A New on-Demand Recharging Strategy Based on Cycle-Limitation in a WRSN


Abstract
:1. Introduction
- (1)
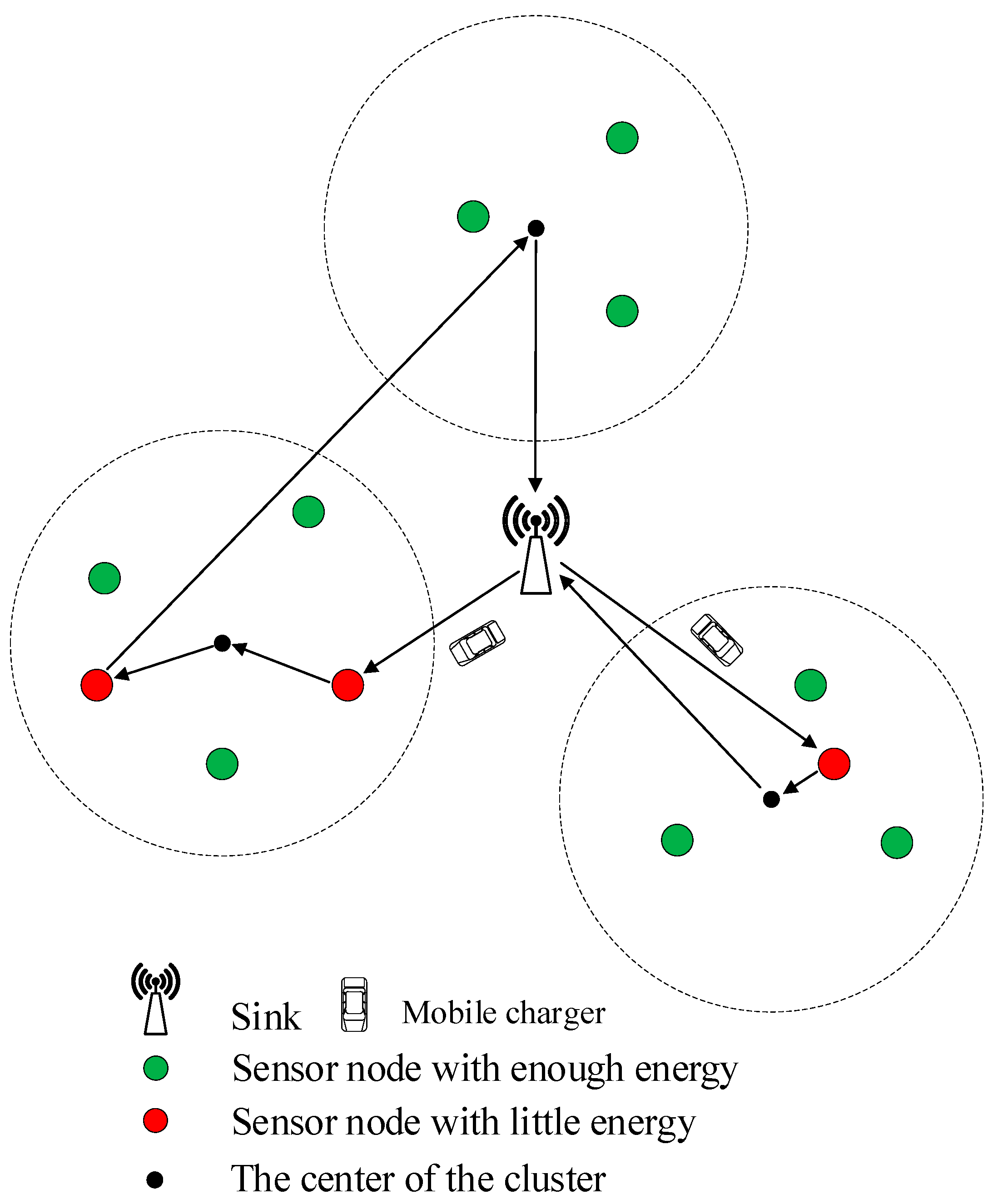
- Although simultaneous data gathering and charging is the best way to enhance the charging efficiency of mobile chargers, this is difficult to achieve with current technology. In this paper, we used a K-means algorithm to divide all sensor nodes in a region that only for mobile chargers to gather data from sensor nodes [19]. We also used the NJNP charging strategy to schematize the charging path. The clustering centers were added in the charging path to allow the mobile charger to gather the data. The mobile chargers only moved to the sensor nodes for energy charging and finished the task of data gathering at the centers of the clusters;
