Hybrid Sensor Network-Based Indoor Surveillance System for Intrusion Detection



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Works
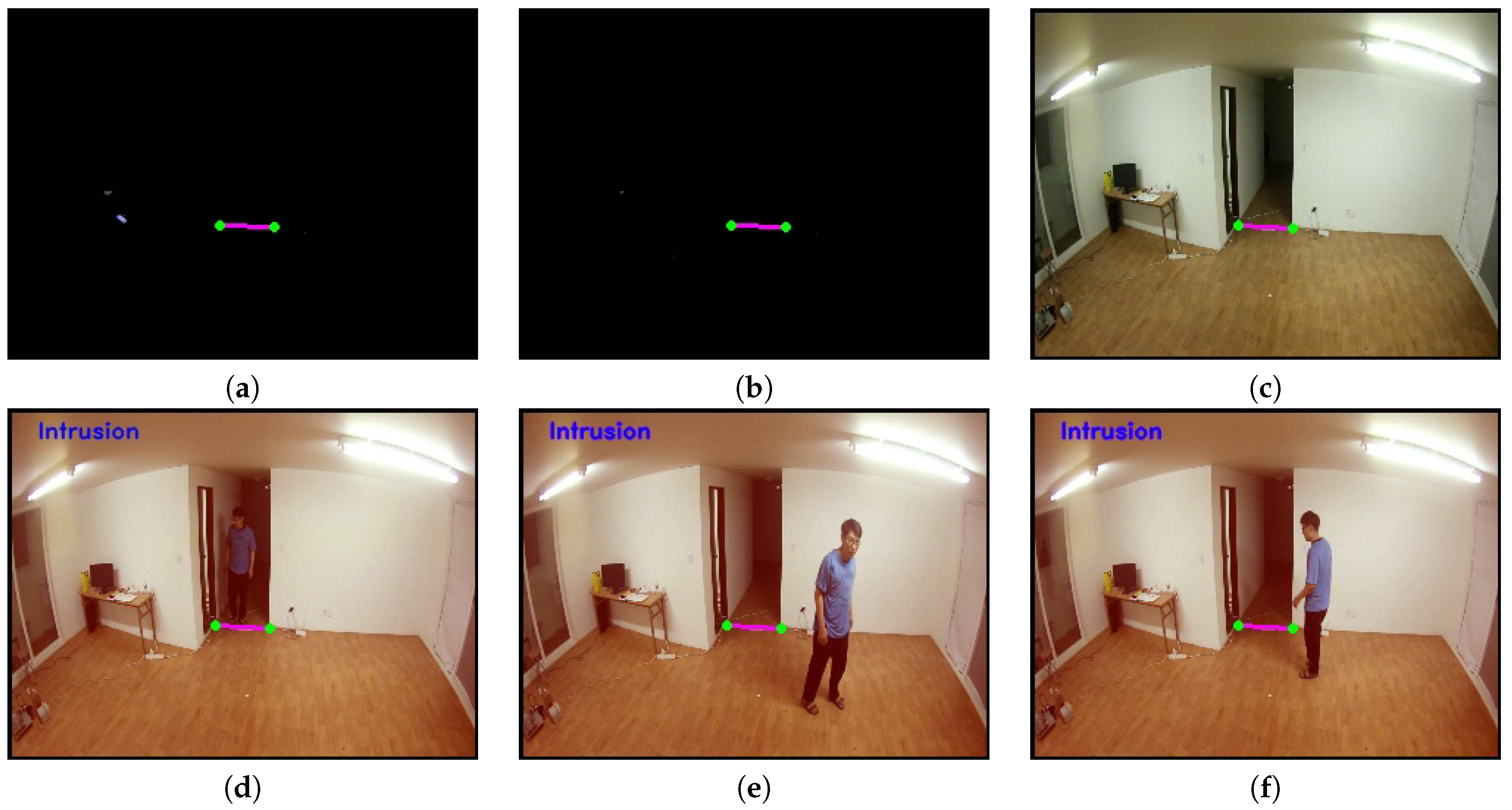
3. Image Sensor-Based Intrusion Detection
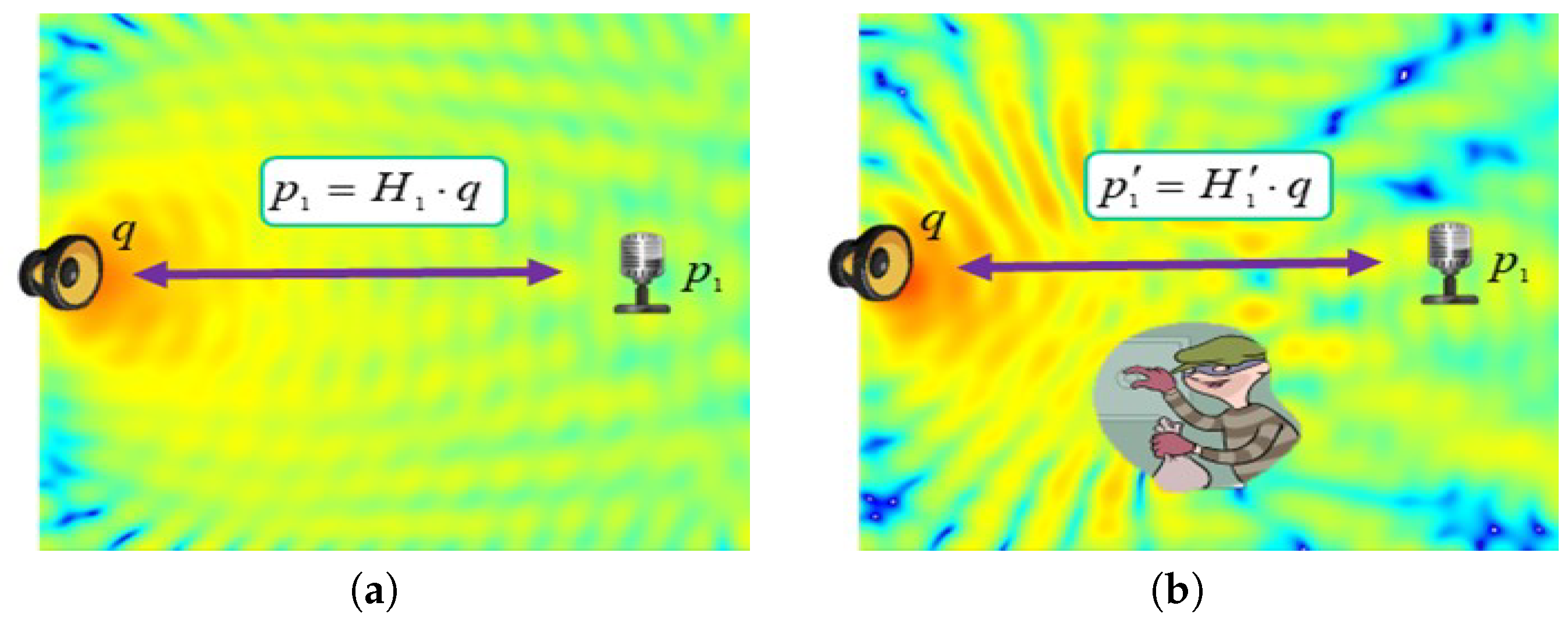
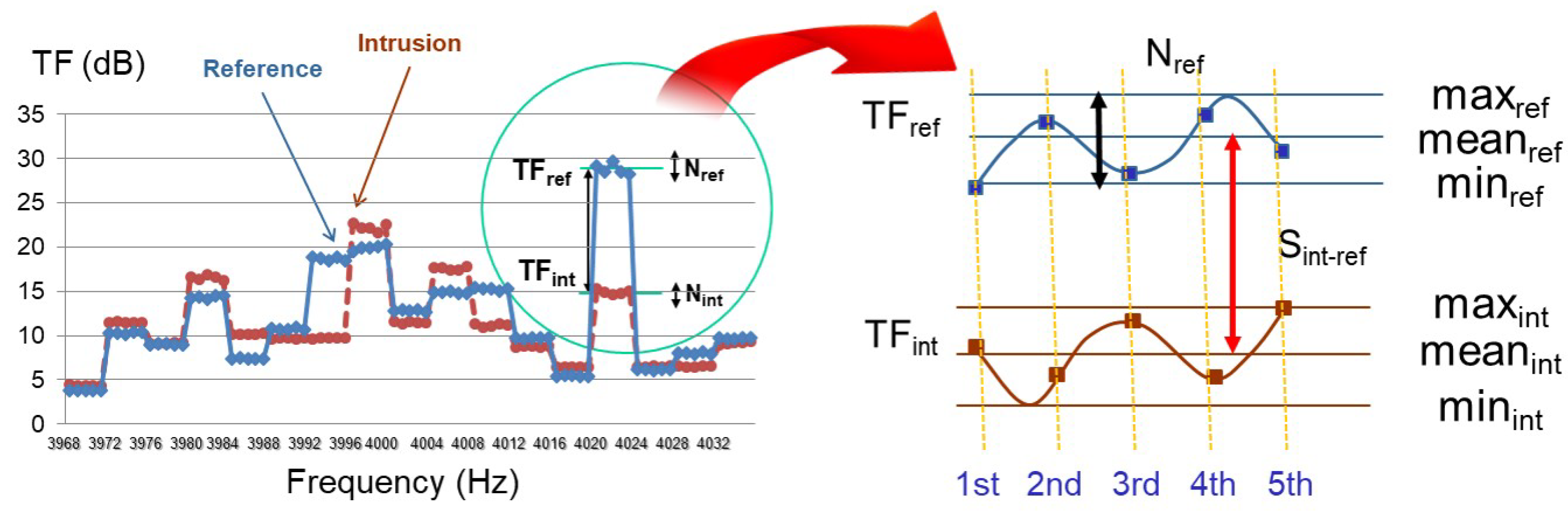
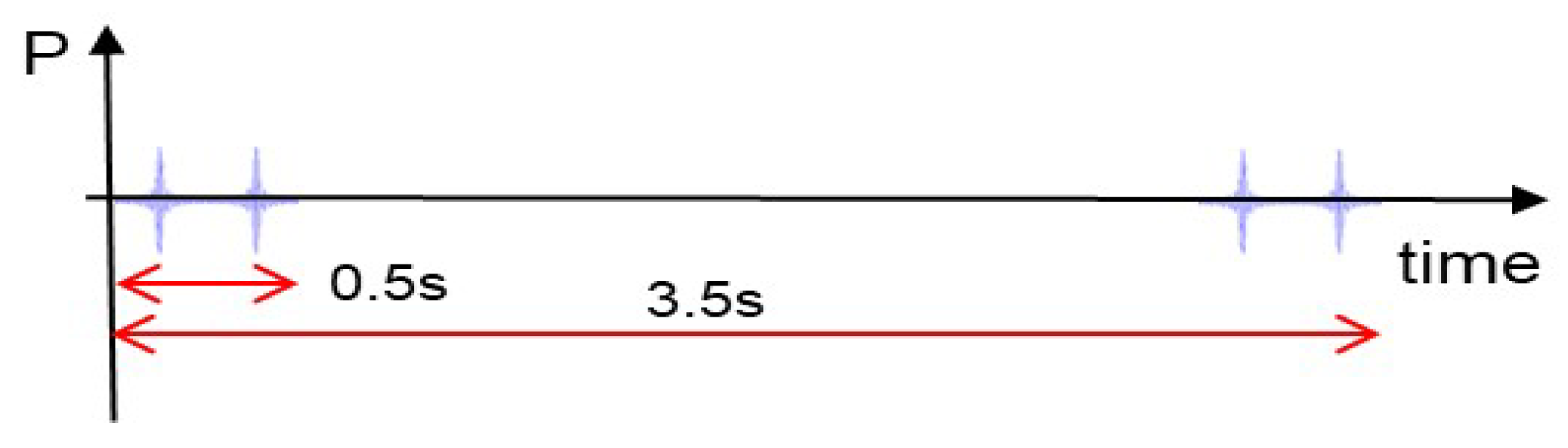
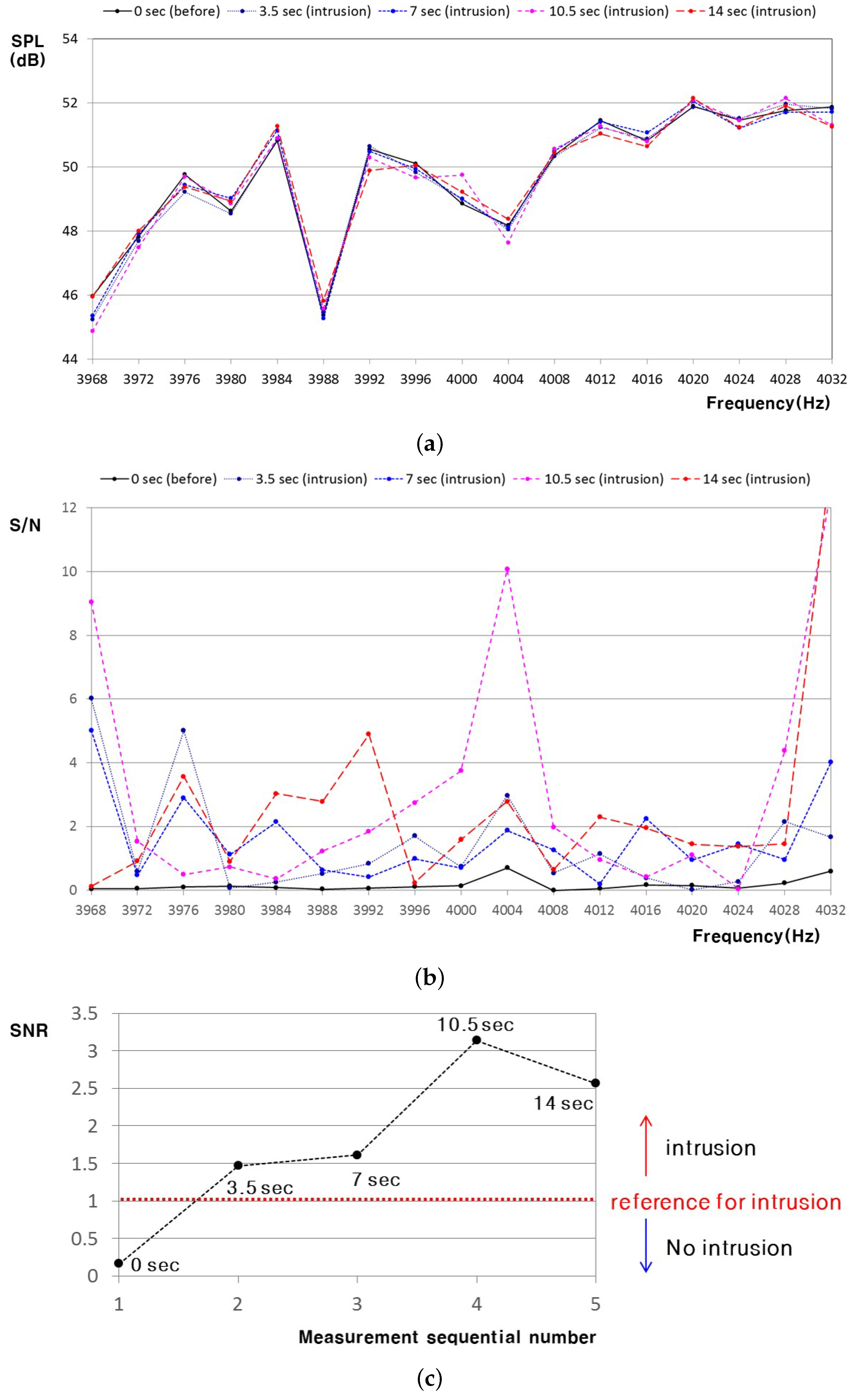
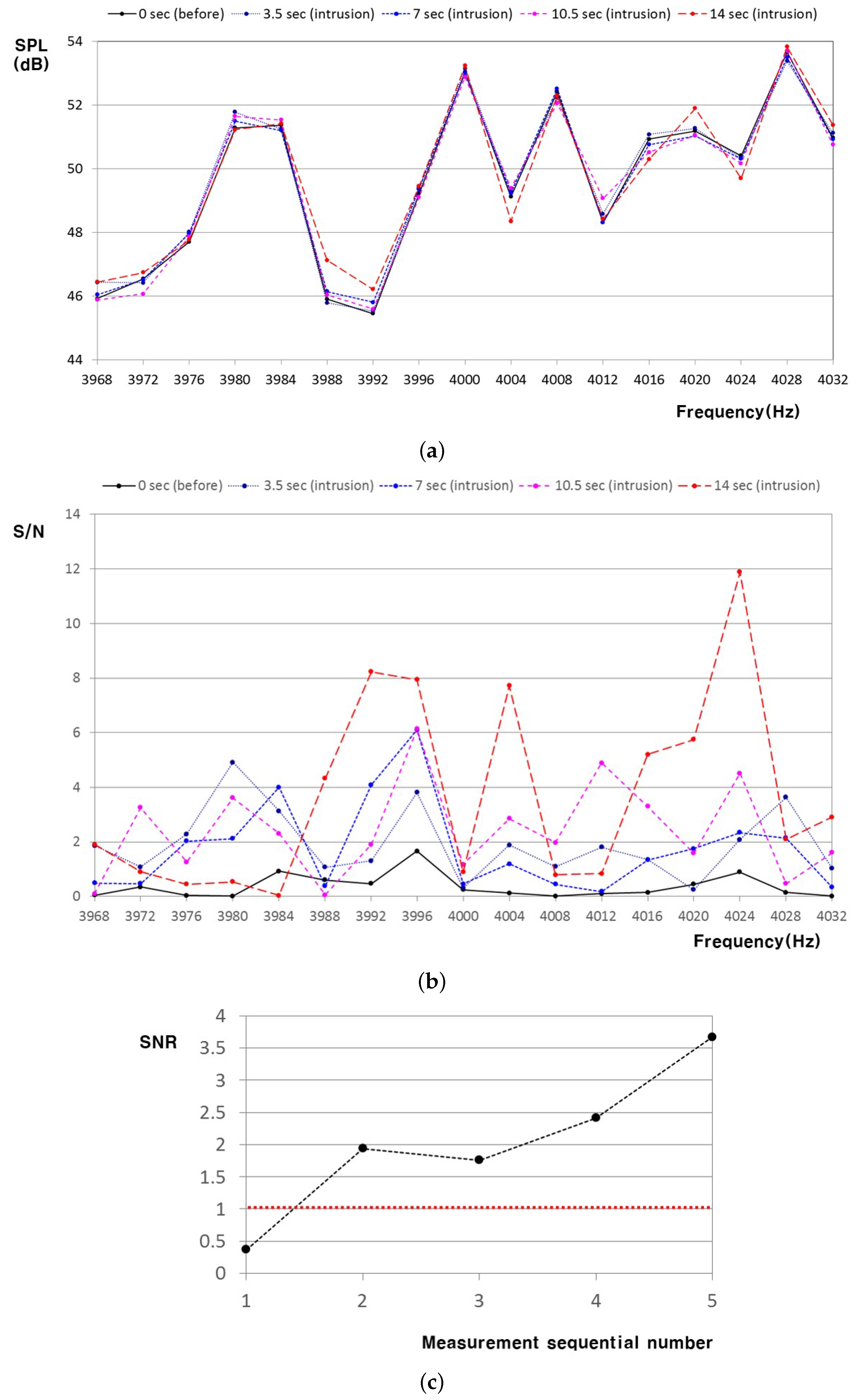
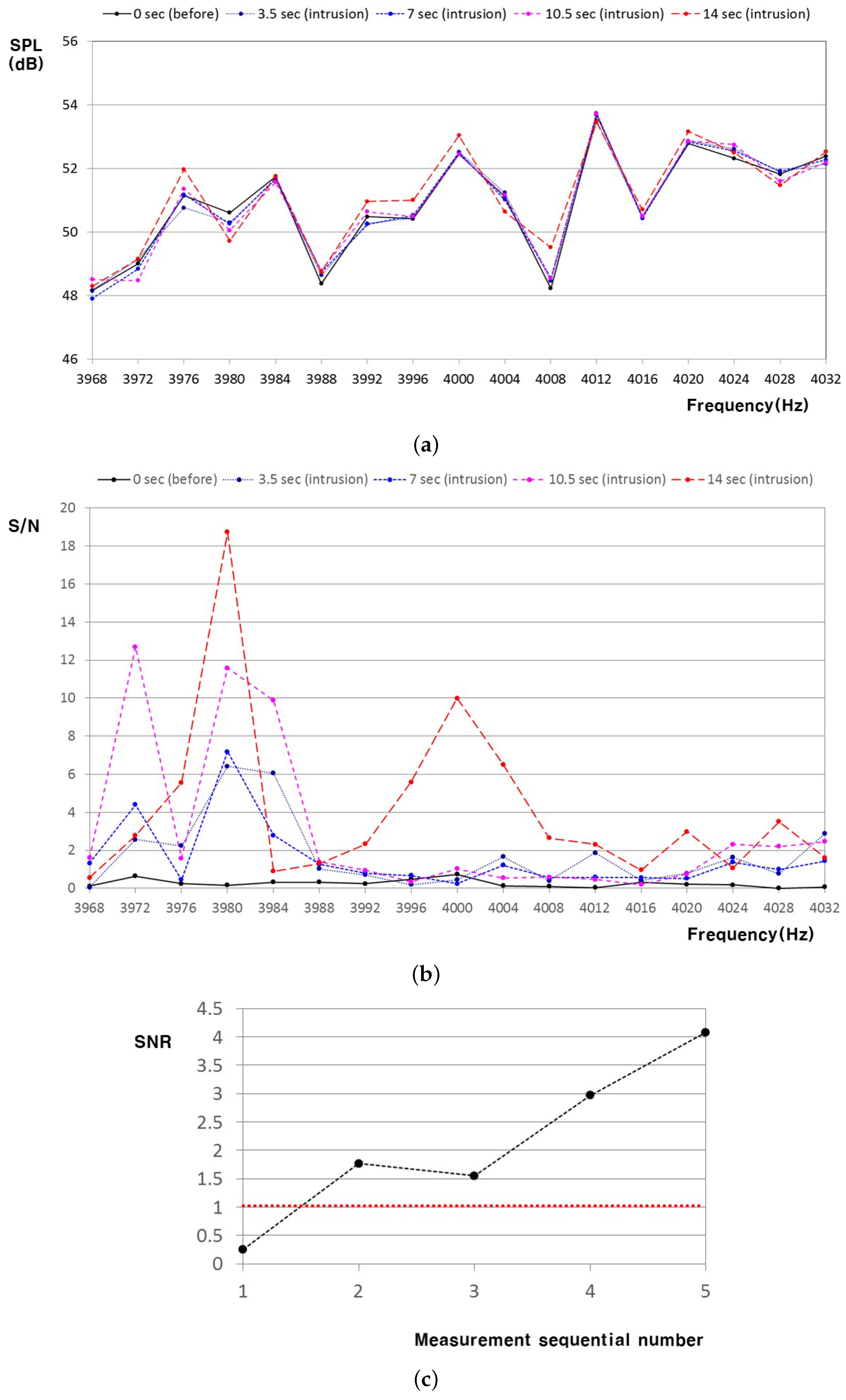
4. Sound Field Sensor-Based Intrusion Detection
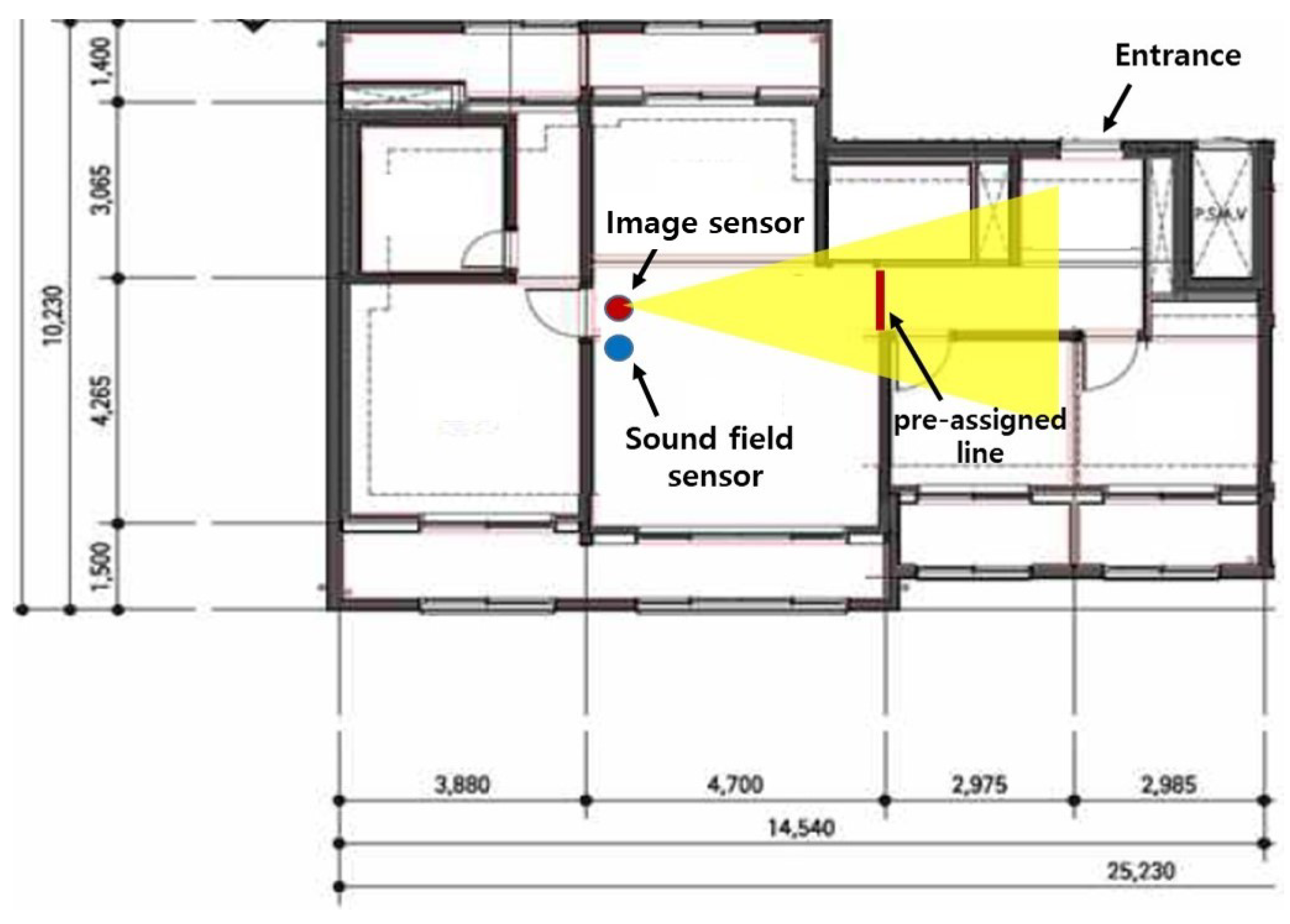
5. Hybrid Sensor-Based Intrusion Detection
6. Experimental Results
7. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Castro, J.; Delgado, M.; Medina, J.; Ruiz-Lozano, M. Intelligent surveillance system with integration of heterogeneous information for intrusion detection. Expert Syst. Appl. 2011, 38, 11182–11192. [Google Scholar] [CrossRef]
- Ko, S.; Yu, S.; Kang, W.; Park, C.; Lee, S.; Paik, J. Artifact-free Low-light Video Enhancement Using Temporal Similarity and Guide Map. IEEE Trans. Ind. Electron. 2017, 64, 6392–6401. [Google Scholar] [CrossRef]
- Park, S.; Moon, B.; Ko, S.; Yu, S.; Paik, J. Low-light image restoration using bright channel prior-based variational Retinex model. EURASIP J. Image Video Process. 2017, 2017, 44. [Google Scholar] [CrossRef]
