1. Introduction
Real world problems from various applications in science and engineering can often be modeled into ordinary differential equations (ODEs). Some of the problems are modeled in the form of higher order ODEs [
1] in such a way that ODE will describe the behavior of the problems. The main focus of this paper is on the linear third-order stiff initial value problems (IVPs). The linear third order ODEs is categorized as higher order ODE. Define the third-order ODE with its initial conditions as
where
,
a is the starting point and
z is the end point.
Numerical approximations are introduced to solve problems that are impossible to find the actual solution for. We found that a number of methods in the literature can provide approximate solutions for higher order ODEs. Commonly, the higher order ODE is converted into its equivalent system of first order before it is solved. Then, the first-order methods are used to find the approximate solutions. However, this approach leads to complicated execution work and lengthy computation time [
2]. It is therefore significant to overcome this drawback by introducing a more efficient method that can solve the higher order problems directly. For that reason, solving higher order problems directly eases the execution work where the proof of direct solutions give advantages in speed and accuracy [
3].
To date, the direct solutions that have been proposed to numerically approximate the third-order ODEs include new hybrid block method [
4], new linear block method [
5] and four-point block hybrid collocation method with two off-step points [
2]. However, some of these methods are able to solve non-stiff ODEs. Besides, fourth-order improved Runge–Kutta method is proposed for solving special third-order ODEs [
6].
Stiffness is one of the issues in ODE. Explicit methods, however, are not suitable to be applied since small step sizes and a large number of integration steps are required. Thus, implicit methods will take over the explicit methods to provide better performances. In the literature, we found that various methods have been introduced for finding stiff solutions. The pioneering and most well-known method, backward differentiation formula (BDF), was introduced by Gear [
7]. In addition, backward Euler method [
8], second-derivative general linear methods (SGLMs) [
9], high order block implicit multistep [
10] and new fourth-order, four-stage parallel Rosenbrock method (NPROS4) [
11] have also been proven to be reliable in solving stiffness.
Further innovation on BDF saw the block method being associated with BDF method, also known as block backward differentiation formula (BBDF). The innovation is made at which BBDF is capable to approximate several points instead of one point only at the same time. BBDF has shown its excellent success as this method is capable of providing better approximations and reducing the computational effort for solving the first- and second-order stiff ODE problems [
12,
13,
14,
15,
16]. In this paper, we develop constant step size of order three, four and five VOHOBBDF and fit the three methods in a single code by applying an adaptive order approach. This approach can enhance the computational efficiency for the direct approximations of the problem in Equation (
1) such as minimize computational cost as compared to the BBDF while maintaining its accuracy. Due to the advantages, VOHOBBDF can produce more accurate results, manage to reduce the total number of steps and less time is needed to compute the solutions.
This paper is organized as follows. The formulae for VOHOBBDF are developed based on procedure stated in the second section followed by the detailed explanation on how to implement three different orders of VOHOBBDF methods in a single code. Then, we compute the solutions of the higher order ODEs by applying the proposed code to demonstrate its efficiency, which is followed by a discussion on the performances. Lastly, the final part concludes the advantages of applying the approach to VOHOBBDF methods for treating higher order ODEs.