- (2)
- As the charging queue was calculated completely, we proposed the Periodically Restricted Dynamic Mobile Chargers (PRDMCs) algorithm to cut the charging path; the original charging path was divided into several parts and corresponded to several mobile chargers. The number of mobile chargers after cutting was the appropriate number. At the same time, to make sure that the sensing data could be gathered at a certain time, we also discussed the maximum service time of each mobile charger;
- (3)
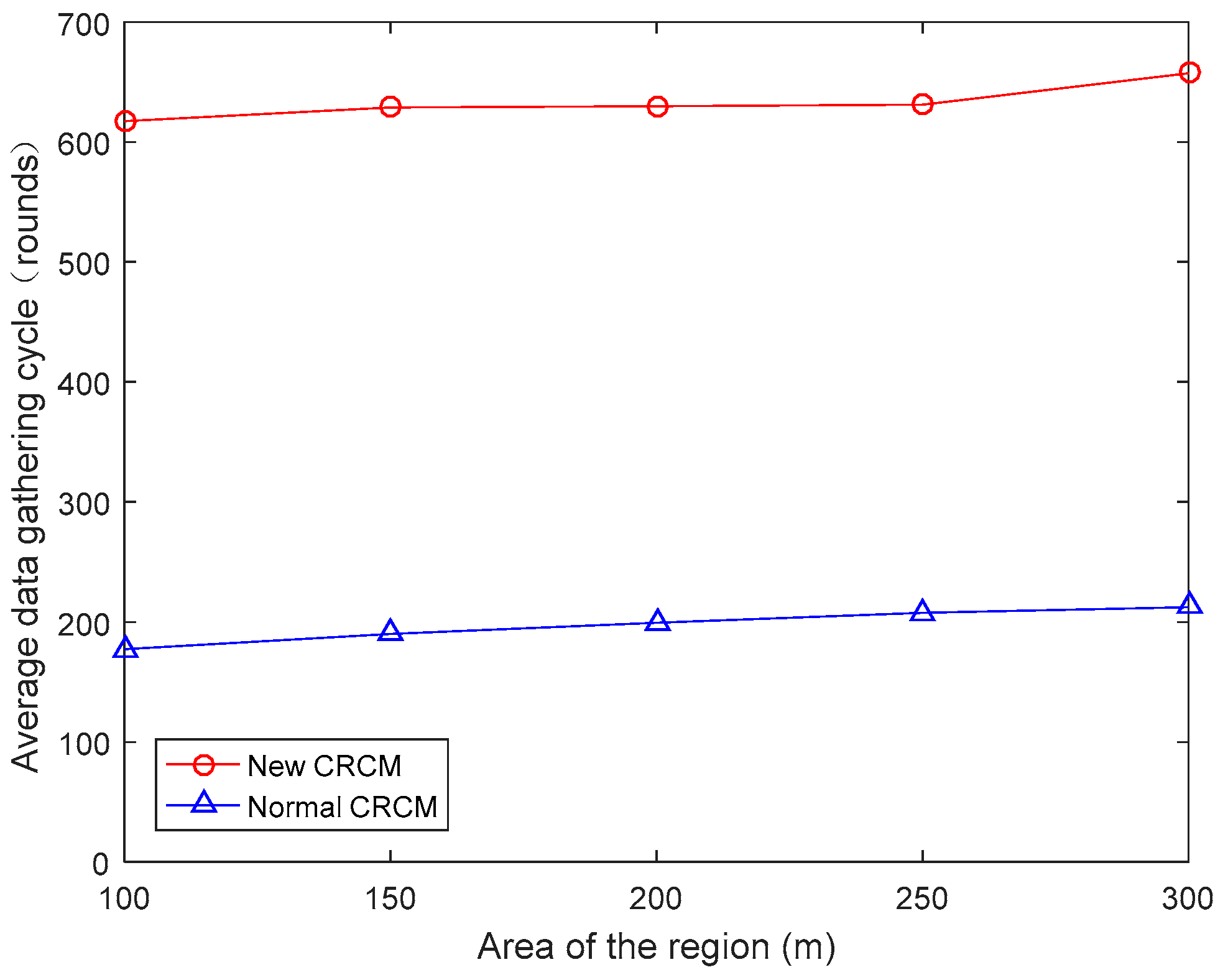
- We compared our algorithms with the normal CRCM in terms of the data acquisition cycle, etc. The results suggest that by increasing the number of mobile chargers, the length of the data acquisition cycle can be guaranteed.
