
An Enhanced Algorithm for Active Fire Detection in Croplands Using Landsat-8 OLI Data


Abstract
:1. Introduction
2. Materials and Methods
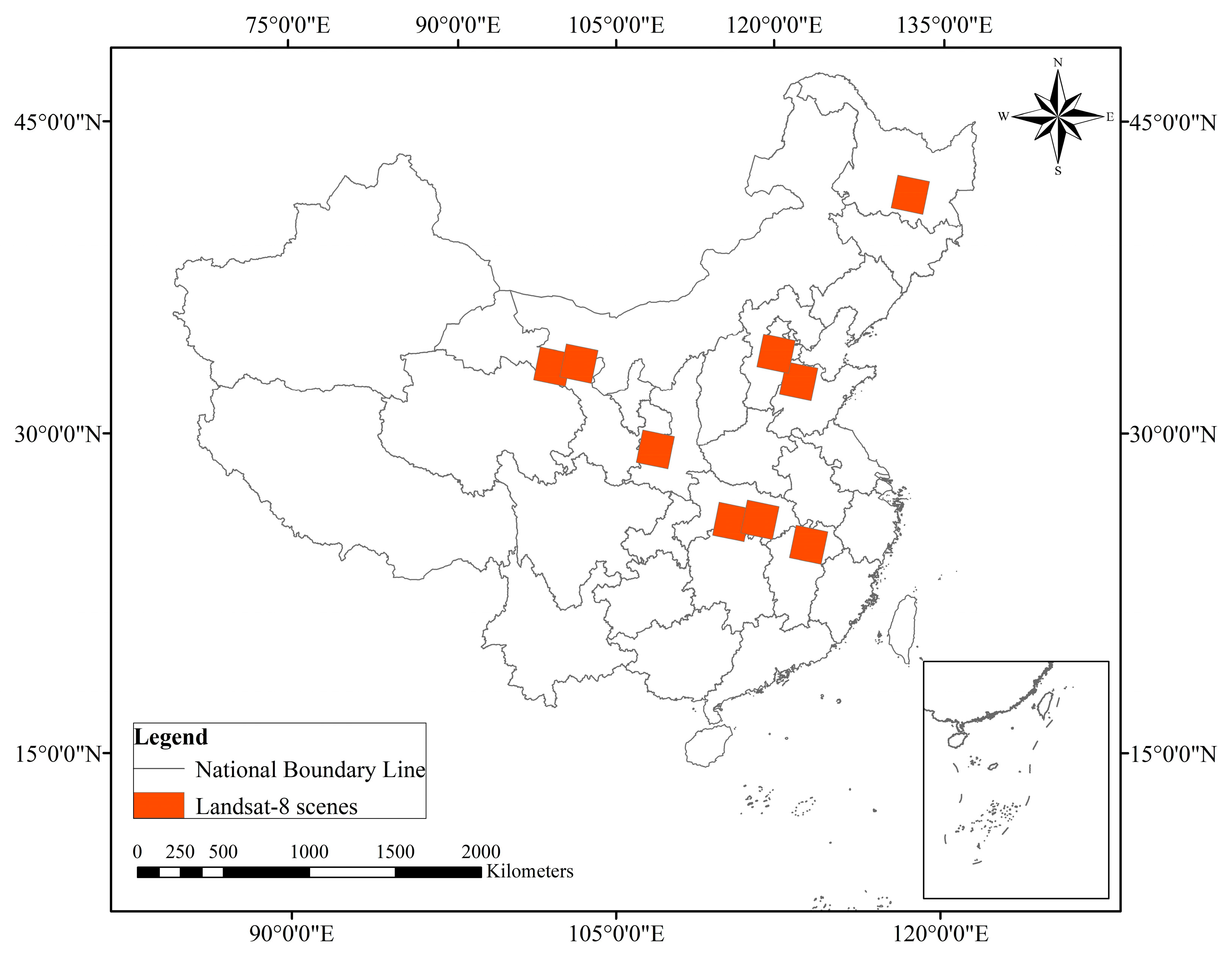
2.1. Study Areas
2.2. Data
2.2.1. Landsat-8 Images
2.2.2. Burning Fires and Non-Fire Datasets
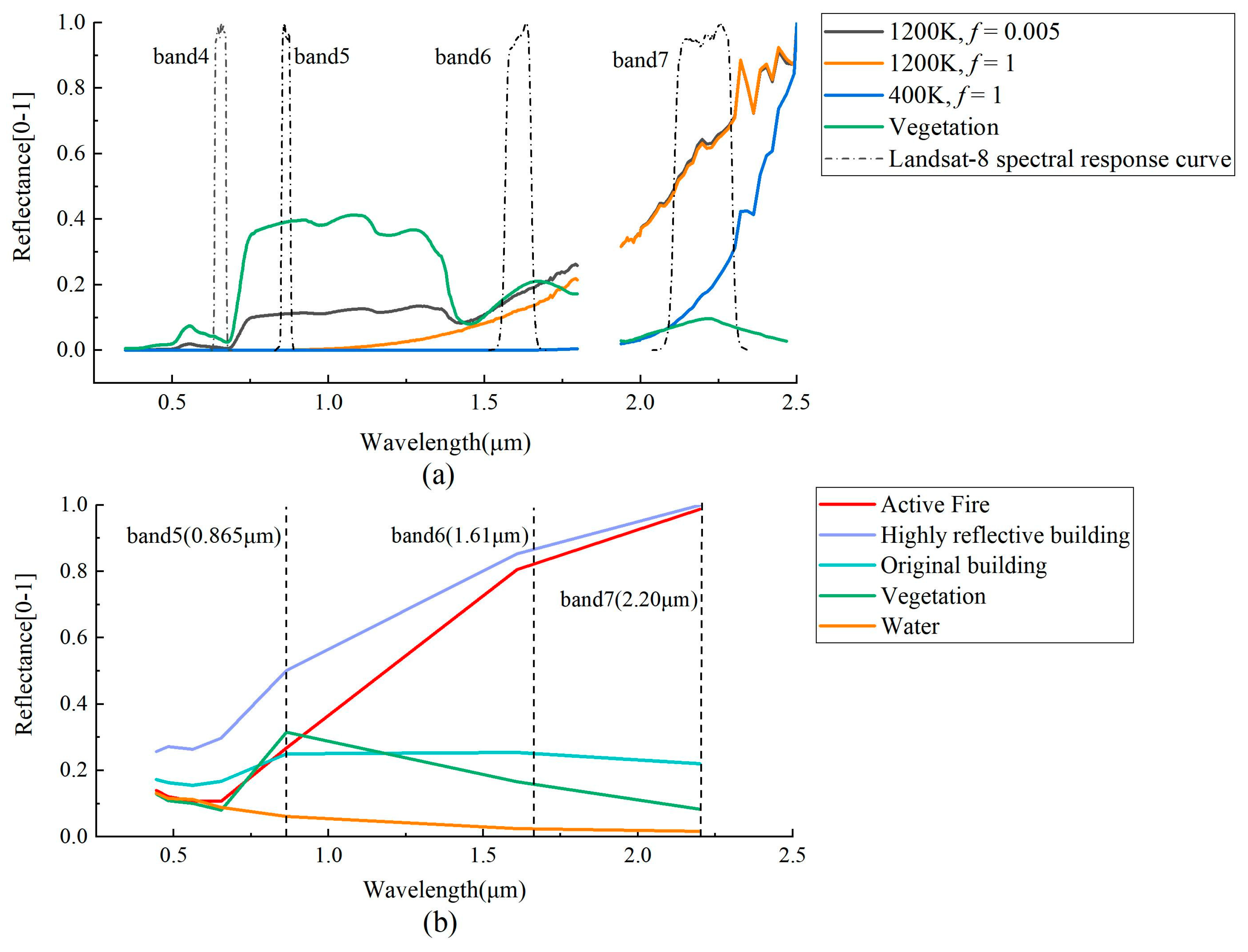
2.3. Spectral Analysis of Burning Fires
2.4. Methods
2.4.1. The SAFD Multicriteria Threshold Algorithm in the Context of Croplands
