Theoretical Analysis of Empirical Mode Decomposition


Abstract
:1. Introduction
2. Theoretical Principle of Oscillation Signal Decomposition
2.1. Theoretical Principle
2.2. Basic Steps
- (1)
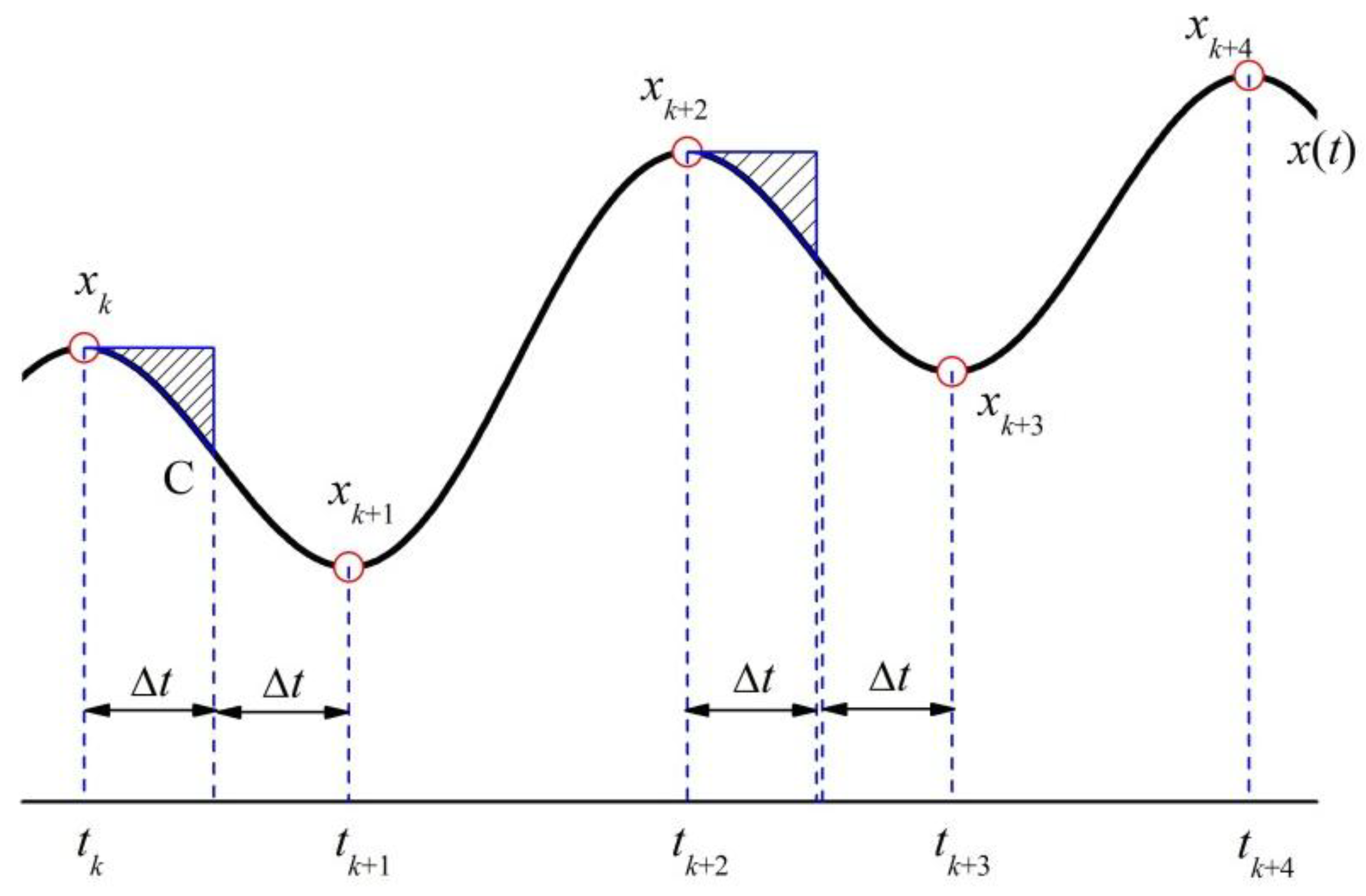
- Consider an oscillation signal x(t) varying with time t and take the piece of this signal as a signal analyzed. Assuming that this signal is composed of a pure oscillation component c(t) of proper rotation, with mean zero and a residual term (the trend or the baseline signal) r(t), Equation (1) follows.
- (2)
- Since c(t) integral in the interval of two local maxima (or minima) points tk and tk + 2 should be equal to zero. Equation (1) can be transformed into Equation (2).
- (3)
- According to the Lagrange differential theorem of mean, it is known that there is at least one point tl between tk and tk + 2 to make Equation (3). Thus, Equation (2) can be rewritten as Equation (4).It can be derived that there is a point tm between tk + 1 and tk + 3 to make Equation (5).
- (4)
- Choosing a point C located at the central point from tk to tk + 1, it can derive new relations from Equations (4) and (5). Equations (6) and (7) follow.
- (5)
- Where ∆t = (tk + 1 − tk)/2.
- (6)
- With consideration of these approximate relations from Equations (8) to (11), after simplifying, this yields Equation (12).
- (7)
- In Equation (12), the term on the left-hand side is approximate to the differential of r(t) with respect to time t, and the first and the second terms on the right-hand side. To the differential of the curve xmax(t) between two local maxima and that of the curve xmin(t) between two local minima. With due regard to the behavior of r(t), xmax(t), and xmin(t) uniformly varying with time over the interval [tk, tk + 3], one has Equation (13).
- (8)
- Finally, the component as in Equation (14) is obtained.
3. Characteristics of EMD Algorithm
- (1)
- The successive extrema of x(t) are firstly identified, then the local maxima are connected by a cubic spline as the upper envelope, and the local minima are similarly connected as the lower envelope.
- (2)
- These two envelopes are used to calculate the mean as a function of time designated as m1(t).
- (3)
- The difference h1(t) between the signal x(t) and the mean m1(t) is calculated by the relation h1(t) = x(t) − m1(t), which can be regarded as the primary description of the first IMF.
- (4)
- To determine the first IMF more accurately, h1(t) is treated as a new signal, its upper and lower envelopes, and their new mean m2(t) are calculated, and a new difference h2(t) = h1(t) − m2(t) is determined. This h2(t) is again treated as a new signal, and the process, referred to as iteration, is repeated many times designated by k until a stopping criterion satisfies. hk(t) is the first IMF, designated by H1(t).
- (5)
- The first residue d1(t) = x(t) − H1(t) is analyzed by the same steps (1)–(4) to obtain the second IMF H2(t). This sifting process continues until the last residue shows no apparent variation.
