A Fast 4K Video Frame Interpolation Using a Hybrid Task-Based Convolutional Neural Network

Abstract
:1. Introduction
2. Proposed Approach
2.1. Temporal Interpolation Network
2.2. Spatial Interpolation Network
2.3. Loss Function
2.4. Training
3. Experimental Results
3.1. Evaluation Dataset
3.2. Quantitative Evaluation
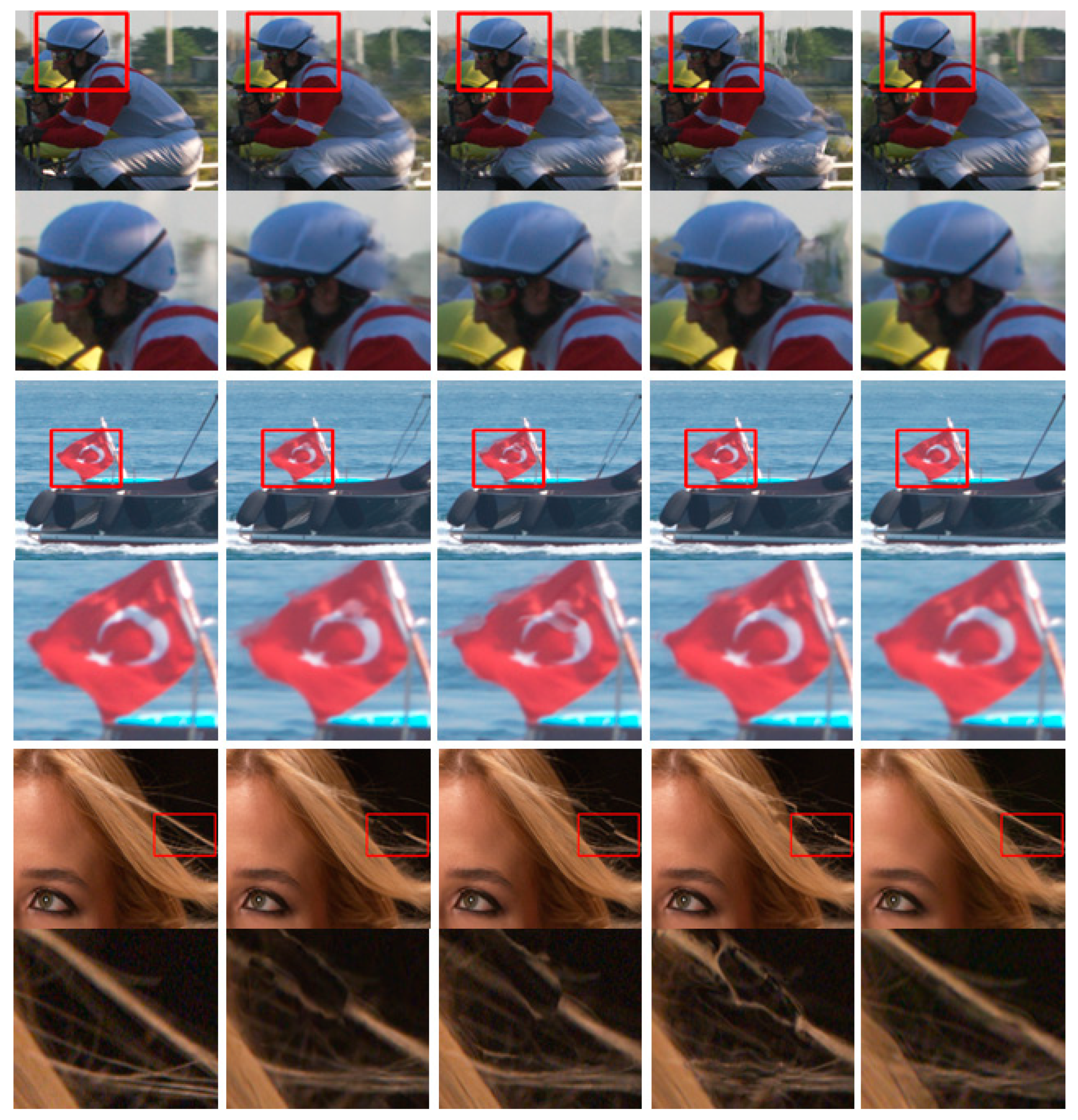
3.3. Visual Comparison
3.4. Ablation Study
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Werlberger, M.; Pock, T.; Unger, M.; Bischof, H. Optical flow guided TV-L 1 video interpolation and restoration. In International Workshop on Energy Minimization Methods in Computer Vision and Pattern Recognition; Springer: Berlin/Heidelberg, Germany, 2011; pp. 273–286. [Google Scholar]
- Yu, Z.; Li, H.; Wang, Z.; Hu, Z.; Chen, C.W. Multi-level video frame interpolation: Exploiting the interaction among different levels. IEEE Trans. Circuits Syst. Video Technol. 2013, 23, 1235–1248. [Google Scholar] [CrossRef]
- Brox, T.; Bruhn, A.; Papenberg, N.; Weickert, J. High accuracy optical flow estimation based on a theory for warping. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2004; pp. 25–36. [Google Scholar]
- Dosovitskiy, A.; Fischer, P.; Ilg, E.; Hausser, P.; Hazirbas, C.; Golkov, V.; Van Der Smagt, P.; Cremers, D.; Brox, T. Flownet: Learning optical flow with convolutional networks. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 2758–2766. [Google Scholar]
- Ilg, E.; Mayer, N.; Saikia, T.; Keuper, M.; Dosovitskiy, A.; Brox, T. Flownet 2.0: Evolution of optical flow estimation with deep networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2462–2470. [Google Scholar]
- Ranjan, A.; Black, M.J. Optical flow estimation using a spatial pyramid network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4161–4170. [Google Scholar]
- Ren, Z.; Yan, J.; Ni, B.; Liu, B.; Yang, X.; Zha, H. Unsupervised deep learning for optical flow estimation. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 12 February 2017. [Google Scholar]
- Sun, D.; Yang, X.; Liu, M.Y.; Kautz, J. Pwc-net: Cnns for optical flow using pyramid, warping, and cost volume. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 8934–8943. [Google Scholar]
- Long, G.; Kneip, L.; Alvarez, J.M.; Li, H.; Zhang, X.; Yu, Q. Learning image matching by simply watching video. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 434–450. [Google Scholar]
- Liu, Z.; Yeh, R.A.; Tang, X.; Liu, Y.; Agarwala, A. Video frame synthesis using deep voxel flow. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 4463–4471. [Google Scholar]