2.4.2. Constructing the Algorithm to Consider the Interference of Highly Reflective Buildings
2.4.3. Evaluation Metrics
3. Results
3.1. Specifying the Threshold of the Multicriteria SAFD Algorithm
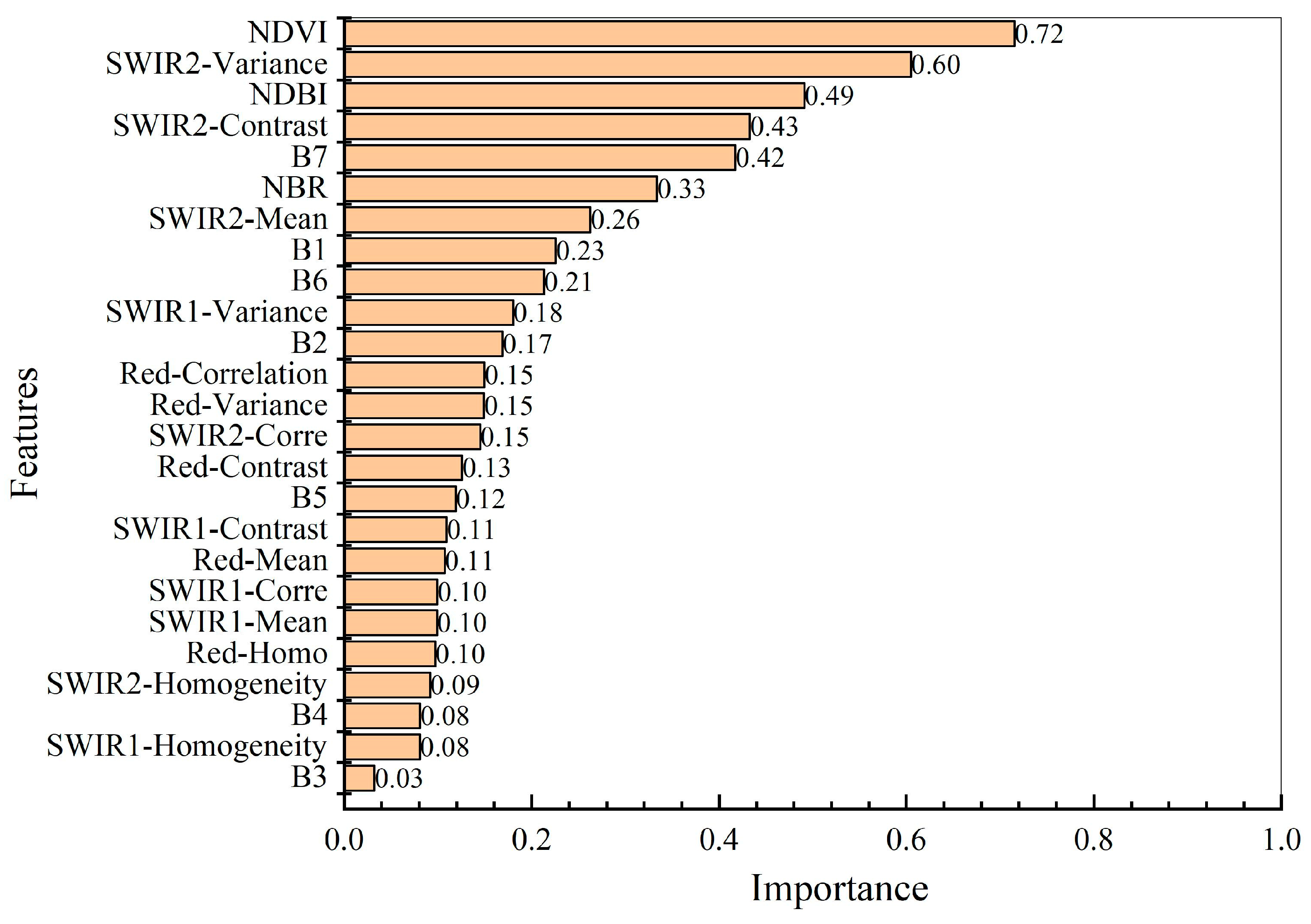
3.2. Selection of the Features’ Variables via the SAFD-LightGBM Model
3.3. Comparison of the SAFD and SAFD-LightGBM Algorithms
3.3.1. Analysis of the Results of Detecting Burning Fires
3.3.2. Accuracy Validation
4. Discussion
4.1. Comparison of Commission Errors in Different Regions