2. Related Works
3. System Model
3.1. Network Model of the New CRCM
3.2. Network Model of the New CRCM
3.3. Model of Mobile Charger Energy Consumption
4. Proposed Strategy
4.1. Clustering of the New CRCM
4.2. Planning the Charging Path
4.3. Periodically Restricted Dynamic Mobile Chargers
| Algorithm 1. The Periodically Restricted Dynamic Mobile Chargers (PRDMCs) algorithm. |
| 1: Input: The queue , count number , and length of |
| 2: Output: The number of mobile chargers |
| 3: |
| 4: |
| 5: let be the length of |
| 6: if or then |
| 7: |
| 8: for All do |
| 9: Calculate the waiting times and |
| 10: end for |
| 11: Calculate the |
| 12: if then |
| 13: |
| 14: end if |
| 15: while do |
| 16: if then |
| 17: |
| 18: else |
| 19: Remove the elements from 2 to and update the |
| 20: |
| 21: |
| 22: update the |
| 23: for All do |
| 24: Calculate the waiting times and |
| 25: end for |
| 26: end if |
| 27: if then |
| 28: |
| 29: end if |
| 30: end while |
| 31: end if |
| 32: Return: |
5. Simulations
5.1. Simulation Parameters
5.2. Distribution and Clustering of Sensor Nodes
5.3. Residual Energy of One Sensor Node
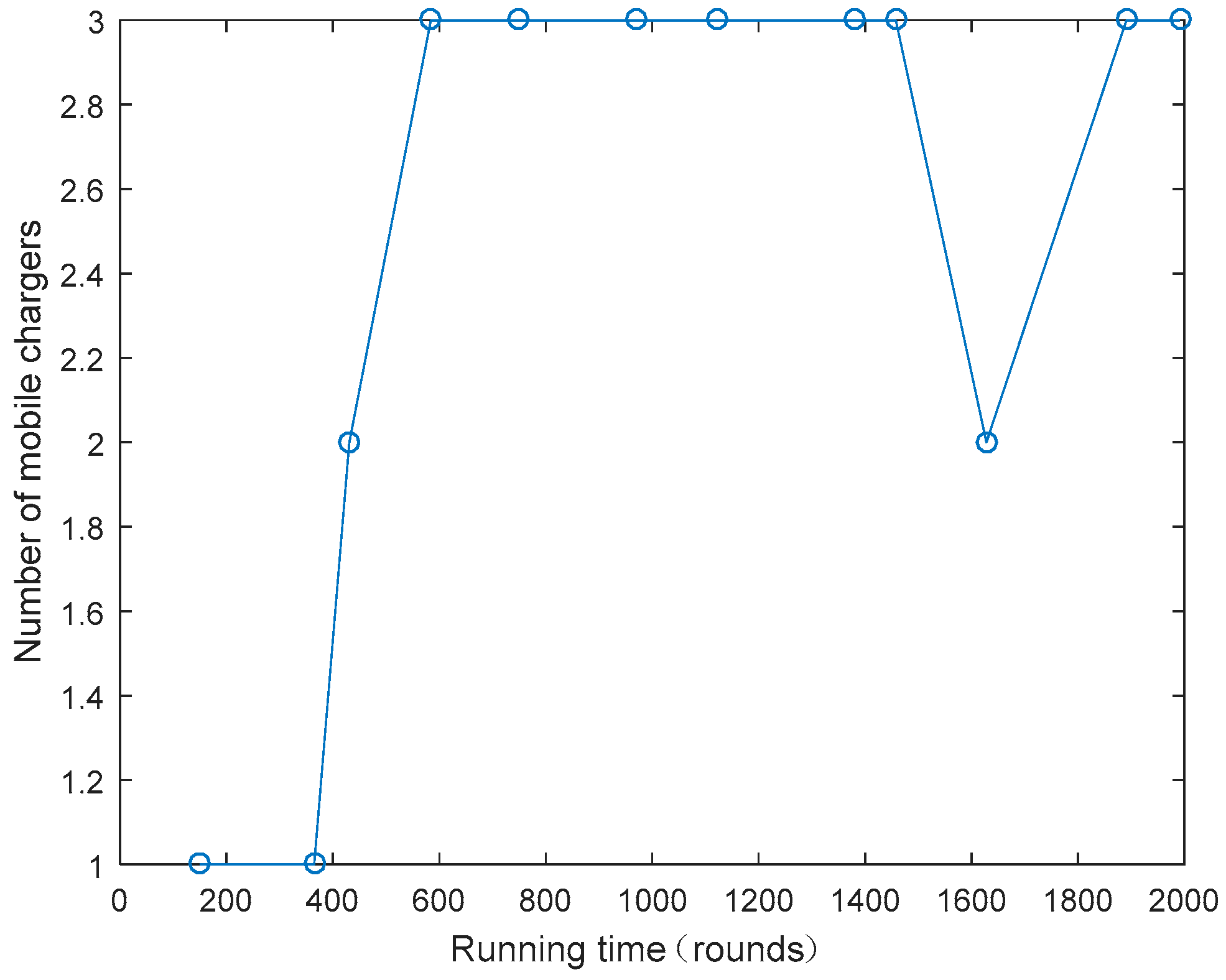
5.4. Number of Mobile Chargers Used in Each Charging Cycle
5.5. Charging Path of Mobile Chargers
5.6. Average Service Time of Mobile Chargers in Each Charging Cycle
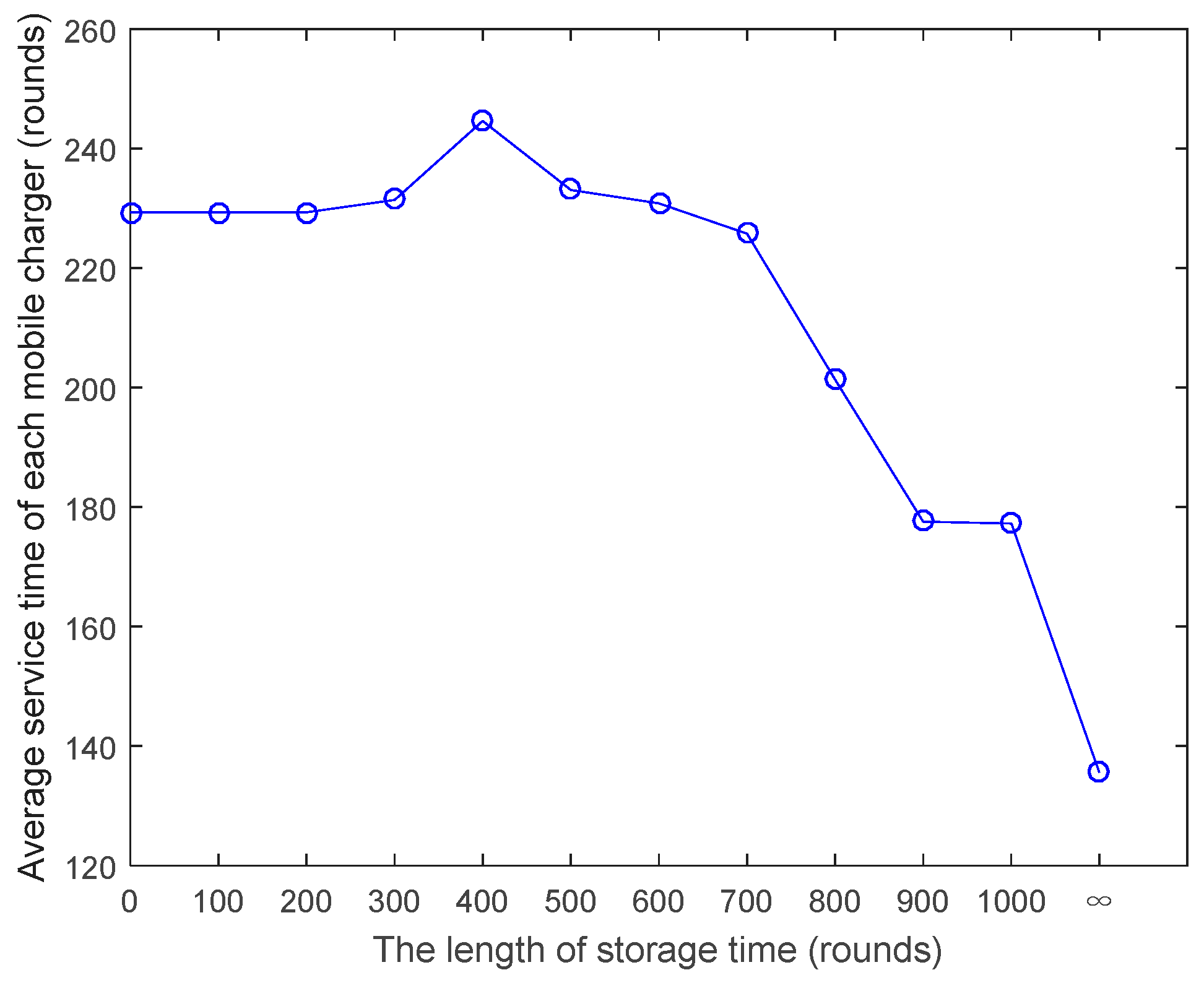
5.7. Length of Storage Time
5.8. Average Data Gathering Cycle
5.9. Average Number of Mobile Chargers Used in Each Charging Cycle
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- García-Hernández, C.F.; Ibarguengoytia-Gonzalez, P.H.; García-Hernández, J.; Pérez-Díaz, J.A. Wireless sensor networks and applications: A survey. Int. J. Comput. Sci. Netw. Secur. 2007, 7, 264–273. [Google Scholar]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Jing, Q.; Vasilakos, A.V.; Wan, J.; Lu, J.; Qiu, D. Security of the Internet of Things: Perspectives and challenges. Wirel. Netw. 2014, 20, 2481–2501. [Google Scholar] [CrossRef]
