
Defining and Mitigating Flow Instabilities in Open Channels Subjected to Hydropower Operation: Formulations and Experiments


 ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Methodology, Theoretical Formulations, and Experiments
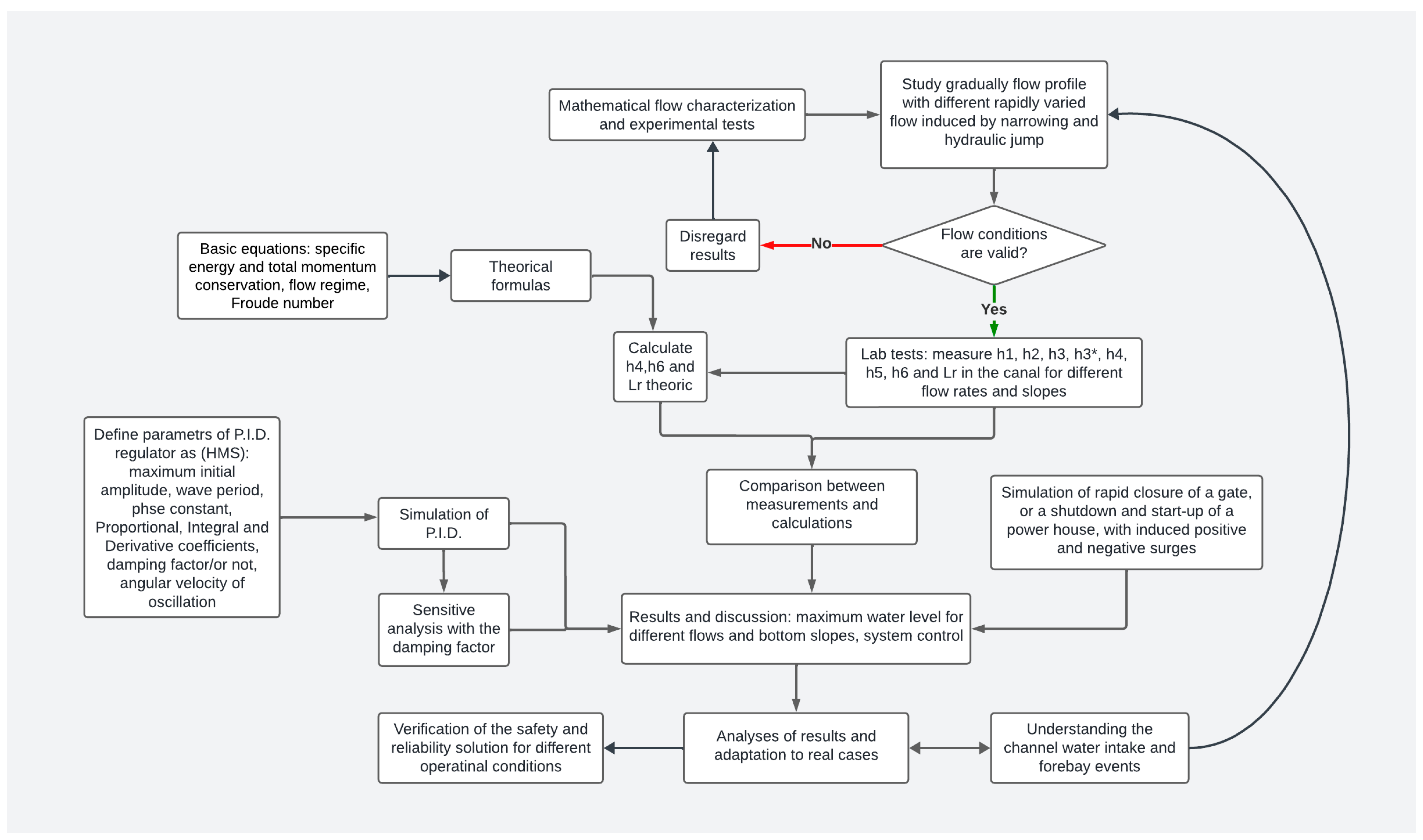
2.1. Methodology
- Ensure adequate conditions for the water intake of the penstock and associated equipment (e.g., trash rack, sluices, gates, and weirs) while meeting the minimum flooding criteria;
