Intuitionistic Type-2 Fuzzy Set and Its Properties

 ,
, 
Abstract
:1. Introduction
- (i)
- The concept of a generalized intuitionistic type-2 fuzzy set is proposed.
- (ii)
- Some set-theoretic operations including the union, intersection, and complement of IT2FS are presented.
- (iii)
- Several properties of IT2FS like , , , , and are proposed.
- (iv)
- Possibility and necessity operators of IT2FS are investigated.
- (v)
- Two distance measures, the Hamming distance and Euclidian distance, are proposed in this study.
- (vi)
- A suitable application based on a medical diagnosis system is presented, where the distance measures of IT2FS are used.
2. Preliminaries
2.1. Type-2 Fuzzy Set
2.2. Intuitionistic Fuzzy Set
3. Intuitionistic Type-2 Fuzzy Set
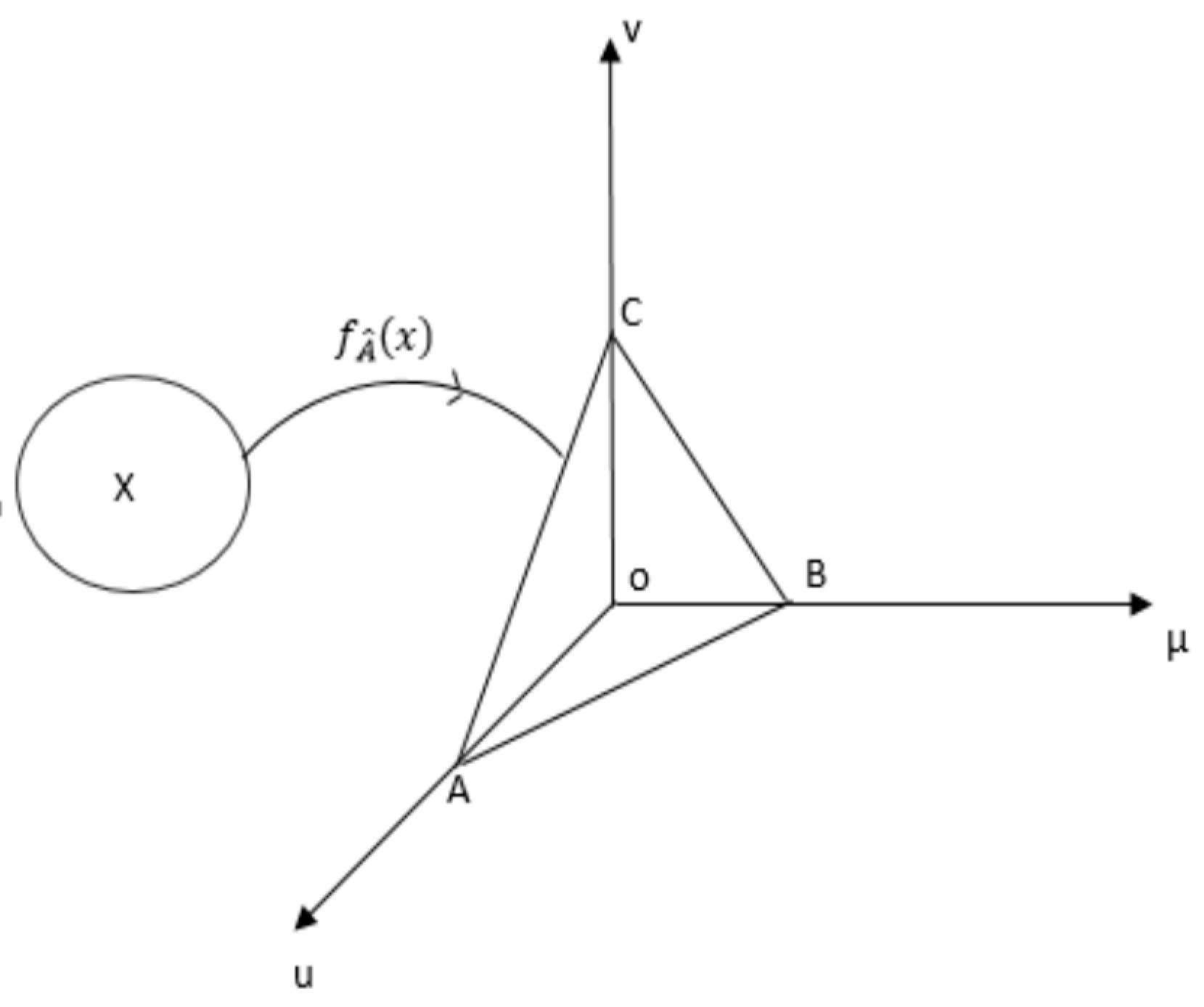
4. Geometrical Interpretation of the Intuitionistic Type-2 Fuzzy Set
5. Operations on IT2FS
6. Properties of IT2FS
- (i)
- (ii)
- (iii)
- (iv)
- (v)
- (vi)
7. Necessity and Possibility Operators on IT2FS
- (i)
- Necessity operator:
- (ii)
- Possibility operator:The operators can also be represented as:and:For the discrete case, is replaced by .Obviously, if is an ordinary T2FS, then . Let us now explain this idea by an example.
Proposition
- (i)
- (ii)
- (iii)
- (iv)
- (v)
- (vi)
- (vii)
- (i)
- (ii)
- (iii)
- (iv)
- (v)
- (vi)
- (vii)
- (i)
- (ii)
- (iii)
- (iv)
- (i)
- (ii)
- .
- (iii)
- (iv)
- (i)
- (ii)
- (iii)
- (i)
- .Therefore,Hence,Therefore,On the other hand, if , then:This implies .
- (ii)
- .Therefore,Hence,Therefore,On the other hand, if:then:This gives .
- (iii)
- and :and:Hence:Therefore,On the other hand, if:then:i.e.,and:Hence, . □
8. Distance Measures of IT2FS
- (i)
- Hamming distance:
- (ii)
- Euclidean distance:where and are the primary membership functions of and , respectively. and are the corresponding secondary membership and non-membership functions of ; whereas, and are the corresponding secondary membership and non-membership functions of . is the length of the sequences of the secondary membership and non-membership functions of:and:respectively. For the sake of simplicity, in this study, the length of the sequences of the secondary membership and non-membership functions of and are considered equal.Let us now explain this idea with an example.
