1. Introduction
There are two types of chaotic synchronization [
1,
2]: chaos phase synchronization (CPS) and chaos complete (or full) synchronization (CS). CPS [
3,
4,
5] is a kind of synchronization by which a chaotic oscillator tunes its internal dynamics’ frequencies according to the effects of an external force or to the behaviors of another selected chaotic system, however, the variations of their amplitudes are still uncorrelated. There is a wide range of distinct systems that demonstrate this type of synchronization in physics, chemistry and biology, in addition to coupled electronic oscillating circuits [
3], plasma evacuation tubes driven by wave generators with low amplitude [
6], globally paired electrochemical oscillator arrays [
7], human visual responses that are phase-locked [
8] and the flow of blood to adjacent operational units inside the kidney [
9].
Considering simple topology systems (e.g., systems whose attractors are of a spiral type and the Rössler system), the chaotic oscillation’s phase
is defined, in the polar coordinate framework of a suitable projection level
as an angle where
. Generally, the boundedness of the phase difference between two chaotic models implies chaotic phase synchronization between them [
10], while CS is achieved when the phase difference approaches zero as time approaches infinity. Similarly, the amplitude of the chaotic signal can be defined instantaneously as
. Two chaotic models realize CPS in situations where those amplitudes are linearly independent (uncorrelated) and chaotic. Applying Hilbert transformation is sometimes carried out to obtain a more comprehensive definition of the chaotic signals’ phase [
11]. In addition, the phase may be defined as a fraction of a complete period.
Via numerical trials, we can monitor the method by which the frequency spectrum harmonics for an obliged chaotic system approach the controlling frequency in a selected period. The switch from phase synchronization behavior to non-synchronization behavior of a controlled chaotic system is shown via certain changes in the Lyapunov exponent and via certain variations in the shape of the Poincaré map. In theory, the major issue is understanding the regulation of the huge group of unsteady cyclic paths that model the state of chaotic synchronization [
12].
The complete synchronization (CS) notion came about through noting [
13] that a couple of similar chaotic systems with suitable conditions can synchronize their changes completely, and the status of synchronization can be stabilized under accidental disturbances. This observation has attracted great attention via its possible utilization in safe communication applications that have become very important [
14,
15]. Theoretically, the great attention on CS is due to the several new ideas and phenomenons it has caused, such as soft attraction [
16], puzzled and mixed basins of attraction [
17], discontinuous intermittence [
18] and bubbling attractors [
19]. Specific attention is given to the design of the attraction basin for the state of chaotic synchronization [
20] and to establishing necessary and sufficient synchronization conditions [
21]. The traditional synchronization condition relying on Lyapunov conditions is not necessary, however it is sufficient. In addition, there is an insufficient alternate case that requires the largest transversal Lyapunov exponent to be negative.
From all of the chaotic systems, the chaotic Lorenz model is commonly selected because it involves numerous characteristics of chaotic behaviors [
22,
23]. For a real framework, it commonly operates in the required stable work regions. Consequently, the tracking of controlled chaotic models (where states are driven to track certain predetermined reference values) has attracted great interest. In [
24], a tracking control method was applied to control the Lorenz model. In [
24], the tracking reference values were supposed to obey certain conditions, and this limited its ability to be applied in several real-world cases. In [
25], the author suggested a new track control technique to avert the restrictions suggested in [
24]. Using fewer sensors in a control strategy is preferred due to lower cost and simple realization.
In [
25,
26,
27], an easy controller with output/state feedback was applied to control a general chaotic model. The studies in [
25,
27,
28] motivated us to propose the single-state feedback track synchronization control technique that is proved in our study here. Furthermore, lack of certainty cannot be avoided in real applications. Consequently, robust control has become a significant aspect of controller design [
25,
28,
29].
Although there is chaos in chaotic systems, they also have symmetrical features. In this research, we show that there is symmetry in the solutions of the chaotic system under study. In addition, synchronization between two chaotic systems means making them symmetrical to each other and this is the main aim of our proposed control strategy. Complete synchronization between two chaotic systems means complete symmetry between them, but phase synchronization means complete symmetry with a phase shift. In this study, based on a genetic algorithm (GA), a novel robust single-state feedback tracking synchronization control of two identical chaotic systems will be proposed. For an alternative approach, the gradient-based (or mathematical programming) method for solving differential-algebraic equation systems, interested readers can refer to [
30] and the references cited there.
