Some Exact Solutions and Conservation Laws of the Coupled Time-Fractional Boussinesq-Burgers System

{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
3. Symmetry Analysis
3.1. Lie Symmetry Analysis
3.2. Symmetry Reductions
4. Power Series Solution
Convergence Analysis
5. Conservation Laws
- Case I:
- when , the conserved vectors are
- Case II:
- when , the conserved vectors are
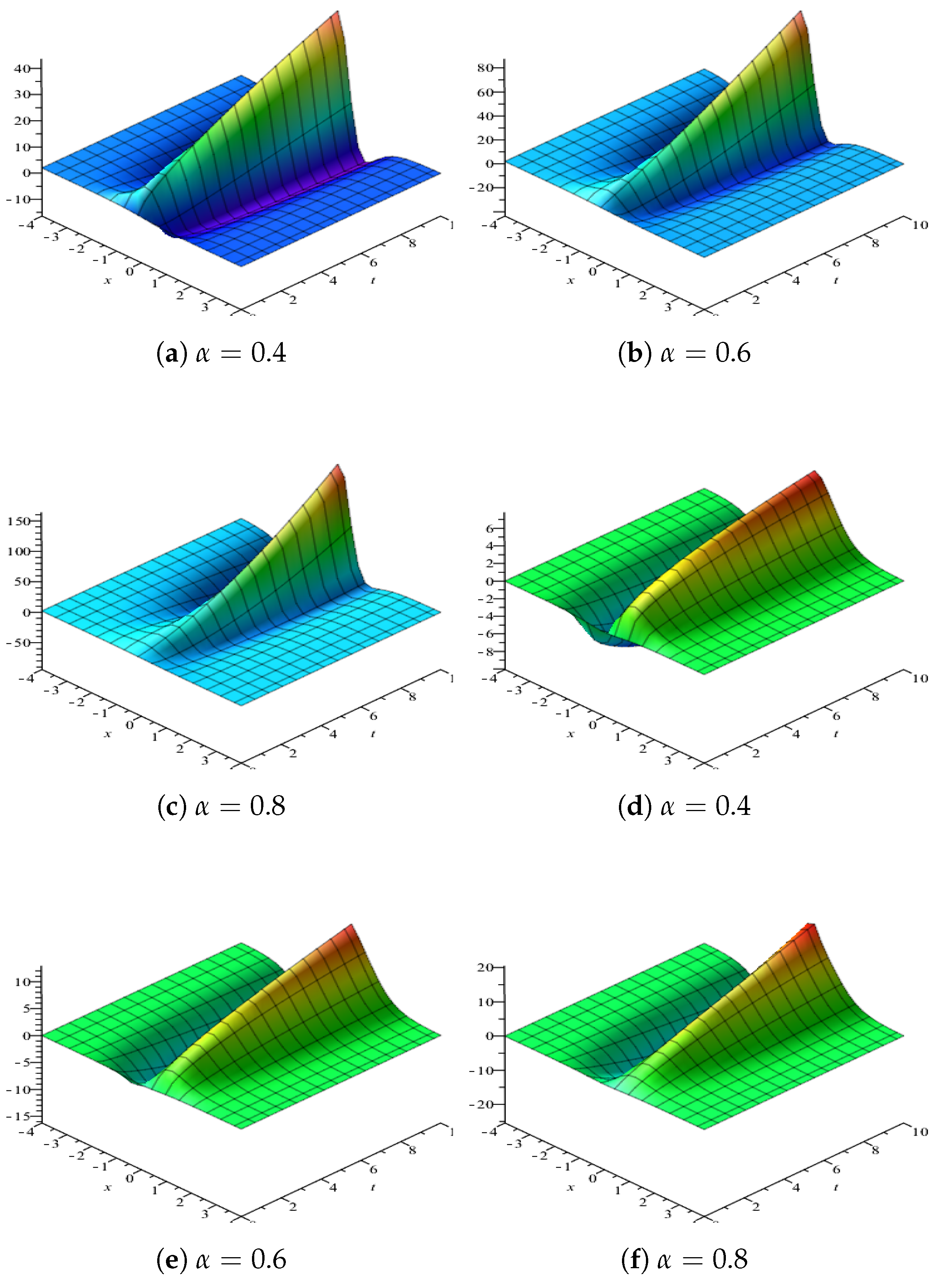
6. Numerical Simulation and Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vinagre, B.M.; Podlubny, I.; Hernandez, A.; Feliu, V. Some approximations of fractional order operators used in control theory and applications. Fract. Calc. Appl. Anal. 2000, 3, 231–248. [Google Scholar]
- Oldham, K.; Spanier, J. The Fractional Calculus Theory and Applications of Differentiation and Integration to Arbitrary Order; Elsevier: Amsterdam, The Netherlands, 1974. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives: Theory and Applications; Gordon and Breach Science Publishers: Philadelphia, PA, USA, 1993; pp. 397–414. [Google Scholar]
- Tchier, F.; Yusuf, A.; Aliyu, A.I.; Baleanu, D. Time fractional third-order variant Boussinesq system: Symmetry analysis, explicit solutions, conservation laws and numerical approximations. Eur. Phys. J. Plus 2018, 133, 240. [Google Scholar] [CrossRef]
- Gazizov, R.K.; Kasatkin, A.A.; Lukashchuk, S.Y. Continuous transformation groups of fractional differential equations. Vestnik Usatu 2007, 9, 21. [Google Scholar]
- Sahadevan, R.; Bakkyaraj, T. Invariant analysis of time fractional generalized Burgers and Korteweg-de Vries equations. J. Math. Anal. Appl. 2012, 393, 341–347. [Google Scholar] [CrossRef]
- Gazizov, R.K.; Kasatkin, A.A.; Lukashchuk, S.Y. Symmetry properties of fractional diffusion equations. Phys. Scr. 2009, 2009, 014016. [Google Scholar] [CrossRef]
- Buckwar, E.; Luchko, Y. Invariance of a partial differential equation of fractional order under the Lie group of scaling transformations. J. Math. Anal. Appl. 1998, 227, 81–97. [Google Scholar] [CrossRef]
- Bakkyaraj, T.; Sahadevan, R. Invariant analysis of nonlinear fractional ordinary differential equations with Riemann-Liouville fractional derivative. Nonlinear Dyn. 2015, 80, 447–455. [Google Scholar] [CrossRef]
- Ouhadan, A.; Elkinani, E.H. Exact solutions of time fractional Kolmogorov equation by using Lie symmetry analysis. J. Fract. Calc. Appl. 2014, 5, 97–104. [Google Scholar]
- Wang, G.; Liu, X.; Zhang, Y. Lie symmetry analysis to the time fractional generalized fifth-order KdV equation. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 2321–2326. [Google Scholar] [CrossRef]
