
Experimental Investigation of the Coupling Effect of Jackup Offshore Platforms, Towers, and Seabed Foundations under Waves of Large Wave Height

Abstract
:1. Introduction
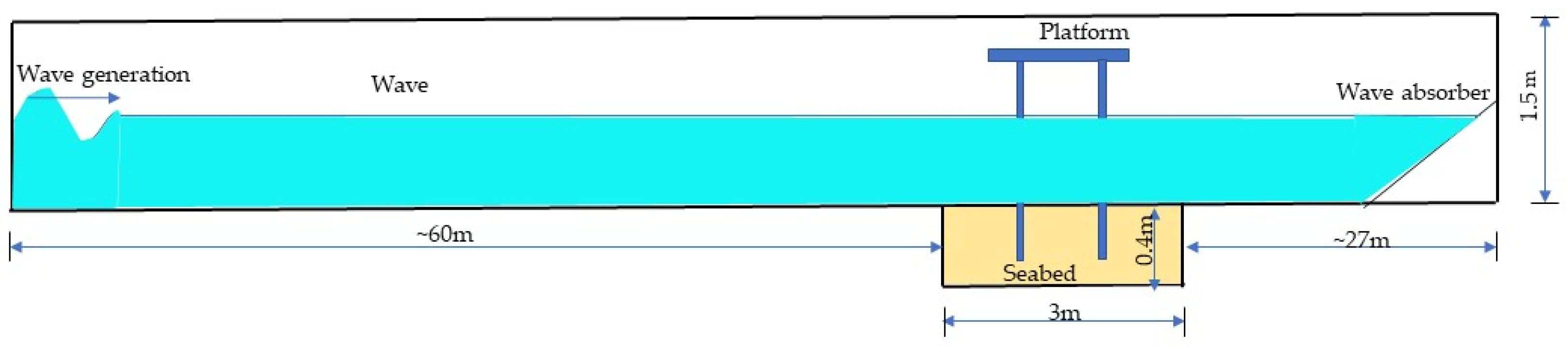
2. Experimental Design
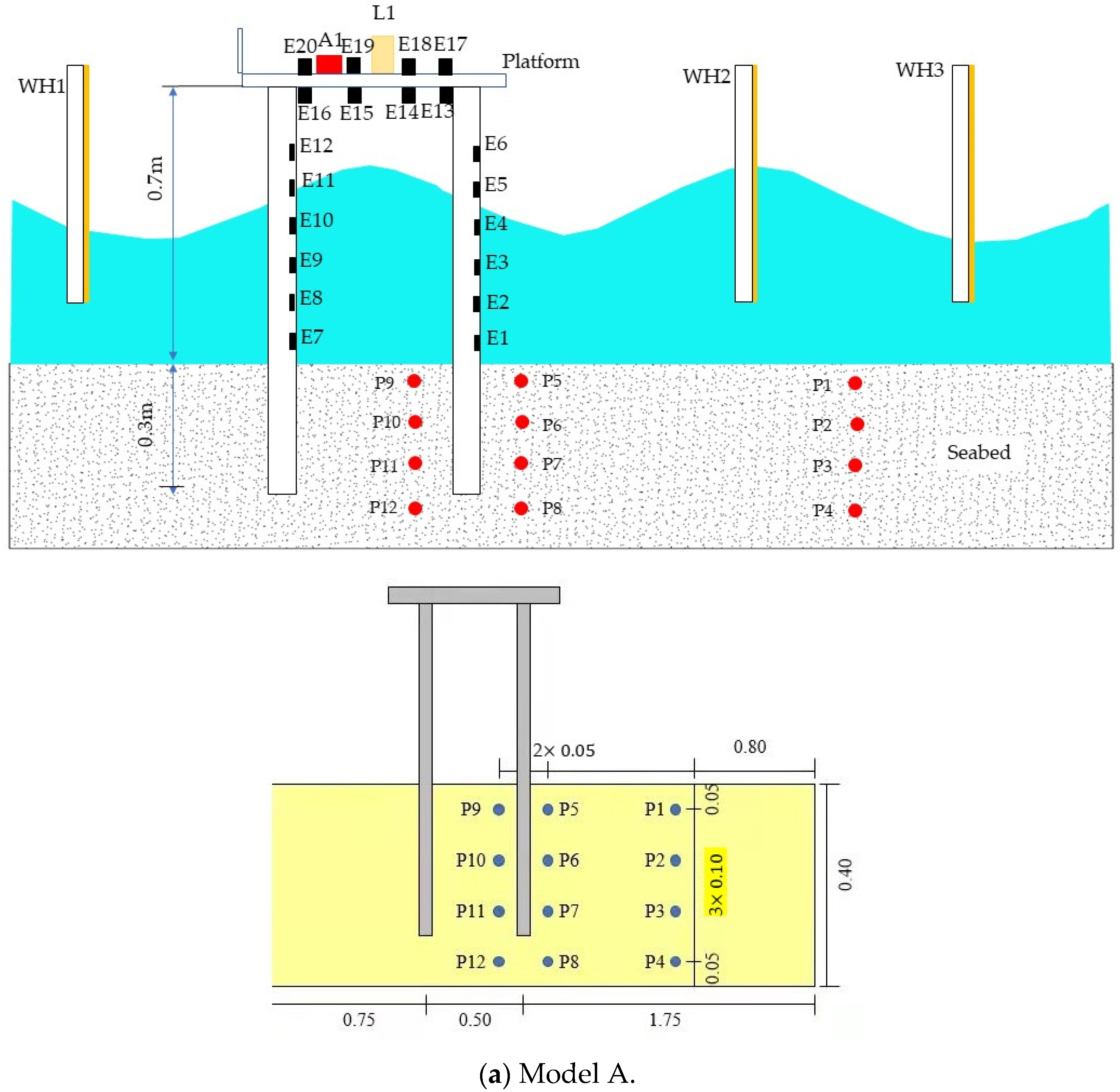
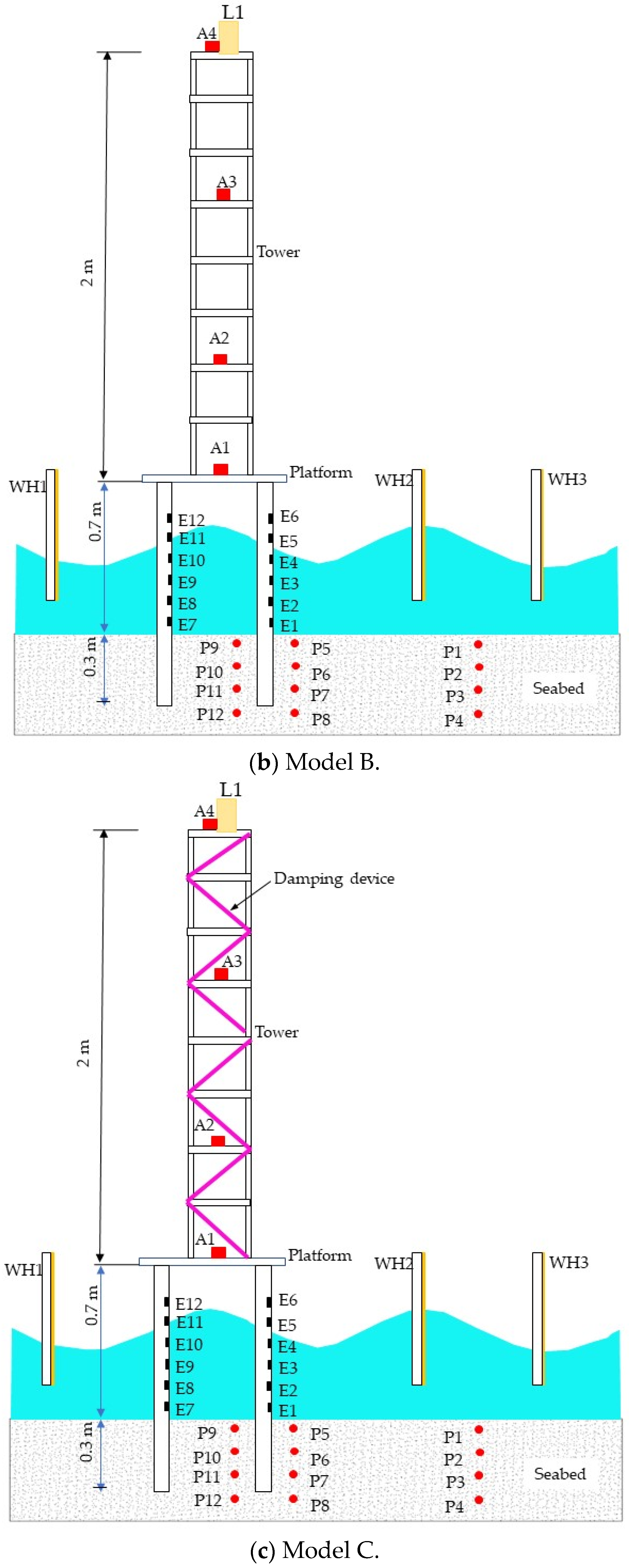
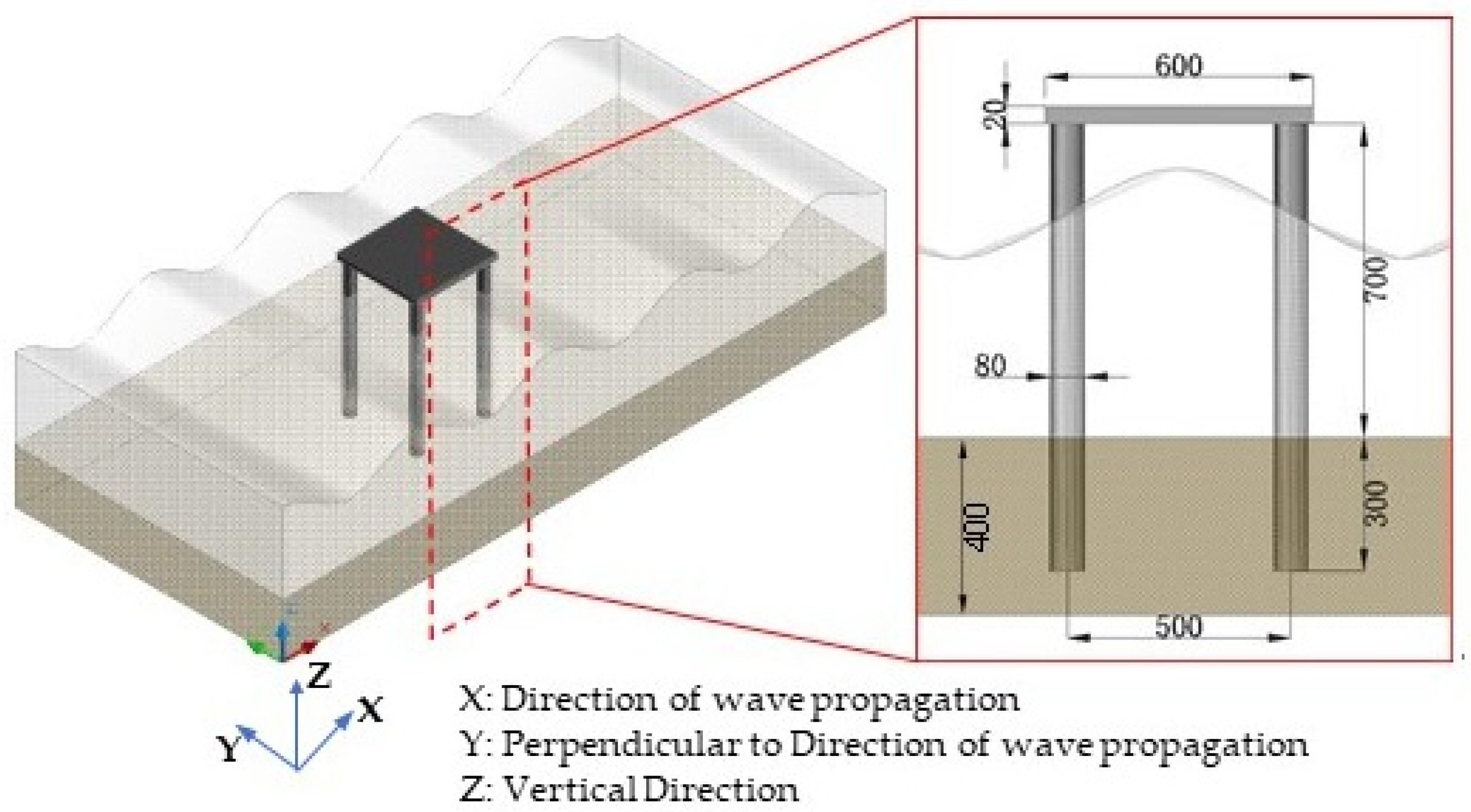
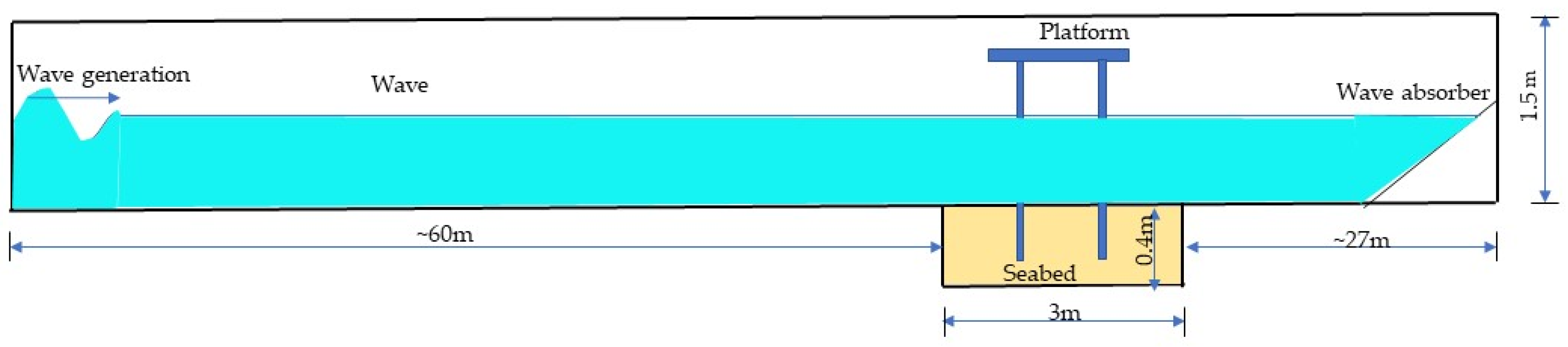
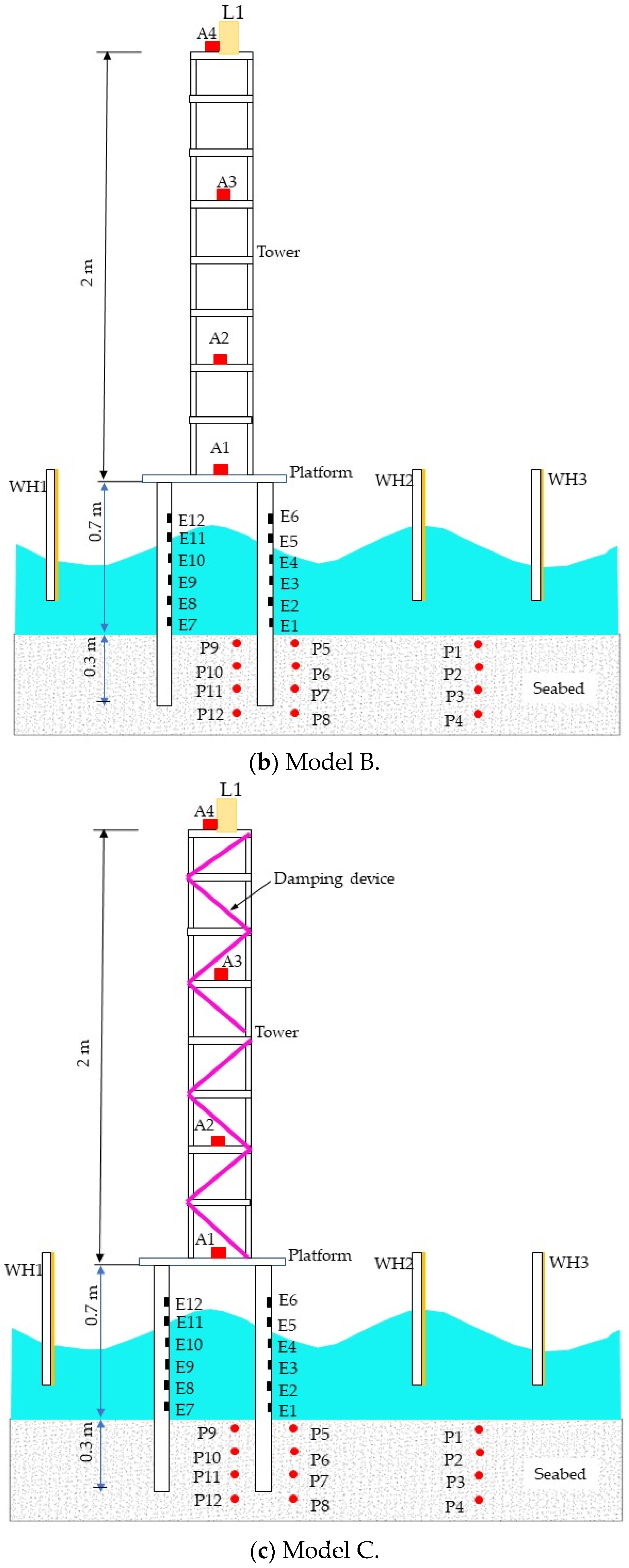
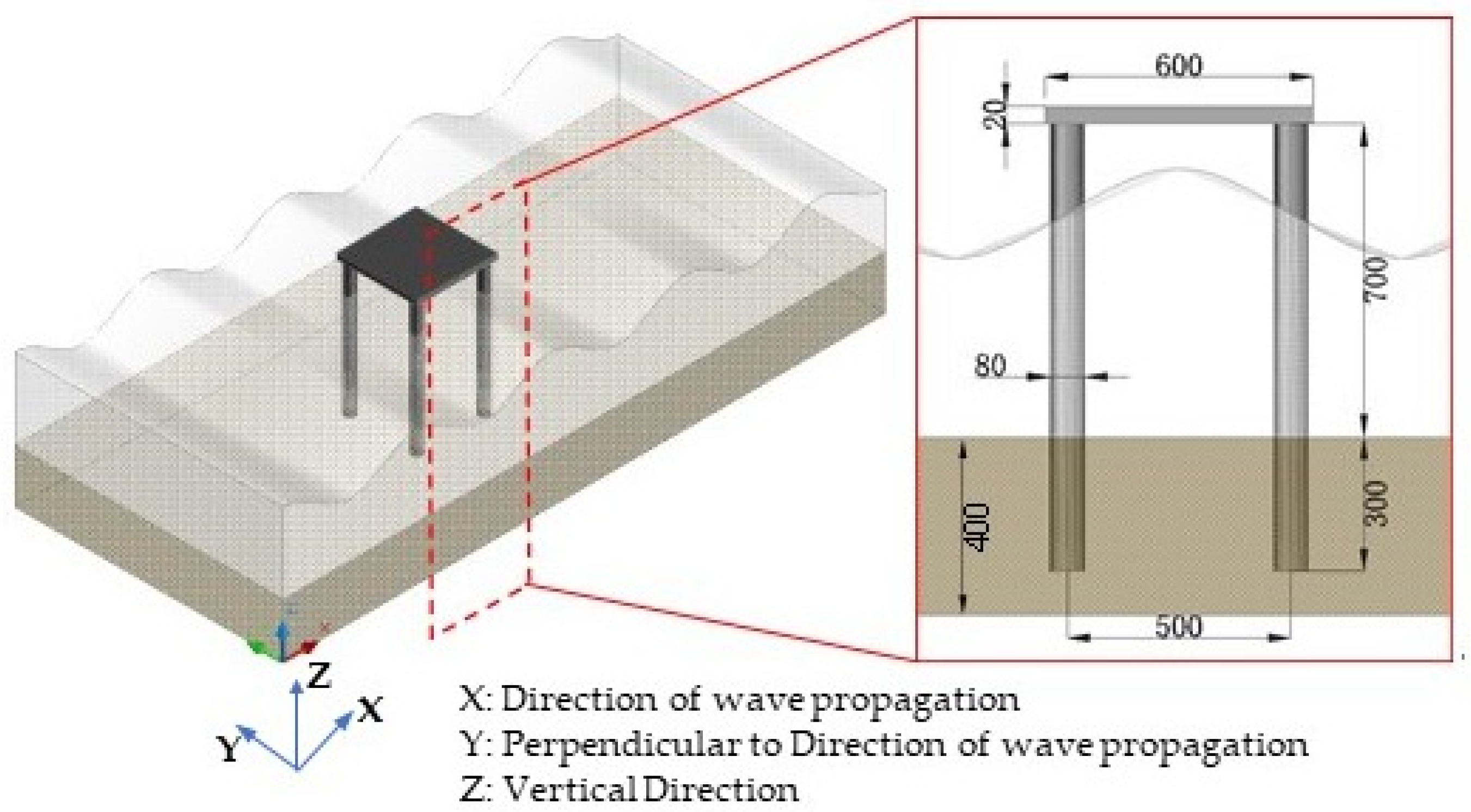
2.1. Experimental Model
2.2. Experimental Procedure
- (1)
- Rinse the flume and the soil box with water before the experiment.
- (2)
- The soil foundation model is made layer by layer, for a total of four layers, each of which is 10 cm high. The platform structure is placed and the pore-pressure sensor is buried according to the design.