3.1. Primary Description of the First IMF
3.2. Iteration and Sifting Process
4. Analysis and Discussion
4.1. Interpolation
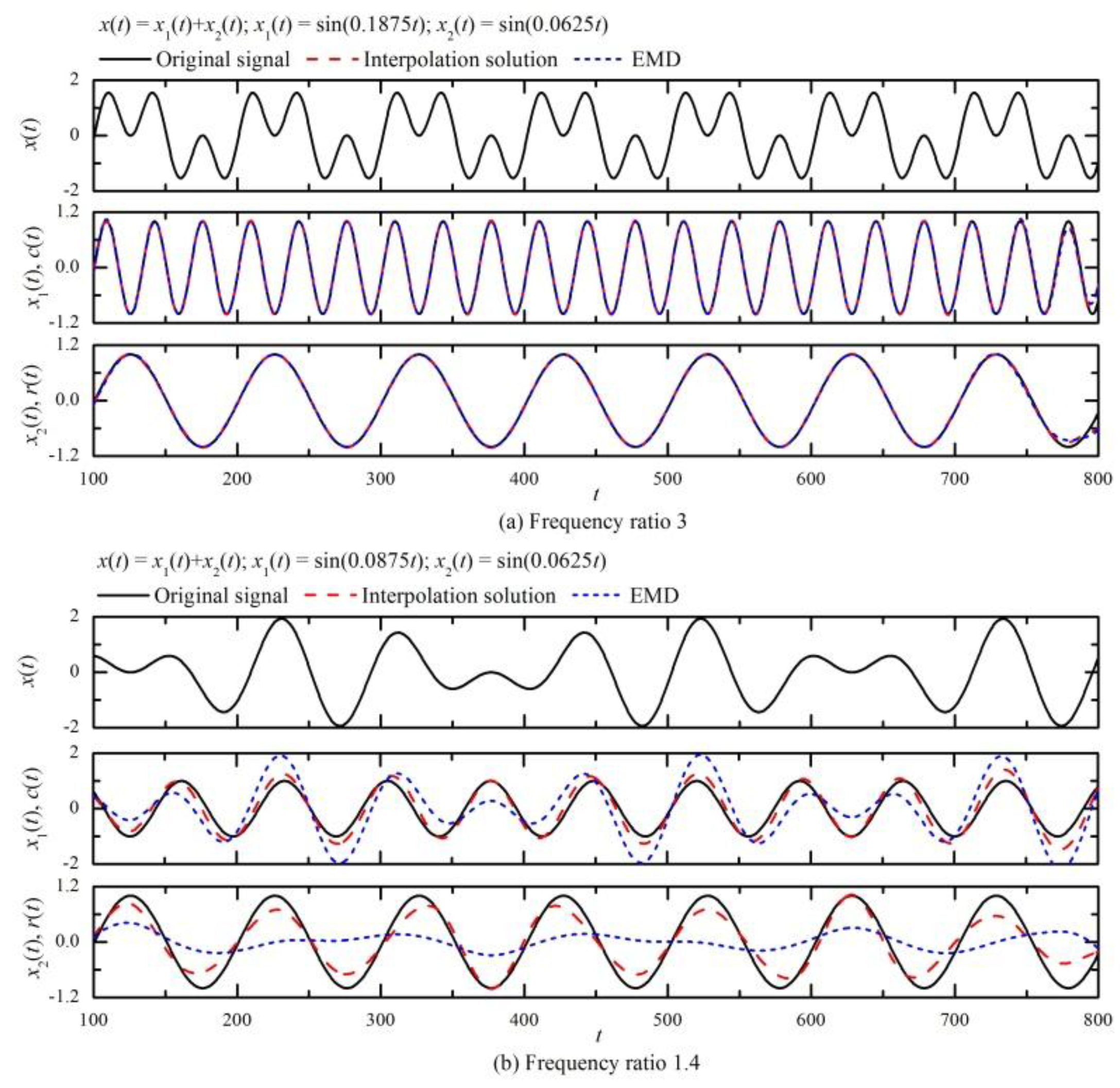
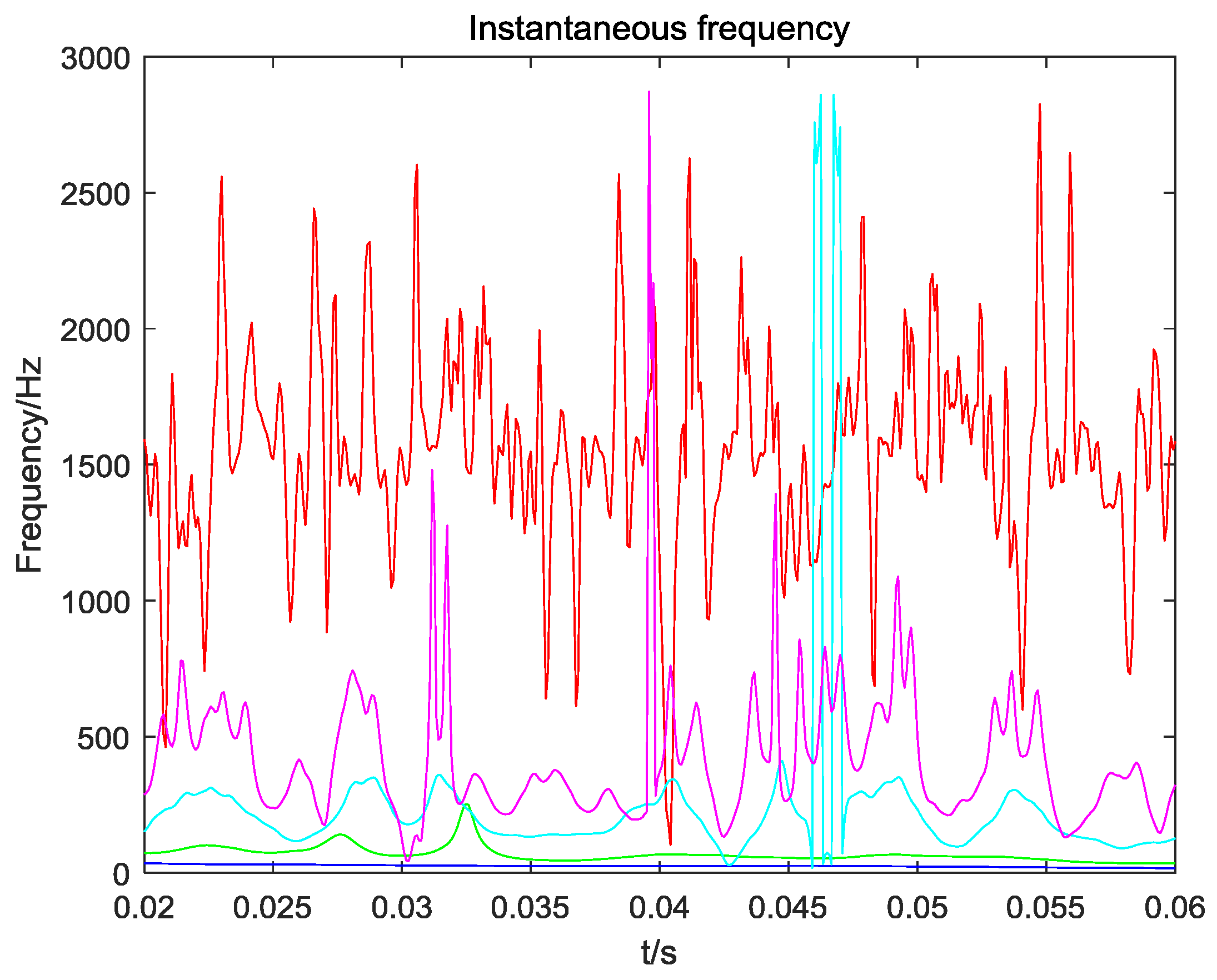
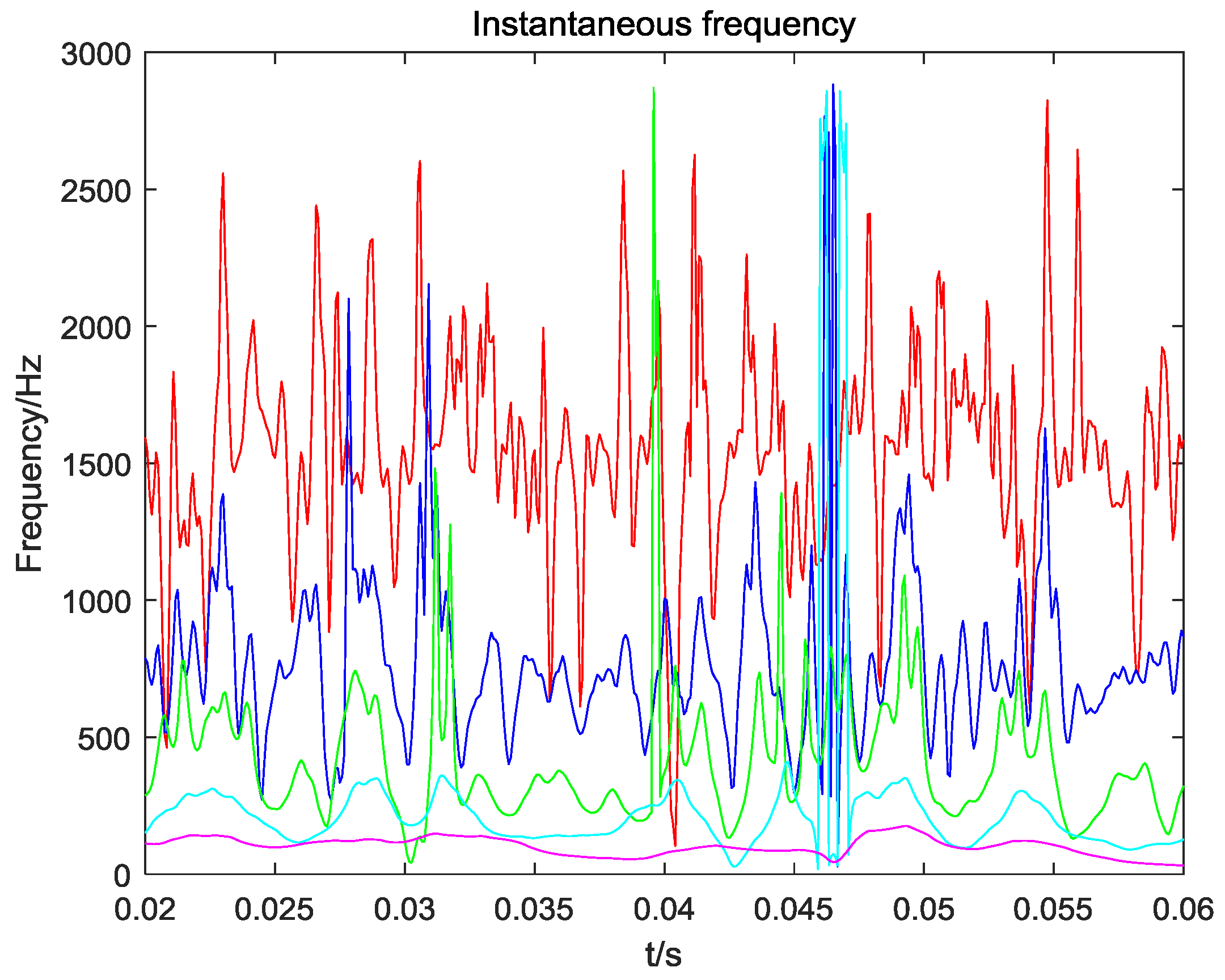
4.2. Frequency Resolving Ability
4.3. Assumption and Approximation in the Theoretical Principle
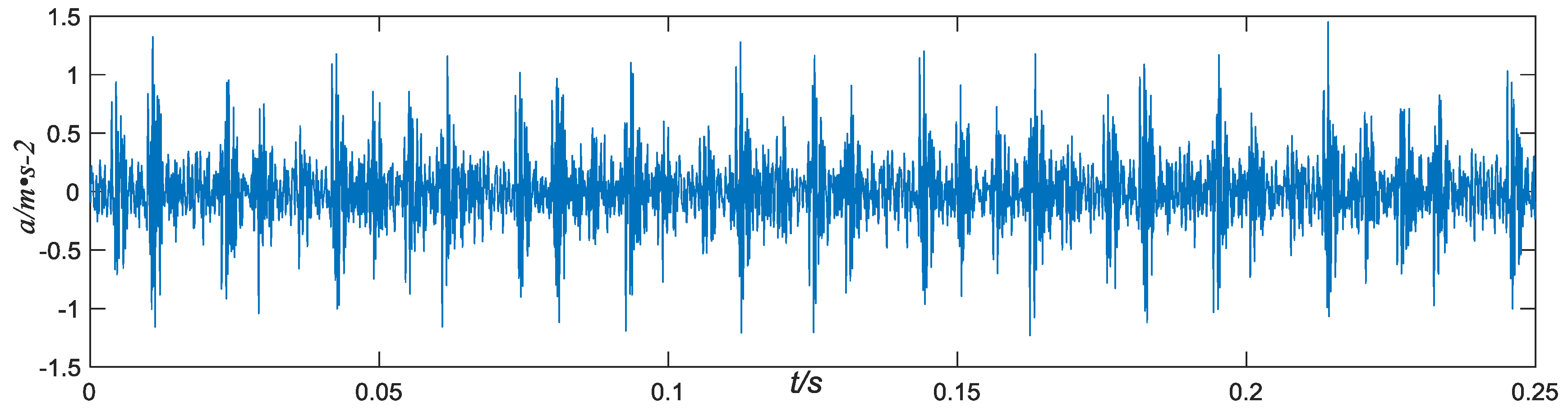
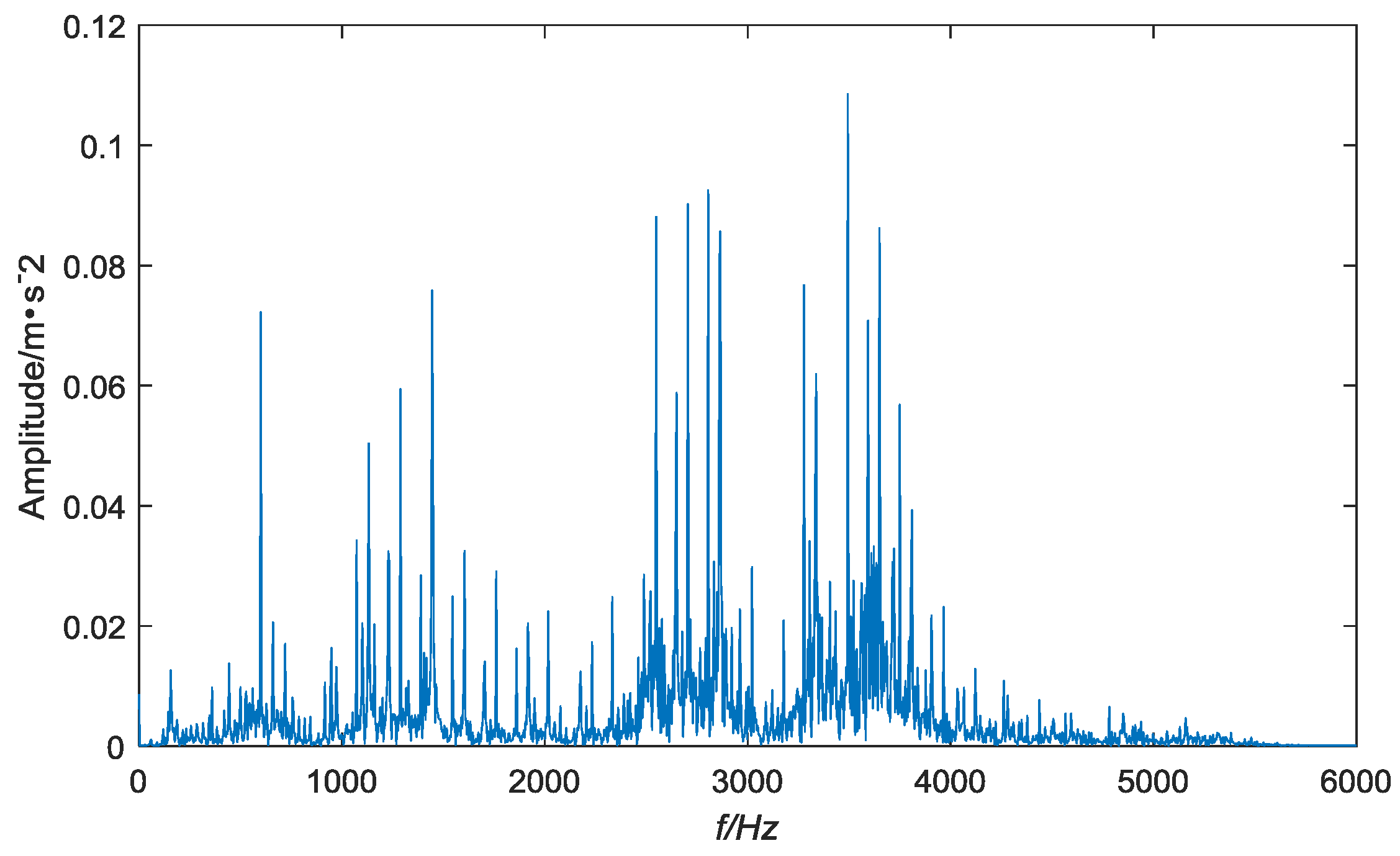
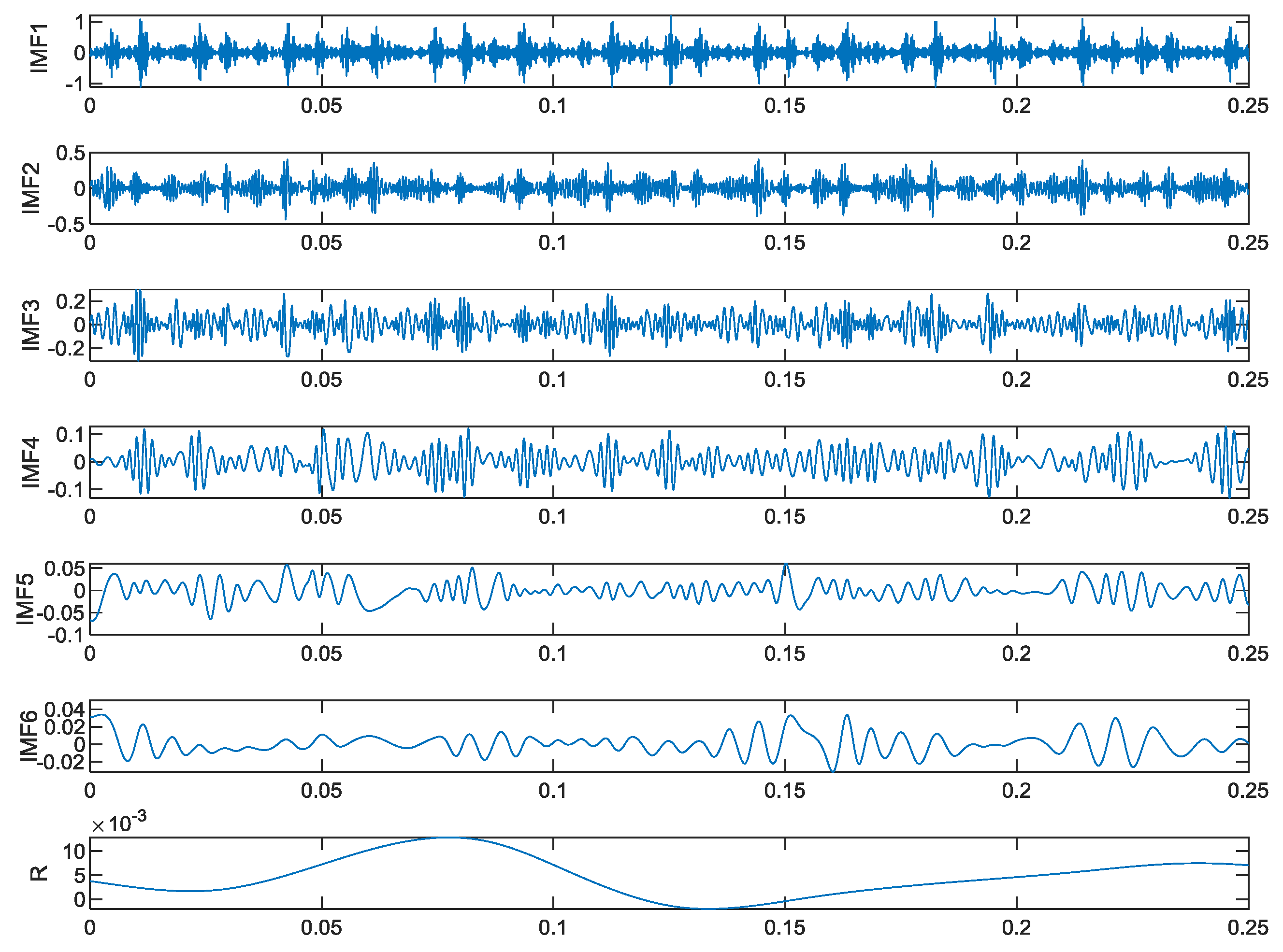
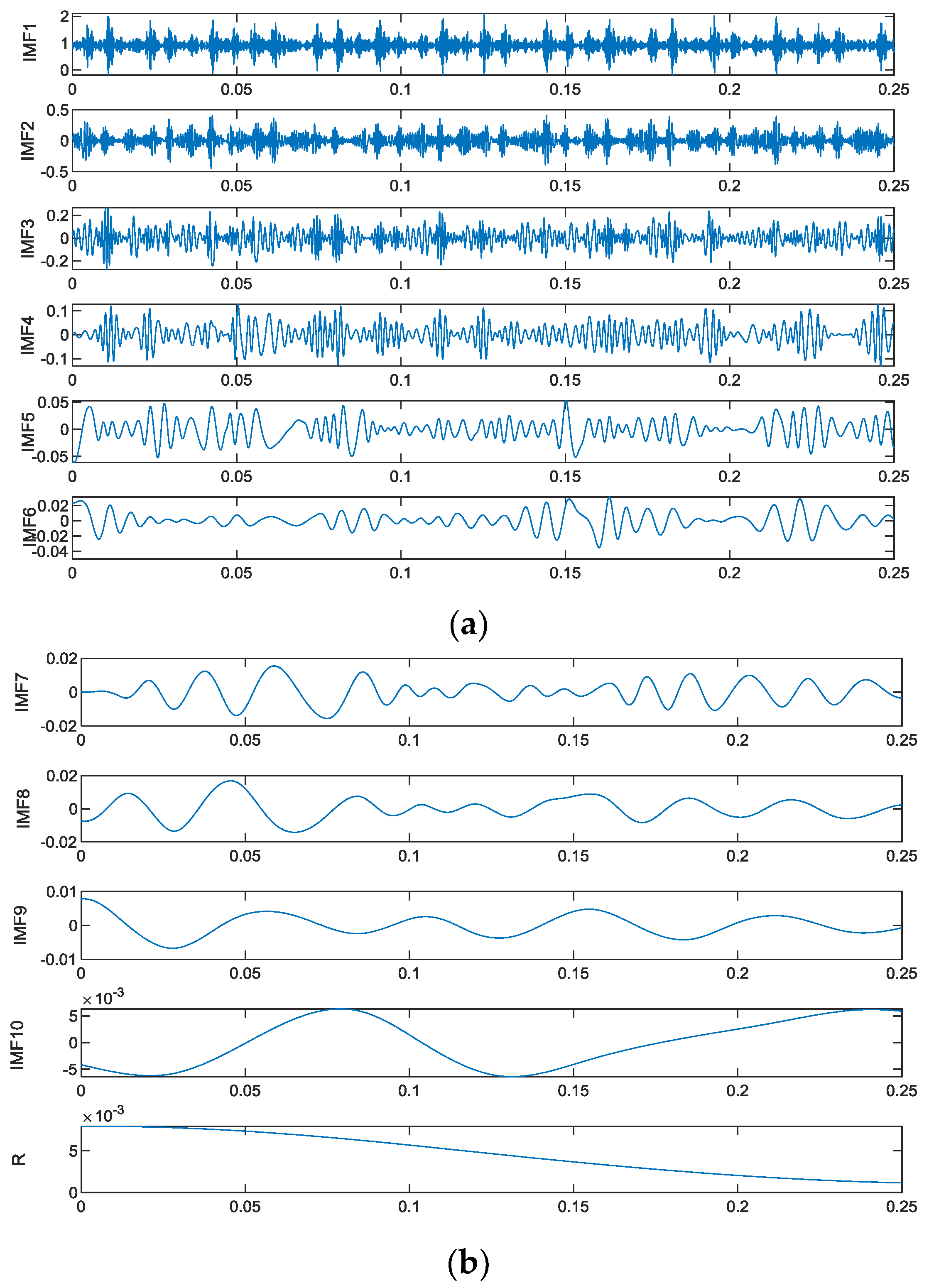
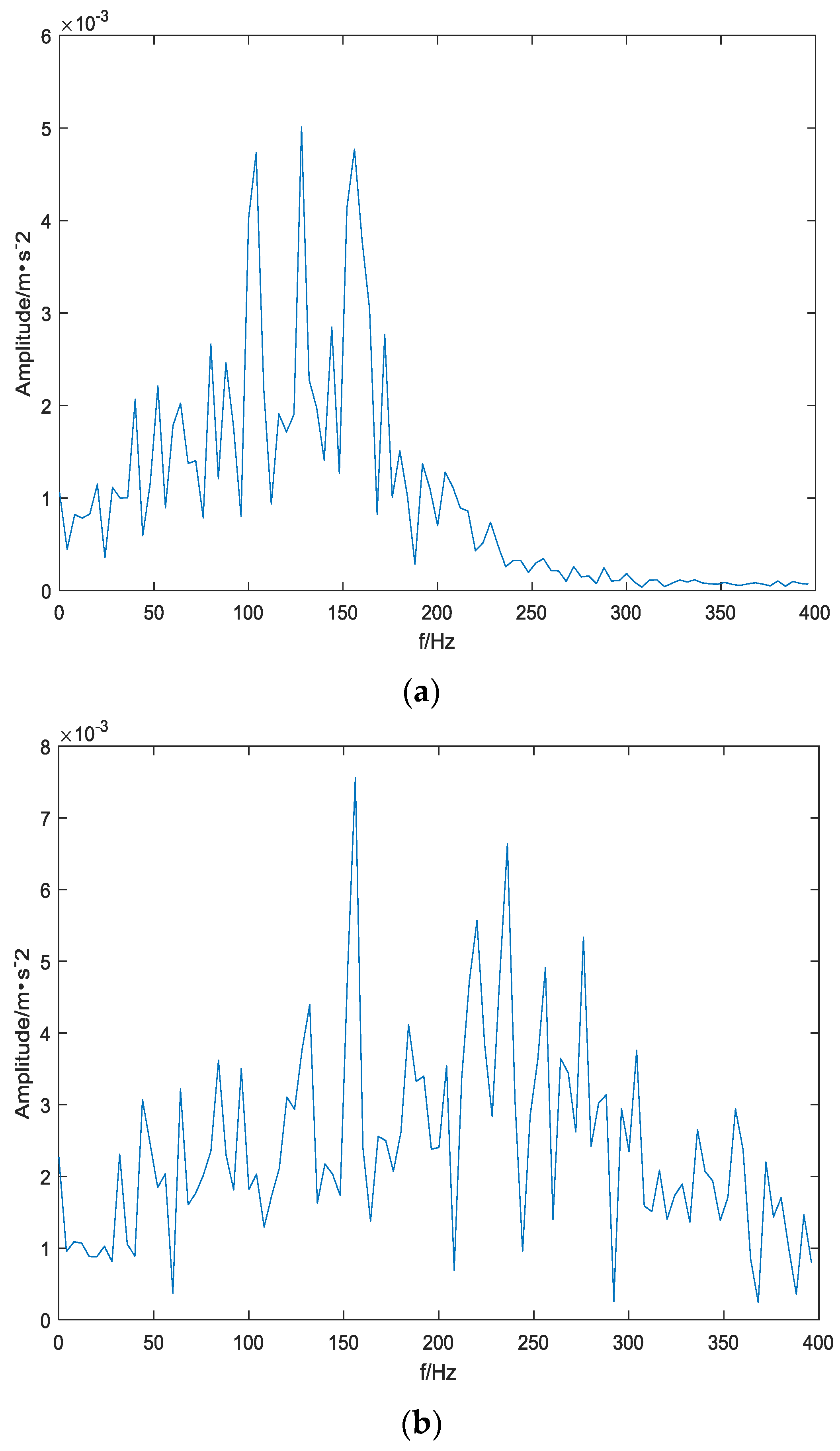
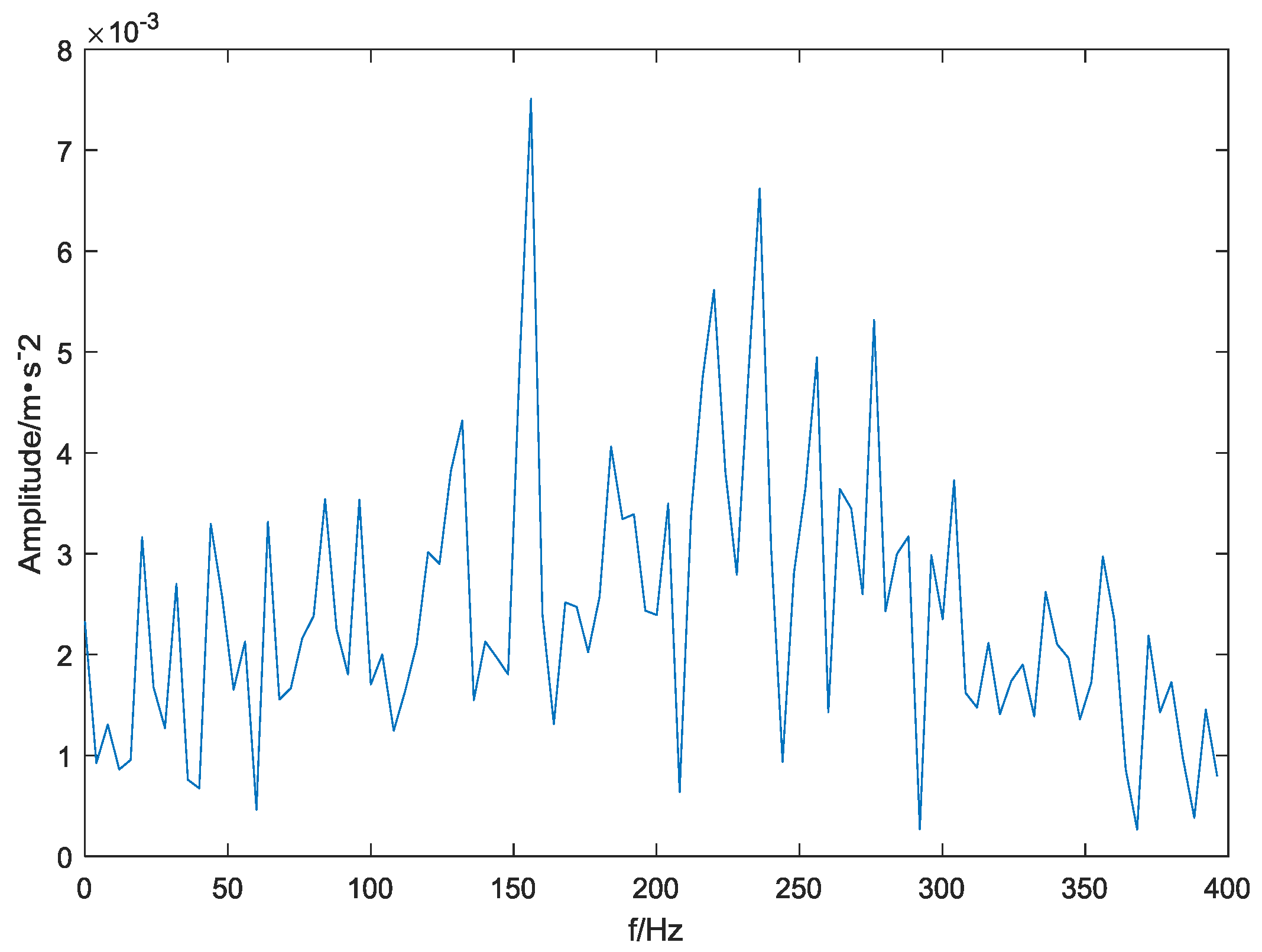
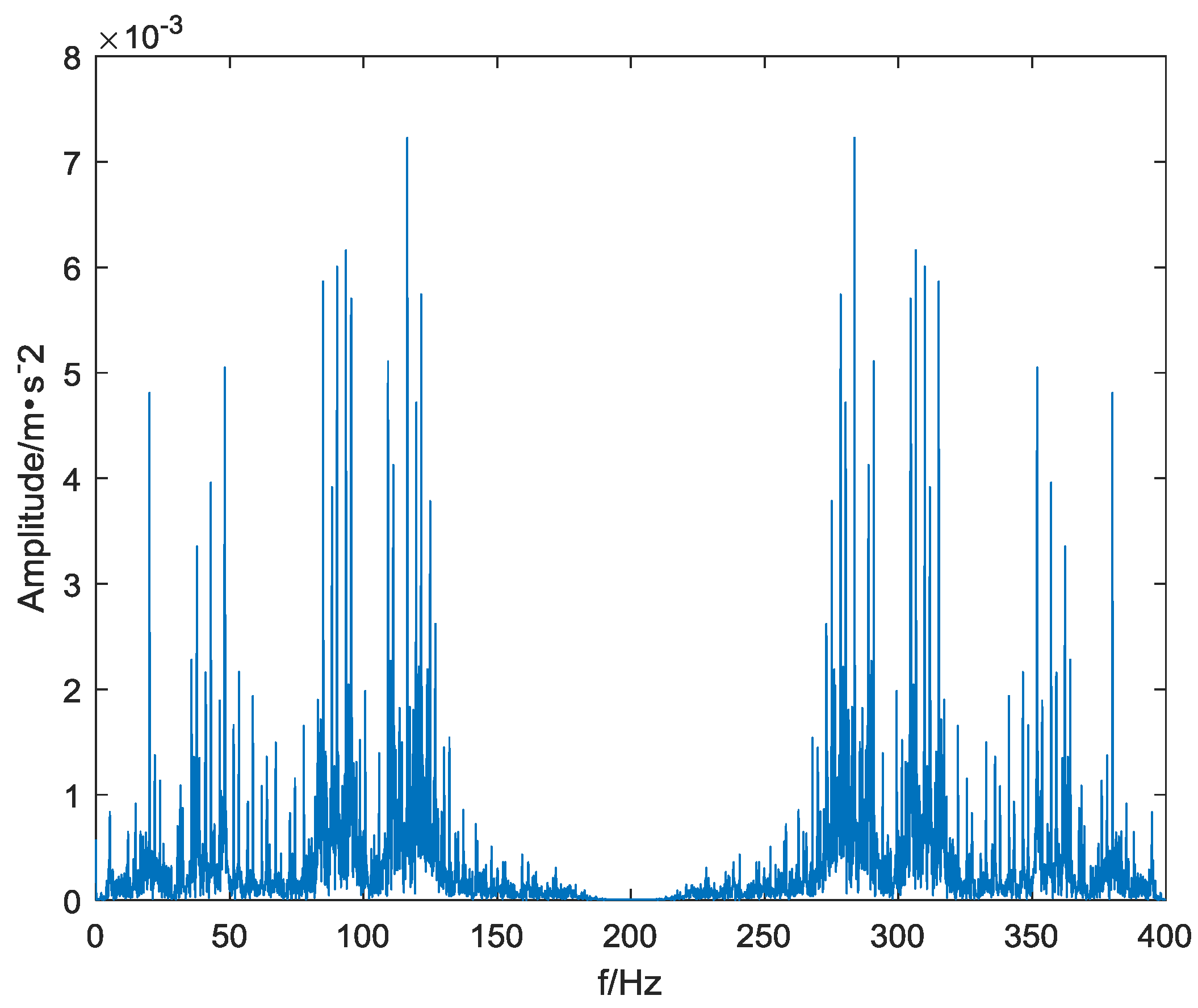
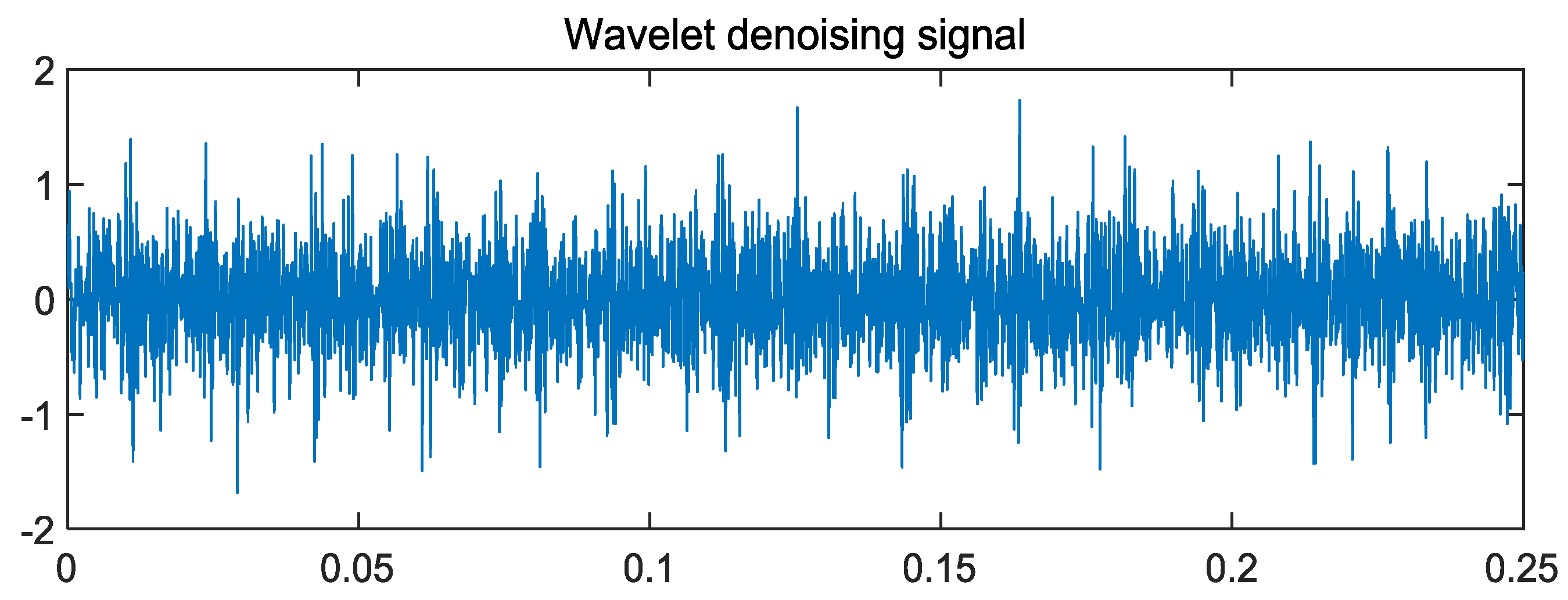
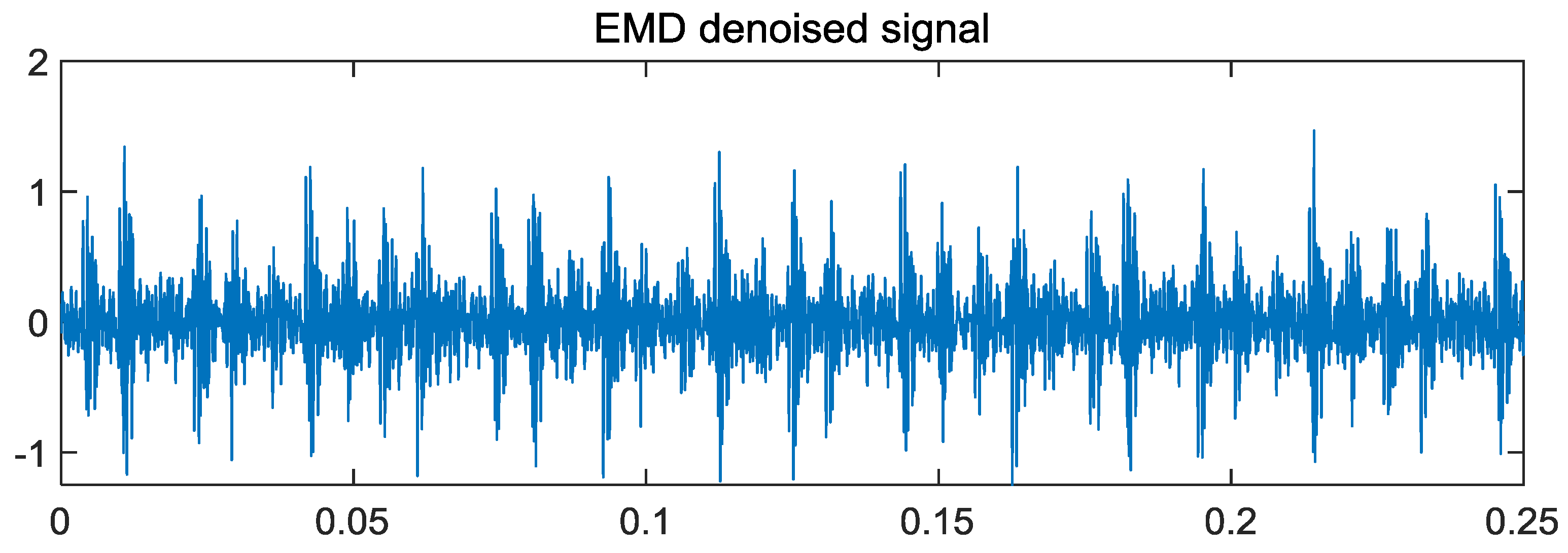
4.4. Bearing Fault Data Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.L.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. A 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Rilling, G.; Flandrin, P.; Goncalves, P. On empirical mode decomposition and its