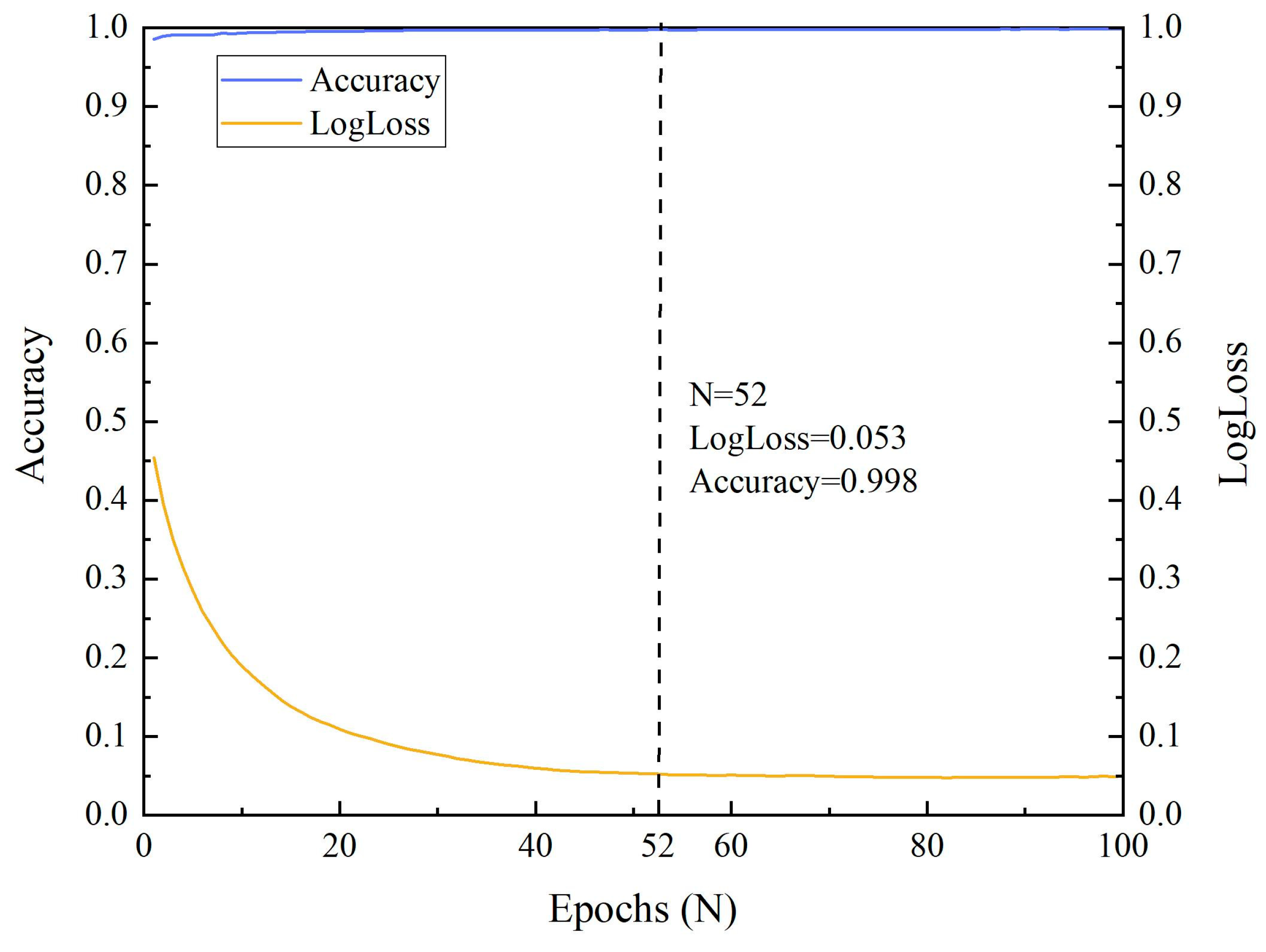
4.2. Influence of Hyperparameter Adjustment on the Model
4.3. Advantages and Limitations of the SAFD-LightGBM Algorithm
5. Conclusions
- Based on the statistical samples, a multicriteria threshold method was constructed to eliminate the background pixels of the cropland. Burning fires were then accurately extracted from the dataset of potential fires and other non-fires. It was found that the proposed improved threshold model was mainly influenced by the buildings around urban and rural areas, with detection precision of 71%.
- We used machine learning to accurately detect burning fires and found that the texture features of variance and contrast made a greater contribution to distinguishing fires from non-fires, and the precision of the algorithm in terms of the texture features was 86.8%. We ran the algorithm for different regions and found that the improved algorithm had the highest precision of 96.91% in summer–autumn dominant regions.