The
main aim of this work is to design a new robust scheme by which two important types of chaotic synchronization (i.e., chaotic complete synchronization and chaotic phase synchronization) can be achieved based on a single-state feedback track synchronization control algorithm using the same controller. In addition, the robustness of the proposed controller is proved using a genetic algorithm. A new secure communication plan is also developed relying on the proposed robust single-state feedback track synchronization method as an application. The track control method is applied only to control chaotic systems [
25]. To the best of our knowledge, this is the first time it has been applied in chaos synchronization and it is the first time two types of synchronization using the same controller have been achieved. In addition, phase synchronization is accomplished via a single-state feedback track controller that is less costly than feeding back all system states.
The paper is designed as follows. Following the current section, a novel single-state feedback track synchronization control algorithm is suggested in
Section 2. The proposed algorithm is applied to the synchronization of two identical Lorenz chaotic systems in
Section 3. A robust single-state feedback track synchronization optimal control design is produced in
Section 4. As an application, the proposed robust track synchronization controller is applied to the development of a secure communication scheme in
Section 5. Intensive simulation experiments are also presented in
Section 3,
Section 4 and
Section 5. Our conclusions are presented in
Section 6.
2. Track Synchronization Algorithm
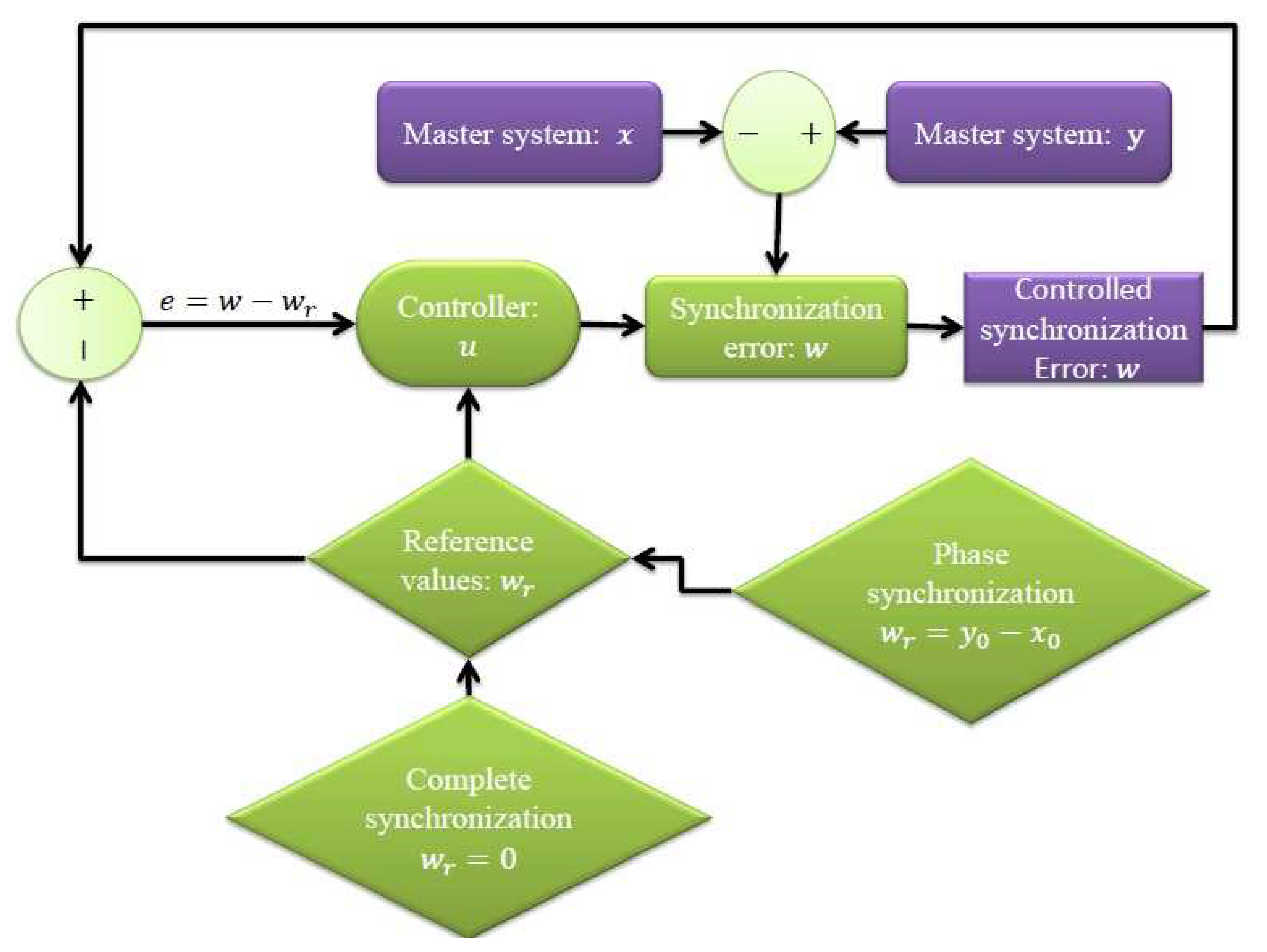
In this section, we propose an algorithm by which the complete and phase synchronization can be done in the same structure (see
Figure 1). The main idea of it is to give reference values for the synchronization errors. If the reference values of the synchronization errors are all zero then a complete synchronization is achieved, but if their values are not equal to zero a phase synchronization is achieved. All previous studies on the phase synchronization were done depending on the stability theory only, which needs to feedback all system states, but here we achieve the phase synchronization based on the proposed single-state feedback track synchronization control algorithm.
