Dynamics of Nonlocal Rod by Means of Fractional Laplacian


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. The Fractional Laplacian Model
2.2. The Local/Nonlocal Differential Model
“Nevertheless, for a meaningful comparison between a nonlocal elasticity model and experimental size effect data, two important conditions must be satisfied: (i) the classical continuum theory is recovered for vanishing nonlocal length, and (ii) the nonlocal system is stiffer than the local one.”
2.3. Nonlocal Rod Dynamics by Means of Fractional Laplacian Model
2.4. Numerical Approximation of Fractional Laplacian Problems
3. Results
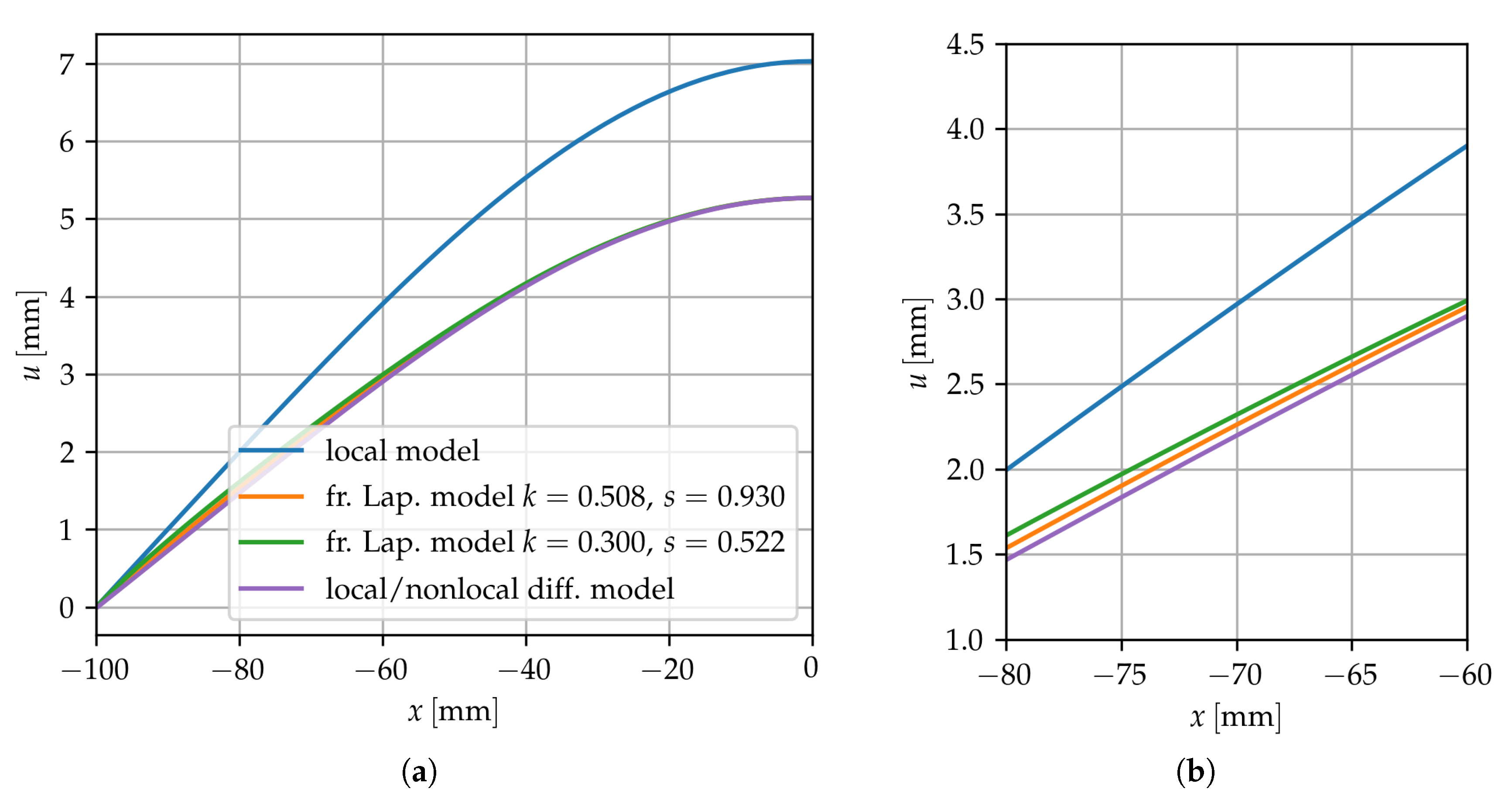
3.1. The Local/Nonlocal Differential Model
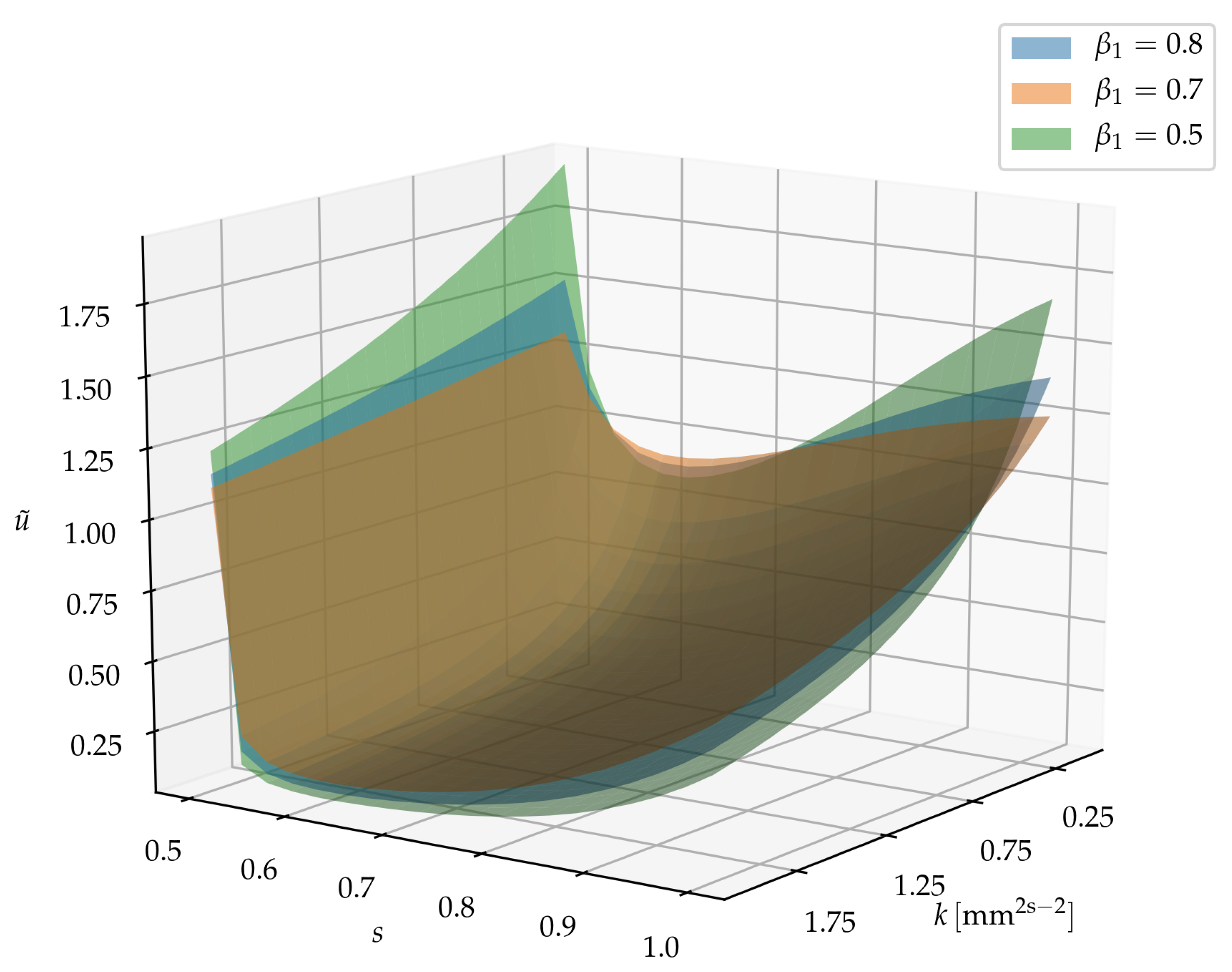
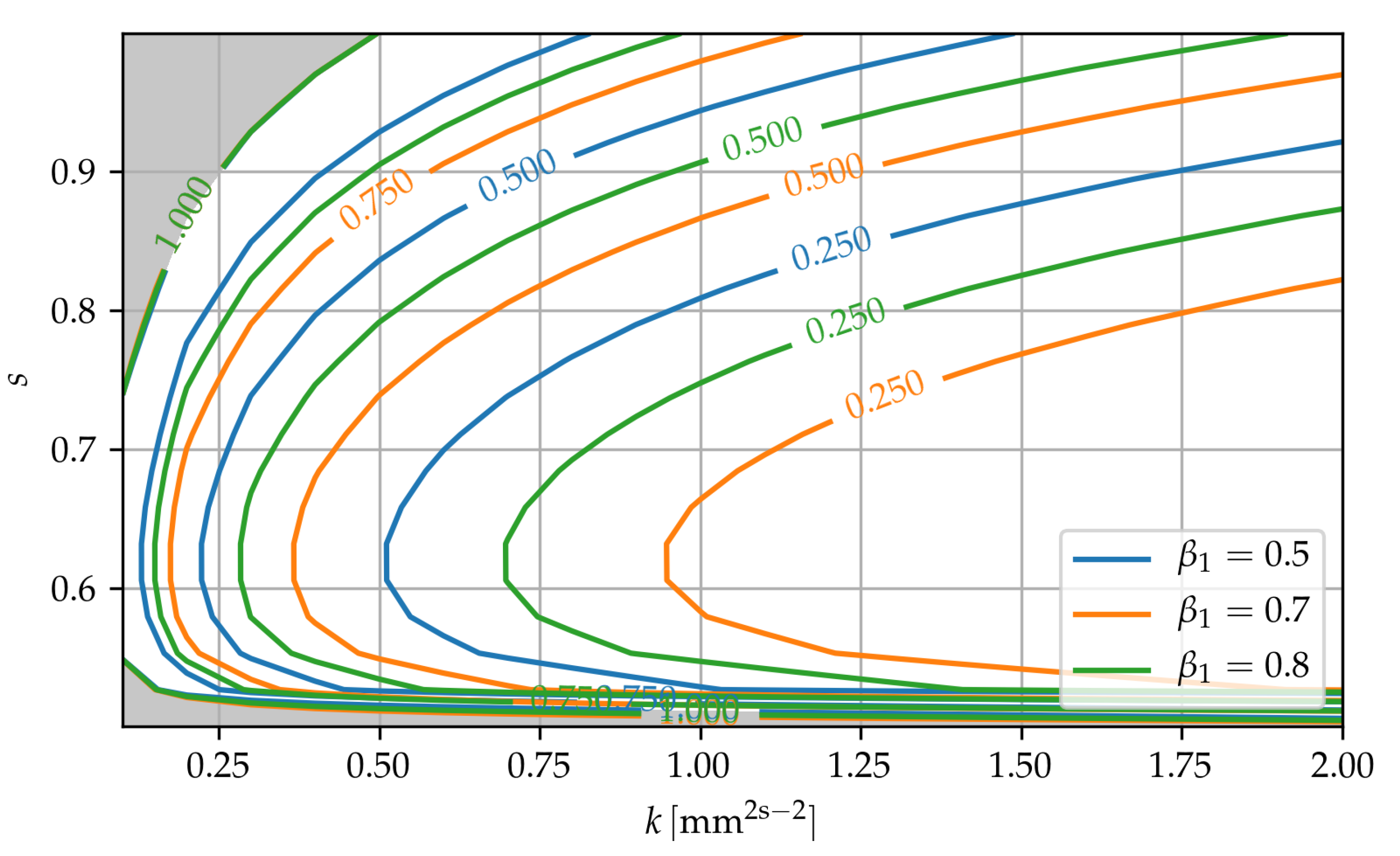
3.2. Fractional Laplacian Model and Comparison
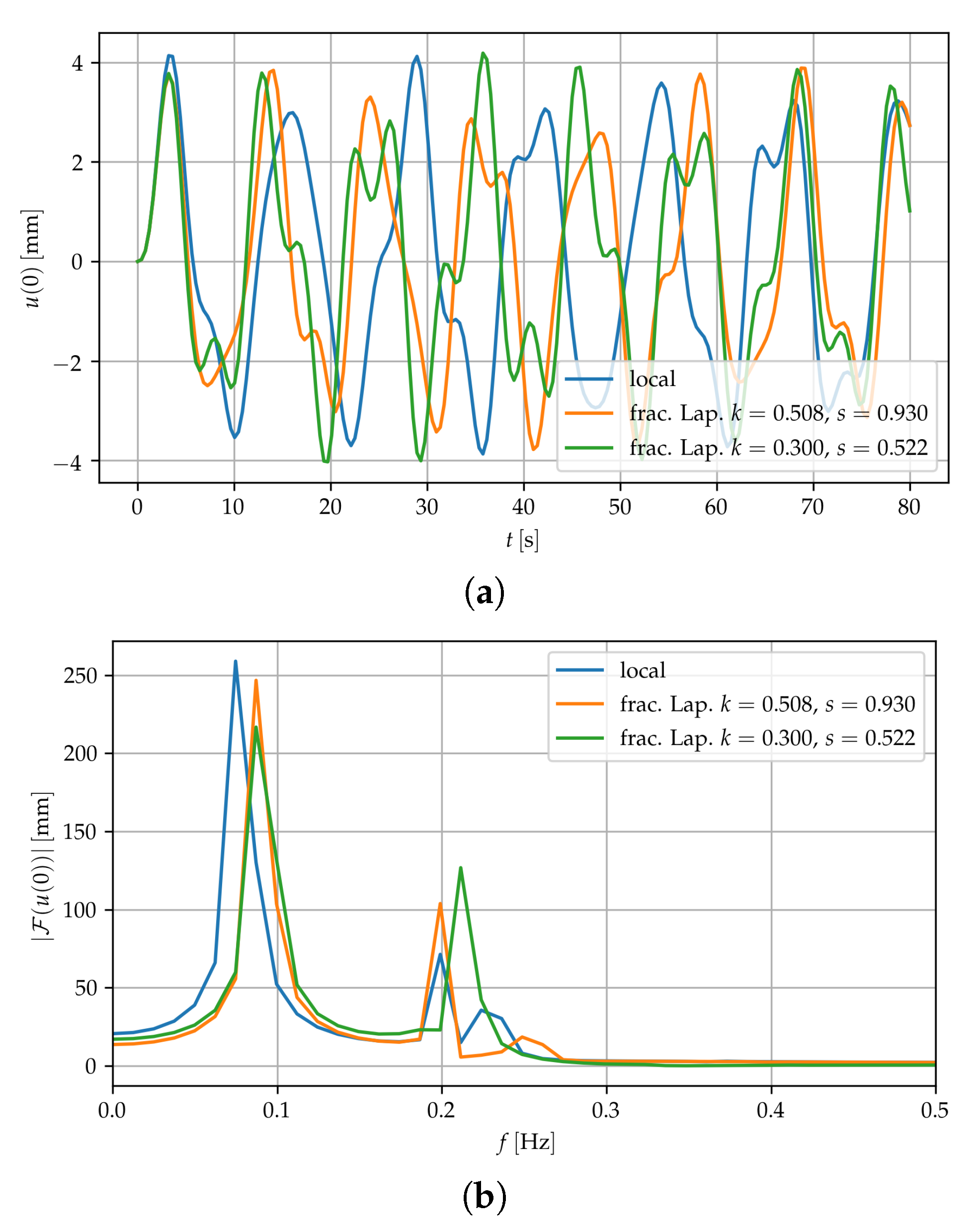
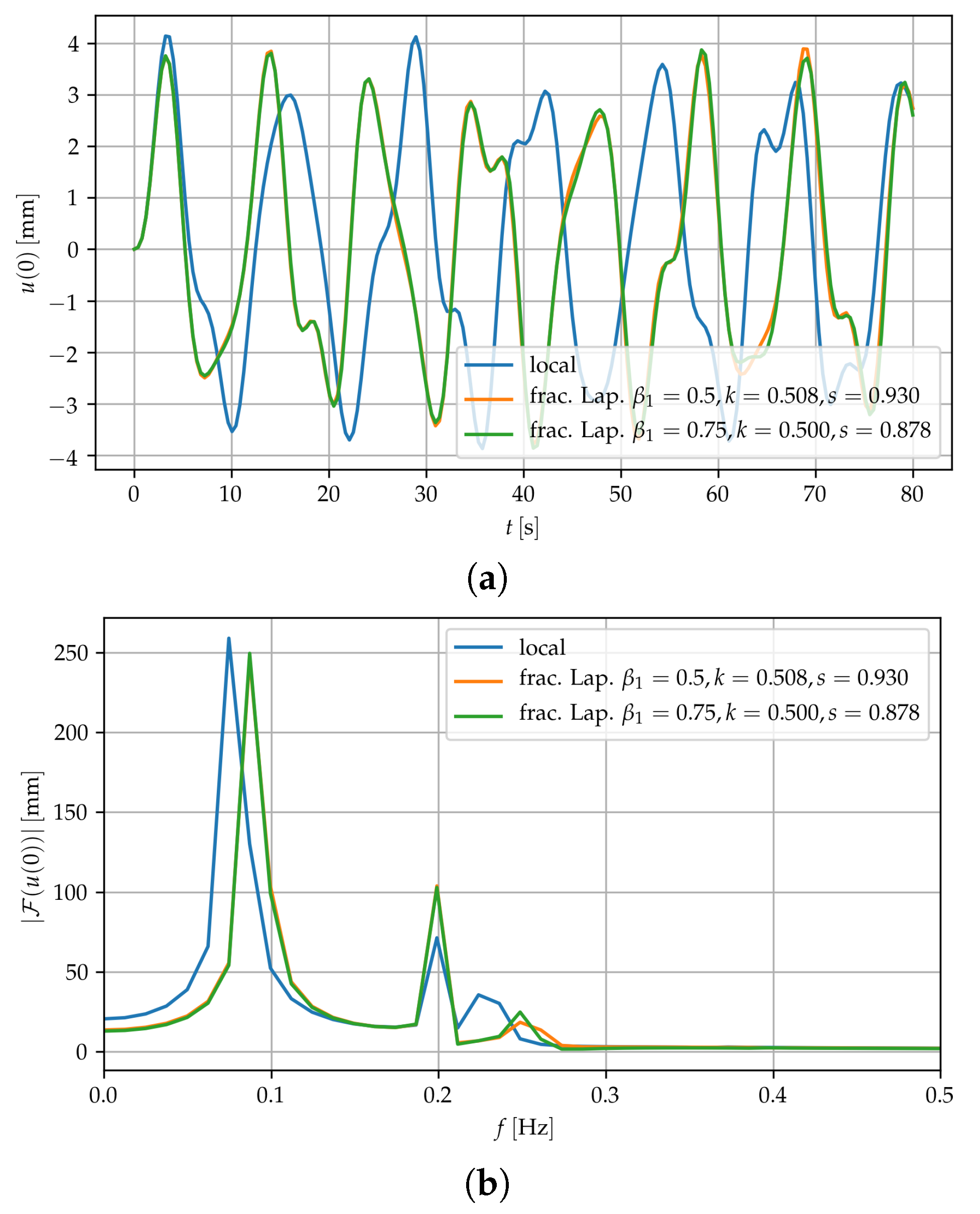
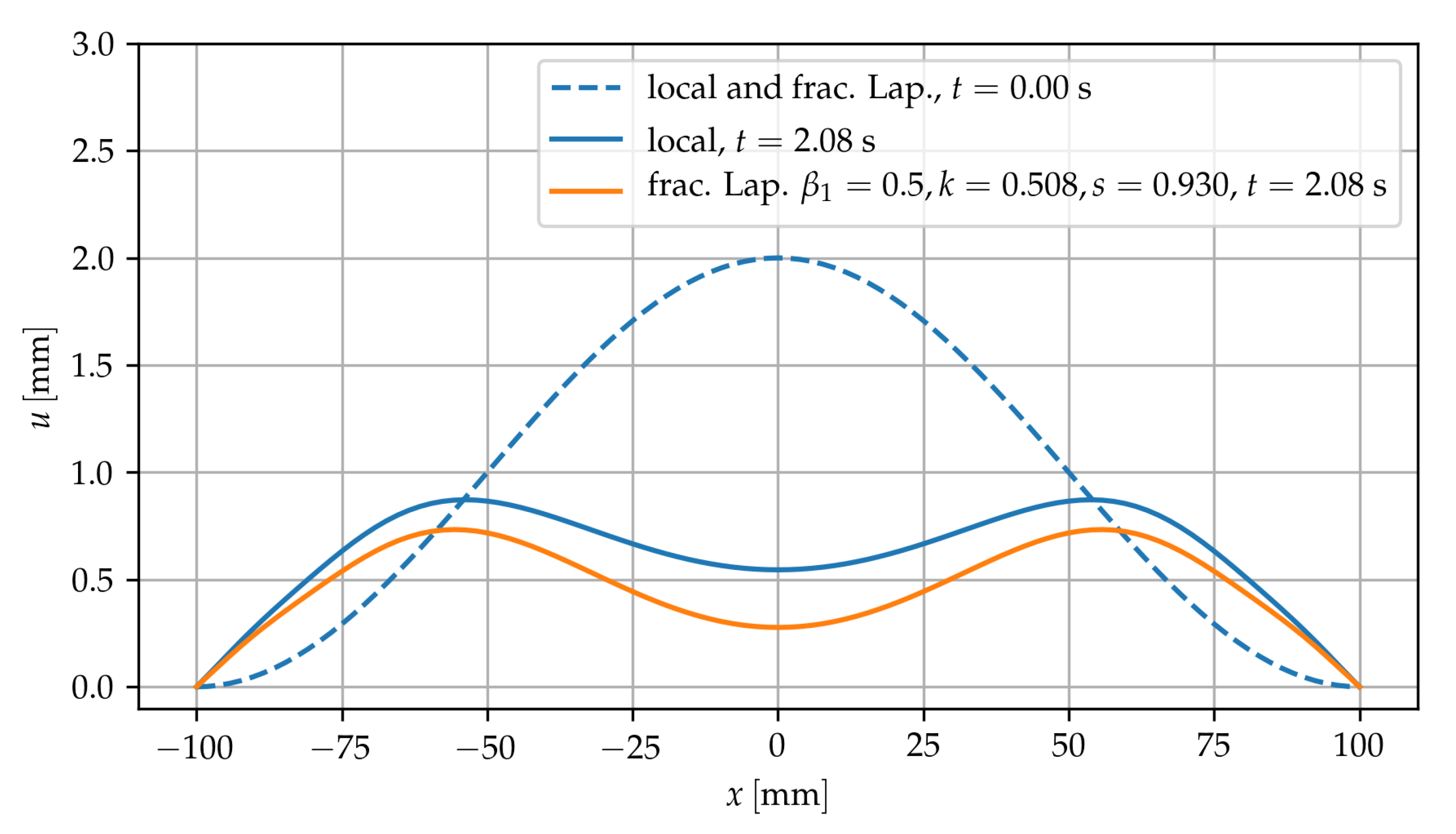
3.3. Response in Dynamics
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
List of Symbols
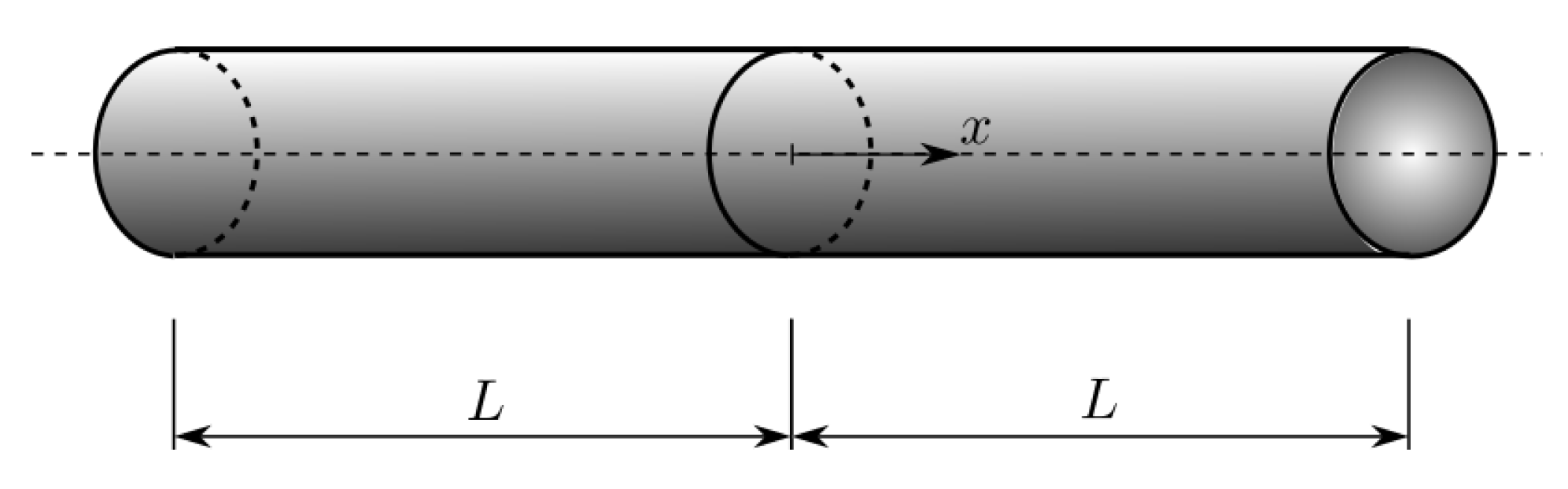
| x | position |
| u | displacement |
| L | half-length |
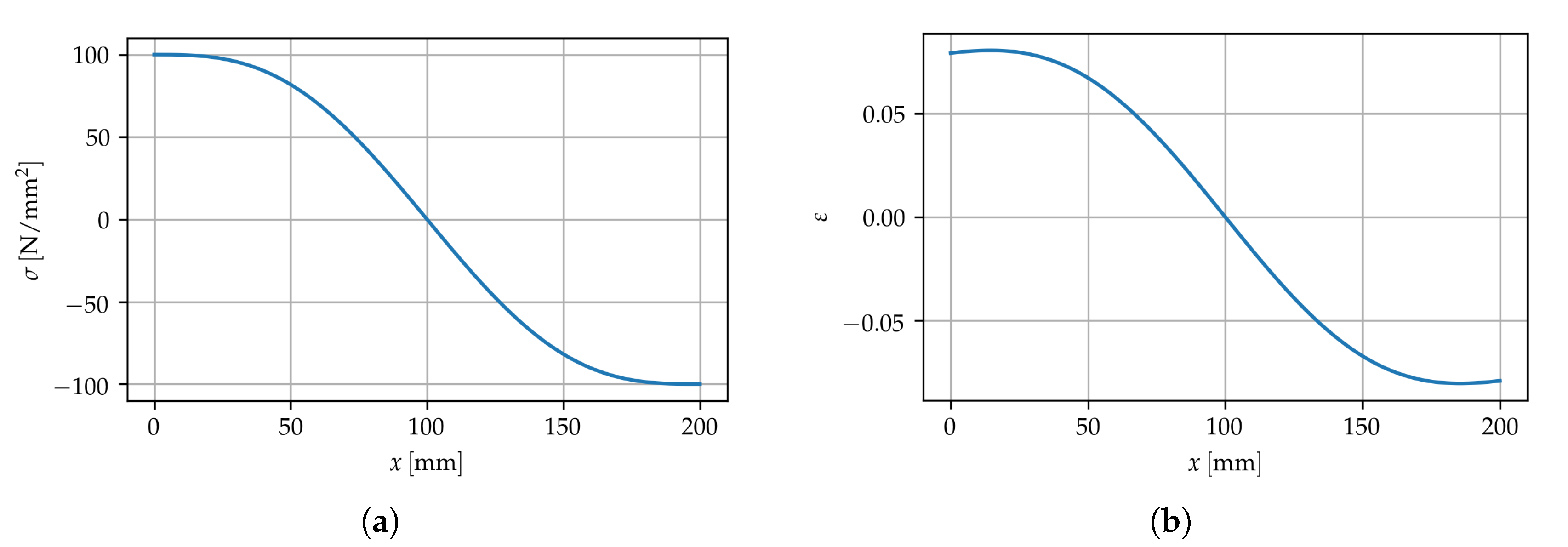
| stress | |
| strain | |
| E | Young’s modulus |
| mass density | |
| local fraction for fractional Laplacian model | |