- For detecting small burning fires, in most regions, the majority of false fire pixels were linked to clusters of true fire pixels, suggesting that most false fire pixels occur along the ambiguous boundaries of fires. This phenomenon occurred more in northeastern China.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ayala-Carrillo, M.; Farfán, M.; Cárdenas-Nielsen, A.; Lemoine-Rodríguez, R. Are Wildfires in the Wildland-Urban Interface Increasing Temperatures? A Land Surface Temperature Assessment in a Semi-Arid Mexican City. Land 2022, 11, 2105. [Google Scholar] [CrossRef]
- Li, J.; Bo, Y.; Xie, S. Estimating Emissions from Crop Residue Open Burning in China Based on Statistics and MODIS Fire Products. J. Environ. Sci. 2016, 44, 158–170. [Google Scholar] [CrossRef] [PubMed]
- Frolking, S.; Xiao, X.; Zhuang, Y.; Salas, W.; Li, C. Agricultural Land-Use in China: A Comparison of Area Estimates from Ground-Based Census and Satellite-Borne Remote Sensing. Glob. Ecol. Biogeogr. 1999, 8, 407–416. [Google Scholar] [CrossRef] [Green Version]
- Xiao, X.; Liu, J.; Zhuang, D.; Frolking, S.; Boles, S.; Xu, B.; Liu, M.; Salas, W.; Moore, B., III; Li, C. Uncertainties in Estimates of Cropland Area in China: A Comparison between an AVHRR-Derived Dataset and a Landsat TM-Derived Dataset. Glob. Planet. Chang. 2003, 37, 297–306. [Google Scholar] [CrossRef]
- Streets, D.G.; Yarber, K.F.; Woo, J.-H.; Carmichael, G.R. Biomass Burning in Asia: Annual and Seasonal Estimates and Atmospheric Emissions. Glob. Biogeochem. Cycles 2003, 17, 1759–1768. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Song, Y.; Yao, H.; Kang, Y.; Li, M.; Huang, X.; Hu, M. Estimating Emissions from Agricultural Fires in the North China Plain Based on MODIS Fire Radiative Power. Atmos. Environ. 2015, 112, 326–334. [Google Scholar] [CrossRef]
- Zhang, H.; Hu, J.; Qi, Y.; Li, C.; Chen, J.; Wang, X.; He, J.; Wang, S.; Hao, J.; Zhang, L.; et al. Emission Characterization, Environmental Impact, and Control Measure of PM2.5 Emitted from Agricultural Crop Residue Burning in China. J. Clean. Prod. 2017, 149, 629–635. [Google Scholar] [CrossRef]
- Prins, E.M.; Menzel, W.P. Geostationary Satellite Detection of Bio Mass Burning in South America. Int. J. Remote Sens. 1992, 13, 2783–2799. [Google Scholar] [CrossRef]
- Elvidge, C.; Ziskin, D.; Baugh, K.; Tuttle, B.; Ghosh, T.; Pack, D.; Erwin, E.; Zhizhin, M. A Fifteen Year Record of Global Natural Gas Flaring Derived from Satellite Data. Energies 2009, 2, 595–622. [Google Scholar] [CrossRef] [Green Version]
- Böhme, C.; Bouwer, P.; Prinsloo, M.J. Real-Time Stream Processing for Active Fire Monitoring on Landsat 8 Direct Reception Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-7/W3, 765–770. [Google Scholar] [CrossRef] [Green Version]
- Jiang, L.; Du, W.; Yu, S. Estimation of Heat Released from Fire Based on Combustible Load in Inner Mongolian Grasslands. Land 2022, 11, 2099. [Google Scholar] [CrossRef]
- Elvidge, C.; Zhizhin, M.; Hsu, F.-C.; Baugh, K. VIIRS Nightfire: Satellite Pyrometry at Night. Remote Sens. 2013, 5, 4423–4449. [Google Scholar] [CrossRef] [Green Version]
- Giglio, L.; Schroeder, W.; Justice, C.O. The Collection 6 MODIS Active Fire Detection Algorithm and Fire Products. Remote Sens. Environ. 2016, 178, 31–41. [Google Scholar] [CrossRef] [Green Version]
- Stroppiana, D.; Pinnock, S.; Gregoire, J.-M. The Global Fire Product: Daily Fire Occurrence from April 1992 to December 1993 Derived from NOAA AVHRR Data. Int. J. Remote Sens. 2000, 21, 1279–1288. [Google Scholar] [CrossRef]
- Schroeder, W.; Oliva, P.; Giglio, L.; Csiszar, I.A. The New VIIRS 375 M Active Fire Detection Data Product: Algorithm Description and Initial Assessment. Remote Sens. Environ. 2014, 143, 85–96. [Google Scholar] [CrossRef]
- Wooster, M.J.; Xu, W.; Nightingale, T. Sentinel-3 SLSTR Active Fire Detection and FRP Product: Pre-Launch Algorithm Development and Performance Evaluation Using MODIS and ASTER Datasets. Remote Sens. Environ. 2012, 120, 236–254. [Google Scholar] [CrossRef]
- Giglio, L.; Descloitres, J.; Justice, C.O.; Kaufman, Y.J. An Enhanced Contextual Fire Detection Algorithm for MODIS. Remote Sens. Environ. 2003, 87, 273–282. [Google Scholar] [CrossRef]
- Wright, R.; Flynn, L.P.; Garbeil, H.; Harris, A.J.L.; Pilger, E. MODVOLC: Near-Real-Time Thermal Monitoring of Global Volcanism. J. Volcanol. Geotherm. Res. 2004, 135, 29–49. [Google Scholar] [CrossRef]
- Murphy, S.W.; de Souza Filho, C.R.; Wright, R.; Sabatino, G.; Correa Pabon, R. HOTMAP: Global Hot Target Detection at Moderate Spatial Resolution. Remote Sens. Environ. 2016, 177, 78–88. [Google Scholar] [CrossRef]
- USGS Landsat 8 Data Users Handbook. Available online: https://landsat.usgs.gov/documents/Landsat8DataUsersHandbook.pdf. (accessed on 27 November 2019).