- Wang, X.B.; Tian, S.F.; Qin, C.Y.; Zhang, T.T. Lie symmetry analysis, conservation laws and exact solutions of the generalized time fractional Burgers equation. Europhys. Lett. 2016, 114, 20003. [Google Scholar] [CrossRef]
- Jannelli, A.; Ruggieri, M.; Speciale, M.P. Exact and numerical solutions of time-fractional advection-diffusion equation with a nonlinear source term by means of the Lie symmetries. Nonlinear Dyn. 2018, 92, 543–555. [Google Scholar] [CrossRef]
- Hosseini, V.R.; Shivanian, E.; Chen, W. Local integration of 2-D fractional telegraph equation via local radial point interpolant approximation. Eur. Phys. J. Plus 2015, 130, 33. [Google Scholar] [CrossRef]
- Rui, W.; Zhang, X. Invariant analysis and conservation laws for the time fractional foam drainage equation. Eur. Phys. J. Plus 2015, 130, 192. [Google Scholar] [CrossRef]
- Wang, G.; Kara, A.H.; Fakhar, K. Symmetry analysis and conservation laws for the class of time-fractional nonlinear dispersive equation. Nonlinear Dyn. 2015, 82, 281–287. [Google Scholar] [CrossRef]
- Cao, J.; Syta, A.; Litak, G.; Zhou, S.; Inman, D.J.; Chen, Y. Regular and chaotic vibration in a piezoelectric energy harvester with fractional damping. Eur. Phys. J. Plus 2015, 130, 103. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.W.; Xu, T.Z. Invariant analysis and exact solutions of nonlinear time fractional Sharma-Tasso-Olver equation by Lie group analysis. Nonlinear Dyn. 2014, 76, 571–580. [Google Scholar] [CrossRef]
- Zhang, Y.; Mei, J.; Zhang, X. Symmetry properties and explicit solutions of some nonlinear differential and fractional equations. Appl. Math. Comput. 2018, 337, 408–418. [Google Scholar] [CrossRef]
- Qin, C.Y.; Tian, S.F.; Wang, X.B.; Zhang, T.T. Lie symmetries, conservation laws and explicit solutions for time fractional Rosenau-Haynam equation. Commun. Theor. Phys. 2017, 67, 157. [Google Scholar] [CrossRef]
- Singla, K.; Gupta, R.K. On invariant analysis of some time fractional nonlinear systems of partial differential equations. J. Math. Phys. 2016, 57, 101504. [Google Scholar] [CrossRef]
- Singla, K.; Gupta, R.K. Conservation laws for certain time fractional nonlinear systems of partial differential equations. Commun. Nonlinear Sci. Numer. Simul. 2017, 53, 10–21. [Google Scholar] [CrossRef]
- Noether, E. Invariant variation problems. Transp. Theory Stat. Phys. 1971, 1, 186–207. [Google Scholar] [CrossRef] [Green Version]
- Lukashchuk, S.Y. Conservation laws for time-fractional subdiffusion and diffusion-wave equations. Nonlinear Dyn. 2015, 80, 791–802. [Google Scholar] [CrossRef] [Green Version]