- (3)
- (4)
- Water is added to the tank to the prescribed water level for saturation. Considering the poor permeability of the foundation soil, the saturation time of the model’s foundation should be more than 24 h to make the foundation fully saturated.
- (5)
- A preliminary experiment for calibrating the wave parameters is carried out; a total of five wave-height meters are placed at the center of the model and at 1 m intervals before and after it to measure the wave surface process, comparing the test spectrum and the theoretical spectrum.
- (6)
- The experiment of Model A commences, according to the experimental conditions shown in Table 3.
- (7)
- Repeat steps 5–6 for the next wave condition after model A’s testing is completed, and steps 3–6 when model A is changed to model B.
- (8)
- Repeat steps 5–6 for the next wave condition after model B’s testing is completed, and steps 3–6 when model B is changed to model C.
2.3. Experimental Conditions
3. Experiment Results
3.1. Simulation Results of the Dynamic Response of the Jackup Offshore Platform Structure under Wavess
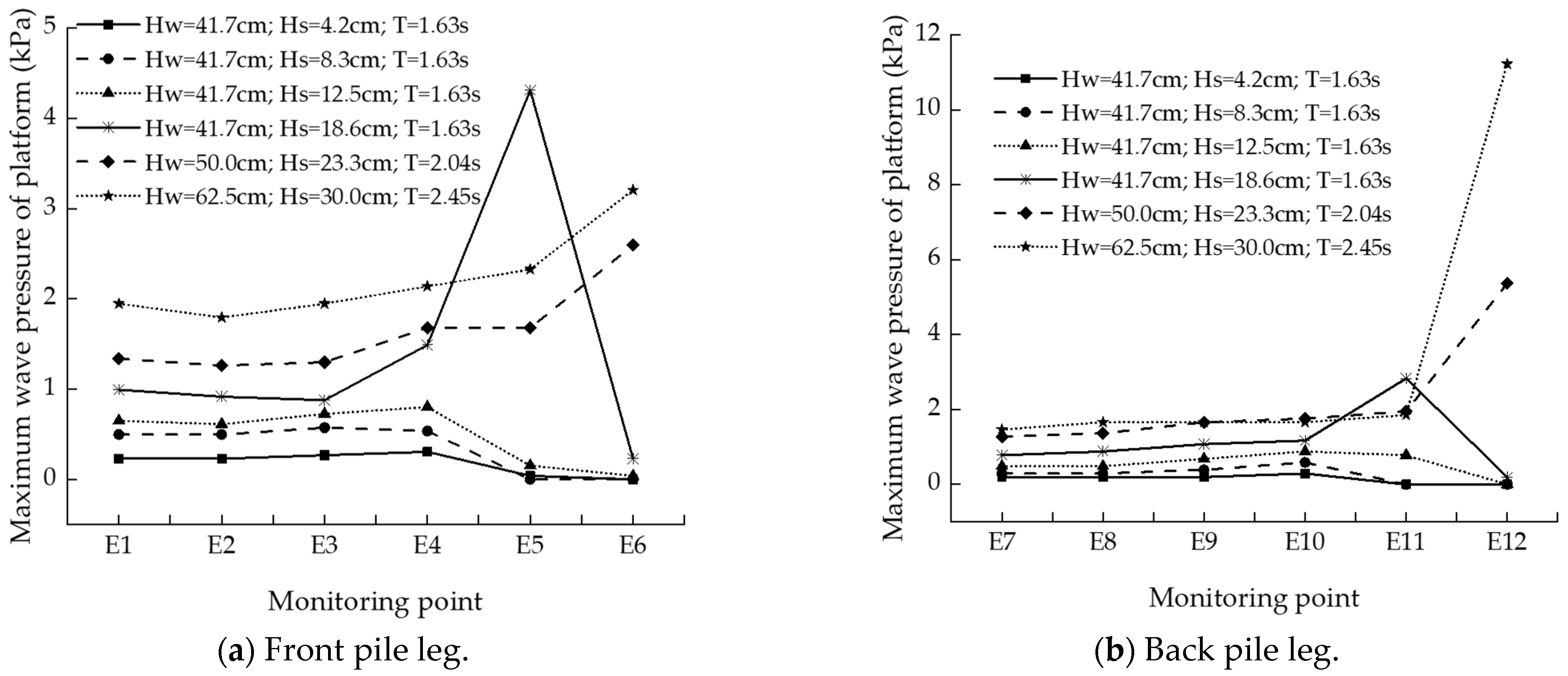
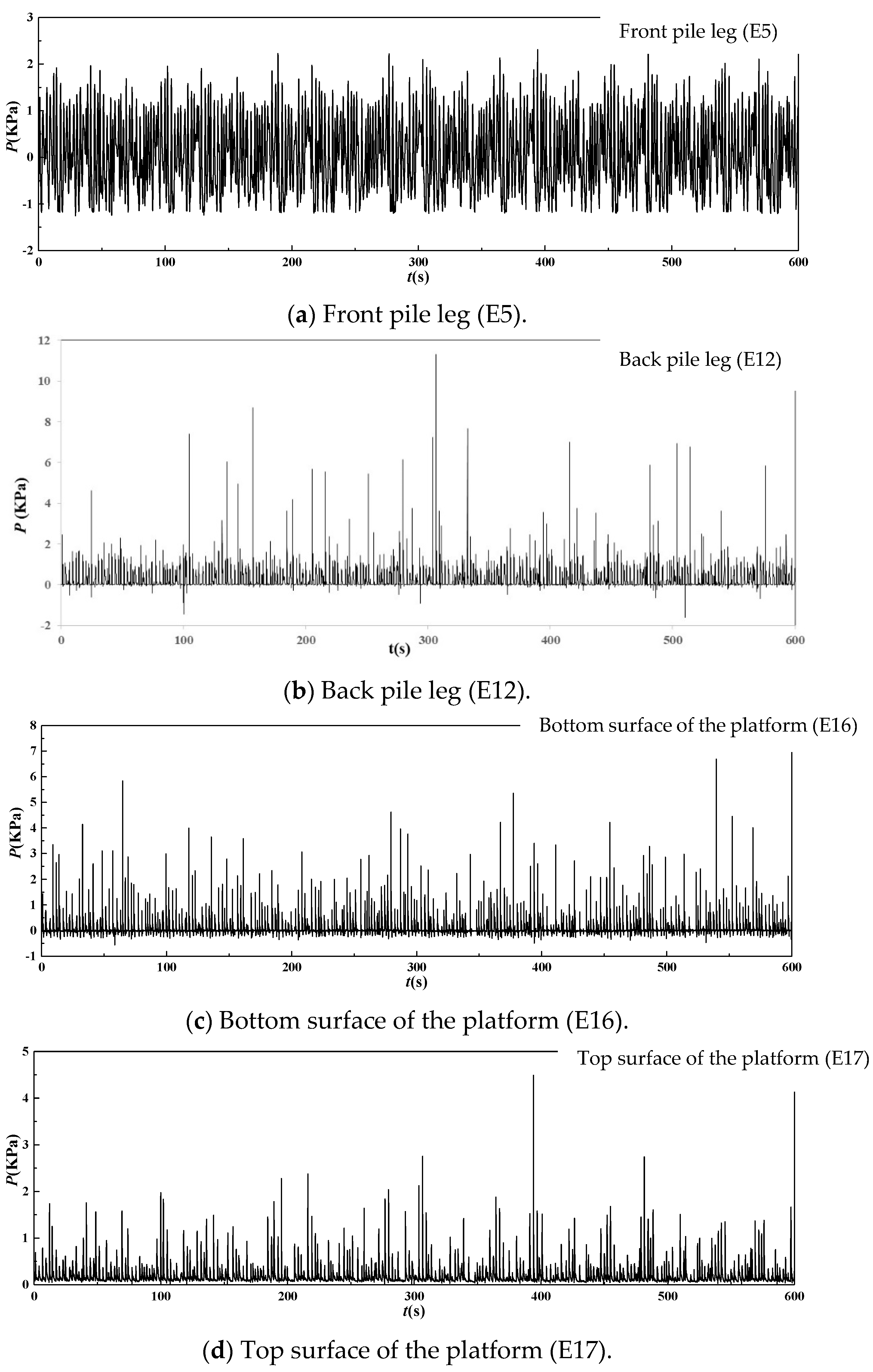
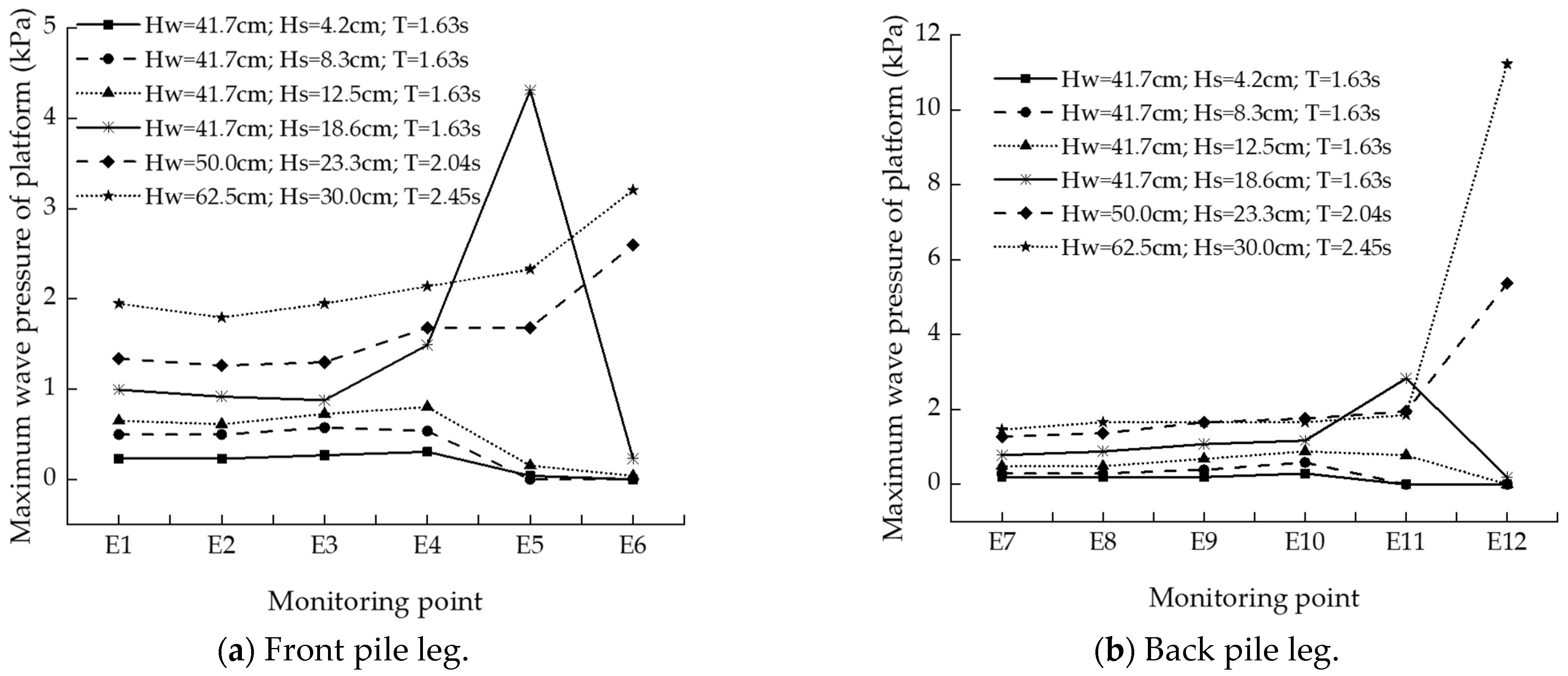
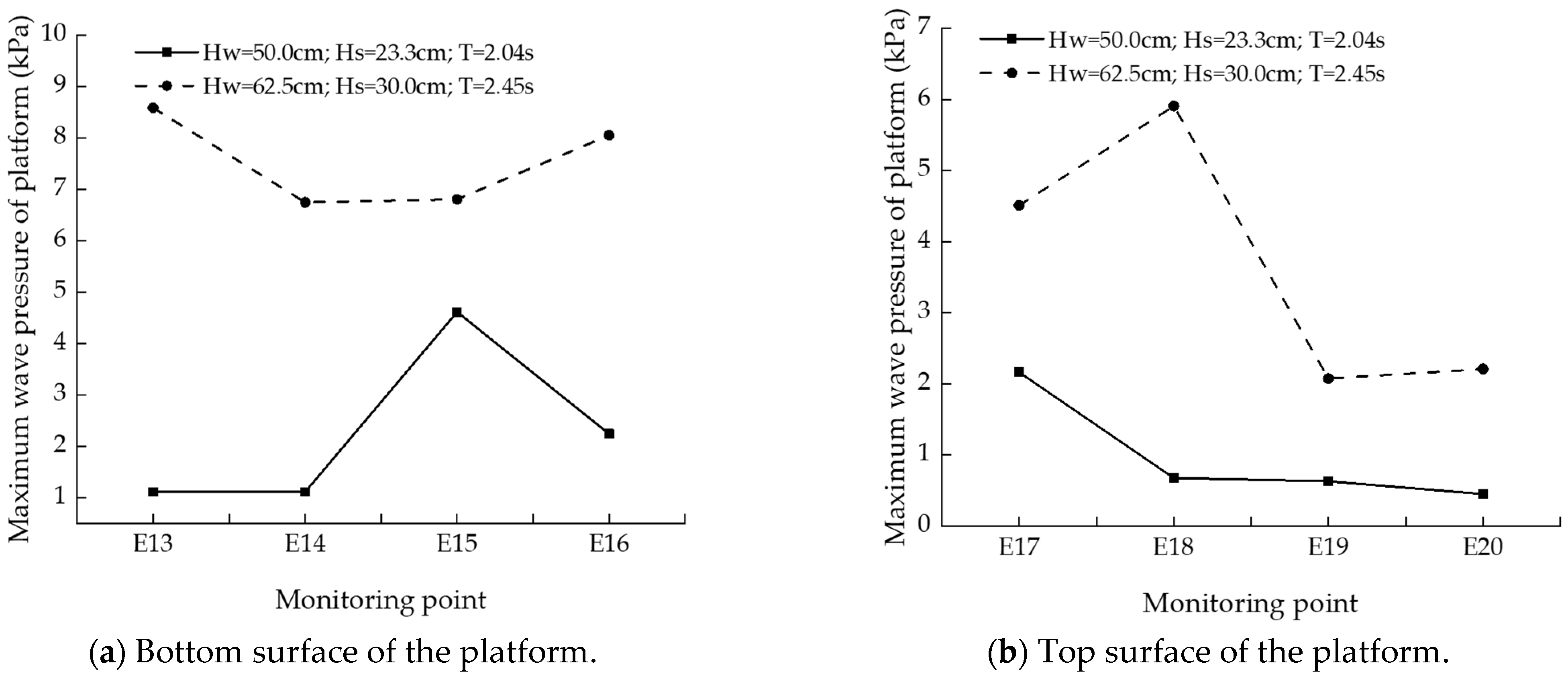
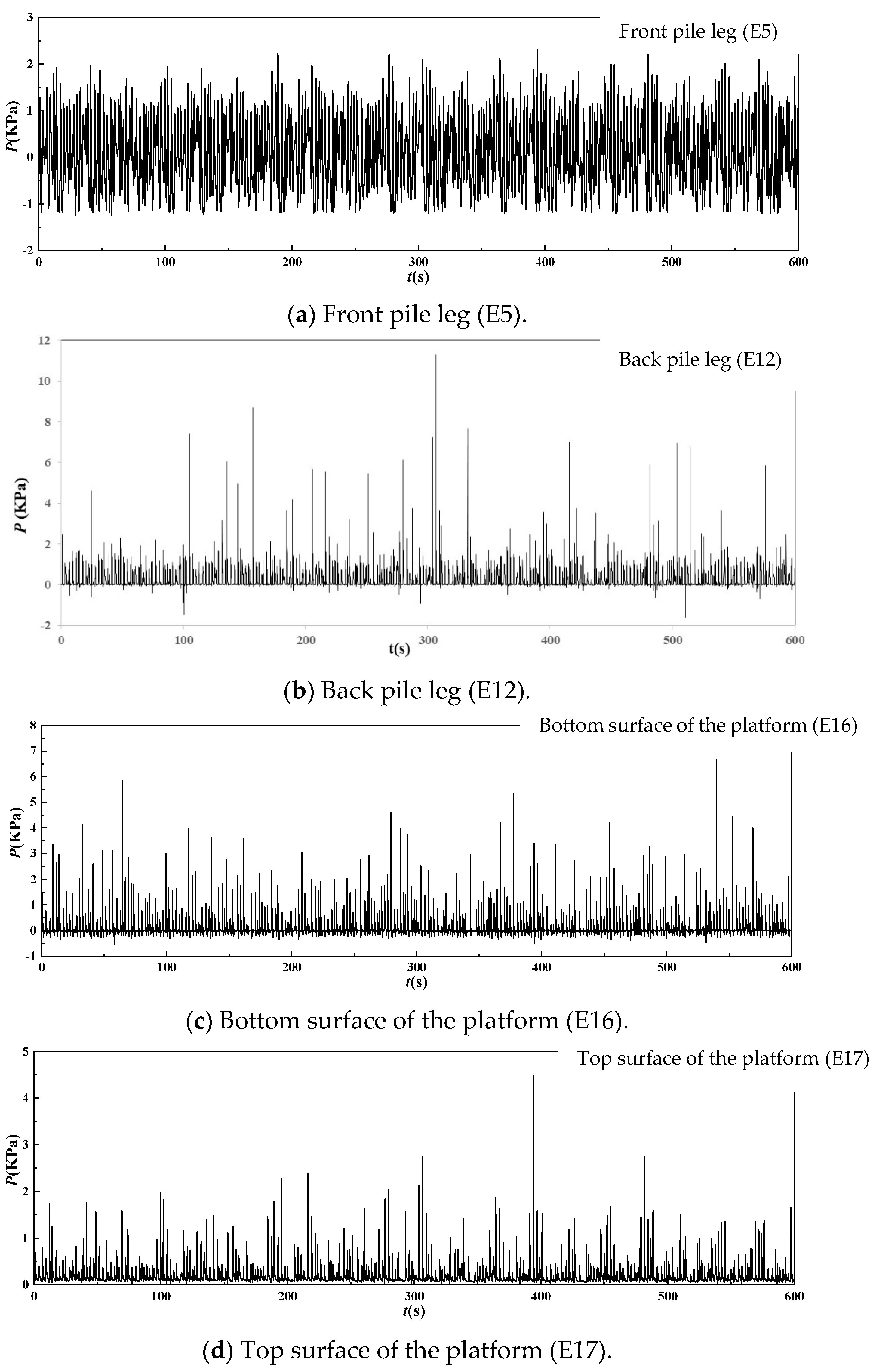
3.1.1. Wave Pressure
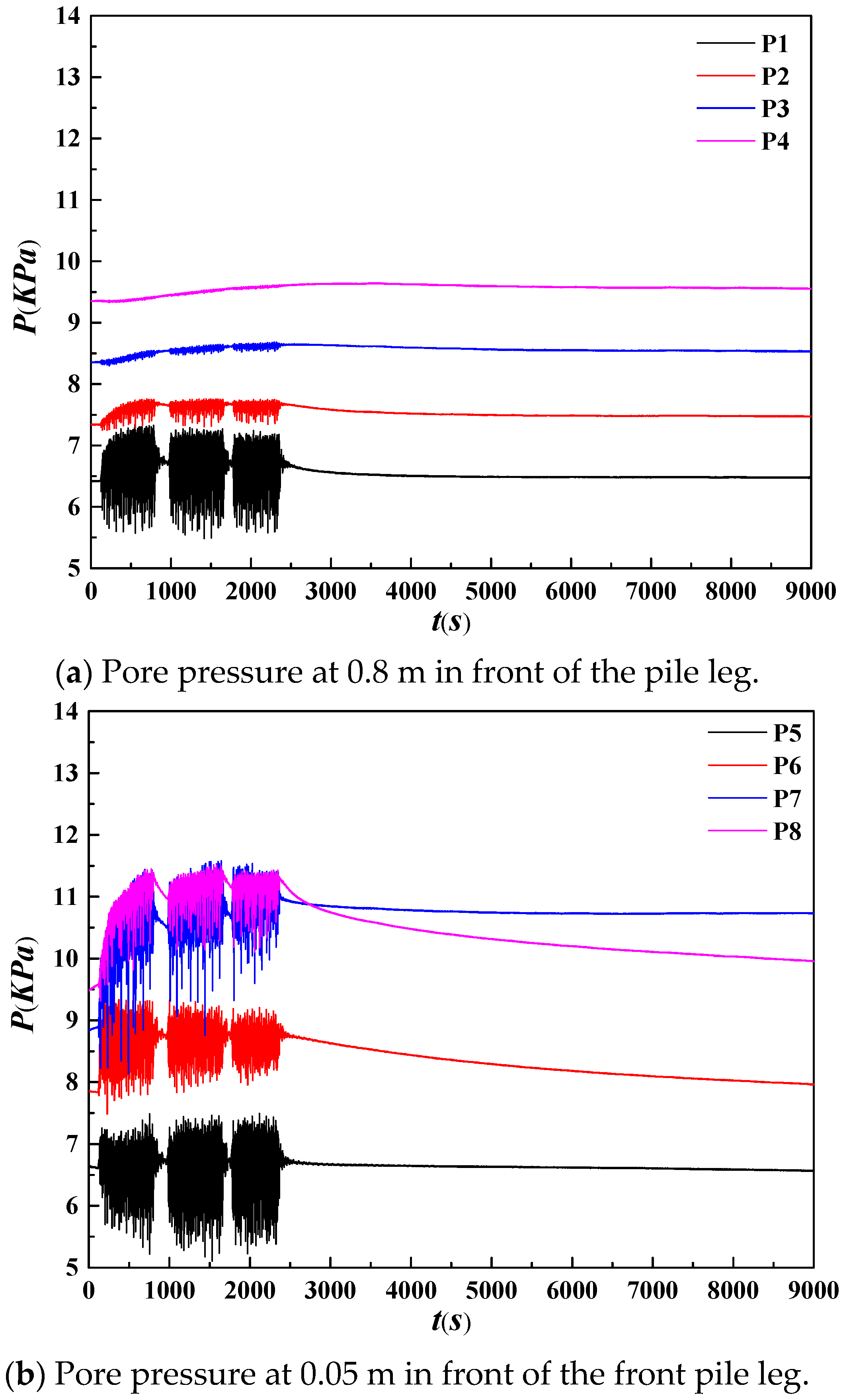
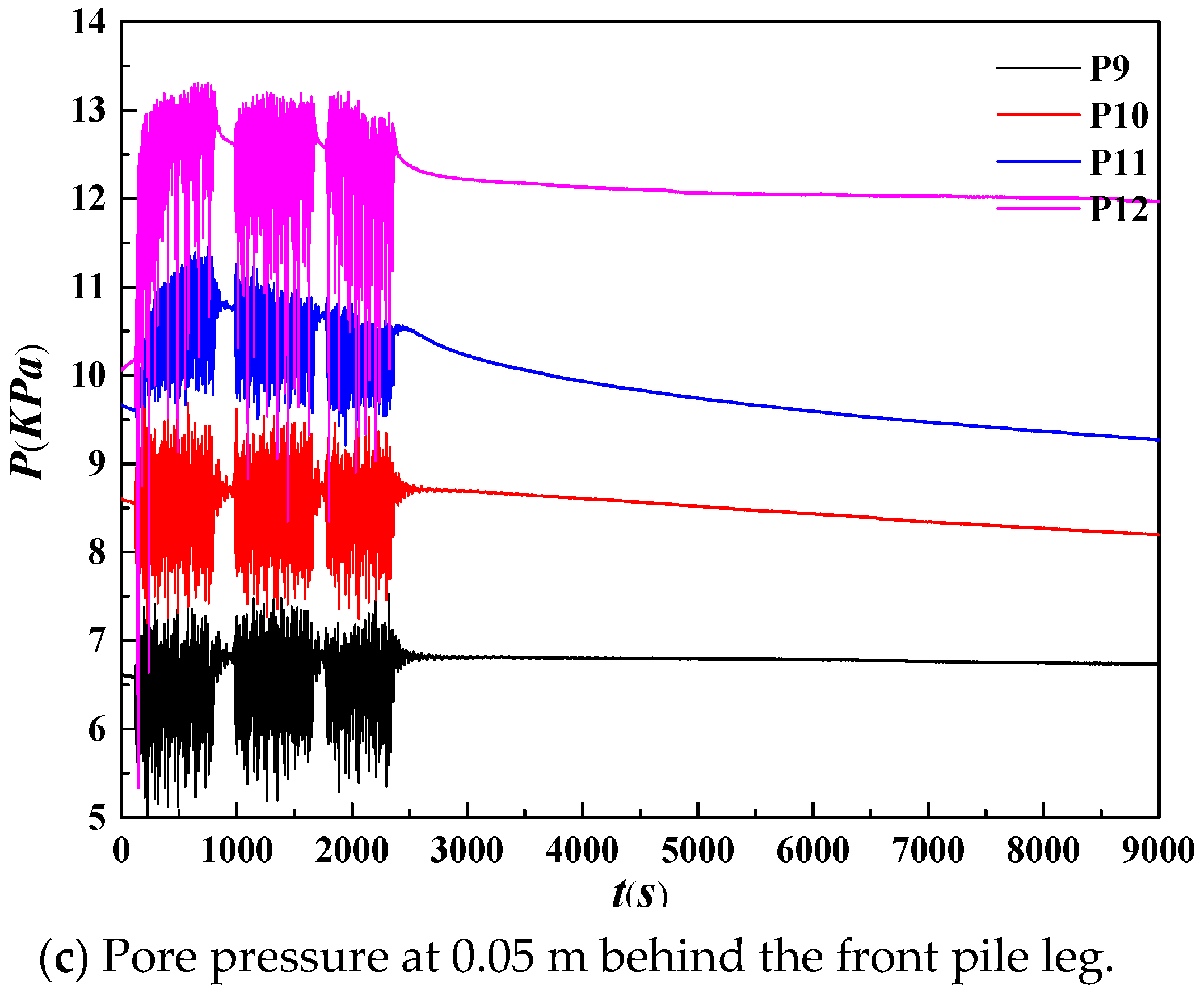
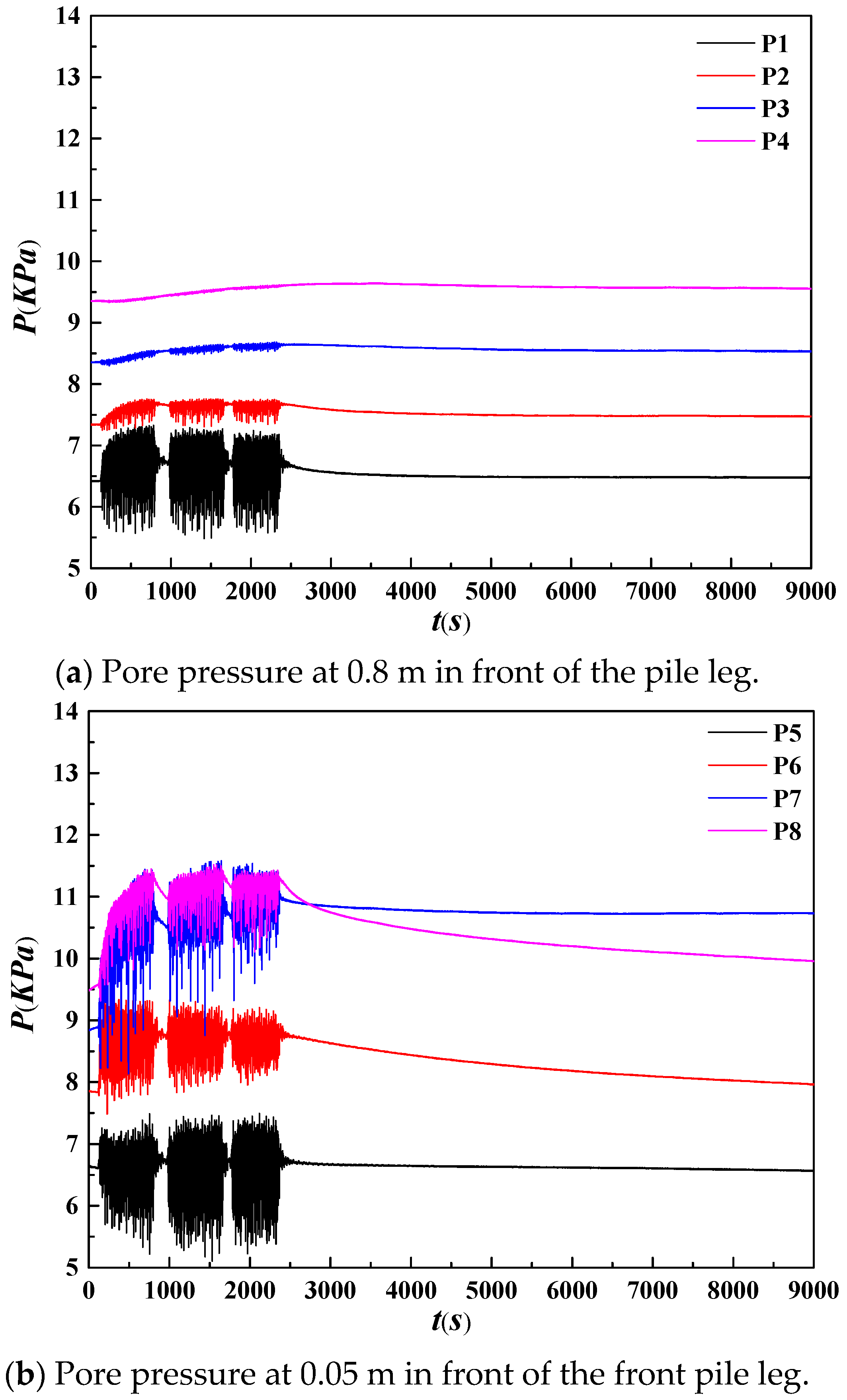
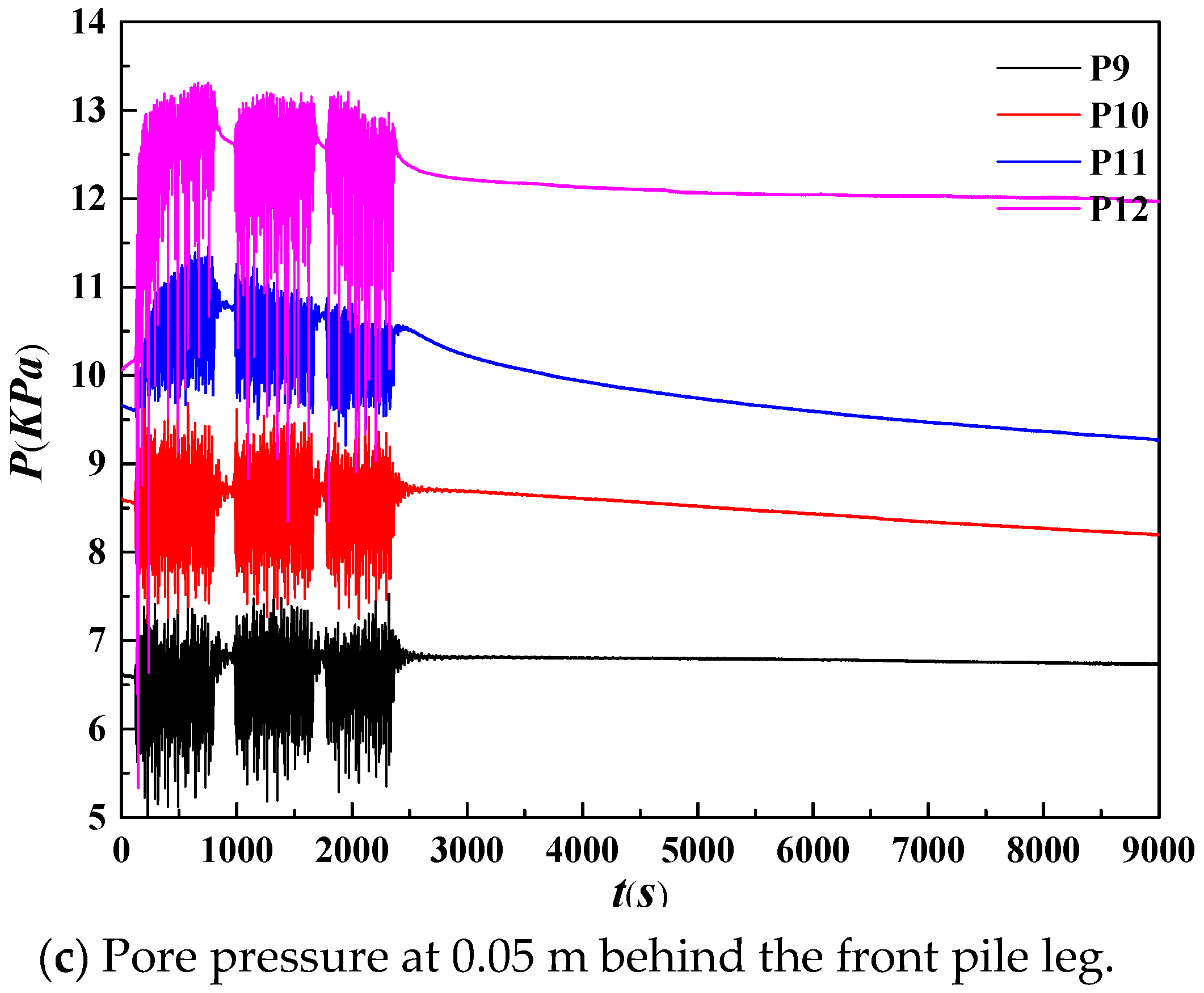
3.1.2. Pore Pressure