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Hu, X.; Ban, Y.; Nascetti, A. Sentinel-2 MSI Data for Active Fire Detection in Major Fire-Prone Biomes: A Multi-Criteria Approach. Int. J. Appl. Earth Obs. Geoinf. 2021, 101, 102347. [Google Scholar] [CrossRef]
- Li, J.; Roy, D.P. A Global Analysis of Sentinel-2A, Sentinel-2B and Landsat-8 Data Revisit Intervals and Implications for Terrestrial Monitoring. Remote Sens. 2017, 9, 902. [Google Scholar] [CrossRef] [Green Version]
- Csiszar, I.A.; Schroeder, W. Short-Term Observations of the Temporal Development of Active Fires from Consecutive Same-Day ETM+ and ASTER Imagery in the Amazon: Implications for Active Fire Product Validation. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2008, 1, 248–253. [Google Scholar] [CrossRef]
- Giglio, L.; Csiszar, I.; Restás, Á.; Morisette, J.T.; Schroeder, W.; Morton, D.; Justice, C.O. Active Fire Detection and Characterization with the Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER). Remote Sens. Environ. 2008, 112, 3055–3063. [Google Scholar] [CrossRef]
- Kumar, S.S.; Roy, D.P. Global Operational Land Imager Landsat-8 Reflectance-Based Active Fire Detection Algorithm. Int. J. Digit. Earth 2017, 11, 154–178. [Google Scholar] [CrossRef] [Green Version]
- Schroeder, W.; Prins, E.; Giglio, L.; Csiszar, I.; Schmidt, C.; Morisette, J.; Morton, D. Validation of GOES and MODIS Active Fire Detection Products Using ASTER and ETM+ Data. Remote Sens. Environ. 2008, 112, 2711–2726. [Google Scholar] [CrossRef]
- Schroeder, W.; Oliva, P.; Giglio, L.; Quayle, B.; Lorenz, E.; Morelli, F. Active Fire Detection Using Landsat-8/OLI Data. Remote Sens. Environ. 2016, 185, 210–220. [Google Scholar] [CrossRef] [Green Version]
- De Almeida Pereira, G.H.; Fusioka, A.M.; Nassu, B.T.; Minetto, R. Active Fire Detection in Landsat-8 Imagery: A Large-Scale Dataset and a Deep-Learning Study. ISPRS J. Photogramm. Remote Sens. 2021, 178, 171–186. [Google Scholar] [CrossRef]
- Wooster, M.J.; Roberts, G.J.; Giglio, L.; Roy, D.; Freeborn, P.; Boschetti, L.; Justice, C.; Ichoku, C.; Schroeder, W.; Davies, D.; et al. Satellite Remote Sensing of Active Fires: History and Current Status, Applications and Future Requirements. Remote Sens. Environ. 2021, 267, 112694. [Google Scholar] [CrossRef]
- Rostami, A.; Shah-Hosseini, R.; Asgari, S.; Zarei, A.; Aghdami-Nia, M.; Homayouni, S. Active Fire Detection from Landsat-8 Imagery Using Deep Multiple Kernel Learning. Remote Sens. 2022, 14, 992. [Google Scholar] [CrossRef]
- Corradino, C.; Amato, E.; Torrisi, F.; Del Negro, C. Data-Driven Random Forest Models for Detecting Volcanic Hot Spots in Sentinel-2 MSI Images. Remote Sens. 2022, 14, 4370. [Google Scholar] [CrossRef]
- Huang, Y.F.; Xu, J.; Li, Z.H.; Zhang, J. A Fire Detection Algorithm Based on Machine Learning. Sci. Surv. Mapping 2020, 45, 64–70. [Google Scholar] [CrossRef]
- Mateo-García, G.; Laparra, V.; López-Puigdollers, D.; Gómez-Chova, L. Transferring Deep Learning Models for Cloud Detection between Landsat-8 and Proba-V. ISPRS J. Photogramm. Remote Sens. 2020, 160, 1–17. [Google Scholar] [CrossRef]
- Chen, J.; Li, C.; Ristovski, Z.; Milic, A.; Gu, Y.; Islam, M.S.; Wang, S.; Hao, J.; Zhang, H.; He, C.; et al. A Review of Biomass Burning: Emissions and Impacts on Air Quality, Health and Climate in China. Sci. Total Environ. 2017, 579, 1000–1034. [Google Scholar] [CrossRef] [Green Version]
