best Practice (‘Restoration of Fish Upstream and Downstream Migration at Hydropower Plants, Check List of Best Practice’); Swiss Federal Office for the Environment (SFOE): Bern, Switzerland, 2012. (In German) [Google Scholar]
- LUBW. Handreichung Fischschutz und Fischabstieg an Wasserkraftanlagen—Fachliche Grundlagen (‘Helping Hand Fish Protection and Downstream Passage at Hydropower Plants—Technical Basics’); Technical Report; Landesanstalt für Umwelt, Messungen und Naturschutz Baden-Württemberg: Karlsruhe, Germany, 2016. (In German) [Google Scholar]
- Burwen, D.L.; Fleischman, S.J.; Miller, J.D. Evaluation of a Dual Frequency Imaging Sonar for Detecting and Estimating the Size of migrating Salmon (Fishery Data Series No. 07–44); Alaska Department of Fish and Game: Anchorage, AK, USA, 2007. [Google Scholar]
- Burwen, D.L.; Fleischman, S.J.; Miller, J.D. Accuracy and precision of salmon length estimates taken from DIDSON sonar images. T. Am. Fish. Soc. 2010, 139, 1306–1314. [Google Scholar] [CrossRef]
- Cook, D.; Middlemiss, K.; Jaksons, P.; Davison, W.; Jerrett, A. Validation of fish length estimations from a high frequency multi-beam sonar (ARIS) and its utilisation as a field-based measurement technique. Fish. Res. 2019, 218, 59–68. [Google Scholar] [CrossRef]
- Tušer, M.; Frouzová, J.; Balk, H.; Muška, M.; Mrkvička, T.; Kubecka, J. Evaluation of potential bias in observing fish with a DIDSON acoustic camera. Fish. Res. 2014, 155, 114–121. [Google Scholar] [CrossRef]
- Helminen, J.; Dauphin, G.J.R.; Linnansaari, T. Length measurement accuracy of adaptive resolution imaging sonar and a predictive model to assess adult Atlantic salmon (Salmo salar) into two size categories with long-range data in a river. J. Fish Biol. 2020, 97, 1009–1026. [Google Scholar] [CrossRef]
- Egg, L.; Pander, J.; Mueller, M.; Geist, J. Comparison of sonar-, camera-and net-based methods in detecting riverine fish-movement patterns. Mar. Freshw. Res. 2018, 69, 1905–1912. [Google Scholar] [CrossRef]
- Enders, E.C.; Gessel, M.H.; Anderson, J.J.; Williams, J.G. Effects of decelerating and accelerating flows on juvenile salmonid behavior. T. Am. Fish. Soc. 2012, 141, 357–364. [Google Scholar] [CrossRef]
- Silva, A.T.; Katopodis, C.; Tachie, M.F.; Santos, J.M.; Ferreira, M.T. Downstream swimming behaviour of catadromous and potamodromous fish over spillways. River. Res. Appl. 2016, 32, 935–945. [Google Scholar] [CrossRef]
- Haro, A.; Odeh, M.; Noreike, J.; Castro-Santos, T. Effect of water acceleration on downstream migratory behavior and passage of Antlantic salmon smolts and juvenile American shad at surface bypasses. T. Am. Fish. Soc. 1998, 127, 118–127. [Google Scholar] [CrossRef]
- Nestler, J.M.; Goodwin, R.A.; Smith, D.L.; Anderson, J.J.; Li, S. Optimum fish passage and guidance designs are based in the hydrogeomorphology of natural rivers. River. Res. Appl. 2008, 24, 148–168. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Country | HPP Name | River | Qd (m3/s) | Qb (m3/s) | Qb/Qd (%) | sb (mm) | Vn (max) (m/s) | α (°) |