algorithms. In Proceedings of the IEEE-EURASIP Workshop on Nonlinear Signal and Image Processing NSIP-03, Grado, Italy, 8–11 June 2003. [Google Scholar]
- Lee, Y.S.; Tsakirtzis, S.; Vakakis, A.F.; Bergman, L.A.; McFarlan, D.M. Physics-based foundation for empirical mode decomposition. AIAA J. 2009, 47, 2938–2963. [Google Scholar] [CrossRef]
- Feldman, M. Hilbert transform in vibration analysis. Mech. Syst. Signal Process. 2011, 25, 735–802. [Google Scholar] [CrossRef]
- Yang, J.N.; Lei, Y.; Pan, S.; Huang, N.H. System identification of linear structures based on Hilbert-Huang spectral analysis, part 1: Normal modes. Earthq. Eng. Struct. Dyn. 2003, 32, 1443–1467. [Google Scholar] [CrossRef]
- Yang, J.N.; Lei, Y.; Pan, S.; Huang, N.H. System identification of linear structures based on Hilbert-Huang spectral analysis, part 2: Complex modes. Earthq. Eng. Struct. Dyn. 2003, 32, 1533–1554. [Google Scholar] [CrossRef]
- Pai, P.F. Time–frequency characterization of nonlinear normal modes and challenges in nonlinearity identification of dynamical systems. Mech. Syst. Signal Process. 2011, 25, 2358–2374. [Google Scholar] [CrossRef]
- Lee, Y.S.; Vakakis, A.F.; McFarland, D.M.; Bergman, L.A. A global-local approach to nonlinear system identification: A review. Struct. Control Health Monit. 2010, 17, 742–760. [Google Scholar] [CrossRef]
- Li, H.; Deng, X.; Dai, H. Structural damage detection using the combination method of EMD and wavelet analysis. Mech. Syst. Signal Process. 2007, 21, 298–306. [Google Scholar] [CrossRef]
- Liu, B.; Riemenschneider, S.; Xu, Y. Gearbox fault diagnosis using empirical mode decomposition and Hilbert spectrum. Mech. Syst. Signal Process. 2006, 20, 718–734. [Google Scholar] [CrossRef]
- Gao, Q.; Duan, C.; Fan, H.; Meng, Q. Rotating machine fault diagnosis using empirical mode decomposition. Mech. Syst. Signal Process. 2008, 22, 1072–1081. [Google Scholar] [CrossRef]