| nonlocal fraction for fractional Laplacian model | |
| local fraction for local/nonlocal differential model | |
| nonlocal fraction for local/nonlocal differential model | |
| k | contant related to nonlocal behaviour in fractional Laplacian model |
| g | attenuation function |
| s | order of fractional Laplacian |
| fractional Laplacian operator | |
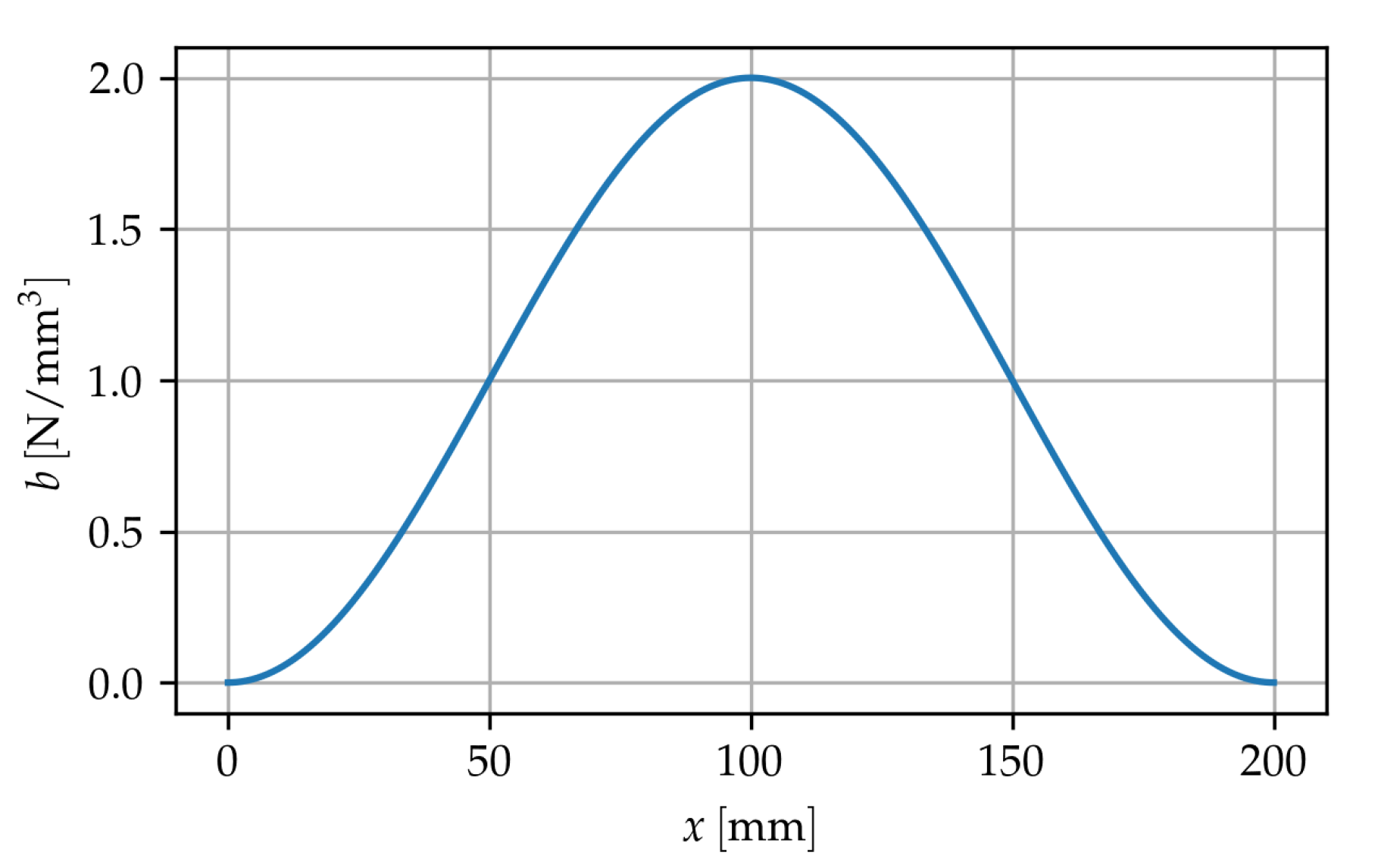
| b | distributed load |
| direct and inverse Fourier transform | |
| forward and backwards Riemann–Liouville fractional derivatives of order | |
| Gamma function | |
| c | parameter of fractional Laplacian model, |
| parameter of fractional Laplacian model, | |
| kernel of local/nonlocal differential model | |
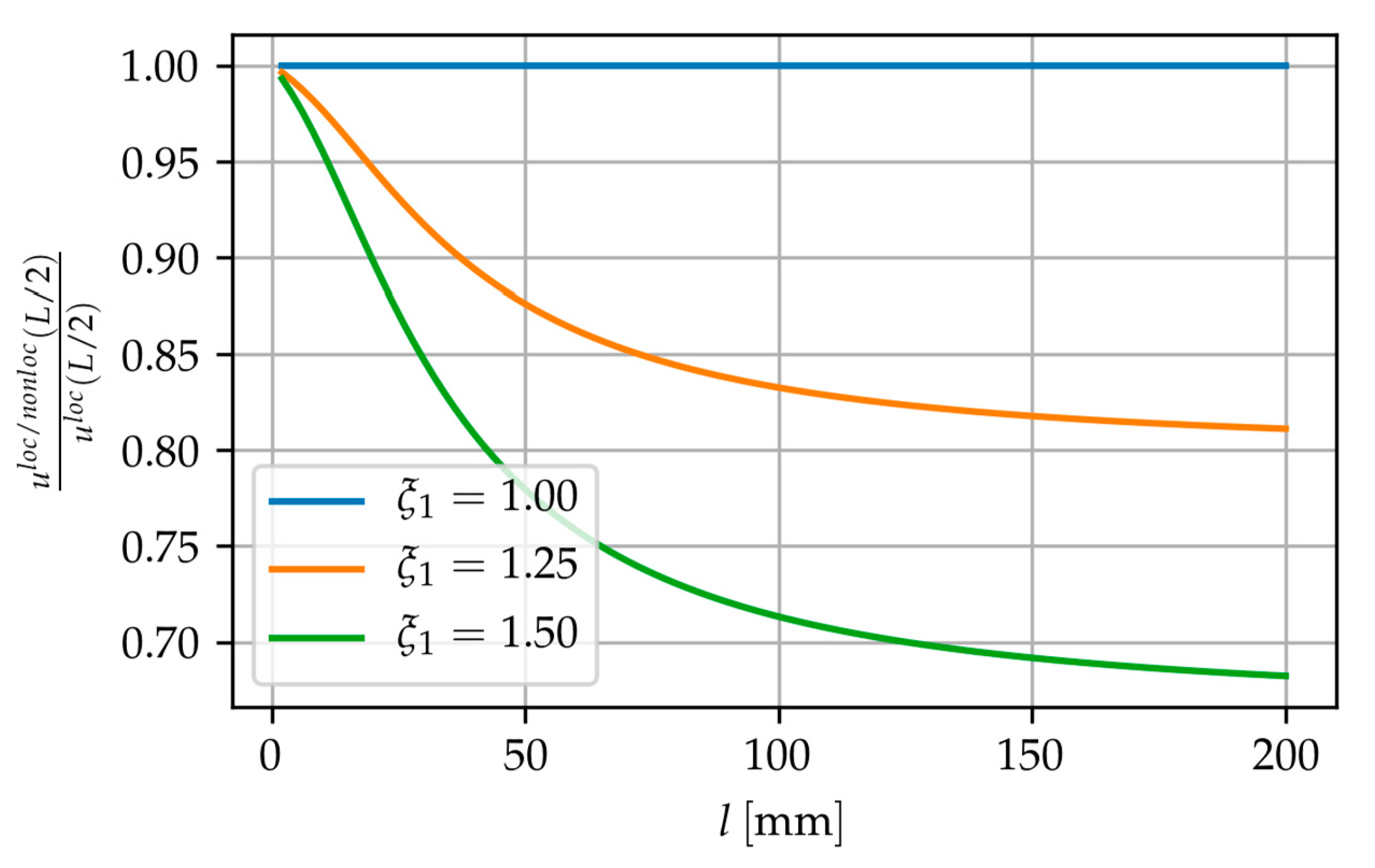
| l | nonlocal characteristic length for local/nonlocal differential model |
| n | points used for discretisation in space |
| weight for term in approximation of fractional Laplacian | |
| M | number of terms in approximation of fractional Laplacian |
| m | points used for discretisation in time |
| T | length of time history |
| parameters of Newmark’s method | |
| period of dynamic load |
Appendix A
References
- Eringen, A.C.; Edelen, D.G.B. On nonlocal elasticity. Int. J. Eng. Sci. 1972, 10, 233–248. [Google Scholar] [CrossRef]