|---|---|---|---|---|---|---|---|---|
| Germany | Freyburg 1 | Unstrut | 25.5 | 1.10 | 4.30 | 10 | 0.30 | 38 |
| Germany | Halle-Planena 1 | Saale | 50 | 1.30 | 2.60 | 20 | 0.45 | 45 |
| Germany | Raguhn 1 | Mulde | 88 | 1.00 | 1.14 | 20 | 0.70 | 65 |
| Germany | Rothenburg 1 | Saale | 68 | 1.45 | 2.30 | 20 | 0.54 | 38 |
| Germany | Rappenberghalde 1 | Neckar | 14 | 0.16 | 1.18 | 15 | 0.30 (0.68) 2 | 30 |
| Sweden | Herting 3 | Ätran | 40 | 3.00 | 7.50 | 15 | 0.50 | 30 |
| Switzerland | Stroppel 4 | Limmat | 33 | 0.69 | 2.10 | 20 | 0.48 | 38 |
| Date | Five Main Monitoring Blocks | Nine Short Sampling Periods | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 15–18 September 2015 1 | 20–23 September 2015 1 | 10–12 May 2016 | 2–4 August 2016 | 25–27 October 2016 2 | 20 July 2016 | 21 July 2016 | 1 September 2016 | 30 September 2016 | 10 October 2016 | 17 October 2016 | 23 October 2016 | 10 November 2016 | 8 December 2016 | |
| Duration (hour) | 70 | 72 | 48 | 48 | 38 | 2 | 3 | 4.25 | 3 | 3.5 | 3 | 3.75 | 2.75 | 3.5 |
| Water temperature (°C) | 19 | 13 | 13 | 22 | 13 | 22 | 23 | 23 | 19 | 15 | 14 | 13 | 11 | 7 |
| River discharge (m3/s) | 47 | 73 | 96 | 96 | 67 | 143 | 138 | 61 | 60 | 39 | 43 | 46 | 73 | 56 |
| Number of collected fish | 88 | 2198 | 160 | 76 | 6239 | 130 | 4 | 3 | 31 | 16 | 59 | 587 | 1727 | 30 |
| Length Classes (cm) | Percentage (%) |
|---|---|
| <10 | 86 |
| 10 to 20 | 12 |
| 20 to 30 | 1 |
| >30 | 1 |
| Measurement Time | Fishes Downstream of the Rack Detected by ARIS Sonar | Fishes Collected at the Exit of the Bypass | Rack Passage Ratio |
|---|---|---|---|
| 25 October 2016 (18:30–19:00) | 15 | 758 | 1.9% |
| 25. October 2016 (19:00–20:00) | 50 | 528 | 8.7% |
| 25 October 2016 (20:00–21:00) | 40 | 913 | 4.2% |
| 25 October 2016 (20:00)–26 October 2016 (15:00) | 8 | 154 | 4.9% |
| 26 October 2016 (15:00–18:00) | 2 | 1447 | 0.1% |
| 26 October 2016 (18:00–23:00) | 12 | 1884 | 0.6% |
| Total | 127 | 5684 | 2.2% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maddahi, M.; Hagenbüchli, R.; Mendez, R.; Zaugg, C.; Boes, R.M.; Albayrak, I. Field Investigation of Hydraulics and Fish Guidance Efficiency of a Horizontal Bar Rack-Bypass System. Water 2022, 14, 776. https://doi.org/10.3390/w14050776
Maddahi M, Hagenbüchli R, Mendez R, Zaugg C, Boes RM, Albayrak I. Field Investigation of Hydraulics and Fish Guidance Efficiency of a Horizontal Bar Rack-Bypass System. Water. 2022; 14(5):776. https://doi.org/10.3390/w14050776
Chicago/Turabian StyleMaddahi, Mohammadreza, Roland Hagenbüchli, Ricardo Mendez, Claudia Zaugg, Robert Michael Boes, and Ismail Albayrak. 2022. "Field Investigation of Hydraulics and Fish Guidance Efficiency of a Horizontal Bar Rack-Bypass System" Water 14, no. 5: 776. https://doi.org/10.3390/w14050776
APA StyleMaddahi, M., Hagenbüchli, R., Mendez, R., Zaugg, C., Boes, R. M., & Albayrak, I. (2022). Field Investigation of Hydraulics and Fish Guidance Efficiency of a Horizontal Bar Rack-Bypass System. Water, 14(5), 776. https://doi.org/10.3390/w14050776