Let the states of the n-dimensional master and slave systems be denoted by and , respectively, where ’s are the control signals. The synchronization errors are denoted by . This means that we have three systems: master, slave and synchronization errors systems. Our task is to control the synchronization errors system by proposing a controller such that the synchronization errors track predetermined reference values .
Construct the synchronization errors system .
Construct the track synchronization control signals .
Construct the track synchronization control errors system .
Apply stability criteria to calculate the range of the controller such that the track errors system is asymptotically stable.
If the reference values then a complete synchronization will be reached while a phase synchronization is accomplished if .
Let the master system be denoted by
and the slave synchronized system be denoted by
. Then the synchronization errors system can be constructed as
where
.
The track controller is proposed in such a way that feeding back only one state variable reduces the number of sensors. Assuming that the only measurable state is
, then the proposed controller takes the form
where
k is the gain of the closed loop track synchronization controller.
By putting
in the (
1), the track error system can be constructed as
The main task after that is to calculate the value of the controller gain
k that ensures that the track synchronization control errors system (
3) is asymptotically stable.
In the next section, we apply this proposed method to the synchronization of two identical Lorenz systems.
3. Implementation of the Novel Track Synchronization Controller
In this section, we apply the proposed algorithm to synchronize two identical Lorenz chaotic systems via two types of synchronizations (i.e., complete and phase synchronization) by the same single-state feedback controller which has not been applied before in the literature.
The master and slave systems are selected to be two identical Lorenz systems in the following forms:
And
where the parameters are selected here to be
Figure 2 shows the time history of the master and the slave Lorenz chaotic models, where the initial conditions are
and
. The difference between the two systems is clear due to the difference in their initial values.
Let the synchronization errors system be
,
and
. Then the synchronization errors system can be represented as follows:
Our task here is to control the synchronization errors system using the single-state feedback track control strategy that has not been used before for this purpose. This method enables us to control the synchronization errors to track any predetermined values (reference values) for all .
Assume that the only measurable state in the system (6) is , then it is the only one that will be used to construct the closed-loop single-state feedback track control as follows.
The single-state feedback track controller is proposed to be
Figure 3 shows the control signals used to derive the synchronization error to follow its selected reference values.
Note that is the only state variable in the synchronization error system which is utilized to formulate the proposed closed-loop feedback and k is the gain of the proposed track controller with single-state feedback.
The single-state feedback closed-loop controlled synchronization error system becomes
Let
,
,
Substituting
,
,
and (7) in (
8), the tracking error dynamics of the synchronization error system (
6) can be represented as follows:
It is obvious that the point
is an equilibrium point of the tracking error system (9) whose Jacobian matrix is calculated and can be written as follows:
Our task here is to find the range of synchronization controller gain
k that guarantees the stability of all Jacobian matrix (
10) eigenvalues, which implies that the tracking synchronization control error dynamics
and
will be stable at the equilibrium point
asymptotically. As a result the synchronization errors
,
and
will track their references
,
and
respectively. The main task is to determine an appropriate control gain
k. Our result is recorded in Theorem 1 as follows.