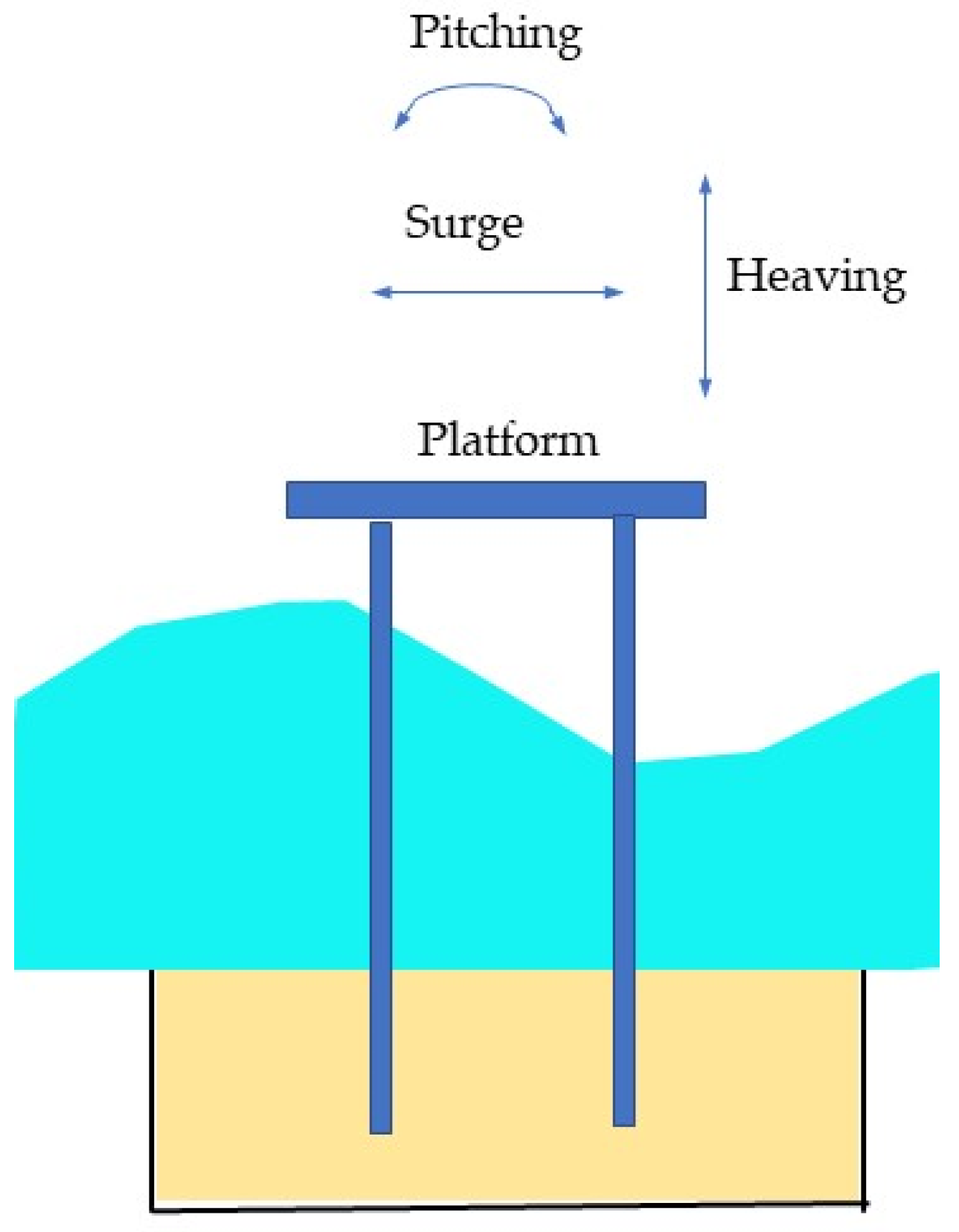
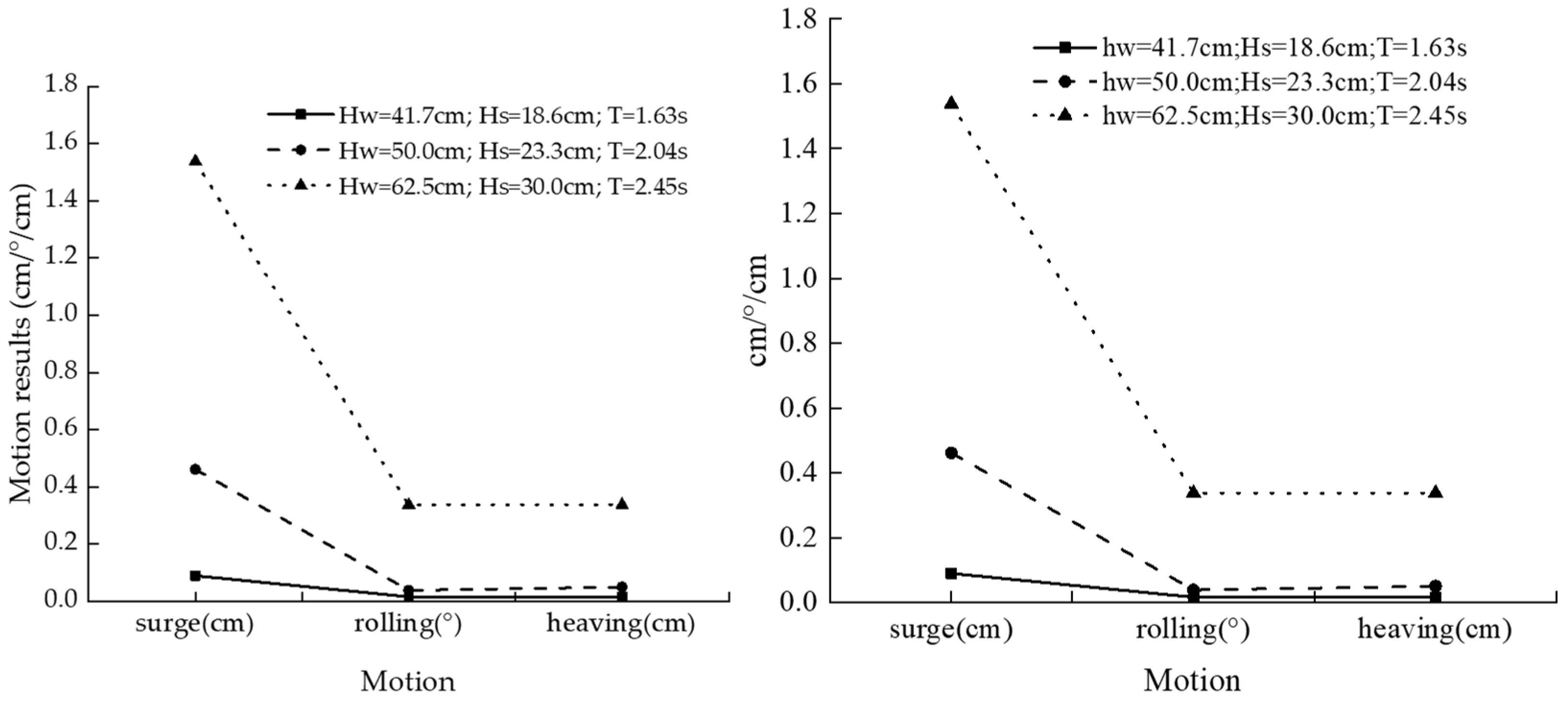
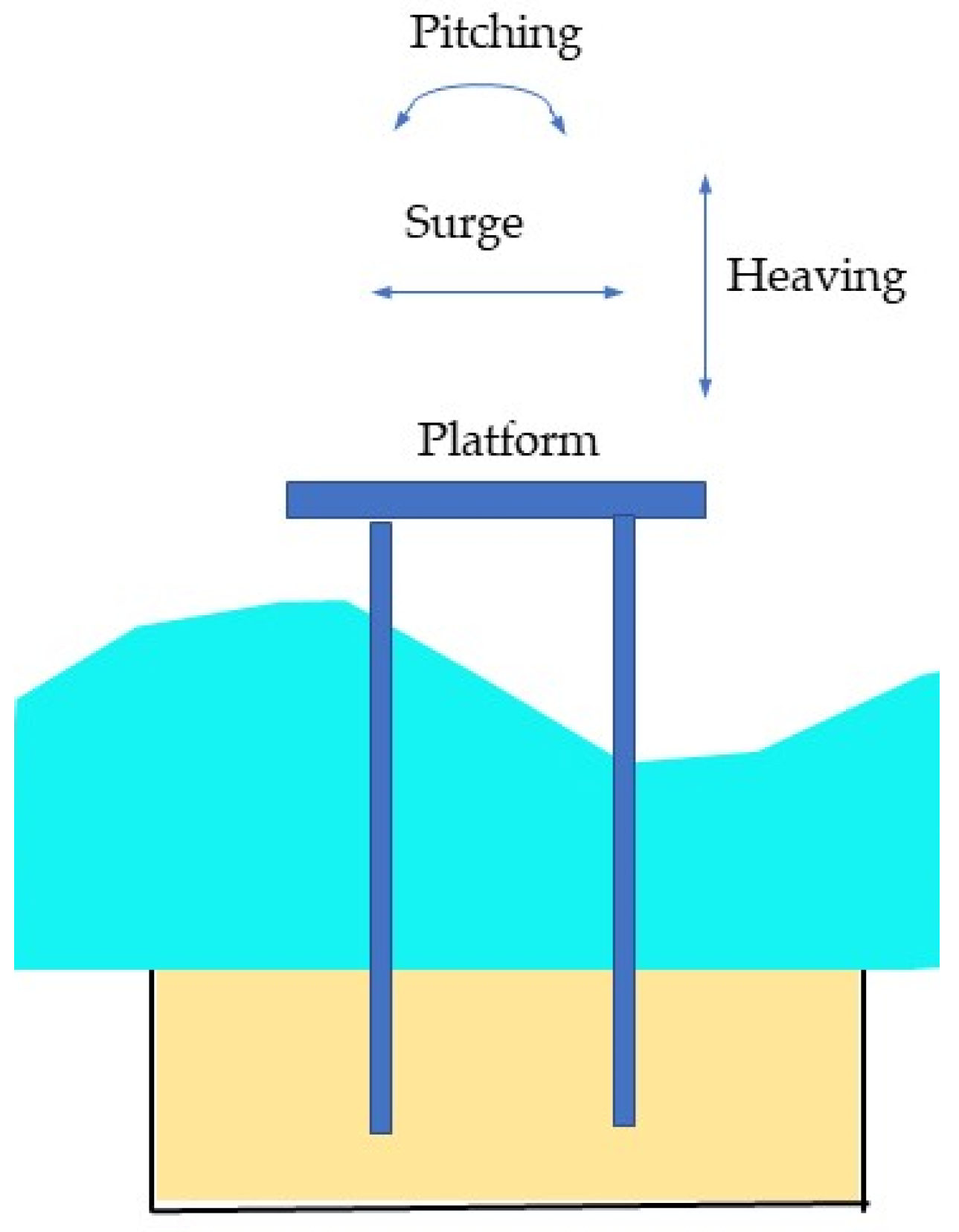
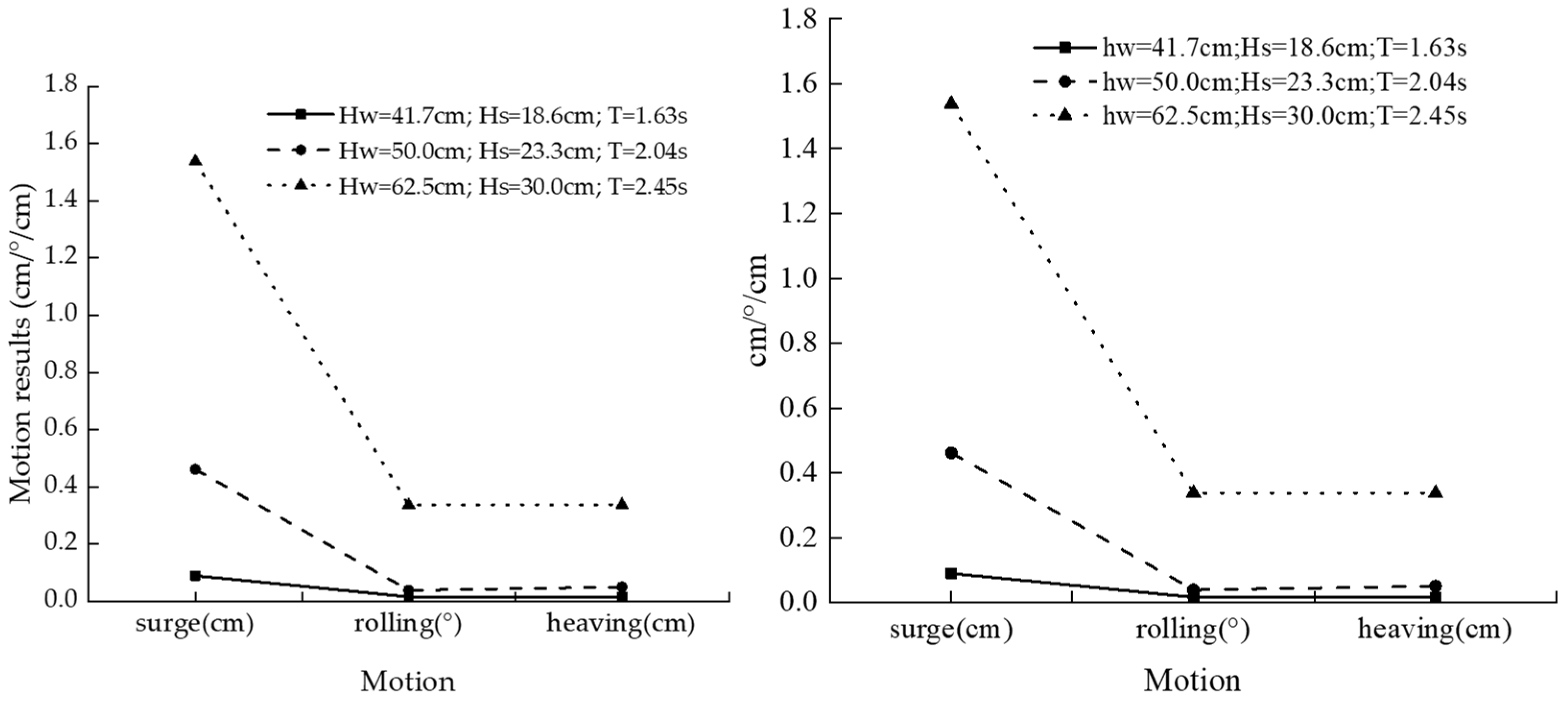
3.1.3. Motion Response
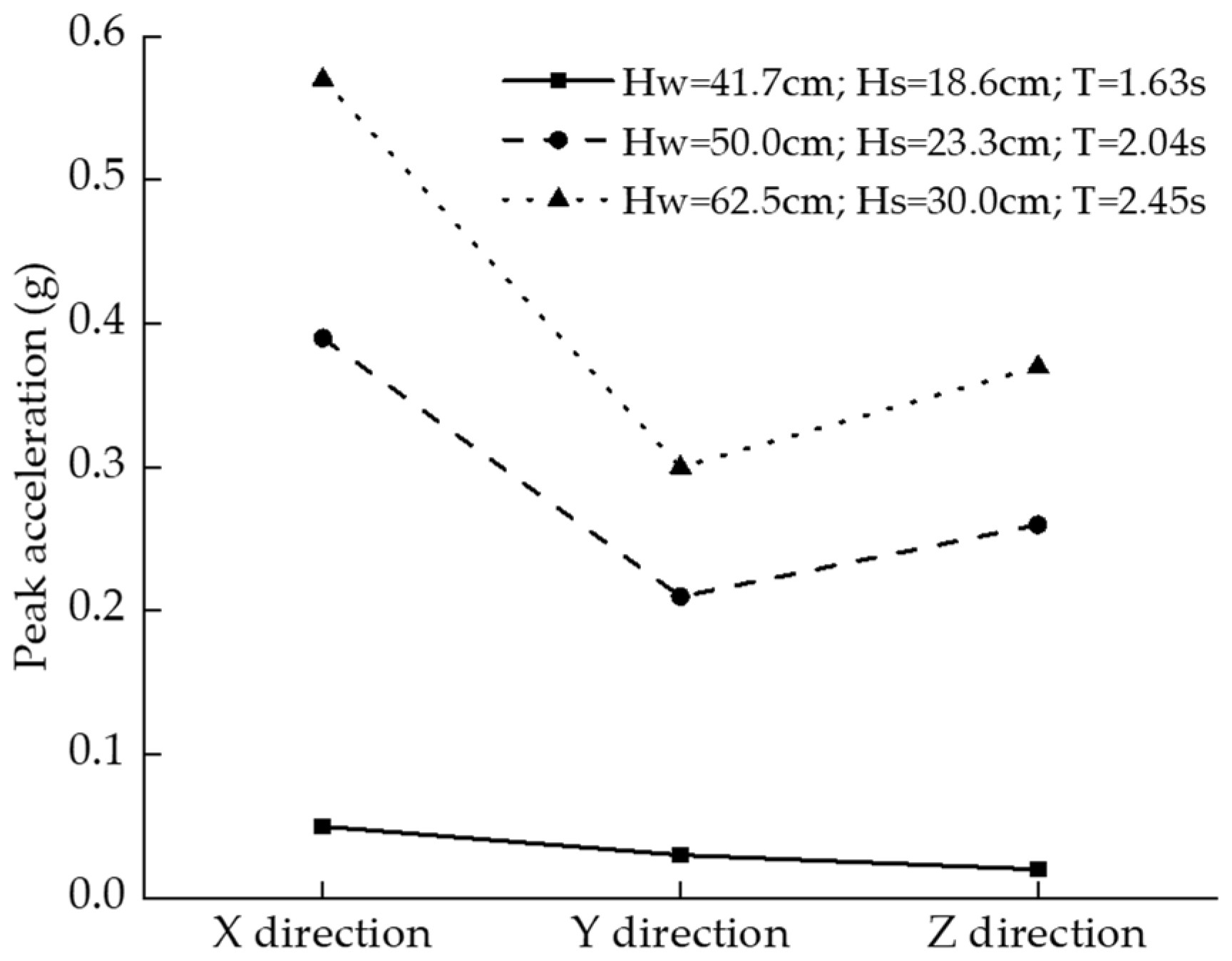
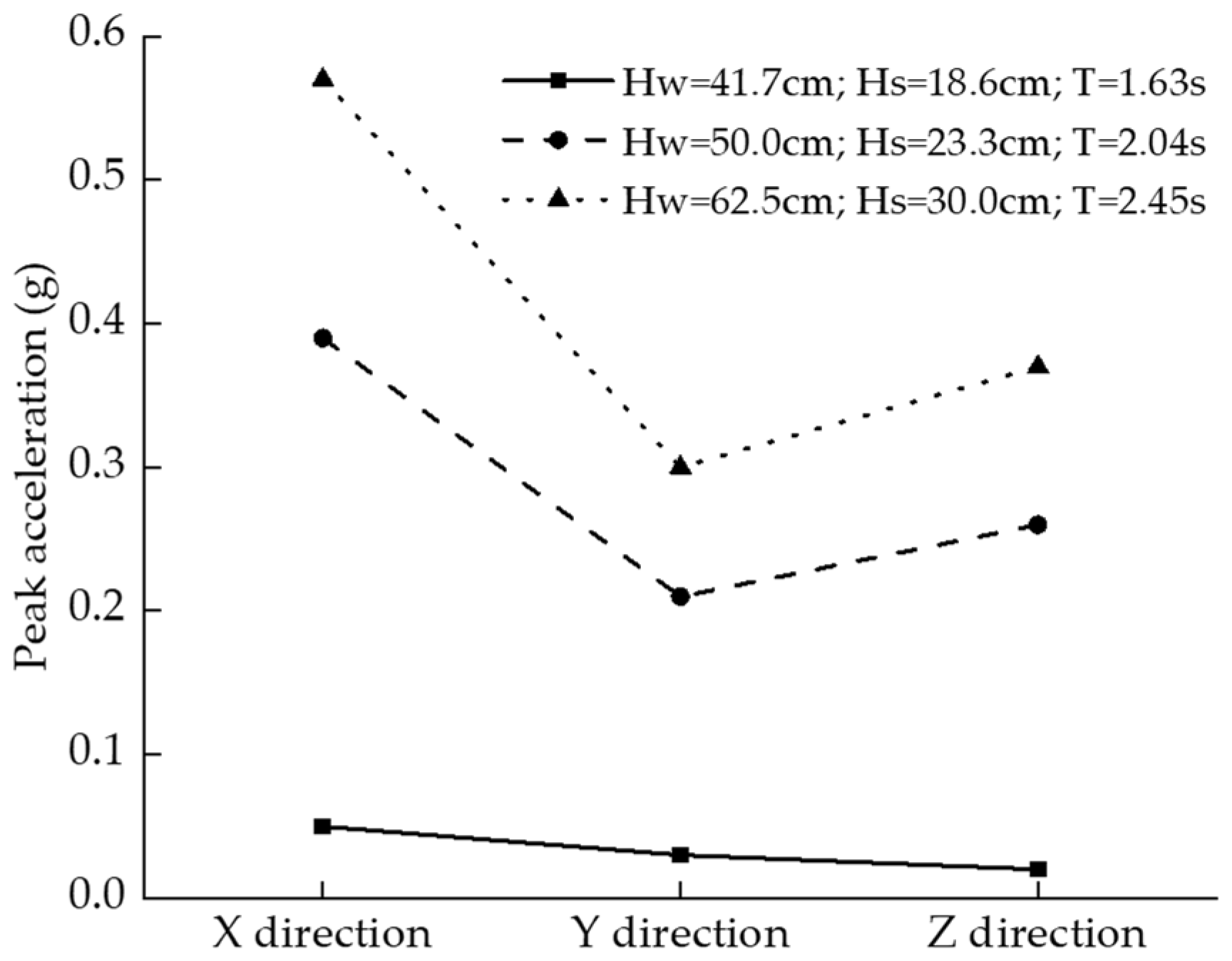
3.1.4. Acceleration
3.1.5. Analysis of Structural Stationary State
3.2. Simulation Test Results of the Coupling Effect of the Offshore Platform, Tower, and Seabed under Wave Impacts
3.2.1. Dynamic Characteristics of Towers
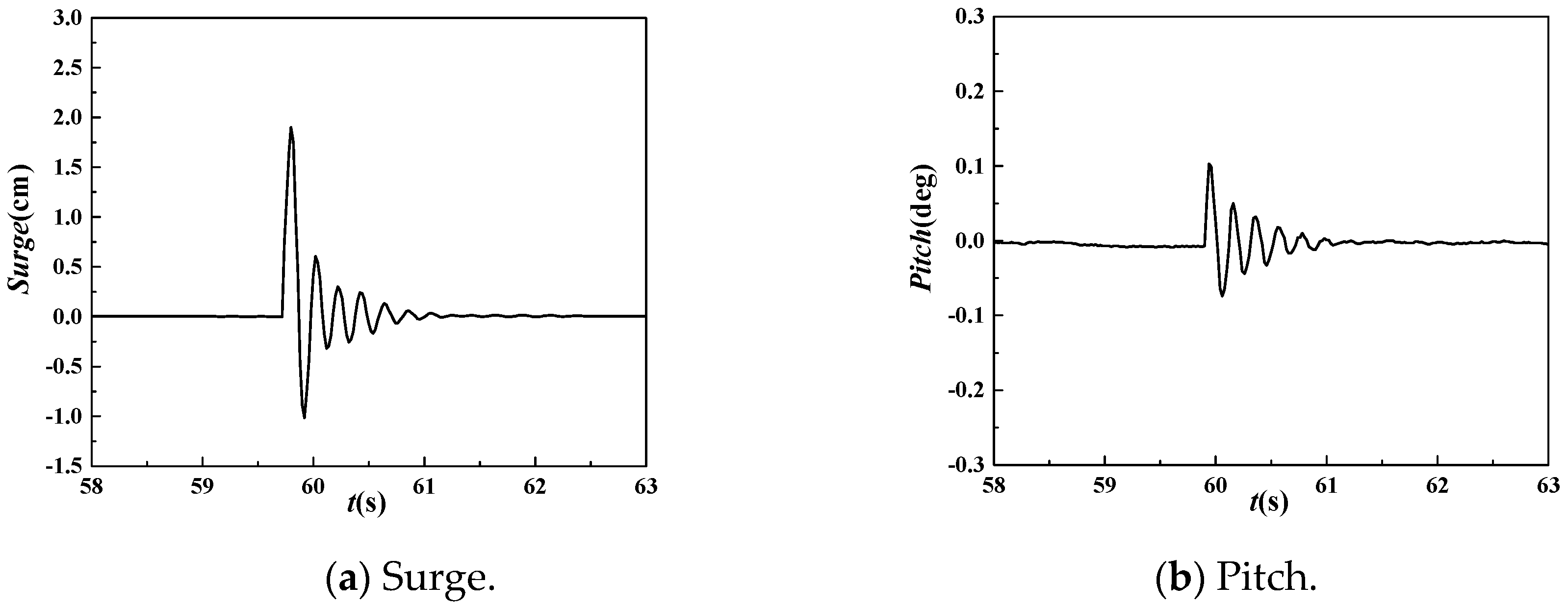
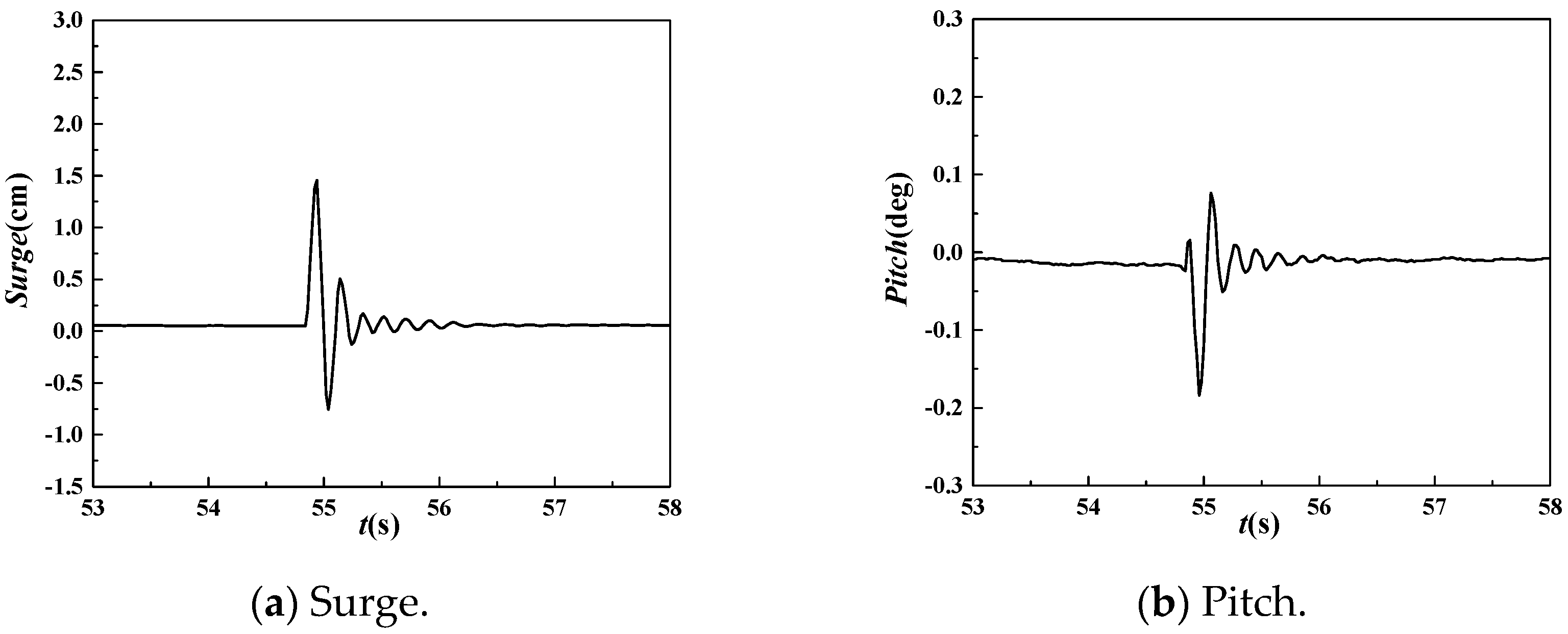
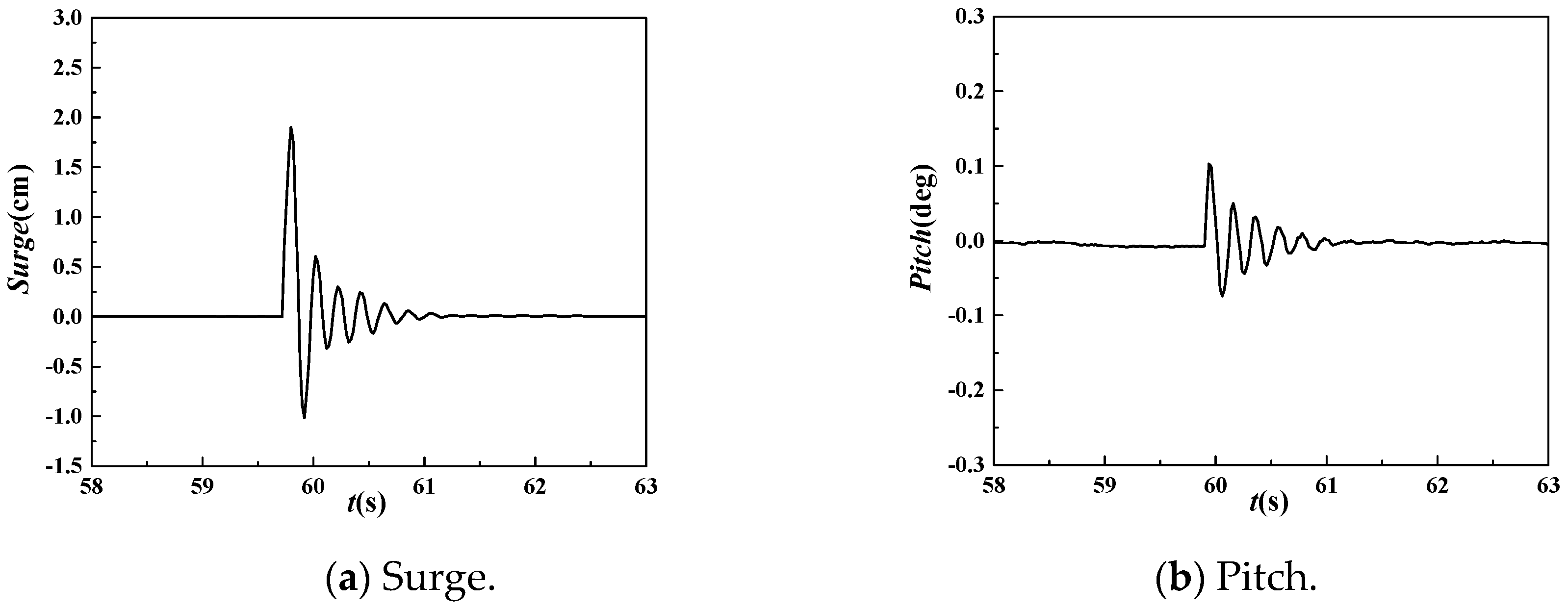
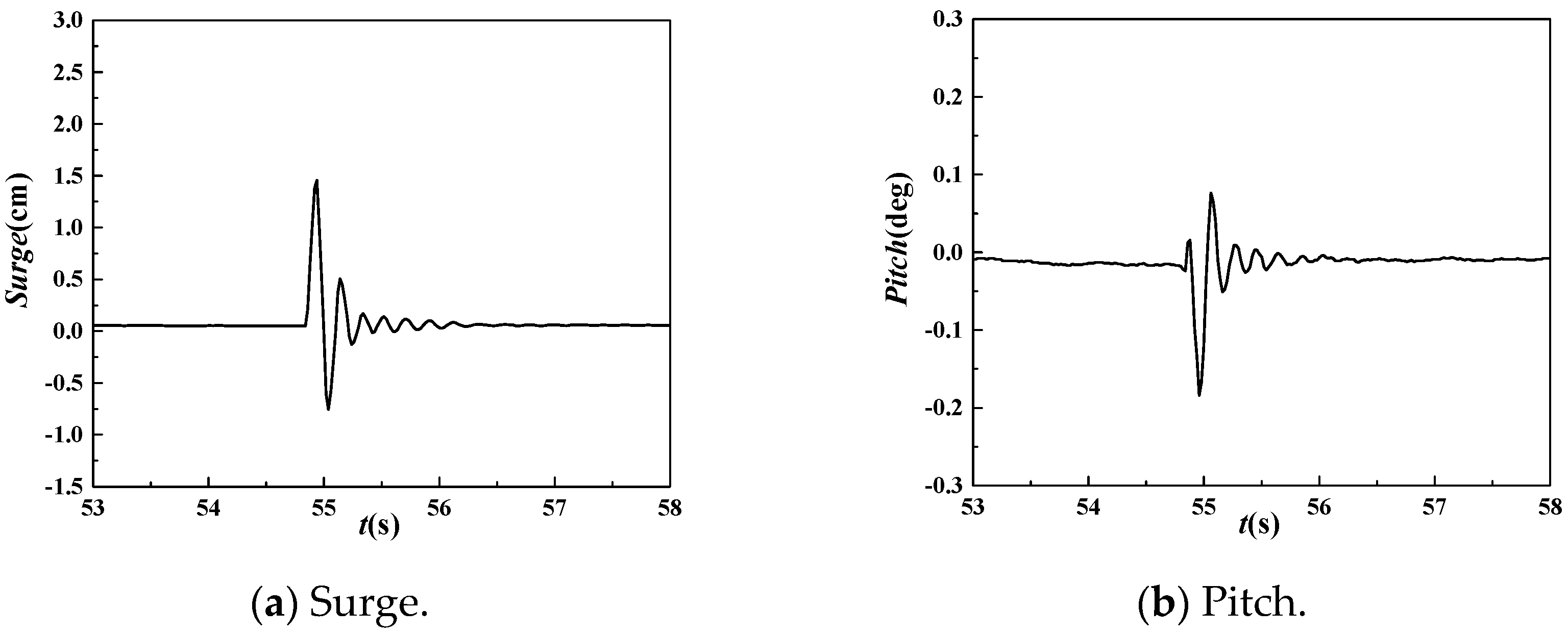
3.2.2. The Motion of the Towers
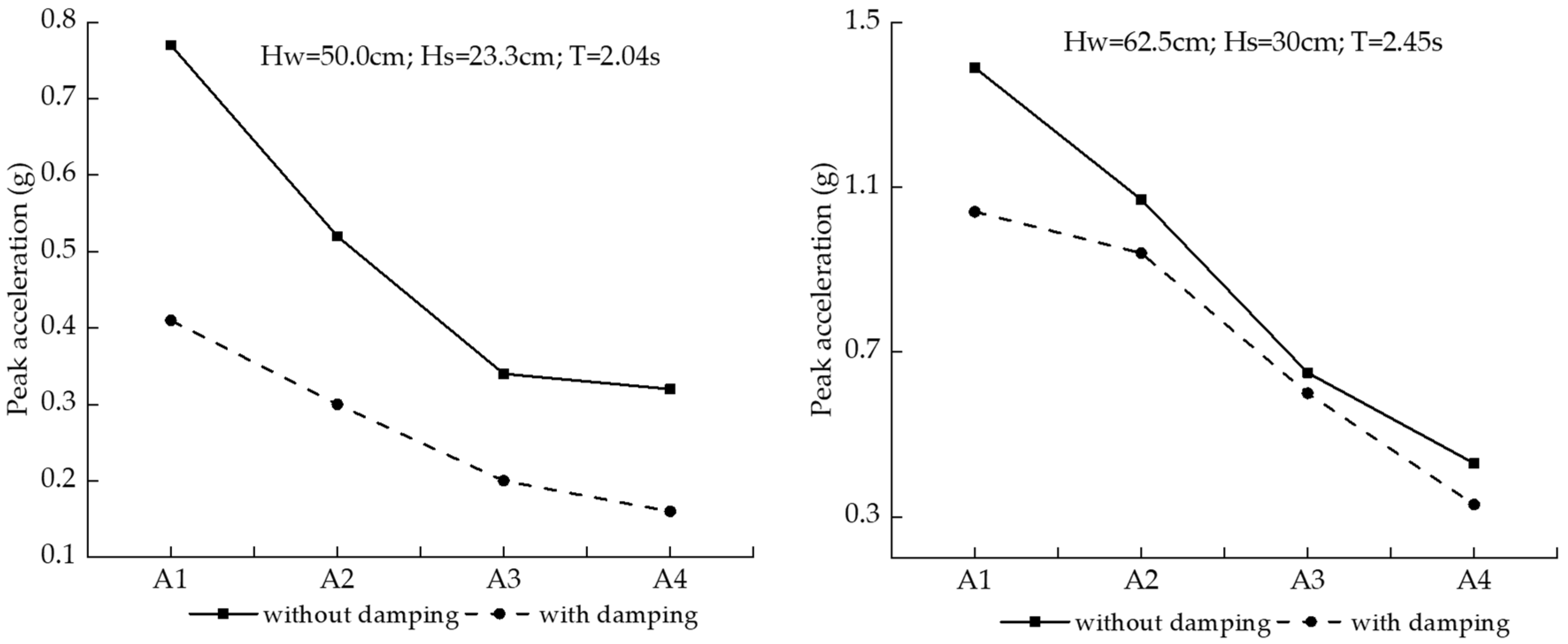
3.2.3. Acceleration of the Towers
4. Discussion
4.1. Stability Control of Jackup Offshore Platforms under Waves of Large Wave Height
4.2. Coupling Effect between the Jackup Offshore Platform, the Tower, and the Seabed Foundation
4.3. The Vibration Control of the Tower on the Offshore Platform
5. Conclusions
- (1)
- The wave pressures on the platform structure increase more under waves of large wave height than under normal conditions, and they also increase with the increase in wave height. When the wave height is large enough, the wave is blocked by the platform surface and the water body gathers under the platform surface, causing a pile group effect. The pressure on the platform’s back pile legs is greater than that on the front pile legs.
- (2)
- Due to the reciprocating movement of the structures under waves of large wave height, the soil near the pile legs squeezes the foundation bed in front of and behind the pile legs, causing the pore pressure of the foundation bed near the pile legs to increase cumulatively, and causing local softening of the foundation, which is manifested in the soil near the pile legs becoming soft, and the structure undergoes a certain displacement, revealing the mechanism of instability of the offshore platform’s pile foundation under waves of large wave height.
- (3)
- The platform produces longitudinal movement (along the propagation direction of wave) under normal conditions, and the longitudinal movement of the platform increases under waves of large wave height, accompanied by the vortex-induced vibration of the platform in the lateral direction of the pile legs.