- Jiang, H.; Sun, D.; Jampani, V.; Yang, M.H.; Learned-Miller, E.; Kautz, J. Super slomo: High quality estimation of multiple intermediate frames for video interpolation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 9000–9008. [Google Scholar]
- Liu, Y.L.; Liao, Y.T.; Lin, Y.Y.; Chuang, Y.Y. Deep Video Frame Interpolation using Cyclic Frame Generation. In Proceedings of the AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019. [Google Scholar]
- Niklaus, S.; Mai, L.; Liu, F. Video frame interpolation via adaptive convolution. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 670–679. [Google Scholar]
- Niklaus, S.; Mai, L.; Liu, F. Video frame interpolation via adaptive separable convolution. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 261–270. [Google Scholar]
- Niklaus, S.; Liu, F. Context-aware synthesis for video frame interpolation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 1701–1710. [Google Scholar]
- Meyer, S.; Wang, O.; Zimmer, H.; Grosse, M.; Sorkine-Hornung, A. Phase-based frame interpolation for video. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 1410–1418. [Google Scholar]
- Mathieu, M.; Couprie, C.; LeCun, Y. Deep multi-scale video prediction beyond mean square error. arXiv 2015, arXiv:1511.05440. [Google Scholar]
- Kim, J.; Kwon Lee, J.; Mu Lee, K. Accurate image super-resolution using very deep convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 1 July 2016; pp. 1646–1654. [Google Scholar]
- Dong, C.; Loy, C.C.; He, K.; Tang, X. Learning a deep convolutional network for image super-resolution. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2014; pp. 184–199. [Google Scholar]
- Lim, B.; Son, S.; Kim, H.; Nah, S.; Mu Lee, K. Enhanced deep residual networks for single image super-resolution. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Honolulu, HI, USA, 21–26 July 2017; pp. 136–144. [Google Scholar]
- Lai, W.S.; Huang, J.B.; Ahuja, N.; Yang, M.H. Deep laplacian pyramid networks for fast and accurate super-resolution. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 624–632. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Clevert, D.A.; Unterthiner, T.; Hochreiter, S. Fast and accurate deep network learning by exponential linear units (elus). arXiv 2015, arXiv:1511.07289. [Google Scholar]
- Nair, V.; Hinton, G.E. Rectified linear units improve restricted boltzmann machines. In Proceedings of the 27th International Conference on Machine Learning (ICML-10), Haifa, Israel, 21–24 July 2010; pp. 807–814. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Liao, R.; Tao, X.; Li, R.; Ma, Z.; Jia, J. Video super-resolution via deep draft-ensemble learning. In Proceedings of the IEEE International Conference on Computer Vision, Araucano Park, Las Condes, Chile, 11–18 December 2015; pp. 531–539. [Google Scholar]