- Bazant, Z.P. Why continuum damage is nonlocal: Micromechanics argument. J. Eng. Mech. 1991, 117, 1070–1087. [Google Scholar] [CrossRef]
- Atanackovic, T.M.; Stankovic, B. Generalized wave equation in nonlocal elasticity. Acta Mech. 2009, 208, 1–10. [Google Scholar] [CrossRef]
- Silling, S.A. Origin and Effect of Nonlocality in a Composite—Sandia Report SAND2013-8140; Sandia National Laboratories: Albuquerque, NM, USA, 2014. [Google Scholar]
- Challamel, N. Static and dynamic behaviour of nonlocal elastic bar using integral strain-based and peridynamic models. C. R. Mech. 2018, 346, 320–335. [Google Scholar] [CrossRef]
- Eringen, A.C. Nonlocal Continuum Field Theories; Springer: New York, NY, USA, 2002. [Google Scholar]
- Eringen, A.C. Vistas of nonlocal continuum physics. Int. J. Eng. Sci. 1992, 30, 1551–1565. [Google Scholar] [CrossRef]
- Barretta, R.; Feo, L.; Luciano, R.; Marotti de Sciarra, F. Application of an enhanced version of the Eringen differential model to nanotechnology. Compos. Part B Eng. 2016, 96, 274–280. [Google Scholar] [CrossRef]
- Romano, G.; Barretta, R. Stress-driven versus strain-driven nonlocal integral model for elastic nano-beams. Compos. Part B Eng. 2017, 114, 184–188. [Google Scholar] [CrossRef]