- Lee, S.Q.; Park, K.H.; Kim, K.; Ryu, H.; Wang, S. Practical Implementation of Intrusion Detection Method Based on the Sound Field Variation. In Proceedings of the 20 th International Congress on Sound and Vibration, Bangkok, Thailand, 7–11 July 2013. [Google Scholar]
- Wang, J.-X. Research and implementation of intrusion detection algorithm in video surveillance. In Proceedings of the 2016 International Conference on Audio, Language and Image Processing (ICALIP), Shanghai, China, 11–12 July 2016; pp. 345–348. [Google Scholar] [CrossRef]
- Zhan, C.; Duan, X.; Xu, S.; Song, Z.; Luo, M. An Improved Moving Object Detection Algorithm Based on Frame Difference and Edge Detection. In Proceedings of the Fourth International Conference on Image and Graphics (ICIG 2007), Sichuan, China, 22–24 August 2007; pp. 519–523. [Google Scholar] [CrossRef]
- Yuan, X.; Sun, Z.; Varol, Y.; Bebis, G. A distributed visual surveillance system. In Proceedings of the IEEE Conference on Advanced Video and Signal Based Surveillance, Miami, FL, USA, 22 July 2003; pp. 199–204. [Google Scholar] [CrossRef]
- Dastidar, J.G.; Biswas, R. Tracking Human Intrusion through a CCTV. In Proceedings of the 2015 International Conference on Computational Intelligence and Communication Networks (CICN), Jabalpur, India, 12–14 December 2015; pp. 461–465. [Google Scholar] [CrossRef]