- Limiting flow fluctuations along the canal due to operating changes in the hydropower station;
- Providing a control function to meet the temporary needs of the turbines regardless of the flow regime.
2.2. Theory and Formulations
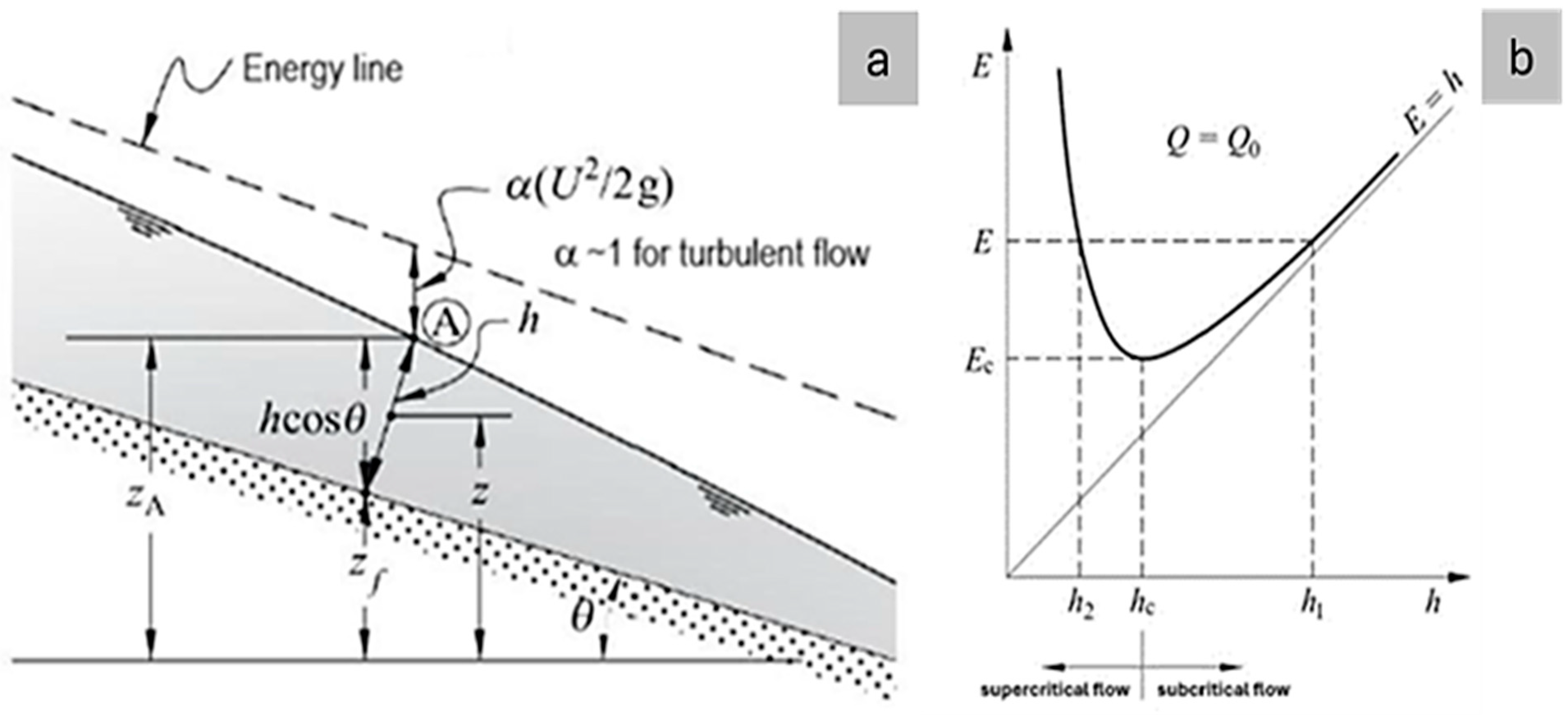
2.2.1. Bernoulli Equation and Specific Energy
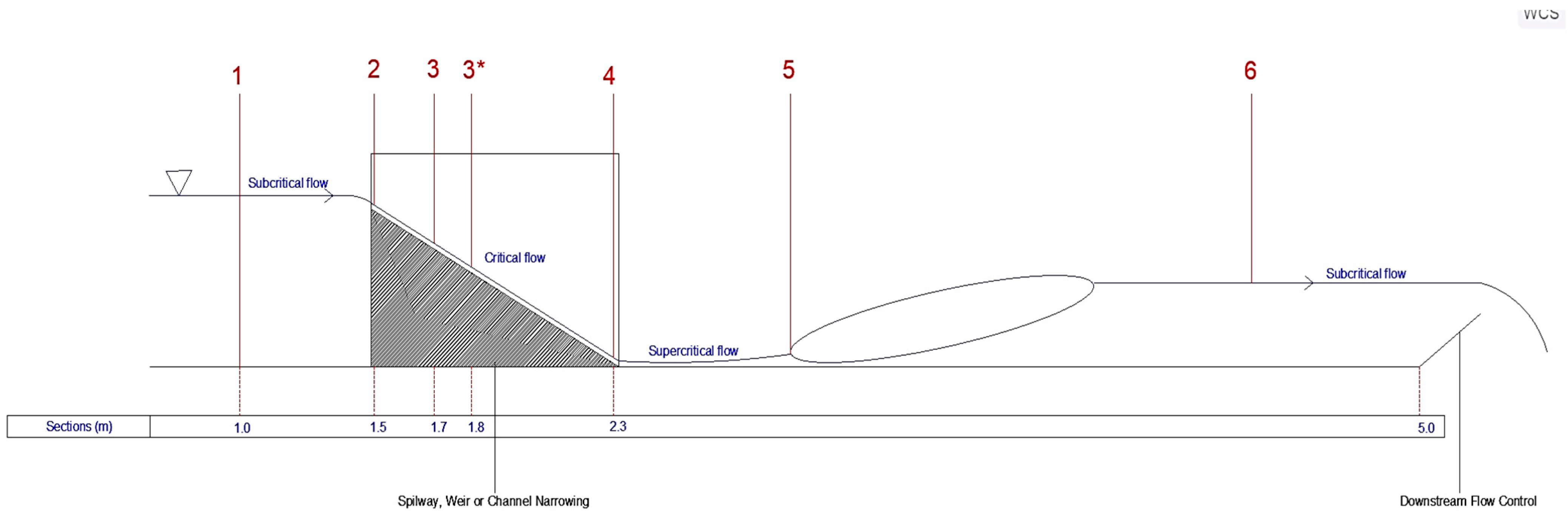
2.2.2. Supercritical, Critical, and Subcritical Flow