- Ricci, R.; Pennacchi, P. Diagnostics of gear faults based on EMD and automatic selection of intrinsic mode functions. Mech. Syst. Signal Process. 2011, 25, 821–838. [Google Scholar] [CrossRef] [Green Version]
- Kopsinis, Y.; McLaughlin, S. Investigation and performance enhancement of the empirical mode decomposition method based on a heuristic search optimization approach. IEEE Trans. Signal Process. 2008, 56, 1–13. [Google Scholar] [CrossRef]
- Deléchelle, E.; Lemoine, J.; Niang, O. Empirical mode decomposition: An analytical approach for sifting process. IEEE Signal Process. Lett. 2005, 12, 764–767. [Google Scholar] [CrossRef]
- Niang, O.; Deléchelle, E.; Lemoine, J. A spectral approach for sifting process in empirical mode decomposition. IEEE Trans. Signal Process. 2010, 58, 5612–5623. [Google Scholar] [CrossRef]
- Rilling, G.; Flandrin, P. One or two frequencies? The empirical mode decomposition answers. IEEE Trans. Signal Process. 2008, 56, 85–95. [Google Scholar] [CrossRef]
- Feldman, M. Analytical basics of the EMD: Two harmonics decomposition. Mech. Syst. Signal Process. 2009, 23, 2059–2071. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R. A new review of nonlinear water waves: The Hilbert spectrum. Ann. Rev. Fluid Mech. 1999, 31, 417–457. [Google Scholar] [CrossRef]
- Smith, J.S. The local mean decomposition and its application to EEG perception data. J. R. Soc. Interface 2005, 2, 443–454. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hong, H.; Wang, X.; Tao, Z. Local integral mean-based sifting for empirical mode decomposition. IEEE Signal Process. Lett. 2009, 16, 841–844. [Google Scholar] [CrossRef]
- Li, C.; Wang, X.; Tao, Z.; Wang, Q.; Du, S. Extraction of time varying information from noisy signals: An approach based on the empirical mode decomposition. Mech. Syst. Signal Process. 2011, 25, 812–820. [Google Scholar] [CrossRef]
- Hawley, S.D.; Atlas, L.E.; Chizeck, H.J. Some properties of an empirical mode type signal decomposition algorithm. IEEE Signal Process. Lett. 2010, 17, 24–27. [Google Scholar] [CrossRef]