- (4)
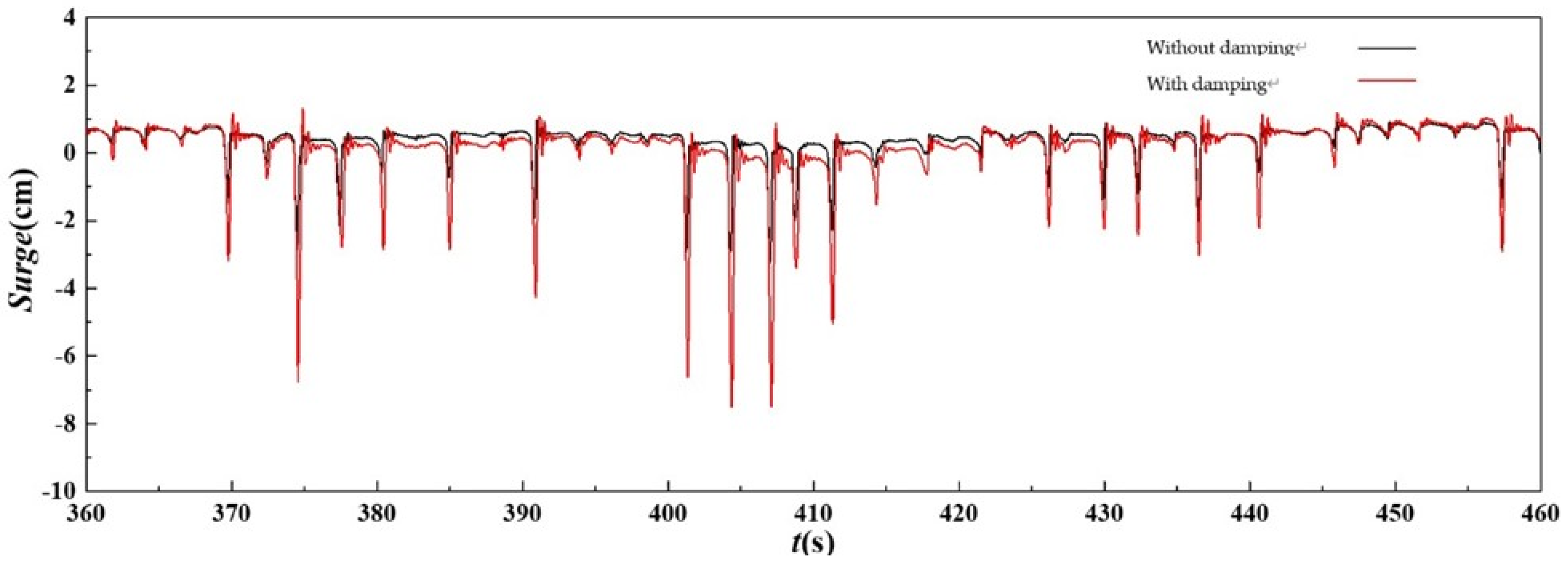
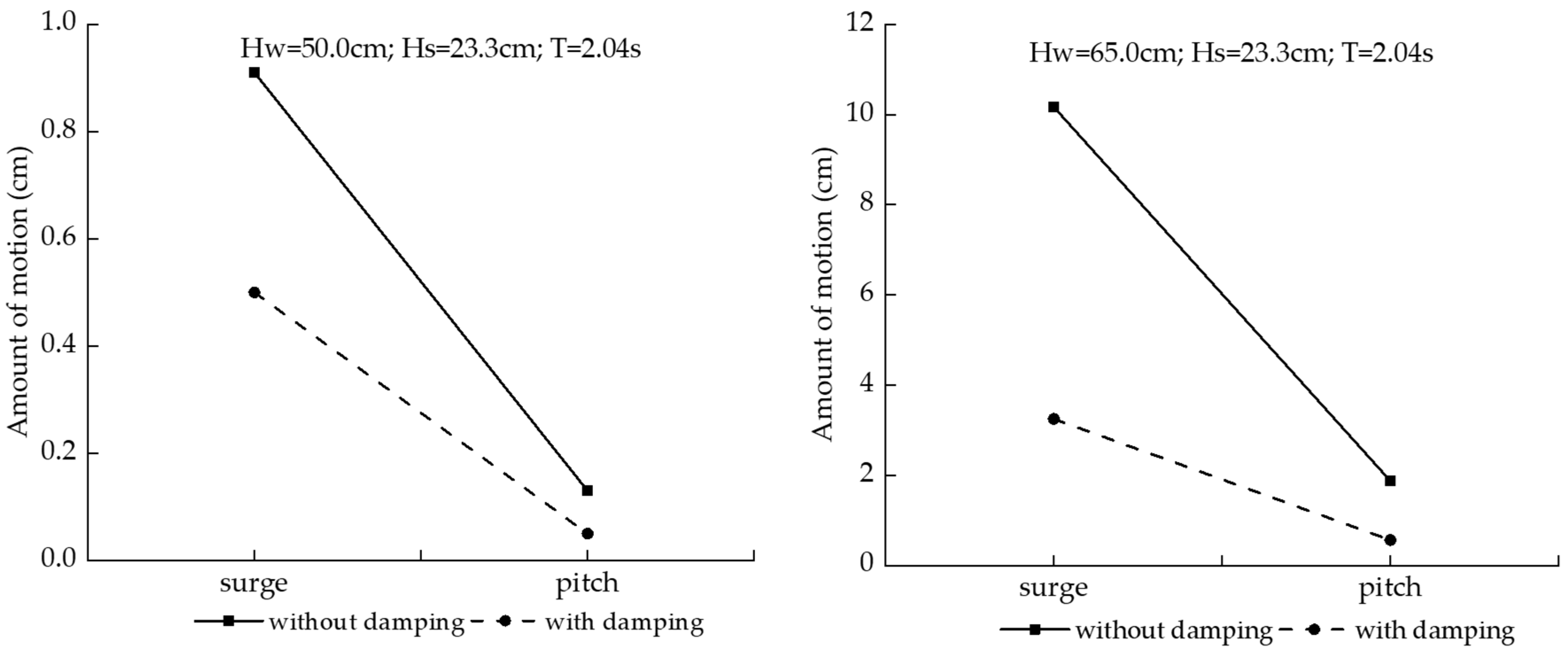
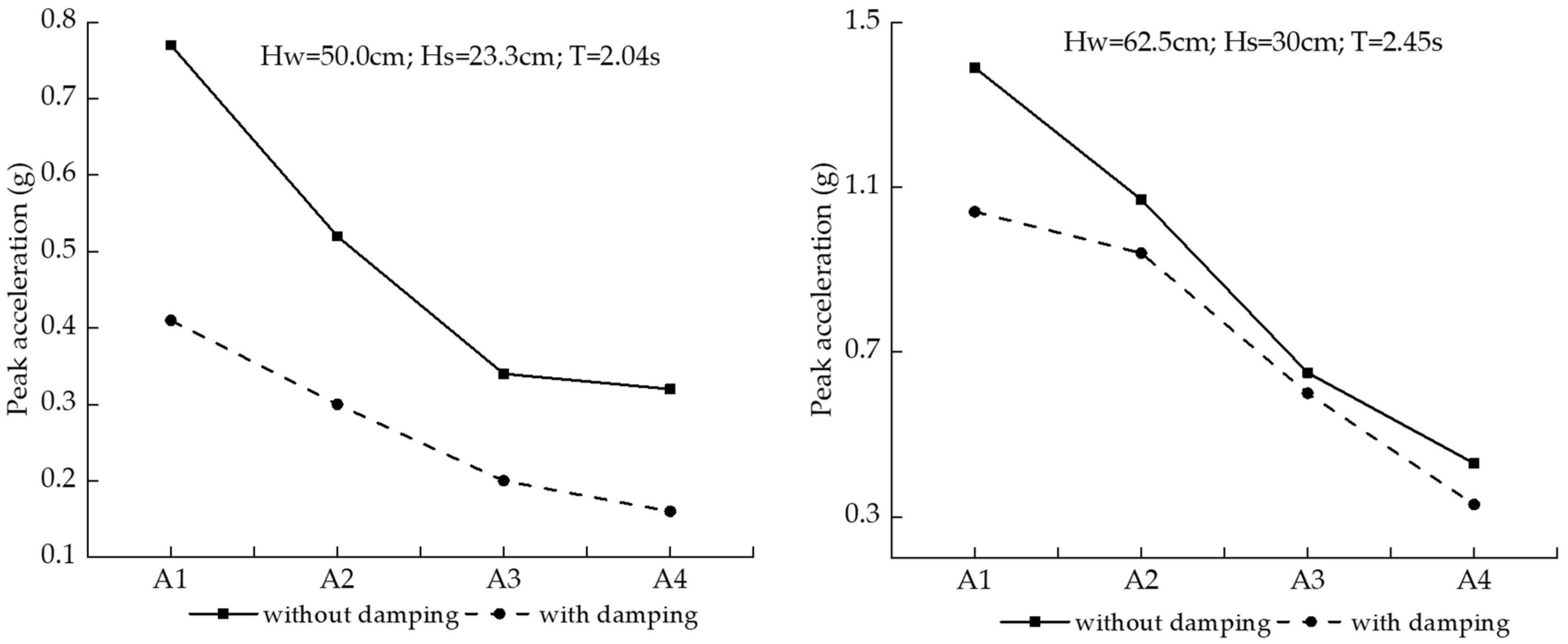
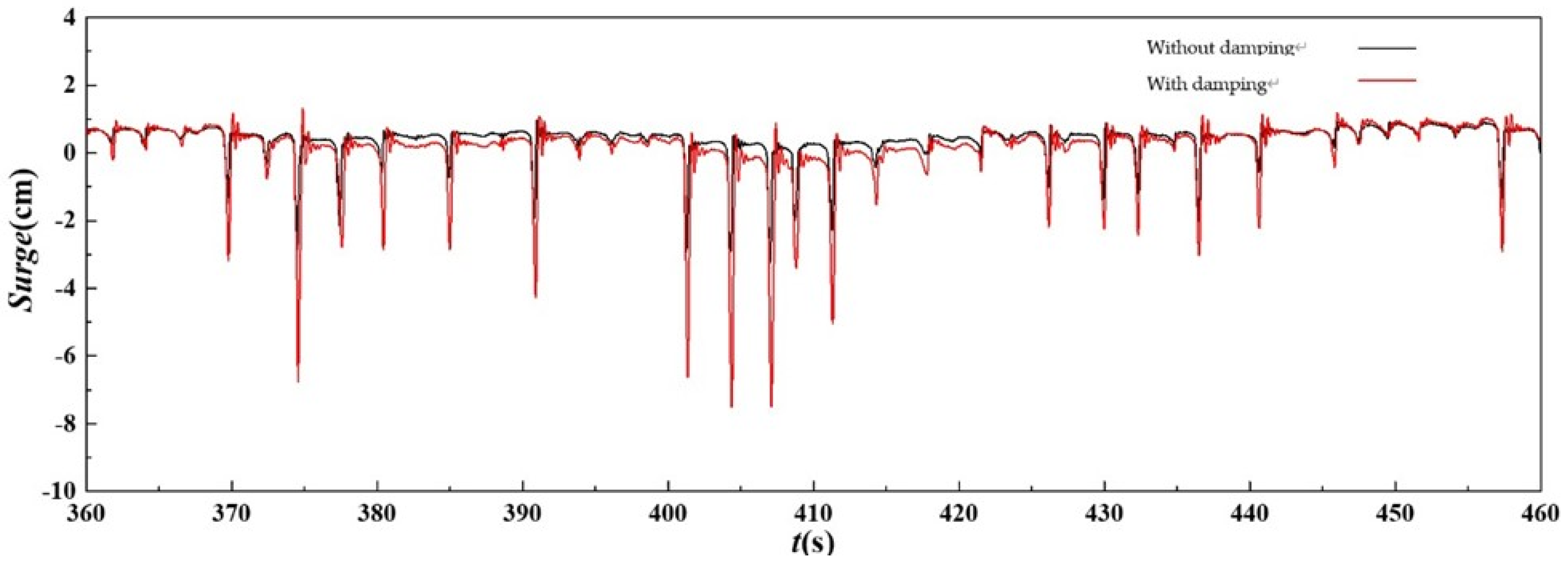
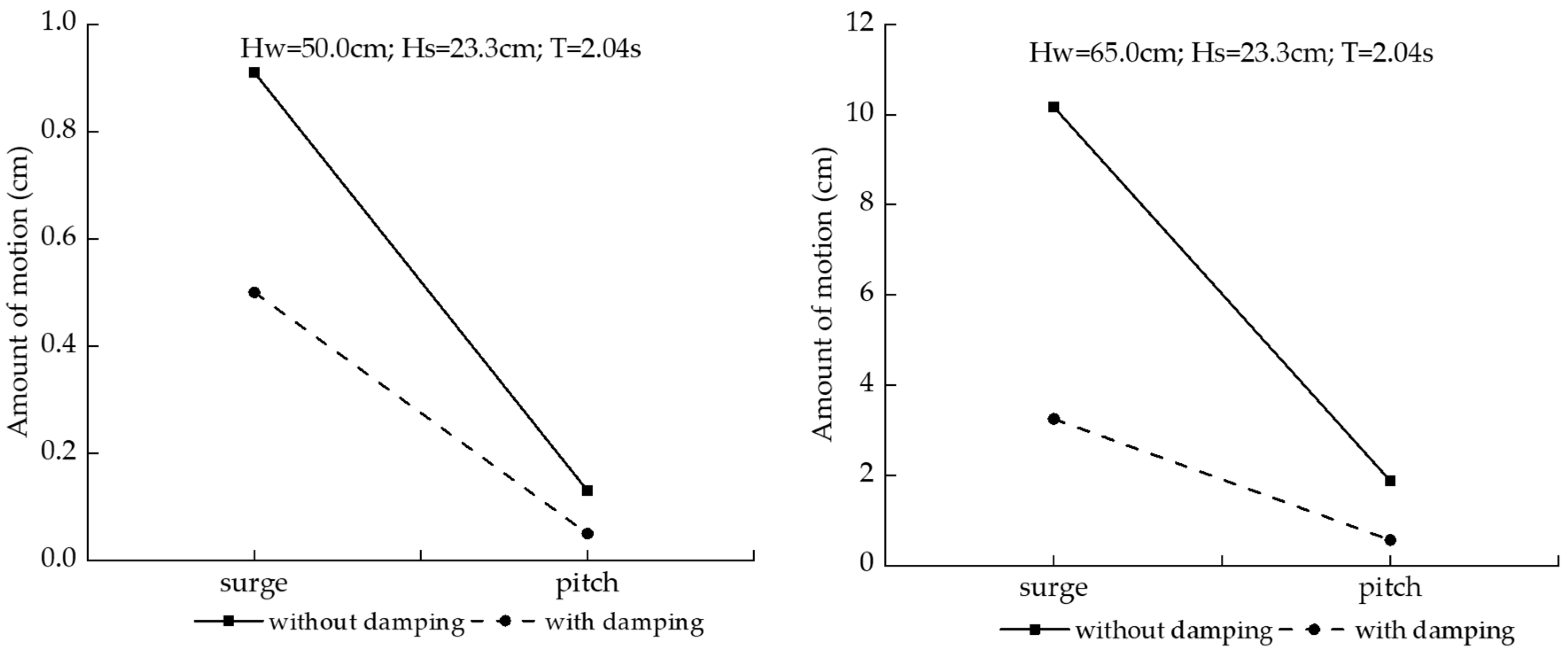
- The motion response of the tower structure is significantly greater than that of the platform structure, and a damping device has an obvious impact on the dynamic response characteristics of the tower. The maximum longitudinal movement of the tower without the damping device is 3.13 times that of the tower with the damping device under waves of large wave height.