9. An Example
10. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Castillo, O. Introduction to Type-2 Fuzzy Logic Control Type-2 Fuzzy Logic in Intelligent Control Applications; Springer: Berlin/Heidelberg, Germany, 2012; Volume 272, pp. 3–5. [Google Scholar]
- Castillo, O.; Melin, P. Type-2 Fuzzy Logic: Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Melin, P.; Mendoza, O.; Castillo, O. An improved method for edge detection based on interval type-2 fuzzy logic. Expert Syst. Appl. 2010, 37, 8527–8535. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Nagoorgani, A.; Ponnalagu, R. A new approach on solving intuitionistic fuzzy linear programming problem. Appl. Math. Sci. 2012, 6, 3467–3474. [Google Scholar]
- Mahapatra, G.S.; Roy, T.K. Intuitionistic fuzzy number and its arithmetic operation with application on system failure. J. Uncertain Syst. 2013, 7, 92–107. [Google Scholar]
- Atanassov, K. Intuitionistic Fuzzy Sets: Theory and Applications; Springer: New York, NY, USA, 1999. [Google Scholar]
- Atanassov, K.T. Intuitionistic fuzzy sets. Fuzzy Sets Syst. 1986, 20, 87–96. [Google Scholar] [CrossRef]
- Marasini, D.; Quatto, P.; Ripamonti, E. Fuzzy analysis of students’ ratings. Eval. Rev. 2016, 40, 122–141. [Google Scholar] [CrossRef] [PubMed]
- Marasini, D.; Quatto, P.; Ripamonti, E. Intuitionistic Fuzzy Sets for questionnaire analysis. Qual. Quant. 2016, 50, 767–790. [Google Scholar] [CrossRef]
- Rezvani, S. Ranking method of trapezoidal intuitionistic fuzzy numbers. Ann. Fuzzy Math. Inform. 2013, 5, 515–523. [Google Scholar]
- Seikh, M.R.; Nayak, P.K.; Pal, M. Aspiration level approach to solve matrix games with I-fuzzy goals and I-fuzzy pay-offs. Pac. Sci. Rev. A Nat. Sci. Eng. 2016, 18, 5–13. [Google Scholar] [CrossRef] [Green Version]