- Zhang, Y.L.; Zhang, Z.Q.; Xiao, G.; Wang, R.D.; He, X. Perimeter intrusion detection based on intelligent video analysis. In Proceedings of the 2015 IEEE 15th International Conference on Control, Automation and Systems (ICCAS), Busan, Korea, 13–16 October 2015; pp. 1199–1204. [Google Scholar]
- Chen, J.H.; Tseng, T.H.; Lai, C.L.; Hsieh, S.T. An intelligent virtual fence security system for the detection of people invading. In Proceedings of the 2012 IEEE 9th International Conference on Ubiquitous Intelligence & Computing and 9th International Conference on Autonomic & Trusted Computing (UIC/ATC), Fukuoka, Japan, 4–7 September 2012; pp. 786–791. [Google Scholar]
- Hariyono, J.; Hoang, V.D.; Jo, K.H. Moving object localization using optical flow for pedestrian detection from a moving vehicle. Sci. World J. 2014, 2014, 196415. [Google Scholar] [CrossRef] [PubMed]
- Hossen, M.K.; Tuli, S.H. A surveillance system based on motion detection and motion estimation using optical flow. In Proceedings of the 2016 5th International Conference on Informatics, Electronics and Vision (ICIEV), Dhaka, Bangladesh, 13–14 May 2016; pp. 646–651. [Google Scholar] [CrossRef]
- Chauhan, A.K.; Krishan, P. Moving object tracking using gaussian mixture model and optical flow. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2013, 3, 243–246. [Google Scholar]