- Pan, J.S.; Dao, T.K. A Novel Improved Bat Algorithm Based on Hybrid Parallel and Compact for Balancing an Energy Consumption Problem. Information 2019, 10, 194. [Google Scholar] [CrossRef]
- Chen, J.; Hu, K.; Wang, Q.; Sun, Y.; Shi, Z.; He, S. Narrow-Band Internet of Things: Implementations and Applications. IEEE Internet Things J. 2017, 4, 2309–2314. [Google Scholar] [CrossRef]
- Casares-Giner, V.; Navas, T.I.; Flórez, D.S. End to End Delay and Energy Consumption in a Two Tier Cluster Hierarchical Wireless Sensor Networks. Information 2019, 10, 135. [Google Scholar] [CrossRef]
- Yang, Y.Y.; Wang, C. Wireless Rechargeable Sensor Networks; Springer: Berlin/Heidelberg, Germany, 2015; pp. 1–53. [Google Scholar]
- Ren, P.; Wang, Y.; Du, Q. CAD-MAC: A Channel-Aggregation Diversity Based MAC Protocol for Spectrum and Energy Efficient Cognitive Ad Hoc Networks. IEEE J. Sel. Areas Commun. 2014, 32, 237–250. [Google Scholar]
- Zhang, J.; Wu, C.; Zhang, Y.; Ji, P. Energy-efficient Adaptive Dynamic Sensor Scheduling for Target Monitoring in Wireless Sensor Networks. ETRI J. 2011, 33, 857–863. [Google Scholar] [CrossRef]
- Luo, J.; Panchard, J.; Piórkowski, M.; Grossglauser, M.; Hubaux, J.P. MobiRoute: Routing Towards a Mobile Sink for Improving Lifetime in Sensor Networks. In Distributed Computing in Sensor Systems; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Nitesh, K.; Azharuddin, M.; Jana, P.K. A novel approach for designing delay efficient path for mobile sink in wireless sensor networks. Wirel. Netw. 2018, 24, 2337–2356. [Google Scholar] [CrossRef]
- Tong, B.; Li, Z.; Wang, G.; Zhang, W. How Wireless Power Charging Technology Affects Sensor Network Deployment and Routing. In Proceedings of the 2010 International Conference on Distributed Computing Systems (ICDCS 2010), Genova, Italy, 21–25 June 2010. [Google Scholar]
- Kansal, A.; Hsu, J.; Zahedi, S.; Srivastava, M.B. Power management in energy harvesting sensor networks. ACM Trans. Embed. Comput. Syst. 2007, 6, 32. [Google Scholar] [CrossRef]