- Aloini, D.; Dulmin, R.; Mininno, V. A peer IF-TOPSIS based decision support system for packaging machine selection. Expert Syst. Appl. 2014, 41, 2157–2165. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, Z. Soft computing based on maximizing consensus and fuzzy TOPSIS approach to interval-valued intuitionistic fuzzy group decision making. Appl. Soft Comput. 2015, 26, 42–56. [Google Scholar] [CrossRef]
- Chen, T.Y. The inclusion-based TOPSIS method with interval-valued intuitionistic fuzzy sets for multiple criteria group decision making. Appl. Soft Comput. 2015, 26, 57–73. [Google Scholar] [CrossRef]
- Yue, Z. TOPSIS-based group decision-making methodology in intuitionistic fuzzy setting. Inf. Sci. 2014, 277, 141–153. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets as a basis for a theory of possibility. Fuzzy Sets Syst. 1999, 1, 9–34. [Google Scholar] [CrossRef]
- Zadeh, L.A. The concept of a linguistic variable and its application to approximate reasoning–I. Inf. Sci. 1975, 8, 199–249. [Google Scholar] [CrossRef]
- Zadeh, L.A. The concept of a linguistic variable and its application to approximate reasoning–II. Inf. Sci. 1975, 8, 301–357. [Google Scholar] [CrossRef]
- Mendel, J.M. Advances in type-2 fuzzy sets and systems. Inf. Sci. 2007, 177, 84–110. [Google Scholar] [CrossRef]
- Takac, Z. Aggregation of fuzzy truth values. Inf. Sci. 2014, 271, 1–13. [Google Scholar] [CrossRef]
- Kundu, P.; Kar, S.; Maiti, M. Fixed charge transportation problem with type-2 fuzzy variable. Inf. Sci. 2014, 255, 170–186. [Google Scholar] [CrossRef]
- Mizumoto, M.; Tanaka, K. Some properties of fuzzy sets of type-2. Inf. Control 1976, 31, 312–340. [Google Scholar] [CrossRef]
- Mizumoto, M.; Tanaka, K. Fuzzy sets of type-2 under algebraic product and algebraic sum. Fuzzy Sets Syst. 1981, 5, 277–280. [Google Scholar] [CrossRef]
- Dubois, D.; Prade, H. Fuzzy Sets and Systems: Theory and Applications; Academic Press: New York, NY, USA, 1980. [Google Scholar]
- Coupland, S.; John, R. A fast geometric method for defuzzification of type-2 fuzzy sets. IEEE Trans. Fuzzy Syst. 2008, 16, 929–941. [Google Scholar] [CrossRef]
- Greenfield, S.; John, R.I.; Coupland, S. A Novel Sampling Method for Type-2 Defuzzification. 2005. Available online: http://hdl.handle.net/2086/980 (accessed on 2 June 2019).