- Silling, S.A.; Zimmermann, M.; Abeyaratne, R. Deformation of a peridynamic bar. J. Elast. 2003, 73, 173–190. [Google Scholar] [CrossRef]
- Apuzzo, A.; Barretta, R.; Canadija, M.; Feo, L.; Luciano, R.; Marotti de Sciarra, F. A closed-form model for torsion of nanobeams with an enhanced nonlocal formulation. Compos. Part B Eng. 2017, 108, 315–324. [Google Scholar] [CrossRef]
- Fakher, M.; Rahmanian, S.; Hosseini-Hashemi, S. On the carbon nanotube mass nanosensor by integral form of nonlocal elasticity. Int. J. Mech. Sci. 2019, 150, 445–457. [Google Scholar] [CrossRef]
- De Rosa, M.A.; Lippiello, M. Nonlocal Timoshenko frequency analysis of single-walled carbon nanotube with attached mass: An alternative hamiltonian approach. Compos. Part B Eng. 2017, 111, 409–418. [Google Scholar] [CrossRef]
- Shen, Z.-B.; Sheng, L.-P.; Li, X.-F.; Tang, G.-J. Nonlocal Timoshenko beam theory for vibration of carbon nanotube-based biosensor. Physica E 2002, 44, 1169–1175. [Google Scholar] [CrossRef]
- Barretta, R.; Ali Faghidian, S.; de Sciarra, F.M.; Pinnola, F.P. Timoshenko nonlocal strain gradient nanobeams: Variational consistency, exact solutions and carbon nanotube Young moduli. Mech. Adv. Mater. Struct. 2019. [Google Scholar] [CrossRef]