- Black, J.; Velastin, S.; Boghossian, B. A real time surveillance system for metropolitan railways. In Proceedings of the IEEE Conference on Advanced Video and Signal Based Surveillance (AVSS 2005), Como, Italy, 15–16 September 2005; pp. 189–194. [Google Scholar]
- Steiger, O.; Weiss, S.; Felder, J. Real-time understanding of 3D video on an embedded system. In Proceedings of the 2009 IEEE 17th European Signal Processing Conference, Glasgow, UK, 24–28 August 2009; pp. 1518–1522. [Google Scholar]
- Liang, K.; Hon, H.; Khairunnisa, M.; Choong, T.; Khairil, H. Real time intrusion detection system for outdoor environment. In Proceedings of the 2012 IEEE Symposium on Computer Applications and Industrial Electronics (ISCAIE), Kota Kinabalu, Malaysia, 3–4 December 2012; pp. 147–152. [Google Scholar]
- Chen, C.H.; Chen, T.Y.; Lin, Y.C.; Hu, W.C. Moving-Object Intrusion Detection Based on Retinex-Enhanced Method. In Proceedings of the 2014 Tenth International Conference on Intelligent Information Hiding and Multimedia Signal Processing, Kitakyushu, Japan, 27–29 August 2014; pp. 281–284. [Google Scholar] [CrossRef]