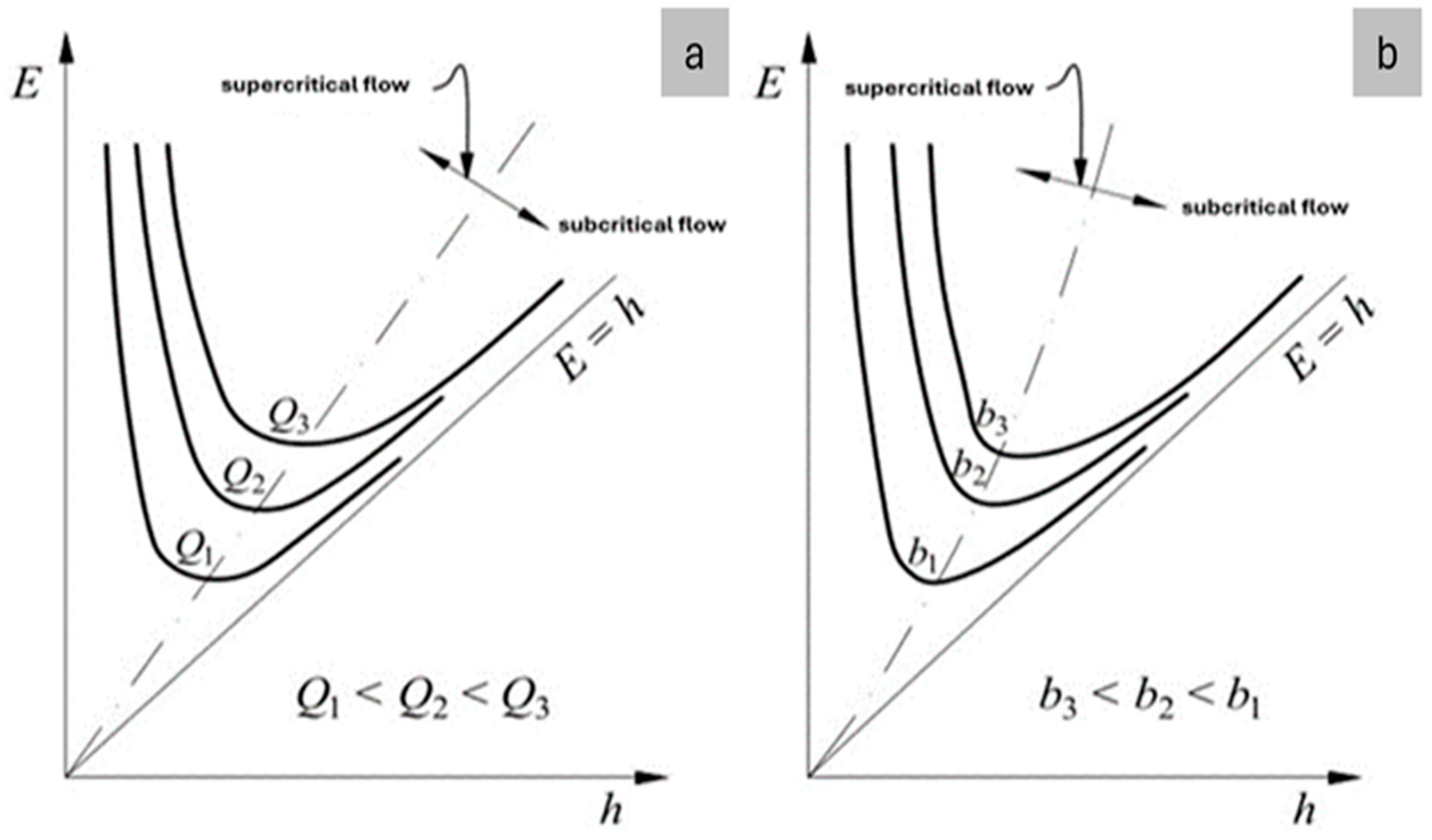
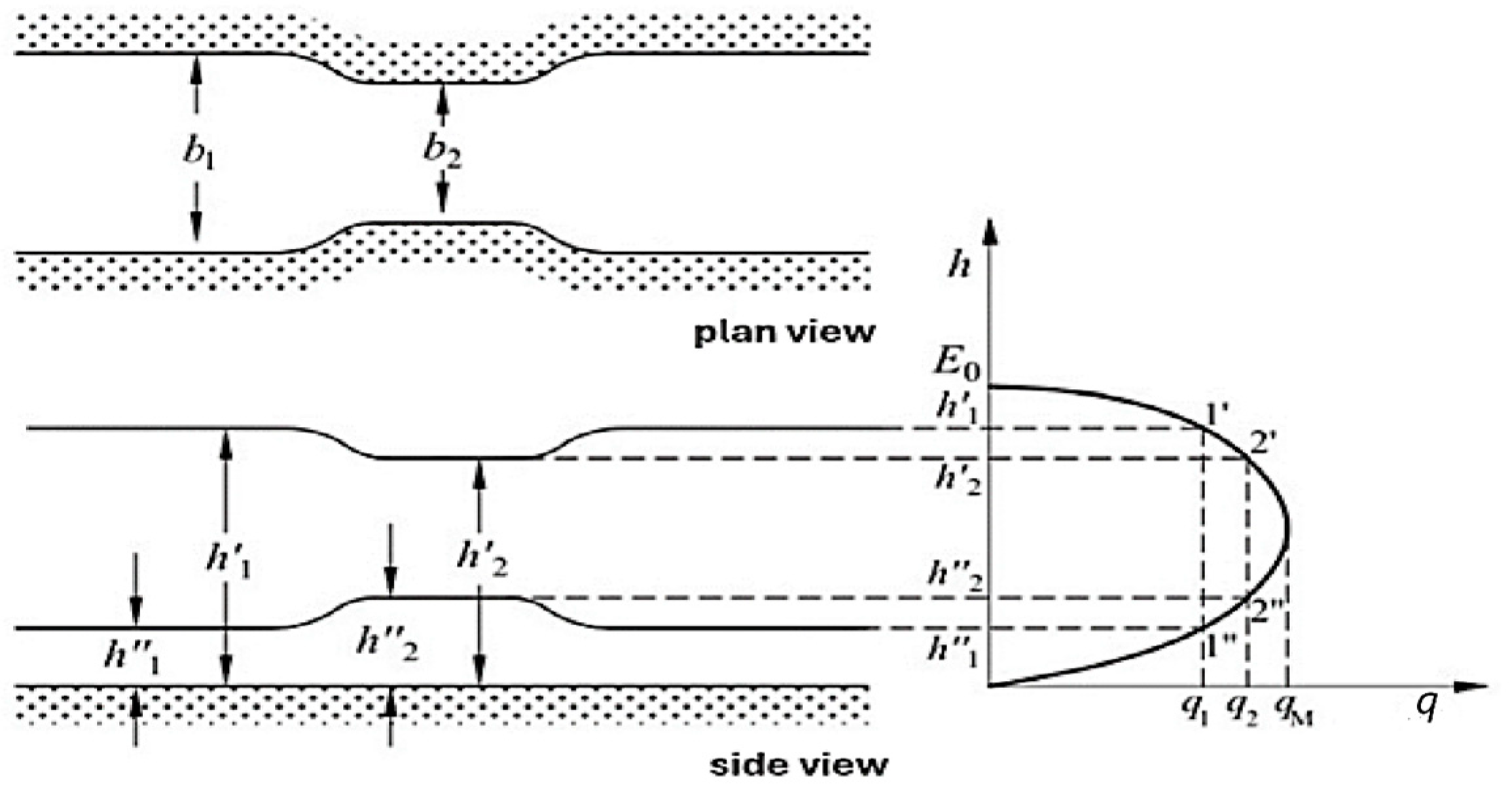
2.2.3. Influence of the Flow Rate and the Width on the Progression of E = E(h) Curves
2.2.4. Maximum Flow Rate for E = E0
2.2.5. Slope Influence and Froude Number
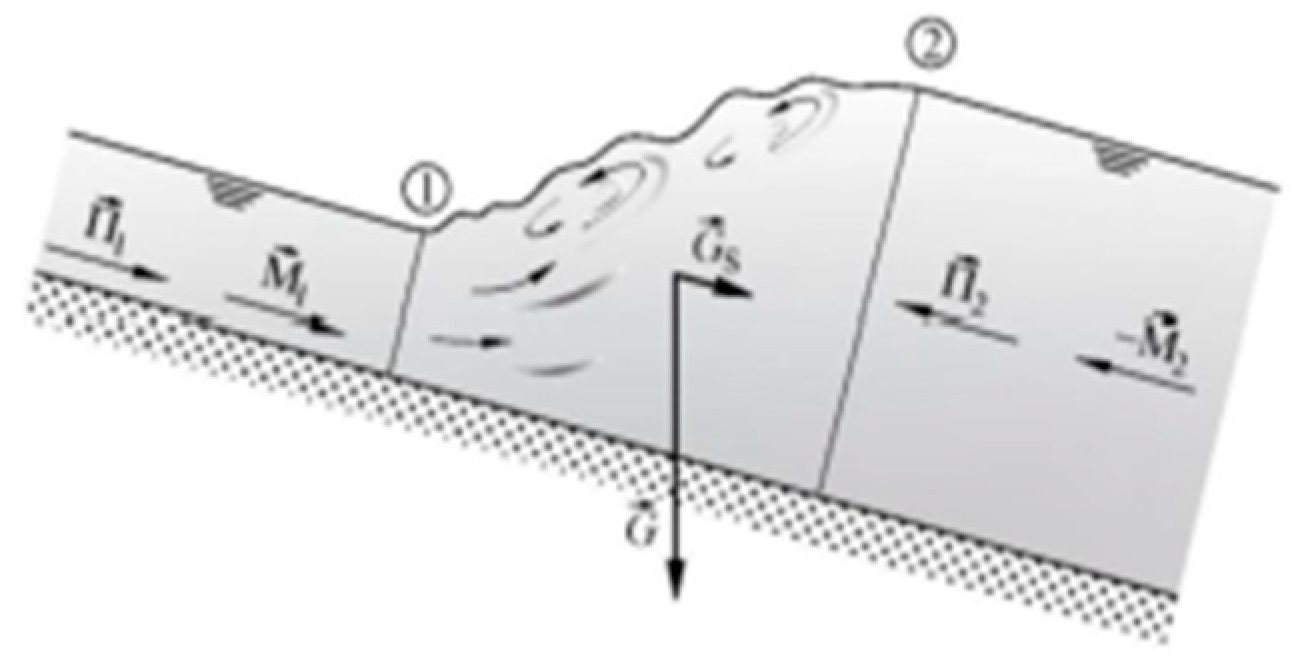
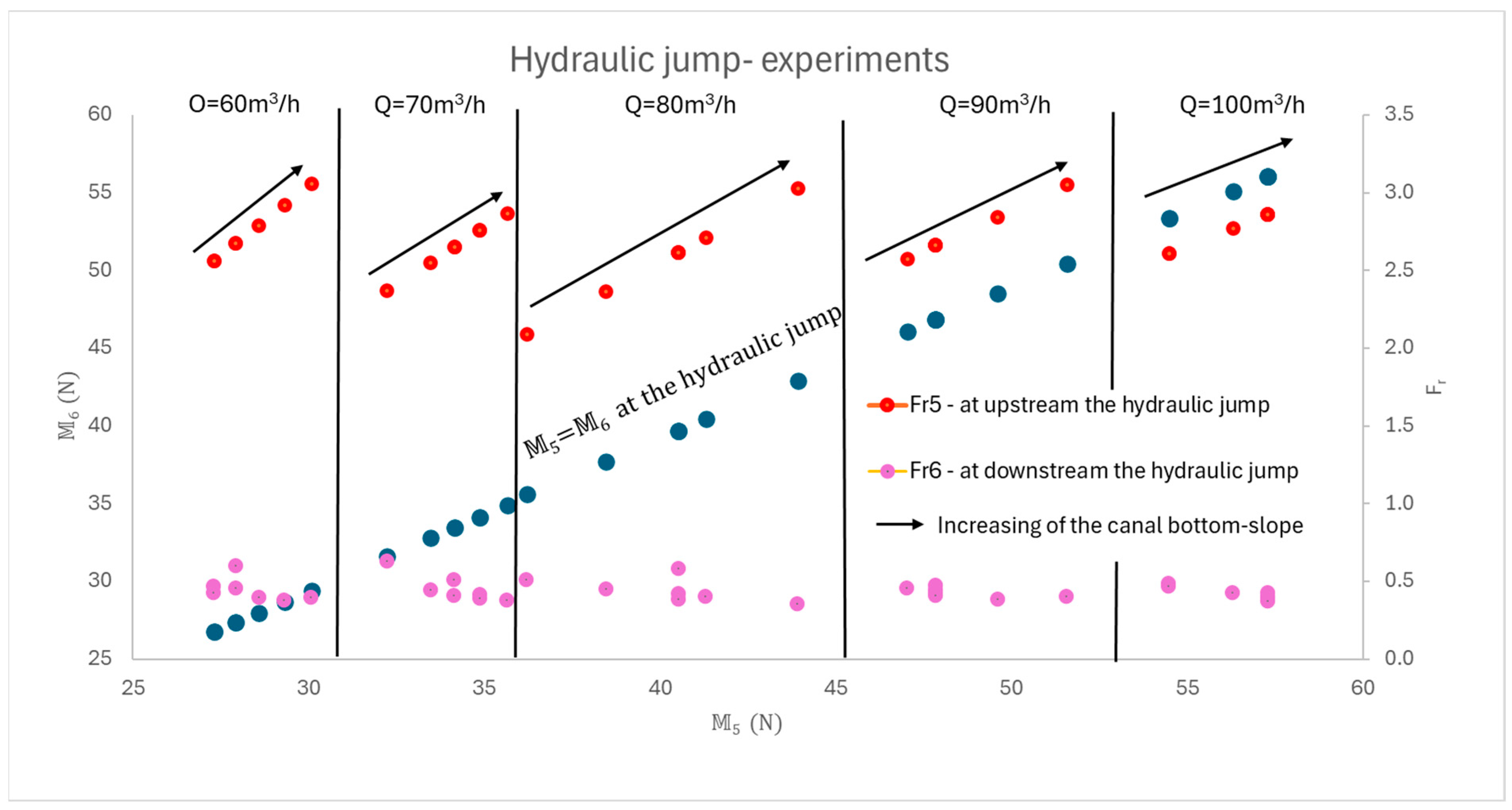
2.2.6. Conservation of Total Momentum in a Hydraulic Jump
2.2.7. Head Loss in a Hydraulic Jump