- Liaskos, K.N.; Pantelous, A.A.; Kougioumtzoglou, I.A.; Meimaris, A.T.; Pirrotta, A. Implicit analytic solutions for a nonlinear fractional partial differential beam equation. Commun. Nonlinear Sci. Numer. Simul. 2020, 85, 105219. [Google Scholar] [CrossRef]
- Alotta, G.; Failla, G.; Pinnola, F.P. Stochastic analysis of a nonlocal fractional viscoelastic bar forced by Gaussian white noise. ASCE-ASME J. Risk. Uncertain. Eng. Syst. Part B Mech. Eng. 2017, 3, 030904. [Google Scholar] [CrossRef]
- Alotta, G.; Di Paola, M.; Failla, G.; Pinnola, F.P. On the dynamics of non-local fractional viscoelastic beams under stochastic agencies. Compos. Part B Eng. 2018, 137, 102–110. [Google Scholar] [CrossRef]
- Śniady, P.; Podwórna, M.; Idzikowski, R. Stochastic vibrations of the Euler–Bernoulli beam based on various versions of the gradient nonlocal elasticity theory. Probab. Eng. Mech. 2019, 56, 27–34. [Google Scholar] [CrossRef]
- Fuschi, P.; Pisano, A.A.; De Domenico, D. Plane stress problems in nonlocal elasticity: Finite element solutions with a strain-difference-based formulation. J. Math. Anal. Appl. 2015, 431, 714–736. [Google Scholar] [CrossRef]
- Tuna, M.; Kirca, M.; Trovalusci, P. Deformation of atomic models and their equivalent continuum counterparts using Eringen’s two-phase local/nonlocal model. Mech. Res. Commun. 2019, 97, 26–32. [Google Scholar] [CrossRef]