- Ketcham, M.; Ganokratanaa, T.; Srinhichaarnun, S. The intruder detection system for rapid transit using CCTV surveillance based on histogram shapes. In Proceedings of the 2014 11th International Joint Conference on Computer Science and Software Engineering (JCSSE), Chon Buri, Thailand, 14–16 May 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Matern, D.; Condurache, A.P.; Mertins, A. Automated Intrusion Detection for Video Surveillance Using Conditional Random Fields. In Proceedings of the MVA2013 IAPR International Conference on Machine Vision Applications, Kyoto, Japan, 20–23 May 2013; pp. 298–301. [Google Scholar]
- Chowdhry, D.; Paranjape, R.; Laforge, P. Smart home automation system for intrusion detection. In Proceedings of the 2015 IEEE 14th Canadian Workshop on Information Theory (CWIT), St. John’s, NL, Canada, 6–9 July 2015; pp. 75–78. [Google Scholar]
- Zieger, C.; Brutti, A.; Svaizer, P. Acoustic based surveillance system for intrusion detection. In Proceedings of the 2009 Sixth IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS’09), Genova, Italy, 2–4 September 2009; pp. 314–319. [Google Scholar]
- Zhang, J.; Song, G.; Qiao, G.; Meng, T.; Sun, H. An indoor security system with a jumping robot as the surveillance terminal. IEEE Trans. Consum. Electron. 2011, 57. [Google Scholar] [CrossRef]
- Barry, A.S.; Czechanski, J. Ground surveillance radar for perimeter intrusion detection. In Proceedings of the 2000 19th IEEE Digital Avionics Systems Conference (DASC), Philadelphia, PA, USA, 7–13 October 2000. [Google Scholar]