- (5)
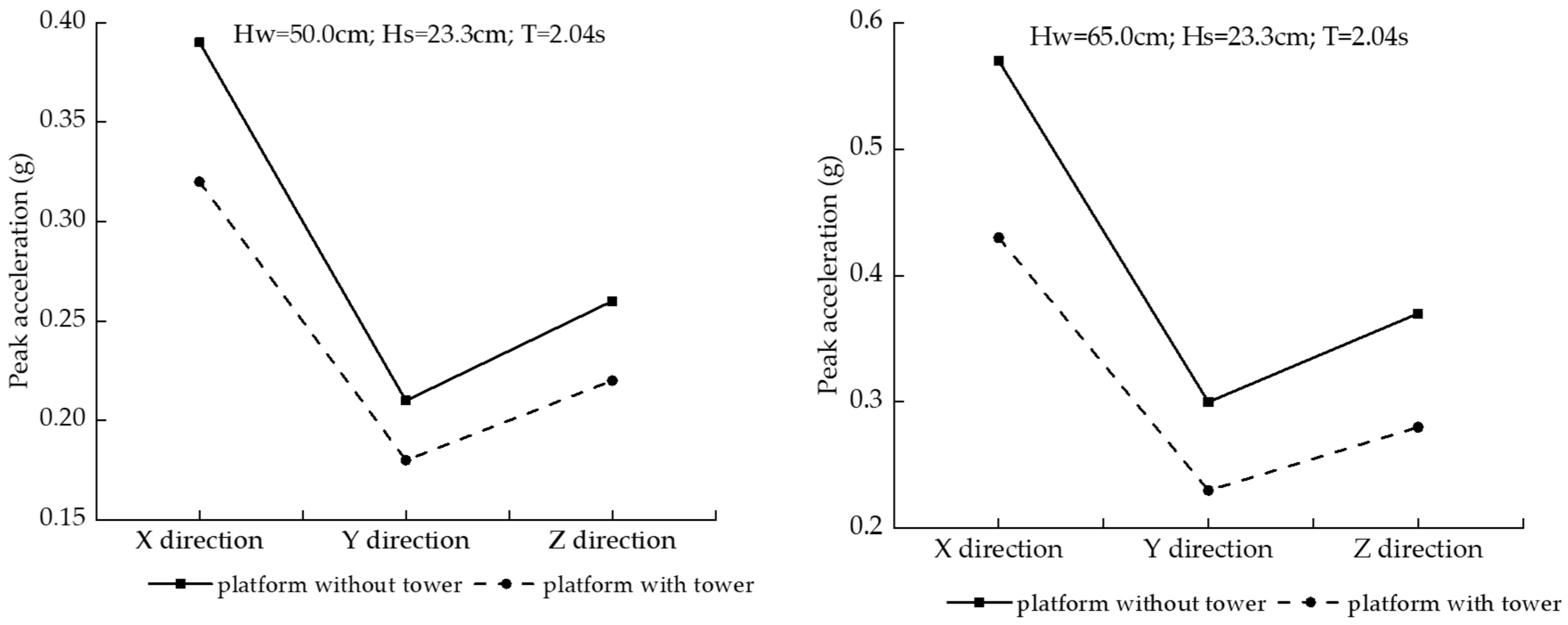
- Under the action of waves, a coupling vibration effect will occur between the tower and the platform, and the installation of the tower can play a certain role in mitigating the vibration of the platform itself.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Amaechi, C.V.; Reda, A.; Butler, H.O.; Ja’e, I.A.; An, C. Review on Fixed and Floating Offshore Structures. Part I: Types of Platforms with Some Applications. J. Mar. Sci. Eng. 2022, 10, 1074. [Google Scholar] [CrossRef]
- Bea, R.G.; Xu, T.; Stear, J.; Ramos, R. Wave Forces on Decks of Offshore Platforms. J. Waterw. Port Coast. Ocean Eng. 1999, 125, 136–144. [Google Scholar] [CrossRef]
- Istrati, D.; Buckle, I. Role of trapped air on the tsunami-induced transient loads and response of coastal bridges. Geosciences 2019, 9, 191. [Google Scholar] [CrossRef] [Green Version]
- Istrati, D.; Buckle, I.; Lomonaco, P.; Yim, S. Deciphering the tsunami wave impact and associated connection forces in open-girder coastal bridges. J. Mar. Sci. Eng. 2018, 6, 148. [Google Scholar] [CrossRef] [Green Version]
- Mao, D.F.; Zhong, C.; Zhang, L.B.; Chu, G. Dynamic response of offshore jacket platform including foundation degradation under cyclic loadings. Ocean Eng. 2015, 100, 35–45. [Google Scholar] [CrossRef]
- Sunder, S.S.; Connor, J.J. Sensitivity analyses for steel jacket offshore platforms. Appl. Ocean Res. 1981, 3, 13–26. [Google Scholar] [CrossRef]
- Mostafa, Y.E.; Naggar, M.H.E. Response of fixed offshore platforms to wave and current loading including soil–structure interaction. Soil Dyn. Earthq. Eng. 2004, 24, 357–368. [Google Scholar] [CrossRef]
- Elshafey, A.A.; Haddara, M.R.; Marzouk, H. Dynamic response of offshore jacket structures under random loads. Mar. Struct. 2009, 22, 504–521. [Google Scholar] [CrossRef]
- Golafshani, A.A.; Ebrahimian, H.; Bagheri, V.; Holmas, T. Assessment of offshore platforms under extreme waves by probabilistic incremental wave analysis. J. Constr. Steel Res. 2011, 67, 759–769. [Google Scholar] [CrossRef]
- Hezarjaribi, M.; Bahaari, M.R.; Bagheri, V.; Ebrahimian, H. Sensitivity analysis of jacket-type offshore platforms under extreme waves. J. Constr. Steel Res. 2013, 83, 147–155. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhou, X.L.; Wang, J.H.; Guo, J.J. Wave-induced seabed response around an offshore pile foundation platform. Ocean Eng. 2017, 130, 567–582. [Google Scholar] [CrossRef]
- Zhang, D.L.; Bi, C.W.; Wu, G.Y.; Zhao, S.X.; Dong, G.H. Laboratory Experimental Investigation on the Hydrodynamic Responses of an Extra-Large Electrical Platform in Wave and Storm Conditions. Water 2019, 11, 2042. [Google Scholar] [CrossRef] [Green Version]
- Xie, Y.C.; Huang, J.T.; Li, X.K.; Tian, X.J.; Liu, G.J.; Leng, D.X. Experimental study on hydrodynamic characteristics of three truss-type legs of jack-up offshore platform. Ocean Eng. 2021, 234, 109305. [Google Scholar] [CrossRef]
- Liu, H.B.; Zhao, C.Y.; Jiang, Z.; Su, H.H.; Qu, X.Q. Numerical investigation of wave run-up and impact forces on large offshore jacket platforms. Ocean Eng. 2022, 266, 112539. [Google Scholar] [CrossRef]
- Luo, M.; Zhu, W.Q. Nonlinear stochastic optimal control of offshore platforms under wave loading. J. Sound Vib. 2006, 296, 734–745. [Google Scholar] [CrossRef]
- Ma, H.; Zhang, Y.; Wang, S.Q.; Xu, J.L.; Su, H. Rolling-optimized model predictive vibration controller for offshore platforms subjected to random waves and winds under uncertain sensing delay. Ocean Eng. 2022, 252, 111054. [Google Scholar] [CrossRef]
- Moharrami, M.; Tootkaboni, M. Reducing response of offshore platforms to wave loads using hydrodynamic buoyant mass dampers. Eng. Struct. 2014, 81, 162–174. [Google Scholar] [CrossRef]
- Enferadi, M.H.; Ghasemi, M.R.; Shabakhty, N. Wave-induced vibration control of offshore jacket platforms through SMA dampers. Appl. Ocean Res. 2019, 90, 101848. [Google Scholar] [CrossRef]
- Ghadimi, B.; Taghikhany, T. Dynamic response assessment of an offshore jacket platform with semi-active fuzzy-based controller: A case study. Ocean Eng. 2021, 238, 109747. [Google Scholar] [CrossRef]
- Li, X.J.; Gao, F.P.; Yang, B. Wave-induced pore pressure responses and soil liquefaction around pile foundation. Int. J. Offshore Polar Eng. 2011, 21, 233–239. [Google Scholar]
- Qi, W.G.; Gao, F.P. Equilibrium scour depth at offshore monopile foundation in combined waves and current. Sci. China-Technol. Sci. 2014, 57, 1030–1039. [Google Scholar] [CrossRef]
- Lin, Z.B.; Pokrajac, D.; Guo, Y.K.; Jeng, D.S.; Tang, T.; Rey, N.; Zheng, J.H.; Zhang, J.S. Investigation of nonlinear wave-induced seabed response around mono-pile foundation. Coast. Eng. 2017, 121, 197–211. [Google Scholar] [CrossRef] [Green Version]
- Jacobsen, N.G.; Fuhrman, D.R.; Fredsϕe, J. A wave generation toolbox for the open-source CFD library: Open Foam. Int. J. Numer. Methods Fluids 2012, 70, 1073–1088. [Google Scholar] [CrossRef]
- Jacobsen, N.G.; Gent, M.R.A.; Wolters, G. Numerical analysis of the interaction of irregular waves with two dimensional permeable coastal structures. Coast. Eng. 2015, 102, 13–29. [Google Scholar] [CrossRef]
- Tang, T.; Hededal, O.; Cardiff, P. On finite volume method implementation of poro-elasto-plasticity soil model. Int. J. Numer. Anal. Methods Geomech. 2015, 39, 1410–1430. [Google Scholar] [CrossRef]
- Tang, T.; Roenby, J.; Hededal, O. A coupled soil-pore fluid formulation for modeling soil liquefaction and cyclic mobility in seabed using the finite volume method. Adv. Civil. Environ. Mater. Res. 2012, 1000, 26–30. [Google Scholar]
- Tang, T. Modeling of Soil-Water-Structure Interaction. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, 2014. [Google Scholar]
- Yuan, Q.Y.; Liao, C.C.; Zhou, X.L. Experimental Study on the Distribution of Wave-Induced Excess Pore Pressure in a Sandy Seabed around a Mat Foundation. J. Mar. Sci. Eng. 2019, 7, 304. [Google Scholar] [CrossRef] [Green Version]
- Ye, J.H.; Jeng, D.S.; Wang, R.; Zhu, C.Q. A 3-D semi-coupled numerical model for fluid-structures-seabed-interaction (FSSI-CAS3D): Model and verification. J. Fluids Struct. 2013, 40, 148–162. [Google Scholar] [CrossRef]
- Ye, J.H.; Jeng, D.S.; Wang, R.; Zhu, C.Q. Validation of a 2-D semi-coupled numerical model for fluid-structure-seabed interaction. J. Fluids Struct. 2013, 42, 333–357. [Google Scholar] [CrossRef]
- Jeng, D.S.; Ye, J.H.; Zhang, J.S.; Liu, P.L.F. An integrated model for the wave-induced seabed response around marine structures: Model verifications and applications. Coast. Eng. 2013, 72, 1–19. [Google Scholar] [CrossRef]
- Ye, J.H.; Yu, D.W. ABAQUS–OlaFlow integrated numerical model for fluid-seabed-structure interaction. Mar. Struct. 2021, 78, 103016. [Google Scholar] [CrossRef]
- Ye, J.H.; Wang, G. Seismic dynamics of offshore breakwater on liquefiable seabed foundation. Soil Dyn. Earthq. Eng. 2015, 76, 86–99. [Google Scholar] [CrossRef]
- Ye, J.H.; He, K.P.; Zhou, L.J. Subsidence prediction of a rubble mound breakwater at Yantai port: A application of FSSI-CAS 2D. Ocean. Eng. 2021, 219, 108349. [Google Scholar] [CrossRef]
- Ye, H.L.; Yu, D.; Ye, J.H.; Yang, Z.F. Numerical Analysis of Dynamics ofJack-Up Offshore Platform and Its Seabed Foundation under Ocean Wave. Appl. Sci. 2022, 12, 3299. [Google Scholar] [CrossRef]
- Cui, L.; Jeng, D.S.; Liu, J.W. Numerical analysis of the seabed liquefaction around a fixed gravity-based structure (GBS) of an offshore platform and protection. Ocean Eng. 2022, 249, 110844. [Google Scholar] [CrossRef]
- Arena, F.; Filianoti, P. Small-Scale Field Experiment on a Submerged Breakwater for Absorbing Wave Energy. J. Waterw. Port Coast. Ocean Eng. 2007, 133, 161–167. [Google Scholar] [CrossRef]
- Wang, W.H.; Gao, Z.; Moan, T.; Li, X. Model Test and Numerical Analysis of a Multi-Pile Offshore Wind Turbine under Seismic, Wind, Wave and Current Loads. J. Offshore Mech. Arct. Eng. 2016, 139, 031901. [Google Scholar] [CrossRef]
- Du, F.C. Geological Cause Analysis of Overturning of No. 3 Workover Platform in Shengli Oilfield. Ph.D. Thesis, Ocean University of China, Qingdao, China, 2013. (In Chinese). [Google Scholar]
- Amaechi, C.V.; Reda, A.; Butler, H.O.; Ja’e, I.A.; An, C. Review on Fixed and Floating Offshore Structures. Part II: Sustainable Design Approaches and Project Management. J. Mar. Sci. Eng. 2022, 10, 973. [Google Scholar] [CrossRef]
- American Petroleum Institute. API RP 2A, Recommended Practice for Planning, Designing and Constructing Fixed Offshore Platforms; API Publishing Services: Washington, DC, USA, 2004. [Google Scholar]
- Meer, J.; Briganti, R.; Zanuttigh, B.; Wang, B. Wave transmission and reflection at low-crested structures: Design formulae, oblique wave attack and spectral change. Coast. Eng. 2005, 52, 915–929. [Google Scholar] [CrossRef]
- Istrati, D.; Buckle, I.G. Tsunami Loads on Straight and Skewed Bridges—Part 2: Numerical Investigation and Design Recommendations; Technical Report (No. FHWA-OR-RD-21-13); Oregon Department of Transportation: Research Publications: Salem, OR, USA, 2021; p. 3. [CrossRef]
- Xiang, T.; Istrati, D. Assessment of Extreme Wave Impact on Coastal Decks with Different Geometries via the Arbitrary Lagrangian-Eulerian Method. J. Mar.Sci. Eng. 2021, 9, 1342. [Google Scholar] [CrossRef]
- Namlı, B. Vibration Control of Offshore Structures Using Deep Learning Prediction Methods. Master’s Thesis, İstanbul Technical University, İstanbul, Turkey, 2022. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specific gravity of the soil particle | 2.71 |
| Moisture content | 25.59% |
| Saturated density (g/cm3) | 1.780 |
| Maximum saturated density (g/cm3) | 1.719 |
| Minimum saturated density (g/cm3) | 1.286 |
| Designed dry density (g/cm3) | 1.502 |
| Minimum porosity rate emin | 0.357 |
| Maximum porosity rate emax | 0.525 |
| Module | Parameters | Real Value | Proportional Scale | Experimental Model Value |
|---|---|---|---|---|
| Platform | Width (m) | 14.4 | 0.6 | |
| Length (m) | 14.4 | 0.6 | ||
| Height (m) | 0.48 | 0.02 | ||
| Diameter of pillars (m) | 1.92 | 0.08 | ||
| Length of pillars | 24 | 1 | ||
| Wave | Wave height H (m) | 1; 2; 3; 4.46; 5.60; 7.2 | 0.042; 0.083; 0.125; 0.186; 0.233; 0.30 | |
| Wave period T (s) | 8; 10; 12 | = 240.5 = 4.9 | 1.63; 2.04; 2.45 | |
| Water depth h (m) | 10; 12; 15 | 0.417; 0.50; 0.625 | ||
| Monitoring objects | Pressure (kPa) | - | - | |
| Acceleration (g) | - | - | ||
| Displacement (m) | - | - |
| Test Number | Wave Period T (s) | (m) | Wave Celerity C (m/s) | |||
|---|---|---|---|---|---|---|
| Normal conditions | 1 | 41.7 | 4.2 | 1.63 | 2.95 | 1.81 |
| 2 | 41.7 | 8.3 | 1.63 | 2.95 | 1.81 | |
| 3 | 41.7 | 18.6 | 1.63 | 2.95 | 1.81 | |
| Extreme conditions with waves of large wave height | 4 | 41.7 | 23.3 | 1.63 | 2.95 | 1.81 |
| 5 | 50.0 | 30.0 | 2.04 | 4.15 | 2.03 | |
| 6 | 62.5 | 20.8 | 2.45 | 5.64 | 2.30 | |
| Conditions | T (s) | Stationary State | ||
|---|---|---|---|---|
| Normal operating conditions | 41.7 | 4.2 | 1.63 | Yes |
| 41.7 | 8.3 | 1.63 | Yes | |
| 41.7 | 12.5 | 1.63 | Yes | |
| Extreme conditions with waves of large wave height | 41.7 | 18.6 | 1.63 | No |
| 50.0 | 23.3 | 2.04 | No | |
| 62.5 | 30.0 | 2.45 | No |
| Tower Type | Period (s) | Equivalent Damping | ||
|---|---|---|---|---|
| Surge | Pitch | Surge | Pitch | |
| Tower without damping device | 0.18 | 0.21 | 0.364 | 0.354 |
| Tower with damping device | 0.20 | 0.23 | 0.500 | 0.473 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, H.; Zu, F.; Jiang, C.; Bai, W.; Fan, Y. Experimental Investigation of the Coupling Effect of Jackup Offshore Platforms, Towers, and Seabed Foundations under Waves of Large Wave Height. Water 2023, 15, 24. https://doi.org/10.3390/w15010024
Ye H, Zu F, Jiang C, Bai W, Fan Y. Experimental Investigation of the Coupling Effect of Jackup Offshore Platforms, Towers, and Seabed Foundations under Waves of Large Wave Height. Water. 2023; 15(1):24. https://doi.org/10.3390/w15010024
Chicago/Turabian StyleYe, Hailin, Feng Zu, Chuwei Jiang, Wenjing Bai, and Yaojiang Fan. 2023. "Experimental Investigation of the Coupling Effect of Jackup Offshore Platforms, Towers, and Seabed Foundations under Waves of Large Wave Height" Water 15, no. 1: 24. https://doi.org/10.3390/w15010024
APA StyleYe, H., Zu, F., Jiang, C., Bai, W., & Fan, Y. (2023). Experimental Investigation of the Coupling Effect of Jackup Offshore Platforms, Towers, and Seabed Foundations under Waves of Large Wave Height. Water, 15(1), 24. https://doi.org/10.3390/w15010024