- Xie, L.; Shi, Y.; Hou, Y.T.; Lou, W.; Sherali, H.D. On traveling path and related problems for a mobile station in a rechargeable sensor network. In Proceedings of the Fourteenth ACM International Symposium on Mobile Ad Hoc Networking & Computing, Bangalore, India, 29 July–1 August 2013. [Google Scholar]
- He, L.; Gu, Y.; Pan, J.; Zhu, T. On-demand Charging in Wireless Sensor Networks: Theories and Applications. In Proceedings of the 2013 IEEE 10th International Conference on Mobile Ad-Hoc and Sensor Systems, Hangzhou, China, 14–16 October 2013. [Google Scholar]
- Zhao, L.; Tang, Q. An Improved Threshold-Sensitive Stable Election Routing Energy Protocol for Heterogeneous Wireless Sensor Networks. Information 2019, 10, 125. [Google Scholar] [CrossRef]
- He, L.; Kong, L.; Gu, Y.; Pan, J.; Zhu, T. Evaluating the On-Demand Mobile Charging in Wireless Sensor Networks. IEEE Trans. Mob. Comput. 2015, 14, 1861–1875. [Google Scholar] [CrossRef]
- Wang, Y.; Dong, Y.; Li, S.; Wu, H.; Cui, M. CRCM: A New Combined Data Gathering and Energy Charging Model for WRSN. Symmetry 2018, 10, 319. [Google Scholar] [CrossRef]
- Hartigan, J.A.; Wong, M.A. Algorithm AS 136: A K-Means Clustering Algorithm. J. R. Stat. Soc. 1979, 28, 100–108. [Google Scholar] [CrossRef]
- Fragkiadakis, A.; Askoxylakis, I.; Tragos, E. Joint compressed-sensing and matrix-completion for efficient data collection in WSNs. In Proceedings of the IEEE International Workshop on Computer Aided Modeling & Design of Communication Links & Networks, Berlin, Germany, 25–27 September 2013. [Google Scholar]
- Al-Baz, A.; El-Sayed, A. A new algorithm for cluster head selection in LEACH protocol for wireless sensor networks. Int. J. Commun. Syst. 2017, 31, e3407. [Google Scholar] [CrossRef]
- Açıcı, K.; Erdaş, Ç.; Aşuroğlu, T.; Oğul, H. HANDY: A Benchmark Dataset for Context-Awareness via Wrist-Worn Motion Sensors. Data 2018, 3, 24. [Google Scholar] [CrossRef]
- Gambhir, S. OE-LEACH: An optimized energy efficient LEACH algorithm for WSNs. In Proceedings of the Ninth International Conference on Contemporary Computing, Noida, India, 11–13 August 2016. [Google Scholar]