- Howeverler, W.; Poitevin, P.; Bjomholt, J. Benefits of wide area intrusion detection systems using FMCW radar. In Proceedings of the 2007 41st Annual IEEE International Carnahan Conference on Security Technology, Ottawa, ON, Canada, 8–11 October 2007; pp. 176–182. [Google Scholar]
- Howeverler, W. Design considerations for intrusion detection wide area surveillance radars for perimeters and borders. In Proceedings of the 2008 IEEE Conference on Technologies for Homeland Security, Waltham, MA, USA, 12–13 May 2008; pp. 47–50. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (INFOCOM 2000), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Want, R.; Hopper, A.; Falcao, V.; Gibbons, J. The active badge location system. ACM Trans. Inf. Syst. (TOIS) 1992, 10, 91–102. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, W.; Deng, C.; Yin, S.; Wei, S. BriGuard: A lightweight indoor intrusion detection system based on infrared light spot displacement. IET Sci. Meas. Technol. 2014, 9, 306–314. [Google Scholar] [CrossRef]
- Youssef, M.; Mah, M.; Agrawala, A. Challenges: Device-free passive localization for wireless environments. In Proceedings of the 13th Annual ACM International Conference on Mobile Computing and Networking, Montréal, QC, Canada, 9–14 September 2007; pp. 222–229. [Google Scholar]