- Ibragimov, N.H. A new conservation theorem. J. Math. Anal. Appl. 2007, 333, 311–328. [Google Scholar] [CrossRef] [Green Version]
- Khater, M.M.A.; Kumar, D. New exact solutions for the time fractional coupled Boussinesq-Burger equation and approximate long water wave equation in shallow water. J. Ocean Eng. Sci. 2017, 2, 223–228. [Google Scholar] [CrossRef]
- Yang, X.J.; Baleanu, D.; Srivastava, H.M. Local Fractional Integral Transforms and Their Applications; Academic Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Yang, X.J.; Srivastava, H.M.; Machado, J.A. A new fractional derivative without singular kernel: Application to the modelling of the steady heat flow. arXiv, 2015; arXiv:1601.01623. [Google Scholar] [CrossRef]
- Liao, H.; Lyu, P.; Vong, S. Second-order BDF time approximation for Riesz space-fractional diffusion equations. Int. J. Comput. Math. 2018, 95, 1–18. [Google Scholar] [CrossRef]
- Zhang, S. Monotone iterative method for initial value problem involving Riemann-Liouville fractional derivatives. Nonlinear Anal. Theory Methods Appl. 2009, 71, 2087–2093. [Google Scholar] [CrossRef]
- Agarwal, R.P.; Belmekki, M.; Benchohra, M. A survey on semilinear differential equations and inclusions involving Riemann-Liouville fractional derivative. Adv. Differ. Equ. 2009, 2009, 981728. [Google Scholar] [CrossRef]
- Heymans, N.; Podlubny, I. Physical interpretation of initial conditions for fractional differential equations with Riemann-Liouville fractional derivatives. Rheol. Acta 2006, 45, 765–771. [Google Scholar] [CrossRef]
- He, J.H. Approximate analytical solution for seepage flow with fractional derivatives in porous media. Comput. Methods Appl. Mech. Eng. 1998, 167, 57–68. [Google Scholar] [CrossRef]
- Agrawal, O.P. Formulation of Euler-Lagrange equations for fractional variational problems. J. Math. Anal. Appl. 2002, 272, 368–379. [Google Scholar] [CrossRef]
- Deng, W.; Li, C.; Lü, J. Stability analysis of linear fractional differential system with multiple time delays. Nonlinear Dyn. 2007, 48, 409–416. [Google Scholar] [CrossRef]
- Frederico, G.S.F.; Torres, D.F.M. Fractional conservation laws in optimal control theory. Nonlinear Dyn. 2008, 53, 215–222. [Google Scholar] [CrossRef]
- Jumarie, G. Table of some basic fractional calculus formulae derived from a modified Riemann-Liouville derivative for non-differentiable functions. Appl. Math. Lett. 2009, 22, 378–385. [Google Scholar] [CrossRef]
- Jumarie, G. Laplace’s transform of fractional order via the Mittag-Leffler function and modified Riemann-Liouville derivative. Appl. Math. Lett. 2009, 22, 1659–1664. [Google Scholar] [CrossRef]