- Xiangning, F.; Yulin, S. Improvement on LEACH protocol of wireless sensor network. In Proceedings of the 2007 International Conference on Sensor Technologies and Applications (SENSORCOMM 2007), Valencia, Spain, 14–20 October 2007; pp. 260–264. [Google Scholar]
- Yun, Y.S.; Xia, Y. Maximizing the Lifetime of Wireless Sensor Networks with Mobile Sink in Delay-Tolerant Applications. IEEE Trans. Mob. Comput. 2010, 9, 1308–1318. [Google Scholar]
- Nguyen, T.D.; Chu, S.I.; Liu, B.H.; Chen, C.H.; Dang, H.S.; Perumal, T. Mobile charging and data gathering in multiple sink wireless sensor networks: How and why. In Proceedings of the International Conference on System Science & Engineering, Ho Chi Minh City, Vietnam, 21–23 July 2017. [Google Scholar]
- Lin, C.; Xue, B.; Wang, Z.; Han, D.; Deng, J.; Wu, G. DWDP: A Double Warning Thresholds with Double Preemptive Scheduling Scheme for Wireless Rechargeable Sensor Networks. In Proceedings of the Neural Information Processing Systems, New York, NY, USA, 24–26 August 2015; pp. 1515–1522. [Google Scholar]
- Lin, C.; Wang, Z.; Han, D.; Wu, Y.; Yu, C.W.; Wu, G. TADP: Enabling temporal and distantial priority scheduling for on-demand charging architecture in wireless rechargeable sensor Networks. J. Syst. Archit. 2016, 70, 26–38. [Google Scholar] [CrossRef]
- Liu, B.H.; Nguyen, N.T.; Pham, V.T.; Lin, Y.X. Novel methods for energy charging and data collection in wireless rechargeable sensor networks. Int. J. Commun. Syst. 2017, 30, e3050. [Google Scholar] [CrossRef]
- Aernouts, M.; Berkvens, R.; Van Vlaenderen, K.; Weyn, M. Sigfox and LoRaWAN Datasets for Fingerprint Localization in Large Urban and Rural Areas. Data 2018, 3, 13. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| sensor node | |
| the center of cluster | |
| the length of the region | |
| charging threshold | |
| the initial energy of each sensor node | |
| the charging efficiency of the mobile charger | |