- Caballero, J.; Ledig, C.; Aitken, A.; Acosta, A.; Totz, J.; Wang, Z.; Shi, W. Real-time video super-resolution with spatio-temporal networks and motion compensation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4778–4787. [Google Scholar]
- Johnson, J.; Alahi, A.; Fei-Fei, L. Perceptual losses for real-time style transfer and super-resolution. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 694–711. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Canny, J. A computational approach to edge detection. In Readings in Computer Vision; Morgan Kaufmann: Burlington, MA, USA, 1987; pp. 184–203. [Google Scholar]
- Xie, S.; Tu, Z. Holistically-nested edge detection. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1395–1403. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Tao, M.; Bai, J.; Kohli, P.; Paris, S. Simple Flow: A Non-iterative, Sublinear Optical Flow Algorithm. In Computer Graphics Forum; Blackwell Publishing Ltd.: Oxford, UK, 2012; pp. 345–353. [Google Scholar]
- Baker, S.; Scharstein, D.; Lewis, J.P.; Roth, S.; Black, M.J.; Szeliski, R. A database and evaluation methodology for optical flow. Int. J. Comput. Vis. 2011, 92, 1–31. [Google Scholar] [CrossRef]
- Le Feuvre, J.; Thiesse, J.M.; Parmentier, M.; Raulet, M.; Daguet, C. Ultra high definition HEVC DASH data set. In Proceedings of the 5th ACM Multimedia Systems Conference, Singapore, 19 March 2014; ACM: New York, NY, USA, 2014; pp. 7–12. [Google Scholar]
- Song, L.; Tang, X.; Zhang, W.; Yang, X.; Xia, P. The SJTU 4K video sequence dataset. In Proceedings of the IEEE 2013 Fifth International Workshop on Quality of Multimedia Experience (QoMEX), Klagenfurt am Wörthersee, Austria, 3 July 2013; pp. 34–35. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Beauty | Bosphorus | HoneyBee | Jockey | ReadySteadyGo | ShakeNDry | YachtRide | Average | |
|---|---|---|---|---|---|---|---|---|
| Y | Y | Y | Y | Y | Y | Y | Y | |
| SepConv-l1 | 30.44 | 39.61 | 37.93 | 22.66 | 21.33 | 32.39 | 28.79 | 30.45 |
| SepConv-lf | 29.64 | 39.33 | 36.60 | 22.64 | 21.15 | 31.86 | 28.39 | 29.95 |
| SuperSloMo | 30.15 | 40.26 | 37.79 | 22.79 | 22.13 | 32.42 | 29.43 | 30.71 |
| Ours | 30.38 | 39.96 | 38.53 | 22.86 | 22.34 | 33.80 | 30.34 | 31.17 |
| Beauty | Bosphorus | HoneyBee | Jockey | ReadySteadyGo | ShakeNDry | YachtRide | Average | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | |
| SepConv-l1 | 36.04 | 38.32 | 47.42 | 45.55 | 42.71 | 41.95 | 34.47 | 34.19 | 36.18 | 36.44 | 41.16 | 41.29 | 42.18 | 40.35 | 40.02 | 39.72 |
| SepConv-lf | 34.95 | 37.17 | 46.91 | 45.18 | 42.12 | 41.45 | 34.73 | 34.91 | 35.93 | 36.13 | 40.72 | 41.11 | 41.69 | 39.91 | 39.57 | 39.40 |
| SuperSloMo | 35.46 | 37.72 | 47.59 | 45.93 | 42.56 | 41.91 | 34.89 | 34.82 | 36.54 | 36.06 | 41.11 | 41.45 | 41.53 | 40.83 | 39.95 | 39.81 |
| Ours | 35.87 | 38.10 | 46.75 | 44.97 | 42.77 | 42.10 | 34.67 | 34.90 | 36.72 | 36.78 | 41.50 | 41.62 | 42.25 | 40.45 | 40.07 | 39.84 |
| Beauty | Bosphorus | HoneyBee | Jockey | ReadySteadyGo | ShakeNDry | YachtRide | Average | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | |
| SepConv-l1 | 0.831 | 0.895 | 0.985 | 0.979 | 0.961 | 0.947 | 0.951 | 0.945 | 0.947 | 0.946 | 0.949 | 0.950 | 0.968 | 0.960 | 0.942 | 0.946 |
| SepConv-lf | 0.787 | 0.862 | 0.982 | 0.976 | 0.954 | 0.940 | 0.942 | 0.933 | 0.941 | 0.939 | 0.943 | 0.943 | 0.963 | 0.953 | 0.930 | 0.935 |
| SuperSloMo | 0.809 | 0.879 | 0.985 | 0.979 | 0.960 | 0.947 | 0.941 | 0.934 | 0.944 | 0.943 | 0.948 | 0.947 | 0.968 | 0.959 | 0.936 | 0.941 |
| Ours | 0.819 | 0.880 | 0.982 | 0.977 | 0.978 | 0.954 | 0.953 | 0.947 | 0.948 | 0.947 | 0.951 | 0.953 | 0.972 | 0.964 | 0.943 | 0.946 |
| BundNightsc. | CampfirePar. | Construction. | Fountains | Library | Marathon | Residential. | Runners | |
| Y | Y | Y | Y | Y | Y | Y | Y | |
| SepConv-l1 | 33.18 | 21.85 | 37.91 | 28.43 | 39.49 | 31.61 | 40.03 | 27.81 |
| SepConv-lf | 32.98 | 21.82 | 37.42 | 27.43 | 38.68 | 31.02 | 39.49 | 27.73 |
| SuperSloMo | 32.53 | 21.59 | 37.68 | 28.10 | 37.94 | 31.36 | 37.16 | 27.85 |
| Ours | 33.48 | 22.92 | 38.10 | 29.73 | 39.40 | 32.39 | 39.73 | 27.79 |
| RushHour | Scarf | TallBuildings | TrafficAndB. | TrafficFlow | TreeShade | Wood | Average | |
| Y | Y | Y | Y | Y | Y | Y | Y | |
| SepConv-l1 | 32.49 | 37.60 | 40.32 | 39.68 | 34.27 | 37.04 | 37.25 | 34.60 |
| SepConv-lf | 32.24 | 37.24 | 38.07 | 39.34 | 33.32 | 36.79 | 36.98 | 34.04 |
| SuperSloMo | 32.60 | 36.65 | 36.28 | 38.17 | 32.77 | 35.70 | 34.76 | 33.41 |
| Ours | 32.78 | 37.41 | 40.54 | 39.73 | 35.41 | 37.25 | 37.48 | 34.94 |
| BundNightsc. | CampfirePar. | Construction. | Fountains | Library | Marathon | Residential. | Runners | |||||||||
| Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | |
| SepConv-l1 | 43.83 | 40.87 | 24.44 | 30.24 | 46.45 | 45.22 | 47.40 | 44.24 | 46.67 | 45.33 | 40.69 | 40.12 | 45.31 | 43.11 | 38.96 | 38.57 |