- Xu, Z.; Huang, B.; Li, K. An alternative envelope approach for empirical mode decomposition. Digit. Signal Process. 2010, 20, 77–84. [Google Scholar] [CrossRef]
- Datig, M.; Schlurmann, T. Performance and limitations of the Hilbert-Huang transformation (HHT) with an application to irregular water waves. Ocean Eng. 2004, 31, 1783–1834. [Google Scholar] [CrossRef]
- Case Western Reserve University Data Center. Available online: https://csegroups.case.edu/bearingdatacenter/home (accessed on 9 November 2018).
- Dang, Z.; Lv, Y.; Li, Y.; Wei, G. Improved Dynamic Mode Decomposition and Its Application to Fault Diagnosis of Rolling Bearing. Sensors 2018, 18, 1972. [Google Scholar] [CrossRef] [PubMed]
- Pang, B.; Tang, G.; Tian, T.; Zhou, C. Rolling Bearing Fault Diagnosis Based on an Improved HTT Transform. Sensors 2018, 18, 1203. [Google Scholar] [CrossRef] [PubMed]
- Wan, S.; Zhang, X. Teager Energy Entropy Ratio of Wavelet Packet Transform and Its Application in Bearing Fault Diagnosis. Entropy 2018, 20, 388. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method Type | SNR | RMSE |
|---|---|---|
| Wavelet method | 18.69 | 0.19 |
| EMD method | 21.12 | 0.13 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, H.; Chen, G.; Yu, H.; Chen, H.; An, F. Theoretical Analysis of Empirical Mode Decomposition. Symmetry 2018, 10, 623. https://doi.org/10.3390/sym10110623
Ge H, Chen G, Yu H, Chen H, An F. Theoretical Analysis of Empirical Mode Decomposition. Symmetry. 2018; 10(11):623. https://doi.org/10.3390/sym10110623
Chicago/Turabian StyleGe, Hengqing, Guibin Chen, Haichun Yu, Huabao Chen, and Fengping An. 2018. "Theoretical Analysis of Empirical Mode Decomposition" Symmetry 10, no. 11: 623. https://doi.org/10.3390/sym10110623
APA StyleGe, H., Chen, G., Yu, H., Chen, H., & An, F. (2018). Theoretical Analysis of Empirical Mode Decomposition. Symmetry, 10(11), 623. https://doi.org/10.3390/sym10110623