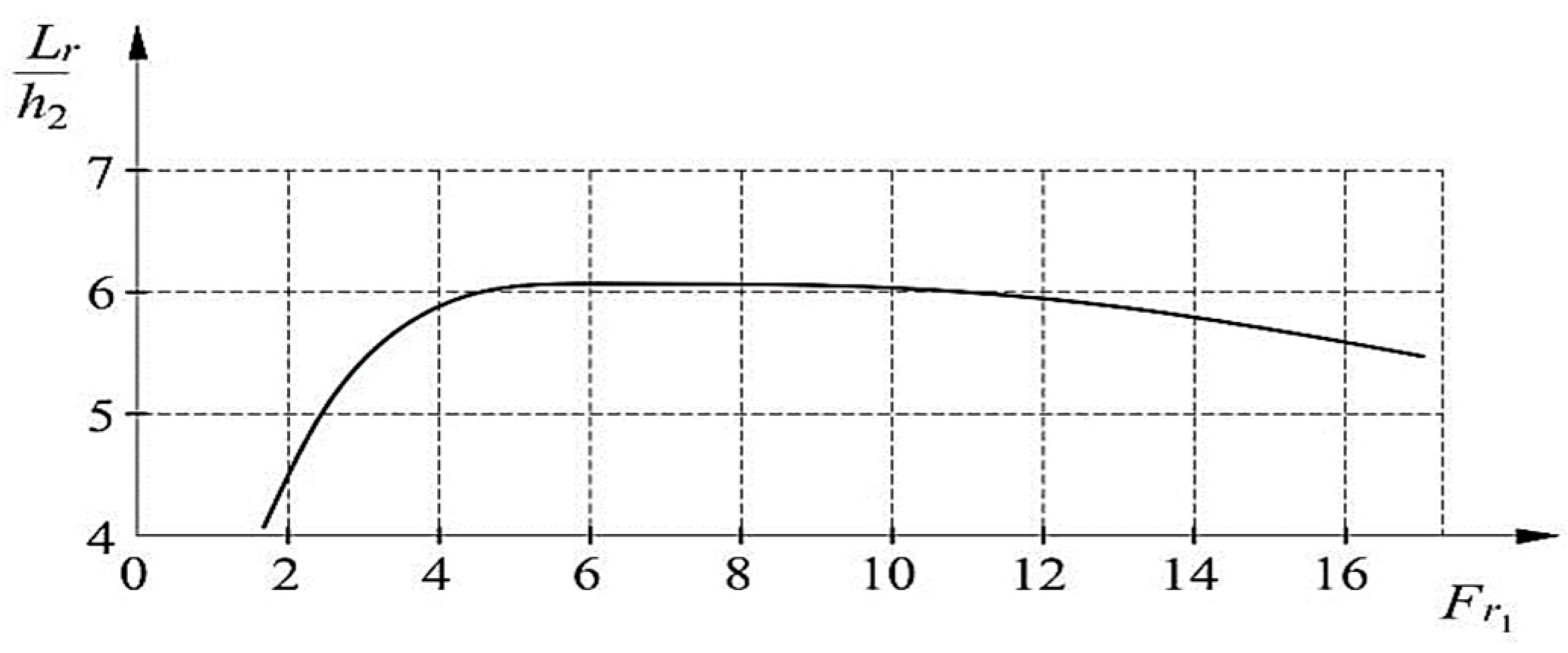
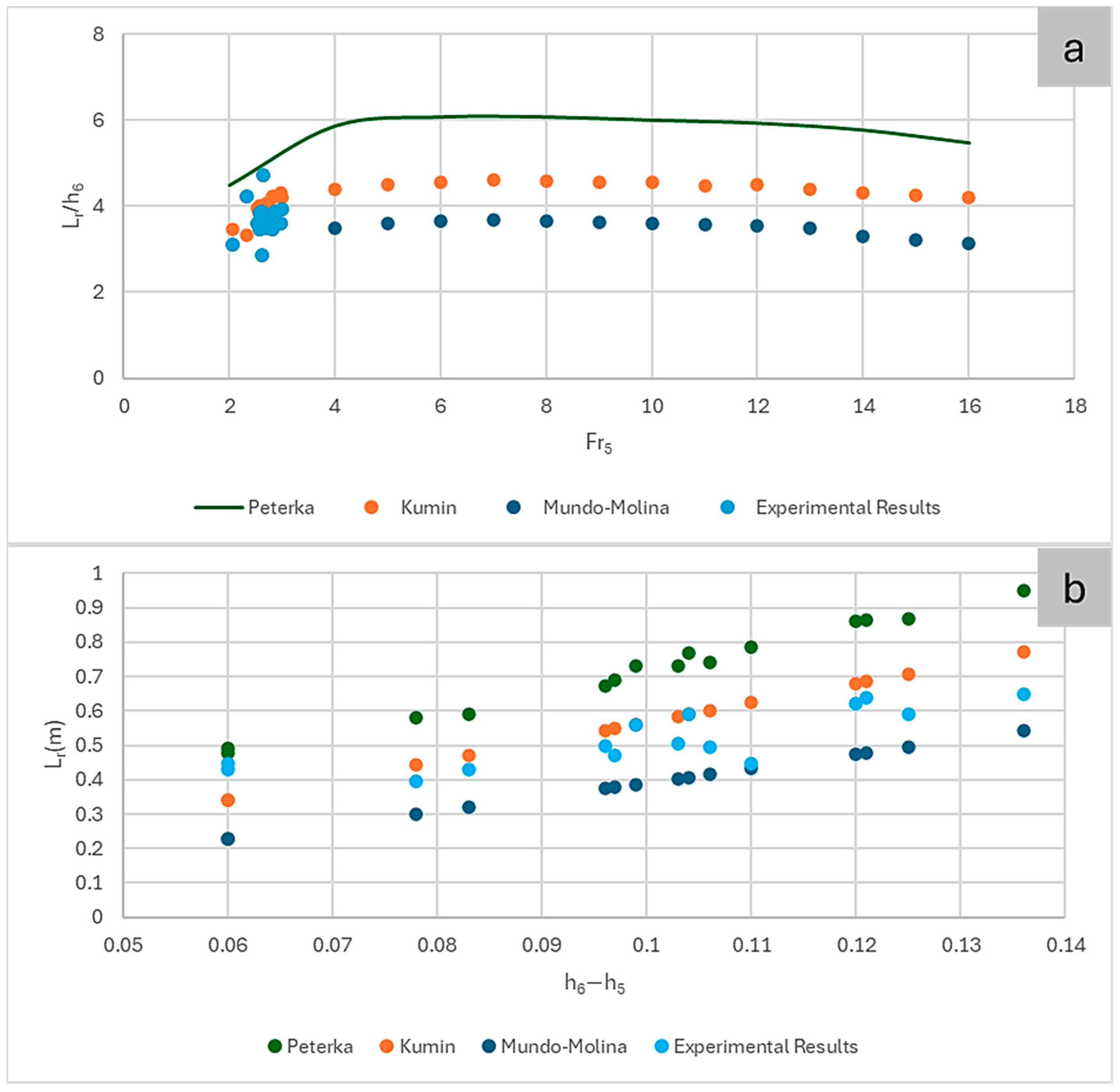
2.2.8. Hydraulic Jump Length
2.2.9. Function for Q = Q0
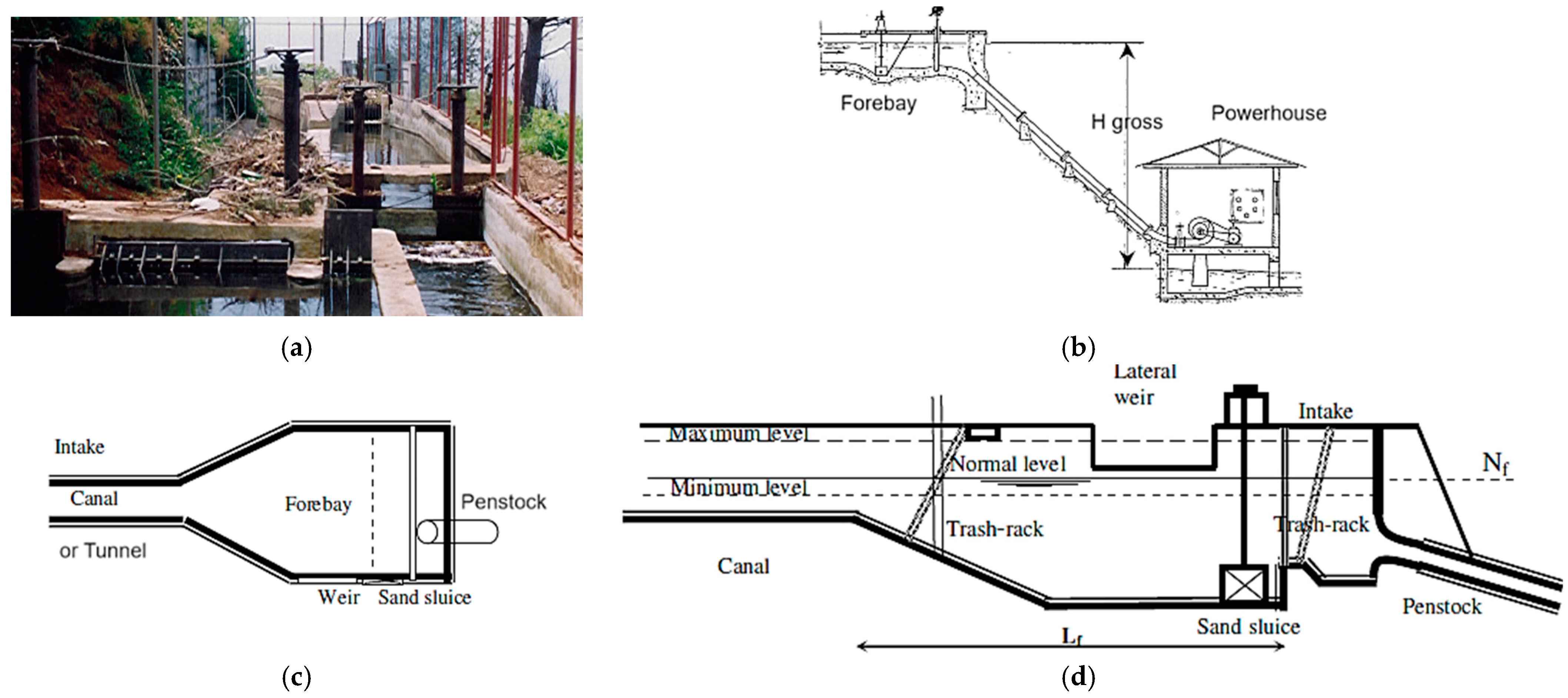
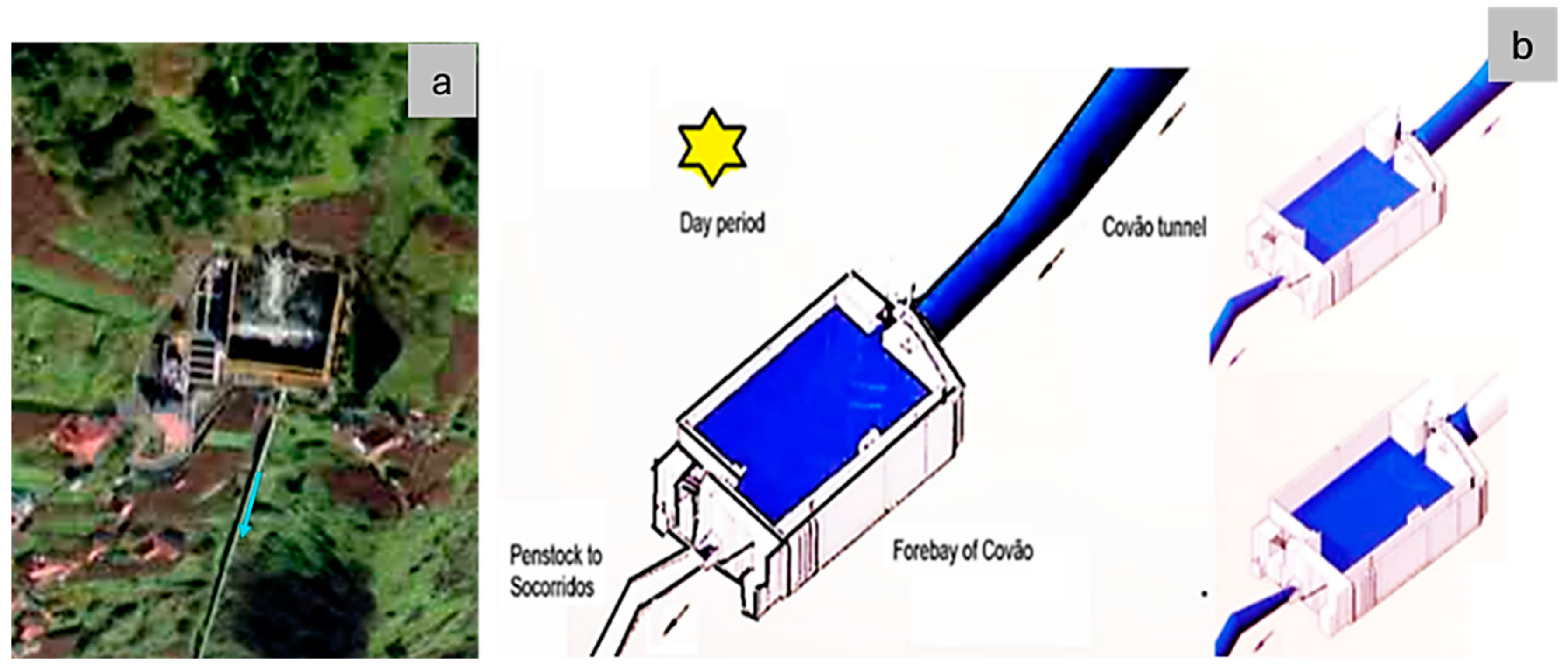
2.2.10. Forebay
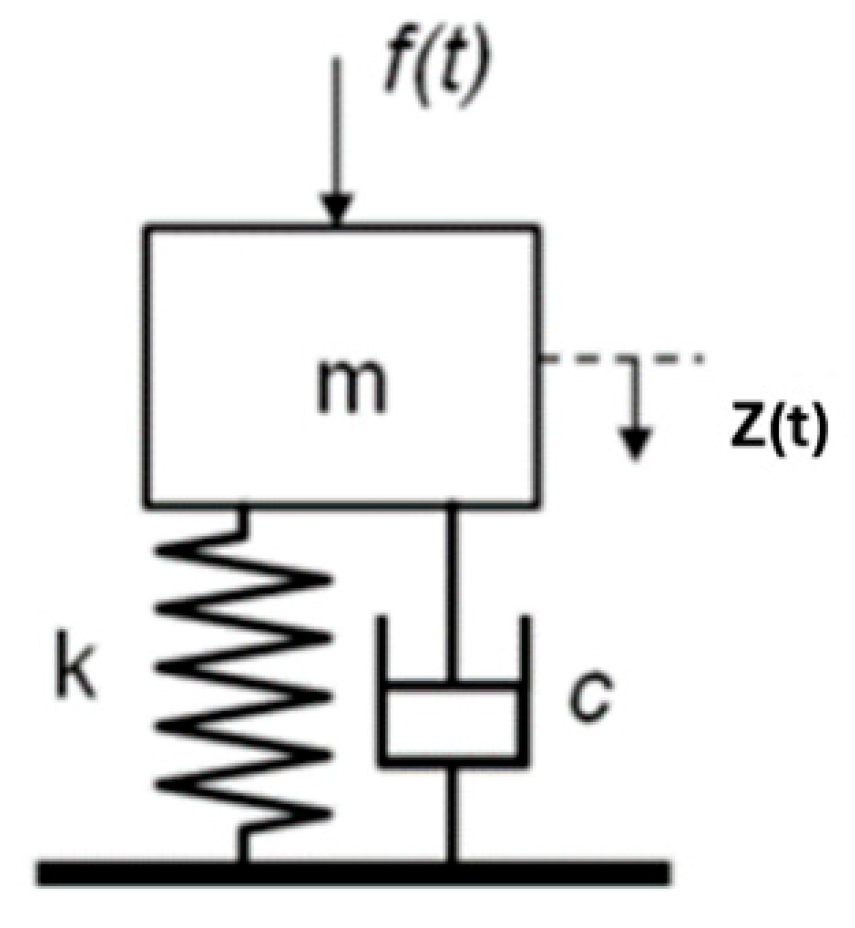
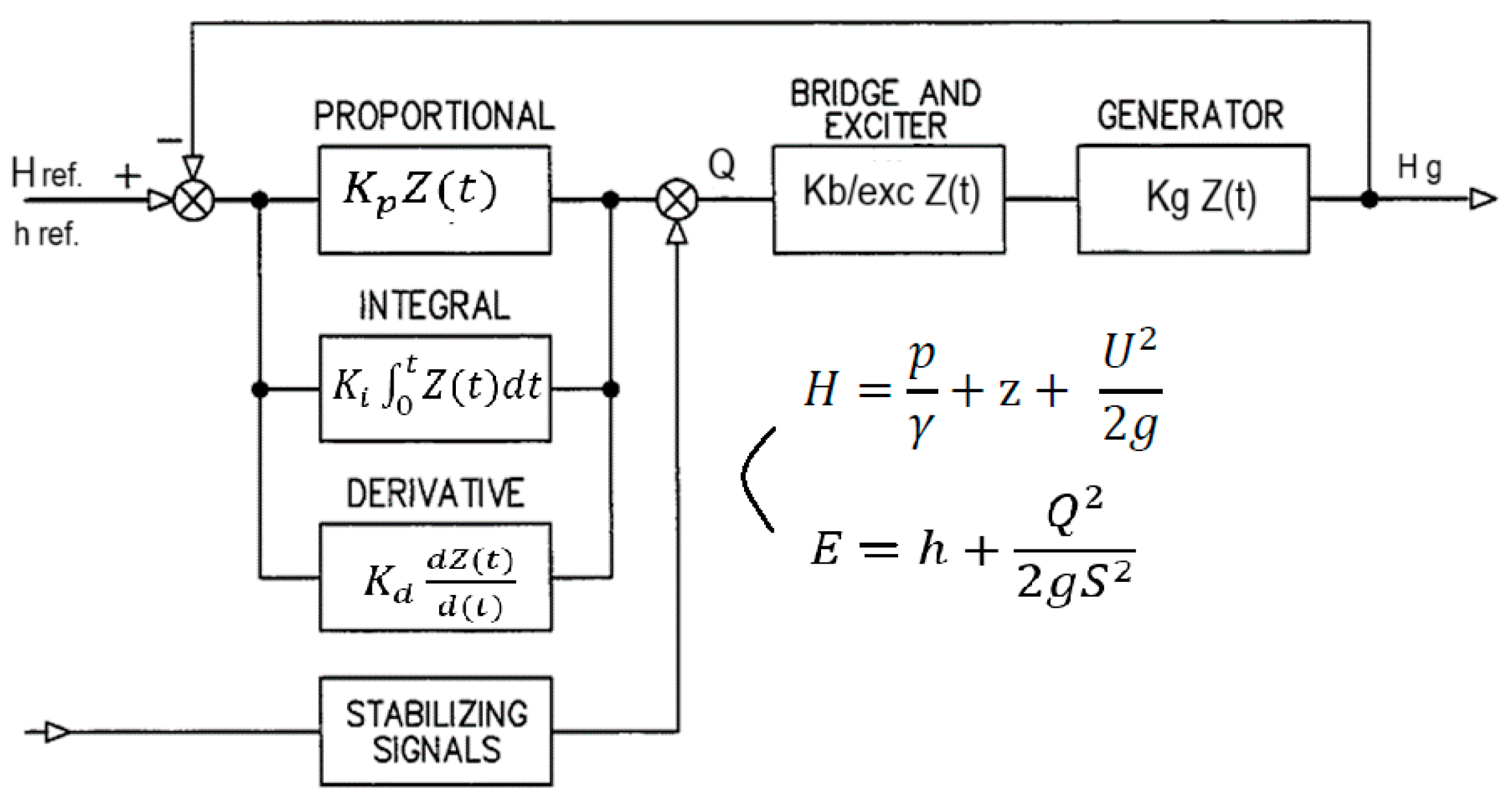
2.2.11. Water Level Control (PID Regulator)
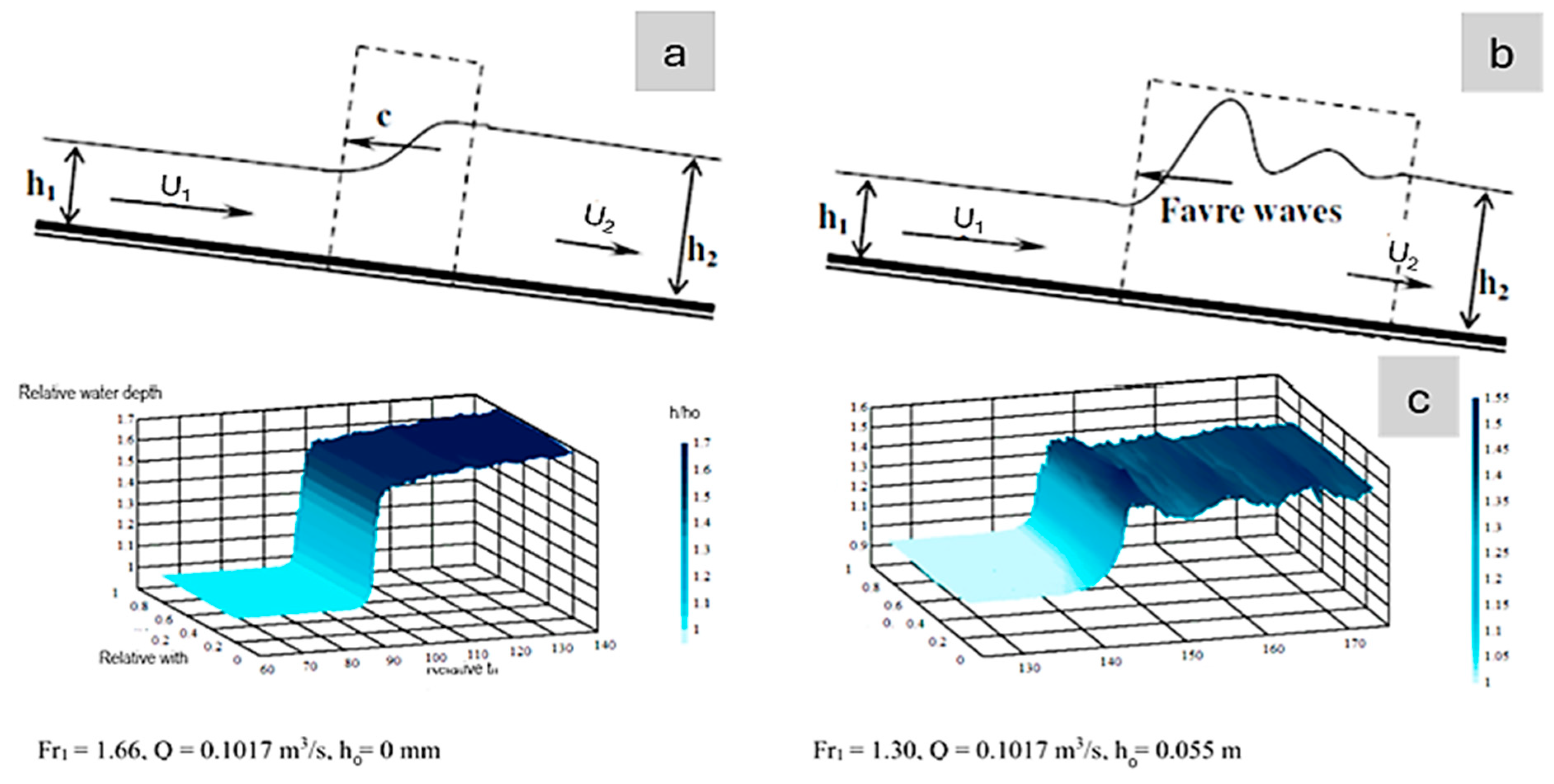
- Stage 1: the front of the shaft is fairly smooth;
- Stage 2: the wave head becomes rough and forms some waves on the surface (Figure 11a).
- Stage 3: flatter waves are observed, and the amplitude of the wave is shown to decrease (Figure 11b).
- Stage 4: the front of the wave is practically vertical, and these waves are called breaking tidal waves (Figure 11c).
- c is the damping coefficient;
- (t) is the velocity of movement of a mass to a fixed point.