| the charging power of the mobile charger | |
| the residual energy of sensor node when sending a charging request to the sink | |
| the energy consumption of sensor node | |
| the charging time for sensor node | |
| the time required for the mobile charger to leave sensor node | |
| the time required for data collection when the mobile charger is operating in the center of cluster | |
| energy consumption for 1 bit data transmission in the Free Space Model | |
| energy consumption in the transmitting circuit when dealing with 1 bit data information | |
| the time required for the mobile charger to leave cluster | |
| the time required to collect data from sensor node | |
| the number of clusters | |
| the data size of sensor node | |
| the increase in time after cutting the charging queue | |
| the number of mobile chargers | |
| the moving speed of the mobile charger | |
| the total time required for the charging queue | |
| the length of the storage time | |
| the service time of the mobile charger | |
| the interval time among two charging cycles |
| Parameters | Value |
|---|---|
| Number of nodes | 50 |
| Field size (m2) | |
| Number of clusters | 4 |
| Initial energy of the node (KJ) | 0.5 |
| Energy consumption during communication per datum (nJ/bit) | 50 |
| Speed of the mobile charger (m/s) | 1 |
| Energy conversion rate of mobile chargers (ω) | 0.8 |
| Charging threshold (KJ) | 0.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Dong, Y.; Li, S.; Huang, R.; Shang, Y. A New on-Demand Recharging Strategy Based on Cycle-Limitation in a WRSN. Symmetry 2019, 11, 1028. https://doi.org/10.3390/sym11081028
Wang Y, Dong Y, Li S, Huang R, Shang Y. A New on-Demand Recharging Strategy Based on Cycle-Limitation in a WRSN. Symmetry. 2019; 11(8):1028. https://doi.org/10.3390/sym11081028
Chicago/Turabian StyleWang, Yuhou, Ying Dong, Shiyuan Li, Ruoyu Huang, and Yuhao Shang. 2019. "A New on-Demand Recharging Strategy Based on Cycle-Limitation in a WRSN" Symmetry 11, no. 8: 1028. https://doi.org/10.3390/sym11081028