Theorem 1. The synchronization error system (6) of the Lorenz synchronized systems (5) with the selected set of parameters via the tracking controller (7) can track any predetermined values, andif the controller gain satisfieswhere, and Proof. The Jacobian matrix characteristic Equation (
10) is written as follows:
where
and
By applying the Routh–Hurwitz stability test [
31], the eigenvalues of (
11) have negative real parts if and only if
, then
, then
, then
, then
, then
where
,
and
From (
12) to (
15), it easy to conclude that
, which completes the proof. □
Numerical Simulation of Tracking Synchronization of Two Identical Lorenz Systems
In this section, numerical simulation of the proposed tracking synchronization of two identical Lorenz systems is performed in order to demonstrate the above algorithm. Furthermore, we numerically solve systems (
4) and (
5) with parameters
and the initial conditions for the master and slave systems as
and
, respectively. The numerical simulation of the proposed algorithm is executed for two cases of synchronization, namely chaotic complete synchronization and chaotic phase synchronization.
Case 1. Complete synchronization
The reference values are adjusted in this case as
.
Figure 4a shows the synchronization errors system. It is clear that the synchronization errors approach zero in a short time.
Figure 4b shows the track synchronization control errors, from which it is obvious that the synchronization control errors tend to zero in a short time as predicted from the analytical results. In conclusion, from
Figure 4, the chaotic complete synchronization is achieved in a short time.
Case 2. Phase synchronization
In this case, the reference values are calculated as
. This case is clearly different from the previous one. The reference values depend on the initial conditions of the two systems. It is clear from
Figure 5a that the phase synchronization errors are tracking the predetermined reference values. The track synchronization control errors approach zero as shown in
Figure 5b as predicted from the analytical results. As a result,
Figure 5 proves that the phase synchronization is accomplished quickly.
In addition, in this case we will compute the phase difference and the amplitude of the master and slave systems numerically. The phase differences between the master and slave systems can be formed as
and
, where
and
are phases of the master and slave systems, respectively. The phase differences
and
in (
(
planes, respectively, are computed by and plotted in
Figure 6a,b. It is clear the phase differences
and
are finite and fluctuate in a chaotic mode, which implies that CPS is accomplished.
Figure 6c displays the relationship
and
. As shown, this relationship is a chaotic attractor and this means that
and
change in chaotic style and CPS is active.
In addition, the master system amplitude in (
projection is formed as
and the same is formed for the slave as
. In
Figure 7a,b, these amplitudes are graphed with respect to
t, whilst
Figure 2c displays
versus
.
Figure 7c shows that those amplitudes have a chaotic style and they are linearly independent (uncorrelated). Similar results can be found for the other phase variations and amplitude relationships for the master and slave models on different projection planes.
5. Secure Communication Application via Robust Track Synchronization Control Results
Secure communication is an important application of the topic and these types of synchronization have been studied in the literature [
34,
35,
36]. In this section we will take advantage of the results of the robust synchronization that we obtained in order to provide a secure communication application. In
Figure 12, we propose a scheme for complete robust synchronization secure communications. As is clear from this scheme, we consider the master and slave systems as transmitter and receiver systems, respectively. The most important thing that distinguishes this scheme from previous plans is the presence of noise when the message is sent from the sending equipment to the receiving equipment, and despite this, the message extraction process occurs successfully. Let the signal of the transmitted data message be denoted by
and let
be a complex invertible mapping that is used to encrypt the signals of the transmitter system in a chaotic manner. Then, combine the encrypted signal
with one
(or more) of the three state variables, with any pair of their products or with their product. For illustration purposes, after adding this to the state variable
the encrypted message becomes
. After that, the chaotic carrying signal of the sender device is produced and the encrypted message is transferred to the recipient end. When the message is sent there is strong noise that will intercept the message as well as the signals of the transmitter system. Therefore, if the synchronization used in making this application is not robust, this could affect message extraction. At the receiver side, we construct the controller as proposed in Equation (20). As a result, the synchronization between the drive (master) (
4) and the identical controlled (
5) frameworks will occur after a certain time
and the difference between the master system
x and the slave system states
y will be zero in a specific period
that is a time period longer than the time period
(
is the time period after which the synchronization process starts). For illustration purposes take
s, recovering
via a straightforward mutation
that starts at the receiver end. At the end, the sent data can be retrieved via an inverting operation
because the nonlinear function
is invertible.
The outputs of the numerical experiments are given in the following lines, where the values of the transmitter framework and receiver framework are adjusted to be as per those in
Section 3. For illustration purposes, the invertible function is selected as
and
is taken for example as
Suppose that the encrypted signal
is combined with the state variable
Figure 13 displays the results of secure communication via chaos synchronization. The sent message
and the transferred chaos signal
are, respectively, displayed in
Figure 13a,b.
Figure 13c displays the recovered message
.
Figure 13d displays the error between the authentic sent message and the data signal of the retrieved message. It is clear from
Figure 13d, that the sent message data signal
is retrieved exactly after a short transitory time.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}