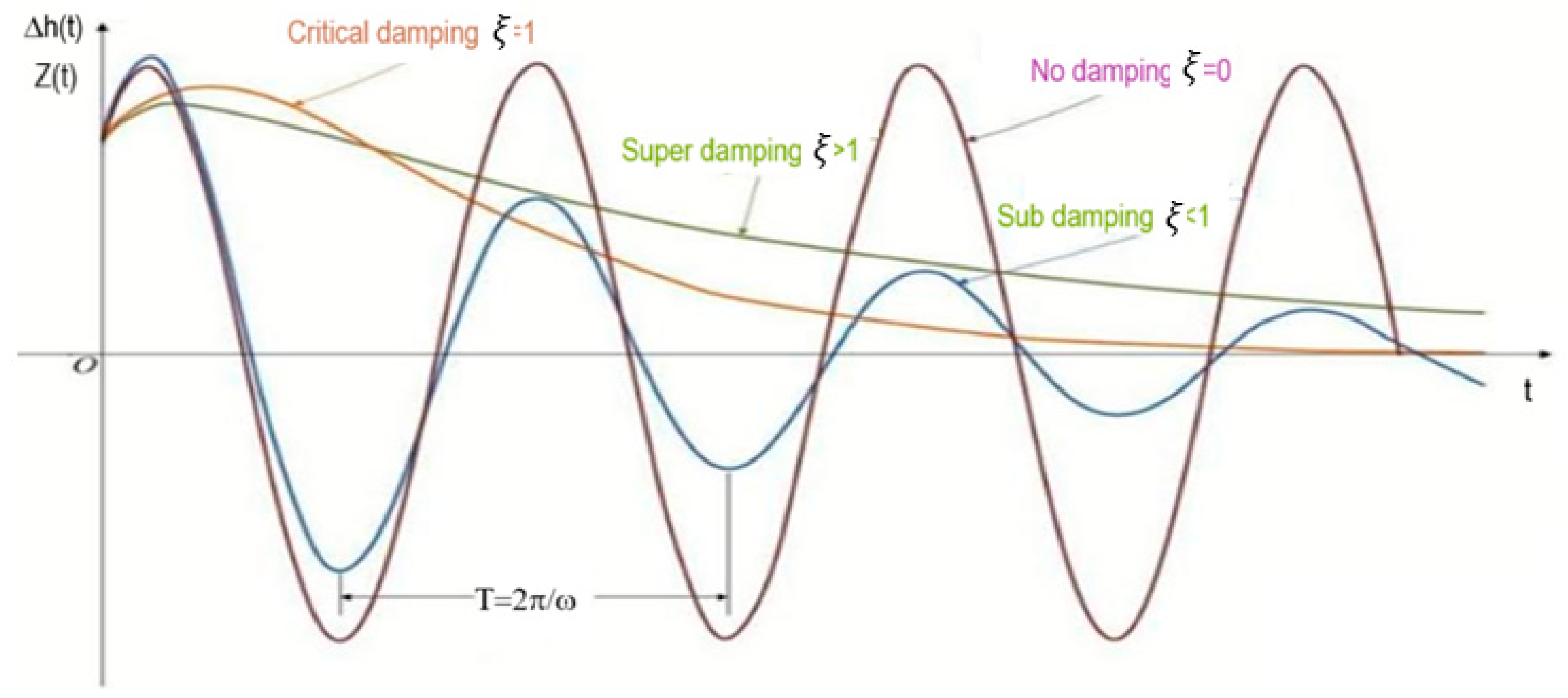
- if ξ < 1, the system is called underdamped;
- if ξ = 1 the system is called critically damped;
- if ξ > 1, the system is called overdamped.
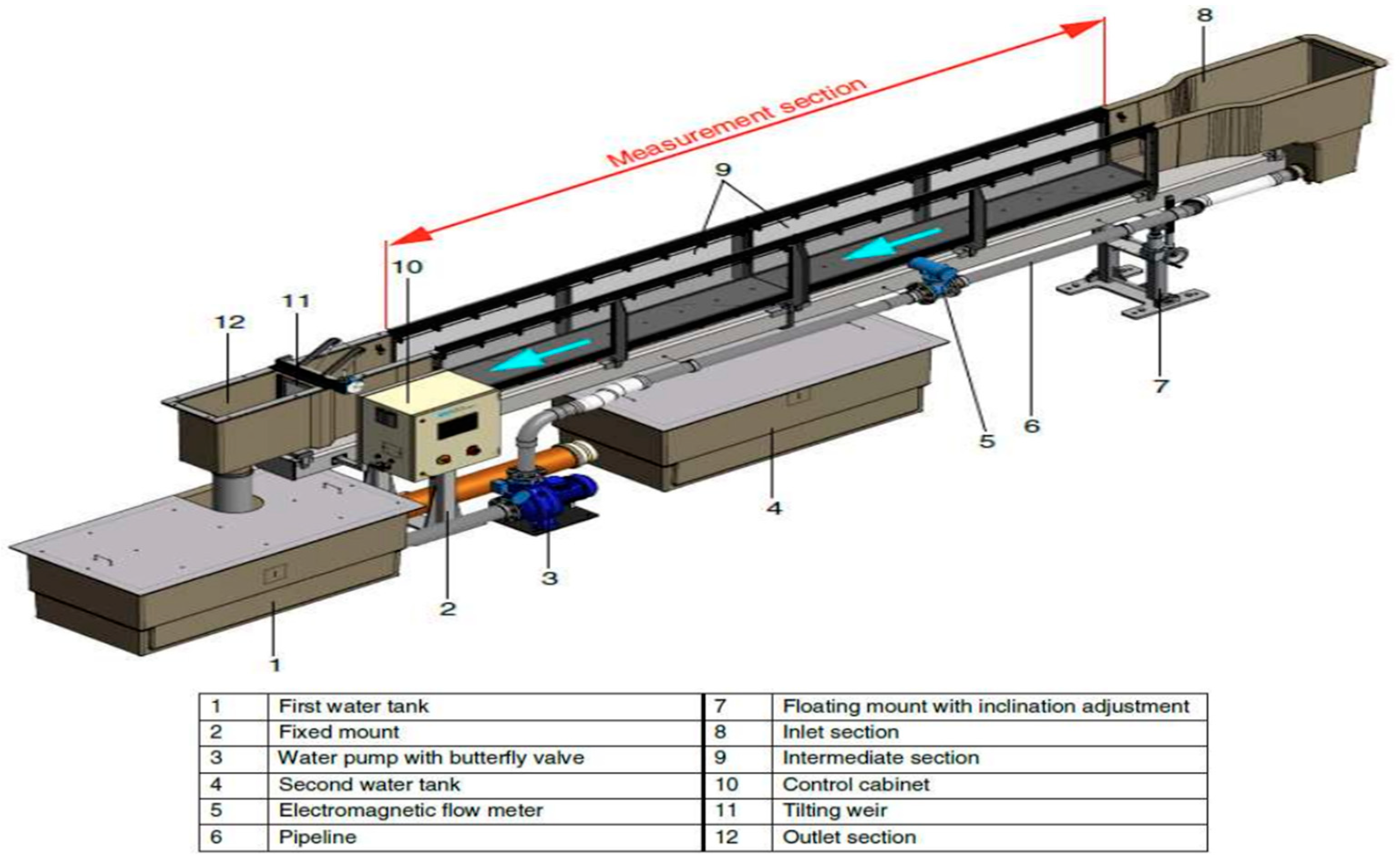
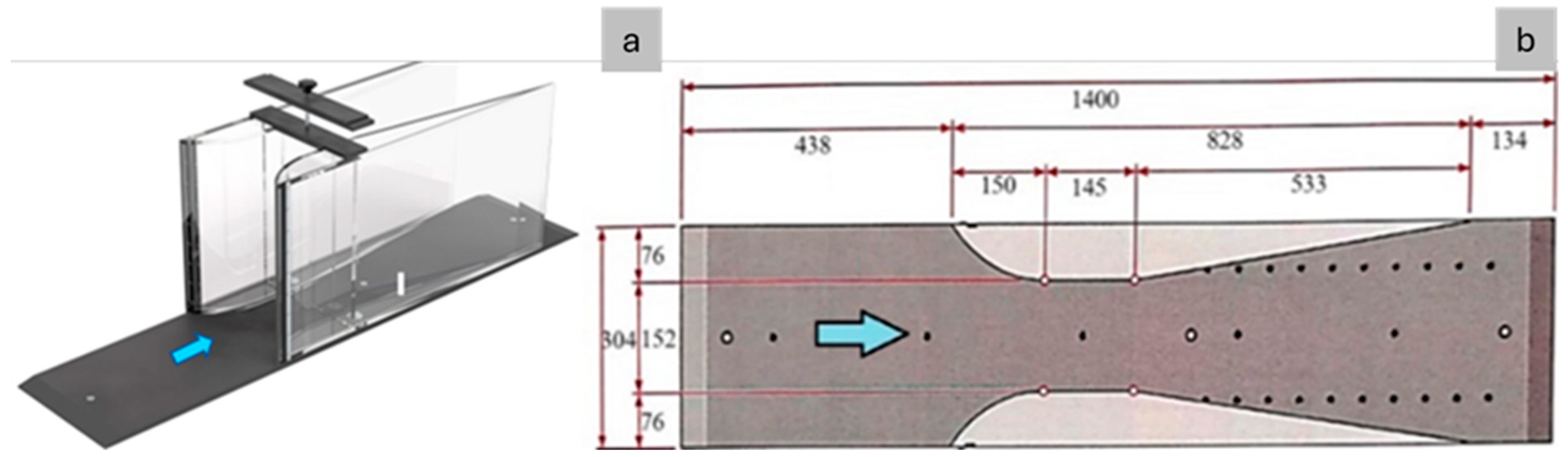
2.3. Experimental Tests and Case Study
Lab Set-Up Description
3. Discussion of Obtained Results
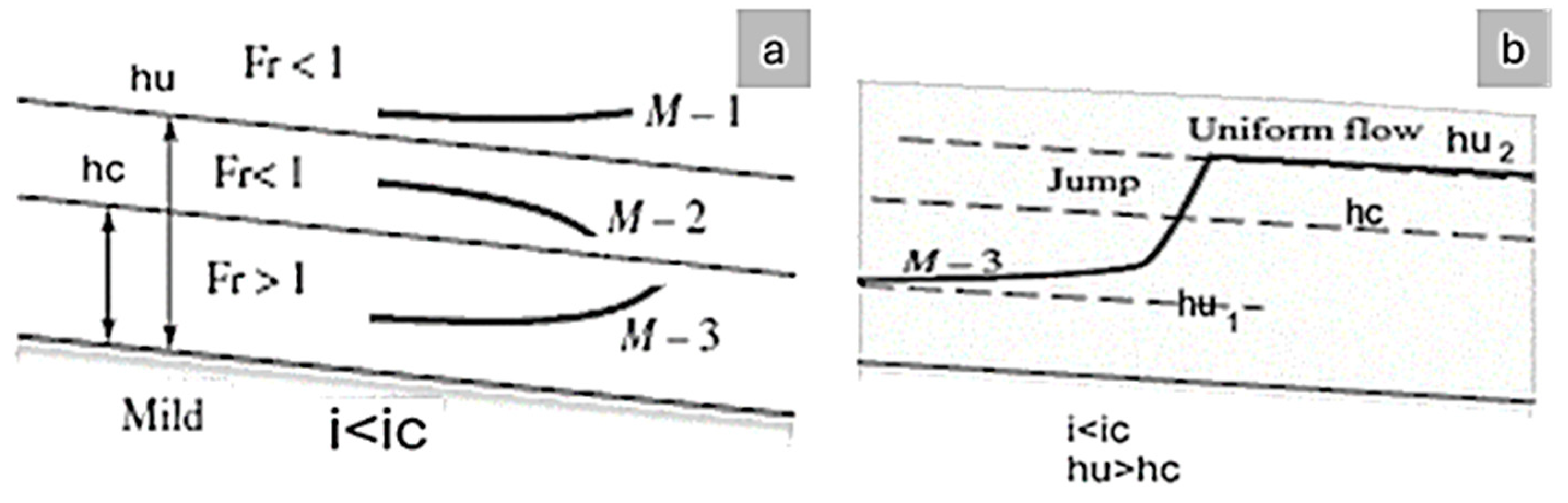
3.1. Gradually Varied Flow
3.2. Rapidly Varied Flow
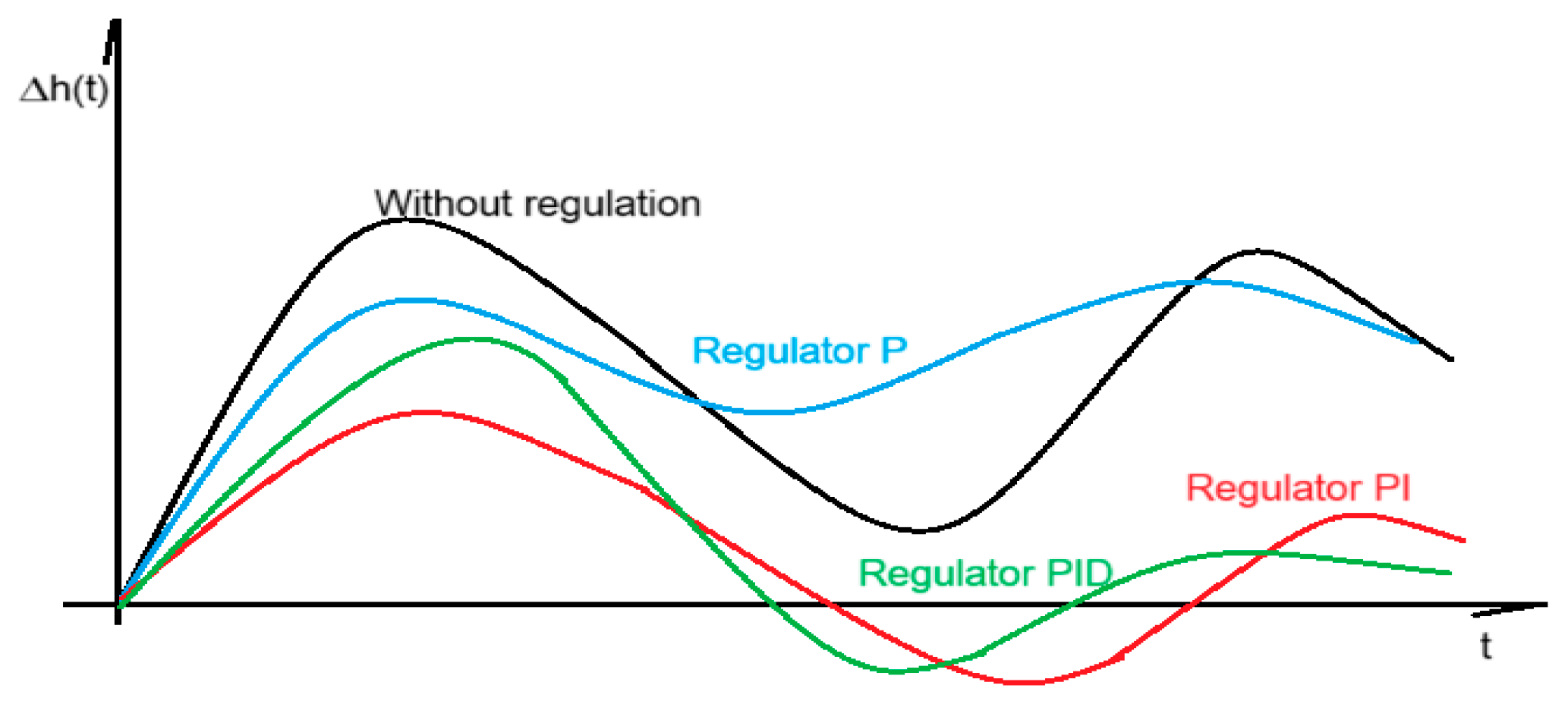
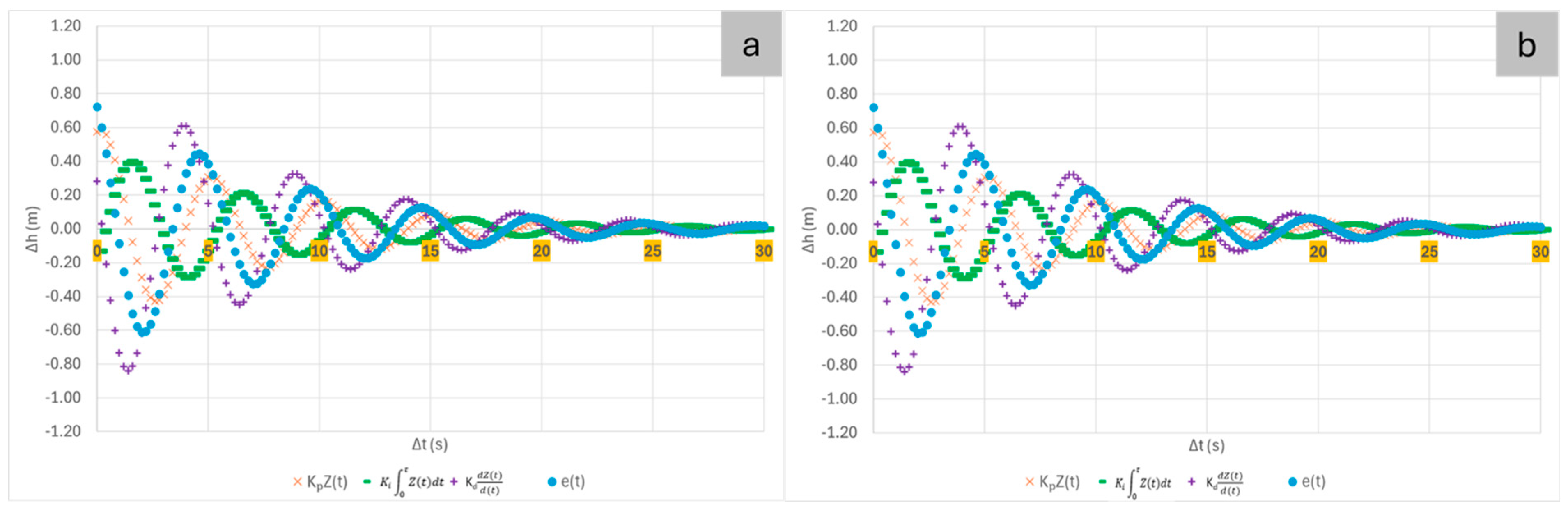
3.3. Simulation of a PID Regulator
3.3.1. Parameters and Operating Scheme
3.3.2. Formulations for Water Level Regulation Without Damping Effect
3.3.3. Regulation with Dissipative Effect
3.3.4. Sensitivity Analysis of the Damping Effect
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| (t) | Velocity of movement of a mass to a fixed point (m/s) |
| Acceleration (m/s2) | |
| Time interval (s) | |
| A | Amplitude of the surge wave (m) |
| b | Bottom-width of the canal (m) |
| c | Damping coefficient (Ns/m) |
| Cc | Critical damping coefficient (Ns/m) |
| E | Specific energy (m) |
| Ec | Critical specific energy (m) |
| f | Phase constant (-) |
| Fd | Damping force (N) |
| Fr | Froude number (-) |
| Fr0 | Initial Froude number |
| g | Gravity acceleration (m/s2) |
| H | Total head (m) |
| h | Water depth (m) |
| hc | Critical water depth (m) |
| hg | Depth of the center of gravity (m) |
| hm | Average flow water depth (m) |
| hu | Uniform water depth (m) |
| i | Slope of the canal (%) |
| ic | Critical slope (%) |
| J | Head loss per unit length (m/m) |
| K | Strickler coefficient (m1/3/s) |
| k | Spring constant (N/m) |
| Kd | Differential coefficient (-) |
| Ki | Integral coefficient (-) |
| Kp | Proportional coefficient (-) |
| l | Length (m) |
| Lr | Length of the hydraulic jump (m) |
| m | Mass (kg) |
| M | Momentum (N) |
| Q | Flow rate (m3/s) |
| qM | Maximum flow rate per unit width (m3/s/m) |
| QM | Maximum flow rate (m3/s) |
| S | Cross-section flow area (m2) |
| Sc | Critical cross-section flow area (m2) |
| T | Wave period (s) |
| U | Velocity (m/s) |
| w | Angular velocity (rad/s) |
| z | Vertical elevation of the water (m) |
| Z(t) | Variation in the water depth provoked by surge waves with a periodic and non-periodic oscillatory motion (m) |
| Zf | Canal bottom elevation (m) |
| α | Coriolis coefficient |
| γ | Specific weight of the fluid (N/m3) |
| ΔEr | Head loss in the hydraulic jump (m) |
| Δh | Surge water depth above the initial water level (m) |
| Δh(t) | Variation in the surge waves above the output level in the forebay per unit of time in a specific section (m) |
| θ | Angle formed by the tangent of the longitudinal profile of the channel bottom with the horizontal (°) |
| Total momentum (N) | |
| π | Resultant of hydrostatic pressure (N) |
| ξ | Damping ratio (-) |
| ϕ | Phase constant (-) |
References
- Safdar, I.; Sultan, S.; Raza, H.A.; Umer, M.; Ali, M. Empirical analysis of turbine and generator effciency of a Pico hydro system. Sustain. Energy Technol. Assess. 2020, 37, 100605. [Google Scholar] [CrossRef]
- Safarian, S.; Unnþórsson, R.; Ritcher, C. A review of biomass gasification modelling. Renew. Sustain. Energy Rev. 2019, 110, 378–391. [Google Scholar] [CrossRef]
- Ramos, H. Guidelines for Design of Small Hydropower Plants; WREAN (Western Regional Energy Agency and Network) and DED (Department of Economic Development-Energy Division): Belfast, UK, 2000; pp. 153–154. [Google Scholar]