- Kosba, A.E.; Abdelkader, A.; Youssef, M. Analysis of a device-free passive tracking system in typical wireless environments. In Proceedings of the 2009 IEEE 3rd International Conference on New Technologies, Mobility and Security (NTMS), Cairo, Egypt, 20–23 December 2009; pp. 1–5. [Google Scholar]
- Kosba, A.E.; Saeed, A.; Youssef, M. Robust WLAN device-free passive motion detection. In Proceedings of the 2012 IEEE Wireless Communications and Networking Conference (WCNC), Lugano, Switzerland, 19–23 March 2012; pp. 3284–3289. [Google Scholar]
- Seifeldin, M.; Saeed, A.; Kosba, A.E.; El-Keyi, A.; Youssef, M. Nuzzer: A large-scale device-free passive localization system for wireless environments. IEEE Trans. Mob. Comput. 2013, 12, 1321–1334. [Google Scholar] [CrossRef]
- Andersson, M.; Ntalampiras, S.; Ganchev, T.; Rydell, J.; Ahlberg, J.; Fakotakis, N. Fusion of acoustic and optical sensor data for automatic fight detection in urban environments. In Proceedings of the 2010 IEEE 13th Conference on Information Fusion (FUSION), Edinburgh, UK, 26–29 July 2010; pp. 1–8. [Google Scholar]
- Azzam, R. Visual/Acoustic Detection and Localisation in Embedded Systems. 2016. Available online: http://dspace.lib.cranfield.ac.uk/handle/1826/10672 (accessed on 22 May 2018).