| SepConv-lf | 43.51 | 40.53 | 24.23 | 30.10 | 46.41 | 45.17 | 46.52 | 43.36 | 46.18 | 44.80 | 40.36 | 39.76 | 45.08 | 42.85 | 38.85 | 38.50 |
| SuperSloMo | 42.58 | 39.73 | 24.10 | 29.98 | 45.78 | 44.42 | 46.02 | 42.93 | 45.57 | 43.83 | 40.28 | 39.71 | 44.66 | 41.90 | 38.16 | 38.20 |
| Ours | 43.28 | 40.78 | 24.20 | 29.98 | 46.70 | 45.37 | 46.28 | 42.67 | 45.68 | 44.48 | 40.99 | 40.27 | 47.12 | 46.19 | 39.53 | 39.22 |
| RushHour | Scarf | TallBuildings | TrafficAndB. | TrafficFlow | TreeShade | Wood | Average | |||||||||
| Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | |
| SepConv-l1 | 45.62 | 44.51 | 44.40 | 44.31 | 46.14 | 44.10 | 47.89 | 46.71 | 45.14 | 44.80 | 44.69 | 46.80 | 43.13 | 41.18 | 43.38 | 42.67 |
| SepConv-lf | 45.31 | 44.23 | 44.32 | 44.21 | 46.12 | 44.11 | 47.77 | 46.60 | 44.49 | 44.36 | 44.57 | 46.68 | 42.75 | 40.82 | 43.10 | 42.41 |
| SuperSloMo | 44.48 | 43.59 | 42.50 | 43.01 | 45.47 | 42.97 | 46.78 | 45.45 | 43.68 | 43.08 | 43.35 | 45.51 | 42.42 | 39.67 | 42.39 | 41.60 |
| Ours | 45.45 | 44.31 | 44.57 | 44.44 | 47.76 | 46.68 | 48.56 | 47.28 | 46.02 | 45.06 | 45.60 | 47.13 | 43.50 | 41.86 | 43.68 | 43.04 |
| BundNightsc. | CampfirePar. | Construction. | Fountains | Library | Marathon | Residential. | Runners | |
| Y | Y | Y | Y | Y | Y | Y | Y | |
| SepConv-l1 | 0.944 | 0.831 | 0.903 | 0.812 | 0.939 | 0.819 | 0.956 | 0.885 |
| SepConv-lf | 0.932 | 0.811 | 0.890 | 0.775 | 0.923 | 0.784 | 0.949 | 0.876 |
| SuperSloMo | 0.944 | 0.819 | 0.911 | 0.809 | 0.937 | 0.818 | 0.948 | 0.877 |
| Ours | 0.932 | 0.828 | 0.910 | 0.804 | 0.932 | 0.812 | 0.951 | 0.868 |
| RushHour | Scarf | TallBuildings | TrafficAndB. | TrafficFlow | TreeShade | Wood | Average | |
| Y | Y | Y | Y | Y | Y | Y | Y | |
| SepConv-l1 | 0.926 | 0.941 | 0.963 | 0.954 | 0.905 | 0.941 | 0.953 | 0.911 |
| SepConv-lf | 0.916 | 0.931 | 0.958 | 0.948 | 0.887 | 0.936 | 0.945 | 0.897 |
| SuperSloMo | 0.926 | 0.939 | 0.953 | 0.951 | 0.905 | 0.938 | 0.946 | 0.908 |
| Ours | 0.926 | 0.939 | 0.978 | 0.962 | 0.918 | 0.950 | 0.966 | 0.911 |
| BundNightsc. | CampfirePar. | Construction. | Fountains | Library | Marathon | Residential. | Runners | |||||||||
| Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | |
| SepConv-l1 | 0.982 | 0.979 | 0.834 | 0.905 | 0.980 | 0.974 | 0.985 | 0.975 | 0.984 | 0.980 | 0.961 | 0.953 | 0.979 | 0.972 | 0.967 | 0.964 |
| SepConv-lf | 0.980 | 0.976 | 0.821 | 0.893 | 0.980 | 0.973 | 0.982 | 0.970 | 0.982 | 0.979 | 0.957 | 0.948 | 0.978 | 0.972 | 0.965 | 0.962 |
| SuperSloMo | 0.980 | 0.976 | 0.825 | 0.896 | 0.979 | 0.974 | 0.983 | 0.971 | 0.983 | 0.979 | 0.959 | 0.951 | 0.980 | 0.971 | 0.959 | 0.956 |