- Masotti, D. Comparison of Methods for Determining Structural Damping Through Frequency Response Function Curve-Fitting Techniques; Universidade Federal de Santa Catarina: Florianopolis, Brazil, 2013; pp. 46–49, 65–66. [Google Scholar]
- Liggett, J.A. Fluid Mechanics; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Lighthill, J. Waves in Fluids; Cambridge University Press: Cambridge, UK, 1978; p. 504. [Google Scholar]
- Wanoschek, R.; Hager, W.H. Hydraulic jump in trapezoidal channel. J. Hydraul. Res. 1989, 27, 429–446. [Google Scholar] [CrossRef]
- Chanson, H. Momentum considerations in hydraulic jumps and bores. J. Irrig. Drain. Eng. 2012, 138, 382–385. [Google Scholar] [CrossRef]
- Kiri, U.; Leng, X.; Chanson, H. Positive Surge Propagation in a Non-Rectangular Asymmetrical Channel; Hydraulic Model Report No. CH110/18; School of Civil Engineering, The University of Queensland: Brisbane, Australia, 2018; p. 159. [Google Scholar]
- Treske, A. Undular bores (favre-waves) in open channels—Experimental studies. J. Hydraul. Res. 1994, 32, 355–370. [Google Scholar] [CrossRef]
- Zheng, F.; Li, Y.; Xuan, G.; Li, Z.; Zhu, L. Characteristics of positive surges in a rectangular channel. Water 2018, 10, 1473. [Google Scholar] [CrossRef]
- Leng, X.; Chanson, H. Coupling between free-surface fluctuations, velocity fluctuations and turbulent Reynolds stresses during the upstream propagation of positive surges, bores and compression waves. Environ. Fluid Mech. 2016, 16, 695–719. [Google Scholar] [CrossRef]
- Shi, J.; Tong, C.; Yan, Y.; Luo, X. Influence of varying shape and depth on the generation of tidal bores. Environ. Earth Sci. 2014, 72, 2489–2496. [Google Scholar] [CrossRef]
- Kiri, U.; Leng, X.; Chanson, H. Positive surge propagating in an asymmetrical canal. J. Hydro-Environ. Res. 2020, 31, 41–47. [Google Scholar] [CrossRef]
- Musa, R.; Triffandy, M.W.; Rusaldy, A. Application of Specific Energy in Open Channels to Various Forms of Channel Constriction. WSEAS Trans. Appl. Theor. Mech. 2022, 17, 39–46. [Google Scholar] [CrossRef]
- Harianja, J.A.; Gunawan, S. Overview of Specific Energy Due to Constriction of Open Channels, 1st ed.; Scientific Magazine; UKRIM: Yogyakarta, Indonesia, 2007; pp. 30–46. [Google Scholar]
- Musa, R.; Rusaldy, R.A. Analysis of Changes in the Effect Flow Rate on the Open Channel. In Proceedings of the International Seminar of Science and Applied Technology (ISSAT 2020), Virtual, 24 November 2020. [Google Scholar]
- Cheng, Y.; Song, Y.; Liu, C.; Wang, W.; Hu, X. Numerical Simulation Research on the Diversion Characteristics of a Trapezoidal Channel. Water 2022, 14, 2706. [Google Scholar] [CrossRef]
- Li, T.; Zou, J.; Qu, S.J.; Liu, Z.; Ren, Z.H.; Tian, W.J. Local head loss of 90° lateral diversion from open channels of different cross-sectional shapes. J. Hydroelectr. Eng. 2017, 36, 30–37. [Google Scholar]
- Hadian, S.; Afzalimehr, H.; Ahmad, S. Effects of Channel Width Variations on Turbulent Flow Structures in the Presence of Three-Dimensional Pool-Riffle. Sustainability 2023, 15, 7829. [Google Scholar] [CrossRef]
- Wan, Z.; Li, Y.; Wang, X.; An, J.; Dong, B.; Liao, Y. Influence of Unsteady Flow Induced by a Large-Scale Hydropower Station on the Water Level Fluctuation of Multi-Approach Channels: A Case Study of the Three Gorges Project, China. Water 2020, 12, 2922. [Google Scholar] [CrossRef]