- Karnik, N.N.; Mendel, J.M. Centroid of a type-2 fuzzy set. Inf. Sci. 2001, 132, 195–220. [Google Scholar] [CrossRef]
- Kar, M.B.; Roy, B.; Kar, S.; Majumder, S.; Pamucar, D. Type-2 multi-fuzzy sets and their applications in decision making. Symmetry 2019, 11, 170. [Google Scholar] [CrossRef]
- Garca, J.C.F. Solving fuzzy linear programming problems with interval type-2 RHS. In Proceedings of the IEEE International Conference on System, Man and Cybernetics, San Antonio, TX, USA, 11–14 October 2009; pp. 262–267. [Google Scholar]
- Hasuike, T.; Ishi, H. A type-2 fuzzy portfolio selection problem considering possibilistic measure and crisp possibilistic mean value. In Proceedings of the International Fuzzy Systems Association World Congress and European Society for Fuzzy Logic and Technology Conference (IFSA-EUSFLAT), Lisbon, Portugal, 20–24 July 2009; pp. 1120–1125. [Google Scholar]
- Hidalgo, D.; Melin, P.; Castillo, O. An optimization method for designing type-2 fuzzy inference systems based on the footprint of uncertainty using genetic algorithms. Expert Syst. Appl. 2012, 39, 4590–4598. [Google Scholar] [CrossRef]
- Kundu, P.; Majumder, S.; Kar, S.; Maiti, M. A method to solve linear programming problem with interval type-2 fuzzy parameters. Fuzzy Optim. Decis. Mak. 2019, 18, 103–130. [Google Scholar] [CrossRef]
- Pramanik, S.; Jana, D.K.; Mondal, S.K.; Maiti, M. A fixed-charge transportation problem in two-stage supply chain network in Gaussian type-2 fuzzy environments. Inf. Sci. 2015, 325, 190–214. [Google Scholar] [CrossRef]
- Singh, S.; Garg, H. Symmetric triangular interval type-2 intuitionistic fuzzy sets with their applications in multi criteria decision. Symmetry 2018, 10, 401. [Google Scholar] [CrossRef]
- Garg, H.; Singh, S. A novel triangular interval type-2 intuitionistic fuzzy set and their aggregation operators. Iran. J. Fuzzy Syst. 2018, 15, 69–93. [Google Scholar]
- Mendel, J.M.; John, R.I. Type-2 fuzzy sets made simple. IEEE Trans. Fuzzy Syst. 2002, 10, 307–315. [Google Scholar] [CrossRef]


{kind=link}
| Temperature | ||||
| Cough | ||||
| Throat Pain | ||||
| Headache | ||||
| Chest pain |
| P1 | 1.1600 | 1.2300 | 1.1300 | 1.0400 |
| P2 | 0.5800 | 1.0700 | 0.7500 | 0.6800 |
| P3 | 1.0600 | 1.0700 | 1.0100 | 1.0600 |
| P4 | 1.1700 | 0.8200 | 1.3400 | 1.0700 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dan, S.; Kar, M.B.; Majumder, S.; Roy, B.; Kar, S.; Pamucar, D. Intuitionistic Type-2 Fuzzy Set and Its Properties. Symmetry 2019, 11, 808. https://doi.org/10.3390/sym11060808
Dan S, Kar MB, Majumder S, Roy B, Kar S, Pamucar D. Intuitionistic Type-2 Fuzzy Set and Its Properties. Symmetry. 2019; 11(6):808. https://doi.org/10.3390/sym11060808
Chicago/Turabian StyleDan, Surajit, Mohuya B. Kar, Saibal Majumder, Bikashkoli Roy, Samarjit Kar, and Dragan Pamucar. 2019. "Intuitionistic Type-2 Fuzzy Set and Its Properties" Symmetry 11, no. 6: 808. https://doi.org/10.3390/sym11060808
APA StyleDan, S., Kar, M. B., Majumder, S., Roy, B., Kar, S., & Pamucar, D. (2019). Intuitionistic Type-2 Fuzzy Set and Its Properties. Symmetry, 11(6), 808. https://doi.org/10.3390/sym11060808