| Ours | 0.979 | 0.976 | 0.823 | 0.892 | 0.981 | 0.974 | 0.981 | 0.968 | 0.983 | 0.980 | 0.960 | 0.951 | 0.983 | 0.983 | 0.967 | 0.964 |
| RushHour | Scarf | TallBuildings | TrafficAndB. | TrafficFlow | TreeShade | Wood | Average | |||||||||
| Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | Cb | Cr | |
| SepConv-l1 | 0.983 | 0.981 | 0.982 | 0.980 | 0.981 | 0.975 | 0.988 | 0.984 | 0.979 | 0.977 | 0.985 | 0.984 | 0.972 | 0.967 | 0.969 | 0.970 |
| SepConv-lf | 0.981 | 0.979 | 0.981 | 0.980 | 0.982 | 0.975 | 0.987 | 0.983 | 0.977 | 0.975 | 0.984 | 0.983 | 0.971 | 0.965 | 0.967 | 0.968 |
| SuperSloMo | 0.981 | 0.979 | 0.977 | 0.976 | 0.983 | 0.973 | 0.986 | 0.982 | 0.977 | 0.975 | 0.982 | 0.982 | 0.971 | 0.960 | 0.967 | 0.967 |
| Ours | 0.983 | 0.980 | 0.982 | 0.981 | 0.987 | 0.985 | 0.988 | 0.985 | 0.980 | 0.976 | 0.986 | 0.985 | 0.978 | 0.976 | 0.969 | 0.970 |
| Running Time (ms) | Memory Usage (GB) | |
|---|---|---|
| SepConv-(l1,lf) | 1670 | 19.42 |
| SuperSloMo | 1080 | 15.90 |
| Ours | 620 | 4.52 |
| First Sample | Second Sample | Third Sample | ||||
|---|---|---|---|---|---|---|
| PSNR | SSIM | PSNR | SSIM | PSNR | SSIM | |
| SepConv-l1 | 22.22 | 0.826 | 29.83 | 0.929 | 20.06 | 0.470 |
| SepConv-lf | 22.50 | 0.825 | 28.24 | 0.913 | 19.65 | 0.402 |
| SuperSloMo | 20.61 | 0.798 | 31.57 | 0.936 | 20.21 | 0.417 |
| Ours | 24.21 | 0.854 | 31.80 | 0.945 | 21.74 | 0.468 |
| Ultra Video | SJTU 4K Video | |||
|---|---|---|---|---|
| PSNR | SSIM | PSNR | SSIM | |
| Without edge loss | 37.98 | 0.919 | 41.76 | 0.956 |
| TI + * | 36.51 | 0.856 | 39.47 | 0.883 |
| TI + VDSR [18] | 35.27 | 0.850 | 38.44 | 0.878 |
| Without and | 36.05 | 0.862 | 39.82 | 0.898 |
| Full model | 37.02 | 0.917 | 40.55 | 0.950 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahn, H.-E.; Jeong, J.; Kim, J.W. A Fast 4K Video Frame Interpolation Using a Hybrid Task-Based Convolutional Neural Network. Symmetry 2019, 11, 619. https://doi.org/10.3390/sym11050619
Ahn H-E, Jeong J, Kim JW. A Fast 4K Video Frame Interpolation Using a Hybrid Task-Based Convolutional Neural Network. Symmetry. 2019; 11(5):619. https://doi.org/10.3390/sym11050619
Chicago/Turabian StyleAhn, Ha-Eun, Jinwoo Jeong, and Je Woo Kim. 2019. "A Fast 4K Video Frame Interpolation Using a Hybrid Task-Based Convolutional Neural Network" Symmetry 11, no. 5: 619. https://doi.org/10.3390/sym11050619
APA StyleAhn, H.-E., Jeong, J., & Kim, J. W. (2019). A Fast 4K Video Frame Interpolation Using a Hybrid Task-Based Convolutional Neural Network. Symmetry, 11(5), 619. https://doi.org/10.3390/sym11050619