- Li, W.; Wang, D.; Yang, S.; Yang, W. Three Gorges project: Benefits and challenges for shipping development in the upper Yangtze river. Int. J. Water Resour. Dev. 2020, 37, 758–771. [Google Scholar] [CrossRef]
- Jia, T.; Qin, H.; Yan, D.; Zhang, Z.; Liu, B.; Li, C.; Wang, J.; Zhou, J. Short-term multi-objective optimal operation of reservoirs to maximize the benefits of hydropower and navigation. Water 2019, 11, 1272. [Google Scholar] [CrossRef]
- Pinheiro, A. Hydraulic II, Chapter 1, Free Surface Flows. Version 2021. IST. (In Portuguese)
- White, F.M. Fluid Mechanics, 7th ed.; Mcgraw-Hill Series in Mechanical Engineering; McGraw-Hill: New York, NY, USA, 2011; ISBN 978-0-07-352934-9. [Google Scholar]
- Mundo-Molina, M.; Pérez, J.L.D. Proposed Equation to Estimate the Length of a Hydraulic Jump in a Rectangular Open Channel Hydraulic with Variable Slope, and Its Comparison with Seven Theoretical Equations of Specialized Literature. J. Water Resour. Prot. 2019, 11, 1481–1488. [Google Scholar] [CrossRef]
- Ramos, H.; de Almeida, A.B. Control of dynamic effects in small hydro with long hydraulic circuits. Int. J. Glob. Energy Issues 2005, 24, 47–58. [Google Scholar] [CrossRef]
- Products n.d. Available online: https://www.gunt.de/en/products/venturi-flume/070.16251/hm162-51/glct-1:pa-148:pr-701 (accessed on 4 October 2024).
- Li, G.; Zhang, J.; Wu, X.; Yu, X. Small-Signal Stability and Dynamic Behaviors of a Hydropower Plant with an Upstream Surge Tank Using Different PID Parameters. IEEE Access 2021, 9, 104837–104845. [Google Scholar] [CrossRef]
- Kadu, C.B.; Patil, C.Y. Design and Implementation of Stable PID Controller for Interacting Level Control System. Procedia Comput. Sci. 2016, 79, 737–746. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length (m) | 5 | Wall Thickness (m) | 0.008 |
| Width (m) | 0.309 | K (m1/3s−1) | 100 |
| Height (m) | 0.45 | Slope (%) | −0.5 to 2.5 |
| Q (m3/h) | ic |
|---|---|
| 60 | 75% |
| 70 | 64% |
| 80 | 56% |
| 90 | 50% |
| 100 | 45% |
| A (m) | T (s) | Kp | Ki | Kd | ξ | w (rad/s) | ϕ | dt (s) |
|---|---|---|---|---|---|---|---|---|
| 2 | 5 | 0.3 | 0.3 | 0.4 | 0.1 or other | 1.257 | 6 | 0.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tavares, M.; Pérez-Sánchez, M.; Coronado-Hernández, O.E.; Kuriqi, A.; Ramos, H.M. Defining and Mitigating Flow Instabilities in Open Channels Subjected to Hydropower Operation: Formulations and Experiments. Water 2024, 16, 3069. https://doi.org/10.3390/w16213069
Tavares M, Pérez-Sánchez M, Coronado-Hernández OE, Kuriqi A, Ramos HM. Defining and Mitigating Flow Instabilities in Open Channels Subjected to Hydropower Operation: Formulations and Experiments. Water. 2024; 16(21):3069. https://doi.org/10.3390/w16213069
Chicago/Turabian StyleTavares, Miguel, Modesto Pérez-Sánchez, Oscar E. Coronado-Hernández, Alban Kuriqi, and Helena M. Ramos. 2024. "Defining and Mitigating Flow Instabilities in Open Channels Subjected to Hydropower Operation: Formulations and Experiments" Water 16, no. 21: 3069. https://doi.org/10.3390/w16213069
APA StyleTavares, M., Pérez-Sánchez, M., Coronado-Hernández, O. E., Kuriqi, A., & Ramos, H. M. (2024). Defining and Mitigating Flow Instabilities in Open Channels Subjected to Hydropower Operation: Formulations and Experiments. Water, 16(21), 3069. https://doi.org/10.3390/w16213069