- Pinnola, F.P.; Ali Faghidian, S.; Barretta, R.; Marotti de Sciarra, F. Variationally consistent dynamics of nonlocal gradient elastic beams. Int. J. Eng. Sci. 2020, 149, 103220. [Google Scholar] [CrossRef]
- Romano, G.; Barretta, R.; Diaco, M.; Marotti de Sciarra, F. Constitutive boundary conditions and paradoxes in nonlocal elastic nanobeams. Int. J. Mech. Sci. 2017, 121, 151–156. [Google Scholar] [CrossRef]
- Li, G.; Xing, Y.; Wang, Z.; Sun, Q. Effect of boundary conditions and constitutive relations on the free vibration of nonlocal beams. Results Phys. 2020, 19, 103414. [Google Scholar] [CrossRef]
- Carpinteri, A.; Cornetti, P.; Sapora, A. Static-kinematic fractional operators for fractal and nonlocal solids. Z. Angew. Math. Mech. 2009, 89, 207–217. [Google Scholar] [CrossRef]
- Di Paola, M.; Zingales, M. Long-range cohesive interactions of nonlocal continuum faced by fractional calculus. Int. J. Solids Struct. 2008, 45, 5642–5659. [Google Scholar] [CrossRef]
- Autori, G.; Cluni, F.; Gusella, V.; Pucci, P. Mathematical models for nonlocal elastic composite materials. Adv. Nonlinear Anal. 2017, 6, 355–382. [Google Scholar] [CrossRef]
- Autuori, G.; Cluni, F.; Gusella, V.; Pucci, P. Effects of the fractional laplacian order on the nonlocal elastic rod response. ASCE-ASME J. Risk. Uncertain. Eng. Syst. Part B Mech. Eng. 2017, 3, 030902. [Google Scholar] [CrossRef]