- Singla, K.; Gupta, R.K. Space-time fractional nonlinear partial differential equations: symmetry analysis and conservation laws. Nonlinear Dyn. 2017, 89, 321–331. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: San Diego, CA, USA, 2006. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; Wiley-Interscience: Hoboken, NJ, USA, 1993. [Google Scholar]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier: San Diego, CA, USA, 1998. [Google Scholar]
- Huang, H.N.; Marcantognini, S.A.M.; Young, N.J. Chain rules for higher derivatives. Math. Intell. 2006, 28, 61–69. [Google Scholar] [CrossRef] [Green Version]
- Leo, R.A.; Sicuro, G.; Tempesta, P. A foundational approach to the Lie theory for fractional order partial differential equations. Fract. Calc. Appl. Anal. 2017, 20, 212–231. [Google Scholar] [CrossRef]
- Kiryakova, V.S. Generalized Fractional Calculus and Applications; CRC Press: Boca Raton, FL, USA, 1993. [Google Scholar]
- Mathai, A.M.; Haubold, H.J. Erdélyi-Kober fractional integral operators from a statistical perspective. Tbilisi Math. J. 2017, 10, 145–159. [Google Scholar] [CrossRef]
- Sneddon, I.N. The use in mathematical physics of Erdélyi-Kober operators and of some of their generalizations. In Fractional Calculus and Its Applications; Springer: Berlin/Heidelberg, Germany, 1975; pp. 37–79. [Google Scholar]
- Rudin, W. Principles of Mathematical Analysis; McGraw-hill: New York, NY, USA, 1976. [Google Scholar]
- Iyiola, O.S.; Olayinka, O.G. Analytical solutions of time-fractional models for homogeneous Gardner equation and non-homogeneous differential equations. Ain Shams Eng. J. 2014, 5, 999–1004. [Google Scholar] [CrossRef] [Green Version]
- He, J.H. Homotopy perturbation method: A new nonlinear analytical technique. Appl. Math. Comput. 2003, 135, 73–79. [Google Scholar] [CrossRef]


© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, D.; Zhang, Y.; Liu, W.; Liu, J. Some Exact Solutions and Conservation Laws of the Coupled Time-Fractional Boussinesq-Burgers System. Symmetry 2019, 11, 77. https://doi.org/10.3390/sym11010077
Shi D, Zhang Y, Liu W, Liu J. Some Exact Solutions and Conservation Laws of the Coupled Time-Fractional Boussinesq-Burgers System. Symmetry. 2019; 11(1):77. https://doi.org/10.3390/sym11010077
Chicago/Turabian StyleShi, Dandan, Yufeng Zhang, Wenhao Liu, and Jiangen Liu. 2019. "Some Exact Solutions and Conservation Laws of the Coupled Time-Fractional Boussinesq-Burgers System" Symmetry 11, no. 1: 77. https://doi.org/10.3390/sym11010077