- Roy, D.P.; Wulder, M.A.; Loveland, T.R.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Helder, D.; Irons, J.R.; Johnson, D.M.; Kennedy, R.; et al. Landsat-8: Science and Product Vision for Terrestrial Global Change Research. Remote Sens. Environ. 2014, 145, 154–172. [Google Scholar] [CrossRef] [Green Version]
- Elvidge, C.D.; Zhizhin, M.; Hsu, F.-C.; Baugh, K.; Khomarudin, M.R.; Vetrita, Y.; Sofan, P.; Suwarsono; Hilman, D. Long-Wave Infrared Identification of Smoldering Peat Fires in Indonesia with Nighttime Landsat Data. Environ. Res. Lett. 2015, 10, 065002. [Google Scholar] [CrossRef] [Green Version]
- Waigl, C.F.; Prakash, A.; Stuefer, M.; Verbyla, D.; Dennison, P. Fire Detection and Temperature Retrieval Using EO-1 Hyperion Data over Selected Alaskan Boreal Forest Fires. Int. J. Appl. Earth Obs. Geoinf. 2019, 81, 72–84. [Google Scholar] [CrossRef]
- Kato, S.; Miyamoto, H.; Amici, S.; Oda, A.; Matsushita, H.; Nakamura, R. Automated Classification of Heat Sources Detected Using SWIR Remote Sensing. Int. J. Appl. Earth Obs. Geoinf. 2021, 103, 102491. [Google Scholar] [CrossRef]
- Sánchez Sánchez, Y.; Martínez Graña, A.; Santos-Francés, F. Remote Sensing Calculation of the Influence of Wildfire on Erosion in High Mountain Areas. Agronomy 2021, 11, 1459. [Google Scholar] [CrossRef]
- Stankova, N.; Nedkov, R. Monitoring Forest Regrowth with Different Burn Ssverity Using Aerial and Landsat Data. IEEE Int. Geosci. Remote Sens. Symp. 2015, 6, 26–31. [Google Scholar]
- Adhikari, A.; Garg, R.D.; Pundir, S.K.; Singhal, A. Delineation of Agricultural Fields in Arid Regions from Worldview-2 Datasets Based on Image Textural Properties. Env. Monit. Assess. 2023, 195, 605. [Google Scholar] [CrossRef] [PubMed]
- Li, K.; Wang, B. DAR-Net: Dense Attentional Residual Network for Vehicle Detection in Aerial Images. Computation. Intell. Neurosci. 2021, 2021, 19. [Google Scholar] [CrossRef] [PubMed]
- Santi, E.; Clarizia, M.P.; Comite, D.; Dente, L.; Guerriero, L.; Pierdicca, N. Detecting Fire Disturbances in Forests by Using GNSS Reflectometry and Machine Learning: A Case Study in Angola. Remote Sens. Environ. 2022, 270, 112878. [Google Scholar] [CrossRef]
- Michael, Y.; Helman, D.; Glickman, O.; Gabay, D.; Brenner, S.; Lensky, I.M. Forecasting Fire Risk with Machine Learning and Dynamic Information Derived from Satellite Vegetation Index Time-Series. Sci. Total Environ. 2021, 764, 142844. [Google Scholar] [CrossRef]
- Wu, J.; Kong, S.; Wu, F.; Cheng, Y.; Zheng, S.; Yan, Q.; Zheng, H.; Yang, G.; Zheng, M.; Liu, D.; et al. Estimating the Open Biomass Burning Emissions in Central and Eastern China from 2003 to 2015 Based on Satellite Observation. Atmos. Chem. Phys. 2018, 18, 11623–11646. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Sun, B.; Xiao, Y.; Xiao, R.; Wei, Y. Feature Augmentation for Imbalanced Classification with Conditional Mixture WGANs. Signal Process. Image Commun. 2019, 75, 89–99. [Google Scholar] [CrossRef]
- Liu, Y.; Zhi, W.; Xu, B.; Xu, W.; Wu, W. Detecting High-Temperature Anomalies from Sentinel-2 MSI Images. ISPRS J. Photogramm. Remote Sens. 2021, 177, 175–193. [Google Scholar] [CrossRef]
- Zhang, Q.; Ge, L.; Zhang, R.; Metternicht, G.I.; Liu, C.; Du, Z. Towards a Deep-Learning-Based Framework of Sentinel-2 Imagery for Automated Active Fire Detection. Remote Sens. 2021, 13, 4790. [Google Scholar] [CrossRef]
- Palacios, A.; Muñoz, M.; Darbra, R.; Casal, J. Thermal Radiation from Vertical Jet Fires. Fire Saf. J. 2012, 51, 93–101. [Google Scholar] [CrossRef]