- Tarasov, V.E. Fractional gradient elasticity from spatial dispersion law. Condens. Matter Phys. 2014, 2014, 794097. [Google Scholar] [CrossRef][Green Version]
- Cottone, G.; Di Paola, M.; Zingales, M. Elastic waves propagation in 1D fractional nonlocal continuum. Physica E 2009, 42, 95–103. [Google Scholar] [CrossRef]
- Sapora, A.; Cornetti, P.; Carpinteri, A. Wave propagation in nonlocal elastic continua modelled by a fractional calculus approach. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 63–74. [Google Scholar] [CrossRef]
- Autuori, G.; Cluni, F.; Gusella, V.; Pucci, P. Longitudinal waves in a nonlocal rod by fractional Laplacian. Mech. Adv. Mater. Struct. 2020, 27, 599–604. [Google Scholar] [CrossRef]
- Benvenuti, E.; Simone, A. One-dimensional nonlocal and gradient elasticity: Closed-form solution and size effect. Mech. Res. Commun. 2013, 48, 46–51. [Google Scholar] [CrossRef]
- Evragov, A.; Bellido, J.C. From non-local Eringen’s model to fractional elasticity. Mech. Res. Commun. 2019, 24, 1935–1953. [Google Scholar]
- Huang, Y.; Oberman, A. Numerical methods for the fractional Laplacian: A finite difference-quadrature approach. SIAM J. Numer. Anal. 2014, 52, 3056–3084. [Google Scholar] [CrossRef]