- Mahalanobis, A.; Kumar, B.V.; Song, S.; Sims, S.; Epperson, J. Unconstrained correlation filters. Appl. Opt. 1994, 33, 3751–3759. [Google Scholar] [CrossRef] [PubMed]
- Bolme, D.S.; Draper, B.A.; Beveridge, J.R. Average of synthetic exact filters. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Miami, FL, USA, 20–25 June 2009; pp. 2105–2112. [Google Scholar]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the 2010 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, USA, 13–18 June 2010; pp. 2544–2550. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. Exploiting the circulant structure of tracking-by-detection with kernels. In European Conference on Computer Vision; Springer: Heidelberg, Germany, 2012; pp. 702–715. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-speed tracking with kernelized correlation filters. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 583–596. [Google Scholar] [CrossRef] [PubMed]
- Lucas, B.D.; Kanade, T. An iterative image registration technique with an application to stereo vision. In Proceedings of the 7th international joint conference on Artificial intelligence (IJCAI’81), Vancouver, BC, Canada, 24–28 August 1981; Volume 2. [Google Scholar]
- Hwangbo, M.; Kim, J.S.; Kanade, T. Inertial-aided KLT feature tracking for a moving camera. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2009), St. Louis, MO, USA, 10–15 October 2009; pp. 1909–1916. [Google Scholar]
- Comaniciu, D.; Ramesh, V.; Meer, P. Real-time tracking of non-rigid objects using mean shift. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Hilton Head Island, SC, USA, 15 June 2000; Volume 2, pp. 142–149. [Google Scholar]
- Faragher, R. Understanding the Basis of the Kalman Filter Via a Simple and Intuitive Derivation [Lecture Notes]. IEEE Signal Process. Mag. 2012, 29, 128–132. [Google Scholar] [CrossRef]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Park, K.H.; Lee, S.Q. Early stage fire sensing based on audible sound pressure spectra with multi-tone frequencies. Sens. Actuators A Phys. 2016, 247, 418–429. [Google Scholar] [CrossRef]
- Pham, C. Low cost Wireless Image Sensor Networks for visual surveillance and intrusion detection applications. In Proceedings of the 2015 IEEE 12th International Conference on Networking, Sensing and Control (ICNSC), Taipei, Taiwan, 9–11 April 2015; pp. 376–381. [Google Scholar]
- Pandey, P.; Laxmi, V. Design of low cost and power efficient Wireless vision Sensor for surveillance and monitoring. In Proceedings of the 2016 International Conference on Computation of Power, Energy Information and Commuincation (ICCPEIC), Chennai, India, 20–21 April 2016; pp. 113–117. [Google Scholar]
- Raheja, J.L.; Deora, S.; Chaudhary, A. Cross border intruder detection in hilly terrain in dark environment. Opt. Int. J. Light Electron Opt. 2016, 127, 535–538. [Google Scholar] [CrossRef]
- Prati, A.; Vezzani, R.; Benini, L.; Farella, E.; Zappi, P. An integrated multi-modal sensor network for video surveillance. In Proceedings of the Third ACM International Workshop on Video Surveillance & Sensor Networks, Hilton, Singapore, 11 November 2005; pp. 95–102. [Google Scholar]
- Song, B.; Choi, H.; Lee, H.S. Surveillance tracking system using passive infrared motion sensors in wireless sensor network. In Proceedings of the IEEE International Conference on Information Networking (ICOIN 2008), Busan, Korea, 23–25 January 2008; pp. 1–5. [Google Scholar]
- Fitzmaurice, M. The Use of Thermal Imagery for Intrusion Detection in a Public Transit Environment. In Proceedings of the 2015 Joint Rail Conference, San Jose, CA, USA, 23–26 March 2015; p. V001T06A009. [Google Scholar]
- Lefter, I.; Burghouts, G.J.; Rothkrantz, L.J. Learning the fusion of audio and video aggression assessment by meta-information from human annotations. In Proceedings of the 2012 IEEE 15th International Conference on Information Fusion (FUSION), Singapore, 9–12 July 2012; pp. 1527–1533. [Google Scholar]
- Lu, Y.; Zhu, T.; Chen, L.; Bao, X. Distributed vibration sensor based on coherent detection of phase-OTDR. J. Lightwave Technol. 2010, 28, 3243–3249. [Google Scholar]
- Owen, A.; Duckworth, G.; Worsley, J. OptaSense: Fibre optic distributed acoustic sensing for border monitoring. In Proceedings of the 2012 European Intelligence and Security Informatics Conference (EISIC), Odense, Denmark, 22–24 August 2012; pp. 362–364. [Google Scholar]















© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, H.; Park, J.; Kim, H.; Lee, S.Q.; Park, K.-H.; Paik, J. Hybrid Sensor Network-Based Indoor Surveillance System for Intrusion Detection. Symmetry 2018, 10, 181. https://doi.org/10.3390/sym10060181
Park H, Park J, Kim H, Lee SQ, Park K-H, Paik J. Hybrid Sensor Network-Based Indoor Surveillance System for Intrusion Detection. Symmetry. 2018; 10(6):181. https://doi.org/10.3390/sym10060181
Chicago/Turabian StylePark, Hasil, Jinho Park, Heegwang Kim, Sung Q Lee, Kang-Ho Park, and Joonki Paik. 2018. "Hybrid Sensor Network-Based Indoor Surveillance System for Intrusion Detection" Symmetry 10, no. 6: 181. https://doi.org/10.3390/sym10060181
APA StylePark, H., Park, J., Kim, H., Lee, S. Q., Park, K.-H., & Paik, J. (2018). Hybrid Sensor Network-Based Indoor Surveillance System for Intrusion Detection. Symmetry, 10(6), 181. https://doi.org/10.3390/sym10060181