- Lasaponara, R.; Abate, N.; Fattore, C.; Aromando, A.; Cardettini, G.; Fonzo, M.D. On the Use of Sentinel-2 NDVI Time Series and Google Earth Engine to Detect Land-Use/Land-Cover Changes in Fire-Affected Areas. Remote Sens. 2022, 14, 4723. [Google Scholar] [CrossRef]
- Nolè, A.; Rita, A.; Spatola, M.F.; Borghetti, M. Biogeographic Variability in Wildfire Severity and Post-Fire Vegetation Recovery across the European Forests via Remote Sensing-Derived Spectral Metrics. Sci. Total Environ. 2022, 823, 153807. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dominant Type | WRS | Image Acquisition Date | Areas | Usage |
|---|---|---|---|---|
| Spring–autumn dominant | 124/39 | 11 May 2016 | Southeast | Training and testing |
| 123/39 | 1 March 2016 | Central | Training and testing | |
| 121/40 | 3 March 2016 | Southeast | Validation | |
| Autumn–winter dominant | 123/33 | 15 November 2017 | North | Training and testing |
| 122/34 | 13 December 2018 | North | Training and testing | |
| 117/28 | 2 November 2016 | Northeast | Validation | |
| Summer–autumn dominant | 132/33 | 29 October 2017 | Northwest | Training and testing |
| 133/33 | 20 October 2017 | Northwest | Training and testing | |
| 128/36 | 13 July 2018 | Northwest | Validation |
| Type of Data | Name | Number of Samples |
|---|---|---|
| Active fire dataset | Burning fires | 480 |
| Non-fire dataset | Highly reflective buildings | 1220 |
| Cropland vegetation | 1712 | |
| Water bodies | 50 | |
| Ordinary buildings | 50 | |
| Total | 3512 | |
| Feature | Description | Formula | Total |
|---|---|---|---|
| Landsat-8 Imagery bands | Landsat-8 Bands 1–7 | - | 7 |
| Spectral index | Normalized difference building index (NDBI) | 3 | |
| Normalized difference vegetation index (NDVI) | |||
| Normalized burned ratio (NBR) | |||
| Texture features (Band 4, Band 6, Band 7) | Mean | 15 | |
| Correlation | |||
| Contrast | |||
| Homogeneity | |||
| Variance | |||
| Total | 25 | ||
| Reference Data | |||
|---|---|---|---|
| Active Fires | Non-Fires | ||
| Classified data | Active fires | TP | FP |
| Non-fires | FN | TN | |
| Algorithm | CE (%) | OE (%) | P | F |
|---|---|---|---|---|
| SAFD multicriteria algorithm | 29.0% | 8.9% | 71.0% | 79.8 |
| SAFD-LightGBM algorithm | 13.2% | 11.5% | 86.8% | 87.6 |
| Name | Implication | Value Range | Interval |
|---|---|---|---|
| learning_rate | learning rate | [0.1, 1] | 0.05 |
| n_estimators | number of decision trees | [10, 250] | 10 |
| num_leaves | maximum number of leaves | [10, 100] | 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Y.; Kong, J.; Zhong, Y.; Zhang, Q.; Zhang, J. An Enhanced Algorithm for Active Fire Detection in Croplands Using Landsat-8 OLI Data. Land 2023, 12, 1246. https://doi.org/10.3390/land12061246
Jiang Y, Kong J, Zhong Y, Zhang Q, Zhang J. An Enhanced Algorithm for Active Fire Detection in Croplands Using Landsat-8 OLI Data. Land. 2023; 12(6):1246. https://doi.org/10.3390/land12061246
Chicago/Turabian StyleJiang, Yizhu, Jinling Kong, Yanling Zhong, Qiutong Zhang, and Jingya Zhang. 2023. "An Enhanced Algorithm for Active Fire Detection in Croplands Using Landsat-8 OLI Data" Land 12, no. 6: 1246. https://doi.org/10.3390/land12061246
APA StyleJiang, Y., Kong, J., Zhong, Y., Zhang, Q., & Zhang, J. (2023). An Enhanced Algorithm for Active Fire Detection in Croplands Using Landsat-8 OLI Data. Land, 12(6), 1246. https://doi.org/10.3390/land12061246