- Chopra, A.K. Dynamics of Structures; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2007. [Google Scholar]
- Moré, J.J.; Garbow, B.S.; Hillstrom, K.E. User Guide for MINPACK-1—Technical Report ANL-80-74; Argonne National Laboratory: Lemont, IL, USA, 1980.
- Meurer, A.; Smith, C.P.; Paprocki, M.; Čertík, O.; Kirpichev, S.B.; Rocklin, M.; Kumar, A.; Ivanov, S.; Moore, J.K.; Singh, S.; et al. SymPy: Symbolic computing in Python. PeerJ Comput. Sci. 2017, 3, e103. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gusella, V.; Autuori, G.; Pucci, P.; Cluni, F. Dynamics of Nonlocal Rod by Means of Fractional Laplacian. Symmetry 2020, 12, 1933. https://doi.org/10.3390/sym12121933
Gusella V, Autuori G, Pucci P, Cluni F. Dynamics of Nonlocal Rod by Means of Fractional Laplacian. Symmetry. 2020; 12(12):1933. https://doi.org/10.3390/sym12121933
Chicago/Turabian StyleGusella, Vittorio, Giuseppina Autuori, Patrizia Pucci, and Federico Cluni. 2020. "Dynamics of Nonlocal Rod by Means of Fractional Laplacian" Symmetry 12, no. 12: 1933. https://doi.org/10.3390/sym12121933
APA StyleGusella, V., Autuori, G., Pucci, P., & Cluni, F. (2020). Dynamics of Nonlocal Rod by Means of Fractional Laplacian. Symmetry, 12(12), 1933. https://doi.org/10.3390/sym12121933