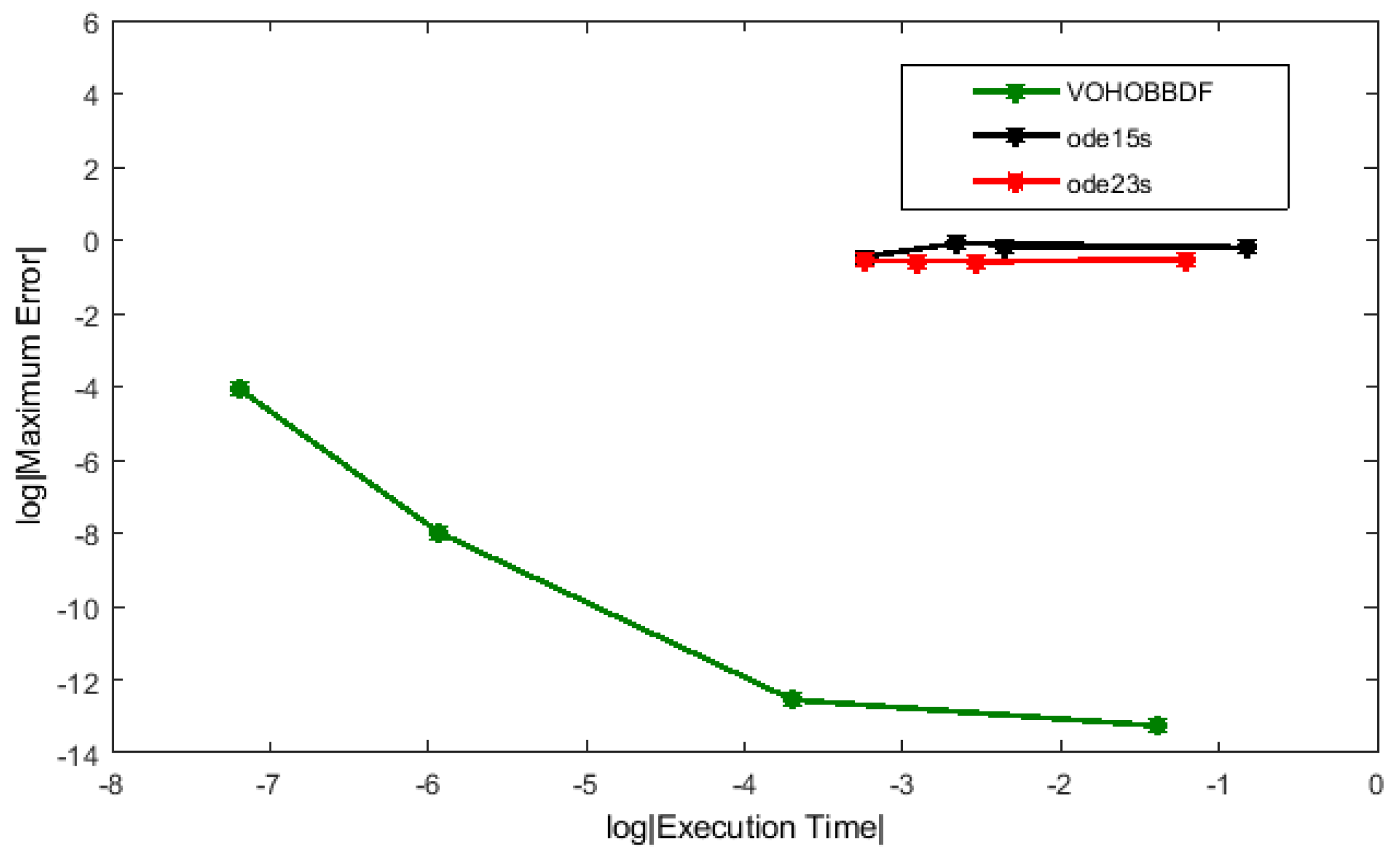
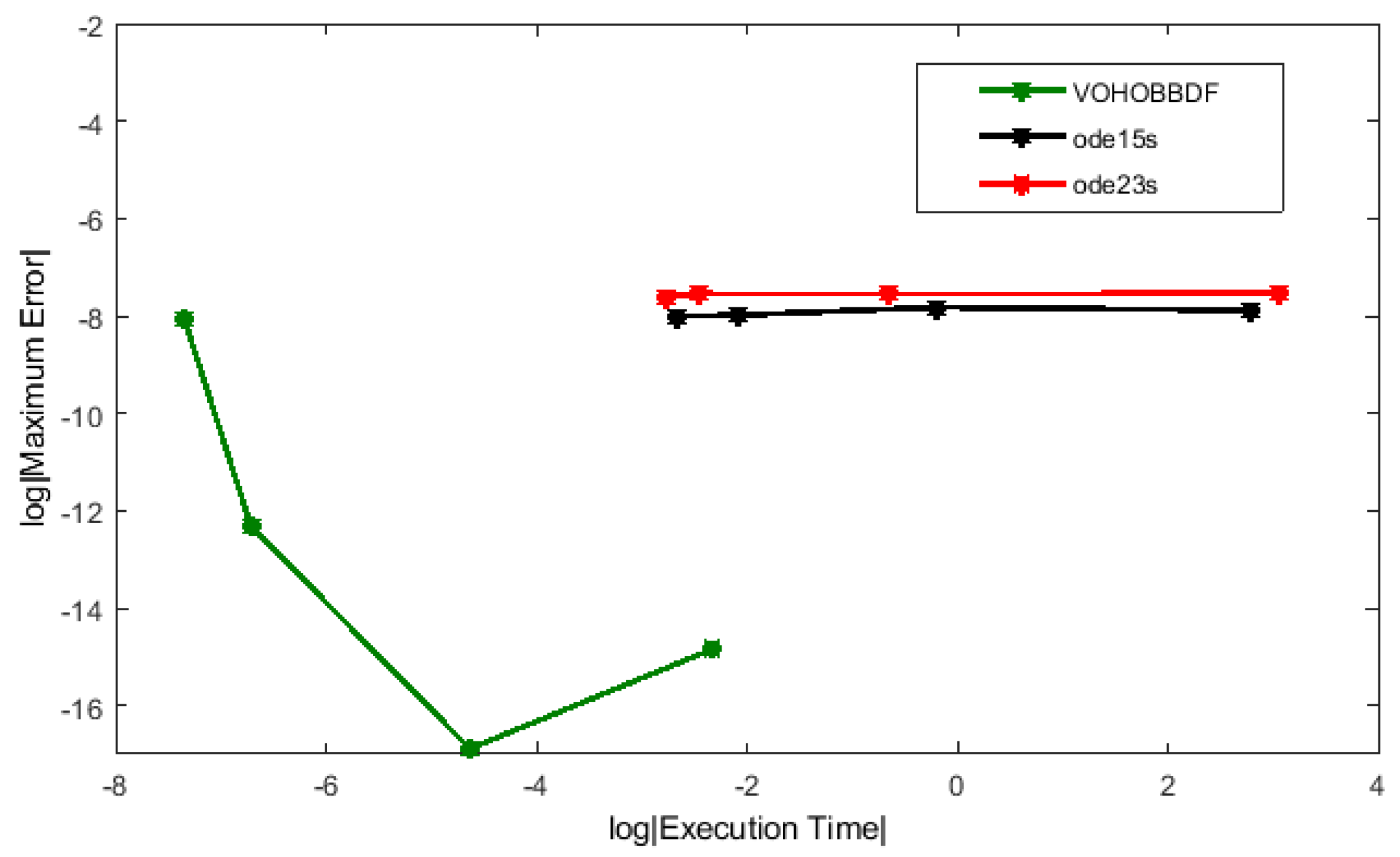
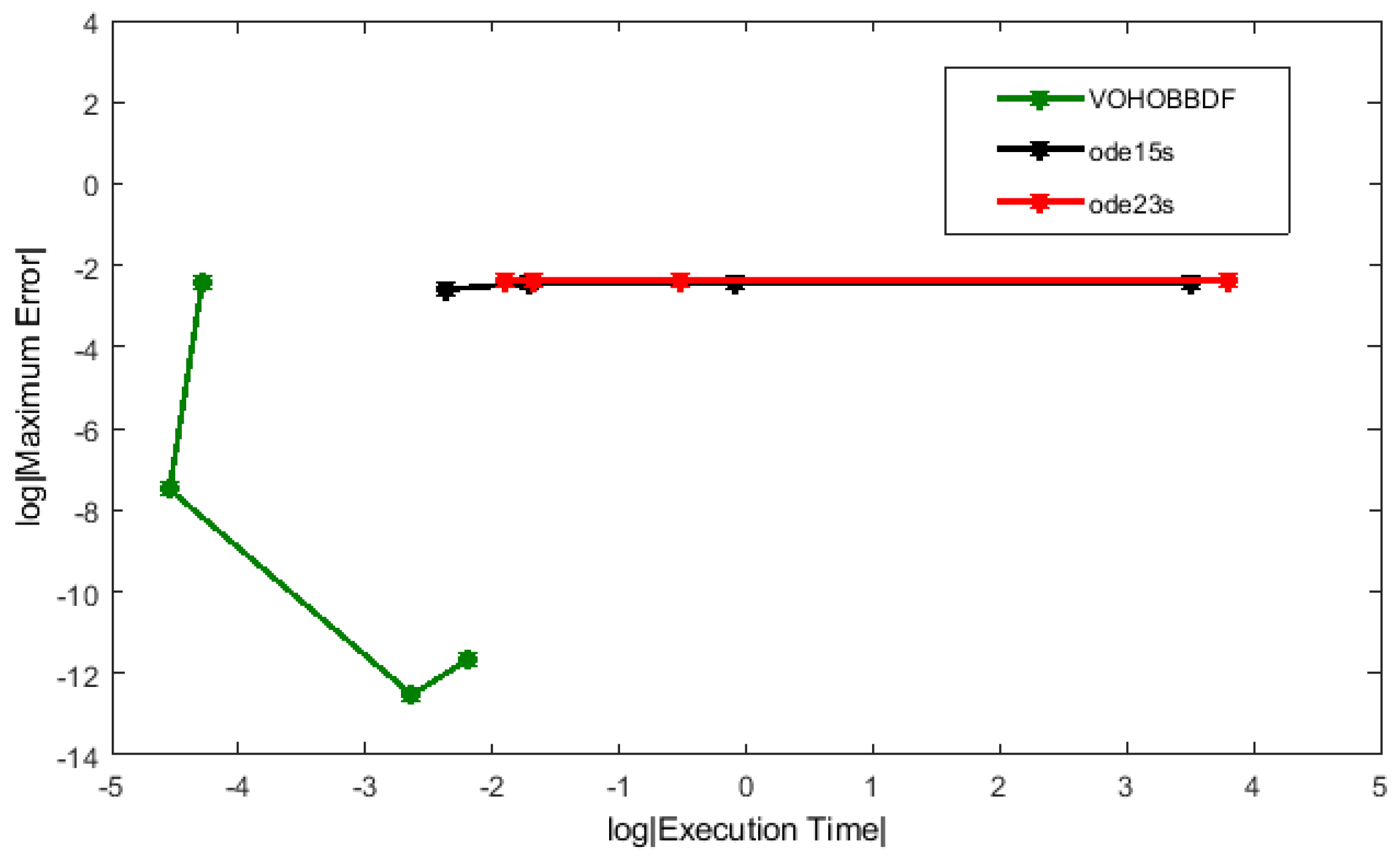
4. Numerical Experiments and Discussion
Three different problems were solved directly using the developed method by applying the variable order approach. To analyze the efficiency of applying this approach, the results were compared with two built-in stiff Matlab codes, ode15s and ode23s, which were designed to solve the stiff problems. However, to solve these problems using the Matlab codes, they need to be reduced into their equivalent systems of first order. The accuracy and efficiency of the methods are given in
Table 3,
Table 4 and
Table 5 for comparison purposes.
Figure 1,
Figure 2 and
Figure 3 illustrate the results in
Table 3,
Table 4 and
Table 5.
Therefore, the average error (AE) and maximum error (ME) are defined as
where
TS is the total steps and
n is the number of equations.
The general form for equivalent system of first order ODE is as follows.
Refer to the general form of third order ODE in Equation (
1) and its equivalent form of first order in Equation (
4). The problems to be tested are as follows.
Problem 1
Exact solution:
Initial conditions:
Interval:
Equivalent system of first order
Exact solutions:
Initial conditions:
Problem 2
Exact solution:
Initial conditions:
Interval:
Equivalent system of first order
Exact solutions:
Initial conditions:
Problem 3
Exact solution:
Initial conditions:
Interval:
Equivalent system of first order
Exact solutions:
Initial conditions:






{kind=link}
{kind=link}
{kind=link}